Beee Unit III

of 20
-
Upload
deependra-v-singh -
Category
Documents
-
view
46 -
download
0
description
BEEE Unit III Notes
Transcript of Beee Unit III
-
Basic Electrical & Electronics Engineering
Prepared By: Deependra Singh 1
Unit III ROTATING ELECTRIC MACHINES CONSTRUCTIONAL DETAILS OF DC MACHINE
As pointed out earlier, D.C machines were first developed and used extensively in spite of its
complexities in the construction. The generated voltage in a coil when rotated relative to a magnetic
field is alternating in nature. To convert this A.C. voltage into a D.C. voltage we therefore need a
unit after the coil terminals. This unit comprises of a number of commutator segments attached to the
shaft of the rotor and a pair of suitably placed stationary carbon brushes touching the commutator
segments. Commutator segments together with the fixed brushes do the necessary rectification from
A.C. to D.C. and hence sometimes called mechanical rectifier.
A D.C. machine is an electro-mechanical energy conversion device. When it converts mechanical power into D.C. electrical power, it is known as a D.C. generator. On the other hand, when it converts D.C. electrical power into mechanical power it is known as a D.C. motor.
The complete assembly of various parts in a scattered form of D.C. machine is shown.
The essential parts of a D.C. machine are described below:
1. Magnetic Frame or Yoke: The outer cylindrical frame
to which main poles and inter-poles are fixed to the foundation is called the yoke. It serves two purposes: a) It provides mechanical protection to the inner parts of
the machine. b) It provides a low reluctance path for the magnetic flux.
-
Basic Electrical & Electronics Engineering
Prepared By: Deependra Singh 2
2. Pole-Core and Pole Shoes: The pole core and pole shoes are fixed to the magnetic frame
or yoke by bolts. They serve the following purposes: a) They support the field or exciting coils. b) They spread out the magnetic flux over the armature periphery more uniformly. c) Since pole shoes have larger cross-section, the reluctance of magnetic path is reduced. Usually, the pole core and pole shoes are made of thin cast steel or wrought iron laminations which are riveted together under hydraulic pressure as shown in figure (b).
3. Field or Exciting Coils: Enameled copper wire is used for the construction of field or
exciting coils. The coils are wound on the former [figure (c)] and then placed around the pole core. When direct current is passed through the field winding, it magnetizes the poles which produce the required flux. The field coils of all the poles are connected in series in such a way that when current flows through them, the adjacent poles attain opposite polarity as shown in figure (d).
4. Armature Core: It is cylindrical in shape and keyed to the rotating shaft. At the outer
periphery slots are cut as shown in fig., which accommodate the armature winding. The armature core serves the following purposes: a) It houses the conductors in the slots. b) It provides an easy path for magnetic flux.
Since armature is a rotating part of the machine, reversal of flux takes place in the core, hence hysteresis losses are produced. To minimize these losses silicon steel material is used for its construction. The rotating armature cuts across the magnetic field which induces an e.m.f. in it. The e.m.f. circulates eddy currents which results in eddy current loss in it. To reduce these losses, armature core is laminated, in other words we can say that about 0.3 to 0.5 mm thick stampings are used for its construction. Each lamination or stamping is insulated from the other by varnish layer.
5. Armature winding: The insulated conductors housed in the armature slots are suitably
connected. This is known as armature winding. The armature winding is the heart of D.C. machine. It is a place where conversion of power takes place i.e. in case of generator, mechanical power is converted into electrical power and in case of motor, electrical power is converted into mechanical power. On the basis of connections, there are two types of armature windings named as (i) Lap Winding and (ii) Wave Winding. a) Lap Winding: In lap winding, conductors are connected in such a way that number of
parallel paths is equal to the number of poles. Thus, if machine has P poles and Z
-
Basic Electrical & Electronics Engineering
Prepared By: Deependra Singh 3
armature conductors, then there will be P parallel paths; each path will have Z/P conductors in series. In this case, the number of brushes is equal to the number of parallel paths. Out of which half the brushes are positive and remaining half are negative
b) Wave Winding: In wave winding, the conductors are so connected that they are divided into two parallel paths irrespective of the number of poles of the machine. Thus, if machine has Z armature conductors, there will be only two parallel paths each having Z/2 conductors in series. In this case, the number of brushes is equal to two i.e. number of parallel paths.
6. Commutator: It is the most important part of a D.C. machine and serves the following
purposes: a) It connects the rotating armature conductors to the stationary external circuit through
brushes. b) It converts the alternating current induced in the armature conductors into unidirectional
current in the external load circuit in generator action, whereas, it converts the alternating torque into unidirectional (continuous) torque produced in the armature in motor action. The commutator is of cylindrical shape and is made up of wedge shaped hard drawn copper segments. The segments are insulated from each other by a thin sheet of mica. The segments are held together by means of two wedge shaped rings that fit into the V-grooves cut into the segments. Each armature coil is connected through riser. The sectional view of the commutator is shown.
7. Brushes: The brushes are pressed upon the commutator and form the connecting link between the armature winding and the external circuit. They are usually made of high grade carbon because carbon is conducting material and at the same time in powdered form provides lubricating effect on the commutator surface. The brushes are held in particular position around the commutator by brush holders.
8. End Housings: End housings are attached to the ends of the main frame and support
bearings. The front housing supports the bearing and the brush assemblies whereas the rear housing usually supports the bearing only.
9. Bearings: The ball or roller bearings are fitted in the end housings. The function of the
bearings is to reduce friction between the rotating and stationary parts of the machine. Mostly high carbon steel is used for the construction of bearings as it is very hard material.
10. Shaft: The shaft is made of mild steel with a maximum breaking strength. The shaft is used
to transfer mechanical power from or to the machine. The rotating parts like armature core, commutator, cooling fans etc. are keyed to the shaft.
-
Basic Electrical & Electronics Engineering
Prepared By: Deependra Singh 4
CONSTRUCTIONAL DETAILS INDUCTION MACHINE
THREE-PHASE AC INDUCTION SQUIRREL CAGE MOTOR
For industrial and mining applications, 3-phase AC induction motors are the prime movers
for the vast majority of machines. These motors can be operated either directly from the mains or
from adjustable variable frequency drives. In modern industrialized countries, more than half the
total electrical energy used in those countries is converted to mechanical energy through AC
induction motors. The applications for these motors cover almost every stage of manufacturing and
processing.
Applications also extend to commercial buildings and the domestic environment. They are
used to drive pumps, fans, compressors, mixers, agitators, mills, conveyors, crushers, machine tools,
cranes, etc, etc.
It is not surprising to find that this type of electric motor is so popular, when one considers its
simplicity, reliability and low cost. In the last decade, it has become increasingly common practice to
use 3-phase squirrel cage AC induction motors with variable voltage variable frequency (VVVF)
converters for variable speed drive (VSD) applications. To clearly understand how the VSD system
works, it is necessary to understand the principles of operation of this type of motor. Although the
basic design of induction motors has not changed very much in the last 50 years, modern insulation
materials, computer based design optimization techniques and automated manufacturing methods
have resulted in motors of smaller physical size and lower cost per kW. International standardization
of physical dimensions and frame sizes means that motors from most manufacturers are physically
interchangeable and they have similar performance characteristics.
The reliability of squirrel cage AC induction motors, compared to DC motors, is high. The
only parts of the squirrel cage motor that can wear are the bearings. Slip rings and brushes are not
required for this type of construction. Improvements in modern pre-lubricated bearing design have
extended the life of these motors. Although single-phase AC induction motors are quite popular and
-
Basic Electrical & Electronics Engineering
Prepared By: Deependra Singh 5
common for low power applications up to approx 2.2 kW, these are seldom used in industrial and
mining applications. Single-phase motors are more often used for domestic applications.
The information in this chapter applies mainly to 3-phase squirrel cage AC induction motors,
which is the type most commonly used with VVVF converters.
BASIC CONSTRUCTION The AC induction motor comprises 2 electromagnetic parts:
Stationary part called the stator
Rotating part called the rotor, supported at each end on bearings
The stator and the rotor are each made up of:
An electric circuit, usually made of insulated copper or aluminum, to carry current
A magnetic circuit, usually made from laminated steel, to carry magnetic flux
THE STATOR: The stator is the outer stationary part of the motor, which consists of:
The outer cylindrical frame of the motor, which is made either of welded sheet steel, cast iron
or cast aluminum alloy. This may include feet or a flange for mounting.
The magnetic path, which comprises a set of slotted steel laminations pressed into the
cylindrical space inside the outer frame. The magnetic path is laminated to reduce eddy currents,
lower losses and lower heating.
A set of insulated electrical windings, which are placed inside the slots of laminated magnetic
path. The cross-sectional area of these windings must be large enough for the power rating of the
motor. For a 3-phase motor, 3 sets of windings are required, one for each phase.
Stator and rotor laminations
THE ROTOR: This is the rotating part of the motor. As with the stator above, the rotor consists of a
set of slotted steel laminations pressed together in the form of a cylindrical magnetic path and the
electrical circuit. The electrical circuit of the rotor can be either:
-
Basic Electrical & Electronics Engineering
Prepared By: Deependra Singh 6
WOUND ROTOR TYPE, which comprises 3 sets of insulated windings with connections
brought out to 3 slip-rings mounted on the shaft. The external connections to the rotating part
are made via brushes onto the slip rings. Consequently, this type of motor is often referred to
as a slip ring motor.
SQUIRREL CAGE ROTOR TYPE, which comprises a set of copper or aluminum bars
installed into the slots, which are connected to an end-ring at each end of the rotor. The
construction of these rotor windings resembles a squirrel cage. Aluminum rotor bars are
usually die-cast into the rotor slots, which results in a very rugged construction. Even though
the aluminum rotor bars are in direct contact with the steel laminations, practically all the
rotor current flows through the aluminum bars and not in the laminations.
THE OTHER PARTS
The other parts, which are required to complete the induction motor, are:
Two end-flanges to support the two bearings, one at the drive-end (DE) and the other at the
non drive-end (NDE)
Two bearings to support the rotating shaft, at DE and NDE
Steel shaft for transmitting the torque to the load
Cooling fan located at the NDE to provide forced cooling for the stator and rotor
Terminal box on top or either side to receive the external electrical connections
Assembly details of a typical AC induction motor
-
Basic Electrical & Electronics Engineering
Prepared By: Deependra Singh 7
CONSTRUCTIONAL DETAILS SYNCHRONOUS MACHINE
This chapter includes a description of the design criteria leading to the construction of a
modern turbo-generator, as well as contains a detailed description of all components most commonly
found in such a machine. This section is limited to the presentation of the basic components
comprising a synchronous machine, with the purpose of describing its basic operating theory.
Synchronous machines come in all sizes and shapes, from the miniature permanent magnet
synchronous motor in wall-clocks, to the largest steam-turbine-driven generators of up to about 1500
MVA. Synchronous machines are one of two types: the stationary field or the rotating dc magnetic
field. The stationary field synchronous machine has salient poles mounted on the stator the
stationary member. The poles are magnetized either by permanent magnets or by a dc current. The
armature, normally containing a three-phase winding, is mounted on the shaft. The armature winding
is fed through three slip rings (collectors) and a set of brushes sliding on them. This arrangement can
be found in machines up to about 5 kVA in rating. For larger machines all those covered in this
book the typical arrangement used is the rotating magnetic field.
The rotating magnetic field (also known as revolving-field) synchronous machine has the
field-winding wound on the rotating member (the rotor), and the armature wound on the stationary
member (the stator). A dc current, creating a magnetic field that must be rotated at synchronous
speed, energizes the rotating field-winding. The rotating field winding can be energized through a set
of slip rings and brushes (external excitation), or from a diode-bridge mounted on the rotor (self-
excited). The rectifier-bridge is fed from a shaft-mounted alternator, which is itself excited by the
pilot exciter. In externally fed fields, the source can be a shaft-driven dc generator, a separately
excited dc generator, or a solid-state rectifier. Several variations to these arrangements exist.
The stator core is made of insulated steel laminations. The thickness of the laminations and the type
of steel are chosen to minimize eddy current and hysteresis losses, while maintaining required
effective core length and minimizing costs. The core is mounted directly onto the frame or (in large
two-pole machines) through spring bars. The core is slotted (normally open slots), and the coils
making the winding are placed in the slots. There are several types of armature windings, such as
concentric windings of several types, cranked coils, split windings of various types, wave windings,
and lap windings of various types. Modern large machines typically are wound with double-layer lap
windings.
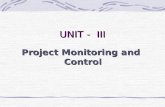
The rotor field is either of salient-pole (Fig. 1.19) or non-salient-pole construction, also
known as round rotor or cylindrical rotor (Fig. 1.20). Non-salient-pole (cylindrical) rotors are utilized
in two- or four-pole machines, and, very seldom, in six-pole machines. These are typically driven by
steam or combustion turbines. The vast majority of salient-pole machines have six or more poles.
They include all synchronous hydro-generators, almost every synchronous condenser, and the
-
Basic Electrical & Electronics Engineering
Prepared By: Deependra Singh 8
overwhelming majority of synchronous motors. Non-salient-pole rotors are typically machined out of
a solid steel forging. The winding is placed in slots machined out of the rotor body and retained
against the large centrifugal forces by metallic wedges, normally made of aluminum or steel. The
retaining rings restrain the end part of the windings (end-windings). In the case of large machines,
the retaining rings are made out of steel. Large salient-pole rotors are made of laminated poles
retaining the winding under the pole head. The poles are keyed onto the shaft or spider-and-wheel
structure. Salient-pole machines have an additional winding in the rotating member. This winding,
made of copper bars short-circuited at both ends, is embedded in the head of the pole, close to the
face of the pole. The purpose of this winding is to start the motor or condenser under its own power
as an induction motor, and take it unloaded to almost synchronous speed, when the rotor is pulled
in by the synchronous torque. The winding also serves to damp the oscillations of the rotor around
the synchronous speed, and is therefore named the damping-winding (also known as amortisseurs or
damper-windings).
Fig. 1.19: Synchronous machine construction. Schematic cross section of a salient-pole synchronous machine. In a large generator, the rotor is magnetized by a coil wrapped around it. The figure shows a two-pole rotor. Salient-pole rotors normally have many more than two poles. When designed as a generator, large salient-pole machines are driven by water turbines. The bottom part of the figure shows the three-phase voltages obtained at the terminals of the generator, and the equation relates the speed
of the machine, its number of poles, and the frequency of the resulting voltage.
-
Basic Electrical & Electronics Engineering
Prepared By: Deependra Singh 9
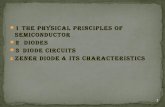
Fig. 1.20: Schematic cross section of a synchronous machine with a cylindrical round-rotor
(turbogenerator). This is the typical design for all large turbogenerators. Here both the stator and rotor windings are installed in slots, distributed around the periphery of the machine. The lower part shows the resulting waveforms of a pair of conductors, and that of a distributed winding. The formula giving the magneto-motive force (mmf) created by the windings.
WORKING PRINCIPLE OF 3-PHASE INDUCTION MOTOR
The balanced three-phase winding of the stator is supplied with a balanced three-phase
voltage. The current in the stator winding produces a rotating magnetic field, the magnitude of which
remains constant. The axis of the magnetic field rotates at a synchronous speed (ns = 2f/p), a function
of the supply frequency (f), and number of poles (p) in the stator winding. The magnetic flux lines in
the air gap cut both stator and rotor (being stationary, as the motor speed is zero) conductors at the
same speed. The e.m.f. in both stator and rotor conductors are induced at the same frequency, i.e. line
or supply frequency, with No. of poles for both stator and rotor windings (assuming wound one)
being same. The stator conductors are always stationary, with the frequency in the stator winding
being same as line frequency. As the rotor winding is short-circuited at the slip-rings, current flows
in the rotor windings. The electromagnetic torque in the motor is in the same direction as that of the
rotating magnetic field, due to the interaction between the rotating flux produced in the air gap by the
current in the stator winding, and the current in the rotor winding. This is as per Lenzs law, as the
developed torque is in such direction that it will oppose the cause, which results in the current
flowing in the rotor winding. This is irrespective of the rotor type used cage or wound one, with
-
Basic Electrical & Electronics Engineering
Prepared By: Deependra Singh 10
the cage rotor, with the bars short-circuited by two end-rings, is considered equivalent to a wound
one The current in the rotor bars interacts with the air-gap flux to develop the torque, irrespective of
the no. of poles for which the winding in the stator is designed. Thus, the cage rotor may be termed
as universal one. The induced emf and the current in the rotor are due to the relative velocity
between the rotor conductors and the rotating flux in the air-gap, which is maximum, when the rotor
is stationary (nr = 0). As the rotor starts rotating in the same direction, as that of the rotating
magnetic field due to production of the torque as stated earlier, the relative velocity decreases, along
with lower values of induced emf and current in the rotor. If the rotor speed is equal that of the
rotating magnetic field, which is termed as synchronous speed, and also in the same direction, the
relative velocity is zero, which causes both the induced emf and current in the rotor to be reduced to
zero. Under this condition, torque will not be produced. So, for production of positive (motoring)
torque, the rotor speed must always be lower than the synchronous speed. The rotor speed is never
equal to the synchronous speed in an IM. The rotor speed is determined by the mechanical load on
the shaft and the total rotor losses, mainly comprising of copper loss.
The difference between the synchronous speed and rotor speed, expressed as a ratio of the
synchronous speed, is termed as slip in an IM. So, slip (s) in pu is
s
r
s
rs
n
n
n
nns
1 or, sr nsn 1
Where, ns and nr are synchronous and rotor speeds in rev/s.
In terms of ss nN 60 and rr nN 60 , both in rev/min (rpm), slip is
s
rs
N
NNs
If the slip is expressed in %, then 100/ srs NNNs
Normally, for torques varying from no-load ( zero) to full load value, the slip is proportional
to torque. The slip at full load is 4-5% (0.04-0.05).
-
Basic Electrical & Electronics Engineering
Prepared By: Deependra Singh 11
ALTERNATE METHOD:
An alternative explanation for the production of torque in a three-phase induction motor is
given here, using two rules (right hand and left hand) of Fleming. The stator and rotor, along with
air-gap, is shown in Fig. 30.4a. Both stator and rotor is shown there as surfaces. Also shown is the
path of the flux in the air gap. This is for a section, which is under North Pole, as the flux lines move
from stator to rotor. The rotor conductor shown in the figure is at rest, i.e., zero speed (standstill).
The rotating magnetic field moves past the conductor at synchronous speed in the clockwise
direction. Thus, there is relative movement between the flux and the rotor conductor. Now, if the
magnetic field, which is rotating, is assumed to be at standstill as shown in Fig. 30.4b, the conductor
will move in the direction shown. So, an emf is induced in the rotor conductor as per Faradays law,
due to change in flux linkage. The direction of the induced emf as shown in the figure can be
determined using Flemings right hand rule.
The rotor bars in the cage rotor are short circuited via end rings. Similarly, in the wound
rotor, the rotor windings are normally short-circuited externally via the slip rings. In both cases, as
emf is induced in the rotor conductor (bar), current flows there, as it is short circuited. The flux in the
air gap, due to the current in the rotor conductor is shown in Fig. 30.4c. The flux pattern in the air
gap, due to the magnetic fields produced by the stator windings and the current carrying rotor
conductor, is shown in Fig. 304d. The flux lines bend as shown there. The property of the flux lines
is to travel via shortest path as shown in Fig. 30.4a. If the flux lines try to move to form straight line,
then the rotor conductor has to move in the direction of the rotating magnetic field, but not at the
-
Basic Electrical & Electronics Engineering
Prepared By: Deependra Singh 12
same speed, as explained earlier. The current carrying rotor conductor and the direction of flux are
shown in Fig. 30.4e. It is known that force is produced on the conductor carrying current, when it is
placed in a magnetic field. The direction of the force on the rotor conductor is obtained by using
Flemings left hand rule, being same as that of the rotating magnetic field. Thus, the rotor
experiences a motoring torque in the same direction as that of the rotating magnetic field. This
briefly describes how torque is produced in a three-phase induction motor.
THE FREQUENCY OF THE INDUCED EMF AND CURRENT IN THE ROTOR
As given earlier, both the induced emf and the current in the rotor are due to the relative
velocity between the rotor conductors and the rotating flux in the air-gap, the speed of which is the
synchronous speed (Ns = 2f/p). The rotor speed is
Nr = (1-s) Ns
The frequency of the induced emf and current in the rotor is
fsnpsnnpf srsr .)..().(
For normal values of slip, the above frequency is small.
Taking an example, with full load slip as 4% (0.04), and supply (line) frequency as 50 Hz, the
frequency (Hz) of the rotor induced emf and current, fr is 0.0450.0 = 2.0, which is very small,
whereas the frequency (f) of the stator induced emf and current is 50 Hz, i.e. line frequency. At
standstill, i.e. rotor stationary (nr = 0.0), the rotor frequency is same as line frequency, as shown
earlier, with slip [s = 1.0 (100%)].
-
Basic Electrical & Electronics Engineering
Prepared By: Deependra Singh 13
EMF EQUATION OF 3-PHASE INDUCTION MOTOR An emf is induced in rotor by the rotating magnetic field produced by the stator ampere-turns.
This induced emf depends upon the magnitude of the rotating flux and the speed at which this flux
cuts the rotor conductors.
Consider the following two points:
(i) When the rotor is at standstill, the stator flux cuts the rotor conductors at a speed NS
and an emf, E20 is induced.
(ii) When the rotor is rotating at speed Nr, the rotating field cuts the rotor conductors at a
speed (NS - Nr) r.p.m. Let the induced emf in the rotor be E2.
Now, sN
NN
S
rS
So SrS NsNN .
As the emf induced at speed NS is E20 so the emf induced at speed s.Ns will be s.E20.
Therefore, 202 .EsE (i)
Let us derive an expression for E20 when the rotor is at standstill.
Let flux passing through stator coil at any time t be cost.
For T-turn armature coil, flux linkage is given by
= Tcost
According to Faradays Law
tTdt
de sin
Considering to be constant, induced e.m.f. is given by
tEe sinmax
Where Emax is the maximum value of e.m.f. generated.
Now, )2(max fTTE mm
The r.m.s. value of generated e.m.f. is
mfTE
E 22
max
Or mfTE 44.4
Where f is frequency of generated e.m.f.
In a practical machine, the armature winding is distributed with fractional pitch coils and few
armature slots are left empty, leading to a distribution factor Kd. If Kp be the pitch factor, then
mdp fTKKE 44.4
-
Basic Electrical & Electronics Engineering
Prepared By: Deependra Singh 14
When rotor is at standstill, induced emf in rotor is given by
220 44.4 fTKKE dp volt per phase
Where, f = supply frequency in Hertz.
= flux per pole produced by the stator
T2 = No. of rotor winding turns in series per phase
Kp = pitch factor of winding
Kd = distribution factor of winding
When rotor is rotating at a slip s, then rotor induced emf is given by phdp fTKKsEsE .44.4. 202 volt per phase
As the rotor frequency fr = s.fs
So, 22 44.4 TfKKE rdp volt per phase
CONCEPT OF SLIP IN 3-PHASE INDUCTION MOTOR
The difference between the synchronous speed and rotor speed, expressed as a ratio of the
synchronous speed, is termed as slip in an IM. So, slip (s) in pu is
s
r
s
rs
n
n
n
nns
1 or, sr nsn 1
Where, ns and nr are synchronous and rotor speeds in rev/s.
In terms of ss nN 60 and rr nN 60 , both in rev/min (rpm), slip is
s
rs
N
NNs
If the slip is expressed in %, then 100/ srs NNNs
Normally, for torques varying from no-load ( zero) to full load value, the slip is proportional
to torque. The slip at full load is 4-5% (0.04-0.05).
-
Basic Electrical & Electronics Engineering
Prepared By: Deependra Singh 15
EXPLANATION OF TORQUE-SLIP CHARACTERISTICS OF 3-PHASE INDUCTION MOTOR
The current per phase in the rotor winding (the equivalent circuit of the rotor, per phase is shown in
Fig. 31.1)
In a similar way, the output power (gross) developed (W) is the loss in the fictitious resistance in the
equivalent circuit as shown earlier, which is
The motor speed in rps is nr = (1-s)ns
The motor speed (angular) in rad/s is r = (1-s)s
The gross torque developed in N-m is
The synchronous speed (angular) is s = 2.ns
The input power to the rotor (or the power transferred from the stator via air gap) is the loss in the
total resistance (r2/s ), which is
The relationship between the input power and the gross torque developed is Pi = s.T0. So, the input
power is also called as torque in synchronous watts, or the torque is:
T0 = (Pi / s)
The Torque slip characteristic is shown in figure 32.1. The slip is
s = (s r)/ s = (ns nr)/ ns = 1-(nr/ns)
The range of speed nr is between 0.0(standstill) and ns(synchronous speed). The range of slip is
between 0.0(nr = ns) and 1.0(nr = 0.0).
-
Basic Electrical & Electronics Engineering
Prepared By: Deependra Singh 16
For low values of slip, r2 >> (s.x2). So, Torque is
This shows that T0 s, the characteristic being linear. The output torque developed is zero (0.0), at
s = 0.0, or if the motor is rotated at synchronous speed (nr = ns). Also, the slip at full load (output
torque = (T0)fl) is normally 4-5% (sfl = 0.04 0.05), the full load speed of IM being 95-96% of
synchronous speed ((nr)fl) = (1-sfl)ns = (0.05 - 0.96)ns).
For large values of slip, r2
-
Basic Electrical & Electronics Engineering
Prepared By: Deependra Singh 17
CLASSIFICATION OF DC MACHINES
DC Machines can be classified as Motors & Generators
1. DC Motors
a. Series Motor
When the field winding of motor is connected in series with armature winding, then the
motor is called as series motor. A series motor has been shown
(a) Series DC Motor
Let Ra is the armature resistance, RSe is series field resistance, I is the armature current. In
case of series motor
I = Ia = ISe (current equation) (i)
V = Eb + Ia(Ra + RSe) (voltage equation) (ii)
And, Pm = EbIa = VIa Ia2(Ra + RSe) (iii)
Where Pm is mechanical power developed.
b. Shunt Motor
If the motor field winding is connected in parallel shunt across armature winding, then the
motor is called as shunt motor. A shunt motor is shown
(b) Shunt DC Motor
In shunt motor,
I = Ia + ISn (current equation) (i)
V = Eb + IaRa (voltage equation) (ii)
-
Basic Electrical & Electronics Engineering
Prepared By: Deependra Singh 18
And, Pm = EbIa = VIa Ia2Ra (iii)
c. Compound Motor
This motor has both (series and shunt) winding.
i. Cumulative Compound Motor: In this type of motor, the series-field flux
aids the shunt-field flux. The cumulative compound motor has been shown.
ii. Differential Compound Motor: In this type of motor, the series-field flux
opposes the shunt-field flux. The differential compound motor has been
shown.
(c) Cumulative Compound DC Motor (d) Differential Compound DC Motor
Different Types of Motors
Comparison and Applications of Different Types of Motors
Types of Motors Characteristics Applications
1. Shunt Motor Approximately constant speed,
Medium starting torque
Used for Medium torque and
constant speed applications like
Lathe, pumps, fans, blowers etc.
2. Series Motor High Starting Torque, Speed is
not constant
Used for high starting torque
applications like tractor, cranes,
conveyors etc.
3. Compound Motor Reasonably high starting
torque, Adjustable speed
For intermittent high torque loads
like shears, punches, planner,
rolling mills etc.
2. DC Generators
A DC generator is classified according to the method of field excitation. There are two
methods of exciting DC generator, namely self-excitation & separately-excitation. Accordingly,
the generators are called Separately-Excited & Self-Excited Generator.
-
Basic Electrical & Electronics Engineering
Prepared By: Deependra Singh 19
When the field winding is excited by the current supplied by the generator, the generator is
said to be self excited. The classification is as follows:
a. Series Excitation Generator: In series excitation generator, the field winding is
connected in series with the armature winding as shown
(e) Series Generator
b. Shunt Excitation Generator: In shunt excitation generator, the field winding is
connected in parallel (shunt) with the armature winding as shown
(f) Shunt Generator
c. Compound Excitation Generator: In compound excitation, there is a combination
of series and shunt winding. It can be either long shunt or short shunt. Depending
upon the combination the generators are classified as:
i. Long Shunt Excitation Generator
-
Basic Electrical & Electronics Engineering
Prepared By: Deependra Singh 20
(g) Long Shunt Generator
ii. Short Shunt Excitation Generator