Autonomous Landmine Detection Drone - … · Autonomous Landmine Detection Drone ... ground...
1
TEMPLATE DESIGN © 2008 www.PosterPresentations.com Autonomous Landmine Detection Drone Introduction Landmines are a global issue. According to the United Nations (UN), landmines kill more than 15,000 people each year, most of which are children, and leave large fertile land uncultivated in 78 countries such as Angola, Egypt, and Eritrea. The current method of minesweeping involves a human being manually scanning an area using a metal detector, ground penetrating Radar or trained animals such as dogs and rats to sniff out the mines. However, those methods are expensive, inefficient, and risky. According to the UN for every 5,000 landmines removed, one worker is killed and two are injured. It costs 300-1,000 dollars to remove a single mine. It cost more than 5,280 dollars to train one rat which can only live up to 6-8 years. This creates a huge economic and humanitarian crisis in communities in which they exist. However, we can solve this problem using a swarm of autonomous quad-copters equipped with metal detectors to detect mines. The proposed idea is to make the quad-copters autonomously scan a parameter designated by the base station. The quad-copter will virtually run non-stop with the exception of battery swaps. The outcome of the proposed swarm of quad-copter system will not only be efficient it will also reduce the risk involved in minesweeping. In addition, our proposed system is also cost efficient as there is less overhead. Abstract Methodology Materials Schematic of Drone Conclusion/Discussion Graphics of Finished Drone Today in the world we currently have an estimated 110 million anti-personnel Landmine in the world. Sadly the majority of landmine victims are civilians who step on a mine after armed conflicts have ceased. The current methods of minesweeping are expensive and inefficient. However, quad- copters equipped with a metal detector can do the tedious and dangerous task of minesweeping. In this project we are proposing a quad-copter platform that can be utilized for such projects. The quad-copter is controlled from a computer. The computer gets a top view of the quad-copter which is then processed to localize the drone. The computer then calculates the right value for pitch, yaw and roll, then sends those value to the PCTX. The PCTX generate PPM signal that correspond to the value and transmits these values to the radio transmitter through the trainer port and the transmitter then sends the instruction to the Pixhawk flight controller on the quad-copter. Acknowledgements Yikealo Abraha, Berhane Tesfamichael, Joshua Lee, Asadawut Promjak Advisor: Andy Hulse Andy Hulse- Santa Rosa Junior College Faculty Erick Shnell – Santa Rosa Junior College Student Camera PC PCTX Radio Transmitter Flight Controller Radio Receiver Quantity Item Price Total 1 Frame $29.99 $29.99 4 Tiger Motors $40.00 $160.00 4 ESC $11.00 $44.00 1 Telemetry $25.00 $25.00 1 Pixhawk $200.00 $200.00 2 Standard Propellers $10.00 $20.00 2 Pusher Propellers $10.70 $21.40 1 Power board $5.00 $5.00 1 LiPo Batteries Free Free 1 LiPo Charger Free Free 1 Velcro $10.00 $10.00 1 Zip ties $5.00 $5.00 10 Bullet Connectors $10.00 $10.00 Totals: $530.39 Camera • Takes Top view videos of the drone • Sends RGB formatted images to PC PC • The PC receives RGB image frames and process those to localize the quad-copter • The PC then generates value for each channels based on the needed yaw, pitch, and roll • Which then sends floating point values for each channel (9 channels) to PCTX PCTX • Receives floating point value for each of the 9 channels • Generates PPM (Pulse Position-Modulation signal based on the 9 values) • The PPM signal is then sent to the trainer port of the radio transmitter Radio transmitter • Radio transmitter relays the signal to the receiver which is connected to the flight controller • The flight controller receives the PPM signal and translated to the corresponding pitch, yaw, and roll • RGB image format is converted to HSV (Hue Saturation Value) format • HSV image filtered to only show the spherical indicators using inRange() function from the Open image processing library • The contour of the sphere are detected using findContour function • The center of the spheres is located by averaging the location of the contours • The frame distance of the two spheres is calculated and used as to calculate K, where K is the actual distance/frame distance. • The distance of the two sphere is calculated using K and frame distance from the center of the frame. References Building upon Opencv (image processing library), we created a library that localized the quad-copter Communication with the PCTX was not as smooth as we expected. The interface needs a further development We also created a C++ Class for the quad- copter with functions such as “get location” and “move up” Our greatest One of deficiency was calibrating the drone’s sensors in order for complete autonomous flight Further development the Autonomous landmine detection drone project will continue In the future we plan to eliminate the PCTX and radio transmitter; instead we would establish a direct connection between the PC and the flight controller www.care.org/emergencies/facts-about-landmines https://www.icrc.org/eng/resources/documents/misc/ 57j mcy.htm http://www.scielo.org.co/pdf/dyna/v81n183/v81n183a13. pdf Kyle Hounslow – Opencv tutorials Object
Transcript of Autonomous Landmine Detection Drone - … · Autonomous Landmine Detection Drone ... ground...

TEMPLATE DESIGN © 2008
www.PosterPresentations.com
Autonomous Landmine Detection Drone
IntroductionLandmines are a global issue. According to the
United Nations (UN), landmines kill more than
15,000 people each year, most of which are
children, and leave large fertile land uncultivated in
78 countries such as Angola, Egypt, and Eritrea.
The current method of minesweeping involves a
human being manually scanning an area using a
metal detector, ground penetrating Radar or
trained animals such as dogs and rats to sniff out
the mines. However, those methods are
expensive, inefficient, and risky. According to the
UN for every 5,000 landmines removed, one
worker is killed and two are injured.
It costs 300-1,000 dollars to remove a single mine.
It cost more than 5,280 dollars to train one rat
which can only live up to 6-8 years. This creates a
huge economic and humanitarian crisis in
communities in which they exist. However, we can
solve this problem using a swarm of autonomous
quad-copters equipped with metal detectors to
detect mines. The proposed idea is to make the
quad-copters autonomously scan a parameter
designated by the base station. The quad-copter
will virtually run non-stop with the exception of
battery swaps. The outcome of the proposed
swarm of quad-copter system will not only be
efficient it will also reduce the risk involved in
minesweeping. In addition, our proposed system is
also cost efficient as there is less overhead.
Abstract
Methodology
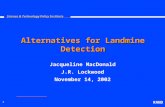
MaterialsSchematic of Drone Conclusion/Discussion
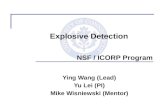
Graphics of Finished Drone
Today in the world we currently have an estimated
110 million anti-personnel Landmine in the world.
Sadly the majority of landmine victims are civilians
who step on a mine after armed conflicts have
ceased. The current methods of minesweeping
are expensive and inefficient. However, quad-
copters equipped with a metal detector can do the
tedious and dangerous task of minesweeping. In
this project we are proposing a quad-copter
platform that can be utilized for such projects. The
quad-copter is controlled from a computer. The
computer gets a top view of the quad-copter which
is then processed to localize the drone. The
computer then calculates the right value for pitch,
yaw and roll, then sends those value to the PCTX.
The PCTX generate PPM signal that correspond
to the value and transmits these values to the
radio transmitter through the trainer port and the
transmitter then sends the instruction to the
Pixhawk flight controller on the quad-copter.
Acknowledgements
Yikealo Abraha, Berhane Tesfamichael, Joshua Lee, Asadawut Promjak
Advisor: Andy Hulse
Andy Hulse- Santa Rosa
Junior College Faculty
Erick Shnell – Santa Rosa
Junior College Student
Camera
PC
PCTX
Radio
Transmitter
Flight
Controller
Radio
Receiver
Quantity Item Price Total
1 Frame $29.99 $29.99
4 Tiger Motors $40.00 $160.00
4 ESC $11.00 $44.00
1 Telemetry $25.00 $25.00
1 Pixhawk $200.00 $200.00
2 Standard Propellers $10.00 $20.00
2 Pusher Propellers $10.70 $21.40
1 Power board $5.00 $5.00
1 LiPo Batteries Free Free
1 LiPo Charger Free Free
1 Velcro $10.00 $10.00
1 Zip ties $5.00 $5.00
10 Bullet Connectors $10.00 $10.00
Totals: $530.39
Camera
• Takes Top view videos of the drone
• Sends RGB formatted images to PC
PC
• The PC receives RGB image frames and
process those to localize the quad-copter
• The PC then generates value for each channels
based on the needed yaw, pitch, and roll
• Which then sends floating point values for each
channel (9 channels) to PCTX
PCTX
• Receives floating point value for each of the 9
channels
• Generates PPM (Pulse Position-Modulation
signal based on the 9 values)
• The PPM signal is then sent to the trainer port of
the radio transmitter
Radio transmitter
• Radio transmitter relays the signal to the
receiver which is connected to the flight controller
• The flight controller receives the PPM signal and
translated to the corresponding pitch, yaw, and
roll
• RGB image format is converted to HSV (Hue
Saturation Value) format
• HSV image filtered to only show the spherical
indicators using inRange() function from the
Open image processing library
• The contour of the sphere are detected using
findContour function
• The center of the spheres is located by
averaging the location of the contours
• The frame distance of the two spheres is
calculated and used as to calculate K, where K
is the actual distance/frame distance.
• The distance of the two sphere is calculated
using K and frame distance from the center of
the frame.
References
Building upon Opencv (image processing
library), we created a library that localized the
quad-copter
Communication with the PCTX was not as
smooth as we expected. The interface needs a
further development
We also created a C++ Class for the quad-
copter with functions such as “get location” and
“move up”
Our greatest One of deficiency was calibrating
the drone’s sensors in order for complete
autonomous flight
Further development the Autonomous landmine
detection drone project will continue
In the future we plan to eliminate the PCTX and
radio transmitter; instead we would establish a
direct connection between the PC and the flight
controller
www.care.org/emergencies/facts-about-landmines
https://www.icrc.org/eng/resources/documents/misc/57j
mcy.htm
http://www.scielo.org.co/pdf/dyna/v81n183/v81n183a13.
Kyle Hounslow – Opencv tutorials
Object