
Automatic Guided Vehicle Eindrapport - eduweb.hhs.nl12111872/Eindverslagen/Eindrapport 1.2.pdf ·...
99
Automatic Guided Vehicle – Eindrapport ALEX LORIER - 12111872 GERBEN TAANMAN - 12044784 MARTIJN VAN PAASSEN - 12076864 IVO REWIERSMA - 12065943 ROBBERT MANNAK - 13127276 DENNIS NELEMAAT - 12114677 WH21 B2 Academy For Technology, Innovation and Society Werktuigbouwkunde, Delft TUTOR: T. BRILLEMAN | 12-1-2014
Transcript of Automatic Guided Vehicle Eindrapport - eduweb.hhs.nl12111872/Eindverslagen/Eindrapport 1.2.pdf ·...

Automatic Guided Vehicle – Eindrapport
ALEX LORIER - 12111872
GERBEN TAANMAN - 12044784
MARTIJN VAN PAASSEN - 12076864
IVO REWIERSMA - 12065943
ROBBERT MANNAK - 13127276
DENNIS NELEMAAT - 12114677
WH21
B2
Academy For Technology, Innovation and Society
Werktuigbouwkunde, Delft
TUTOR: T. BRILLEMAN | 12-1-2014

Thema Enkelstukproduct 2 AGV, WH21B2, Eindrapport, 17-1-2014
1
Voorwoord Deze periode is het onderwerp van dit project Enkelstuksproduct 2. Dit het het onderwerp van het tweede blok van het tweede studiejaar Werktuigbouwkunde aan de Haagse Hoge School.
Bij dit project moet er een automatic guided vehicle (kortweg AGV) ontworpen worden. Ter ondersteuning van dit project worden er colleges geven in mechanica, productietechniek, machine onderdelen en mechatronica. Deze lessen helpen om een beter inzicht te krijgen in het ontwerpen van een AGV.

Thema Enkelstukproduct 2 AGV, WH21B2, Eindrapport, 17-1-2014
2
Samenvatting De samenvatting is een kort stukje, waarin in enkele oogopslagen te zien valt wat er in dit verslag staat. Hierin wordt onderscheid gemaakt tussen de opdracht (waaronder het PvE), het productieproces, de concepten van de AGV en de conclusies van dit project.
De opdracht
De fictieve opdrachtgever van dit project is de Haagse Hogeschool. Er moet een Automated Guided Vehicle ontworpen worden, welke actief is in een tandwielen fabriek. Er moet hierbij rekening gehouden met een aantal door de school gestelde eisen. Een aantal voorbeelden van deze eisen staan hieronder gegeven.
De AGV dient elektrisch aangedreven te zijn.
De AGV dient, via een besturing, in staat te zijn om onbemand transporttaken van
vrachtwagen naar magazijn of van magazijn naar machine te verrichten.
De AGV dient in staat te zijn om pallets ter grootte van een halve Euro pallet
automatisch te laden en lossen.
De AGV dient te beschikken over een binnen 3 minuten uitwisselbare accubak. Het
uitwisselen wordt door personeel uitgevoerd.
De AGV heeft drie wielen, waarbij het neuswiel voor de besturing zorgt.
Aan de hand van verschillende rapporten is dit eindrapport tot stand gekomen. Tijdens dit
ontwerp proces zijn de volgende rapporten afgeleverd:
Een Plan Van Aanpak, hierin staat vermeld op welke gebieden dit project zich heeft
gefocust. Er zijn plannen gemaakt over op welke manier er gewerkt zal worden en
wat de project grenzen zijn.
Een Conceptrapport, via een morfologisch overzicht is er gewerkt naar een
idee/concept welke het beste zou voldoen aan de gestelde eisen en wensen.
Werktuigbouwkundig rapport. In dit rapport is de uitwerking van het concept
gegeven en een doorberekening van de componenten, zoals de stijfheid van het
frame. Ook wordt er dieper op de verschillende componenten, en hun werking,
ingegaan.
Elektrisch rapport. De elektronica verbindt alle onderdelen van de AGV door middel
van een PLC. Ook moeten alle onderdelen van stroom voorzien worden.

Thema Enkelstukproduct 2 AGV, WH21B2, Eindrapport, 17-1-2014
3
Figuur 1: De AGV
Op basis van het ontwerp en specificaties is een compleet 3D model gemaakt in Autodesk
Inventor. Alle elektrische en hydraulische componenten staan in dit model gegeven. Er is
ook gekeken naar de verbindingen tussen deze componenten en de PLC.

Thema Enkelstukproduct 2 AGV, WH21B2, Eindrapport, 17-1-2014
4
Inhoudsopgave Voorwoord ....................................................................................... 1
Samenvatting ................................................................................... 2
De opdracht .................................................................................. 2
Inleiding ......................................................................................... 6
Probleemstelling ............................................................................... 7
Projectgrenzen .............................................................................. 7
Pakket van eisen............................................................................. 7
Fabriekscase ................................................................................. 8
Conceptkeuze .................................................................................. 10
Functieanalyse .............................................................................. 10
Voortbewegen ............................................................................ 10
Veiligheid ................................................................................. 13
Transporteren ............................................................................ 15
Morfologisch overzicht ..................................................................... 16
Conceptkeuze ............................................................................... 20
Ontwerp AGV .................................................................................. 21
Liftmechanisme ............................................................................. 22
Stuurwiel .................................................................................... 23
Aandrijving .................................................................................. 24
Elektrisch systeem ............................................................................ 27
Schematisch wiring diagram .............................................................. 27
3D wiring diagram .......................................................................... 28
Componenteninventaris ................................................................... 29
Hoofdsysteem ............................................................................... 30
PLC keuze ................................................................................. 30
Aansluiten van de subsystemen aan de PLC ............................................ 31
Communicatie systeem .................................................................... 32
Transceivers .............................................................................. 34
Conclusies ...................................................................................... 35
Bijlagen ......................................................................................... 36
1. Planning ................................................................................... 37
2. Planning (MS Project) ................................................................... 38
3. Werkplan .................................................................................. 39
4. De Automatic Guided Vehicle .......................................................... 41

Thema Enkelstukproduct 2 AGV, WH21B2, Eindrapport, 17-1-2014
5
5. Methodisch ontwerpen .................................................................. 43
Kesselring methode ........................................................................ 43
6. Overzicht AGV ............................................................................ 45
Exploded view .............................................................................. 45
Frame ........................................................................................ 46
7. Berekeningen ............................................................................. 47
I. Doorbuiging lepels ..................................................................... 47
II. Hefkracht Mast ...................................................................... 49
III. Bepaling as-diameter en buiging voor het stuurwiel ........................... 50
IV. Draairadius AGV ..................................................................... 52
V. Afschuiving as stuurwiel ............................................................ 53
VI. Lager berekeningen ................................................................. 54
VII. Frame berekening ................................................................... 58
VIII. Doorrekening differentieel ...................................................... 60
IX. Berekening boutverbinding differentieel aandrijfas ........................... 64
X. Bepaling as-diameter en buiging voor de aandrijfas ........................... 65
XI. Afschuiving aandrijfas-wiel ........................................................ 68
XII. Benodigde druk liftmechanisme berekening .................................... 70
XIII. Berekening hydropomp .......................................................... 71
8. Subsystemen AGV ........................................................................ 74
I. Motor .................................................................................... 74
II. Servomotor ........................................................................... 76
III. Servo driver .......................................................................... 77
IV. Navigatie systeem & sensoren ..................................................... 78
V. Veiligheidssysteem & sensoren .................................................... 81
VI. Displays ............................................................................... 83
VII. Accucapaciteit ....................................................................... 84
VIII. Hydraulische componenten ..................................................... 87
9. Werktekeningen .......................................................................... 88
10. Specificaties onderdelen ............................................................. 96
11. Bronvermelding ........................................................................ 98

Thema Enkelstukproduct 2 AGV, WH21B2, Eindrapport, 17-1-2014
6
Inleiding Het eindrapport zal enkel de hoofdcomponenten aankaarten van de AGV. Dit gebeurt op chronologische volgorde waarop de opdracht ook doorlopen is. In de bijlagen zijn alle overige berekeningen en componenten toegevoegd. Er zal in het eindrapport ook veelvuldig verwezen worden naar de bijlage.

Thema Enkelstukproduct 2 AGV, WH21B2, Eindrapport, 17-1-2014
7
Probleemstelling De probleemstelling bij dit project is: ontwerp een Automatic Guided Vehicle (AGV) die in een tandwielkastenfabriek gebruikt kan worden. AGV’s zorgen binnen een fabriek voor het transport van goederen. Een belangrijke eigenschap hierbij is dat de AGV automatisch aangestuurd wordt, waardoor de behoefte aan personeel verdwijnt. Bij het functioneren van de AGV in de fabriek wordt rekening gehouden met allerlei zaken waardoor dit voertuig in storing zou kunnen vallen.
Projectgrenzen Het hoofddoel van dit project is het ontwerpen van een AGV, welke voldoet aan de eisen die in het pakket van eisen gesteld zijn. Hieronder volgen de grenzen:
Er wordt een 3D model met detailtekeningen gemaakt in Autodesk Inventor Professional.
Het frame wordt statisch geanalyseerd op kritieke spanningen, om te zien of het concept functioneert.
Er wordt een aandrijfmotor geselecteerd aan de hand van vermogensberekeningen.
Er wordt een aandrijving voor de besturing van het neuswiel ontworpen.
Er wordt geen besturingsprogramma geschreven voor de aandrijving van de AGV.
De kosten van materiaal en productie worden niet berekend.
Bij het ontwerpen wordt uitgegaan van een seriegrootte van 100 stuks.
Het maken van een prototype valt buiten de grenzen van dit project.
Pakket van eisen
Vaste eisen De AGV dient elektrisch aangedreven te zijn.
De AGV dient, via een besturing, in staat te zijn om onbemand binnen de
werkomgeving transporttaken te verrichten.
De AGV dient in staat te zijn om pallets ter grootte van een halve Euro pallet
automatisch te laden en lossen.
De AGV dient te beschikken over een binnen 3 minuten uitwisselbare
accubak. Het uitwisselen wordt door personeel uitgevoerd.
De AGV heeft drie wielen, waarbij het neuswiel voor de besturing zorgt.
Er dient een aandrijving voor de besturing van het neuswiel te worden
ontworpen.
Het maximale laadgewicht van de AGV bedraagt 10000N. Lagere gewichten
kunnen ook getransporteerd worden.
De AGV dient pallets met een afmeting van 800x600x200mm (lxbxh) te
kunnen dragen. Dit zijn de afmetingen van een halve Euro pallet.
De pallets hebben een maximale opbouwhoogte van 0.9m.
De AGV kan tot een maximale hoogte van 2.2m tillen.

Thema Enkelstukproduct 2 AGV, WH21B2, Eindrapport, 17-1-2014
8
De AGV kan niet omvallen in bochten.
De maximale snelheid van de AGV is 1m/s.
De AGV stopt voor voorwerpen en personen, om botsingen te voorkomen. De
AGV staat binnen 0.3m stil.
De AGV wordt door middel van sensoren begeleid door de fabriek, ze
fungeren als checkpoints.
Een computer geeft transporttaken, welke de AGV vervolgens uitvoert.
De AGV dient voorzien te zijn van een noodstop.
De assen, lagers en tandwielen van de AGV moeten berekend worden op
optredende spanningen en levensduur.
De minimale standtijd van slijtage onderhevige onderdelen bedraagt 3
maanden, uitgaande van 8 uur gebruik per dag en 5 dagen per week.
De AGV is voorzien van een zwaailicht, welke 3 seconden alvorens het
wegrijden aangaat en stand houdt tijdens het rijden.
De AGV kan automatisch -begeleid door sensoren- zijn lading lossen.
Variabele eisen De massa van het frame is lager dan 750kg.
De AGV wordt voorzien van een accupakket dat minimaal 1 uur meegaat.
Fabriekscase Voor het ontwerpen van de AGV is een fabriekscase opgesteld. Het ontwerp moet kunnen functioneren in deze fabriekcase. Voor de opslag zijn de volgende voorwaardes opgesteld:
- Stellingen zijn verdeeld in vakken van
één kuub (1x1x1m)
- Er kunnen drie pallets boven elkaar
worden geplaatst
- Pallets hebben afmetingen van
800x600mm
- Maximale hoogte van de
pallets/pakketten bedraagt 900 mm
- Marge die overblijft aan zijkant en
bovenkant is 100 mm
- Voor en achter is er een marge van
200 mm
Figuur 2: Opslag stellages

Thema Enkelstukproduct 2 AGV, WH21B2, Eindrapport, 17-1-2014
9
Voor de rijpaden gelden de volgende voorwaardes:
- Ruimte voor de AGV’s in de opslag is 3m breed
- Ruimte voor de AGV’s tussen de machines is 6m breed, zodat er 2 langs
elkaar kunnen rijden.
Voor de machinewerkplekken gelden de volgende voorwaardes:
- Naast iedere machine is een open ruimte waar de pallet staat.
- Pallet staat op een exact aangegeven plaats ter bevordering van het ophalen
met de AGV
Figuur 3: Fabriekslayout

Thema Enkelstukproduct 2 AGV, WH21B2, Eindrapport, 17-1-2014
10
Conceptkeuze In dit hoofdstuk zal de oriënterende fase van het project worden weergegeven. Dit wordt gedaan door middel van een fuctieanalyse met daarop volgend een morfologisch overzicht, met tot slot de conceptkeuze.
Functieanalyse Aan de hand van de probleemstelling kan er een functieanalyse worden opgesteld.
Welke functie’s komen er allemaal kijken bij een AGV. Voor de functieanalyse van
de AGV zal er onderscheid gemaakt worden in drie verschillende categorieën:
1. Voortbewegen 2. Veiligheid 3. Transporteren
Voortbewegen Hieronder volgen zes functies van de AGV die alles te maken hebben met het voortbewegen van de AGV.
Aandrijving De AGV rijdt op wielen. Dit is aangegeven door de opdrachtgever. Logischer wijs is een van deze wielen het stuurwiel en de andere wielen zorgen voor de aandrijving. Verder is er vastgesteld dat de aandrijving elektrisch dient te zijn. Hierdoor is het niet mogelijk om van een benzine of diesel motor gebruik te maken. Wat in ieder geval geen goede optie is wegens de uitlaatgassen.
Een elektromotor in combinatie met accu’s is een optie, ware het niet dat accu’s erg zwaar zijn. Echter in vergelijking met het gewicht van een benzine- of dieselmotor, is dat argument verwaarloosbaar. Een elektromotor zorgt voor een instelbare aandrijving zonder uitstoot van giftige stoffen. Ook heeft de motor relatief minder onderhoud nodig.
Driefasen motor Als elektromotor zijn er verschillende typen motoren. Zo kan er gebruikt gemaakt worden van de driefasen motor of draaistroommotor. Dit compacte type motor is een borstelloze asynchrone elektromotor en is daardoor onderhoudsvrij.
Gelijkstroom motor Een gelijkstroom motor is ook een optie. Deze motor maakt gebruik van gelijkstroom en zet door middel van lorentzkrachten de elektrische energie om in mechanische energie. De belangrijkste eigenschap is dat de rotatiesnelheid gemakkelijk kan worden geregeld.
Figuur 4: Driefasen motor
Figuur 5: Gelijkstroom motor

Thema Enkelstukproduct 2 AGV, WH21B2, Eindrapport, 17-1-2014
11
Stappenmotor Daarnaast is het ook mogelijk gebruik te maken van een stappenmotor. Deze motor lijkt op Driefasenmotor maar de hoekverdraaiing kan zeer nauwkeurig worden beheerst.
Overbrenging De overbrenging zorgt ervoor dat de aandrijving verbonden is met de wielen. Hierbij spelen verschillende factoren een rol. Voor langere afstanden zijn kettingen en riemen geschikter. Voor haakse verbindingen zijn wormwielen weer een goede optie.
Figuur 7: Overbrenging van links naar rechts: tandwiel, riem, wormwiel en ketting
Energievoorziening Voor de AGV is een stroombron noodzakelijk. De energievoorziening is aanwezig in de vorm van een accu. Voor het kiezen van de juiste soort accu volgt hier een kort overzicht van de soorten accu’s:
Natte-celtype De elektrolyt, een medium dat een verbinding vormt tussen de anode en kathode, is een vloeistof. Een ander kenmerk van de natte-cel is de open constructie waardoor de accu altijd rechtop dient te blijven staan.
Gel-accu De elektrolyt is een gelachtige substantie. Hierdoor kan het medium niet uit de accu lekken. Door de gel is deze accu minder goed in staat om veel stroom in één keer te kunnen leveren zoals bij het starten van een auto.
AGM-accu (Absorbed Glass Mat) De elektrolyt is een vloeistof, maar wordt door middel van een vlies op zijn plaats gehouden. De AGM-accu kan worden gezien als de opvolger van de natte-cel accu door zijn vele toepassingsmogelijkheden.
Lithium-ion accu (Li-ion accu) Deze accu heeft een hoge energiedichtheid ten opzichte van de andere accu’s. Lithium-ion accu’s mogen niet te diep worden ontladen vanwege beschadiging van de accu. Er dient dan ook een regelsysteem aanwezig te zijn om dit te voorkomen. Van alle opties uit het morfologisch overzicht zijn de lithium-ion accu’s de duurste optie.
Nikkelmetaalhydride accu (NIMH) De NiMH-accu is een compromis tussen de lithium-ion en AGM-accu. De energiedichtheid bevindt zich tussen de twee accu’s in. Ook heeft een NiMH-accu geen regelsysteem nodig om beschadiging van de accu te voorkomen. Het grootste
Figuur 6: Stappenmotor

Thema Enkelstukproduct 2 AGV, WH21B2, Eindrapport, 17-1-2014
12
nadeel is het extra onderhoud dat noodzakelijk is door het relatief snel leeglopen van de accu bij geen gebruik.
Begeleiden De AGV dient op zich zelf te rijden en het is daarom niet mogelijk een kettingbaan of rails met elektrische leidingen te gebruiken als aandrijving. Bovendien kunnen er in een tandwielenfabriek, onderdelen tussen de rails terecht komen en daarom is het niet handig hier gebruik van te maken. De AGV kan op de volgende manieren een route bepalen door de fabriekshal:
Camera’s Door middel van camera’s kan een AGV obstakels zien. De AGV kan de beelden die het binnen krijgt, vergelijken met de opgeslagen route.
Figuur 8: 3 camera's op een AGV
Magneten Door de fabriekshal uit te rusten met een magnetische tape op/in de vloer kan de AGV dit pad volgen. Door het magneetveld te laten veranderen op plaatsen kan de AGV opdrachten ontvangen, zoals versnellen.
Figuur 9: AGV volgt een magneetstrip op de grond
Draad Vergelijkbaar met de magneten, werkt door een draad in de vloer die een frequentie uitzendt die de AGV op kan pikken. De AGV kan deze frequenties vergelijken met opgeslagen commando’s.
Figuur 10: AGV volgt een draad onder het grondoppervlak
Laser Dit werkt op soortgelijke manier als waarop vleermuizen met sonar werken. Door een laser op vaste plaatsen te richten kan een AGV zijn weg vinden. Wanneer de laser terug gekaatst wordt kan de AGV zijn positie afleiden uit zijn programmering.
Figuur 11: AGV vindt doormiddel van lasers zijn weg

Thema Enkelstukproduct 2 AGV, WH21B2, Eindrapport, 17-1-2014
13
Combinaties De draad en camera kunnen gecombineerd worden, er ontstaat een simplistische oplossing. De camera volgt een (gekleurde) draad op de vloer, welke de route voorstelt door de fabriekshal.
Figuur 12: Een camera in de AGV volgt de streep op de grond
Sturen De wielen dienen gedraaid te worden. Dit kan op verschillende manieren. Dit kan onder ander gebeuren via een differentiaal, een servomotor of een stappenmotor.
Opdracht volgen De methode waarop de AGV weet waar het naar toe moet.
Drukknop Dit kan op de simpele manier van drukknoppen. Personeel drukt een knop in, waarna er een signaal verzonden wordt naar de AGV om naar die locatie te komen.
Sensoren Bij deze methode geeft een sensor aan dat er een laadplek (bijna) vol is. Deze stuurt een signaal naar de AGV om de pallet op te komen halen
Veiligheid In een fabriek met personeel is het belangrijk dat de AGV geen ongelukken veroorzaakt. Vandaar dat er ook gekeken moet worden naar de veiligheid.
Detecteren Het is ook van belang dat een AGV op onverwachte situaties kan reageren. Zo kan er binnen de fabriek een gevaarlijke situatie ontstaan door objecten op het pad van de AGV.
Nabijheidsensor Net als de parkeerhulp in de auto geeft deze een signaal af wanneer er een object gevaarlijk dicht in de buurt van de AGV komt. Dit kan bijvoorbeeld het signaal geven om te stoppen totdat het object is verdwenen.
Figuur 13: Een Parkeersensor op de auto.

Thema Enkelstukproduct 2 AGV, WH21B2, Eindrapport, 17-1-2014
14
Check-in De AGV laat weten waar het zich in de fabriek bevindt. Wanneer er een afwijking plaatsvindt, kan er snel actie worden ondernomen. Camera Ook bij het detecteren kan er gebruik gemaakt worden van camera’s. Wanneer er iets door het beeld beweegt, kan de AGV tot stilstand gebracht worden.
Figuur 14: Controle van AGV door middel van RFID chips
Remmen Om de AGV tot stilstand te brengen zijn er twee effectieve methodes.
Remschijven Er bevinden zich remschijven aan de wielen. Remblokken worden tegen deze remschijven gedrukt en de AGV zal door deze extra wrijving tot stilstand komen.
Remrommel Er bevinden zich remtrommels aan de wielen. Maanvormige remschoenen worden tegen deze trommel gedrukt, waardoor er extra wrijving ontstaat en de AGV tot stilstand komt.
Stabiliseren Om te voorkomen dat de AGV omvalt bij ongelijke gewichtsverdeling zal de AGV zich ook moeten kunnen stabiliseren. Hiervoor zijn de volgende methodes.
Steunwielen Door extra wielen te plaatsen op bepaalde punten zal de AGV extra steunpunten verkrijgen. Dit zal gebeuren als het steunwiel de grond aanraakt, omdat er extra gewicht boven dit punt bevindt.
Contragewicht In dit geval kan er ook goed gebruik gemaakt worden van contragewicht. Alleen het transportproduct moet gecompenseerd worden. Dit kan door de andere kant van de AGV extra zwaar te maken.
Combinatie Uiteraard kan er ook voor een combinatie van de bovenstaande twee methodes gekozen worden.

Thema Enkelstukproduct 2 AGV, WH21B2, Eindrapport, 17-1-2014
15
Transporteren Het product dient natuurlijk vervoerd te worden.
Laden en lossen De lading moet automatisch geladen en gelost worden. Er zijn verschillende manieren te bedenken waarop de lading kan worden geladen en gelost.
Steekwagen principe Ten eerste is er de optie om gebruik te maken van een dergelijke constructie als die bij een steekwagen. Hierbij wordt gebruik gemaakt van twee smalle balken die onder de lading kunnen worden gestoken. Vervolgens worden deze balken omhoog gelift, waarna de AGV kan rijden naar zijn volgende bestemming. Eenmaal daar aangekomen zakken de balken, waarna de AGV deze onder de lading vandaan beweegt.
Conveyor deck principe Daarnaast is het mogelijk om gebruik te maken van een AGV met een conveyor deck. Hierbij wordt gebruik gemaakt van rollen, waarop de lading komt te staan. Afhankelijk van het laden of lossen, roteren de rollen linksom of rechtsom. Zodra de lading in positie staat stoppen de rollen met draaien. De rollen zijn voorzien van een materiaal met een hoog wrijvingscoëfficiënt. Hiermee wordt voorkomen dat de lading van de AGV af schuift.
Liften De pallets moeten op verschillende hoogtes in de schappen neergezet te worden.
Schaarlift principe De lading moet op verschillende hoogten kunnen worden geladen en gelost. Hiervoor is het mogelijk om gebruik te maken van een schaarlift wanneer er gebruik wordt
gemaakt van een conveyor deck. In figuur 16 is te zien hoe een dergelijke constructie eruit zou kunnen zien.
Liftmechanisme principe In het geval dat er gebruik wordt gemaakt van een dergelijk systeem als bij een steekwagen, dan kan er worden gekozen voor een liftmechanisme. Een voorbeeld is te zien in figuur 17. In het figuur wordt gebruik gemaakt van kettingen om de lading omhoog te liften. Er kan hier ook worden gekozen voor een hydraulisch systeem.
Figuur 16: Conveyor deck
Figuur 15: Steekwagen
Figuur 17: Schaarlift
Figuur 18: Liftmechanisme

Thema Enkelstukproduct 2 AGV, WH21B2, Eindrapport, 17-1-2014
16
Morfologisch overzicht
Optie 1 2 3 4 5 6
Aandrijving Driefasen motor
Gelijkstroommotor
Stappenmotor
Overbrenging Tandwielen
Riem
Wormwiel
Ketting
Energievoorziening
Natte-celtype
Gel accu
AGM-accu
Li-ion
NiMH
Begeleiden Camera’s
Magneten
Draad
Laser
Combinatie
Sturen Differentiaal
Servo
Stappenmotor

Thema Enkelstukproduct 2 AGV, WH21B2, Eindrapport, 17-1-2014
17
Detecteren Camera’s
Nabijheidsensor
Check-in
Laden en Lossen
Steekwagen principe
Conveyor deck
Liften Schaarlift
Lift
Remmen Schijfrem
Trommelrem

Thema Enkelstukproduct 2 AGV, WH21B2, Eindrapport, 17-1-2014
18
Opdracht volgen
Knop
Sensoren
Combinatie
Stabiliseren Steunwielen
Contragewicht
Combinatie
Tabel 1: Morfologisch overzicht
Keuzeverantwoording morfologisch overzicht Per functie dienen er keuzes te worden gemaakt. Welke functievervuller er wel en niet zal worden gebruikt. Hieronder wordt weergegeven welke keuzes worden gemaakt en waarom;
Aandrijving - Er wordt standaard gekozen voor een gelijkstroommotor, omdat deze aan
alle eisen en wensen voldoet
- De driefasen motor werkt niet op gelijkstroom en zou hiermee het ontwerp
onnodig ingewikkeld maken
- De stappenmotor wordt als te duur beschouwd en heeft extra mogelijkheden
die overbodig zijn voor de AGV
Overbrenging - Een wormwiel zal niet worden gebruikt vanwege zijn geringe rendement
- Tandwielen zullen niet worden gebruikt vanwege hun beperkte vermogen om
afstand te overbruggen en hun slijtagegevoeligheid
Energievoorziening - Er wordt standaard voor AGM-accu’s gekozen gezien deze het beste voldoet
aan de gebruikseisen
- Gelaccu’s zullen niet worden gebruikt vanwege hun lagere vermogen
- Li-ion technologie is te duur om toe te passen op een AGV
- NiMH accu’s vallen af, omdat deze zeer traag laden
Thema Enkelstukproduct 2 AGV, WH21B2, Eindrapport, 17-1-2014
19
Laden en lossen
- Er wordt standaard gekozen voor een steekwagenprincipe gezien hiervoor
geen aanpassingen aan de fabriek te hoeven worden gemaakt
- Er wordt niet gekozen voor een conveyor deck, omdat hiervoor onnodig veel
aanpassingen in de fabriek moeten worden gemaakt (rekken en laadpunten)
Liftmechanisme - Er zal geen gebruik worden gemaakt van een schaarlift, omdat deze niet in
combinatie met het steekwagenprincipe te gebruiken valt
- Vanwege het vorige punt is het liftconcept de enige die aan de eisen voldoet
Begeleiden - Magneet-, draad- en laserbesturing zijn afzonderlijk te beperkt voor de
precieze begeleiding. Deze zullen in combinatie worden gebruikt om aan de
hoge eis te voldoen
- Camera’s zullen niet worden gebruikt gezien deze een operator of een zwaar
besturingssysteem nodig hebben.
Sturen - Een differentiaalbesturing valt af, omdat deze geen voordelen heeft ten
opzichte van de andere concepten en lastiger te realiseren is
Detecteren - Het check-in systeem valt af aangezien de nauwkeurigheid door personeel op
de werkvloer negatief beïnvloed kan worden
Opdracht volgen - Het gebruik van alleen een knop valt af, omdat deze op zichzelf niet voldoen
aan de automatiseringseisen
Stabiliseren - Er wordt standaard gekozen voor een contragewicht, omdat dit ook deels
kan worden gecombineerd met de accu’s
- Er worden geen steunwielen gebruikt gezien deze lastig zijn te plaatsen ik
het ontwerp en er andere manieren zijn die ook volstaan

Thema Enkelstukproduct 2 AGV, WH21B2, Eindrapport, 17-1-2014
20
Conceptkeuze Om tot de juiste conceptkeuze te komen is er een methodisch onderzoek verricht. Deze is te vinden in bijlage 5. Het rode concept heeft beter gescoord in het methodisch onderzoek.
Concept Rood In concept rood is gekozen voor een gelijkstroommotor welke van energie wordt voorzien door middel van AGM accu’s. Voor de overbrenging naar de wielen is gekozen voor een riem. Door de combinatie van stalen kabels en rubber kan deze goed dynamisch worden belast.
Om het transport in werking te stellen wordt er gebruik gemaakt van een combinatie van knoppen, sensoren en touchscreen. Bij de machine zijn knoppen/sensoren die een signaal versturen als er een AGV naar deze machine toe moet komen. Wanneer een AGV op bestemming is kan doormiddel van een touchscreen de afleverplek van de tandwielen geselecteerd worden. Dit alles wordt bestuurd door een maincomputer, die zich in de fabriek bevindt.
Het pad van de AGV wordt bepaald met behulp van lasers en magneetstrippen. Het sturen van de AGV wordt verzorgd door een servomotor. In combinatie met tandwielen zorgt deze dat het stuurwiel voldoende kan worden gedraaid.
Om te voorkomen dat de AGV onderweg nergens tegenaan botst wordt er gebruik gemaakt van nabijheidsensoren. Het remmen wordt vervolgens verzorgd door schijfremmen. Hiervoor is gekozen, omdat deze gemakkelijk zijn in onderhoud.
Gezien de AGV zeer stabiel zal moeten zijn om te verzekeren dat deze niet zal omvallen wordt er gebruik gemaakt van een contragewicht. Daarnaast heeft de AGV een zeer lage snelheid, waardoor omvallen in bochten wordt voorkomen.
Tot slot wordt er voor het laden van de pallets gebruik gemaakt van een steekwagensysteem. Deze kan door middel van een lift omhoog getild worden.

Thema Enkelstukproduct 2 AGV, WH21B2, Eindrapport, 17-1-2014
21
Ontwerp AGV Het ontwerp van de AGV word gemaakt aan de hand van de concept keuzes. Alle onderdelen van de AGV moeten op moeten in het ontwerp worden opgenomen. Hieronder worden de basisonderdelen van de AGV toegelicht.
In figuur 18 is de AGV zonder beschermingskap te zien. Hierin zijn de volgende onderdelen te onderscheiden:
1. Accu’s 2. Gereserveerde
ruimte 3. Liftmechanisme 4. Stuurwiel 5. Aandrijving
Het liftmechanisme, stuurwiel en aandrijving worden elk apart nog toegelicht.
Accu’s De accu’s zijn aan de andere kant van het liftmechanisme geplaatst om te dienen als contragewicht. Daarnaast zijn de accu’s voorzien van handgrepen waardoor het gemakkelijk is deze van AGV de verwijderen om ze eventueel aan de lader te hangen of te vervangen. De accu’s zitten het stuurmechanisme niet in de weg. Er zijn in totaal 5 accu’s aanwezig in de AGV.
Gereserveerde ruimte Deze ruimte is gereserveerd voor alle elektra en aansturingmechanisme (het geheugen) van de AGV.
Figuur 19: AGV zonder kap
Thema Enkelstukproduct 2 AGV, WH21B2, Eindrapport, 17-1-2014
22
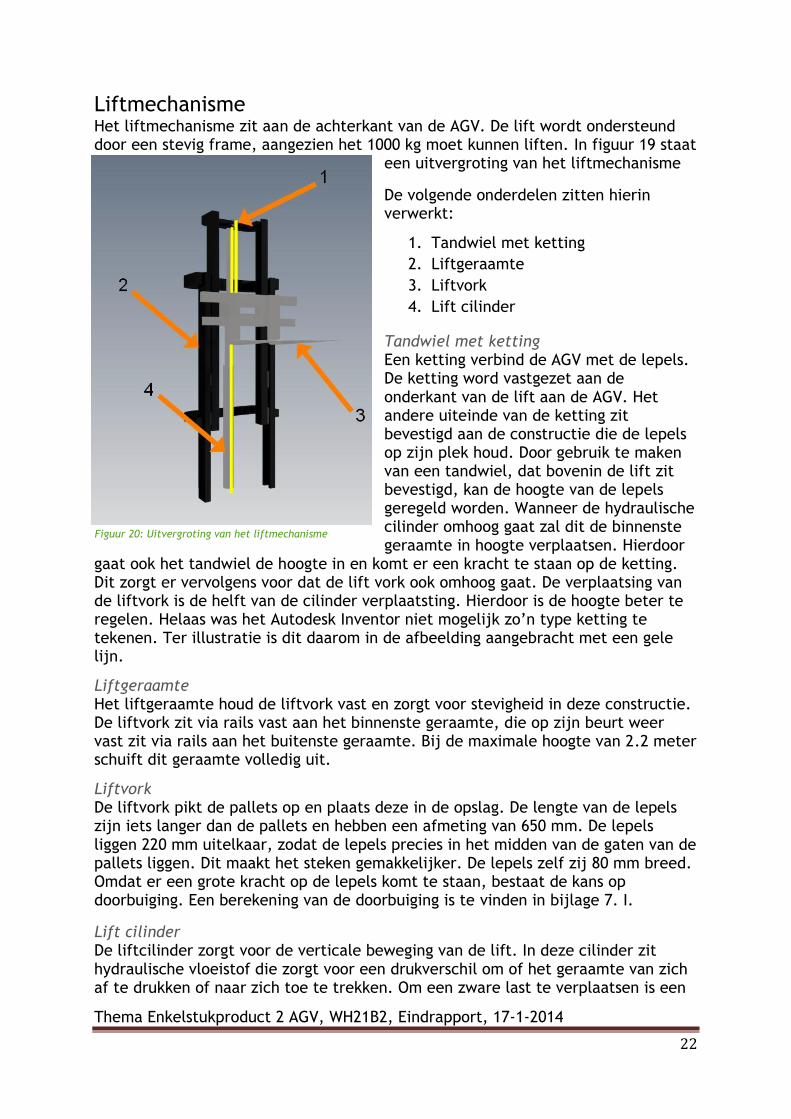
Liftmechanisme Het liftmechanisme zit aan de achterkant van de AGV. De lift wordt ondersteund door een stevig frame, aangezien het 1000 kg moet kunnen liften. In figuur 19 staat
een uitvergroting van het liftmechanisme
De volgende onderdelen zitten hierin verwerkt:
1. Tandwiel met ketting
2. Liftgeraamte
3. Liftvork
4. Lift cilinder
Tandwiel met ketting Een ketting verbind de AGV met de lepels. De ketting word vastgezet aan de onderkant van de lift aan de AGV. Het andere uiteinde van de ketting zit bevestigd aan de constructie die de lepels op zijn plek houd. Door gebruik te maken van een tandwiel, dat bovenin de lift zit bevestigd, kan de hoogte van de lepels geregeld worden. Wanneer de hydraulische cilinder omhoog gaat zal dit de binnenste geraamte in hoogte verplaatsen. Hierdoor
gaat ook het tandwiel de hoogte in en komt er een kracht te staan op de ketting. Dit zorgt er vervolgens voor dat de lift vork ook omhoog gaat. De verplaatsing van de liftvork is de helft van de cilinder verplaatsting. Hierdoor is de hoogte beter te regelen. Helaas was het Autodesk Inventor niet mogelijk zo’n type ketting te tekenen. Ter illustratie is dit daarom in de afbeelding aangebracht met een gele lijn.
Liftgeraamte Het liftgeraamte houd de liftvork vast en zorgt voor stevigheid in deze constructie. De liftvork zit via rails vast aan het binnenste geraamte, die op zijn beurt weer vast zit via rails aan het buitenste geraamte. Bij de maximale hoogte van 2.2 meter schuift dit geraamte volledig uit.
Liftvork De liftvork pikt de pallets op en plaats deze in de opslag. De lengte van de lepels zijn iets langer dan de pallets en hebben een afmeting van 650 mm. De lepels liggen 220 mm uitelkaar, zodat de lepels precies in het midden van de gaten van de pallets liggen. Dit maakt het steken gemakkelijker. De lepels zelf zij 80 mm breed. Omdat er een grote kracht op de lepels komt te staan, bestaat de kans op doorbuiging. Een berekening van de doorbuiging is te vinden in bijlage 7. I.
Lift cilinder De liftcilinder zorgt voor de verticale beweging van de lift. In deze cilinder zit hydraulische vloeistof die zorgt voor een drukverschil om of het geraamte van zich af te drukken of naar zich toe te trekken. Om een zware last te verplaatsen is een
Figuur 20: Uitvergroting van het liftmechanisme

Thema Enkelstukproduct 2 AGV, WH21B2, Eindrapport, 17-1-2014
23
krachtige motor nodig, die de hydraulische cilinders van druk voorziet. Een berekening voor deze motor is te vinden in bijlage 7. II.
Stuurwiel Er is gekozen om gebruik te maken van drie wielen. De twee aandrijf wielen zitten naast het frame en zorgen tevens voor stabiliteit. De aandrijfwielen zijn zo dicht mogelijk bij het zwaartepunt van de last geplaatst, om kantelen te minimaliseren. Het stuurwiel zit tussen de accu’s geplaatst. Dit wiel kan 360 graden rond draaien om de AGV erg wendbaar te maken. In figuur 20 is een uitvergroting van het stuurwiel te zien.
Hierin zitten de volgende onderdelen:
1. Servomotor
2. Motorreductor
3. Wielvork
4. Stuurwiel
5. As
6. Lager
Servomotor De servomotor zorgt ervoor dat het stuurwiel gedraaid kan worden en dat de AGV een bocht maakt.
Motorreductor De motorreductor zorgt voor een goede overbrenging van de servomotor op het wiel. Daarnaast voorkomt het een te hoge radiale belasting of torsiemoment op de servomotor. De motorreductor ziet er in werkelijkheid niet uit als de getekende cilinder. Ook zal er via de
motorreductor een verbinding met het frame gemaakt worden. De as kan blijven draaien door de lager die aan de onderkant van de reductor ingeklemd zit.
Wielvork De wielvork zorgt ervoor dat het wiel vanaf twee kanten bestuurd wordt. Ook houd het de as van het stuurwiel vast.
Stuurwiel Het stuurwiel heeft een diameter van circa 200 mm en een breedte van 60 mm. Het wiel kan vrij bewegen. Door de servomotor kan het wiel draaien wat de sturing realiseert. Ook wordt het stuurwiel daardoor belast. Een
Figuur 21 Uitvergroting van het stuurwiel
Figuur 22 Lager in de motorreductor

Thema Enkelstukproduct 2 AGV, WH21B2, Eindrapport, 17-1-2014
24
berekening op buiging en de bepaling van de as diameter is weergeven is bijlage 7. III. Omdat de wendbaarheid te bepalen is er een berekening gedaan wat betreft de draairadius van de AGV. Dit is te vinden in bijlage 7. IV.
As De as van het wiel zit vast en zal dus niet meedraaien met het stuurwiel. De as is geel weergegeven, maar zal in werkelijkheid niet geel zijn. De as staat onder statische belasting door de lager en de vork. Een berekening op afschuiving die de as ondervindt is te vinden in bijlage 7. V.
Lager Het lager is blauw weergegeven. Het zorgt ervoor dat het stuurwiel kan draaien zonder dat de as rond draait. Hij is ingeklemd tussen het stuurwiel en de as. In de werkelijkheid zal de lager geen blauwe kleur hebben. De lagers worden constant belast en zullen daardoor slijten. Handig is om te weten hoe lang de lagers mee kunnen gaan. Een berekening hiervan is te vinden in bijlage 7. VI.
Aandrijving De aandrijving van de AGV gaat via de twee wielen welke naast het frame geplaatst zijn. De wielen zelf worden aandreven door een tandriem. Een gelijkstroom motor zorgt ervoor dat elektrische energie wordt omgezet in mechanische energie. Deze motor zit verwerkt in het frame. In figuur 23 is een uitvergroting van de aandrijving van de AGV te zien.
Daar uit volgen de volgende onderdelen:
1. Wielen
2. Schijfremmen
3. Kogellager met lagerhuis
4. Differentiaal
5. Riem
6. Gelijkstroommotor
7. Aandrijfas
Figuur 23: Uitvergroting aandrijving

Thema Enkelstukproduct 2 AGV, WH21B2, Eindrapport, 17-1-2014
25
Figuur 24: Afbeelding van een differentieel
Wielen De wielen hebben de volgende afmetingen: Een diameter van 300 mm en een breedte van 60 mm. Deze bevinden zich buiten het karkas van de AGV waardoor er geen aansporing mogelijk is. Deze wielen kunnen vooruit en achteruit draaien, maar geen hoeken maken voor het sturen.
Schijfremmen De schijfremmen zijn bevestigd aan de wielen bij het begin van de as. Deze worden door een hydraulische pomp aangestuurd. Wanneer de AGV moet remmen stuurt de PLC een signaal naar de hydropomp en ventiel die vervolgens de hydraulische pomp.
Kogellager met lagerhuis De kogellager zit in het lagerhuis en zorgt ervoor dat de as kan draaien en voor een verbinding tussen frame en as. Het lagerhuis houdt de kogellager op zijn plaats, de kogellager houd de as op zijn plaats. Er zijn in totaal voor vier lagers gekozen omdat deze constructie ervoor zorgt dat het differentiaal niet op momentkrachten belast wordt. Ook deze lagers ondervinden slijtage. Dit wordt berekend in bijlage 7. VI.
Differentieel De AGV dient naast het rechtdoor rijden ook een bocht te kunnen maken. Hierbij maakt het aandrijfwiel aan de buitenkant van de bocht een langere weg dan het aandrijfwiel aan de binnenkant. Bij montage op één as van wiel tot wiel zou een wiel moeten slippen/glijden over het wegdek om de as niet te verdraaien of te breken. Om deze reden is een differentieel aanwezig in de aandrijflijn. Door middel van kegeltandwielen kan het ene wiel aan de binnenkant van de bocht een minder lange weg afleggen dan het wiel aan de buitenkant van de bocht zonder weg te slippen.

Thema Enkelstukproduct 2 AGV, WH21B2, Eindrapport, 17-1-2014
26
Voor de differentieel-as is een diameter van 40mm aangenomen. Uit vergelijkingen in het boek “Roloff/Matek Machineonderdelen” zijn de overige afmetingen van de kegeltandwielen bepaald. De berekening van het differentiaal staan in bijlage7. VIII.
De differentieel is met bouten bevestigd aan de aandrijf as. Deze bouten worden belast op afschuiving. Dit is berekend in bijlage7. IX.
Riem De overbrenging gebeurd door middel van een riem. Deze verbindt de gelijkstroommotor met de as van de wielen.
Gelijkstroommotor Deze gelijkstroommotor zorgt voor een de aandrijving van de wielen.
Aandrijfas De aandrijfas zorgt ervoor dat de mechanische energie van de motor word overgezet naar de wielen. Om slippen te voorkomen is halverwege de aandrijfas een differentieel geplaatst. Omdat op de aandrijfas wel kracht komt te staan is het mogelijk dat de as doorbuigt. Een berekening hiervan is te vinden in bijIage 7.X. Deze bijlage bevat ook de bepaling van de diameter van de as. De as wordt ook belast op afschuiving. De berekening hiervan is te vinden in bijlage 7. X.

Thema Enkelstukproduct 2 AGV, WH21B2, Eindrapport, 17-1-2014
27
Elektrisch systeem
Aangezien de AGV elektrisch aangestuurd moet worden is er ook een elektrisch systeem ontworpen. Hieronder wordt duidelijk gemaakt hoe dit in zijn werking gaat.
Schematisch wiring diagram Het schematisch wiring diagram geeft een beeld van hoe het elektrisch systeem in de AGV er uit moet komen te zien.
Diagram Het onderstaande diagram geeft een schematische weergave van de elektronica toegepast in en om de AGV. Hoofdzakelijk stuurt een PLC controller alles aan en zorgt voor de omzetting van signalen (input naar output).
De meeste elektrische onderdelen zorgen voor de input van de systeem. Dit kan door middel van knoppen, het scherm en verschillende sensoren. De mechanische onderdelen zorgen voor de output van het systeem. Naast onderdelen die elektrische energie omzetten in mechanische energie, zijn er ook onderdelen die gebruik maken van hydrauliek als energie omzetting. Het is ook mogelijk om de AGV te besturen vanaf een andere plek in de fabriek. Dit geschied door een computer die via Wi-Fi communiceert met de AGV.
Figuur 25: Schematische wiring diagram

Thema Enkelstukproduct 2 AGV, WH21B2, Eindrapport, 17-1-2014
28
3D wiring diagram In het 3d wiring diagram staat aangegeven hoe de hydrauliek verloopt. De aangegeven buizen verbinden de pomp en ventielen met de hydraulische onderdelen.
Figuur 26: 3D wiring diagram hydrauliek
Hieronder is de elektrische bedrading aangegeven.
Figuur 27: Wiring diagram elektrisch (bovenaanzicht)

Thema Enkelstukproduct 2 AGV, WH21B2, Eindrapport, 17-1-2014
29
Figuur 28: Wiring diagram elektrisch (zijaanzicht)
Componenteninventaris De componenteninventaris is een opsomming van alle componenten in de AGV. Er wordt hierbij een verdeling gemaakt tussen de volgende onderdelen: het hoofdsysteem, het motorsysteem, het navigatiesysteem, het veiligheidssysteem, knoppen en displays, het communicatie systeem, het veiligheidssysteem en de hydraulische componenten. Leverancierslijst De meeste componenten worden niet zelf gemaakt maar ingekocht. Een lijst van de componenten en de bijbehorende leveranciers en artikelnummers is hier weergeven, voor zover er al een keuze in gemaakt kon worden.
Component Leverancier Type/artikelnummer DC Motor Adlee Powertronic Co. Ltd. BM-2200E 2200W
Servomotor Conrad 198747 - 89
Servodriver Elmo DC whistle 1/60
Hydropomp Haldex/Concentric W300series
Ventielen Parker RE06M**W2
Snelheidsbegrenzing - -
Nabijheidssensor AE sensors -
Sensor overbelasting AE sensors -
Noodstop IDEC -
Zwaailicht Conrad 591525-89
Scherm Interworld Electronics ADP-1101 Series 10.4”
Knop
Sensor
Begeleiding - -
Accu Victron Energy BAT412201080
PLC Panasonic AFPX-C30RD
Geheugen
Wifi Rockwell Automation PLC-4 EtherNet/IP Interface Module
Transceivers IDEC -
Computer - -
Tabel 2: Leverancierslijst

Thema Enkelstukproduct 2 AGV, WH21B2, Eindrapport, 17-1-2014
30
Hoofdsysteem Het hoofdsysteem bestaat uit een PLC die de verschillende componenten in de AGV met elkaar verbindt.
PLC keuze Input varianten Om te bepalen welke PLC er kan worden gekozen dient er eerst te worden gekeken naar welke varianten zijn. Op het gebied van input wordt er veelal 24Vdc aangeboden. Ac is ook beschikbaar, echter dit komt niet voor in de AGV. Output varianten Op het gebied van output zijn er drie varianten te vinden: Triac, relay en transistor. Triac is een variant die werkt op AC. Om deze reden valt triac output dan ook direct af. De keuze tussen relay en transistor output dient te worden gemaakt op basis van enkele verschillen. Een relay output is geschikt voor zware belastingen en potentiaalvrije schakelingen, waartegen een transistor tot maximaal 24V kan werken. Een transistor heeft als voordeel ten opzichte van een relay dat het geen bewegende onderdelen heeft en dus een langere levensduur. Voor een relay kan uit worden gegaan van een levensduur van 1.000.000 schakelcycli. Benodigde specificaties Door alle input en output signalen bij elkaar op te tellen blijken er 6 inputpoorten en 8 outputpoorten benodigd te zijn. Uit de varianten van de input kan worden geconcludeerd dat de PLC op 24Vdc gaat werken. Voor de output kan worden gekozen voor relay. Hiervoor kan worden gekozen op de volgende redenen;
- De levensduur van 1.000.000 schakelcycli wordt als voldoende geacht voor alle componenten.
- Relay outputs zijn goedkoper dan transistor outputs.
- Niet alle componenten werken op transistor output, maar wel allemaal op relay output.
Er zijn ook mogelijkheden om een combinatie te kiezen van relay en transistor output. Echter wordt hier niet voor gekozen, omdat dit onnodig extra kosten zou meebrengen. Gekozen PLC Er is gekozen voor de Panasonic AFPX-C14RD. Deze heeft een I/O (input/output verhouding) van 8/6, waarvan de output volledig met relay wordt geregeld. De input hiervan is digitaal. Om ook te kunnen voorzien in de analoge input is er gekozen voor de add-on cassette AFPX-A21. Deze heeft zowel vier analoge input- als outputpoorten. Hiermee komt de I/O tot 10/12 waarmee wordt voldaan aan de benodigde capaciteit. Overige specificaties zijn te vinden in Apendix 9.

Thema Enkelstukproduct 2 AGV, WH21B2, Eindrapport, 17-1-2014
31
Aansluiten van de subsystemen aan de PLC Alle binnenkomende signalen moeten verwerkt worden door een centraal systeem. In dit geval is dit een PLC. De PLC zorgt hierna voor een signaal naar de besturing, zodat de koers van AGV veranderd kan worden.
Magnetische Tape: Er moet een ontvanger komen, deze krijgt alle signalen binnen die de sensoren opvangen. Dit signaal moet doorgestuurd worden naar de PLC zodat gecontroleerd of de AGV de goede kant op gaat. De ontvanger krijgt geen feedback terug, er loopt dus alleen een signaal van de ontvanger naar de PLC. De ontvanger moet wel aangesloten worden op een accu. Een groot voordeel van dit systeem is het lage verbruik, er zijn producten gevonden die werken op 20mA bij een Voltage van 10 tot 30 Volt.
De ontvanger zelf werkt doormiddel van meerdere sensoren die hun signaal doorsturen naar een processing unit die uitrekent waar precies het midden van de draad is. Dit signaal wordt daarna doorgestuurd naar de output, in dit geval een PLC.
Figuur 29: Magnetische ontvanger
Laser: Het laser systeem heeft net als de magnetische ontvanger alleen een signaal richting de PLC. De metingen die de laser doet worden doorgegeven aan de PLC, deze kan daarmee precies bepalen op welke locatie de AGV zich bevindt.
Enige input is de stroom toevoer. Een gevonden voorbeeld zoals de laserscanner (bijlage 8. VI)Figuur 58: Laser scanner is te zien dat deze werkt bij 0.6 Ampère op een Voltage van 18 tot 36 Volt.
Overige subcomponenten: Alle subcomponenten worden in bijlage 8 weergegeven. Denk hierbij aan motoren, sensoren en het hydraulische systeem.

Thema Enkelstukproduct 2 AGV, WH21B2, Eindrapport, 17-1-2014
32
Communicatie systeem De communicatie van de AGV met de buitenwereld is belangrijk omdat de AGV hier vaak mee aangestuurd zal worden. Bij dit systeem wordt er gebruik gemaakt van een hoofdcomputer met bijbehorende modules voor de verbinding en transceivers.
Hoofdcomputer De centrale computer zal bestaan uit server met genoeg rekenkracht om een aantal AGV’s aan te sturen. Deze computer zal ook de navigatie van de AGV uitrekenen.
Op basis van een Warehouse management system, een systeem dat veel gebruikt wordt in opslagruimtes, weet de computer op elk moment waar alle goederen zich bevinden in de fabriekshal. De computer geeft hierop opdrachten aan de AGV.
Specificaties van een computer als deze zijn lastig te geven. Omdat er veel opties in rekenkracht, opslag en netwerkverbindingen zijn kan dit een erg uitgebreid server station worden.
Naast de feedback van de AGV’s zullen hier ook de noodsignalen en oproep opdrachten van de operators binnen komen.
Verbinding De AGV moet autonoom kunnen opereren binnen de fabriekshal. De AGV krijgt hiervoor opdrachten van een centrale computer. Ook zorgt de computer ervoor dat de AGV ‘weet’ waar in de fabriekshal hij heen moet. Om niet vast aan kabels te zitten, is er gekozen voor een draadloos systeem. Er bestaan hiervan verschillende varianten, zoals Wi-Fi Bluetooth en Infrarood. Infrarood heeft namelijk een direct contact nodig tussen de ontvanger en verzender. Dit houdt in dat deze twee elkaar moeten kunnen ‘zien’. Wi-Fi en Bluetooth hebben dit beide niet. Een groot verschil tussen deze twee is dat Bluetooth bedoeld is voor korte periodes. De snelheid van Wi-Fi is inmiddels ook al vele male hoger dan dat van Bluetooth. Daarom is Wi-Fi hierin veruit de favoriet.
Wi-Fi Een draadloos ethernet netwerk, of Wi-Fi, is tegenwoordig de standaard op het gebied van draadloze verbindingen. Vrijwel alle laptops, telefoons en tablets zijn hiermee uitgerust. Op de industriële markt is Wi-Fi nog niet zo prominent aanwezig, mede doordat de betrouwbaarheid soms te wensen over liet.
Tegenwoordig zijn de netwerken zo stabiel en snel dat dit geen problemen zal opleveren om dit te gebruiken in de fabriekshal.
Opzetten Netwerk De radiogolven van het Wi-Fi signaal kunnen niet door beton en metaal doordringen, dit zorgt ervoor dat er een ‘site survey’ gehouden moet worden. Hiermee wordt een beeld gemaakt van de fabriekshal en alle stellingen. Door het Wi-Fi signaal te meten op deze plaatsen worden alle zwakke plekken gevonden. Op deze plaatsen kunnen extra accespoints gezet worden, zodat de dekking van het netwerk verbeterd wordt. Door middel van meerdere toegangspunten kan de AGV roamen en blijft de AGV altijd binnen bereik van het netwerk.

Thema Enkelstukproduct 2 AGV, WH21B2, Eindrapport, 17-1-2014
33
Wi-Fi module PLC Wi-Fi of ethernet is geen standaard op PLC’s. Er moet dus een uitbereiding komen op de PLC. Er zijn hiervoor verschillende opties. Er bestaan Ethernet (vaste internet verbinding) kaarten die op de PLC aangesloten kunnen worden. Om de PLC daarna met een computer te verbinden is een netwerk switch nodig. Deze zet het signaal om in een Wi-Fi signaal.
Voor de aansluiting op de PLC is alleen een extensioncard nodig met een omzetting naar Wi-Fi. Dit zorgt voor communicatie naar beide kanten. De centrale computer krijgt en stuurt dus signalen van de PLC. De benodigde stroom is ongeveer 1 Ampère bij 5 Volt.
Figuur 30: Voorbeeld van de werking
Snelheid Wi-Fi Doordat de AGV in een constante verbinding moet staan met de centrale computer is een hoge snelheid nodig. Zo stuurt de laser een aantal keer per seconden de gegevens door die het opmeet. Een inschatting geven van de benodigde snelheid is lastig. Tegenwoordig kan een Wi-Fi module tot 1000Mbit ondersteunen. Dit zorgt voor een snelheid van 125 MB/s. Dit is voor de meest veeleisende systemen genoeg, daarom zal de AGV hier ook ruim mee uit de voeten kunnen.

Thema Enkelstukproduct 2 AGV, WH21B2, Eindrapport, 17-1-2014
34
Transceivers
Om de AGV handmatig op te roepen voor speciale gevallen, zoals een spoedklus, bevinden zich oproep knoppen in de fabriekshal. Deze zullen op vaste plekken in de fabriekshal staan. De operator kan hierdoor handmatig de AGV oproepen die idle of het dichtstbij is. Op de AGV kan de operator zelf zijn opdrachten invoeren. Er is dus op een aantal logisch gekozen punten een knop geplaatst. Bovendien bevindt zich bij deze knop een noodstop, zo kunnen alle AGV’s in geval van nood direct stilgelegd worden. Deze knoppen moeten uiterst betrouwbaar zijn en zullen daarom met een vaste kabel gelegd worden. Dit is ook een kostenbesparende oplossingen, er hoeft namelijk geen wireless module gemaakt te worden. Slechts een signaal naar een centraal punt zal ervoor zorgen dat de centrale computer de opdracht uit kan voeren. In de case staat beschreven dat de fabriekshal van ongeveer 80 bij 50 meter is. Er is ervoor gekozen om in elk pad om de 10 meter een knopmodule neer te zetten. Er bevindt zich dus een noodstopschakelaar en oproep functie in deze module. Er zijn eventueel nog extra functies gewenst, welke later nog toegevoegd kunnen worden.
Figuur 31: Knoppen overzicht
Er zijn 23 knopmodules, hoewel dit erg veel lijkt, kosten deze onderdelen vrij weinig. Ze verhogen de veiligheid van de hal daarentegen enorm. Deze knoppen werken net als een lichtknop. Het is ook meteen duidelijk waar precies een probleem in de fabriek is.
Het oproepen van de AGV’s zal door de centrale computer geregeld worden. Er zal bijvoorbeeld, afhankelijk van de locatie, gekozen worden voor een AGV die al dichtbij is, of voor een AGV die net klaar is met zijn vorige opdracht. De operator kan na afloop de AGV de opdracht geven om de volgende opdracht van de centrale computer op te volgen.

Thema Enkelstukproduct 2 AGV, WH21B2, Eindrapport, 17-1-2014
35
Conclusies
Naar aanleiding van dit rapport kunnen meerdere conclusies getrokken worden. De AGV moest aan bepaalde eisen voldoen, zoals vermeld in het pakket van eisen. Aan al deze eisen is voldaan. De AGV kan een last van 10000N dragen en liften, zoals in de case gesteld. Ook kan hij over de paden door de tandwielfabriek rijden. De AGV is doorgerekend en zal niet bezwijken onder de krachten die optreden. Tevens zal de AGV niet kantelen wanneer deze op maximale snelheid door een bocht gaat. De motoren zijn sterk genoeg om de AGV voort te bewegen met de juiste snelheid, evenals de hydraulische pomp voor het liftmechanisme en de remmen. Daarnaast zal de AGV snel genoeg stilstaan wanneer een object of persoon gedetecteerd wordt.
Deze conclusies zijn allemaal getrokken aan de hand van berekeningen en simulaties. Er is geen prototype gemaakt om de berekeningen te bevestigen.

Thema Enkelstukproduct 2 AGV, WH21B2, Eindrapport, 17-1-2014
36
Bijlagen

Thema Enkelstukproduct 2 AGV, WH21B2, Eindrapport, 17-1-2014
37
1. Planning Deze planning geeft een weergave van het ontwerpproces van de AGV. Het is op te delen in drie fases, deze zijn als volgt:
1. Probleem definiëring 2. Werkwijze bepaling 3. Vormgeving vastleggen
Hieronder volgt voor elke fase een beknopte beschrijving.
Probleem definiëring In de eerste fase van het ontwerpproces wordt het probleem gedefinieerd. Hierin worden alle eisen en alle wensen opgenoemd en onder elkaar gezet. Onderscheid wordt gemaakt tussen vaste eisen en variabele eisen. De probleem definiëring zal plaats vinden in het plan van aanpak. De definitieve versie van dit rapport zal aan het einde van week twee worden ingeleverd.
Werkwijze bepaling In de tweede fase zal de werkwijze bepaald worden. Er zijn verschillende manieren om te voldoen aan de eisen die gesteld zijn. Deze worden op een rijtje gezet in een morfologisch overzicht. Ook zullen er structuurschetsen volgen aan de hand van het morfologisch overzicht. Met behulp van verschillende weegfactoren zal de beste configuratie voor de AGV bepaald worden. Deze fase zal in twee rapporten voortkomen: het oriëntatierapport en het conceptrapport. Het oriëntatierapport zal de verkenning van de verschillende mogelijkheden weergeven, met daarbij een morfologisch onderzoek. In het conceptrapport zal de definitieve keuze gemaakt worden. Deze deadline ligt in week vier.
Vormgeving vastleggen In de derde en laatste fase van het ontwerp zal de vormgeving vastgelegd worden. Een beschrijving van de verschillende aspecten van de AGV zal gemaakt worden. Dit gebeurt aan de hand van een schema, tekeningen of een stuklijst. Met behulp van deze gegevens zal een sterkteberekening gemaakt worden, waarna de materiaalkeuze gemaakt kan worden. Alle constructietekeningen zullen samenkomen in het Technisch Product Dossier. Dit alles wordt samengesteld in het eindrapport, deze zal in week zeven worden ingediend.

Thema Enkelstukproduct 2 AGV, WH21B2, Eindrapport, 17-1-2014
38
2. Planning (MS Project)
Figuur 32: MS Project planning WH21.B2

Thema Enkelstukproduct 2 AGV, WH21B2, Eindrapport, 17-1-2014
39
3. Werkplan Het project ‘Thema enkelstukproduct 2’ duurt negen weken. Op het moment dat
dit werkplan wordt samengesteld is het de tweede week. In het werkplan zal er
meer ingegaan worden op de in te leveren rapporten, dan op de verschillende
ontwerpfases.
In tabel 4 is een overzicht te zien van de deadlines, verdeeld over de negen weken.
Hieronder zullen al deze deadline de revue passeren met de nodige toelichting.
Oriëntatierapport In dit rapport zal de verkennende fase van dit project worden weergegeven. Hierin
zal vooral veel onderzoek gedaan worden naar de verschillende onderdelen van de
AGV. Verwacht wordt dat dit binnen één week gedaan kan worden. De
verschillende aspecten van de AGV worden verdeeld onder de projectleden. Aan de
hand van dit rapport kunnen er keuzes gemaakt worden, waarbij de samenstelling
van de AGV gevormd wordt.
Conceptrapport Dit is het laatste rapport in de werkwijze bepaling. Het meest efficiënte ontwerp
wordt gekozen aan de hand van verschillende weegfactoren. Het conceptrapport
geeft de tussenstand aan na vier weken. Wederom zullen de taken verdeeld
worden. In deze periode zal ook begonnen worden aan de aanvullende opdracht.
Deze zal uitgevoerd worden door twee personen binnen de groep. De behoefte
bestaat om hier de deadline te vervroegen, zodat de weekopbouw beter aansluit
met de deadlines. Hierdoor zal minder tijd verloren gaan door onwetendheid.
Technisch Product Dossier In dit dossier staan ontwerptekeningen en detailtekeningen van het ontwerp, met
bijbehorende tekeningen. De afgelopen weken is hier al de basis van gelegd, echter
zal de vormgeving zich nu in een afrondend stadium bevinden. Echter één week de
nadruk op het TPD te leggen, zorgt ervoor dat de detailuitwerking hard vooruit
gaat. Wanneer de deadline vervroegd is, houdt de groep alsnog één week aan,
zodat de voorsprong behouden blijft.
Week 1 2 3 4 5 6 7 8 9
Oriëntatierapport x
Conceptrapport x
Technisch Product Dossier
x
Eindrapport x
Presentatie x
Tabel 3: Overzicht deadlines
Thema Enkelstukproduct 2 AGV, WH21B2, Eindrapport, 17-1-2014
40
Eindrapport De laatste twee weken wordt naar het eindrapport toegewerkt, eventueel is er een
halve week extra door de ingehaalde tijd. Het definitieve ontwerp wordt tot in
detail uitgewerkt en productie klaar gemaakt. De hele groep zal met elkaar werken
naar het eindrapport. Ook het TPD zal hierin terugkomen, evenals de aanvullende
opdracht.
Presentatie Ter afronding zal de groep zijn ontwerpkeuze onderbouwen met een presentatie.
Dit zal uitgevoerd worden door de voorzitter en nog één persoon. Na de presentatie
zal de verdediging plaatsvinden. Deze afronding vindt plaats in week negen, echter
zal er in week acht minder aandacht voor zijn, door de tentamens.

Thema Enkelstukproduct 2 AGV, WH21B2, Eindrapport, 17-1-2014
41
4. De Automatic Guided Vehicle Een Automatic Guided Vehicle (AGV) is een robot die in een fabrieksomgeving een lading kan transporteren. Dit kan bijvoorbeeld plaatsvinden in een fabriekshal, magazijn of een laad/los station.
Varianten Omdat de toepassingen van een AGV erg divers zijn bestaan er veel varianten. Veel AGV’s worden daarom ook op maat gemaakt voor de klant. Zo heeft elke industrie zijn specifieke eisen en regels. Een aantal varianten die vaak voorkomen:
Laadvoertuig Deze voertuigen worden gebruikt voor het laden en lossen van goederen door middel van een laaddek. De AGV kan hierdoor automatisch goederen van het ene fabrieksdeel naar het volgende brengen. Hier zal ons project zich op richten.
Figuur 33 :Laadvoertuig
Trekker De AGV trekt zijn lading voort als een trein. De lading wordt hiervoor op rijdende opslagrekken geplaatst.
Figuur 34: Trekker
Vorkheftruck Deze AGV kan ladingen op verschillende hoogte niveaus laden en lossen. Dit is handig voor het opslaan van goederen in een groot magazijn.
Figuur 35: Vorkheftruck
Thema Enkelstukproduct 2 AGV, WH21B2, Eindrapport, 17-1-2014
42
Toepassingen In de verschillende stappen in een fabriekshal kunnen AGV worden ingezet. Veelvoorkomende toepassingen:
1. Aanvoer van materiaal: De AGV’s leveren in de diverse bewerkingsstappen de goederen die nodig zijn.
2. Transport intern: De AGV’s transporteren de halffabricaten naar de volgende
bewerking of opslag.
3. Transport extern: De AGV’s laden vrachtwagens met goederen.
Dit concept zal moeten voldoen aan het interne transport en de aanvoer van materiaal.
Om een AGV zijn weg te laten vinden door de fabrieksomgeving zijn er verschillende oplossingen. Hierbij komt meer kijken dan alleen navigeren. Een AGV moet namelijk ook rekening houden met de werknemers en de andere AGV’s. De aansturing van een AGV is erg divers en kan aan de verschillende eisen van een klant worden aangepast.

Thema Enkelstukproduct 2 AGV, WH21B2, Eindrapport, 17-1-2014
43
5. Methodisch ontwerpen
Kesselring methode Door gebruik te maken van de Kesselring methode worden de samengestelde concepten beoordeeld op de eisen die gesteld zijn op het gebied van gebruik en fabricage. De Kesselring methode is beoordeeld alle verschillende onderdelen van de concepten met een cijfer. Als eerste zal de weegfactoren bepaald worden.
M Bet S O A U V Bew G
Motor X 1 0 1 0 1 1 1 0
Betrouwbaarheid 1 X 0 1 0 0 1 1 0
Snelheid 1 1 X 1 1 1 1 1 0
Onderhoud/opladen 0 1 0 X 0 0 1 1 0
Aanpasbaarheid 1 1 0 1 X 1 1 1 0
Uitvoering 0 1 0 1 0 X 1 1 1
Veiligheid 0 0 0 0 0 0 X 0 0
Beweeglijkheid 0 0 0 0 0 0 1 X 0
Grenzen 1 1 1 1 1 0 1 1 X
Totaal: 4 6 1 6 2 3 8 7 1
Tabel 4: Weegfactor bepaling van eisen voor gebruik
Uit tabel 2 blijkt wel dat de factoren veiligheid, beweeglijkheid, betrouwbaarheid en onderhoud het zwaarst wegen. Deze factoren zullen waarschijnlijk het verschil maken.
Eisen voor gebruik Cijfer
Concept: Weegfactor: 1: Rood 2: Groen Ideaal
1 Motor 4 (4)16 (4)16 (4)16
2 Betrouwbaarheid 6 (3)18 (4)24 (4)24
3 Snelheid 1 2 2 4
4 Onderhoud/opladen 6 (3)18 (3)18 (4)24
5 Aanpasbaarheid 2 (3)6 (2)4 (4)8
6 Uitvoering 3 (3)9 (2)6 (4)12
7 Veiligheid 8 (4)32 (3)24 (4)32
8 Bewegelijkheid 7 (3)21 (3)21 (4)28
9 Grenzen 1 3 3 4
Totaal A 125 118 152
% A 82 78 100 Tabel 5: Eisen voor gebruik

Thema Enkelstukproduct 2 AGV, WH21B2, Eindrapport, 17-1-2014
44
Hetzelfde wordt herhaald voor de eisen van fabricage
For K S Fab O
Formaat X 1 0 1 1
Kosten 0 X 0 0 0
Serieproduct 1 1 X 1 1
Fabricagemethode 0 1 1 X 1
Onderdelen 0 1 0 0 X
Totaal 1 4 1 2 3
Tabel 6: Weegfactor bepaling van eisen van fabricage
Vooral de kosten en de onderdelen zijn erg van belang volgt uit tabel 4
Door de gegevens uit de vorige tabellen in een grafiek te plotten kan er een beeld worden geschetst van het meest gewenste resultaat. Op de assen komen de gebruiks- en fabricage eisen te staan, uitgedrukt in procenten.
Figuur 36: Visualisatie Kesselring methode
0
10
20
30
40
50
60
70
80
90
100
0 10 20 30 40 50 60 70 80 90 100
Fab
rica
ge %
-->
Functioneel % -->
Concept Rood
Concept Groen
Eisen van fabricage Cijfer
Weegfactor: 1: Rood 2: groen Maximum
1 Formaat 1 3 3 4
2 Kosten 4 (3)12 (2)8 (4)16
3 Serieproduct 1 3 3 4
4 Fabricagemethode 2 (2)4 (3)6 (4)8
5 Onderdelen 3 (4)12 (3)9 (4)12
Totaal B 34 29 44
% B 77 66 100 Tabel 7: Eisen van fabricage

Thema Enkelstukproduct 2 AGV, WH21B2, Eindrapport, 17-1-2014
45
6. Overzicht AGV Om de berekeningen beter te begrijpen, wordt er eerst een overzicht gegeven van de AGV.
Exploded view Om een beter inzicht te krijgen in wat er allemaal in de AGV zit, is er een exploded view gemaakt. Dit zorgt ervoor dat goed te zien is wat de hoofdcomponenten van de AGV zijn en op welke plek ze horen. De blauwe lijnen wijzen naar de oorspronkelijke plek van het onderdeel. In de volgende hoofdstukken worden de componenten verder uitgelicht.
Figuur 37: Exploded view AGV

Thema Enkelstukproduct 2 AGV, WH21B2, Eindrapport, 17-1-2014
46
Frame In Inventor is een statische analyse gemaakt. Getracht is deze gewichten zo evenredig mogelijk te verdelen op de te belasten punten. Er is uitgegaan van het totale gewicht van de AGV inclusief lading. Dit is natuurlijk een benadering van de werkelijke situatie.
Figuur 38 Statische analyse
Hieruit is op te maken dat de maximale vervorming 1,82 mm is, het rode gedeelte. Dit zal vooral toetreden wanneer er een maximale last van 1000N op de liftvork wordt uitgeoefend wordt.
Voor de balken in het frame zijn de volgende afmetingen gekozen: 100x100x5. Deze grootte is gekozen aangezien het stevig genoeg en de montagevrijheid vergroot. Aan deze balken kunnen gemakkelijk onderdelen en andere balkconstructies bevestigd worden. In bijlage 7.VII wordt de framedoorberekening gegeven.

Thema Enkelstukproduct 2 AGV, WH21B2, Eindrapport, 17-1-2014
47
7. Berekeningen
I. Doorbuiging lepels Om de doorbuiging van de lepels te bepalen wordt een berekening gemaakt van de stijfheid. De maximale belasting van de AGV is op 10 kN gezet.
Figuur 39:Schematische weergave doorbuiging lepels bij enkele inklemming.
Formule voor doorbuiging 4
8B
qL
EI , met
B de doorbuiging van de balk in [mm].
q Is het aantal Newton per millimeter [N/mm].
L is de lengte van de balk in [mm].
E is de elasticiteitsmodulus van het materiaal van de lepels, gegeven in [N/mm2].
I is de traagheidsmoment van de balk, gegeven in [mm4].
Met het gebruik van een aantal standaard waardes voor de lepels zijn de volgende afmetingen bedacht, (lxbxh) zijn 600x80x20. Hiermee is gelijk het
traagheidsmoment te berekenen volgens 3112
AB waarin A de lengte van de
doorsnede is en B de dikte. Invullen geeft
[ ] E is
materiaal afhankelijk, voor onbewerkt staal is dit 2.1·105 [N/mm2]. q is de totale lading gelijk verdeeld over de lengte van de lepels. Omdat de heftruck 2 lepels heeft, moet hier ook rekening mee gehouden worden. Zo wordt q 10.000N / 600 mm = 16.7 [N/mm]. Nog een keer delen door 2 geeft de belasting per lepel = 8.35 [N/mm]. Invullen van deze gegevens in formule voor doorbuiging geeft:
[mm].
Bij een volledig evenredige verdeling van de lading van 10kN, dan zullen de lepels maar 0.97 mm doorbuigen. Als eis was gesteld dat dit niet meer zou zijn dan 10mm. Met deze eigenschappen valt dit dus prima binnen de marge.

Thema Enkelstukproduct 2 AGV, WH21B2, Eindrapport, 17-1-2014
48
Er zijn geen problemen met het plastisch vervormen van de lepels van de AGV, omdat de buiging ruim onder de vloeigrens blijft, de grens voor het plastisch vervormen.
Ook is er gekeken naar de mogelijkheid of de lepels kunnen door knikken in het L profiel dat gebruikt wordt. Knik vindt plaats bij een plotselinge kracht, een impuls, of bij beschadigingen, zoals krassen in de hoekpunten. Omdat er geen spraken is van een impuls, de AGV zal immers de lading rustig van de grond tillen en neerzetten, zal knik hierdoor geen probleem zijn. Er moet echter wel goed geinspecteerd worden of er geen diepe krassen in het hoekpunt te zien zijn. Deze scheuren zorgen voor een zwak punt, belasten zou ervoor kunnen zorgen dat de lepels scheuren.
Figuur 40: L profiel van de lepels

Thema Enkelstukproduct 2 AGV, WH21B2, Eindrapport, 17-1-2014
49
II. Hefkracht Mast Om ervoor te zorgen dat de last op de lepels ook omhoog kan worden gebracht, om deze in een stelling te plaatsen, moet de kracht bepaald worden die hiervoor nodig is. De motor die hiervoor moet zorgen heeft een bepaald vermogen nodig. Ook komt er veel kracht op de kettingen te staan die ervoor zorgen dat de lepels omhoog gebracht worden. Hiervoor moet de trekkracht bepaald worden. Het principe hiervoor is hetzelfde als dat van de overbrenging van een fiets. Twee tandwielen met daartussen een ketting. De aandrijving op de as wordt geleverd door een elektromotor. Het vermogen voor deze elektromotor kan bepaald worden door middel van de volgende formule.
[ ]
Hierin is v de snelheid waarmee de kracht omhoog zal worden getild. F is de kracht die omhoog wordt getild. Gegeven door het te tillen gewicht maal de zwaartekrachtsversnelling g.
De waarden die bepaald zijn, staan nog niet helemaal vast, dit kan komen door het aanpassen van Inventor ontwerp. In grote lijnen zal dit geen grote verschillen opleveren, maar dient genoemd te worden. De waarden die hiervoor gebruikt zijn, zijn gegeven in de volgende tabel.
Gewicht (m) 1200 kg
Zwaartekrachtsversnelling (g) 9.81 (constante) m/s2
Snelheid (v) 1 m/s
Hieruit komt een vermogen van .
Om de trekkracht in de kettingen te berekenen is ook de diameter van het tandwiel nodig. Deze zijn pas goed uit te rekenen m.b.v. alle gegeven, daarbij ook de gegevens van ketting (aantal schakels, lengte ketting, aantal tanden op het tandwiel) . Omdat er gewerkt zal worden met gekochte tandwielen is dit vaak in combinatie te koop. Hiervoor is alleen de diameter van de tandwielen van belang en de trekkracht in de ketting. Er wordt gewerkt met twee kettingen, zodat de trekkracht evenredig verdeeld wordt. De trekkracht wordt in principe gehalveerd.
Het is in dit stadium nog niet mogelijk een trekkracht in een ketting te bepalen, omdat deze van teveel factoren afhangt. Er is bijvoorbeeld een berekening nodig voor de veerconstante (hoe klein deze invloed ook is) van de kettingen. De spanning waarop de kettingen geplaatst zijn, dus de afstand tussen de tandwielen en de lengte van de ketting. Als een ketting strakker gespannen staat, dan komt hier meer druk op te staan. Met een slappe ketting loop je het gevaar op een slippend tandwiel, wat in de AGV tot ernstige fouten zou kunnen leiden.
Om toch tot een antwoord te komen is er gekeken naar vergelijkbare elektromotoren met eenzelfde vermogen. Er is gekeken naar motoren met een vermogen van 12 kW oftewel 17 PK. Er is een schakelgrootte van 27 mm gevonden met een lengte van 80 mm. Hoewel dit in verre niet betrouwbaar en bruikbaar is voor dit ontwerp geeft het wel een goede indicatie van waar op gerekend kan worden.

Thema Enkelstukproduct 2 AGV, WH21B2, Eindrapport, 17-1-2014
50
III. Bepaling as-diameter en buiging voor het stuurwiel Om er zeker van te zijn dat de constructie van het stuurwiel het niet begeeft onder de belasting dient de dikte van de as berekend te worden. Daarnaast moet er worden gecontroleerd of het wiel nergens tegenaan komt door het buigen van de as. Om dit te controleren dient er ook een buigingsberekening te worden gedaan. Beide berekeningen worden gemaakt op basis van S235JR.
Er wordt begonnen met de berekening van de diameter van de as. De minimale diameter van de as wordt met behulp van de volgende formule (uit Rolof Matek) bepaald;
√
Met: Ka: veiligheidsfactor = 1,25 (tabel 3-5) σb : buigspanning in [Pa] = 180MPa (tabel 1-1)
Hiertoe dient eerst het buigend moment (M) te worden bepaald;
Met: P: Belasting in [N] = 5722.5N L : Lengte van de as in [m] = 0,1m
Hieruit volgt dat;
Invullen van de formule geeft;
√
Hieruit kan worden geconcludeerd dat de minimale diameter van de as 25.1 mm bedraagt. De veiligheidsfactor is een afgeronde factor, waardoor de berekening nu net boven de 25 mm uitkomt. Het verschil is echter procentueel zo klein dat er voor een as van 25 mm in diameter kan worden gekozen.
Nu de te gebruiken diameter bekend is kan de buiging van deze as worden berekend. De buiging wordt bepaald aan de hand van de volgende formule;
[ ]
Met: E: elasticiteitsmodulus in [Pa] = 190 GPa
Hiertoe dient eerst het massatraagheidsmoment te worden bepaald;
Met:

Thema Enkelstukproduct 2 AGV, WH21B2, Eindrapport, 17-1-2014
51
r: radius van de as in [m]= 0,0125 De massa van de as wordt als volgt bepaald;
Met: ρ : dichtheid in [kg/m3] = 8000kg/m3
Invullen van de formule geeft;
Door het invullen van de massa in de formule wordt het volgende massatraagheidsmoment bepaald;
Tot slot kan door het invullen van het massatraagheidsmoment de buiging worden bepaald;
Deze doorbuiging is erg klein en zal voor geen problemen zorgen.

Thema Enkelstukproduct 2 AGV, WH21B2, Eindrapport, 17-1-2014
52
IV. Draairadius AGV Voor de berekening van de draairadius, wordt er eerst gekeken naar het draaipunt van de AGV. Dit bevindt zich onder de één van de aandrijfwielen, aangezien deze niet meedraaien bij het maken van een bocht. Daarna wordt er gekeken naar het verste punt vanaf het draaipunt. Dat is de uiterste tegenovergestelde hoek van het frame (zie ook figuur 10).
De dikte van de banden zijn 60 mm en het vierkante frame is 70x70. Hieruit volgt de volgende berekening:
√( ) ( )
Figuur 41: Draairadius AGV bovenaanzicht

Thema Enkelstukproduct 2 AGV, WH21B2, Eindrapport, 17-1-2014
53
V. Afschuiving as stuurwiel De lagering is in het stuurwiel geplaatst. Dit zorgt voor een statisch belasting van de as door het stuurwiel en vork.
F: afschuifkracht op as [N] M: massa op voorwiel (bij gelijke verdeling van de massa over drie wielen [kg] g: gravitatieconstante [N/kg]= 9,81 N/kg A: doorsnede as [m2]
Toelaatbare afschuifspanning
Re: Rekgrens [Pa] = 235 MPa fτ: veiligheidsfactor = 0.58
De as is voldoende bestand tegen afschuiving.

Thema Enkelstukproduct 2 AGV, WH21B2, Eindrapport, 17-1-2014
54
VI. Lager berekeningen De lagers die in de AGV komen hebben een bepaalde levensduur. Het doel van deze berekeningen is de levensduur te bepalen, zodat de opdrachtgever weet hoe lang een lager maximaal meegaat, zodat het tijdig vervangen kan worden.
De AGV bevat drie wielen, waarvan twee aangedreven wielen en één stuurwiel. Voor de lagerberekeningen is uitgegaan van een totale belasting van 17.2kN, gelijkmatig verdeeld over de drie wielen. Op elk wiel komt dus een kracht te staan van 5.7kN.
Er zijn alleen berekeningen gemaakt voor de lagers in de wielen, omdat deze lagers de grootste belasting krijgen. In het pakket van eisen is vastgesteld dat de levensduur van slijtage gevoelige onderdelen minimaal 3 maanden bedraagt, deze lagers vallen hieronder. De AGV wordt maximaal 40 uur per week gebruikt, dus ongeveer 160 uur per maand.
Voor deze berekeningen is gebruikgemaakt van zowel het theorieboek als het tabellenboek van Roloff/Matek. Daarnaast is ook de catalogus van SKF gebruikt voor kentallen en afmetingen van de specifieke lagers. Voor alle wielen zijn diepgroefkogellagers gebruikt, deze kunnen vooral radiale krachten opvangen. Dit zijn ook de krachten die optreden in deze lagers.
Er zijn bepaalde types lagers gekozen, hierbij is gekeken naar de buitendiameter van de betreffende as. Deze diameter is bepaald uit berekeningen.
Algemene lagerberekening
(
)
Met:
L10: levensduur lager [106 omw/min] C: dynamisch draaggetal volgens SKF [kN] P: lagerbelasting [kN] p: Coëfficiënt (3 voor diepgroefkogellagers) [-] L10h: levenduurs lager [urenbedrijf] n: toerental lager [omw/min]

Thema Enkelstukproduct 2 AGV, WH21B2, Eindrapport, 17-1-2014
55
Lagerberekening aandrijfas
Figuur 42: VLS-diagram aandrijfas
De krachten links van het differentieel zijn even groot als de krachten rechts van het differentieel. Voor de berekening wordt alleen naar de krachten links van het differentieel gekeken.
Met:
FN: normaalkracht op wiel [N] SV: veiligheidsfactor = 1.5 (tabel 3.14) m: massa [kg] g: gravitatieconstante [N/kg]
Bij kogellager 2, vanaf links gezien, is de som van momenten 0 ->

Thema Enkelstukproduct 2 AGV, WH21B2, Eindrapport, 17-1-2014
56
Kogellager1 dynamisch draaggetal bepalen
(
)
[ ]
P: kracht op lager = Fk1 p: levensduur component (groefkogellagers p = 3) C: dynamisch draaggetal
C √
√
Type kogellager1 bepalen
Totale levensduur kogellager 1 bepalen
(
)
P: kracht op lager = 12.876 kN p: levensduur component (groefkogellagers p = 3) C: dynamisch draaggetal = 12.7 kN
(
)
[ ]
[ ]
Deze lagers worden ongeveer 160 uur per maand gebruikt, hieruit valt te concluderen dat deze lagers 5 maanden meegaan. Dit kan meegenomen worden in het onderhoudsplan.
Kogellager2 dynamisch draaggetal bepalen
(
)
[ ]
P: kracht op lager = FK2
p: levensduur component (groefkogellagers p = 3) C: dynamisch draaggetal
√
√
Type kogellager2 bepalen
Totale levensduur kogellager 1 bepalen
(
)
P: kracht op lager = 8.58 kN p: levensduur component (groefkogellagers p = 3)

Thema Enkelstukproduct 2 AGV, WH21B2, Eindrapport, 17-1-2014
57
C: dynamisch draaggetal = 12.7 kN
(
)
[ ]
[ ]
Deze lagers worden ongeveer 160 uur per maand gebruikt, hieruit valt te concluderen dat deze lagers 5 maanden meegaan. Dit kan meegenomen worden in het onderhoudsplan. Lagerberekening stuurwiel
Voor het stuurwiel wordt gebruikgemaakt van dezelfde formules. Het stuurwiel vangt ook 5.7kN op, welke wordt verdeeld over twee diepgroefkogellagers.
Gegevens:
Lagertype: diepgroefkogellager DIN 625 SKF 61905 C=7.02kN (volgens SKF) P=2.85kN p=3 (kogellager) Diameter d=0.15m Omtrek=π*d vAGV=1m/s
(
)
(
)
[
]
[ ]
De lagers worden ongeveer 160 uur per maand gebruikt, hieruit valt te concluderen dat deze lagers 12 maanden meegaan. Dit kan meegenomen worden in het onderhoudsplan.

Thema Enkelstukproduct 2 AGV, WH21B2, Eindrapport, 17-1-2014
58
VII. Frame berekening
Vloeigrens bepaling schuine staaf en veiligheidsfactor Doel: vaststellen van de veiligheid van de schuine staaf in het frame.
Figuur 43:VLS frame liftdeel
√
A: oppervlak [m2] σ: spanning [Pa] Materiaal E335
SV: veiligheidsfactor
Conclusie: veiligheidsfactor is voldoende
Vloeigrens bepaling aanhechtingspunt schuine staaf Uit bovenstaande berekening blijkt de spanning in de doorsnede 211MPa te zijn. De aanhechting tussen de schuine staaf en het verticale frame heeft een groter oppervlak. De spanning in dit oppervlak is dus lager dan de doorsnede van de schuine staaf. Dit resulteert in een grotere veiligheidsfactor.
Bepaling spanning hoekpunt Doel: Vaststellen van de veiligheid van de schuine staaf in het frame.

Thema Enkelstukproduct 2 AGV, WH21B2, Eindrapport, 17-1-2014
59
Materiaal S185
SV: Veiligheidsfactor
Conclusie: veiligheidsfactor is voldoende

Thema Enkelstukproduct 2 AGV, WH21B2, Eindrapport, 17-1-2014
60
VIII. Doorrekening differentieel Om de AGV te kunnen verplaatsen is in de aandrijfas een differentieel aanwezig. Het differentieel voorkomt het wegslippen van de wielen bij het maken van een bocht. Om het differentieel zo goed mogelijk te laten functioneren worden berekeningen uitgevoerd zoals beschreven in de boeken “Roloff en Matek machineonderdelen theorieboek en tabellenboek”. In Figuur 441 en Figuur 45 zijn gebruikte dimensies weergegeven.
Figuur 44:Roloff/Matek figuur 22-2
Doordat de kegeltandwielen een gelijk aantal tanden hebben en loodrecht op elkaar staan is tandwiel 1 gelijk aan tandwiel 2 (in vervolg aangeduid als 2 of rondsel).
Bepaling modulus
( )
( ) ( )
Bepaling gemiddelde steekcirkeldiameter
( )

Thema Enkelstukproduct 2 AGV, WH21B2, Eindrapport, 17-1-2014
61
( )
Voorwaarde controleren
( )
( ) ( ) ( ) ( )
( )
( )
Figuur 45: Roloff/Matek figuur 22-4
Buitenste steekcirkeldiameter
Buitenste steekcirkellengte
( )
Tandkop-, tandvoet- en tandhoogte
Buitenste topcirkeldiameter
( )
Gemiddelde steekcirkeldiameter
( )
Breedte

Thema Enkelstukproduct 2 AGV, WH21B2, Eindrapport, 17-1-2014
62
Kophoogtehoek
Voethoogtehoek
Topkegelhoek
Voetkegelhoek
Aanname materiaal: veredelingsstaal vlam- of inductiegehard C45E
( ) Virtueel aantal tanden
Koppel
Tandvoetsterkte
(
(
) )
(
(
) )
Grensspanning

Thema Enkelstukproduct 2 AGV, WH21B2, Eindrapport, 17-1-2014
63
Veiligheidsfactor
De minimale waarde van SF aanw ligt relatief dicht bij 1. Doordat de waarde groter is dan 1 wordt ervan uit gegaan dat de veiligheid tegen tandbreuk voldoende is gegarandeerd bij gemaakte keuzes voor bedrijfsfactoren.
Putvormingssterkte
√
√
De veiligheidsfactor tegen putvorming is groter dan 1, waarmee bij gekozen factoren de veiligheid kan worden gegarandeerd.

Thema Enkelstukproduct 2 AGV, WH21B2, Eindrapport, 17-1-2014
64
IX. Berekening boutverbinding differentieel aandrijfas Voor het bevestigen van het differentieel aan de aandrijfas is gekozen voor 4 bouten. Deze 4 bouten worden op afschuiving belast in het raakvlak tussen de aandrijfas en differentieel as. De berekening wordt gemaakt met behulp van Roloff/Matek.
τ f h v g [N 2]
F: kracht op de vier bouten [N]
A: oppervlak vier bouten [m2]
r: straal raakvlak [m] = 0.015 m
T: Torsie aandrijfas [Nm]
PAGV: vermogen motor AGV [W] = 1675.16 W
ω h ek elhe d [r d ]
fτ: veiligheidsfactor toelaatbare afschuiving: 0.58 (tabel 3.2a)
Re: rekgrens [Pa]: 235 MPa
Oppervlak van één bout;
Uit tabel 8.1 kunnen we vervolgens de standaard maat aflezen
Een M8 bout volstaat voor het bevestigen van de differentieel as aan de aandrijfas.

Thema Enkelstukproduct 2 AGV, WH21B2, Eindrapport, 17-1-2014
65
X. Bepaling as-diameter en buiging voor de aandrijfas Om er zeker van te zijn dat de aandrijfas het niet begeeft onder de belasting dient de dikte van de as berekend te worden. Daarnaast moet er worden gecontroleerd of de as niet zo ver doorbuigt dat het frame de grond gaat raken. Om dit te controleren dient er ook een buigingsberekening te worden gedaan. Beide berekeningen worden gemaakt op basis van S235JR.
Er wordt begonnen met de berekening van de diameter van de as. De minimale diameter van de as wordt met behulp van de volgende formule (uit Rolof Matek) bepaald;
√
Met: σb : buigspanning [Pa] = 180MPa (tabel 1-1) Mv: vergeijkingsmoment [Nm]
Om het vergelijkingsmoment te kunnen berekenen dient eerst het torsiemoment te worden bepaald;
Met; : rendement van de overbrenging = 0,81 (lessen van Dhr. van Steijn) Ka: veiligheidsfactor = 1,25 (tab 3-5) Pmotor: vermogen van de motor [W] = 1675W n: rotaties per seconde
Hiertoe dient eerst het aantal rotaties van de as per seconde te worden bepaald. Deze is gelijk aan die van de aandrijfwielen, dus kunnen deze gegevens worden gebruikt. De aandrijfwielen hebben een straal van 0,15m wat neer komt op een omtrek van 0,94m. Daarnaast is de gewenste snelheid van de AGV 1m/s. Het aantal rotaties per seconde wordt als volgt bepaald;
Uit het invullen van de rotaties per seconde in de formule volgt het volgende torsiemoment;
Voordat het vergelijkingsmoment kan worden bepaald dient ook het buigend moment nog te worden bepaald;
Met: P: Belasting [N] = 5722.5N L : Lengte van de as in [m] = 0,065m

Thema Enkelstukproduct 2 AGV, WH21B2, Eindrapport, 17-1-2014
66
Er wordt aangenomen dat de buiging alleen optreed op het uit het frame stekende gedeelte van de as. Hieruit volgt;
Vervolgens kan het vergelijkingsmoment worden bepaald met behulp van de volgende formule;
√ (
)
Met: τt: Torsiespanning [Pa]
Invullen van de formule geeft;
√ (
)
Nu het vergelijkingsmoment bekend is kan de minimale diameter worden bepaald;
√
Hieruit kan worden geconcludeerd dat de minimale diameter van de as 29.00 mm bedraagt. Gezien deze diameter niet erg gangbaar is wordt er gekozen voor een diameter van 30mm.
Nu de te gebruiken diameter bekend is kan de buiging van deze as worden berekend. De buiging wordt bepaald aan de hand van de volgende formule;
[ ]
Met: E: elasticiteitsmodulus [Pa] = 190 GPa I: massatraagheidsmoment [kg·m2]
Hiertoe dient eerst het massatraagheidsmoment te worden bepaald;
Met: r: radius van de as [m] = 0,015m
De massa van de as wordt als volgt bepaald;
Met: ρ : dichtheid [kg/m3] = 8000kg/m3
Figuur 46 Doorbuiging met inklemming

Thema Enkelstukproduct 2 AGV, WH21B2, Eindrapport, 17-1-2014
67
Invullen van de formule geeft;
Door de massa in te vullen in de formule wordt het massatraagheidsmoment;
Tot slot kan door het invullen van het massatraagheidsmoment de buiging worden bepaald;
Deze doorbuiging is erg klein en zal voor geen problemen zorgen.

Thema Enkelstukproduct 2 AGV, WH21B2, Eindrapport, 17-1-2014
68
XI. Afschuiving aandrijfas-wiel De aandrijfwielen van de AGV zijn bevestigd aan de aandrijfas door 4 pennen met schroefdraad (zie afbeelding). Doordat de velg de as volledig insluit/omsluit is er geen sprake van buiging in de pennen. Om deze reden worden er enkel gekeken naar de afschuiving tussen de pennen en de plaat.
Figuur 47:Weergave bevestiging wiel op aandrijfas
Doordat het wiel en dus ook de aandrijfas ronddraait is er sprake van een dynamische belasting. Voor de analyse wordt er naar één pen gekeken. Voor de versnellende kracht geldt:
T: koppel [Nm]
PAGV: vermogen motor AGV [W]
ωaandrijfas: hoeksnelheid [rad/s]
r: straal aandrijfas [m] = 0.03 m
De versnellende kracht op één pen is ideaalgesproken:
De normaalkracht op één pen is:
m: massa op één wiel [kg] g: gravitatieconstante [N/kg]

Thema Enkelstukproduct 2 AGV, WH21B2, Eindrapport, 17-1-2014
69
De krachten op de bevestigingsplaat zijn bekend. Van de versnellende kracht is bekent dat deze loodrecht op de straal staat. De normaalkracht heeft het gegeven altijd naar boven te wijzen (zie Figuur 474).
Omdat er sprake is van een dynamische situatie worden eerst de twee uiterste spanningen gezocht om te zien of het gaat om dynamisch zwellend of wisselend.
(
)
Het gaat om een dynamisch wisselende belasting doordat de minimale waarde negatief is en de maximale positief.
Toelaatbare afschuivingswaarde voor de vermoeiingssterkte uit 3.8 (Rolof Matek)
Rm: rekgrens [Pa] = 360 MPa (tabel 1.1)
Kt: fabriek veiligheidsfactor = 1
fWt: veiligheidsfactor wisselsterkte toelaatbare afschuiving = 0.58 (tabel 3.2a)
fwσ: veiligheidsfactor wisselsterkte maximale afschuiving = 0.4 (tabel 3.2a)
Veiligheidsfactor
τsW: toelaatbare afschuifspanning [Pa] σmax: maximale afschuifspanning [Pa]
De veiligheidsfactor is groter dan 1. Met de tussendoor gevonden waarden is de verwachting dat de pennen sterk genoeg zijn om de AGV te kunnen laten functioneren.

Thema Enkelstukproduct 2 AGV, WH21B2, Eindrapport, 17-1-2014
70
XII. Benodigde druk liftmechanisme berekening De lift wordt hydraulisch gelift, hiervoor is een hydropomp nodig. Om de hydropomp te specificeren is de benodigde druk nodig. De kracht die de last uitoefent, is 10000N en nog 2000N van de lepels met een kleine marge. In figuur 23 is een vrij lichaamsschema (VLS) weergegeven van de situatie. De liftkracht FLift moet minimaal gelijk zijn aan de FLast om de last stil te houden.
De algemene formule voor het omzetten van kracht naar druk is als volgt:
Met:
P = Druk [n/mm2] FLast = Te pompen kracht ACilinder = Oppervlakte drukvlak cilinder
De oppervlakte is te berekenen met
De kleinste diameter van de cilinder is 60mm=0.06m
[ ]
[
]
[ ]
Conclusie Voor het liften van de maximale last is een minimale druk van 42 bar nodig. Hierbij is uitgegaan van de kleinste diameter van de cilinder, want daarbij is de hoogste druk nodig. Voor de remmen is een minimale druk nodig van ongeveer 59 bar, dus het is mogelijk met dezelfde hydropomp.
Figuur 48: VLS lift

Thema Enkelstukproduct 2 AGV, WH21B2, Eindrapport, 17-1-2014
71
XIII. Berekening hydropomp Er moet worden bepaald hoeveel druk de hydropomp moet kunnen leveren om te remmen. Dit is benodigd om er zeker van te zijn dat de AGV binnen de gestelde eis van 0,3 meter stopt.
Berekening totale weerstand Allereerst dient hiertoe te worden berekend hoeveel kracht er nodig is om binnen deze afstand te stoppen. Deze kracht volgt uit de volgende formule;
Met: m: de massa van de AGV (1750 kg) a: de deceleratie van de AGV (constant) Hiertoe dient eerst deceleratie te worden bepaald. Deze volgt uit de volgende formule;
Met: s: maximale remafstand (0,3m) t: remtijd in seconden De remtijd wordt bepaald uit de volgende formule;
Met: v: snelheid voor remmen (1m/s) Invullen van de formule geeft;
Vervolgens volgt de deceleratie uit;
⁄
Ten slotte kan de totale weerstand worden bepaald;

Thema Enkelstukproduct 2 AGV, WH21B2, Eindrapport, 17-1-2014
72
Berekening weerstandskracht De totale weerstand die benodigd blijkt te zijn om de AGV binnen 0,3m stil te laten staan bedraagt minimaal 2916,67 N. Om tot de benodigde weerstandskracht te komen dienen hiervan de rolweerstand en de luchtweerstand te worden afgetrokken. Hierin wordt de luchtweerstand verwaarloosd gezien de lage snelheid en het feit dat dit geen nadelig effect zou hebben op de berekening. De rolweerstand is eerder al bepaald op 800 N. Hieruit volgt;
e eer d kr h N N N Er wordt geremd met twee remschijven. Deze moeten gezamenlijk de weerstandskracht genereren. Per wiel dient er dus een weerstandskracht van 1058,33 N te worden geleverd.
Berekening remweerstand De weerstandskracht grijpt aan op de buitenkant van het wiel. Echter de remweerstand grijpt aan ter hoogte van de schijfrem. Hiervoor dient eerst de benodigde kracht als volgt te worden omgezet;
Met; rwiel: straal van het wiel (15cm) rtot schijfrem: afstand as tot schijfrem (6,5cm) Invullen van de formule geeft;
Berekening remkracht Om de vloeistofdruk te bepalen dient eerst de remkracht te worden bepaald die deze vloeistof moet leveren. Deze kracht volgt uit de volgende formule;
Met: µd: de dynamische wrijvingscoëfficiënt van staal op staal (0,57) Fw: de remkracht Fn: de vloeistofkracht Invullen van de formule geeft;
N

Thema Enkelstukproduct 2 AGV, WH21B2, Eindrapport, 17-1-2014
73
Berekening vloeistofdruk De vloeistof levert zijn kracht in twee cilinders. De ene cilinder heeft een straal van 10,5mm en de andere een straal van 11mm. Het oppervlak waarop de remkracht wordt uitgeoefend wordt als volgt bepaald;
Tot slot kan de druk worden bepaald door de kracht te delen door het oppervlak;
Hieruit kan worden geconcludeerd dat de hydropomp een minimale druk van 59 bar moet kunnen opwekken.

Thema Enkelstukproduct 2 AGV, WH21B2, Eindrapport, 17-1-2014
74
8. Subsystemen AGV Hierin bevinden alle specificatie’s van motoren, sensoren en de hydraulische systemen van de AGV
I. Motor Het motorsysteem zorgt voor de aandrijving en de sturing van de AGV. Er zijn verschillende type motors nodig.
Motor specificatie Voor het kiezen van de motor wordt eerst het vermogen bepaald.
( )
( )
De motor dient een vermogen van minimaal 2069.32 W te kunnen leveren. Voor de motorleverancier is Adlee Powertronic Co. Ltd. gekozen.
Figuur 49: Overzicht beschikbare motoren
Type BM-2200E is met een nominaal vermogen(Rate Power) van 2200 W geschikt.
Figuur 50: Afmetingen voor DC-motor

Thema Enkelstukproduct 2 AGV, WH21B2, Eindrapport, 17-1-2014
75
Figuur 51: Driver voor DC-motor
Overbrenging

Thema Enkelstukproduct 2 AGV, WH21B2, Eindrapport, 17-1-2014
76
II. Servomotor Voor de besturen van het voorwiel is de volgende servomotor gekozen.
Technische specificaties:
Voedingsspanning 0 - 40 V=
Hoek 1.8 °
Stopmoment 0.49 Nm
Max. fasestroom 1 A
As-Ø 5 mm
Aslengte 20 mm
Type QSH4218-51-10-049
Motorlengte 51 mm
Afm. flens 42 x 42 mm
Figuur 52: Servomotor

Thema Enkelstukproduct 2 AGV, WH21B2, Eindrapport, 17-1-2014
77
III. Servo driver Voor de servo motor is een servo driver nodig welke ervoor zorgt dat deze op een beheerste manier wordt aangestuurd. De servomotor heeft een voedingspanning van 0 tot 40 volt bij een maximale fasestroom van 1A., wat neer komt op een maximaal vermogen van 40W. Hierbij zal dan ook een driver moeten worden gezocht. De driver die hiervoor is gekozen is de DC whistle 1/60 van Elmo motion control. Deze kan een maximaal vermogen leveren van 50 W mij een maximale fasestroom van 1A. Met een rendement van meer dan 99% wordt deze driver dan ook als voldoende geacht voor het aansturen van de servomotor. Verdere informatie is hieronder weergegeven: Figuur 53: Servomotor

Thema Enkelstukproduct 2 AGV, WH21B2, Eindrapport, 17-1-2014
78
IV. Navigatie systeem & sensoren De AGV moet op een bepaalde manier zijn weg door de fabriekshal kunnen vinden. In het conceptrapport zijn verschillende manieren benoemd die voor dit resultaat kunnen zorgen. Er is gekozen voor dit concept:
Het pad van de AGV wordt bepaald met behulp van lasers, een draad in de grond en magneten.
Figuur 54: Schematische weergave Draad
Draad Het gebruik van een combinatie zorgt voor een preciezere en veelzijdigere manier van verplaatsen. Het gebruiken van een draad in de grond is een van de oudste manieren van automatische sturen. De werking is ook eenvoudig. Dit komt doordat de AGV alleen opdrachten moet krijgen om de draad te volgen tot een bepaald punt. Het nadeel hiervan is dat de AGV niet van deze lijn af kan wijken. Wanneer de AGV zijn lading in een schap zou moeten plaatsen, zou deze oplossingen niet werken. De AGV moet hiervoor namelijk van zijn lijn afwijken. Ook moet deze draad een paar centimeter onder het oppervlak van de hal geplaatst worden. Het is hierdoor erg duur om de route aan te passen van de AGV.
Werking Dit principe werkt op basis van inductie. Wanneer er een spanning door een draad loopt ontstaat er een magnetisch veld. Op deze manier werkt ook de inductiemotor. De AGV kan met behulp van een sensor de magnetische
fluxdichtheid [ ] meten. Het magnetische veld draait om de draad, zoals op Figuur 32: Magnetische Flux te zien is.
Te zien is dat de stroom [I] loopt van+ naar -. Het magnetische veld zijn de rode cirkels. De sterkte van dit veld wordt kleiner wanneer de afstand tot de draad groter wordt. De AGV kan hierdoor berekenen via triangulatie welke afstand het heeft tot de draad. Dit gebeurt namelijk door middel van minimaal 3 meetpunten door de sensor. Dit is te zien in Figuur 55: Magnetische Flux Figuur 56: Meting magnetisch veld

Thema Enkelstukproduct 2 AGV, WH21B2, Eindrapport, 17-1-2014
79
Figuur 55: Magnetische Flux Figuur 56: Meting magnetisch veld
De 3 punten (rode plusjes) meten allemaal de Flux sterkte van het veld. Doordat dit veld rond is en steeds zwakker wordt, zullen de sensoren 3 verschillende waardes opleveren. Wanneer de linker sensor een hogere waarde geeft dan de rechter sensor betekent dit dat de linker sensor dus dichterbij het de draad is. De AGV moet hierdoor naar rechts corrigeren. Er is ook een tweede manier waarop dit gedaan wordt.
Magnetische Tape/draad Door gebruik te maken van een magnetische draad kunnen een aantal problemen met de draad hiervoor opgelost worden. Een magnetische draad of tape kan op de grond van de fabriekshal geplakt worden. Hierdoor kunnen gemakkelijk aanpassingen worden gemaakt aan de route. Deze tape werkt op een zelfde manier als de inductie van het vorige stuk. Alleen wordt er voor het opwekken van het magnetische veld geen draad onder spanning gebruikt, maar wordt dit door het magnetische tape gedaan. De tape zendt van zichzelf al een magnetische veld uit, hierdoor ontstaan ook nog extra opties. Er kunnen namelijk aan de rand van het pad van AGV magnetische “stickers” geplakt worden. De AGV kan aan elke uniek sticker zijn locatie in de fabriekshal bepalen. Dit is handig wanneer de AGV voor een handmatige opdracht is opgeroepen.
Laser Voor het plaatsen van de pallets in de schappen, wordt gebruik gemaakt van lasers. Deze kunnen door middel van triangulatie de precieze locatie bepalen van de AGV. Dit is nodig omdat anders de AGV zijn lading niet nauwkeurig midden in het schap zou kunnen plaatsen. De laser werkt op een soortgelijke manier als waarop vleermuizen met sonar voortbewegen. Door een laser op vaste plaatsen te richten kan een AGV zijn weg vinden. Wanneer de laser terug gekaatst wordt kan de AGV zijn positie afleiden.
Lasers zijn lichtbundels met een vaste snelheid, de lichtsnelheid c, deze snelheid is een constante. Dit kan gebruikt worden om de afstand tot een bepaald punt af te leiden. Door de laser te laten weerkaatsen op een reflector en hierna zelf het signaal weer op te vangen, kan bepaald worden hoever deze reflector weg is. Omdat de snelheid constant is en tijd tussen verzenden en ontvangen van de puls gemeten kan worden, valt de afstand te berekenen. Door de formule s=v/t. s is hierin de afstand in meters. De snelheid v is hier de constante c (=3*108 m/s).

Thema Enkelstukproduct 2 AGV, WH21B2, Eindrapport, 17-1-2014
80
Door op vaste plaatsen in de hal en het schap reflectoren te plaatsen kan de AGV zijn weg vinden. Er kunnen bijvoorbeeld 2 reflectoren aan de uiteinde van de gangen geplaatst worden. Door de afstand te meten tussen deze twee uiteinde kan de AGV nauwkeurig bepalen voor welk schap het staat. Het plaatsen van reflectoren in het schap zelf maakt het mogelijk om tijdens het plaatsen van een pallet nog aanpassingen te maken. Hierdoor zal de pallet op de juiste manier geplaatst worden.
Figuur 57: Laser positionering Figuur 58: Laser scanner
Scanner Een veelgebruikte scanner voor de automatische industrie is er een met ronddraaiende scanner. Zoals het voorbeeld in de afbeelding hieronder. Er is van deze scanner veel documentatie beschikbaar. Voor de aansturing is hier dus veel van af te leiden. Er zijn namelijk een aantal factoren die van belang zijn bij het werken met lasers. Zo moet de laser zelf veilig genoeg zijn om mee te werken zonder speciale zichtbescherming te moeten dragen. De laser die in dit apparaat gebruikt wordt valt onder klasse 1. Dit is de laagste klasse en is onder alle gevallen veilig en kan geen schade aan het oog leveren, zelfs niet met behulp van een vergrootglas (zoals bril). Deze laser heeft een frequentie van 6 tot 18 s-1, dit wil zeggen dat er maximaal 18 metingen per seconden gedaan kunnen worden.

Thema Enkelstukproduct 2 AGV, WH21B2, Eindrapport, 17-1-2014
81
V. Veiligheidssysteem & sensoren Bij veiligheidssystemen wordt er onderscheid gemaakt tussen beveiligingssystemen en waarschuwingssystemen.
Beveiligingssystemen In de AGV zitten verschillende sensoren verwerkt die zorgen voor de veiligheid van zowel machine als mens. Hierbij wordt gedacht aan:
- Nabijheidssensoren
- Snelheidsbegrenzer
- Overbelastingssensoren
- Dodemans- /noodknop
Deze systemen zijn verwerkt in de AGV en zenden bij overschrijding een direct signaal naar de PLC.
Nabijheidssensor Er zijn veel verschillende nabijheidssensoren te vinden, maar voor deze AGV moet er gekozen worden voor een capacitieve sensor. Deze sensor zorgt voor een capacitief veld om het hart van de sensor. Wanneer dit veld verstoort wordt verstuurt de sensor een signaal naar de PLC. En capacitieve sensor vraagt een voltage van 6-36V DC.
Snelheidsbegrenzer De AGV mag maximaal 1,0 m/s rijden, verder zijn er geen verschillen in snelheden per afdeling. Hiervoor is een eenvoudige snelheidsbegrenzer nodig die zorgt dat de AGV niet boven de 1,0 m/s uitkomt. Deze zal specifiek voor de AGV gemaakt moeten worden. Hiervoor zal gebruikgemaakt worden van een tachometer. Op de niet-aangedreven as van de AGV zal een klein reflecterend stukje geplakt worden. De tachometer stuurt vervolgens een laserstraal, welke reflecteert wanneer dat stukje langskomt, wat gedetecteerd wordt door een sensor. Op deze manier wordt elke omwenteling van de as waargenomen, waarmee het toerental bepaald kan worden.
Overbelasting sensor Bij het liften van pallets is het belangrijk dat de maximale liftkracht van 10.000 N niet wordt overschreden. AE sensors maakt deze sensoren, hierbij gaat de maximale liftkracht tot zo’n 5000 ton. Deze specifieke sensor vraagt een voltage van 1-5 V DC. Wat deze AGV vraagt is dus zeker leverbaar en vraagt geen onmogelijke voltage van de PLC.
Dodemans- /noodknop Bij heftrucks worden onderscheid gemaakt in noodknoppen en dodemansknoppen. Noodknop schakelt de spanning uit. Dodemansknop zorgt ervoor dat de rem geactiveerd wordt, wanneer de heftruck onbemand is. Bij de AGV is een noodknop niet voldoende, aangezien de hydro pomp aangedreven dient te worden om te kunnen remmen. Dus zal
Figuur 59: Capacitieve sensor
Figuur 60: Overbelasting sensor
Figuur 61: Noodstop
Thema Enkelstukproduct 2 AGV, WH21B2, Eindrapport, 17-1-2014
82
er een specifieke noodknop gemaakt moeten worden die alle spanning uitschakelt behalve van de hydro pomp. Hiermee zal de AGV snel tot stilstand gebracht worden. Er zijn verschillende standaard versies te vinden die 12-24V DC vragen.
Waarschuwingssysteem Er zijn verschillende waarschuwingssystemen die gebruikt worden op heftrucks. Lichtsignalen en geluidsignalen komen het meest voor.
Zwaailicht Volgens het plan van aanpak is de AGV voorzien van een zwaailicht die drie seconden alvorens het wegrijden aangaat. Deze zijn ook in veel verschillende maten en soorten te vinden. Het voltage is 10-36V DC.
Figuur 62: Zwaailicht

Thema Enkelstukproduct 2 AGV, WH21B2, Eindrapport, 17-1-2014
83
VI. Displays Het is ook mogelijk om de AGV te besturen vanaf systemen op de AGV zelf. Dit kan door knoppen en (Touch screen)displays. Voor deze AGV is gekozen voor een besturing met gebruik van een Touch screen display.
Touch screen display Het gekozen Touch screen display is een scherm dat aanraakgevoelig is. Het scherm is gemaakt voor industriële toepassingen en daarom bijvoorbeeld bestand tegen schokken en water. Het roestvrijstalen chassis is voorzien van een 10.4 inch scherm waarop informatie kan worden weergeven. Denk daarbij aan informatie over de bestemming van de AGV, de afgelegde kilometers en een indicator van de accu. Het systeem beschikt over meerdere connectoren dat verbinden met eventuele computer en andere systemen buiten de AGV mogelijk maakt. Hierdoor is het bijvoorbeeld mogelijk een overzicht te maken voor de levensduur van bepaalde onderdelen.
Er wordt gebruik gemaakt van het volgende scherm:
Figuur 63: Diplay

Thema Enkelstukproduct 2 AGV, WH21B2, Eindrapport, 17-1-2014
84
VII. Accucapaciteit Van de accu’s dient de grootte te worden bepaald. Er wordt vanuit gegaan dat de accu’s een volledige werkdag van 8 uur kunnen volmaken.
( )
( )
[ ] ( [ ]
[ ]) (
)
(bij 48 V)
[ ] ( [ ]
[ ]) (
)
(bij 48 V)
De AGM accu heeft het volgende voordeel: Als startaccu levert deze hogere startstromen. Het feit dat een AGM accu als startaccu kan worden gebruikt heeft bijgedragen aan de beslissing om alle accu’s parallel te schakelen.
Totale accucapaciteit:
( )
De AGM accu’s worden vooral met 12V geleverd:
( )
Gekozen is voor accu’s van Victron Energy:
Figuur 64: Levensduur bij cyclisch gebruik
Er wordt voor 80% ontlading van de accu’s gekozen.
( )

Thema Enkelstukproduct 2 AGV, WH21B2, Eindrapport, 17-1-2014
85
Figuur 65: Overzicht AGM accu's
De grootste accu levert 220 Ah. Vijf maal deze accu levert een gecombineerde accucapaciteit op van 1100 Ah. Deze capaciteit is groter dan de vastgestelde waarde voor 80% ontlading (=979.718 Ah).
Ervan uitgaande dat een AGV 365 dagen per jaar werkt, 8 uur per dag, wordt de accu elke dag opgeladen. Door van 80% uit te gaan is de verwachting dat 400 cycli haalbaar is. De accu’s hebben hierdoor een levensduur van 400 dagen.
Figuur 66: Overzicht prijslijst accu's
Er zijn 5 accu’s van 220Ah nodig voor het aandrijven van de AGV gedurende één werkdag. Per stuk kosten de accu’s €470 excl. BTW. Totaal levert dit een kostenprijs op van €2350.
Voorwaarden parallelschakeling Het parallel schakelen van AGM accu mag onder de volgende voorwaarden:
De pluspolen van de accu’s moeten met elkaar zijn verbonden. Ook alle
minpolen dienen met elkaar te worden verbonden.
Alle accu’s moeten gelijke spanning leveren. Een 12V accu mag bijvoorbeeld
alleen met andere 12V accu’s worden verbonden.
Alle accu’s moeten identieke capaciteit hebben. Een accu van 100Ah moet
daarom parallel geschakeld staan met een andere accu met ook 100Ah.
De fabricagedatum moet vrijwel identiek zijn. Als dit niet het geval is kan
een van de accu’s defect raken. Bij het defect raken van één accu dient om
deze reden een compleet nieuwe set te worden aangeschaft.

Thema Enkelstukproduct 2 AGV, WH21B2, Eindrapport, 17-1-2014
86
Sluit een lader of omvormer niet op één accu aan maar aan de accu aan het
uiteinde bij de pluspool en aan het andere uiteinde aan de minpool.
Figuur 67: aansluiten accu's aan oplader of omvormer

Thema Enkelstukproduct 2 AGV, WH21B2, Eindrapport, 17-1-2014
87
VIII. Hydraulische componenten De druk die nodig is voor het laten bewegen van de remmen en de hefmast is maximaal 60 bar. Er is een hydropomp nodig die deze druk minimaal kan halen. Een pomp werkt op een bepaald aantal toeren per minuut, het verhogen van de tpm zorgt voor een hogere verplaatsing van vloeistof. In het geval van de remmen zullen de trommels zich dus sneller sluiten en komt de AGV sneller tot stilstand. Het volume dat hier voor nodig is, hangt ook af van de totale hoeveelheid vloeistof in de leidingen.
Een pomp met een vermogen om 100 bar druk te genereren zal hiervoor ruim voldoende zijn. De pomp hoeft hierom niet op maximale kracht te werken, dit zorgt voor een langere levensduur.
Er is doormiddel van raadplegen van verschillende handelaren gekozen voor het volgende model. De Haldex/Concentric W300 serie past goed bij de eisen. Er kunnen verschillende eisen gesteld worden. Zo kan het volume en druk aangepast worden aan de specifieke wensen.
Het benodigde vermogen van deze pompen is niet te vinden in de specificaties van het bedrijf zelf.
Ventielen De ventielen zorgen voor de aansturing van de hydrauliek. In de AGV wordt een elektrisch signaal gebruikt om de hydrauliek aan te sturen. Dit gebeurt met een RE06M**W2 PROPORTIONAL PRESSURE RELIEF VALVE, CETOP 3, NG6 van Parker.
Dit ventiel zorgt ervoor dat de druk in het systeem goed geregeld kan worden. Dit ventiel is bestand tegen een druk tot 175 bar. Dit is ruim voldoende voor ons systeem. Dit ventiel kan zowel gebruikt worden bij het remmen als de lift omdat per ventiel verschillende instellingen kunnen worden toegepast waardoor zijn inzetbaarheid groot is.
Figuur 68: Ventiel

Thema Enkelstukproduct 2 AGV, WH21B2, Eindrapport, 17-1-2014
88
9. Werktekeningen Op de volgende pagina’s zijn werktekeningen van meerdere onderdelen weergeven. Deze onderdelen zijn met behulp van de werktekeningen te maken in een werkplaats. Er wordt gebruikt gemaakt van gestandaardiseerde tekenregels zodat iedere constructeur ermee overweg kan. Er zijn tekeningen gemaakt van de volgende onderdelen:
- Steunbalk (ISO 50x50x5) - Stuurwiel vork - Aandrijfas - Binnenmast - Differentieel as - Liftvork - Stuurwiel as

Thema Enkelstukproduct 2 AGV, WH21B2, Eindrapport, 17-1-2014
89

Thema Enkelstukproduct 2 AGV, WH21B2, Eindrapport, 17-1-2014
90

Thema Enkelstukproduct 2 AGV, WH21B2, Eindrapport, 17-1-2014
91

Thema Enkelstukproduct 2 AGV, WH21B2, Eindrapport, 17-1-2014
92
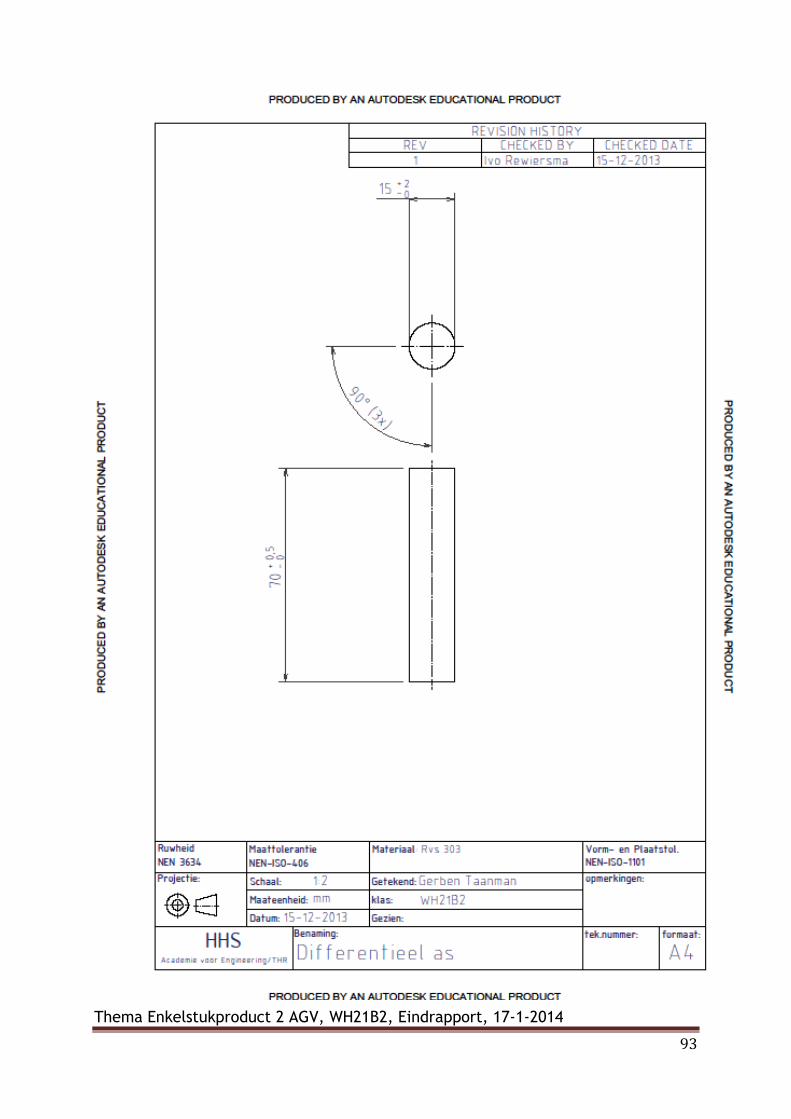
Thema Enkelstukproduct 2 AGV, WH21B2, Eindrapport, 17-1-2014
93

Thema Enkelstukproduct 2 AGV, WH21B2, Eindrapport, 17-1-2014
94

Thema Enkelstukproduct 2 AGV, WH21B2, Eindrapport, 17-1-2014
95

Thema Enkelstukproduct 2 AGV, WH21B2, Eindrapport, 17-1-2014
96
10. Specificaties onderdelen
PLC

Thema Enkelstukproduct 2 AGV, WH21B2, Eindrapport, 17-1-2014
97
Scherm
ADP-1101 Series
Specificatie Waarde
Scherm grootte 10.4"
Belichting CCFL
Resolutie 800x600
Luminatie (cd/m2) 250
Touch screen Standaard
OSD Controls Achterkant
Grafische connectoren VGA, optioneel DVI, RCA, S-Video
Power Input 12VDC, 11-28VDC optioneel
IP Rating IP65 front panel
Constructie Stalen frame, Plastic kap
Werkzame temperatuur 0 C tot 50 C
Werkzame trilling 1G 10-150Hz
Werkzame schok 30G (11ms)
Dimensies (BxHxD mm) 317x243x45
Bevestiging Paneel/VESA 75

Thema Enkelstukproduct 2 AGV, WH21B2, Eindrapport, 17-1-2014
98
11. Bronvermelding
Analyse van de werking van de AGV http://www.agvsystems.com/vehicles http://www.agvsystems.com/agvs
Methodisch ontwerpen -
Voeding 29-11-2013 9:28, http://www.tuning-gids.nl/acculader_voor_auto.htm 29-11-2013 9:46 http://batteryuniversity.com/learn/article/all_about_chargers 29-11-2013 10:22 http://www.conrad.nl/ce/nl/product/396668/IVT-Acculader-PL-C001P-911006-Automatische-stekkerlader-6V-12V-1A-Oplader-voor-loodaccu?ref=searchDetail 29-11-2013 10:19 http://www.accucentraal.nl/optimate-2?gclid=CIOqqOrUibsCFURc3god5WgAWg
Berekening VI http://www.designerdata.nl/index.php?sub_page=29&pag=20&subject=3&name=Traagheidsmoment+van+de+doorsnede&PHPSESSID=a6cddc0b6d5cc8ae8584e578d415c259
Berekening IX http://www.jonoandjohno.com/products/16HP-VERTICAL-SHAFT-ENGINE-MOTOR-PETROL-4-STROKE.html
Navigatiesysteem http://www.goetting-agv.com/dateien/downloads/G_43600-A_E_data-sheet_R05_TD.pdf http://www.mhi.org/downloads/industrygroups/agvs/elessons/vehicles-work-agv.pdf http://www.roboteq.com/index.php/applications/how-to/278-building-a-magnetic-track-guided-agv http://en.wikipedia.org/wiki/Laser_safety#Class_1 http://www.b-plus-kk.com/PDF/Global/Guide/GS108.pdf http://www.goetting-agv.com/dateien/downloads/HG_43600XA_D_device-description_R02_TD.pdf
Communicatiesysteem http://50.18.122.28/en/12762/2181376/2416247/1239760/1551236/ff7f6584ce786c2adc2f7215ac0d7aad/Automation_Systems.pdf http://www.ab.com/en/epub/catalogs/12762/2181376/2416247/1239760/1551236/PLC-5-EtherNet-IP-Interface-Module.html http://www.goetting-agv.com/dateien/downloads/HG_43600XA_D_device-description_R02_TD.pdf http://www.moxa.com/application/WLAN_AGV.htm
Accu systeem http://mickelmoen.blogspot.nl/2013/10/serie-enof-parallel-schakelen-van-accus.html http://www.jmsails.nl/site/index.php?option=com_content&view=article&id=264&Itemid=265
Hydraulische componenten http://www.dromec.nl/web/nl/101_hydropomp.htm http://www.concentricab.com/_downloads/Catalogs/W300_EU.pdf


















