
BAB 2 LANDASAN TEORI - · PDF filedasar teori himpunan, ... konvensional. Hal ini umumnya...
38
7 BAB 2 LANDASAN TEORI Dalam bab ini diuraikan beberapa landasan teori yang terkait, mencakup konsep neuro-fuzzy dan soft computing, logika fuzzy, teori himpunan fuzzy, aturan fuzzy dan penalaran fuzzy, fuzzy inference system ( FIS ), serta Adaptive Neuro-Fuzzy Inference System ( ANFIS ). 2.1 Neuro-Fuzzy dan Soft Computing 2.1.1 Pengertian Neuro-Fuzzy dan Soft Computing Neuro-Fuzzy dan Soft Computing ( SC ) adalah integrasi dua pendekatan komplementer: jaringan saraf ( neural network, NN ) yang mengenali pola dan beradaptasi untuk menanggulangi keadaan yang berubah - ubah / acak; sistem inferensi fuzzy ( fuzzy inference system, FIS ) yang menggabungkan pengetahuan manusia serta melakukan inferensi dan pembuatan keputusan. Sinergi ini memungkinkan SC menggabungkan pengetahuan manusia secara efektif, menghadapi ketidakketepatan dan ketidakpastian (Linda, 2007). 2.1.2 Karakteristik Neuro-Fuzzy dan Soft Computing a) Kepakaran manusia SC menggunakan kepakaran manusia dalam bentuk aturan if - then fuzzy, sama baiknya seperti dalam representasi pengetahuan konvensional, untuk memecahkan masalah – masalah praktis.
Transcript of BAB 2 LANDASAN TEORI - · PDF filedasar teori himpunan, ... konvensional. Hal ini umumnya...
7
BAB 2
LANDASAN TEORI
Dalam bab ini diuraikan beberapa landasan teori yang terkait, mencakup konsep
neuro-fuzzy dan soft computing, logika fuzzy, teori himpunan fuzzy, aturan fuzzy dan
penalaran fuzzy, fuzzy inference system ( FIS ), serta Adaptive Neuro-Fuzzy Inference
System ( ANFIS ).
2.1 Neuro-Fuzzy dan Soft Computing
2.1.1 Pengertian Neuro-Fuzzy dan Soft Computing
Neuro-Fuzzy dan Soft Computing ( SC ) adalah integrasi dua pendekatan
komplementer: jaringan saraf ( neural network, NN ) yang mengenali pola
dan beradaptasi untuk menanggulangi keadaan yang berubah - ubah / acak;
sistem inferensi fuzzy ( fuzzy inference system, FIS ) yang menggabungkan
pengetahuan manusia serta melakukan inferensi dan pembuatan keputusan.
Sinergi ini memungkinkan SC menggabungkan pengetahuan manusia secara
efektif, menghadapi ketidakketepatan dan ketidakpastian (Linda, 2007).
2.1.2 Karakteristik Neuro-Fuzzy dan Soft Computing
a) Kepakaran manusia
SC menggunakan kepakaran manusia dalam bentuk aturan if - then
fuzzy, sama baiknya seperti dalam representasi pengetahuan konvensional,
untuk memecahkan masalah – masalah praktis.
8
b) Model – model komputasi biologically inspired
Diinspirasi oleh NN biologis, NN tiruan digunakan secara ekstensif
dalam SC untuk menghadapi persepsi, pengenalan pola, dan regresi
nonlinier serta masalah – masalah klasifikasi.
c) Teknik - teknik optimisasi baru
SC mengaplikasikan metode – metode optimisasi inovatif yang timbul
dari berbagai sumber.
d) Komputasi numeris
Tidak seperti kecerdasan artifisial ( artificial intelligence, AI ) yang
simbolik, SC terutama bergantung pada komputasi numeris.
e) Domain – domain aplikasi baru
Karena komputasi numerisnya, SC telah menemukan sejumlah domain
aplikasi baru disamping domain – domain dengan pendekatan AI.
Domain – domain aplikasi ini membutuhkan komputasi yang intensif.
f) Pembelajaran bebas model
NN dan FIS adaptif mempunyai kemampuan untuk membangun model
menggunakan hanya data contoh sistem target. Pengetahuan detil dalam
sistem help targetmen-setstruktur model inisial, namun ini bukan suatu
keharusan.
g) Komputasi intensif
Tanpa adanya asumsi yang banyak mengenai pengetahuan background
dari masalah yang ingin diselesaikan, neuro-fuzzy dan SC sangat
bergantung pada pengkomputasian menerka angka dalam kecepatan
9
tinggi untuk menemukan aturan – aturan atau susunan yang teratur dari
dalam himpunan data.
h) Toleransi kesalahan
Penghancuran sebuah node / neuron dalam suatu NN atau sebuah
aturan dalam suatu FIS, tidak akan menghancurkan sistem yang berjalan.
Sistem akan tetap bekerja karena arsitektur paralel dan redundannya
meskipun performa berangsur memburuk.
i) Karakteristik goal driven
Neuro-fuzzy dan SC adalah goal driver; jalan yang memimpin state
kini ke solusi tidak terlalu penting selama bergerak menuju tujuan dalam
long run. Pengetahuan domain spesifik menolong mengurangi waktu
komputasi dan pencarian tetapi bukan menjadi suatu kebutuhan.
j) Aplikasi – aplikasi dunia rill
Semua masalah dunia riil mengandung ketidakpastian built-in yang
tidak dapat dielakkan, sehingga terlalu cepat menggunakan pendekatan
konvensional yang memerlukan deskripsi detil dari masalah yang sedang
dipecahkan. SC adalah pendekatan terintegrasi yang seringkali dapat
menggunakan teknik – teknik spesifik dalam subtugas – subtugas untuk
membangun solusi umum yang memuaskan untuk masalah dunia riil
(Jang, Jyh-Shing Roger, Chuen-Tsai Sun, Eiji Mizutani, 1997).
10
2.2 Logika Fuzzy
Dalam teori logika fuzzy menjelaskan sejarah, definisi dan terminologi dasar,
teori operasi himpunan fuzzy, parameter dan formulasi fungsi keanggotaan
( membership function, MF ) serta konfigurasi dan desain sistem logika fuzzy.
Teori logika fuzzy dikemukakan pertama kali oleh Lotfi A. Zadech pada tahun
1965, yaitu suatu pendekatan komputasional dalam pengambilan keputusan sesuai
dengan cara berpikir manusia yang mengijinkan adanya ketidakpastian dan
memperlihatkan suatu logika yang bergradasi. Seperti yang dilakukan oleh manusia
dalam mengambil keputusan, pengertian – pengertian yang ada di dalam pemikiran
manusia diukur dengan kualitas daripada kuantitas (Kulkarni, 2001).
Menurut Sri Kusuma Dewi, logika fuzzy merupakan salah satu komponen
pembentuk Soft Computing. Dasar logika fuzzy adalah teori himpunan fuzzy. Pada
teori himpunan fuzzy, peranan derajat keanggotaan sebagai penentu keberadaan
elemen dalam suatu himpunan sangatlah penting. Nilai keanggotaan atau derajat
keanggotaan atau membership function menjadi ciri utama dari penalaran dengan
logika fuzzy tersebut (Kusumadewi, 2006).
Dalam banyak hal, logika fuzzy digunakan sebagai suatu cara untuk memetakan
permasalahan dari input menuju ke output yang diharapkan. Beberapa contoh yang
dapat diambil antara lain:
1. Manajer pergudangan mengatakan pada manajer produksi seberapa banyak
persediaan barang pada akhir minggu ini, kemudian manajer produksi akan
menetapkan jumlah barang yang harus diproduksi esok hari.
11
2. Seorang pegawai melakukan tugasnya dengan kinerja yang sangat baik,
kemudian atasan akan memberikan reward yang sesuai dengan kinerja
pegawai tersebut (Kusumadewi dan Purnomo, 2004).
Logika fuzzy dapat dianggap sebagai kotak hitam yang menghubungkan antara
input menuju ke ruang output. Kotak hitam tersebut berisi cara atau metode yang
dapat digunakan untuk mengolah data input menjadi output dalam bentuk informasi
yang baik.
Dalam logika klasik hanya mengenal dua nilai kebenaran yaitu benar atau salah
yang disimbolkan oleh nilai 1 dan 0, serta perubahan keanggotaan pada himpunan
klasik berubah secara drastis. Tetapi pada logika fuzzy, sesuatu dapat bernilai
diantara 0 dan 1, serta nilai anggota himpunan diperbolehkan mempunyai gradiasi
di antara menjadi anggota penuh atau hanya sebagian sehingga perubahan
keanggotaan pada logika fuzzy berlangsung secara perlahan atau memberi nilai
kebenaran yang bergradiasi.
Misalkan pada pengertian “tinggi” yang sering digunakan dalam kehidupan
sehari – hari. Pada himpunan klasik hanya mengenal seseorang tinggi jika orang
tersebut memiliki tinggi 180 cm, sedangkan dibawah 180 disebut “pendek”. Namun,
pada himpunan fuzzy, orang yang memiliki tinggi badan 2 m mempunyai nilai
kebenaran penuh atau 1. Sedangkan bila tingginya 175 cm maka seseorang
dianggap misalnya 90% tinggi.
Menurut Sri Kusuma Dewi, ada beberapa alasan mengapa orang menggunakan
logika fuzzy, antara lain :
12
1. Konsep logika fuzzy mudah dimengerti. Karena logika fuzzy menggunakan
dasar teori himpunan, maka konsep matematis yang mendasari penalaran
fuzzy tersebut cukup mudah untuk dimengerti.
2. Logika fuzzy sangat fleksibel, artinya mampu beradaptasi dengan perubahan -
perubahan, dan ketidakpastian yang menyertai permasalahan.
3. Logika fuzzy memiliki toleransi terhadap data yang tidak tepat. Jika diberikan
sekelompok data yang cukup homogen, dan kemudian ada beberapa data
yang “ekslusif”, maka logika fuzzy memiliki kemampuan untuk menangani
data eklusif tersebut.
4. Logika fuzzy mampu memodelkan fungsi - fungsi nonlinear yang sangat
kompleks.
5. Logika fuzzy dapat membangun dan mengaplikasikan pengalaman -
pengalaman para pakar secara langsung tanpa harus melalui proses pelatihan.
Dalam hal ini, sering dikenal dengan nama Fuzzy Expert System menjadi
bagian terpenting.
6. Logika fuzzy dapat bekerjasama dengan teknik - teknik kendali secara
konvensional. Hal ini umumnya terjadi pada aplikasi di bidang teknik mesin
maupun teknik elektro (Kusumadewi, 2006).
Logika fuzzy didasarkan pada bahasa alami. Logika fuzzy menggunakan bahasa
sehari - hari sehingga mudah dimengerti.
2.3 Teori Himpunan Fuzzy
2.3.1 Himpunan Fuzzy
13
Teori himpunan fuzzy diperkenalkan oleh Zadeh pada tahun 1965
(Kulkarni, 2001). Beberapa definisi tentang himpunan fuzzy ( Yan; Ryan;
power; 1994 ), yaitu :
• Jika U adalah objek - objek yang dinotasikan secara generik oleh u, maka
suatu himpunan fuzzy F dalam U adalah suatu himpunan pasangan
berurutan :
F = (2.1)
Dengan adalah derajat keanggotaan u di F yang memetakan U ke ruang
keanggotaan yang terletak pada rentang [0,1].
• Support dari himpunan fuzzy F adalah himpunan klasik dari
sedemikian hingga . Untuk dimana = 0.5 disebut
titik potong.
• Himpunan α-level dari himpunan fuzzy , , adalah himpunan klasik dari
sedemikian hingga .
• Biasanya derajat keanggotaan maksimum untuk elemen didalam
himpunan fuzzy adalah 1. Pada kasus ini himpunan tersebut disebut
ternomalisasi ( normalized ). Sebuah himpunan yang tidak ternomalisasi
dapat dibuat menjadi begitu dengan mengubah semua nilai - nilai
keanggotaan dalam proporsi sehingga membuat nilai terbesar menjadi 1.
Himpunan fuzzy adalah generalisasi konsep himpunan biasa ( ordiner ).
Untuk semesta wacana X, himpunan fuzzy ditentukan oleh fungsi keanggotaan
14
yang memetakan anggota x ke rentang keanggotaan dalam interval [0, 1].
Sedangkan untuk himpunan biasa fungsi keanggotaan bernilai diskrit 0 dan 1.
Berikut didefinisikan beberapa kelas MF ( member function )
terparameter satu dimensi, yaitu MF dengan sebuah input tunggal
(Kusumadewi, 2006).
MF segitiga dispesifikasikan oleh tiga parameter { a, b, c } seperti berikut :
µsegitiga (x) (2.2)
Parameter { a, b, c } ( dengan a < b < c ) menentukan koordinat x dari ketiga
corner yang mendasari MF segitiga.
MF trapesium dispesifikasikan oleh empat parameter { a, b, c, d } sebagai
berikut :
µtrapesium(x, a, b, c, d) (2.3)
Parameter { a, b, c, d } ( dengan a < b ≤ c < d ) menentukan koordinat x dari
keempat corner yang mendasari MF trapesium.
MF Gauss dispesifikasikan oleh dua parameter { c, σ } :
µsegitiga (x) = (2.4)
15
dimana c merepresentasikan pusat MF dan σ mendefinisikan lebar MF.
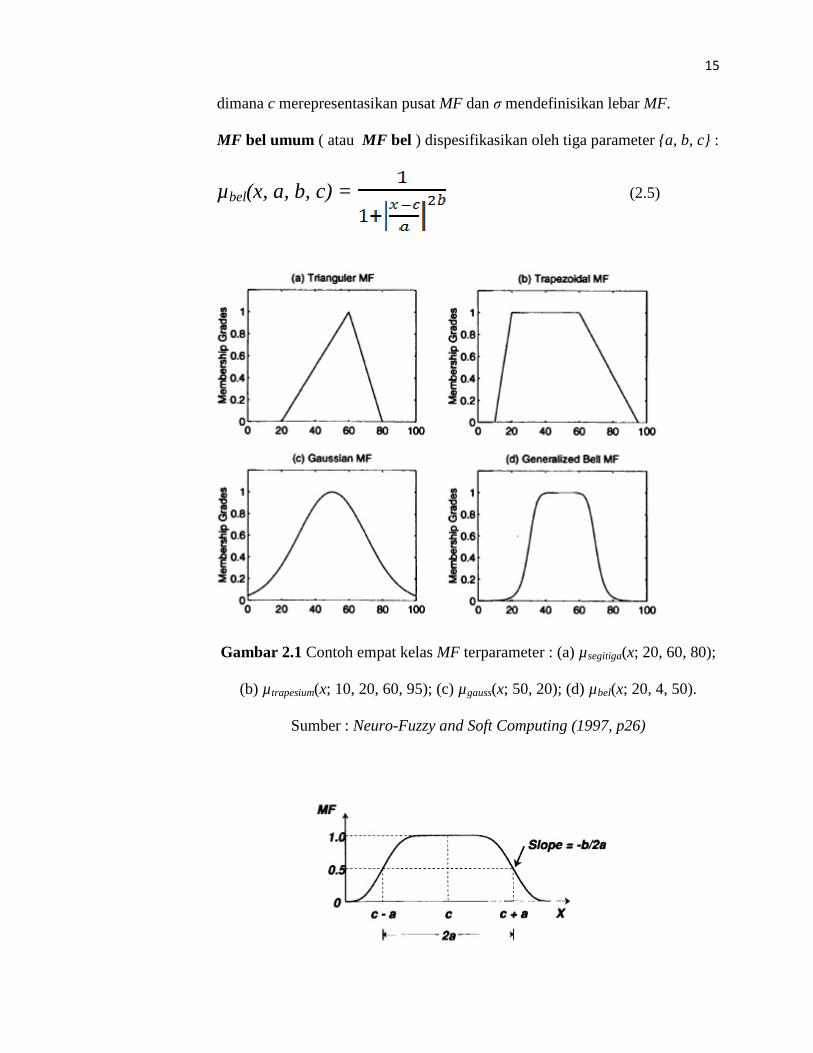
MF bel umum ( atau MF bel ) dispesifikasikan oleh tiga parameter {a, b, c} :
µbel(x, a, b, c) = (2.5)
Gambar 2.1 Contoh empat kelas MF terparameter : (a) µsegitiga(x; 20, 60, 80);
(b) µtrapesium(x; 10, 20, 60, 95); (c) µgauss(x; 50, 20); (d) µbel(x; 20, 4, 50).
Sumber : Neuro-Fuzzy and Soft Computing (1997, p26)
16
Gambar 2.2 Arti fisik dari parameter – parameter dalam suatu MF bel umum
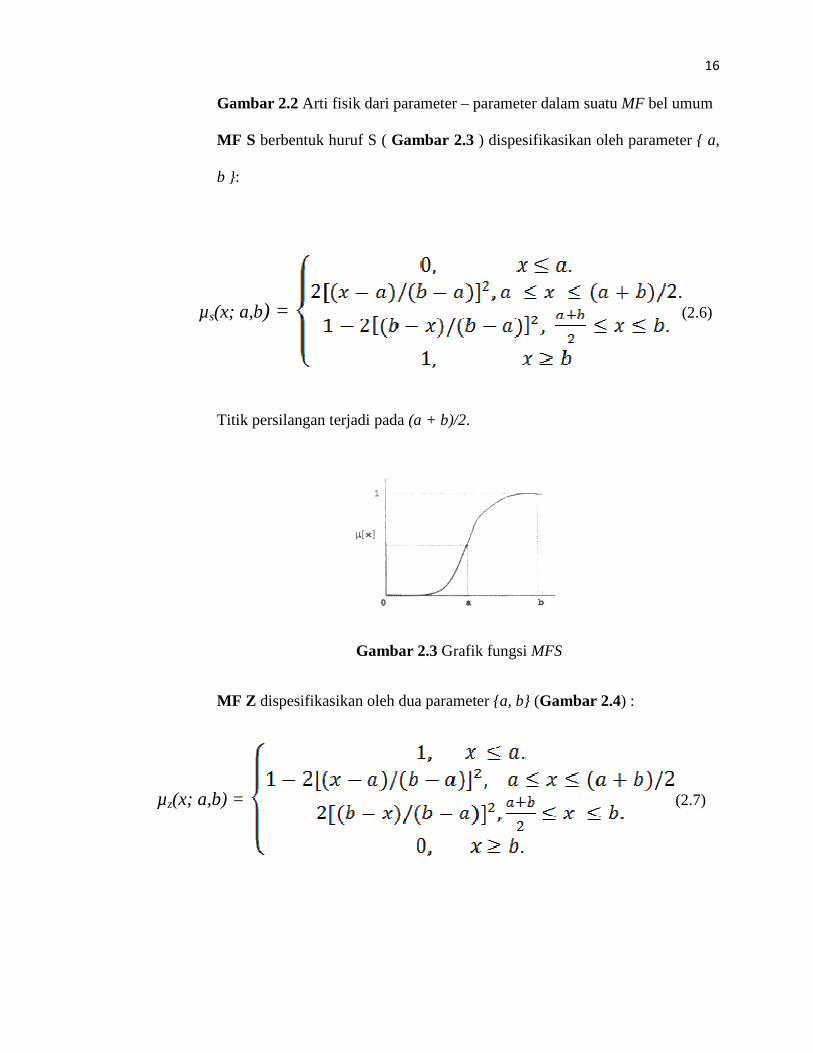
MF S berbentuk huruf S ( Gambar 2.3 ) dispesifikasikan oleh parameter { a,
b }:
µs(x; a,b) = (2.6)
Titik persilangan terjadi pada (a + b)/2.
Gambar 2.3 Grafik fungsi MFS
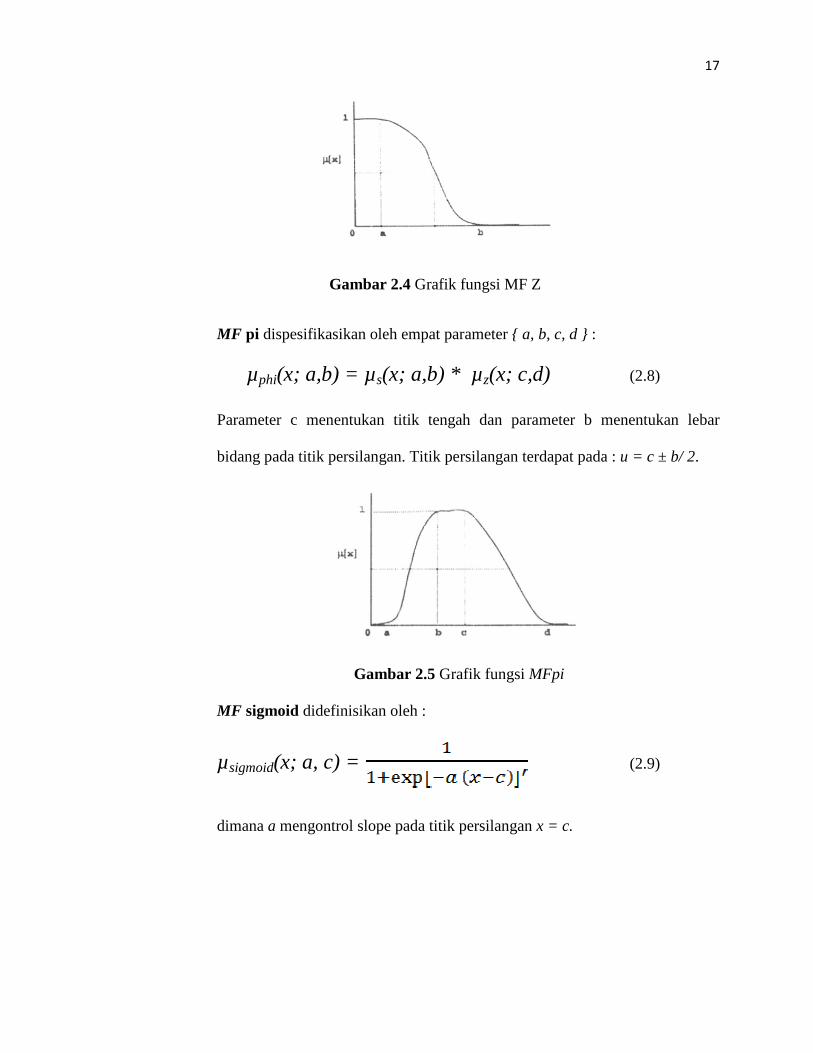
MF Z dispesifikasikan oleh dua parameter {a, b} (Gambar 2.4) :
µz(x; a,b) = (2.7)
17
Gambar 2.4 Grafik fungsi MF Z
MF pi dispesifikasikan oleh empat parameter { a, b, c, d } :
µphi(x; a,b) = µs(x; a,b) * µz(x; c,d) (2.8)
Parameter c menentukan titik tengah dan parameter b menentukan lebar
bidang pada titik persilangan. Titik persilangan terdapat pada : u = c ± b/ 2.
Gambar 2.5 Grafik fungsi MFpi
MF sigmoid didefinisikan oleh :
µsigmoid(x; a, c) = (2.9)
dimana a mengontrol slope pada titik persilangan x = c.
18
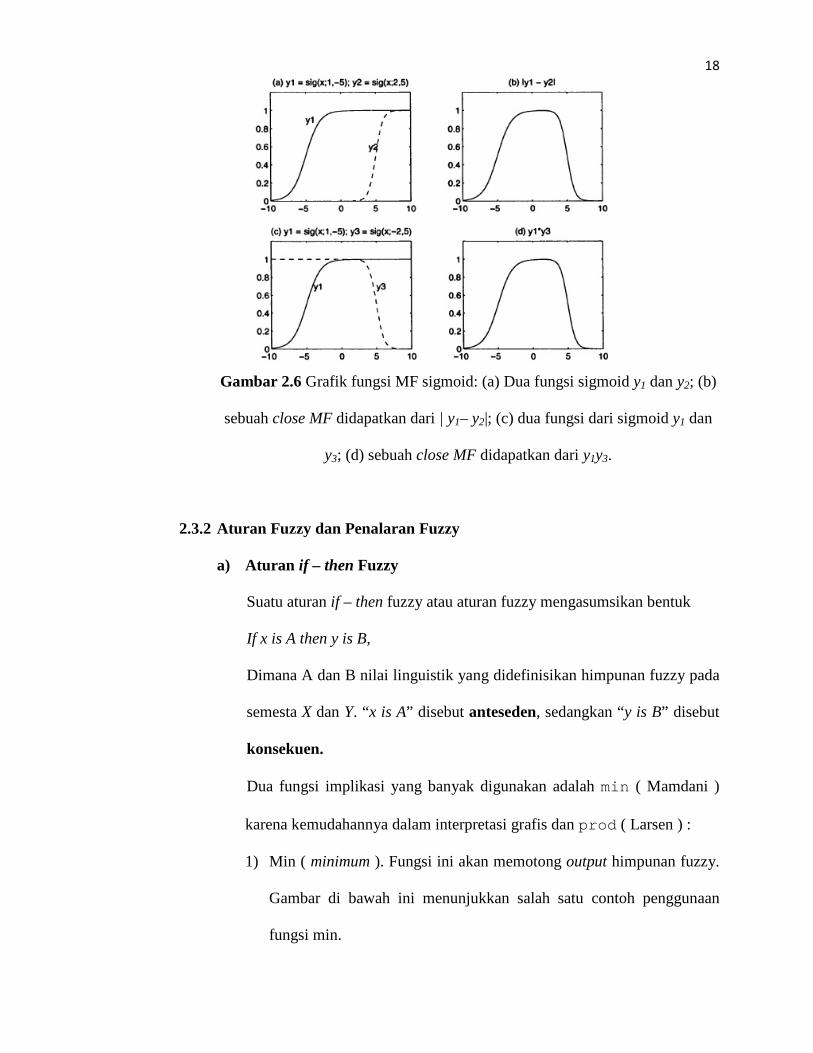
Gambar 2.6 Grafik fungsi MF sigmoid: (a) Dua fungsi sigmoid y1 dan y2; (b)
sebuah close MF didapatkan dari | y1– y2|; (c) dua fungsi dari sigmoid y1 dan
y3; (d) sebuah close MF didapatkan dari y1y3.
2.3.2 Aturan Fuzzy dan Penalaran Fuzzy
a) Aturan if – then Fuzzy
Suatu aturan if – then fuzzy atau aturan fuzzy mengasumsikan bentuk
If x is A then y is B,
Dimana A dan B nilai linguistik yang didefinisikan himpunan fuzzy pada
semesta X dan Y. “x is A” disebut anteseden, sedangkan “y is B” disebut
konsekuen.
Dua fungsi implikasi yang banyak digunakan adalah min ( Mamdani )
karena kemudahannya dalam interpretasi grafis dan prod ( Larsen ) :
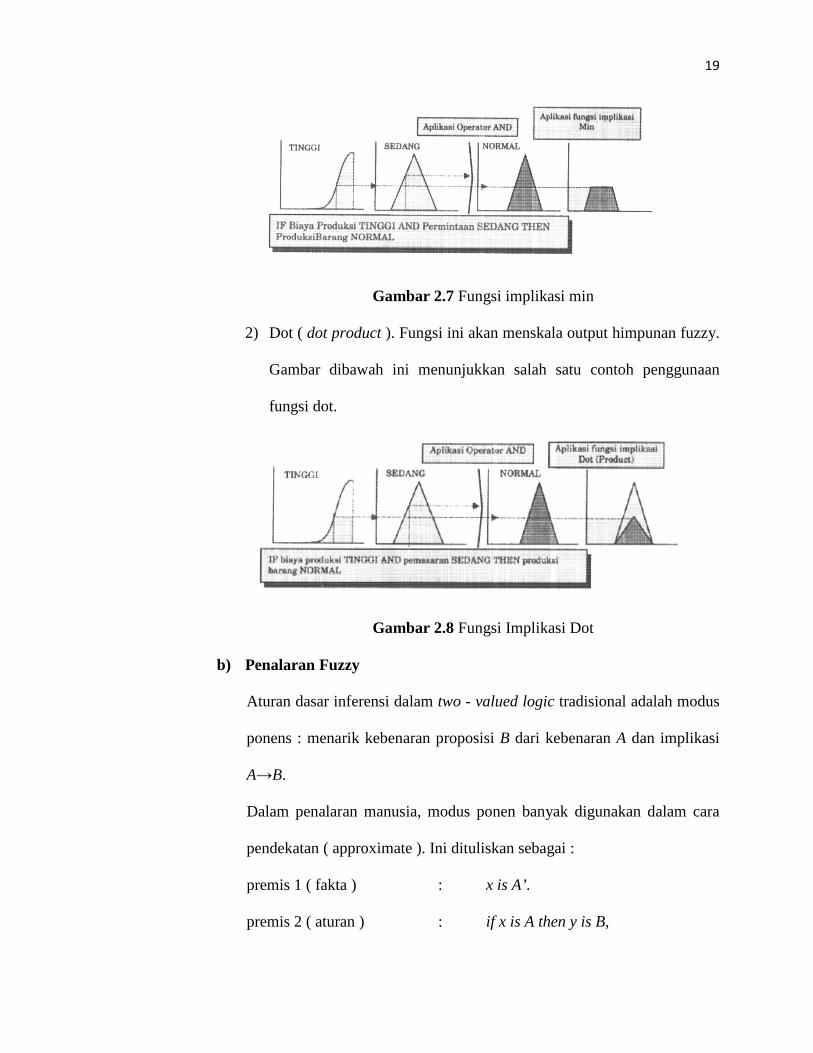
1) Min ( minimum ). Fungsi ini akan memotong output himpunan fuzzy.
Gambar di bawah ini menunjukkan salah satu contoh penggunaan
fungsi min.
19
Gambar 2.7 Fungsi implikasi min
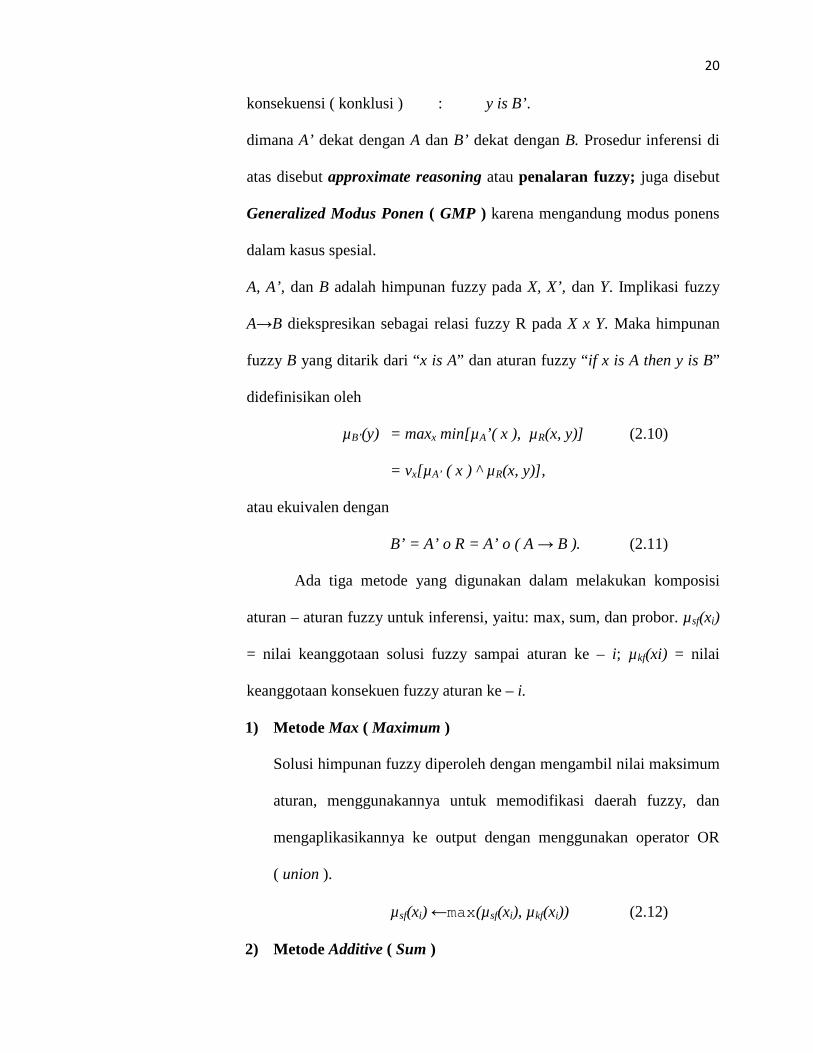
2) Dot ( dot product ). Fungsi ini akan menskala output himpunan fuzzy.
Gambar dibawah ini menunjukkan salah satu contoh penggunaan
fungsi dot.
Gambar 2.8 Fungsi Implikasi Dot
b) Penalaran Fuzzy
Aturan dasar inferensi dalam two - valued logic tradisional adalah modus
ponens : menarik kebenaran proposisi B dari kebenaran A dan implikasi
A→B.
Dalam penalaran manusia, modus ponen banyak digunakan dalam cara
pendekatan ( approximate ). Ini dituliskan sebagai :
premis 1 ( fakta ) : x is A’.
premis 2 ( aturan ) : if x is A then y is B,
20
konsekuensi ( konklusi ) : y is B’.
dimana A’ dekat dengan A dan B’ dekat dengan B. Prosedur inferensi di
atas disebut approximate reasoning atau penalaran fuzzy; juga disebut
Generalized Modus Ponen ( GMP ) karena mengandung modus ponens
dalam kasus spesial.
A, A’, dan B adalah himpunan fuzzy pada X, X’, dan Y. Implikasi fuzzy
A→B diekspresikan sebagai relasi fuzzy R pada X x Y. Maka himpunan
fuzzy B yang ditarik dari “x is A” dan aturan fuzzy “if x is A then y is B”
didefinisikan oleh
µB’(y) = maxx min[µA’( x ), µR(x, y)] (2.10)
= vx[µ A’ ( x ) ^ µR(x, y)],
atau ekuivalen dengan
B’ = A’ o R = A’ o ( A → B ). (2.11)
Ada tiga metode yang digunakan dalam melakukan komposisi
aturan – aturan fuzzy untuk inferensi, yaitu: max, sum, dan probor. µsf(xi)
= nilai keanggotaan solusi fuzzy sampai aturan ke – i; µkf(xi) = nilai
keanggotaan konsekuen fuzzy aturan ke – i.
1) Metode Max ( Maximum )
Solusi himpunan fuzzy diperoleh dengan mengambil nilai maksimum
aturan, menggunakannya untuk memodifikasi daerah fuzzy, dan
mengaplikasikannya ke output dengan menggunakan operator OR
( union ).
µsf(xi) ←max(µsf(xi), µkf(xi)) (2.12)
2) Metode Additive ( Sum )
21
Solusi himpunan fuzzy diperoleh dengan melakukan penjumlahan
terbatas terhadap semua output daerah fuzzy.
µsf(xi) ← min(1, 1 - µsf(xi) + µkf(xi)) (2.13)
3) Metode Probabilistic OR ( probor )
Solusi himpunan fuzzy diperoleh dengan melakukan produk terhadap
semua output daerah fuzzy. Secara umum dituliskan :
µsf(xi) ← (µsf(xi) + µkf(xi)) – (µsf(xi) * µkf(xi)) (2.14)
Jadi, proses penalaran fuzzy dapat dibagi ke dalam empat langkah :
a) Derajat kesepadanan / memasukkan input fuzzy
Bandingkan fakta yang diketahui dengan anteseden dari aturan fuzzy
untuk menemukan derajat kesepadanan dengan memperhatikan setiap
anteseden MF.
b) Kuat penyulutan / mengaplikasikan operator fuzzy
Gabungkan derajat – derajat kesepadanan dengan memperhatikan
anteseden MF – MF dalam suatu aturan menggunakan operator fuzzy
AND atau OR untuk membentuk kuat penyulutan yang
mengindikasikan tingkat bagian anteseden dari aturan dipenuhi.
c) MF konsekuen yang qualified ( terinduksi ) / mengaplikasikan
metode implikasi
Gunakan kuat penyulutan ke MF konsekuen dari suatu aturan untuk
menemukan suatu MF konsekuen qualified.
d) Output keseluruhan MF / komposisi semua output
22
Agresikan semua MF konsekuen qualified untuk mendapatkan suatu
MF output keseluruhan.
2.3.3 Sistem Inferensi Fuzzy
Sistem inferensi fuzzy (FIS) adalah sebuah framework komputasi populer
berdasarkan pada konsep teori himpunan fuzzy, aturan if - then fuzzy, dan
penalaran fuzzy (Kusumadewi, 2006).
Tiga komponen konsep FIS yaitu : baris aturan, mengandung seleksi
dari aturan – aturan fuzzy; basis data, mendefinisikan MF – MF yang
digunakan dalam aturan fuzzy; dan mekanisme penalaran, melakukan
prosedur inferensi pada aturan – aturan dan fakta – fakta yang diberikan untuk
menarik output atau konklusi yang reasonable.
FIS dapat mengambil input fuzzy maupun input tegas ( sebagai fuzzy
singleton ), tapi output yang dihasilkan hampir selalu himpunan fuzzy.
Kadang kala output tegas dibutuhkan, sehingga dibutuhkan metode
defuzifikasi untuk mengekstrak nilai tegas paling baik merepresentasikan
himpunan fuzzy.
Sistem inferensi fuzzy ( Fuzzy Inference System ) pada dasarnya
mendefinisikan pemetaan nonlinear dari vektor data input menjadi skalar
output. Proses pemetaan melibatkan input / output fungsi keanggotaan,
operator - operator fuzzy, aturan fuzzy if - then, agregasi dari himpunan output
dan defuzzification (Hartono, 2010). Model umum dari sistem inferensi fuzzy
ditunjukkan pada gambar dibawah ini:
23
input output
x y
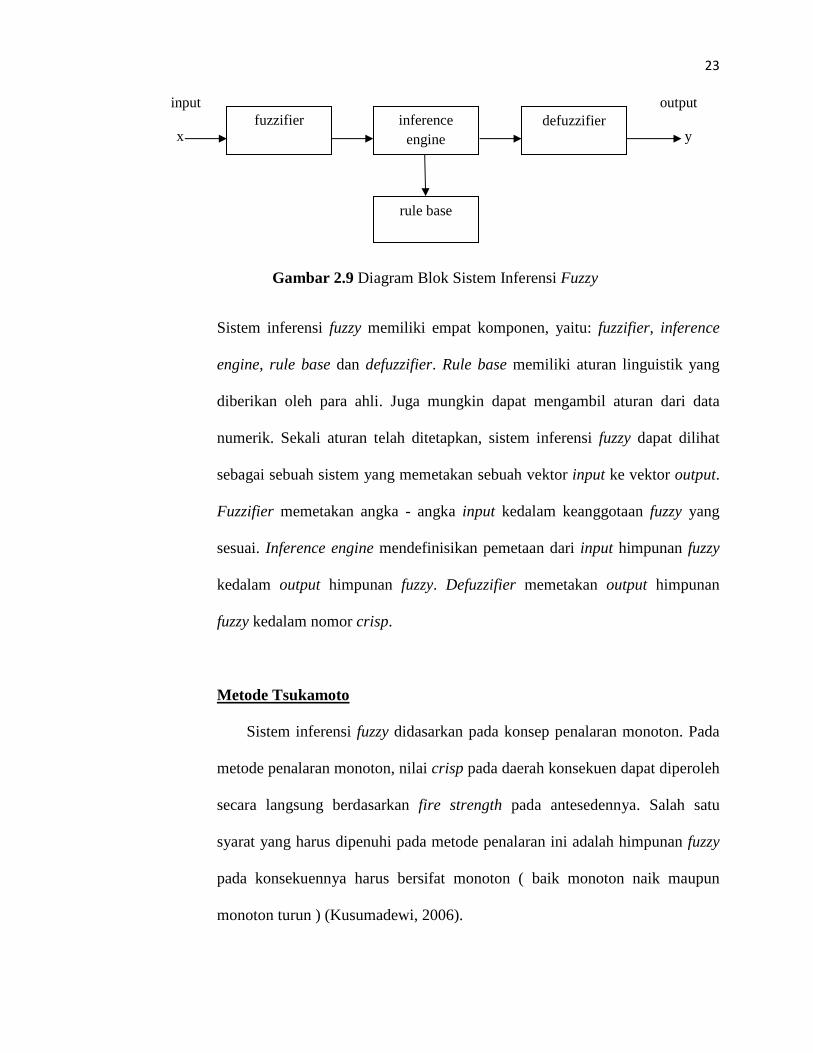
Gambar 2.9 Diagram Blok Sistem Inferensi Fuzzy
Sistem inferensi fuzzy memiliki empat komponen, yaitu: fuzzifier, inference
engine, rule base dan defuzzifier. Rule base memiliki aturan linguistik yang
diberikan oleh para ahli. Juga mungkin dapat mengambil aturan dari data
numerik. Sekali aturan telah ditetapkan, sistem inferensi fuzzy dapat dilihat
sebagai sebuah sistem yang memetakan sebuah vektor input ke vektor output.
Fuzzifier memetakan angka - angka input kedalam keanggotaan fuzzy yang
sesuai. Inference engine mendefinisikan pemetaan dari input himpunan fuzzy
kedalam output himpunan fuzzy. Defuzzifier memetakan output himpunan
fuzzy kedalam nomor crisp.
Metode Tsukamoto
Sistem inferensi fuzzy didasarkan pada konsep penalaran monoton. Pada
metode penalaran monoton, nilai crisp pada daerah konsekuen dapat diperoleh
secara langsung berdasarkan fire strength pada antesedennya. Salah satu
syarat yang harus dipenuhi pada metode penalaran ini adalah himpunan fuzzy
pada konsekuennya harus bersifat monoton ( baik monoton naik maupun
monoton turun ) (Kusumadewi, 2006).
fuzzifier
inference engine
defuzzifier
rule base
24
Model Fuzzy Sugeno
Model Fuzzy Sugeno ( model fuzzy TSK ) diajukan oleh Takagi, Sugeno,
dan Kang ( Takagi dan Sugeno, 1985, hal. 116 – 132; Sugeno dan Kang, 1988,
hal. 15 – 33 ) dalam upaya untuk membangun pendekatan sistematis untuk
membangkitkan aturan – aturan fuzzy dari himpunan data input – output yang
diberikan. Suatu aturan fuzzy khas dalam model fuzzy Sugeno dibentuk
if x is A and y is B then z = f(x,y),
dimana A dan B himpunan fuzzy dalam anteseden dan z = f(x,y) fungsi tegas
dalam konsekuen. Jika f(x, y) polimonial orde satu, FIS yang dihasilkan
disebut model fuzzy Sugeno orde satu. Jika f konstan, dihasilkan model
fuzzy Sugeno orde nol.
Sistem inferensi fuzzy menggunakan metode Sugeno memiliki
karakteristik, yaitu konsekuen tidak merupakan himpunan fuzzy, namun
merupakan suatu persamaan linear dengan variabel - variabel sesuai dengan
variabel - variabel inputnya. Ada 2 model sistem inferensi fuzzy dengan
menggunakan metode TSK, yaitu:
1. Model Fuzzy Sugeno Orde-0
Secara umum bentuk model fuzzy sugeno orde-0 adalah:
IF( iS )° ( iS )° ( iS )°...° ( iS ) THEN z=k (2.15)
dengan adalah himpunan fuzzy ke-i sebagai anteseden, ° adalah
operator fuzzy ( seperti AND atau OR ), dan k adalah suatu konstanta
( tegas ) sebagai konsekuen.

25
2. Model Fuzzy Sugeno Orde-1
Secara umum bentuk model fuzzy Sugeno orde-1 adalah:
IF ( iS ) °...° ( iS ) THEN z= * +...+ * +q (2.16)
dengan adalah himpunan fuzzy ke-i sebagai anteseden, ° adalah
operator fuzzy ( seperti AND atau OR ), adalah suatu konstanta
( tegas ) ke-i dan q juga merupakan konstanta dalam konsekuen. Proses
agresasi dan defuzzy untuk mendapatkan nilai tegas sebagai output untuk
M aturan fuzzy juga dilakukan dengan menggunakan rata - rata terbobot,
yaitu:
z = (2.17)
2.4 Algoritma Pembelajaran Hybrid
Pada saat premise parameters ditemukan, output yang akan terjadi
merupakan kombinasi linear dari consequent parameter, yaitu :
y = (2.18)
=
=
Linear terhadap parameter cij ( i = 1.2 dan j = 0,1,2).
26
Algoritma hybrid akan mengatur parameter – parameter cij secara maju
(forward) dan akan mengatur parameter – parameter {ai, bi, ci} secara mundur
( backward).
Pada langkah maju (forward), input jaringan akan merambat maju sampai
pada lapisan keempat, dimana parameter – parameter cij akan diidentifikasikan
dengan menggunakan metode least-square. Sedangkan pada langkah mundur
( backward ), error sinyal akan merambat mundur dan parameter – parameter {ai,
bi, ci} akan diperbaiki dengan menggunakan metode gradient descent.
Menurut Jang (1997), menggunakan algoritma backpropagation atau
gradient descent untuk mengidentifikasikan parameter – parameter pada suatu
jaringan adaptif biasanya membutuhkan waktu yang relatif lama untuk
konvergen. Mengemukakan algoritma hybrid yang akan menggabungkan antara
steepest descent (SD) dan least square estimator (LSE) untuk
mengidentifikasikan parameter – parameter linear.
2.5 Least Square Estimator (LSE) Rekursif
Salah satu metode LSE adalah LSE rekursif. Pada LSE rekursif, dapat
menambahkan suatu pasangan data [aT | y], sehingga memiliki sebanyak ( m+ 1)
pasangan data. Dari sini dapat dihitung kembali LSE θk. Bentuk semacam ini
dikenal dengan LSE Rekursif.
Karena jumlah parameter ada sebanyak n, maka matriks m x n dapat
diselesaikan dengan menggunakan metode invers, sebagai berikut :
Pn = (AnT An)
-1 (2.19)
27
Θn = (Pn AnT yn) (2.20)
Selanjutnya, iterasi dimulai dari data ke-(n + 1), dengan nilai Pk+1 dan ϴk+1 dapat
dihitung sebagai berikut :
Pk+1 = Pk – (2.21)
θk+1 = θk + Pk+1 ak+1 ( yk+1 - θk) (2.22)
2.6 Perambatan Balik Untuk Jaringan Feedforward
Perambatan balik adalah aturan pelatihan dasar untuk jaringan adaptif
yang pada esensinya metode SD sederhana. Bagian inti adalah bagaimana secara
rekursif memperoleh suatu vektor gradien dimana tiap elemen didefinisikan
sebagai derivatif ukuran galat terhadap suatu parameter.
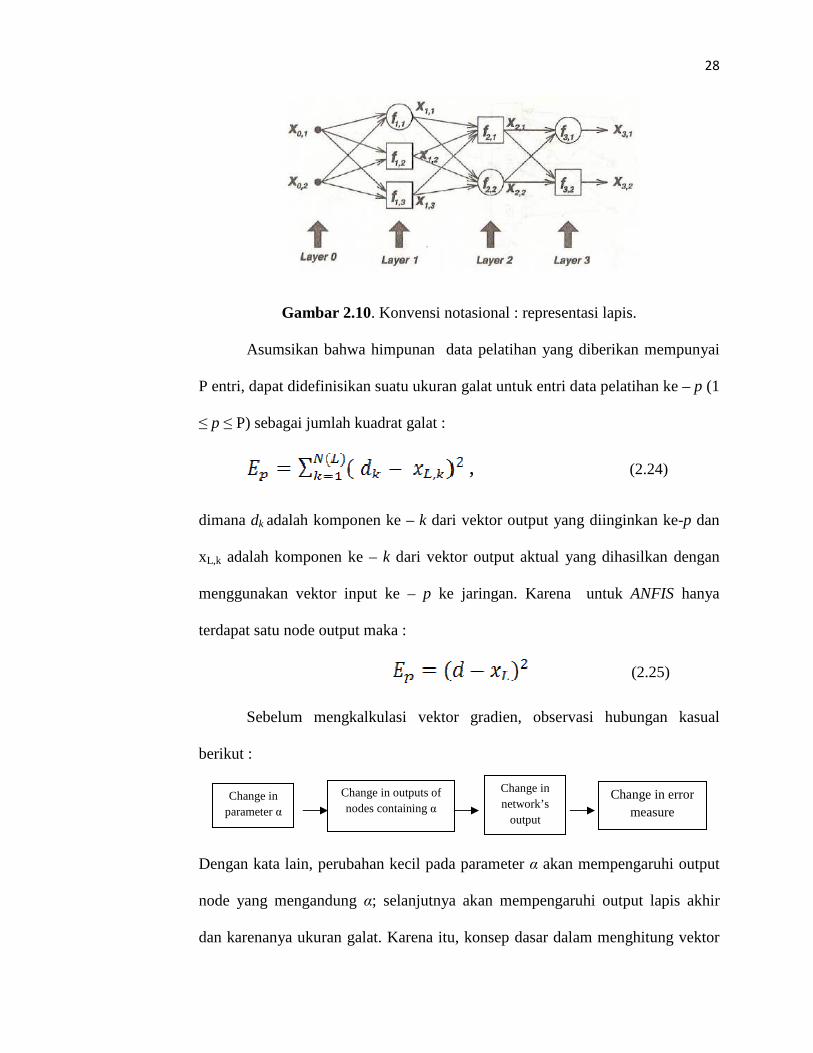
Misalkan sebuah jaringan adaptif feedforward yang diberikan mempunyai
L lapis dan lapis l ( l = 0, 1, …., L; l = 0 merepresentasikan lapisan input)
mempunyai N(I) node. Maka output dan fungsi node i [ i = 1,…, N(l)] dalam
lapis l dapat direpresentasikan sebagai xl,i dan fl,i, seperti yang ditunjukkan pada
gambar dibawah. Karena output suatu mode bergantung pada sinyal – sinyal
yang masuk dan himpunan parameter dari node, maka ekspresi umum untuk
fungsi node fl,i adalah sebagai berikut :
xl,i = fl,i (xl-1,1, ….., xl-1,N(l-1), α, β, γ,…) (2.23)
dimana α, β, γ, dan seterusnya adalah parameter – parameter dari node ini.
28
Gambar 2.10. Konvensi notasional : representasi lapis.
Asumsikan bahwa himpunan data pelatihan yang diberikan mempunyai
P entri, dapat didefinisikan suatu ukuran galat untuk entri data pelatihan ke – p (1
≤ p ≤ P) sebagai jumlah kuadrat galat :
, (2.24)
dimana dk adalah komponen ke – k dari vektor output yang diinginkan ke-p dan
xL,k adalah komponen ke – k dari vektor output aktual yang dihasilkan dengan
menggunakan vektor input ke – p ke jaringan. Karena untuk ANFIS hanya
terdapat satu node output maka :
(2.25)
Sebelum mengkalkulasi vektor gradien, observasi hubungan kasual
berikut :
Dengan kata lain, perubahan kecil pada parameter α akan mempengaruhi output
node yang mengandung α; selanjutnya akan mempengaruhi output lapis akhir
dan karenanya ukuran galat. Karena itu, konsep dasar dalam menghitung vektor
Change in parameter α
Change in outputs of nodes containing α
Change in network’s
output
Change in error measure

29
gradien adalah dengan melewatkan sebuah bentuk informasi derivatif dimulai
dari lapis output dan berjalan mundur lapis demi lapis sampai lapis input dicapai.
Sinyal galat ϵl,i didefinisikan sebagai derivatif ukuran galat Ep terhadap output
node i dalam lapis l, mengambil jalur baik langsung dan tak langsung.
ϵl,i = (2.26)
Ekspresi ini disebut derivatif beruntun oleh Werbos (1974), yang
mempertimbangkan baik jalur langsung maupun tidak langsung yang membawa
pada hubungan kausal.
Sinyal galat output node ke – i (pada lapis L) dapat dikalkulasi secara
langsung :
ϵl,i = = (2.27)
Ini sama dengan ϵL,i = -2(di – xL,i). Untuk node internal pada posisi ke – i dari
lapis l, sinyal galat didapatkan dengan aturan berantai :
ϵl,i = = (2.28)
=
dimana 0 ≤ l ≤ L-1.
Vektor gradien didefinisikan sebagai derivatif ukuran galat terhadap
masing – masing parameter. Jika α adalah suatu parameter dari node ke – i pada
lapis l, maka
30
= ϵl,i (2.29)
Jika parameter α diijinkan untuk di-share di antara node – node berbeda, maka
persamaan di atas diubah ke bentuk yang lebih umum :
(2.30)
dimana S adalah himpunan node yang mengandung α sebagai suatu parameter;
dan x* dan f* adalah output dan fungsi dari suatu node generik dalam S.
Derivatif dari ukuran galat keseluruhan E terhadap α adalah
(2.31)
Karena itu, untuk penurunan tercuram sederhana tanpa minimisasi garis,
formula update untuk parameter generik α (misalnya parameter a, b, atau c)
adalah
dimana η adalah tingkat pelatihan, yang dapat diekspresian sebagai
dimana k adalah ukuran langkah, panjang setiap transisi sepanjang arah
gradien dalam ruang parameter.
2.7 Aturan Pelatihan Hybrid : Mengkombinasikan SD dan LSE
(2.32)
(2.33)
31
Meski dapat menggunakan perambatan balik untuk mengidentifikasikan
parameter jaringan adaptif, namun seringkali memakan waktu panjang sebelum
konvergen. Output jaringan adaptif linier dalam beberapa parameter jaringannya;
sehingga dapat diidentifikasi dengan metode kuadrat terkecil (MKT) linier.
Pendekatan ini menghasilkan aturan pelatihan hybrid yang mengkombinasikan
SD dan LSE untuk identifikasi cepat parameter.
Pelatihan Off-line (Pelatihan Batch)
Diasumsikan jaringan adaptif hanya mempunyai satu output yand
direpresentasikan oleh
o = F(i, S) (2.34)
dimana i adalah vektor variabel – variabel input, S adalah himpunan parameter,
dan F adalah fungsi keseluruhan yang diimplementasikan oleh jaringan adaptif.
Jika terdapat sebuah fungsi H sehingga fungsi komposit H o F linier dalam
beberapa elemen S, maka elemen – elemen ini dapat diidentifikasi oleh MKT.
Secara lebih formal, jika himpunan parameter S dapat dibagi ke dalam dua
himpunan
S = S1 ⊕ S2 (2.35)
(dimana ⊕ merepresentasikan jumlah langsung) sehingga H o F linier dalam
elemen – elemen S2 , maka dengan mengaplikasikan H ke persamaan (2.35),
diperoleh
H = H o F(i, S), (2.36)
32
yang linier dalam S2. Jika diberikan nilai elemen – elemen S1, dapat dimasukkan
P (data pelatihan) ke dalam persamaan (2.34) dan memperoleh persamaan
matriks :
Aθθθθ = y (2.37)
dimana θ adalah vektor yang tidak diketahui yang elemennya adalah parameter –
parameter dalam S2. Solusi terbaik untuk θ yang meminimkan ||Aθ - y||2 adalah
penduga kuadrat terkecil (LSE) θ*.
Sekarang dapat dikombinasikan SD dan LSE untuk meng-update
parameter jaringan adaptif. Untuk pelatihan hybrid yang diaplikasikan ke dalam
mode batch, setiap epoch (periode pelatihan) tersusun atas forward pass dan
backward pass. Dalam forward pass, setelah vektor input dihadirkan,
dikalkulasikan output node lapis demi lapis sampai baris dalam matriks A dan y
dalam persamaan (2.37) diperoleh. Lalu parameter – parameter dalam S2
diidentifikasi baik dengan formula LSE pseudoinverse atau formula LSE rekursif.
Kemudian dihitung ukuran galat untuk setiap pasangan data pelatihan. Dalam
backward pass, sinyal galat merambat dari akhir output menuju akhir input;
vektor gradien diakumulasi untuk setiap entri data pelatihan. Pada akhir
backward pass untuk semua data pelatihan, parameter – parameter dalam S1 di-
update oleh SD dengan persamaan :
Untuk nilai parameter tetap dalam S1 yang diberikan, parameter dalam S2
yang ditemukan dijamin titik optimum global dalam ruang parameter S2 karena
(2.38)
33
pemilihan ukuran kuadrat galat. Bukan hanya aturan pelatihan hybrid ini
mengurangi dimensi ruang pencarian metode SD, tetapi secara substansial juga
mengurangi waktu yang dibutuhkan untuk mencapai konvergensi.
2.8 Adaptive Neuro - Fuzzy Inference System ( ANFIS )
Adaptive Neuro - Fuzzy Inference system adalah arsitektur yang secara
fungsional sama dengan fuzzy rule base model Sugeno, dan juga sama dengan
jaringan saraf dengan fungsi radial dengan sedikit batasan tertentu (Kusumadewi,
2006).
Adaptive Neuro - Fuzzy Inference System ( ANFIS ) merupakan jaringan
saraf adaptif yang berbasis pada sistem kesimpulan fuzzy ( fuzzy inference
system ). Dengan penggunaan suatu prosedur hybrid learning. ANFIS dapat
membangun suatu mapping input - output yang keduanya berdasarkan pada
pengetahuan manusia ( pada bentuk aturan fuzzy if – then ) dengan fungsi
keanggotaan yang tepat.
Sistem kesimpulan fuzzy yang memanfaatkan aturan fuzzy if - then dapat
memodelkan aspek pengetahuan manusia yang kualitatif dan memberi reasoning
process tanpa memanfaatkan analisa kuantitatif yang tepat. Ada beberapa aspek
dasar dalam pendekatan ini yang membutuhkan pemahaman yang lebih baik,
secara rinci :
1) Tidak ada metode baku untuk men-transform pengetahuan atau pengalaman
manusia ke dalam aturan dasar ( rule base ) dan database tentang fuzzy
inference system.
34
2) Ada suatu kebutuhan bagi metode efektif untuk mengatur ( tuning ) fungsi
keanggotaan ( Membership Function / MF ) untuk memperkecil ukuran
kesalahan keluaran atau memaksimalkan indeks pencapaian.
ANFIS dapat bertindak sebagai suatu dasar untuk membangun satu
kumpulan aturan fuzzy if - then dengan fungsi keanggotaan yang tepat, yang
berfungsi untuk menghasilkan pasangan input – output yang tepat.
Sistem fuzzy inference yang digunakan adalah sistem inferensi fuzzy
model Takagi – Sugeno - Kang ( TSK ) orde satu dengan pertimbangan
kesederhanaan dan kemudahan komputasi.
Rule 1 : if x is A1 and y is B1 then z1 = ax + by + c
premis konsekuen
Rule 2 : if x is A2 and y is B2 then z2 = px + qy + c
premis konsekuen
Input adalah x dan y, konsekuen adalah z.
Langkah dari fuzzy reasoning dilakukan oleh sistem kesimpulan fuzzy terdiri
dari 5 layer yaitu :
Layer 1 : Merupakan layer pertama setelah x dan y dimasukkan. Setiap node
ke – I di dalam layer ini merupakan adaptive node dengan fungsi
tersendiri.
O1,i = µAi (x) untuk tiap i = 1, 2, atau
O1, i = µBi – 2(y) untuk tiap I = 3,4
Dimana x ( atau y ) merupakan data input ke dalam node i dan Ai ( atau
Bi-2 ) berisi label linguistic ( misal “kecil” atau “besar” ) yang terkait
dengan node ini. Fungsi yang digunakan, yaitu generalize bell function :
35
(2.39)
Dimana { ai , bi, ci } adalah parameter set. Selama parameter ini berubah,
fungsi bentuk bell ini akan berubah, yang kemudian menunjukkan
berbagai macam bentuk fungsi keanggotaan untuk set fuzzy A. Parameter
dalam layer ini disebut sebagai premise parameters.
Layer 2 : Tiap node dalam layer ini merupakan node yang tetap ditandai
sebagai Π, yang mana outputnya adalah produk keluaran dari semua
signal yang masuk :
(2.40)
Tiap output node merepresentasikan kekuatan dari sebuah rule. Pada
umumnya, Operasi T - norm yang mana saja yang dapat melakukan fuzzy
logic dan dapat digunakan sebagai fungsi node dalam layer ini.
Layer 3 : Tiap node pada layer ini merupakan node yang ditandai dengan
tetap sebagai N. Node ke - i mengkalkulasi rasio dari kekuatan rule ke – i
ke semua jumlah yang didapat dari rule’s firing strengths:
(2.41)
Untuk penggunaannya, tiap output pada layer ini disebut sebagai
normalized firing strengths.

36
Layer 4 : Tiap node i dalam layer ini merupakan node adaptif dengan
sebuah node fungsi
(2.42)
Dimana adalah normalisasi firing strength dimulai dari layer 3 dan {pi,
qi, ri} yang merupakan set parameter dari node ini.
Layer 5 : Node yang tersendiri pada layer ini ditandai dengan tanda tetap
sebagai Σ, yang mana menghitung keseluruhan output sebagai signal
input yang dijumlahkan :
Output keseluruhan (2.43)
(Jang, 1997)
Gambar 2.11 Model fuzzy Sugeno orde satu dengan dua buah input
37
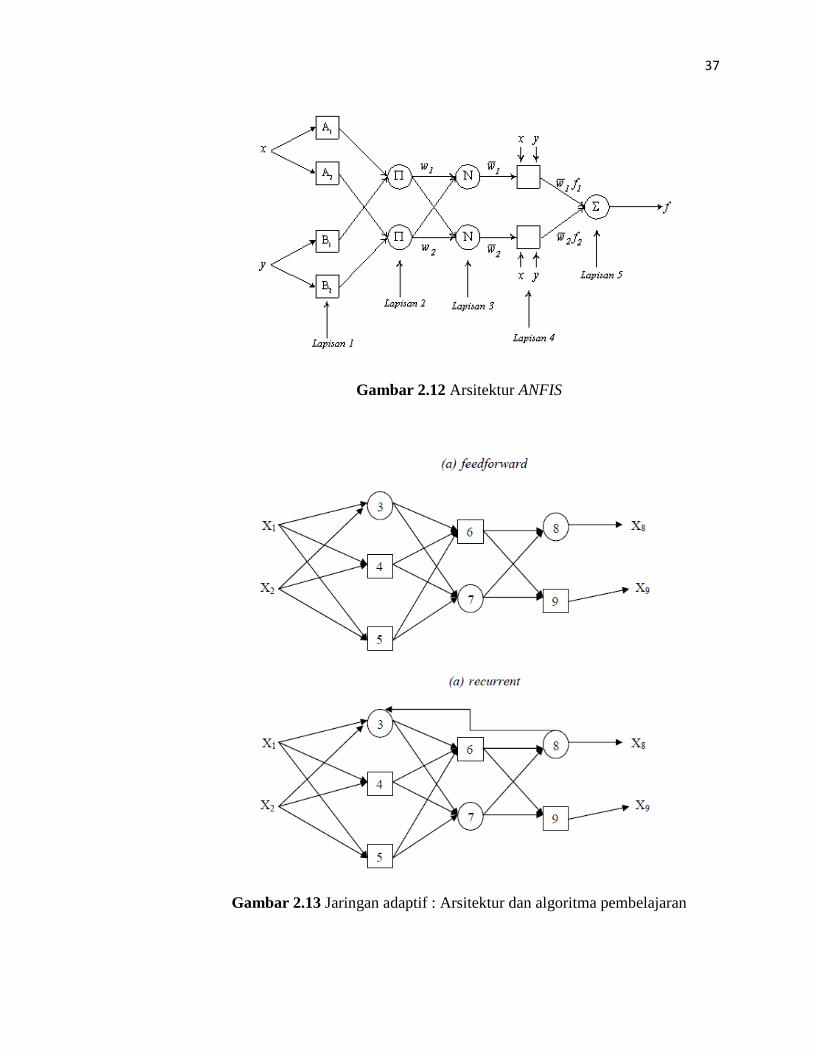
Gambar 2.12 Arsitektur ANFIS
Gambar 2.13 Jaringan adaptif : Arsitektur dan algoritma pembelajaran
38
2.9 Fuzzy Clustering
Clustering mempartisi suatu himpunan data ke dalam beberapa kelompok
sehingga kemiripan di dalam kelompok lebih besar daripada antar kelompok.
Karena itu diperlukan matriks kemiripan yang mengambil dua vektor input dan
mengembalikan nilai kemiripannya. Karena matriks kemiripan sensitif terhadap
rentang elemen – elemen dalam vektor input, maka setiap variabel input harus
dinormalisasi, misalnya kedalam interval [ 0, 1 ]. Teknik – teknik clustering
digunakan bersamaan dengan pemodelan fuzzy terutama untuk menentukan aturan –
aturan if - then fuzzy.
2.10 Komoditi
Komoditi adalah sesuatu benda nyata yang relatif mudah diperdagangkan,
dapat diserahkan secara fisik, dapat disimpan untuk jangka waktu tertentu dan dapat
dipertukarkan dengan produk lainnya dengan jenis yang sama, yang biasa dapat
dibeli atau dijual oleh investor melalui bursa berjangka. Secara umum, suatu produk
yang diperdagangkan, termasuk valuta asing, instrumen keuangan dan indeks.
Komoditi disini berupa barang mineral dan produk pertanian, seperti batu bara,
emas, timah, perak, minyak bumi, dan lain – lain untuk barang mineral, serta jagung,
beras, gandum, kopi, gula, sapi, dan lain – lain untuk produk pertanian (Ferlianto,
2006). Ada juga barang yang disebut sebagai “commoditized” ( tidak lagi dibedakan
berdasarkan merek ) seperti komputer.
Pasar komoditi sangatlah luas dan mendalam, menjanjikan peluang yang
berpotensi untuk menghasilkan banyak uang serta terdapat tantangan tersendiri di
dalamnya. Para investor kebanyakan seringkali kewalahan karena bingung untuk
39
memutuskan beli atau jual tiap – tiap transaksi mereka disebabkan oleh banyaknya
jumlah komoditi yang bisa diperdagangkan. Untuk memutuskan apakah sang
investor harus membeli atau menjual jagung, atau minyak mentah, atau juga
mencari komoditi lainnya jika harga kesemua komoditi yang ada lebih murah
dibandingkan dengan komoditi lainnya. Kesulitan untuk menentukan apakah
keputusan beli atau jual itulah yang membuat para investor menjadi kewalahan dan
juga ketakutan. Bahkan diantara dari mereka yang selalu senang mengambil resiko,
pada akhirnya menjadi jatuh miskin karena terlalu sering rugi (Bouchentouf, 2007).
Berbeda dengan saham, yang mana tiap kali kita membeli sejumlah saham di
dalam suatu perusahaan, kemudian kita akan menjadi bagian dari perusahaan
tersebut, dalam pasar komoditi, tiap – tiap pembelian kita, maka yang kita miliki
hanyalah barang yang telah dibeli, tidak ada kaitannya dengan perusahaan yang
bersangkutan.
2.11 Prediksi dan Ramalan
Prediksi dan Peramalan adalah pernyataan tentang apa yang akan terjadi
dimasa mendatang, biasanya didasari oleh pengalaman dan dasar ilmu pengetahuan
yang dapat dipertanggungjawabkan namun tidak selamanya digunakan. Prediksi dan
ramalan tampak sama namun pada dasarnya berbeda.
Penjelasan perbedaan kedua kata tersebut dapat kita gunakan dua istilah yang
berbeda untuk menguraikan metodologi dalam memperkirakan permintaan masa
datang: "Ramalan" dan "Prediksi". Ramalan merupakan istilah yang agak berbau
nujum. Bila kita melakukan ramalan, maka kita menggabungkan sejumlah besar
informasi subyektif maupun obyektif untuk membentuk perkiraan terbaik kita
40
tentang masa depan. Kita gunakan metode ramalan bila kita hanya memiliki
sejumlah kecil pengalaman yang mendasari perkiraan kita tentang masa depan.
Prediksi atau forecasting di lain pihak, akan diartikan sebagai penggunaan teknik -
teknik statistik dalam membentuk gambaran masa depan berdasarkan pengolahan
angka - angka historis. Prediksi tergantung kepada adanya data historis yang cukup
agar dapat diuraikan secara statistik dan juga tergantung kepada faktor - faktor
pembentuk pasar yang relatif stabil. Prediksi dan peramalan mempunyai kegunaan
masing – masing (Buffa, 1994).
Prediksi tidak terlalu dibutuhkan dalam permintaan kondisi pasar yang stabil,
karena perubahan permintaannya relatif kecil. Tetapi prediksi akan sangat
dibutuhkan bila kondisi permintaan pasar bersifat kompleks dan dinamis.
Dalam kondisi pasar bebas, permintaan pasar lebih banyak bersifat
kompleks dan dinamis karena permintaan tersebut akan tergantung dari keadaan
sosial, ekonomi, politik, aspek teknologi, produk pesaing dan produk subtitusi. Oleh
karena itu, prediksi yang akurat merupakan informasi yang sangat dibutuhkan dalam
pengambilan keputusan manajemen.
Prediksi atau peramalan ini sendiri, seringkali digunakan pada perusahaan –
perusahaan besar untuk mengetahui apa saja yang harus dilakukan agar suatu
perusahaan dapat meraih apa yang mereka ingin capai semenjak mereka
membangun perusahaan tersebut (Flyvbjerg, 2007). Ini memungkinkan suatu
perusahaan untuk mendapatkan keuntungan lebih dan mencegah kerugian besar
dikemudian harinya.
41
2.11.1 Prediksi dan Horison Waktu
Dalam hubungannya dengan horison waktu prediksi, maka kita bisa
mengklasifikasikan prediksi tersebut kedalam 3 kelompok, yaitu :
1. Prediksi jangka panjang, umumnya 2 sampai 10 tahun. Prediksi ini
digunakan untuk perencanaan produk dan perencanaan sumber daya.
2. Prediksi jangka menengah, umumnya 1 sampai 24 bulan. Prediksi ini
lebih khusus dibandingkan dengan prediksi jangka panjang, biasanya
digunakan untuk menentukan aliran kas, perencanaan produksi, dan
penentuan anggaran.
3. Prediksi jangka pendek, umumnya 1 sampai 5 minggu. Prediksi ini
digunakan untuk mengambil keputusan dalam hal perlu tidaknya lembur,
penjadwalan kerja, dan lain - lain keputusan kontrol jangka pendek
(Herjanto, 2008).
2.11.2 Karakteristik Prediksi yang Baik
Prediksi yang baik mempunyai beberapa kriteria yang penting, antara lain
akurasi biaya, dan kemudahan. Penjelasan dari criteria - kriteria tersebut
adalah sebagai berikut :
1. AKURASI
Akurasi dari suatu hasil prediksi diukur dengan kebiasaan dan
kekonsistenan prediksi tersebut. Hasil prediksi dikatakan bias bila
prediksi tersebut terlalu tinggi atau terlalu rendah dibandingkan dengan
42
kenyataan yang sebenarnya terjadi. Hasil prediksi dikatakan konsisten
bila besarnya kesalahan peramalan relatif kecil. Prediksi yang terlalu
rendah akan mengakibatkan kekurangan persediaan, sehingga permintaan
konsumen tidak dapat dipenuhi segera, akibatnya adalah perusahaan
dimungkinkan kehilangan pelanggan dan kehilangan keuntungan
penjualan. Prediksi yang terlalu tinggi akan mengakibatkan terjadinya
penumpukkan persediaan, sehingga banyak modal yang terserap sia - sia.
Keakuratan dari hasil prediksi ini berperan penting dalam
menyeimbangkan persediaan yang ideal ( meminimasi penumpukan
persediaan dan memaksimasi tingkat pelayanan ).
2. BIAYA
Biaya yang diperlukan dalam pembuatan suatu prediksi adalah
tergantung dari jumlah item yang diramalkan, Lamanya periode prediksi,
dan metode prediksi yang dipakai. Ketiga faktor pemicu biaya tersebut
akan mempengaruhi berapa banyak data yang dibutuhkan, bagaimana
pengolahan datanya ( manual atau komputerisasi ), bagaimana
penyimpanan datanya dan siapa tenaga ahli yang diperbantukan.
Pemilihan metode prediksi harus disesuaikan dengan dana yang tersedia
dan tingkat akurasi yang ingin didapat, misalnya item - item yang penting
akan diramalkan dengan metode yang canggih dan mahal, sedangkan
item - item yang kurang penting bisa diramalkan dengan metode yang
sederhana dan murah. Prinsip ini merupakan adopsi dari Hukum Pareto
( Analisa ABC ).
3. KEMUDAHAN
43
Penggunaan metode prediksi yang sederhana, dan mudah diaplikasikan
akan memberikan keuntungan bagi perusahaan. Adalah percuma
memakai metode yang canggih, tetapi tidak dapat diaplikasikan pada
sistem perusahaan karena keterbatasan dana, sumberdaya manusia,
maupun peralatan teknologi (Nasution, 2003).
2.11.3 Beberapa Sifat Hasil Peramalan
Dalam membuat peramalan atau menerapakan hasil suatu peramalan,
maka ada beberapa hal yang harus dipertimbangkan, yaitu:
1. Peramalan pasti mengandung kesalahan, artinya peramal hanya bisa
mengurangi ketidakpastian yang akan terjadi, tetapi tidak dapat
menghilangkan ketidakpastian tersebut.
2. Peramalan seharusnya memberikan informasi tentang berapa ukuran
kesalahan, artinya karena peramalan pasti mengandung kesalahan, maka
adalah penting bagi peramal untuk menginformasikan seberapa besar
kesalahan yang mungkin terjadi.
3. Peramalan jangka pendek lebih akurat dibandingkan peramalan jangka
panjang. Hal ini disebabkan karena pada peramalan jangka pendek, faktor
- faktor yang mempengaruhi permintaan relatif masih konstan, sedangkan
semakin panjang periode peramalan, maka semakin besar pula
44
kemungkinan terjadinya perubahan faktor - faktor yang mempengaruhi
permintaan (Nasution, 2003).
Banyak pengaplikasian dari prediksi dan ramalan ini yang tersebar di
masyarakat, namun, kebanyakan prediksi tersebut digunakan bukan untuk
urusan bisnis, melainkan untuk ramalan cuaca, ramalan pertumbuhan
penduduk, dan beberapa ramalan dan prediksi lainnya yang menyangkut
kehidupan pribadi masing – masing dari mereka.
Prediksi ini adalah apa yang akan kami capai dengan menggunakan
ANFIS untuk mendapatkan hasil data yang diharapkan terjadi di masa
mendatang nantinya dalam memprediksi harga komoditi bahan pangan.












![Fuzzy multi -attribute decision making for students achievement … · 2018-05-06 · MADM and fuzzy MODM (Kusumadewi and Purnomo, 2010; Kusumadewi et al., 2006) [12 -15] . Selection](https://static.fdocuments.net/doc/165x107/5e6489604765415f7e016f7b/fuzzy-multi-attribute-decision-making-for-students-achievement-2018-05-06-madm.jpg)





