


Behavioral Robots with various Controls Generalized Braitenberg Vehicles.
88
Behavioral Robots Behavioral Robots with various Controls with various Controls Generalized Braitenberg Generalized Braitenberg Vehicles Vehicles
-
date post
19-Dec-2015 -
Category
Documents
-
view
228 -
download
3
Transcript of Behavioral Robots with various Controls Generalized Braitenberg Vehicles.
Behavioral Robots Behavioral Robots with various Controlswith various Controls
Generalized Braitenberg Generalized Braitenberg VehiclesVehicles
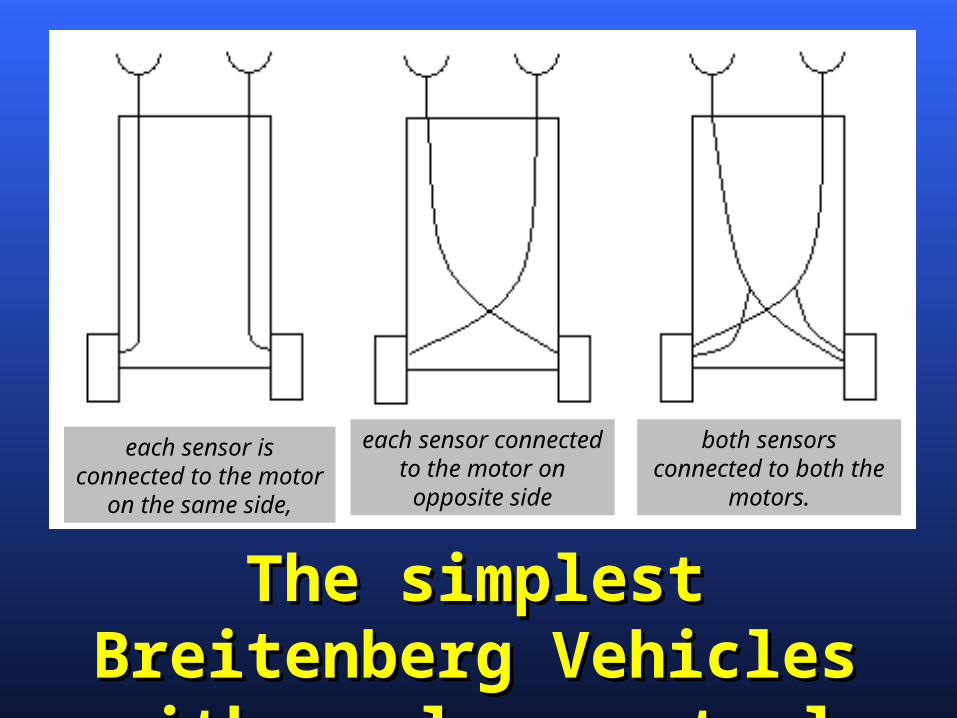
The simplest Breitenberg The simplest Breitenberg Vehicles with analog controlVehicles with analog control
each sensor is connected to the motor
on the same side,
each sensor connected to the motor
on opposite side
both sensors connected to both the
motors.
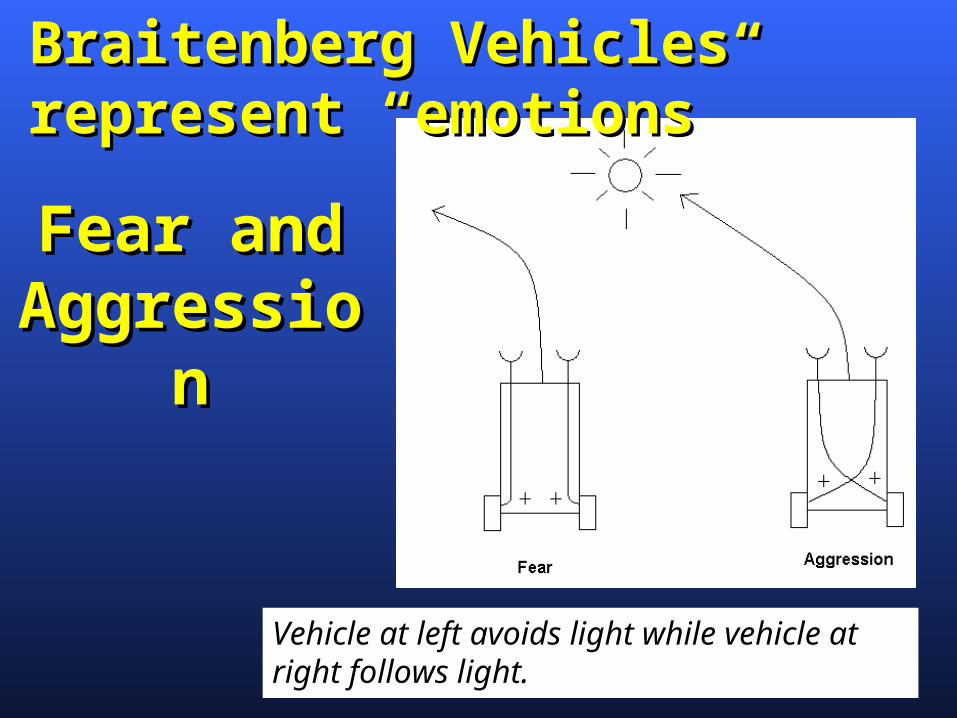
Fear and Fear and AggressionAggression
Vehicle at left avoids light while vehicle at right follows light.
Braitenberg Vehicles represent Braitenberg Vehicles represent “emotions”“emotions”
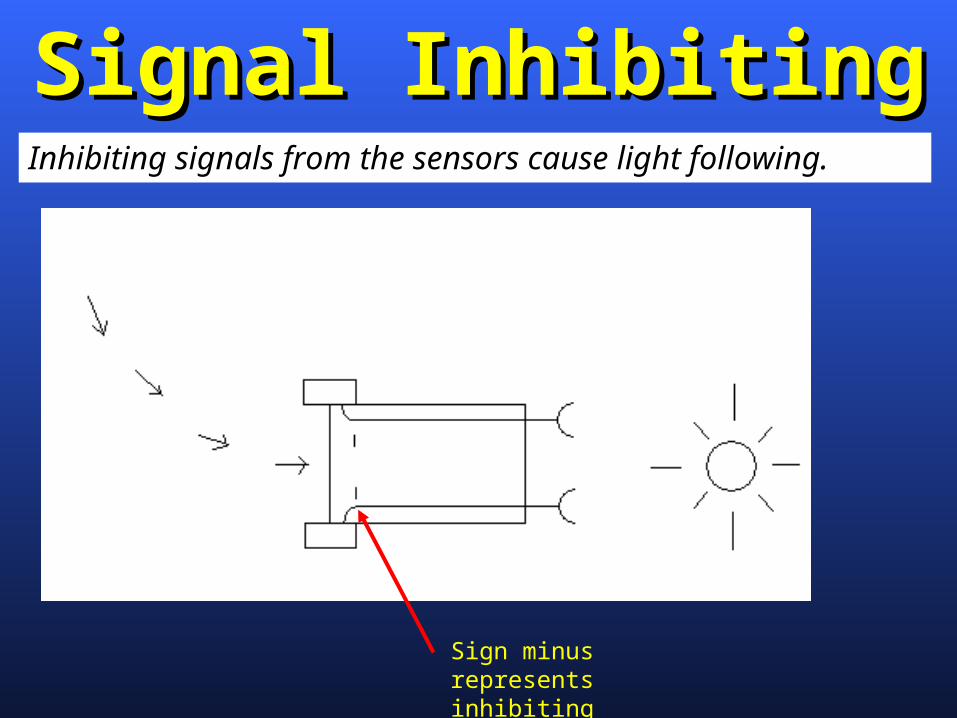
Signal InhibitingSignal InhibitingInhibiting signals from the sensors cause light following.
Sign minus represents inhibiting
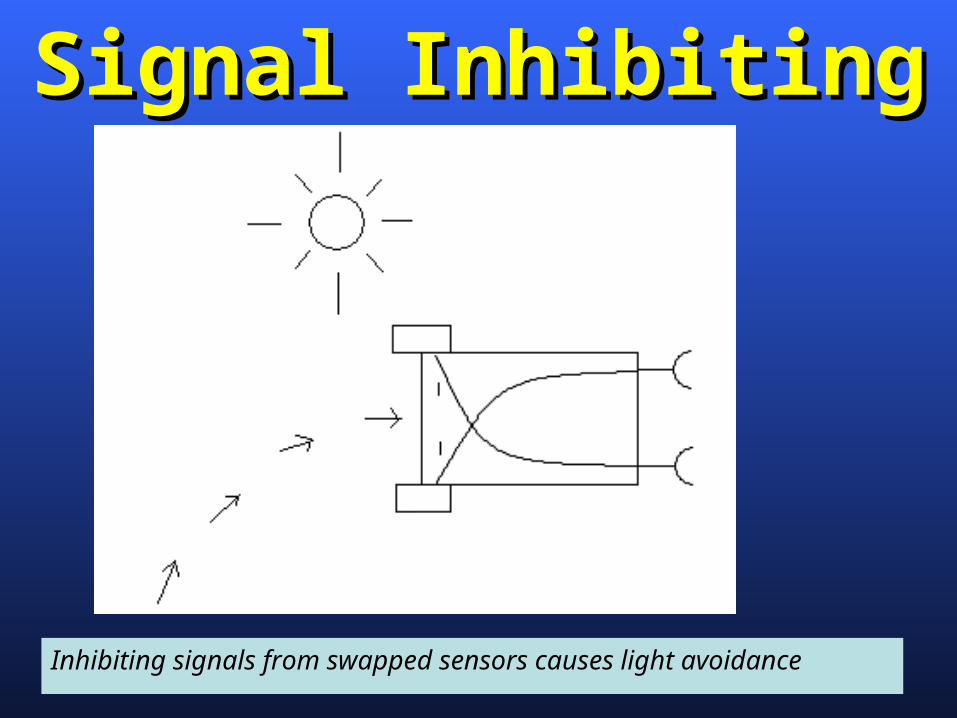
Inhibiting signals from swapped sensors causes light avoidance
Signal InhibitingSignal Inhibiting
Signals and logic in Signals and logic in Braitenberg VehiclesBraitenberg Vehicles
• Signals can be:– Analog– Binary– Multiple-valued– Fuzzy– Quantum Sensing can be done in Sensing can be done in
quantum world (Hilbert Space) quantum world (Hilbert Space) or in standard macro-worldor in standard macro-world
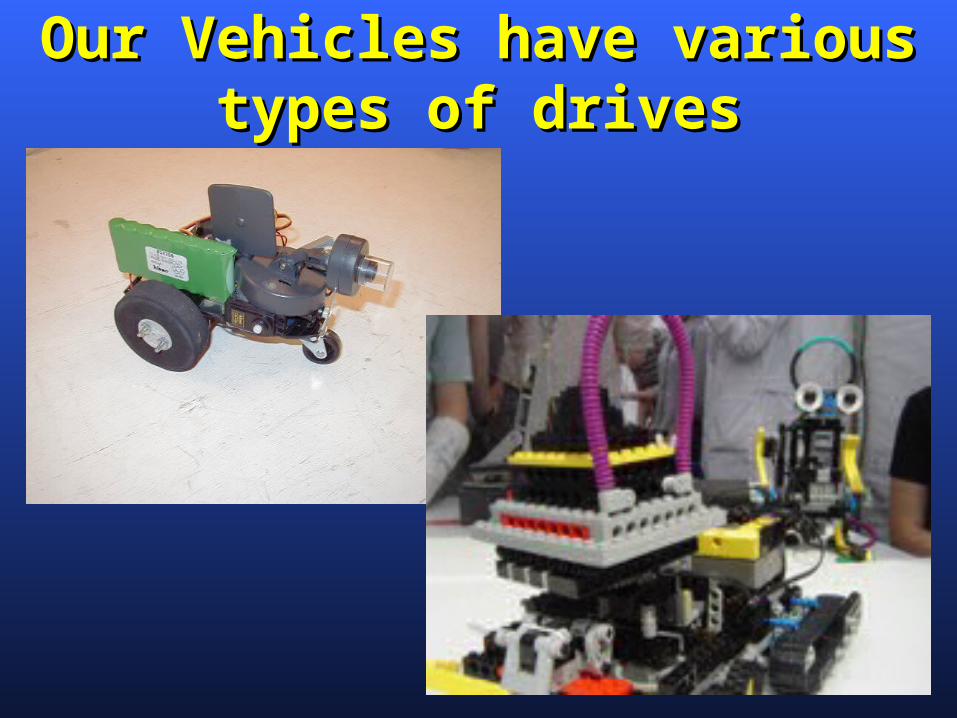
Our Vehicles have various types Our Vehicles have various types of drivesof drives
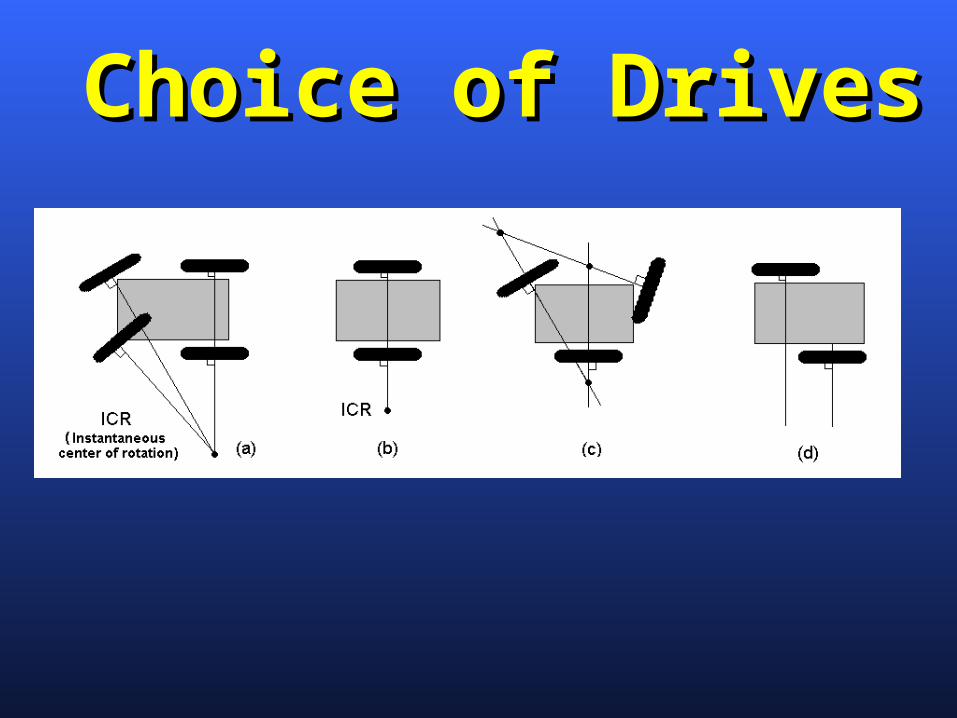
Choice of DrivesChoice of Drives
Braitenberg Vehicles Sensory and Braitenberg Vehicles Sensory and Effectors CharacteristicsEffectors Characteristics
• Our understanding of Braitenberg Vehicles is much more generalmuch more general than in literature:– Sensing,
– Controls (functions, automata, distributed automata),
– Effectors (Drives and their Control, walking etc)
Emotion asEmotion as synthesizedsynthesized behaviorbehavior
Emotional state = state of all emotion variables
Physical variables = positions, speeds, accelerations, words,
Serchuk et al discuss emotion as mapping from Serchuk et al discuss emotion as mapping from internal state to observable output behavior. We want internal state to observable output behavior. We want to design these mappings well, so that they wil be to design these mappings well, so that they wil be similar to humanssimilar to humans
Emotion asEmotion as emergent, emergent, evolvableevolvable behaviorbehavior
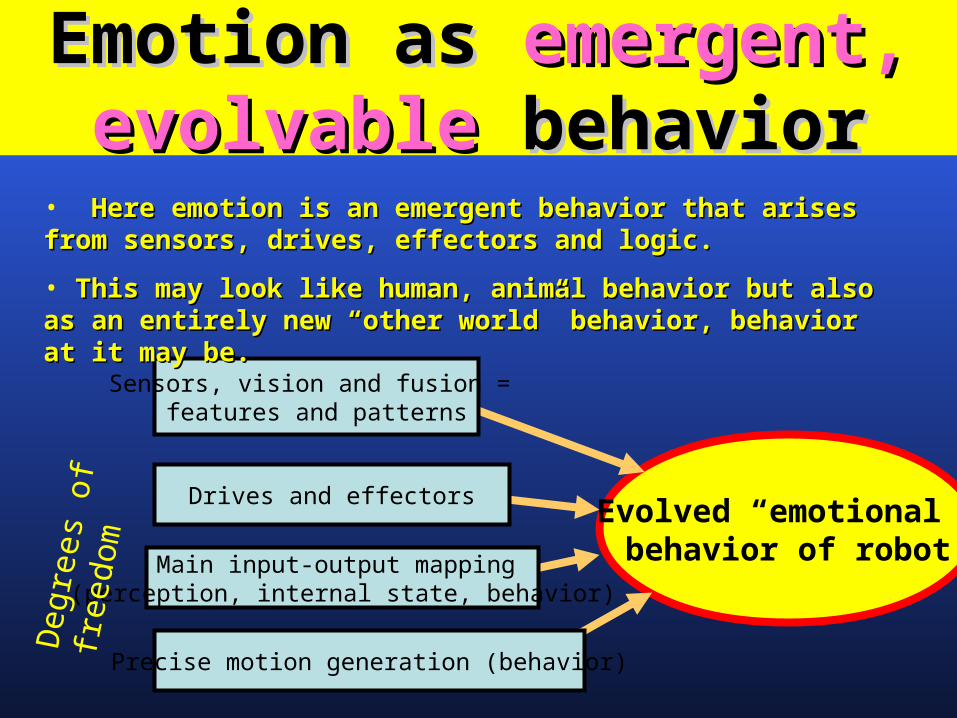
Evolved “emotional” behavior of robot
Sensors, vision and fusion = features and patterns
Drives and effectors
Main input-output mapping (perception, internal state, behavior)
Precise motion generation (behavior)
Deg
rees
of f
reed
om
• Here emotion is an emergent behavior that arises from sensors, Here emotion is an emergent behavior that arises from sensors, drives, effectors and logic.drives, effectors and logic.
• This may look like human, animal behavior but also as an entirely This may look like human, animal behavior but also as an entirely new “other world” behavior, behavior at it may be.new “other world” behavior, behavior at it may be.
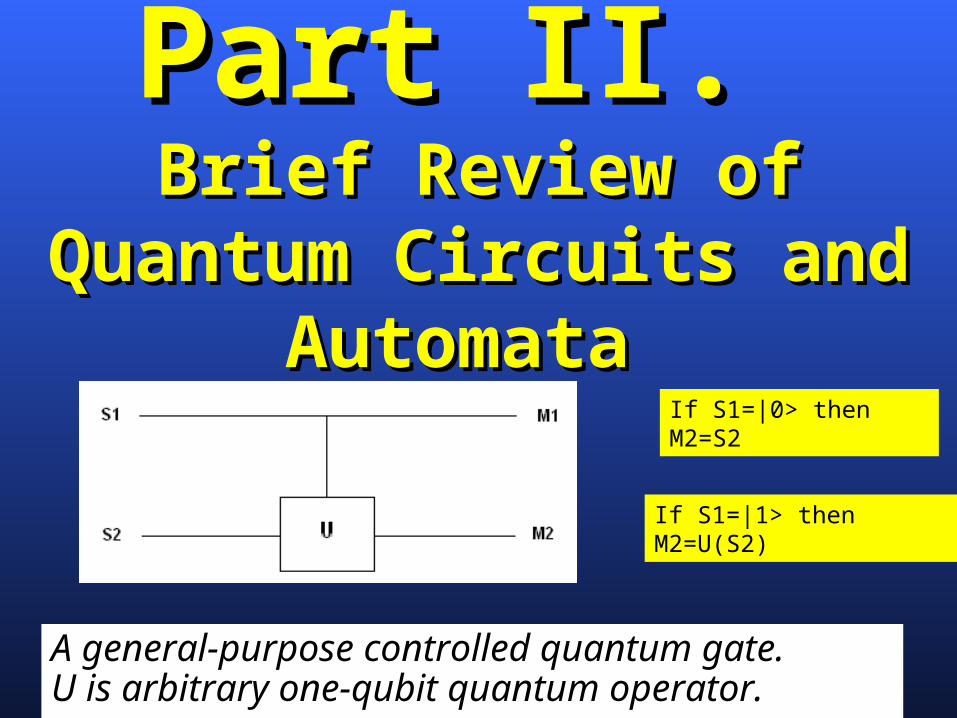
Part II. Part II. Brief Review of Quantum Brief Review of Quantum Circuits and Automata Circuits and Automata
A general-purpose controlled quantum gate. U is arbitrary one-qubit quantum operator.
If S1=|0> then M2=S2
If S1=|1> then M2=U(S2)
Analysis of Quantum Circuits Analysis of Quantum Circuits and Automataand Automata
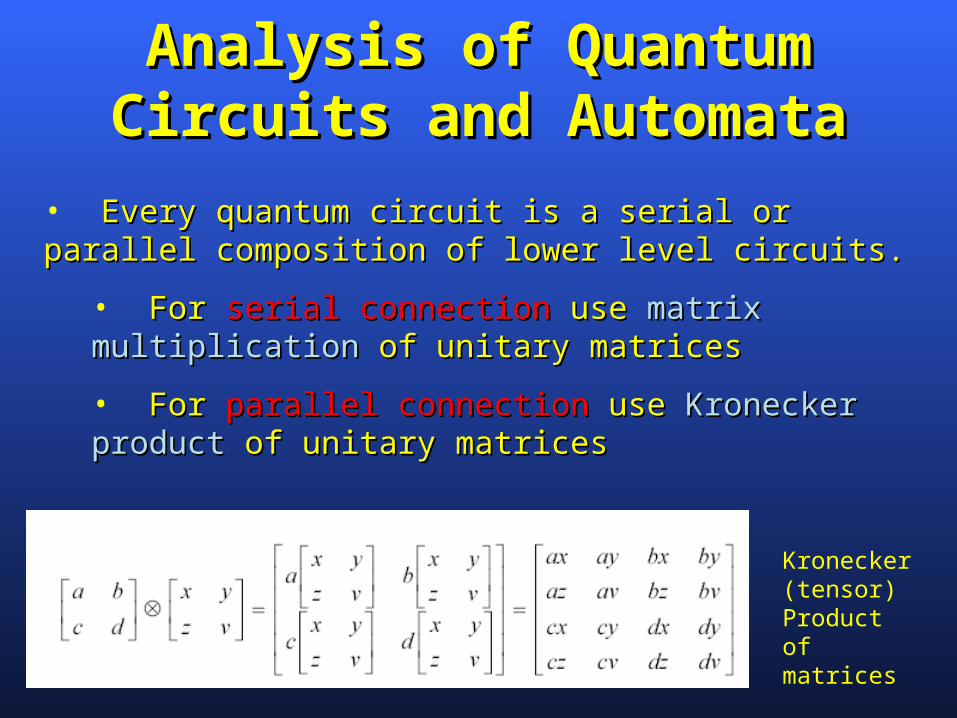
Kronecker (tensor) Product of matrices
• Every quantum circuit is a serial or parallel composition of Every quantum circuit is a serial or parallel composition of lower level circuits.lower level circuits.
• For For serial connectionserial connection use use matrix multiplicationmatrix multiplication of unitary of unitary matricesmatrices
• For For parallel connectionparallel connection use use Kronecker productKronecker product of of unitary matricesunitary matrices
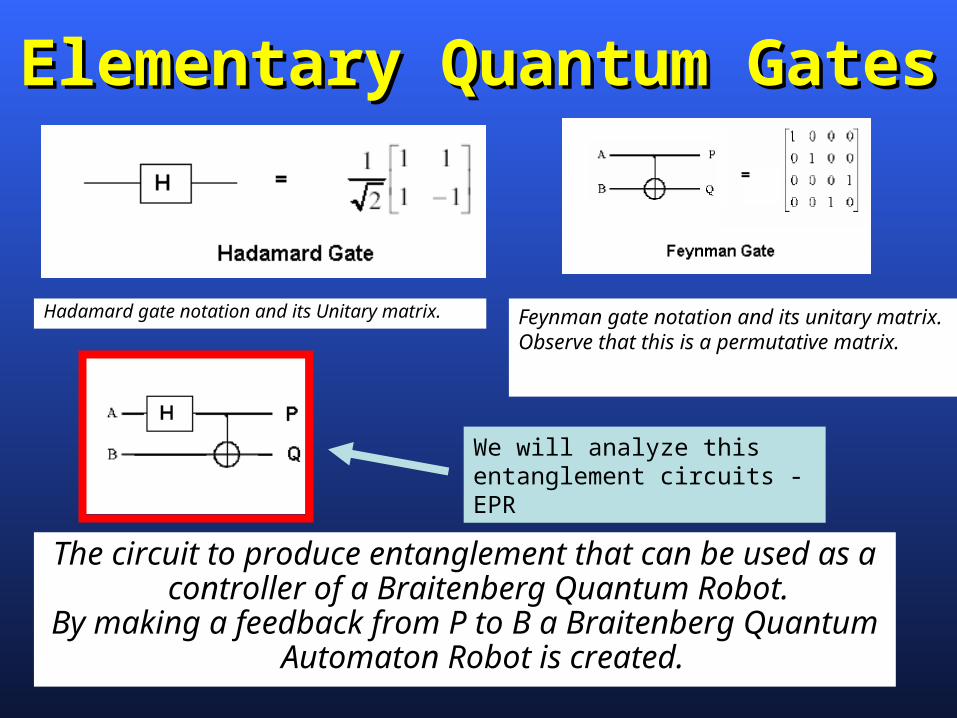
Elementary Quantum GatesElementary Quantum Gates
Hadamard gate notation and its Unitary matrix. Feynman gate notation and its unitary matrix. Observe that this is a permutative matrix.
The circuit to produce entanglement that can be used as a controller of a Braitenberg Quantum Robot.
By making a feedback from P to B a Braitenberg Quantum Automaton Robot is created.
We will analyze this entanglement circuits - EPR
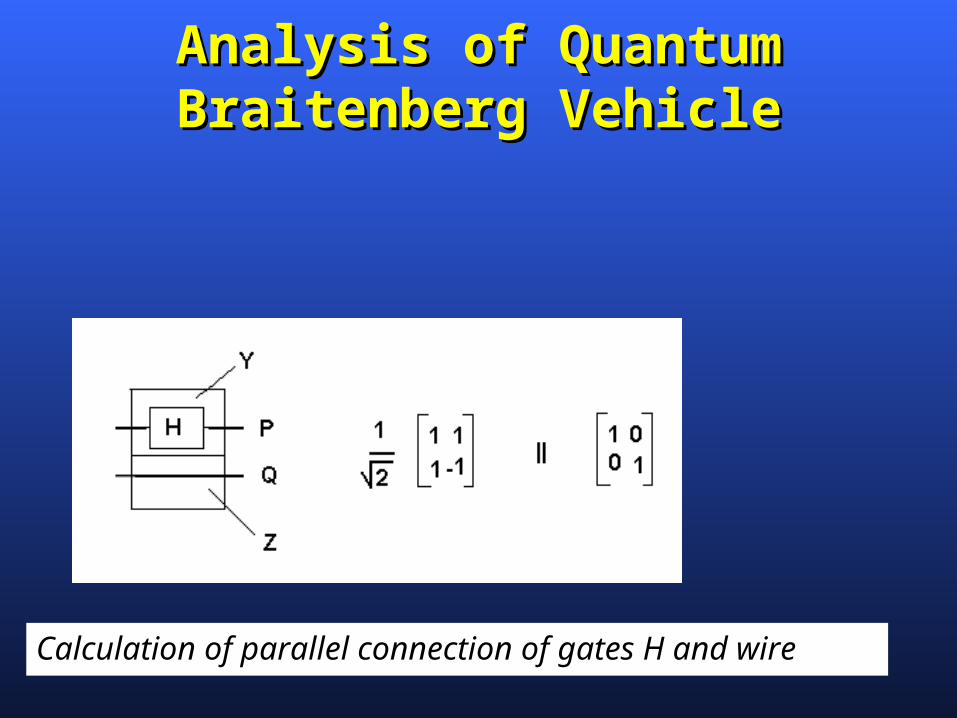
Analysis of Quantum Braitenberg Analysis of Quantum Braitenberg VehicleVehicle
Calculation of parallel connection of gates H and wire

Calculation of Kronecker Product of Hadamard and wire using their unitary matrices
Analysis of Quantum Braitenberg Analysis of Quantum Braitenberg VehicleVehicle
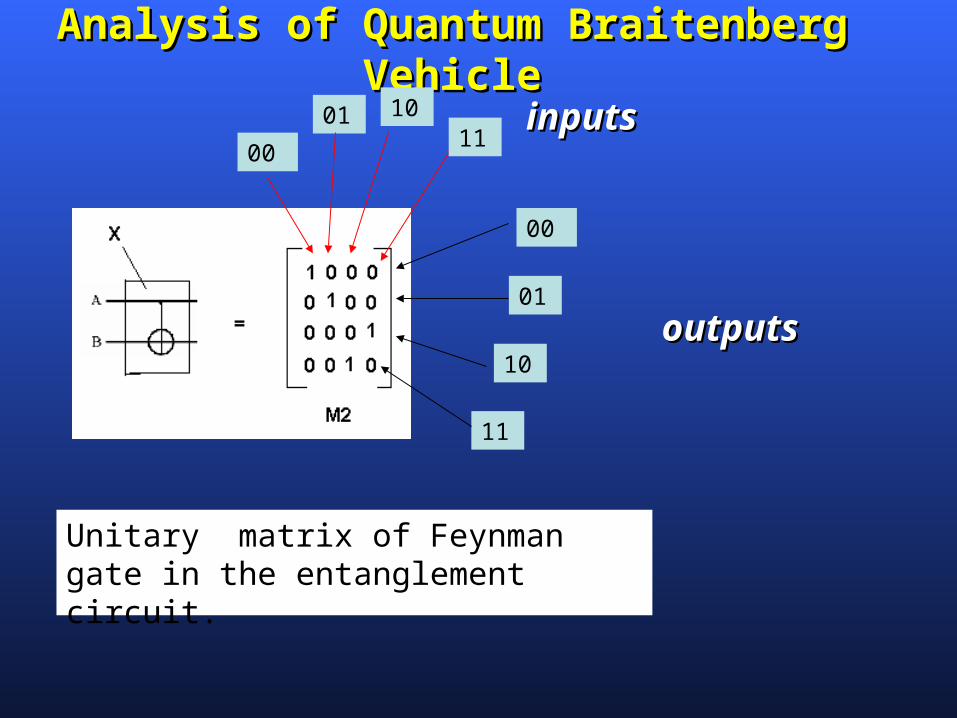
Unitary matrix of Feynman gate in the entanglement circuit.
Analysis of Quantum Braitenberg VehicleAnalysis of Quantum Braitenberg Vehicle
00
01 1011
inputsinputs
outputsoutputs
00
01
10
11
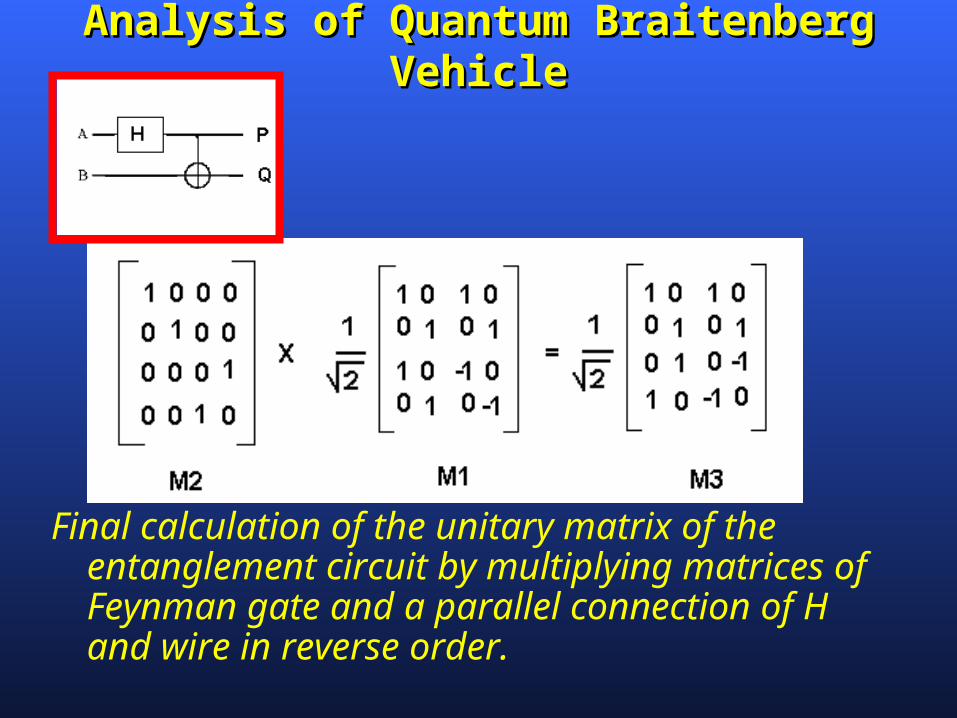
Final calculation of the unitary matrix of the entanglement circuit by multiplying matrices of Feynman gate and a parallel connection of H and wire in reverse order.
Analysis of Quantum Braitenberg VehicleAnalysis of Quantum Braitenberg Vehicle

Calculation of entangled state with no light on both sensors
Analysis of Quantum Braitenberg Vehicle in Analysis of Quantum Braitenberg Vehicle in dark roomdark room
1000
* =
1001
= 1/2 |00> + 1/2 |11>
0 interpreted as no action on motor
Conclusion:Conclusion: in dark room quantum robot can go straight forward or stop, each step after measurement
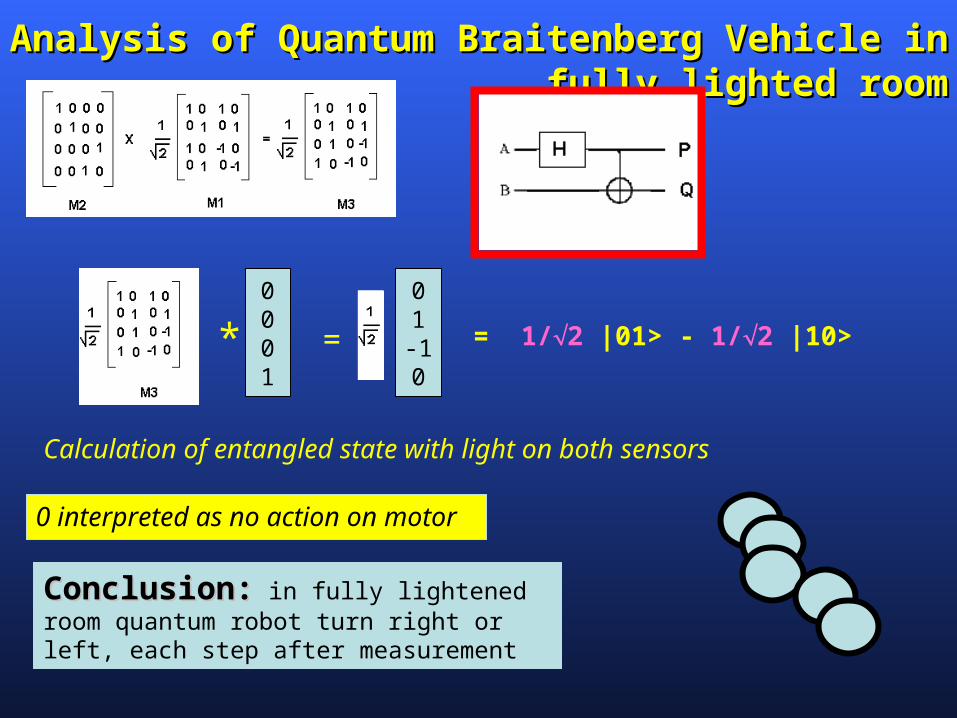
Analysis of Quantum Braitenberg Vehicle in fully Analysis of Quantum Braitenberg Vehicle in fully lighted roomlighted room
0001
* =
01-10
= 1/2 |01> - 1/2 |10>
Calculation of entangled state with light on both sensors
0 interpreted as no action on motor
Conclusion:Conclusion: in fully lightened room quantum robot turn right or left, each step after measurement
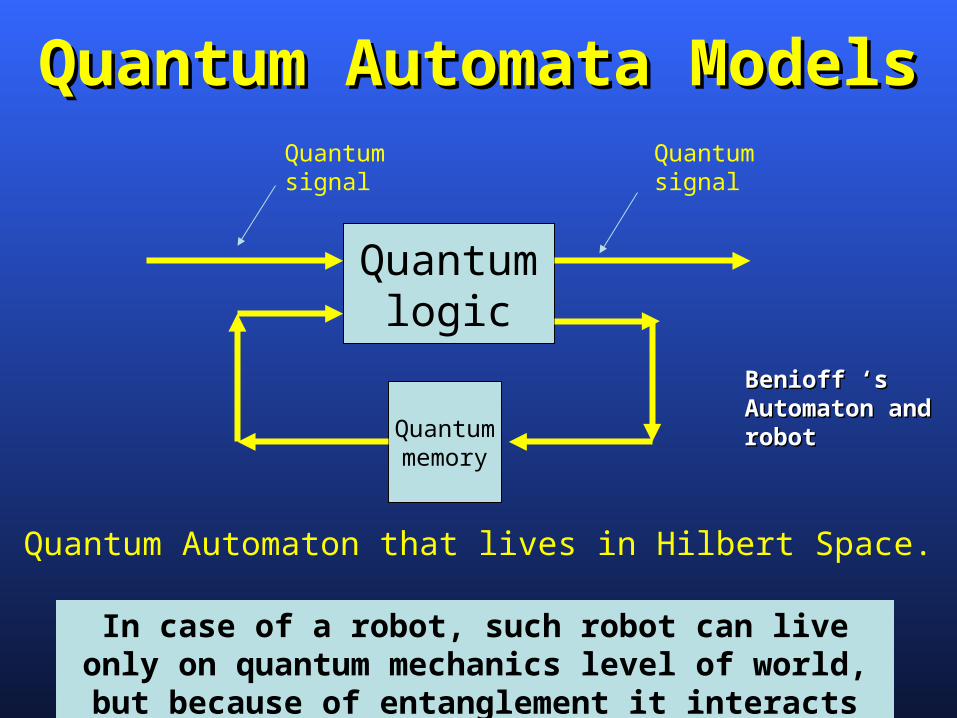
Quantum Automata ModelsQuantum Automata Models
Quantum Automaton that lives in Hilbert Space.
Quantumlogic
Quantummemory
Quantum signal
Quantum signal
In case of a robot, such robot can live only on quantum mechanics level of world, but because of
entanglement it interacts with whole universe.
Benioff ‘s Benioff ‘s Automaton and Automaton and robotrobot
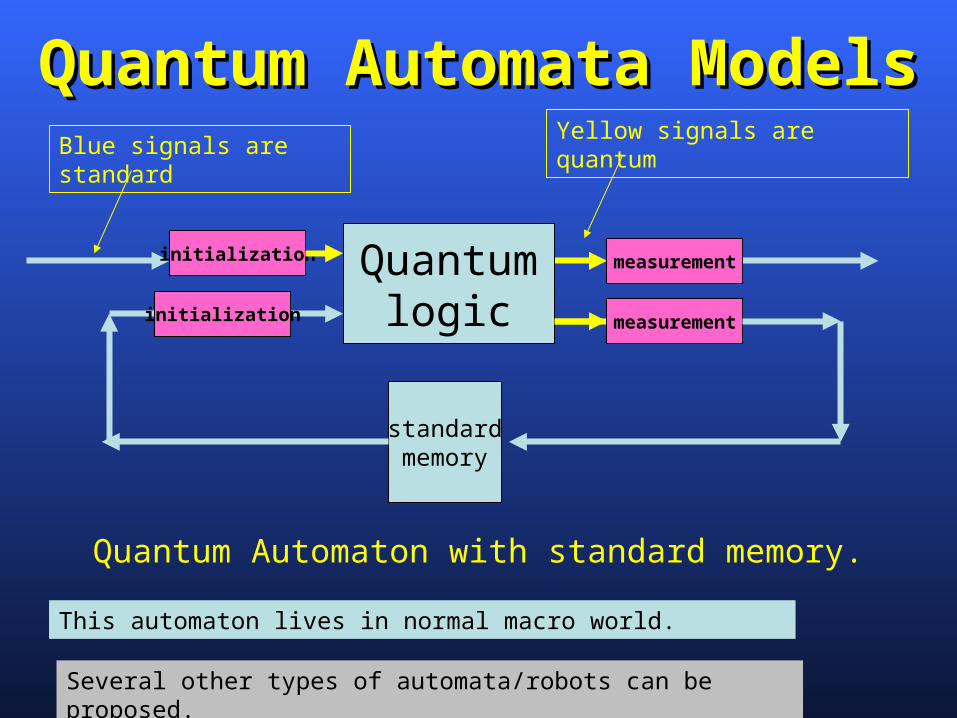
Quantum Automata ModelsQuantum Automata Models
Quantum Automaton with standard memory.
Quantumlogic
standardmemory
measurement
measurement
This automaton lives in normal macro world.
initialization
Yellow signals are quantumBlue signals are standard
Several other types of automata/robots can be proposed.
initialization

Conclusion on Quantum VehiclesConclusion on Quantum Vehicles
• Quantum logic includes binary, multiple-valued and fuzzy logic
• Quantum Automaton includes quantum combinational function, probabilistic and deterministic automaton
• Quantum Braitenberg Vehicle includesincludes (for many reasons) the standard Braitenberg Vehicle.
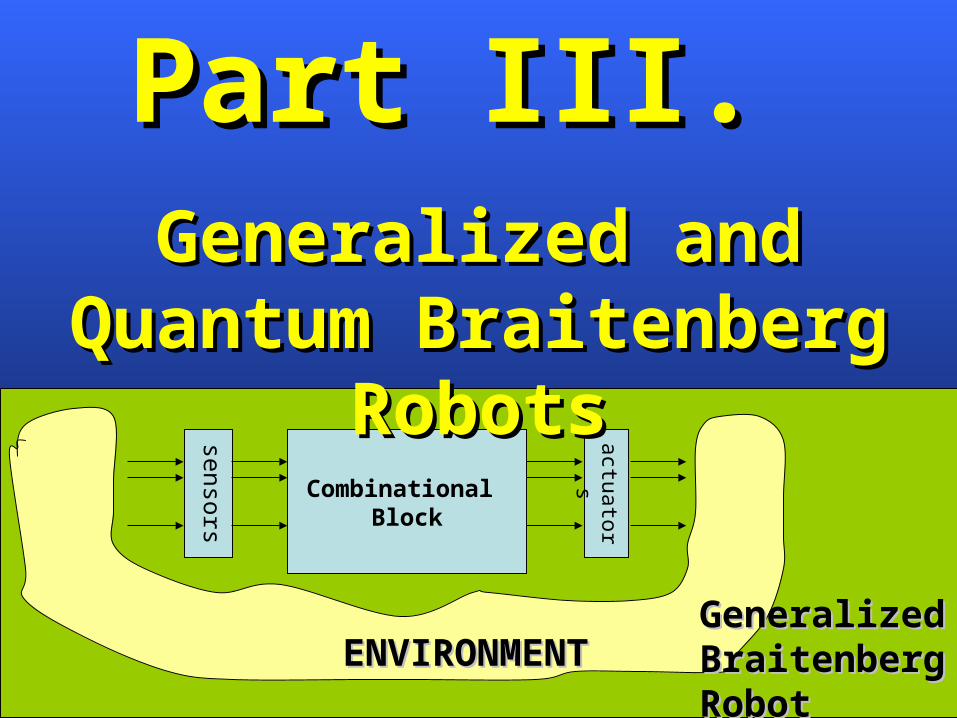
sensors
actuator
sCombinational Block
ENVIRONMENT ENVIRONMENT Generalized Generalized Braitenberg Braitenberg RobotRobot
Part III. Part III. Generalized and Quantum Generalized and Quantum
Braitenberg RobotsBraitenberg Robots

sensors
actuator
sCombinational Block
memory
ENVIRONMENTENVIRONMENT
Braitenberg Braitenberg Automaton RobotAutomaton Robot
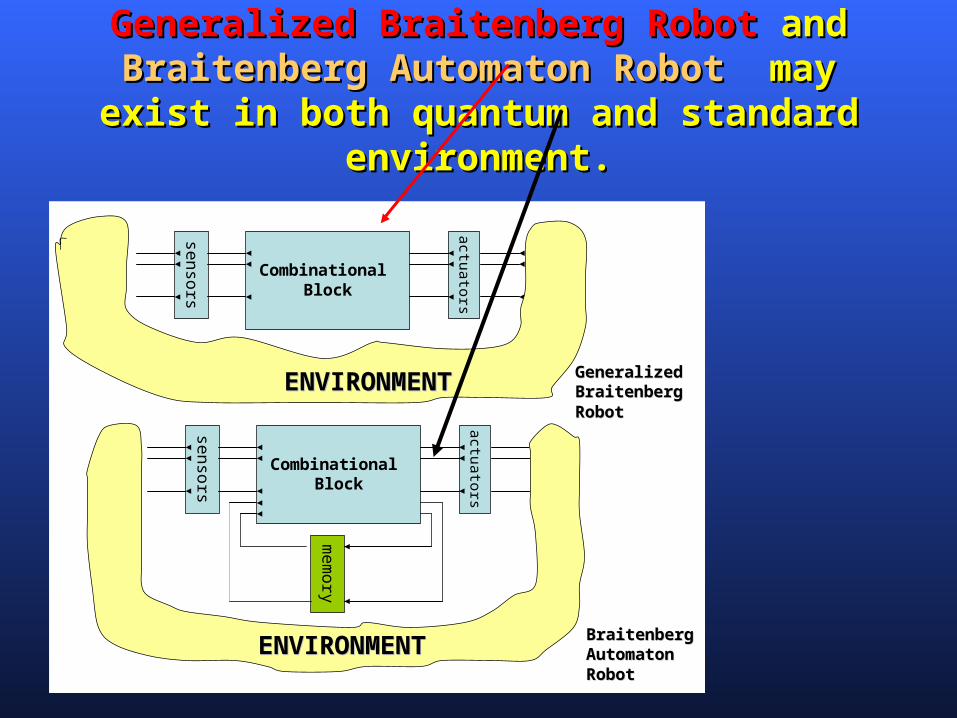
Generalized Braitenberg RobotGeneralized Braitenberg Robot and and Braitenberg Automaton RobotBraitenberg Automaton Robot may exist in may exist in both quantum and standard environment.both quantum and standard environment.
sensors
actuators
Combinational Block
ENVIRONMENT ENVIRONMENT
sensors
actuators
Combinational Block
memory
ENVIRONMENTENVIRONMENT
Generalized Generalized BraitenbergBraitenbergRobotRobot
BraitenbergBraitenbergAutomaton Automaton RobotRobot

A Hybrid Fuzzy-Quantum system of Automata A Hybrid Fuzzy-Quantum system of Automata in Generalized Braitenberg Robot.in Generalized Braitenberg Robot.
sensors
actuators
FuzzyCombinational
Block
QuantumCombinational
BlockQuantum
memory
ENVIRONMENTENVIRONMENT
Fuzzy
Memory
F/Q
Q/F

Quantum Robot Motion Quantum Robot Motion (Behavior) generation(Behavior) generation
Quantum sensing
Standard sensing
QuantumQuantumCounter-like Counter-like automatonautomaton
Quantum ROM
effectors
M M M
Each behavior is a sequence of states
Rough positions in Hilbert Space
Precise deterministic positions probabilistically generated
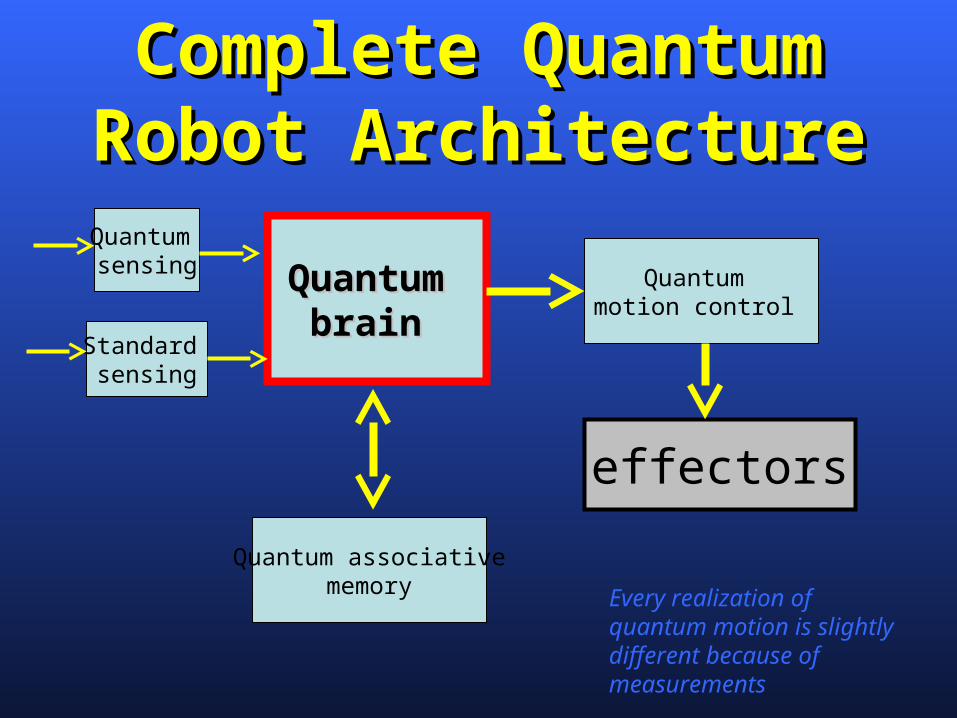
Complete Quantum Robot Complete Quantum Robot ArchitectureArchitecture
Quantum sensing
Standard sensing
Quantum associativememory
Quantum Quantum brain brain
Quantum motion control
effectors
Every realization of quantum motion is slightly different because of measurements
Quantum Braitenberg Vehicles SimulatorQuantum Braitenberg Vehicles Simulator
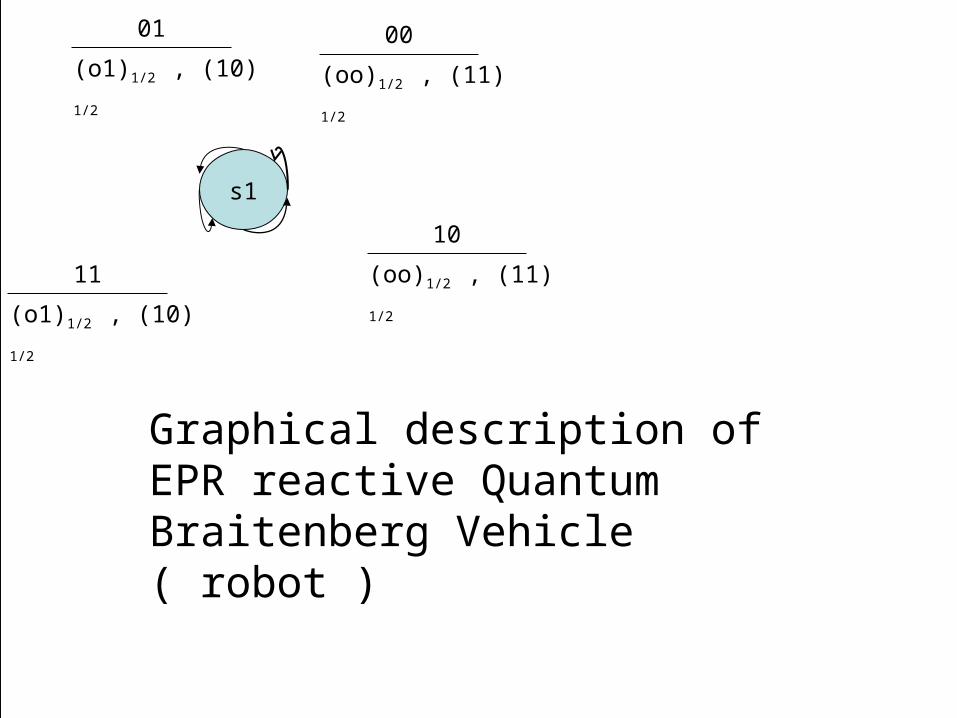
s1
00
(oo)1/2 , (11) 1/2
01
(o1)1/2 , (10) 1/2
11
(o1)1/2 , (10) 1/2
10
(oo)1/2 , (11) 1/2
Graphical description of EPR reactive Quantum Braitenberg Vehicle ( robot )

C
S1
S2 M2
M1Problem 1
Find the unitary matrix and the graph for this Quantum Braitenberg Vehicle
Describe in English its behavior.

0
S1
S2
garbage
garbage
0M1
M2
Problem 2
Find the unitary matrix and the graph for this Quantum Braitenberg Vehicle
Describe in English its behavior.

C2
S1
S2 M2
M1H
C1 garbage
garbage
Problem 3
Find the unitary matrix and the graph for this Quantum Braitenberg Vehicle
Describe in English its behavior.

QuantumCombinational
Block
Feature value
creation and norm
alization
Motion
generationLego camera Light sensors
Lego motors
measurem
ent
Flip-flops
clock
Motion sequence
completed
EnvironmentEnvironment
Touch and other sensors
robot
PROJECT 1.PROJECT 1.
Quantum Automaton Quantum Automaton with standard with standard memory in a setup memory in a setup where the behavior where the behavior of walking Lego of walking Lego robot is observed by robot is observed by Lego CameraLego Camera

The entire system and subsystems for Project 1
• Please observe two feedback loops.
– Small processor (microcontroller on the robot) processes sensor information
– PC processes images
– Camera looks at the robot

ceilingcamera
Laptop PC
Micro -
controller
Radio transmitter
-receiver
Radio transmitter
-receiver
Quantum controller
Selection and generation of motions
Execution of stored motionsTransmission of
motions and sensor readings
Lego camera
Light sensors
Lego motors
EnvironmentEnvironment
Touch and other sensors
robot
PROJECT 1.PROJECT 1.
Components of the entire Components of the entire system. @system. @
The entire system and subsystems for Project 1
• Please observe two feedback loops.
– Small processor (microcontroller on the robot) processes sensor information
– PC processes images
– Human looks at the robot– Camera looks at the human
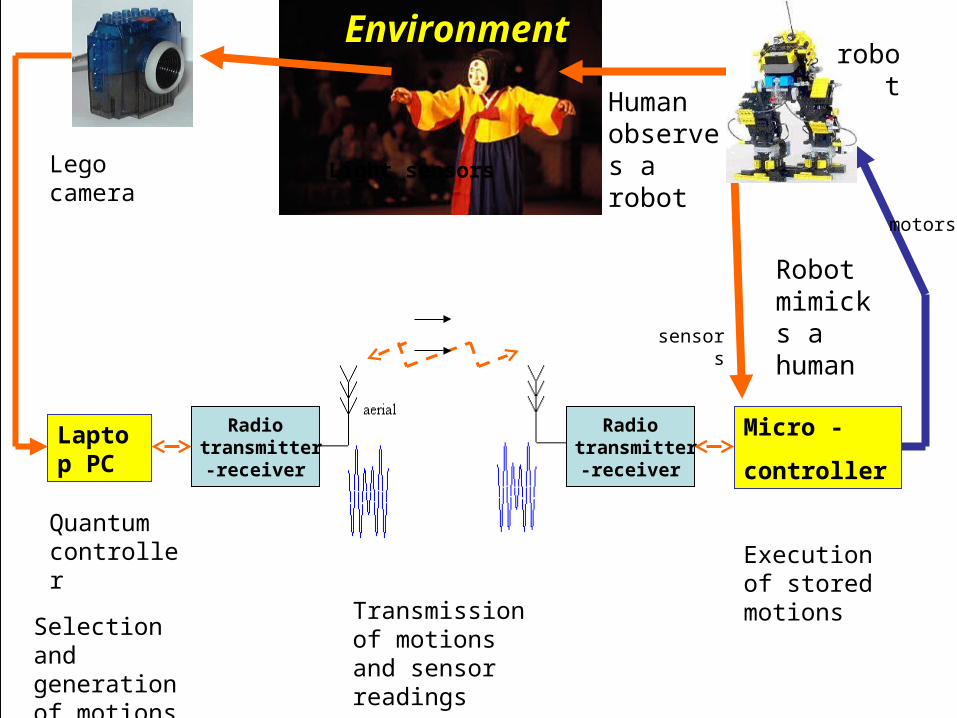
Laptop PC
Micro -
controller
Radio transmitter
-receiver
Radio transmitter
-receiver
Quantum controller
Selection and generation of motions
Execution of stored motionsTransmission of
motions and sensor readings
Human observes a robot
Robot mimicks a human
Lego camera
Light sensors
EnvironmentEnvironmentrobot
sensors
motors

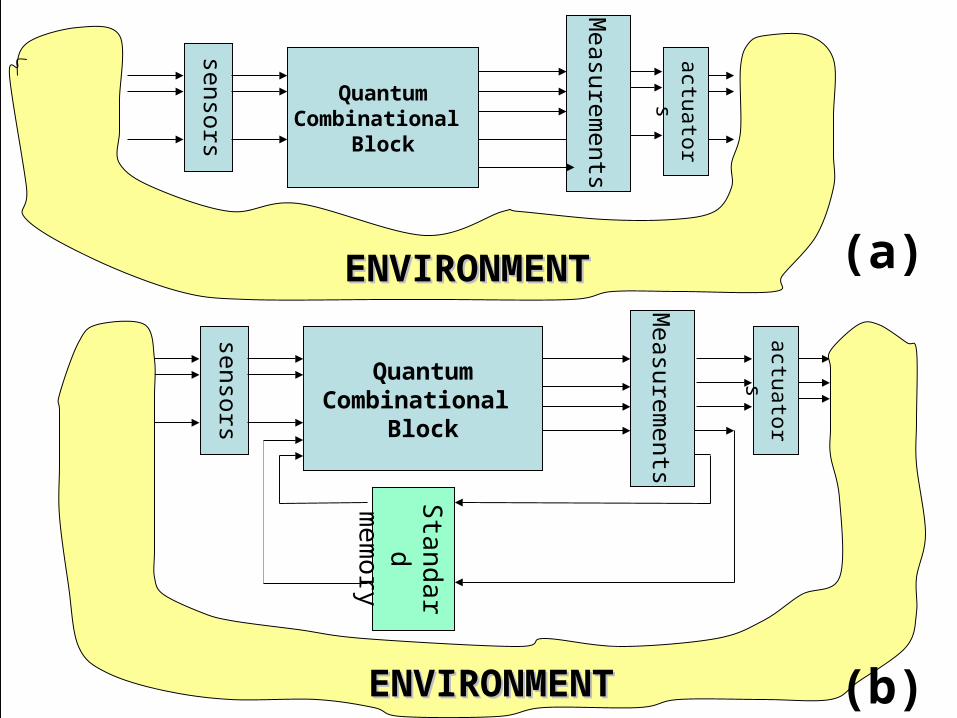
Two Main Simple Quantum Behavioral Architectures
• (a) Reactive architecture (mapping with no memory)
• (b) Behavioral architecture with the memory to represent emotions, moods, knowledge and stored processing information.
sensors
QuantumCombinational
Block
ENVIRONMENT ENVIRONMENT
sensors
QuantumCombinational
Block
Standar
d
memory
ENVIRONMENTENVIRONMENT
actuator
s
Measurements
(a)
(b)
Measurements
actuator
s
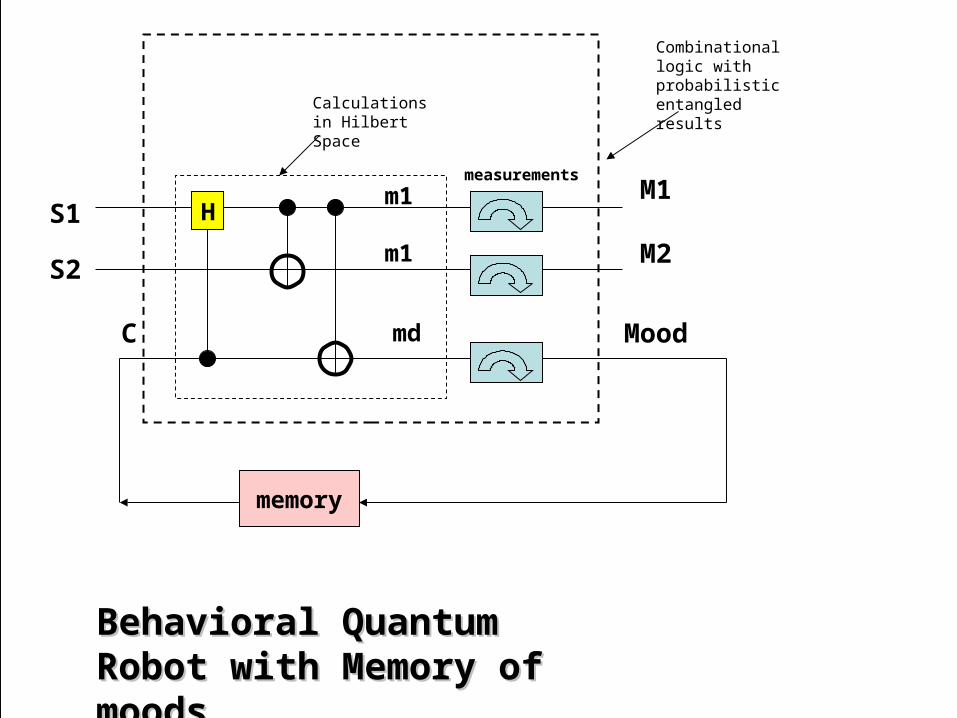
C
S1
S2M2
M1H
Mood
Combinational logic with probabilistic entangled results
memory
m1
m1
md
Calculations in Hilbert Space
measurements
Behavioral Quantum Robot Behavioral Quantum Robot with Memory of moodswith Memory of moods

S1 S2 C M1 M2 Mood
0 0 0 0 0 0 nice
0 0 1
0 1 0 0 1 0
0 1 1
1 0 0 1 1 1 angry
1 0 1
1 1 0 1 0 1
1 1 1
(000)1/2 or (111) 1/2
Problem 4. Complete this table for the Quantum Robot with Memory from the previous slide.
Hybrid ArchitecturesHybrid Architectures
• Modern Behavioral robots are hybrid• They combine various components (agents):
– Reactive– With memory– Fuzzy– Neural– Multi-valued– Learning– Knowledge-based– Quantum – …..
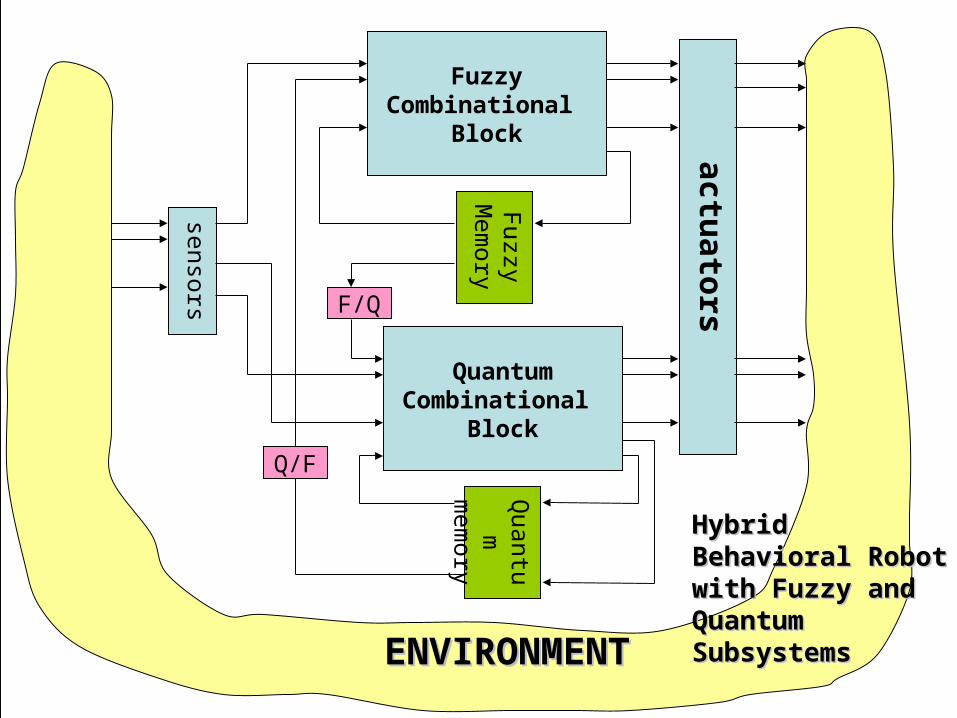
sensors
actuators
FuzzyCombinational
Block
QuantumCombinational
BlockQuantu
m
memory
ENVIRONMENTENVIRONMENT
Fuzzy
Memory
F/Q
Q/F
Hybrid Behavioral Hybrid Behavioral Robot with Fuzzy Robot with Fuzzy and Quantum and Quantum SubsystemsSubsystems

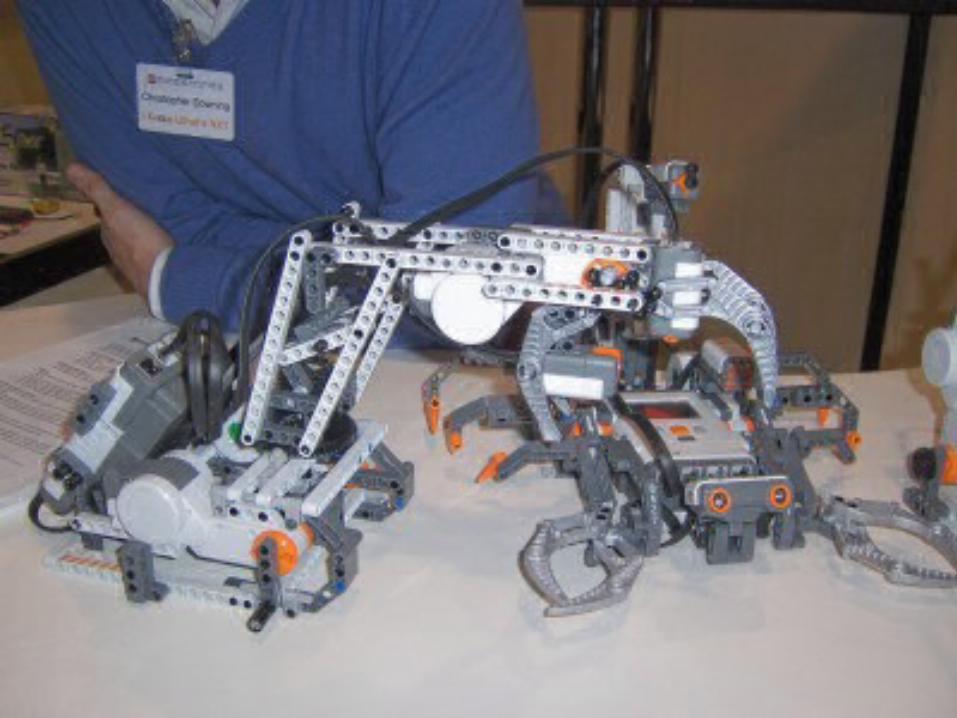
You can find many good Lego You can find many good Lego designs on Internetdesigns on Internet
New Lego New Lego KitsKits
Mindstorms NXTMindstorms NXT• It has a 32-bit processor,
• proper servo motors,
• new sensors (including color vision and hearing)
• bluetooth connectivity
• it can be controlled by a cellphone

• powered by LabVIEW from National Instruments.
when I got the Space Monorail, I thought it was the absolute height of coolness that Lego could hope to attain. Now Lego kits have Bluetooth and their own programming language, LegOS.
• The inclusion of Bluetooth technology also extends possibilities for controlling robots remotely, for example, from a mobile phone or PDA.

Projects Projects with new with new
LegoLego
• when I got the Space Monorail, I thought it was the absolute height of coolness that Lego could hope to attain. Now Lego kits have Bluetooth and their own programming language, LegOS.






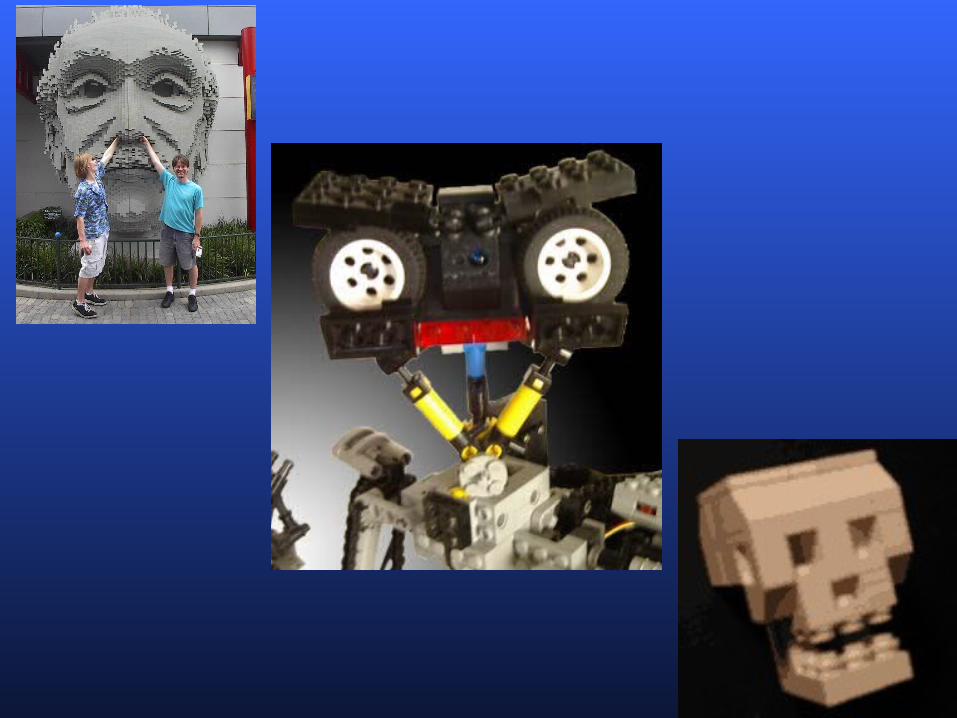
Lego Lego HeadsHeads





Lego Lego BipedsBipeds





Lego robot biped googleLego robot biped google

Lego Lego HandsHands


Homework 2• Design a simulator of two Braitenberg Vehicle in
an environment
• The environment may be an arbitrary maze, sports field or battlefield. It can be a plan of a house.
• The robots can turn right 90 degree, left 90 degree and rotate. They can move one step forward or one step backwards. These are the all basic moves from which other moves are composed.
Homework 2 cont• Each vehicle has a minimum of two sensors. You design and locate
the servos. They can see no more than 3 cells from the robot cell in any direction.
• Each robot may have weapons that shoot one cell in any direction.• There may be a ball or other item for play and interaction.• The vehicles can have some friendly or unfriendly relation, to be
defined by you.• The environment (space) for robots is a square with external walls
North, East, West and South. If one robot escapes to one of these external walls then the robot is safe from shooting but he cannot shoot.
• The space is a grid of cells. The walls are marked by number X. The empty cells are empty. All other symbols may be used to denote the position, orientation and internal state of each robot.
• Your program should either make printouts or display the snapshots of robot behavior with written explanation what happens (possibly what are their internal states), collisions, intentions, etc.
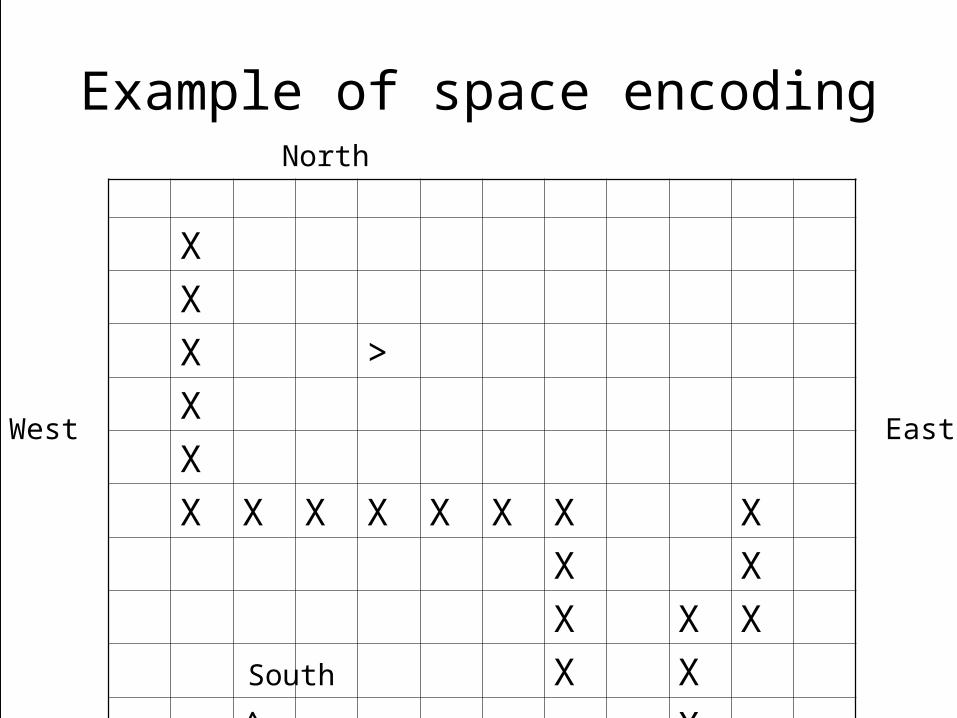
Example of space encoding
X
X
X >
X
X
X X X X X X X X
X X
X X X
X X
^ X
X X
North
South
West East
Examples of programming of simple standard Braitenberg
Vehicles in JavaWe used Basic, LISP, Pascal, C, Robot C, etc

MotorTest.javaimport josx.platform.rcx.*;
class MotorTest {
static final int STOP = 0;static final int RUN = 1;static final int FLOAT = 2;
static int mode = STOP;static int power = 0;
public static void main(String [] args) {
setupButtonListeners();
while (true) {if (mode == RUN) {
Motor.A.setPower( power ); // power in range [0, 7]. incremented with each press of View button.
Motor.A.forward();} else if (mode == STOP) {
Motor.A.stop();} else if (mode == FLOAT) {
Motor.A.flt();}
}}
... (button listener code not shown)

LightTest.javaimport josx.platform.rcx.*;
class LightTest implements SensorConstants {
public static void main(String [] args) throws InterruptedException{
Sensor.S1.setTypeAndMode (SENSOR_TYPE_LIGHT, SENSOR_MODE_PCT);
Sensor.S1.activate();
while (true) {int lightReading;
if (Button.VIEW.isPressed()) {lightReading = Sensor.S1.readRawValue();
} else {lightReading = Sensor.S1.readValue();
}
LCD.showNumber( lightReading );}
}
}

Complete Example: Complete Example: “Aggressive.java”“Aggressive.java”
import josx.platform.rcx.*;
class aggressive implements SensorConstants {
public static void main(String [] args) {
int minBrightness = 100;final int gain = 12;
Sensor.S1.setTypeAndMode (SENSOR_TYPE_LIGHT, SENSOR_MODE_PCT);Sensor.S1.activate();Sensor.S3.setTypeAndMode (SENSOR_TYPE_LIGHT, SENSOR_MODE_PCT);Sensor.S3.activate();
for (int i = 0; i < 100; i++) {if (Sensor.S1.readValue() < minBrightness) {
minBrightness = Sensor.S1.readValue();} else if (Sensor.S3.readValue() < minBrightness) {
minBrightness = Sensor.S3.readValue();}Thread.sleep(20);
}
Motor.A.forward();Motor.C.forward();
while (true) {int motorASpeed = (Sensor.S3.readValue() - minBrightness) / gain;int motorCSpeed = (Sensor.S1.readValue() - minBrightness) / gain;
setMotorSpeed(Motor.A, motorASpeed);setMotorSpeed(Motor.C, motorCSpeed);
}}

Aggressive.java (continued)protected static void setMotorSpeed(Motor m, int motorSpeed){
if (motorSpeed < 1) {m.flt(); // importantLCD.showNumber(-1);
} else {if (motorSpeed > 7) {
motorSpeed = 7;}m.forward();m.setPower(motorSpeed);LCD.showNumber(motorSpeed);
}
}
}
Observations
Closed loop control; lessens importance of mechanical imperfections (e.g. pulley slip).
The map is not the territory.
Make your own—robots and observations!
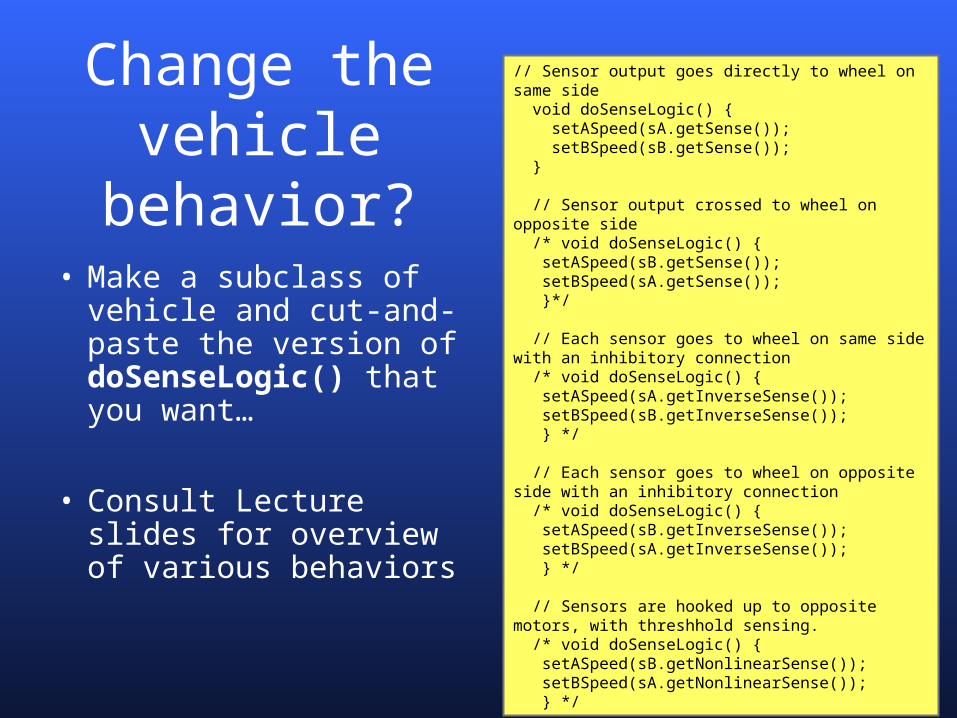
Change the vehicle
behavior?• Make a subclass of
vehicle and cut-and-paste the version of doSenseLogic() that you want…
• Consult Lecture slides for overview of various behaviors
// Sensor output goes directly to wheel on same side void doSenseLogic() { setASpeed(sA.getSense()); setBSpeed(sB.getSense()); }
// Sensor output crossed to wheel on opposite side /* void doSenseLogic() { setASpeed(sB.getSense()); setBSpeed(sA.getSense()); }*/
// Each sensor goes to wheel on same side with an inhibitory connection /* void doSenseLogic() { setASpeed(sA.getInverseSense()); setBSpeed(sB.getInverseSense()); } */
// Each sensor goes to wheel on opposite side with an inhibitory connection /* void doSenseLogic() { setASpeed(sB.getInverseSense()); setBSpeed(sA.getInverseSense()); } */
// Sensors are hooked up to opposite motors, with threshhold sensing. /* void doSenseLogic() { setASpeed(sB.getNonlinearSense()); setBSpeed(sA.getNonlinearSense()); } */











![Análisis del comportamiento de robots móviles autónomos en ...vehículos de Braitenberg [5], quien diseña una serie de vehículos los cuales mediante una serie de conexiones excitadoras](https://static.fdocuments.net/doc/165x107/5e9fcfa4f184c061f42b19a4/anlisis-del-comportamiento-de-robots-mviles-autnomos-en-vehculos-de.jpg)






