
BAB III ANALISA DAN PERANCANGAN SISTEMeprints.umm.ac.id/36076/4/jiptummpp-gdl-devrikurni-47936...17...
21
BAB III ANALISA DAN PERANCANGAN SISTEM Bab ini akan membahas mengenai analisis dan perancangan sistem. Pada prinsipnya perancangan dengan sistematika yang baik akan memberikan kemudahan-kemudahan dalam pembuatan tugas akhir ini. 3.1 Inisiasi atau Perencanaan Perencanaan sistem piranti cerdas simulasi tembak menggunakan laser pointer terdapat hal yang perlu diperhatikan, yaitu tentang analisis sistem dan gambaran umum kerja sistem harus sesuai. 3.1.1 Rencana Analisis Sistem Piranti cerdas simulasi tembak laser pointer ini bertujuan untuk memudahkan para anggota militer dalam melakukan latihan menembak. Dengan adanya piranti cerdas simulasi tembak laser pointer ini diharapkan dapat menguragi biaya dan resiko dalam latihan tembak karena dalam latihan menembak resiko dan biaya yang dibutuhkan lumayan besar dan sangat beresiko bagi para pemula untuk melakukan latihan tembak dan menguragi penggunaan amunisi tajam dalam latihan tembak. Cara kerja dalam Piranti cerdas simulasi tembak laser pointer ini yaitu operator menjalankan program aplikasi simulasi tembak yang nanti nya setelah operator menjalankan aplikasi tersebut. Operator memilih mode latihan dan tipe senjata mana yang nantinya dipilih oleh penembak dalam aplikasi tersebut. Kemudian setelah operator memilih mode latihan, proyektor akan menampilkan sasaran tembak pada layar LCD proyektor, yang nantinya di tembak oleh penembak menggunakan senjata yang telah dimodifikasi mengeluarkan sinar laser. Apabila penembak melakukan tembakan senjata akan mengeluarkan sinar laser dan secara bersamaan sensor akan mengirimkan data derajat kelengkungan pada computer operator mengunakan bluetooth yang nantinya akan diolah oleh aplikasi simulasi tembak. Kemudian nantinya webcam akan menagkap gambar layar LCD yang dijadikan sebagai target tembakan, apabila senjata tersebut di tembakkan ke target layar LCD monitor tersebut otomatis webcam akan di capture 16
Transcript of BAB III ANALISA DAN PERANCANGAN SISTEMeprints.umm.ac.id/36076/4/jiptummpp-gdl-devrikurni-47936...17...

16
BAB III
ANALISA DAN PERANCANGAN SISTEM
Bab ini akan membahas mengenai analisis dan perancangan sistem. Pada
prinsipnya perancangan dengan sistematika yang baik akan memberikan
kemudahan-kemudahan dalam pembuatan tugas akhir ini.
3.1 Inisiasi atau Perencanaan
Perencanaan sistem piranti cerdas simulasi tembak menggunakan laser
pointer terdapat hal yang perlu diperhatikan, yaitu tentang analisis sistem dan
gambaran umum kerja sistem harus sesuai.
3.1.1 Rencana Analisis Sistem
Piranti cerdas simulasi tembak laser pointer ini bertujuan untuk
memudahkan para anggota militer dalam melakukan latihan menembak. Dengan
adanya piranti cerdas simulasi tembak laser pointer ini diharapkan dapat menguragi
biaya dan resiko dalam latihan tembak karena dalam latihan menembak resiko dan
biaya yang dibutuhkan lumayan besar dan sangat beresiko bagi para pemula untuk
melakukan latihan tembak dan menguragi penggunaan amunisi tajam dalam latihan
tembak. Cara kerja dalam Piranti cerdas simulasi tembak laser pointer ini yaitu
operator menjalankan program aplikasi simulasi tembak yang nanti nya setelah
operator menjalankan aplikasi tersebut. Operator memilih mode latihan dan tipe
senjata mana yang nantinya dipilih oleh penembak dalam aplikasi tersebut.
Kemudian setelah operator memilih mode latihan, proyektor akan menampilkan
sasaran tembak pada layar LCD proyektor, yang nantinya di tembak oleh penembak
menggunakan senjata yang telah dimodifikasi mengeluarkan sinar laser.
Apabila penembak melakukan tembakan senjata akan mengeluarkan sinar
laser dan secara bersamaan sensor akan mengirimkan data derajat kelengkungan
pada computer operator mengunakan bluetooth yang nantinya akan diolah oleh
aplikasi simulasi tembak. Kemudian nantinya webcam akan menagkap gambar
layar LCD yang dijadikan sebagai target tembakan, apabila senjata tersebut di
tembakkan ke target layar LCD monitor tersebut otomatis webcam akan di capture
16
17
sinar laser yang di tembakkan tersebut yang nantinya hasil capture dari webcam
tersebut diolah.
Setelah melewati tahapan – tahapan tersebut aplikasi akan mengolah data
yang dikirimkan oleh sensor dan hasil capture dari webcam tersebut. Data dari
sensor tersebut diolah menggunakan rumus parabola, dan hasil capture dari
webcam di olah dengan aplikasi simulasi tembak yang telah menggunakan library
OpenCV yang library digunakan untuk mengolah capture dari webcam
menggunakan pengolahan citra digital. capture tersebut di proses thresholding
sehingga hasil capture berubah menjadi warna hitam dan putih yang nantinya
diolah lagi mengunakan library CvBlob untuk di dapatkan nilai koordinat dari sinar
laser. Nilai dari proses pengolahan citra tersebut dan nilai dari sensor di olah lagi
menggunakan rumus parabola sehingga di dapatkan hasil koordinat perkenaan
peluru.
Aplikasi simulasi tembak yang dijalankan operator dapat memberikan
informasi tentang hasil perkenaan peluru dilakukan penembak yaitu berupa nilai
point perkenaan dan tanda perkenaan peluru pada target. Sehingga memudahkan
penembak melakukan evaluasi.
3.1.2 Rencana Gambaran Umum Sistem
Piranti cerdas ini akan mulai beroperasi ketika operator menjalankan
aplikasi, menghidupkan sensor pada senjata dengan sumber tegangan ,kemudian
dilanjutkan menghidupkan dan menghubungkan proyektor dan webcam pada
laptop, dan operator menyalakan bluetooth pada computer yang telah terhubung
dengan bluetooth yang ada pada sensor yang berada pada senjata. Dengan begitu
piranti cerdas simulasi tembak laser pointer dapat berjalan. Dalam menjalankan
aplikasi simulasi tembak yang pertama perlu dilakukan sistem kalibrasi untuk
pencarian koordinat pembanding rumus kalibrasi, kemudian dilanjutkan dengan
proses pengisian form – form untuk informasi penembak dilanjutkan dengan
memilih jenis tembak yang digunakan untuk menembak kemudian memilih mode
yang diinginkan untuk di jadikan target menembak. Gambaran umum sistem ini
ditampilkan berupa flowchart alur kerja sistem pada Gambar 3.1.

18
START
Input Tombol Kalibrasi
Input = true
Membuka File
Data Kalibrasi
Sebelumya
Proses Perhitungan Data Kalibrasi
Input Tombol Hubungkan Senjata
Output Status Senjata
Input Tombol Start Kalibrasi
Pengambilan Citra Dari Titik Kalibrasi
Kalkulasi Rumus Kalibrasi
Cek Koneksi Bluetooth
Status Connected
Status
Koneksi Status Not Connected
Input Data Penembak
Cek
Kelengkapan
No
Yes
Yes
No
Output Status Senjata
E
No
Yes
Output Form Kalibrasi

19
Input Pilih Sanjata
Pilih = SS1 No
Pilih = M16 –
A1
No
Yes Yes
Set Tetapan Senjata M16-
A1
Input Pilih Mode Simulasi Tembak
Mode = 1 Mode = 2 Mode = 3 Mode = 4
Yes Yes
No No No No
Yes Yes
Set Tetapan Mode
Kelompok 100m
Set Tetapan Mode
Kelompok 200m Set Tetapan Mode
Penilaian 100m
Set Tetapan Mode
Penilaian 200m
Output Form
Mode
Kelompok
100m
Output Form
Mode
Kelompok
200m
Output Form
Mode
Penilaian
100m
Output Form
Mode
Penilaian
200m
Input Limit Amunisi
Set Limit Amunisi
B
C
D
Set Tetapan Senjata SS1
Aktivasi Webcam
20
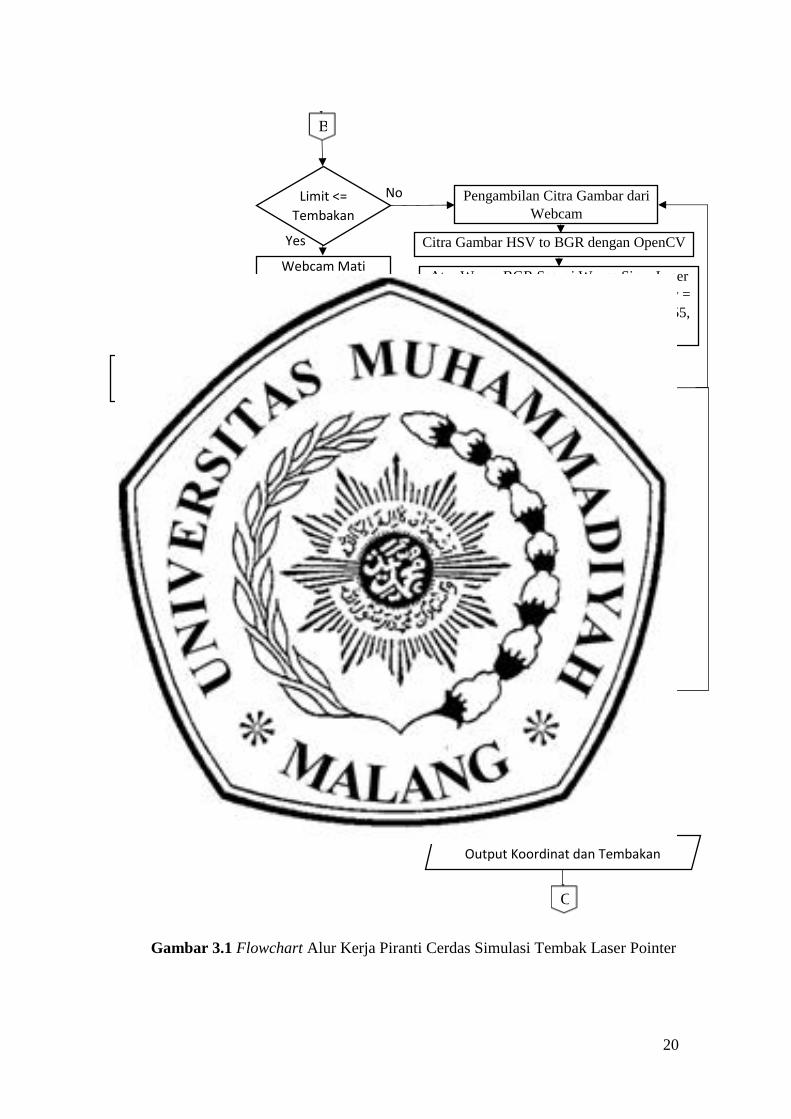
Gambar 3.1 Flowchart Alur Kerja Piranti Cerdas Simulasi Tembak Laser Pointer
Limit <=
Tembakan
Webcam Mati
Input Reset Amunisi
Reset =
True
B
D
Pengambilan Citra Gambar dari
Webcam
Citra Gambar HSV to BGR dengan OpenCV
Deteksi Warna
Laser = true
Pencarian Area Warna Laser
Menggunakan Cvblob
Yes
Koordinat Titik Tengah di
Kalkulasi dengan Nilai Kalibrasi
No
Pencarian Titik Tengah
menggunakan Momen 10 dan 01
Pengecekan Koordinat dengan
Target Tembakan
Koordinat
Mengenai Target
No
Koordinat di tampilkan pada
gambar hasil tembakan
Yes
Tembakan + 1
Output Koordinat dan Tembakan
C
Limit = 0 Tembakan = 0
Input Ganti
Penembak
E Ganti =
True
END
No
Yes
No
Yes
Yes
No
Atur Warna BGR Sesuai Warna Sinar Laser
Menggunakan OpenCV H.low = 60, S.low =
70, V,low = 255, H.High = 255, S.High 255,
V.High 255

21
3.2 Spesifikasi
Dalam spesifikasi ini akan membahas tentang spesifikasi software dan
hardware yang dibutuhkan untuk membangun piranti cerdas simulasi tembak laser
pointer yang sesuai dengan fungsi yang telah dirancang. Berikut adalah spesifikasi
yang diperlukan:
a. Software
Software yang dibutuhkan dalam pembuatan piranti cerdas simulasi tembak
laser pointer ini sebagai berikut :
• IDE Arduino : Software processing yang digunakan untuk menulis program
kedalam Arduino. Processing sendiri merupakan penggabungan antara bahasa
C++ dan Java.
• Visual Studio : Software development yang digunakan untuk membuat aplikasi
simulasi tembak mengunakan bahasa C++.
• Library OpenCV : Library yang digunakan dalam pengolahan citra digital atau
yang sering dikenal dengan Image Processing.
• Library Cvblob : Library pendukung OpenCV yang digunakan untuk
penandaan bidang dan pengambilan koordinat dari bidang tersebut.
b. Hardware
Hardware yang dibutuhkan dalam pembuatan piranti cerdas simulasi tembak
laser pointer ini sebagai berikut :
• Proyektor
• Layar proyektor
• Senjata softgun
• Webcam
• Laptop/computer
• Laser
• Arduino Nano
• Sensor 6-Axis Gyro MPU6050
• Modul HC-05 Bluetooth
• Modul Relay 1 channel
• Power supply

22
• Solenoid Stater
• Push Button
• Pin jumper
• Kabel
3.3 Perancangan Desain
Perancangan desain adalah gambaran rancangan program dan tampilan dari
perangkat – perangkat yang nantinya digunakan dalam pembuatan piranti cerdas
simulasi tembak laser pointer ini.
3.3.1 Perancangan Hardware
Dalam perancangan hardware terdapat dua hardware yang nanti nya
dimodifikasi sehingga nanti nya dapat digunakan dalam operasional piranti cerdas
simulasi tembak laser pointer ini.
Pada perancangan ini akan dibahas mengenai perakitan hardware dan
modifikasi hardware yang akan digunakan dalam pembuatan piranti cerdas
simulasi tembak laser pointer ini. Perangkat/alat yang akan di rakit dan di
modifikasi pada pembuatan simulasi tembak laser pointer ini terdiri dari modifikasi
senjata dan modifikasi webcam.
3.3.1.1 Modifikasi Senjata
Pada modifikasi senjata terbapat beberapa alat tambahan yang nanti nya di
tambahkan pada senjata. Beberapa alat tambahan senjata dapat dilihat pada
Gambar 3.2.
Gambar 3.2 Rancangan Modifikasi Senjata
Senjata dimodifikasi seperti pada Gambar 3.2 agar dapat mengirimkan
informasi sudut senjata dan mendapatkan hentakan yang hampir mendekati
hentakan senjata yang sebenarnya. Berikut adalah penjelasan dari Gambar 3.2

23
sebagai berikut no 5 adalah microkontroler yang mengatur semua sensor dan alat
yang nantinya akan di operasikan. No 4 berupa button swich yang digunakan
nantinya sebagai input, yang apa bila button swich di tekan akan melakukan proses
pengambilan data dari sensor gyroscope no 5 yang kemudian data dikirimkan
melalui modul bluetooth no 6 , button swich juga menghidupkan laser yang
dipasang pada ujung senjata no 7. Setelah data dikirimkan melalui bluetooth
kemudian relay no 2 di hidupkan dan di matikan secara berkala yang dimana relay
di gunakan untuk menghubungkan dan memutuskan arus aliran dari power suply
no 8 untuk menghidupkan solenoid swich no 1 sehingga menghasilkan hentakan.
Berikut adalah beberapa fungsi tambahan alat yang nantinya dipasang
pada senjata, fungsi dari tambahan alat yang akan di pasang yaitu:
3.3.1.1.1 Sensor Deteksi Derajat Kelengkungan
Pada Gambar 3.3, terdapat beberapa komponen, adapun fungsi dari masing
– masing komponen adalah sebagai berikut:
a. Arduino Nano, merupakan otak dari sistem yang akan dibuat.
b. 6-Axis Gyro MPU6050, berfungsi sebagai pengukur derajat kelengkungan.
c. HC-05 Bluetooth, merupakan penghubung antara Arduino dengan computer
operator.
Gambar 3.3 Gambaran Rangkaian Alat Sensor Deteksi Derajat Kelengkungan
Selanjutnya kita membahas tahapan-tahapan perakitan dari rangkaian alat
tersebut. Berikut tahapan-tahapan yang dilakukan dalam perakitan rangkaian alat
tersebut:
24
a) Perancangan rangkaian 6-Axis Gyro MPU6050
Modul Sensor 6-Axis Gyro MPU6050 siap dipakai dengan tegangan supply
sebesar 3-5 VDC .Sensor 6-Axis Gyro MPU6050 berfungsi sebagai pendeteksi
nilai kanal axis X, Y dan Z bersamaan dalam satu waktu. Sensor ini sangat
akurat dengan fasilitas hardware internal 16 bit ADC untuk setiap kanalnya.
Berikut adalah gambar peletakan pin yang terdapat Gambar 3.4 :
Gambar 3.4 Rangkaian Arduino Nano dengan Sensor 6-Axis Gyro MPU6050
b) Perancangan rangkaian HC-05 Bluetooth
Arduino Nano tidak menyediakan perangkat bawaan untuk terhubung dengan
bluetooth. HC-05 Bluetooth merupakan modul tambahan yang memungkinkan
Arduino Nano bisa terhubung dengan device lain menggunakan media bluetooth,
sehingga Arduino Nano dapat mengirim data ke computer operator. Untuk
pemasangannya cukup mudah yaitu dengan menancapkan beberapa pin ke board
Arduino Nano, seperti Gambar 3.5 berikut :
Gambar 3.5 Rangkaian Arduino Nano Dengan HC-05 Bluetooth
3.3.1.1.2 Swich Laser
Berikut adalah gambaran komponen - komponen dalam pembuatan swich
laser yang terdapat pada Gambar 3.6:

25
Gambar 3.6 Gambaran Rangkaian Alat Swich Laser
Pada Gambar 3.6, terdapat beberapa komponen, adapun fungsi dari masing
– masing komponen adalah sebagai berikut:
a. Push Button, sebagai swich penghubung dan pemutus.
b. Laser Pointer, nantinya di pancarkan ke target tembakan.
Selanjutnya kita membahas tahapan perakitan dari rangkaian alat tersebut.
Berikut adalah tahap yang dilakukan dalam perakitan rangkaian alat tersebut:
a) Perancangan alat swich button laser
Dalam laser pointer terdapat tombol untuk menghidupkan laser, dalam simulasi
tembak ini tombol untuk menghidupkan laser tersebut harus di pindah dekat
dengan dengan pemicu di senjata, sehingga apabila penembak menekan pemicu
senjata laser otomatis hidup. Berikut adalah gambaran rancangan yang terdapat
pada Gambar 3.7:
Gambar 3.7 Rangkaian Alat Swich Laser

26
3.3.1.1.3 Swich Hentakkan
Berikut pada Gambar 3.8 adalah gambar komponen - komponen dalam
pembuatan swich hentakan beban:
Gambar 3.8 Gambaran Rangkaian Alat Swich Hentakan
Pada Gambar 3.8 , terdapat beberapa komponen, adapun fungsi dari
masing – masing komponen adalah sebagai berikut:
a. Push Button, sebagai swich penghubung dan pemutus.
b. Soleniod Stater, sebagai penggerak penghasil hentakan.
c. Arduino Nano, digunakan untuk membuat irama hentakan seperti tembakan
peluru dengan mengaktifkan dan menonaktifkan relay.
d. Modul relay, digunakan untuk memutus dan menyambungkan arus ke solenoid
stater.
e. Battrey Aki, digunakan sebagai energi yang digunakan oleh solenoid stater.
Selanjutnya kita membahas tahapan-tahapan perakitan dari rangkaian alat
tersebut. Berikut tahap yang dilakukan dalam perakitan rangkaian alat tersebut:
a) Perancangan alat swich hentakan solenoid stater
Untuk membuat hentakan menggunakan soleniod stater harus membuat proses
menghidup matikan modul relay sehingga dapat membuat soleniod stater dapat
menghasilkan hentakan. Pada Gambar 3.9 adalah gambaran rancangan:

27
Gambar 3.9 Rangkaian Alat Swich Hentakan Seleniod Stater
3.3.1.2 Modifikasi Webcam
Pada modifikasi webcam terdapat beberapa tambahan alat yang nantinya
dipasang pada webcam tambahan alat yang akan di pasang yaitu berupa lapisan
acrilic warna hijau yang nantinya acrylic tersebut digunakan sebagai filter gambar
yang ditangkap oleh webcam yang diletakkan didepan kamera webcam. Sehingga
meringankan kerja nanti pengolahan image prosesing yang dilakukan OpenCV.
Pada Gambar 3.10 adalah gambaran rancangan:
Gambar 3.10 Gambaran Rancangan Modifikasi Webcam
3.3.2 Perancangan Aplikasi Simulasi Tembak
User interface merupakan bagian penting pada sistem ini,
karena bagian ini yang menjembatani pengguna dengan sistem. Desain user
interface yang baik akan memudahkan pengguna dalam menggunakan aplikasi

28
yang dibuat. Berikut adalah gambaran desain aplikasi simulasi tembak yang nanti
digunakan dalam simulasi tembak yang disajikan.
Gambar 3.11 Desain Form Tampilan Utama Aplikasi Simulasi Tembak
Gambar 3.11 adalah gambaran desain tampilan aplikasi simulasi tembak
yang nantinya di operasikan oleh operator. Dimana operator mengatur settingan
aplikasi di form setting, setelah tersetting operator mengisi form data penembak
sesuai dengan identitas dari penembak kemudian memilih senjata yang akan
digunakan penembak pada form senjata. Kemudian dilanjuatkan memilih mode
latihan tembak yang dipilih oleh penembak dan nantinya operator dapat melihat dan
mencetak laporan tembakan yang tadi dilakukan penembak.
Gambar 3.12 Desain Target Tembakan Aplikasi Simulasi Tembak
Form Mode Latihan Tembak
Target
Tembakan
Logo / gambar
Form Senjata
Form Setting
Form data penembak
Form laporan tembakan
Form mode simulasi tembak

29
Gambar 3.12 adalah gambaran desain target tembakan aplikasi simulasi
tembak yang nantinya di tampilkan pada layar proyektor sebagai target tembak,
terdapat 4 macam mode latihan tembak, yang nantinya di sesuaikan yang di pilih
oleh penembak dengan bantuan operator. Tembakan yang dilakukan oleh
penembak nantinya diolah untuk diambil capture hasil tembakan dan nilai dari
tembakan tersebut.
3.3.2.1 Form Setting
Form setting memiliki dua fitur yaitu untuk set kalibrasi dan hubungkan
senjata. Dua fitur tersebut sangatlah penting karena set kalibrasi dibutuhkan untuk
akurasi koordinat tembakan sedangkan hubungkan senjata di gunakan untuk
menghubungkan senjata dengan laptop sehingga apabila senjata melakukan
tembakan senjata akan mengirimkan data sudut kemiringan senjata untuk diketahui
hasil dari lintas peluru.
Gambar 3.13 Flowchart Alur Kerja Set Kalibrasi
Gambar 3.13 adalah gambaran alur kerja tombol set kalibrasi yang dimana
ketika tombol tersebut di tekan akan muncul tampilan form baru untuk proses
kalibrasi dan kalkulasi pengambilan titik pada kalibrasi.
START
Input Set Kalibrasi
Tampil Form Kalibrasi
Pengambilan Citra Dari Titik Kalibrasi
Kalkulasi Rumus Kalibrasi
END

30
Gambar 3.14 Flowchart Alur Kerja Hubungkan Senjata
Pada gambar 3.14 adalah alur kerja tombol hubungkan senjata, dimana
aplikasi mengecek apakah senjata terhubung atau tidak dengan laptop. Koneksi
yang digunakan antara laptop dan senjata adalah koneksi bluetooth.
3.3.2.2 Form Data Penembak
Form data penembak digunakan untuk mengisikan data penembak yang
akan melakukan tembakan yang nantinya terdapat fungsi submit untuk menyimpan
data – data yang berada pada form data penembak.
Gambar 3.15 Flowchart Alur Kerja Tombol Submit

31
Gambar 3.15 adalah alur kerja panel data penembak ketika tombol submit
di tekan Pada panel data penembak terdapat tombol submit yang digunakan untuk
menyimpan data yang sudah di isikan pada form data penembak yang nantinya
digunakan untuk laporan simulasi tembak.
3.3.2.3 Form Senjata
Form senjata digunakan untuk menampilkan pilihan senjata yang nnatinya
digunakan untuk menembak. Terdiri dari 2 senjata yang berbeda yaitu senjata SS1
dan M16-A1.
Penembak memilih tipe senjata sesuai yang di inginkan oleh penembak.
Sehingga ketika penembak menembak, penembak mendapatkan karakteristik lintas
peluru sesuai dengan senjata yang di pilih oleh penembak. Untuk menciptakan
karakteristik lintas peluru dari pilihan masing – masing senjata, di perlukan tetapan
tetapan yang nantinya di gunakan sebagai acuan perhitungan lintas gerak peluru
sesuai dengan rumus parabola sebagai berikut.
START
Input Pilih Sanjata
Set Tetapan Sesuai Pilihan
senjata
Pilih = SS1
END
Yes
No Pilih = M16 –
A1
No
Yes
Gambar 3.16 Flowchart Pilih Jenis
Senjata

32
Rumus di atas digunakan untuk perhitungan kecepatan awal yang nantinya
di gunakan sebagai acuan perhitungan selanjutnya untuk penentuan koordinat.
Rumus diatas digunakan untuk menentukan koordinat tinggi dari peluru
ketika pada jarak tertentu sehigga dapat diketahui apakah peluru ketika pada jarak
tertentu tersebut berada di atas titik bidik atau berada di bawah titik bidik senjata.
3.3.2.4 Form Mode Simulasi Tembak
Pada form mode simulasi tembak terdapat empat mode simulasi yang
nantinya dapat dipilih oleh penembak, yaitu terdiri dari tembak pengelompokan 100
meter, tembak pengelompokan 200 meter, tembak penilaian 100 meter, dan tembak
penilaian 200 meter. Untuk target tembakan, target menyesuaikan jarak dari
tembakan dengan menggunakan rumus perbandingan berbalik nilai sebagai berikut:
Dan berikut adalah alur kerja panel mode simulasi tembak ketika salah satu
tombol mode simulasi di tekan ketika memilih mode mana yang akan di gunakan.
Gambar 3.17 Flowchart Mode Simulasi Tembak

33
Gambar 3.17 adalah gambaran alur kerja ketika salah satu tombol pada
mode simulasi di tekan, kemudian setelah penembak memilih salah satu mode
program maka akan tampil form yang nantinya digunakan sebagai target tembakan
sesuai dengan pilihan mode simulasi tembak yang di pilih.
3.3.2.5 Form Monitoring Hasil Tembak
Form monitoring hasil tembak berfungsi untuk menegetahui informasi hasil
tembakan, mengatur berapa peluru yang harus di gunakan, menyimpan gamabar
hasil tembakan, dan mengatur mulai dan berakhir simulasi tembak. Berikut adalah
gambaran alur kerja dari fungsi fungsi yang ada pada form monitoring hasil
tembakan.
Gambar 3.18 Flowchart Alur Ganti Penembak
Pada Gambar 3.18 ketika tombol ganti penembak di tekan maka data yang
berubungan dengan data penembak, senjata dan mode simulasi tembak akan
dihapus beserta hasil tembakan yang sudah dilakukan sebelumnya. Fungsi tersebut
digunakan apabila terdapat penembak lain yang ingin melakukan tembakan dengan
mode simulasi dan jenis tembakan yang lain.
START
Reset Data Penembak
Reset Set Senjata
Reset Gambar Hasil
END

34
Gambar 3.19 Flowchart Alur Kerja Limit Amunisi Senjata
Pada Gambar 3.19 adalah alur kerja limit amunisi senjata. setelah penembak
melakukan set input limit, input akan disimpan dan nanti akan dibandinngkan
dengan tembakan yang sudah dilakukan, apabila peluru tembakan yang dilakukan
sudah sama dengan limit maka deteksi laser akan di nonaktifkan. Apabila
penembak ingin melakukan latihan tembakan lagi maka terdapat tombol reset untuk
mengeset lagi peluru yang nantinya di gunakan untuk menembak lagi.
START
Set Limit Amunisi
END
Input Limit Amunisi
Limit <=
Tembakan Deteksi Laser Aktir
Deteksi Laser Mati
Yes
No
Reset Amunisi
Reset =
True
No

35
Gambar 3.20 Flowchart Alur Kerja Mulai Deteksi Laser Pointer
Gambar 3.20 menjelaskan tentang cara kerja pengambil gambar secara
realtime menggunakan library OpenCV, apa bila pada gambar terdapat titik hijau
yaitu pancaran dari sinar laser yang di tembakan oleh senjata, maka program akan
mendeteksi koordinat dari pancaran sinar hijau yang terdapat pada gambar yang
ditangkap tersebut. Setelah koordinat diketahui maka koordinat tersebut diolah
menggunakan hasil rumus yang telah diperoleh dari hasil kalibrasi layar
START
Input Mulai
Aktivasi Webcam
Pengambilan Gambar
Olah Gambar Dengan OpenCV
Olah dengan library CvBlob
Deteksi Laser =
true
Pencarian Koordinat
Koordinat di Kalkulasi dengan Nilai
Kalibrasi
END
Yes
No

36
3.3.3 Perancangan Tata Letak Alat
Berikut adalah rancangan desain tata letak alat yang nanti digunakan
dalam simulasi tembak yang disajikan pada Gambar 3.21.
Gambar 3.21 Rancangan Tata Letak Alat
Pada Gambar 3.21 proyektor dan webcam diletakkan diatas agar tidak
mengganggu penembak untuk menembak sasaran yang nanti di tampilkan dalam
layar proyektor nantinya. Untuk laptop / computer operator berada di belakang
penembak sehingga mudah untuk nantinya dalam proses mengoperasikan aplikasi
simulasi tembak. Kemudian senjata yang telah di modifikasi digunakan penembak
untuk menembak. Power supply diletakan di dekat penembak yang nantinya
digunakan sebagai sumber energi untuk menghasilkan hentakan dari solenoid
stater.
Laptop
Webcam
Proyektor
Power supply
Senjata
Modifikasi
Layar Proyektor
Warna Putih


















