AU Predavanje10 Bez Animacija
61
Automatsko upravljanje 2011/2012 Prof.dr.sc. Nedjeljko Peri´ c, Prof.dr.sc. Zoran Vuki´ c Prof.dr.sc. Mato Baoti´ c, Doc.dr.sc. Nikola Miškovi´ c Zavod za automatiku i raˇ cunalno inženjerstvo Fakultet elektrotehnike i raˇ cunarstva Predavanje 10 - Polovi, nule i vremenski odzivi Automatsko upravljanje :: Predavanje 10 - Polovi, nule i vremenski odzivi c 2011 Peri ´ c,Vuki ´ c,Baoti ´ c&Miškovi ´ c 1 / 61
-
Upload
damir-mileta -
Category
Documents
-
view
94 -
download
3
Transcript of AU Predavanje10 Bez Animacija
Automatsko upravljanje 2011/2012
Prof.dr.sc. Nedjeljko Peric, Prof.dr.sc. Zoran VukicProf.dr.sc. Mato Baotic, Doc.dr.sc. Nikola Miškovic
Zavod za automatiku i racunalno inženjerstvoFakultet elektrotehnike i racunarstva
Predavanje 10 - Polovi, nule i vremenski odzivi
Automatsko upravljanje :: Predavanje 10 - Polovi, nule i vremenski odzivi c© 2011 Peric,Vukic,Baotic&Miškovic 1 / 61

Uvod
Sažetak Predavanja 09
• Frekvencijske karakteristike mogu se prikazati na više nacina; zapraksu su najvažniji Nyquistov i Bodeov dijagram
• Nyquistov dijagram predstavlja graficki prikaz G(jω) = A(ω)ejϕ(ω) ukompleksnoj G-ravnini, gdje je ω parametar
• Nyquistov i Bodeov dijagram daju brzi uvid u vladanje sustava; iznjih se jednostavno ocita pojacanje i fazno kašnjenje(prethod
_enje) za razlicite frekvencije
• U frekvencijskim podrucjima u kojima asimptote dobro prateamplitudno-frevencijsku karakteristiku Bodeova dijagrama (spozitivnim ili negativnim nagibom) sustav se može aproksimiratiderivatorom odnosno integratorom
• Neminimalnost faze odnosi se na sustave koji imaju nule i polove udesnoj poluravnini kompleksne s-ravnine
• Stvorena je osnova za analizu stabilnosti linearnih vremenskinepromjenljivih sustava zasnovanu na frekvencijskimkarakteristikama
Automatsko upravljanje :: Predavanje 10 - Polovi, nule i vremenski odzivi c© 2011 Peric,Vukic,Baotic&Miškovic 2 / 61
Uvod
Cilj
• Razumjeti vezu izmedu položaja polova i nula u kompleksnojs-ravnini i vremenskih odziva sustava
• Pokazati kako se vremenski pokazatelji kvalitete preslikavaju us-podrucje
• Pokazati kakav je utjecaj nula u desnoj poluravnini kompleksnes-ravnine na odziv sustava
Automatsko upravljanje :: Predavanje 10 - Polovi, nule i vremenski odzivi c© 2011 Peric,Vukic,Baotic&Miškovic 3 / 61

Polovi i nule prijenosne funkcije
Polovi i nule prijenosne funkcije
• Prijenosna funkcija, definirana kao odnos Laplaceovetransformacije izlaza sustava i Laplaceove transformacije njegovaulaza uz pocetne uvjete jednake nuli, u opcem se slucaju možeizraziti odnosom dvaju polinoma:
G(s)def=
Y (s)
U(s)=
B(s)
N(s)(10-1)
• Uz pretpostavku da polinomi B i N nemaju zajednickih nul-tocaka
• Iz N(s) = 0 slijede konacni polovi sustava• Iz B(s) = 0 slijede konacne nule sustava
• Napomena: U daljnjem tekstu se pod pojmovima polovi i nulesustava podrazumijevaju konacni polovi i nule sustava
Automatsko upravljanje :: Predavanje 10 - Polovi, nule i vremenski odzivi c© 2011 Peric,Vukic,Baotic&Miškovic 4 / 61

Sustavi prvog reda Sustav prvog reda bez nule
Sustav prvog reda bez nule
• Prijenosna funkcija PT1-sustava:
G(s) = Ks+a
→
g(t) = Ke−at , ∀t ≥ 0
h(t) = Ka− K
ae−at , ∀t ≥ 0
(10-2)
gdje je sp1 = −a pol sustava, a s T = 1a oznacava se vremenska
konstanta sustava• Ako je a > 0, sustav je stabilan (Re(spi) < 0)
0 1 2 3 4 5 6 7 8 9 100
0.1
0.2
0.3
0.4
0.5
0.6
0.7
0.8
0.9
1
at
g(at)K
Slika 10.1: Težinska funkcija PT1-sustava
0 1 2 3 4 5 6 7 8 9 100
0.1
0.2
0.3
0.4
0.5
0.6
0.7
0.8
0.9
1
at
aK
h(at)
Slika 10.2: Prijelazna funkcija PT1-sustava
Automatsko upravljanje :: Predavanje 10 - Polovi, nule i vremenski odzivi c© 2011 Peric,Vukic,Baotic&Miškovic 5 / 61

Sustavi prvog reda Sustavi prvog reda s nulom u lijevoj poluravnini
Prijenosna funkcija sustava prvog reda s nulom u lijevojpoluravnini s-ravnine (1)
• Opci oblik prijenosne funkcije sustava prvog reda s nulom u lijevojpoluravnini s-ravnine:
G(s) = Ks + b
s + a(10-3)
• Primjer 10.1: Realizacija G(s) iz (10-3). Jednostavna realizacijaprijenosne funkcije (10-3) sklopom s operacijskim pojacalom(shvacenim kao idealno pojacalo), Slika 10.3, glasi:
G(s) =U2(s)
U1(s)= K1
1 + Ts
1 + αTs= K1
a
b
s + b
s + a, (10-4)
pri cemu je K1 statickopojacanje sustava, a T i αT suodgovarajuce vremenskekonstante, te je prema (10-3)a = 1
αT, b = 1
T, K = K1
ab
1C
R
R
2C
1u 2u
Slika 10.3: Realizacija G(s) iz (10-3).Automatsko upravljanje :: Predavanje 10 - Polovi, nule i vremenski odzivi c© 2011 Peric,Vukic,Baotic&Miškovic 6 / 61

Sustavi prvog reda Sustavi prvog reda s nulom u lijevoj poluravnini
Primjer 10.1: Realizacija G(s) iz (10-3) (2)
• Parametri prijenosne funkcije (10-4) odred_eni su pasivnim
komponentama sklopa:
K1 = 1, T = RC1, α =C2
C1
• Ovisno o vrijednosti parametra α dobiju se razliciti odzivi sklopa(shvacenog kao sustav)
• (a) 0 < α < 1
G(s) =1 + Ts
1 + αTs=
1 + αTs
1 + αTs+
(1 − α)Ts
1 + αTs= 1 +
(
1
α− 1
)
αTs
1 + αTs(10-5)
• Fazna karakteristika sklopa (prijenosne funkcije) ima faznoprethod
_enje (o primjeni elementa s faznim prethod
_enjem bit ce rijeci
u narednim predavanjima)• Iz (10-5) vidljivo je da se ovaj clan može promatrati kao paralelni spoj
P-clana jedinicnog pojacanja i DT1-clana (u cjelini: PDT1-clan)
Automatsko upravljanje :: Predavanje 10 - Polovi, nule i vremenski odzivi c© 2011 Peric,Vukic,Baotic&Miškovic 7 / 61
Sustavi prvog reda Sustavi prvog reda s nulom u lijevoj poluravnini
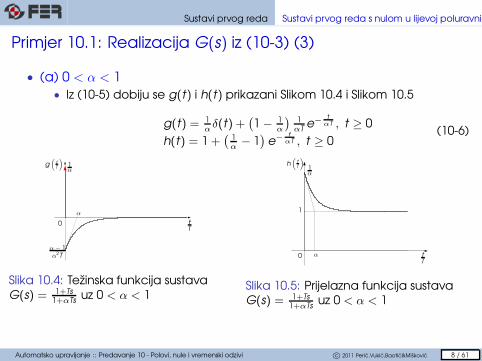
Primjer 10.1: Realizacija G(s) iz (10-3) (3)
• (a) 0 < α < 1
• Iz (10-5) dobiju se g(t) i h(t) prikazani Slikom 10.4 i Slikom 10.5
g(t) = 1αδ(t) +
(1 − 1
α
)1αT
e−
tαT , t ≥ 0
h(t) = 1 +(
1α− 1
)e−
tαT , t ≥ 0
(10-6)
tT
g(
tT
)
α
α− 1α2T
1α
0
Slika 10.4: Težinska funkcija sustavaG(s) = 1+Ts
1+αTsuz 0 < α < 1
tT
α
1α
h(
tT
)
0
1
Slika 10.5: Prijelazna funkcija sustavaG(s) = 1+Ts
1+αTsuz 0 < α < 1
Automatsko upravljanje :: Predavanje 10 - Polovi, nule i vremenski odzivi c© 2011 Peric,Vukic,Baotic&Miškovic 8 / 61

Sustavi prvog reda Sustavi prvog reda s nulom u lijevoj poluravnini
Primjer 10.1: Realizacija G(s) iz (10-3) (4)
• (b) α > 1
• Prijenosna funkcija ima oblik (10-4), ali ju zapisujemo na nacin
G(s) =1
α+
1 − 1α
1 + αTs(10-7)
• Fazna karakteristika sklopa (prijenosne funkcije) ima fazno kašnjenje (oprimjeni elementa s faznim kašnjenjem bit ce takod
_er rijeci u
narednim predavanjima)• Prema (10-7) ovaj se sustav sastoji od paralelnog spoja P-clana
pojacanja 1α< 1 i PT1-clana (u cjelini: PPT1-clan)
Automatsko upravljanje :: Predavanje 10 - Polovi, nule i vremenski odzivi c© 2011 Peric,Vukic,Baotic&Miškovic 9 / 61

Sustavi prvog reda Sustavi prvog reda s nulom u lijevoj poluravnini
Primjer 10.1: Realizacija G(s) iz (10-3) (5)
• (b) α > 1• Analiticki izrazi za težinsku i prijelaznu funkciju isti su kao i za slucaj s
faznim prethod_enjem, razlika u odzivima prikazanim na Slici 10.6 i
Slici 10.7 proizlazi iz razlike u iznosu parametra α:
g(t) = 1αδ(t) +
(1 − 1
α
)1αT
e−
tαT , t ≥ 0
h(t) = 1 +(
1α− 1
)e−
tαT , t ≥ 0
(10-8)
tT
g(
tT
)
α
α− 1α2T
1α
0
Slika 10.6: Težinska funkcija sustavaG(s) = 1+Ts
1+αTsuz α > 1
tT
α
1α
h(
tT
)
0
1
Slika 10.7: Prijelazna funkcija sustavaG(s) = 1+Ts
1+αTsuz α > 1
Automatsko upravljanje :: Predavanje 10 - Polovi, nule i vremenski odzivi c© 2011 Peric,Vukic,Baotic&Miškovic 10 / 61

Sustavi prvog reda Sustavi prvog reda s nulom u lijevoj poluravnini
Osvrt na Primjer 10.1. (1)
• Usporedbom odziva PT1-sustava i onih dobivenih u Primjeru 10.1.stjece se uvid u bitan utjecaj nula prijenosne funkcije sustava navremenski odziv
• Pri tome je, nadalje, važno u kakvom su odnosu vrijednosti nula ipolova (odnosno pripadajucih vremenskih konstanata) prijenosnefunkcije
• Nule iz lijeve poluravnine kompleksne s-ravnine koje su bližeimaginarnoj jω-osi nego polovi dominantnije utjecu na vremenskiodziv sustava
• Ta se dominantnost ogleda u izraženom nadvišenju (“špici”)prijelazne funkcije h(t) (Slika 10.5): za vrijednosti α bliske nuli "špica"poprima enormno visoke vrijednosti (za promatrani sklopneizvedive!)
Automatsko upravljanje :: Predavanje 10 - Polovi, nule i vremenski odzivi c© 2011 Peric,Vukic,Baotic&Miškovic 11 / 61

Sustavi prvog reda Sustavi prvog reda s nulom u lijevoj poluravnini
Osvrt na Primjer 10.1. (2)
• Za α ≈ 0 (izraženo fazno prethod_enje) nazivnik prijenosne funkcije
G(s) =1 + Ts
1 + αTs
može se zanemariti, pa ona poprima svojstva PD-clana (polsp1 = − 1
αT puno je udaljen od ishodišta u odnosu na nulu sN1 = − 1T ):
G(s)α≈0≈ 1 + Ts
• Nasuprot tome, za velike iznose α (izraženo fazno kašnjenje), tj. zadominantniji utjecaj pola u odnosu na nulu (pol − 1
αTpuno je bliži
ishodištu u odnosu na nulu − 1T), prijenosna se funkcija može
aproksimirati PT1-clanom vremenske konstante αT , a u daljnjojaproksimaciji i I-clanom integracijske konstante αT :
G(s)α≫1≈ 1
1 + αTs
α≫1≈ 1
αTs
Automatsko upravljanje :: Predavanje 10 - Polovi, nule i vremenski odzivi c© 2011 Peric,Vukic,Baotic&Miškovic 12 / 61

Sustavi prvog reda Sustavi prvog reda s nulom u lijevoj poluravnini
Osvrt na Primjer 10.1. (3)
• Provedena razmatranja vezana za utjecaj polova i nula navremenski odziv sustava mogla bi se osvijetliti i analizompripadajuce frekvencijske karakteristike promatranog primjera
G(jω) =1 + jωT
1 + αjωT
pomocu Nyquistova i Bodeova dijagrama
• Napomena: Analiza prethodne frekvencijske karakteristikepomocu Nyquistova i Bodeova dijagrama – samostalni radstudenata
Automatsko upravljanje :: Predavanje 10 - Polovi, nule i vremenski odzivi c© 2011 Peric,Vukic,Baotic&Miškovic 13 / 61
Sustavi drugog reda Sustav drugog reda bez nula
Sustav drugog reda bez nula (PT2-clan) (1)
• Primjer 10.2.: Sustav drugog reda bez nula dan je prijenosnomfunkcijom:
G(s) =1
12 s2 + 3
2 s + 1=
2
(s + 1)(s + 2)
te težinska i prijelazna funkcija proizlaze primjenom inverzneLaplaceove transformacije:
G(s) = 2(s+1)(s+2) =
2s+1
+ −2s+2
•−− g(t) = 2e−t − 2e−2t , t ≥ 0
H(s) = 2s(s+1)(s+2) =
1s + −2
s+1 + 1s+2 •−− h(t) = 1 − 2e−t + e−2t , t ≥ 0
Automatsko upravljanje :: Predavanje 10 - Polovi, nule i vremenski odzivi c© 2011 Peric,Vukic,Baotic&Miškovic 14 / 61
Sustavi drugog reda Sustav drugog reda bez nula
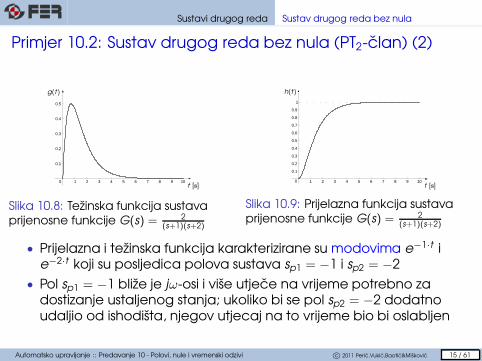
Primjer 10.2: Sustav drugog reda bez nula (PT2-clan) (2)
0 1 2 3 4 5 6 7 8 9 10
0.1
0.2
0.3
0.4
0.5
t [s]
g(t)
Slika 10.8: Težinska funkcija sustavaprijenosne funkcije G(s) = 2
(s+1)(s+2)
1 2 3 4 5 6 7 8 9 100
0.1
0.2
0.3
0.4
0.5
0.6
0.7
0.8
0.9
1
t [s]
h(t)
Slika 10.9: Prijelazna funkcija sustavaprijenosne funkcije G(s) = 2
(s+1)(s+2)
• Prijelazna i težinska funkcija karakterizirane su modovima e−1·t ie−2·t koji su posljedica polova sustava sp1 = −1 i sp2 = −2
• Pol sp1 = −1 bliže je jω-osi i više utjece na vrijeme potrebno zadostizanje ustaljenog stanja; ukoliko bi se pol sp2 = −2 dodatnoudaljio od ishodišta, njegov utjecaj na to vrijeme bio bi oslabljen
Automatsko upravljanje :: Predavanje 10 - Polovi, nule i vremenski odzivi c© 2011 Peric,Vukic,Baotic&Miškovic 15 / 61

Sustavi drugog reda Sustav drugog reda s nulom u lijevoj poluravnini
Sustav drugog reda s jednom nulom u lijevoj poluravninis-ravnine
• Primjer 10.3: Prijenosna funkcija, te težinska i prijelazna funkcijasustava drugog reda s nulom u lijevoj poluravnini s-ravnine
G(s) = 4s+2s2+3s+2
= 4s+ 1
2
(s+1)(s+2) →
g(t) = 6e−2t − 2e−t , t ≥ 0
h(t) = 1 − 3e−2t + 2e−t , t ≥ 0
0 12 3 4 5
6 7 8 9 10
1
2
3
4
5
t [s]
g(t)
Slika 10.10: Težinska funkcija sustava
prijenosne funkcije G(s) = 4s+ 1
2(s+1)(s+2)
0 1 2 3 4 5 6 7 8 9 10
0.2
0.4
0.6
0.8
1
1.2
t [s]
h(t)
Slika 10.11: Prijelazna funkcija sustava
prijenosne funkcije G(s) = 4s+ 1
2(s+1)(s+2)
Automatsko upravljanje :: Predavanje 10 - Polovi, nule i vremenski odzivi c© 2011 Peric,Vukic,Baotic&Miškovic 16 / 61

Sustavi drugog reda Sustav drugog reda s nulom u lijevoj poluravnini
Osvrt na Primjer 10.2. i Primjer 10.3.
• Usporedbom prijelaznih funkcija u Primjeru 10.2. (Slika 10.9) i uPrimjeru 10.3. (Slika 10.11) ocito je da sustavi drugog reda s istimrasporedom polova i istim statickim pojacanjem mogu imati bitnorazlicita ponašanja ovisno o postojanju nula
• Nula u lijevoj poluravnini s-ravnine u odred_enom rasponu svojih
vrijednosti ubrzava prijelaznu pojavu u sustavu
• Može se uociti da je odziv h(t) u Primjeru 10.3. dobiven na sljedecinacin:
H(s) = 4ss(s+2)(s+1) +
2s(s+2)(s+1) → h(t) = 2g(t)Primjer 10.2. + h(t)Primjer 10.2.
• Ustvari, uz isto staticko pojacanje sustava, ukoliko bi nula bila bližeishodištu, koeficijent uz g(t)Primjer 10.2. bio bi veci pa bi prijelaznafunkcija h(t) imala vece nadvišenje
• Obrnuti efekt dogad_ao bi se udaljavanjem nule od ishodišta u
smjeru negativne realne osi; koeficijent uz g(t)Primjer 10.2. približavase nuli, nadvišenje nestaje te konacno h(t) → hPrimjer 10.2.(t)
Automatsko upravljanje :: Predavanje 10 - Polovi, nule i vremenski odzivi c© 2011 Peric,Vukic,Baotic&Miškovic 17 / 61

Sustavi drugog reda Analiza sustava drugog reda bez nula
Sustav drugog reda s konjugirano-kompleksnim parompolova i bez nula (PT2S-clan)
• Opci oblik prijenosne funkcije sustava drugog reda bez nula imaoblik (ponavljanje s Predavanja 09):
G(s) =K
1ω2
ns2 + 2ζ
ωns + 1
(10-9)
gdje je:ωn – prirodna frekvencija neprigušenih oscilacija [s−1]ζ – relativni koeficijent prigušenjaK – staticko pojacanje sustava
• Kada je |ζ| < 1, polovi sustava predstavljaju konjugirano-kompleksnipar, a odziv sustava posjeduje harmonicke komponente
• Oscilatoran PT2-sustav nosi oznaku PT2S (dodatno slovo “S” u oznacipotjece od njem. Schwingungen – oscilacije)
Automatsko upravljanje :: Predavanje 10 - Polovi, nule i vremenski odzivi c© 2011 Peric,Vukic,Baotic&Miškovic 18 / 61
Sustavi drugog reda Analiza sustava drugog reda bez nula
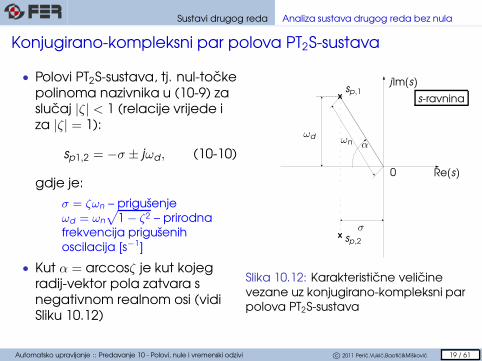
Konjugirano-kompleksni par polova PT2S-sustava
• Polovi PT2S-sustava, tj. nul-tockepolinoma nazivnika u (10-9) zaslucaj |ζ| < 1 (relacije vrijede iza |ζ| = 1):
sp1,2 = −σ ± jωd , (10-10)
gdje je:
σ = ζωn – prigušenjeωd = ωn
√
1 − ζ2 – prirodnafrekvencija prigušenihoscilacija [s−1]
• Kut α = arccosζ je kut kojegradij-vektor pola zatvara snegativnom realnom osi (vidiSliku 10.12)
0
sp,1
sp,2
s-ravnina
j Im(s)
Re(s)
ωn α
σ
ωd
Slika 10.12: Karakteristicne velicinevezane uz konjugirano-kompleksni parpolova PT2S-sustava
Automatsko upravljanje :: Predavanje 10 - Polovi, nule i vremenski odzivi c© 2011 Peric,Vukic,Baotic&Miškovic 19 / 61
Sustavi drugog reda Analiza sustava drugog reda bez nula
Primjeri sustava koje se može modelirati PT2-sustavom
• Neki primjeri sustava koje se može prikazati prijenosnomfunkcijom (10-9):
• RLC krug• Mehanicki oscilatorni sustav (masa, opruga, prigušivac)• Istosmjerni motor s nezavisnom i konstantnom uzbudom• Segment cijevi za transport fluida
Automatsko upravljanje :: Predavanje 10 - Polovi, nule i vremenski odzivi c© 2011 Peric,Vukic,Baotic&Miškovic 20 / 61

Sustavi drugog reda Analiza sustava drugog reda bez nula
Odnos izmed_u položaja polova i vremenskog odziva
PT2-sustava (1)
• U ovisnosti o položaju polova PT2-sustava u kompleksnoj ravnini (tj.o iznosima ζ i ωn) dobiju se slucajevi prikazani sljedecom tablicom(odzivi su prikazani za K = 1)
Relativni koeficijent Položaj polova Prijelazna funkcija h(t)prigušenja
0 < ζ < 1-1.5 -1 -0.5 0 0.5 1 1.5
-1
-0.5
0.5
1
Re( )
n
s
ω
Im( )
n
s
ω
0.5ζ =
0.1ζ =
0.5ζ =0.1ζ =
ntω
( )nh tω
ζ = 1-1.5 -1 -0.5 0 0.5 1 1.5
-1
-0.5
0.5
1Im( )
n
s
ω
Re( )
n
s
ω1
5 100
0.2
0.4
0.6
0.8
1( )nh tω
ntω
Automatsko upravljanje :: Predavanje 10 - Polovi, nule i vremenski odzivi c© 2011 Peric,Vukic,Baotic&Miškovic 21 / 61

Sustavi drugog reda Analiza sustava drugog reda bez nula
Odnos izmed_u položaja polova i vremenskog odziva
PT2-sustava (2)
Relativni koeficijent Položaj polova Prijelazna funkcija h(t)prigušenja
ζ > 1-9 -8 -7 -6 -5 -4 -3 -2 -1 0
-3
-2
-1
1
2
3
-101
5ζ =
2ζ =
Im( )
n
s
ω
Re( )
n
s
ω
ntω
( )nh tω2ζ =
5ζ =
ζ = 0-1 -0.5 0.5 1
-1
-0.5
0
0.5
1
Re( )
n
s
ω
Im( )
n
s
ω
1
0 5 10
0.2
0.4
0.6
0.8
1
1.2
1.4
1.6
1.8
2
ntω
( )nh tω
−1 < ζ < 0-1 -0.5 0 0.5 1
-1
-0.5
0.5
1
0.1ζ = −
1 Re( )
n
s
ω
Im( )
n
s
ω ( )nh tω
ntω
Automatsko upravljanje :: Predavanje 10 - Polovi, nule i vremenski odzivi c© 2011 Peric,Vukic,Baotic&Miškovic 22 / 61

Sustavi drugog reda Analiza sustava drugog reda bez nula
Odzivi PT2-sustava za razne vrijednosti ζ (1)
• 0 < ζ < 1 (PT2S vladanje)
sp1,2 = −ζωn ± jωn
√
1 − ζ2
• U ovom je slucaju prijelazna funkcija:
h(t) = 1−e−ζωnt
cos[(
ωn
√
1 − ζ2)
t]
+ζ
√
1 − ζ2sin
[(
ωn
√
1 − ζ2)
t]
(10-11)• Jednadžba (10-11) može se zapisati i na sljedeci nacin:
h(t) = 1 − e−
σ︷︸︸︷
ζωn t
√
1 − ζ2sin
(
ωn
√
1 − ζ2)
︸ ︷︷ ︸
ωd
t + arccosζ︸ ︷︷ ︸
α
(10-12)
• Odavde slijedi
g(t) =dh(t)
dt=
ωn√
1 − ζ2e−σt sin(ωdt) (10-13)
Automatsko upravljanje :: Predavanje 10 - Polovi, nule i vremenski odzivi c© 2011 Peric,Vukic,Baotic&Miškovic 23 / 61
Sustavi drugog reda Analiza sustava drugog reda bez nula
Odzivi PT2-sustava za razne vrijednosti ζ (2)
• 0 < ζ < 1 (PT2S vladanje)
• Granicni slucaj ζ = 0:
h(t) = 1 − cos(ωnt),g(t) = ωn sin(ωnt),
(10-14)
(sp1,2 = ±jωn, trajni oscilatorni odziv)
• Granicni slucaj ζ = 1:
h(t) = 1 − (1 + ωnt)e−ωnt ,
g(t) = ω2nte−ωnt ,
(10-15)
(sp1,2 = −ωn, granicni aperiodski odziv)
Automatsko upravljanje :: Predavanje 10 - Polovi, nule i vremenski odzivi c© 2011 Peric,Vukic,Baotic&Miškovic 24 / 61

Sustavi drugog reda Analiza sustava drugog reda bez nula
Odzivi PT2-sustava za razne vrijednosti ζ (3)
• 0 < ζ < 1 (PT2S vladanje)• Na temelju provedenih razmatranja slijedi da je relativni koeficijent
prigušenja ζ glavni cimbenik koji odred_uje oscilatornost sustava, dok
prirodna frekvencija neprigušenih oscilacija ωn odred_uje brzinu odziva
sustava• To je ilustrirano grafovima g(t) i h(t) na Slici 10.13 i Slici 10.14, uz
parametar ζ
0ζ =
0.7ζ = 0.5ζ =0.4ζ =0.3ζ =0.2ζ =0.1ζ =
1ζ =ntω
( ) /n ng tω ω
Slika 10.13: Težinska funkcijaPT2S-sustava za razne rijednosti ζ
0ζ =
0.5ζ =0.4ζ =0.3ζ =0.2ζ =0.1ζ =
0.7ζ =1ζ =
ntω
( )nh tω
Slika 10.14: Prijelazna funkcijaPT2S-sustava za razne rijednosti ζ
Automatsko upravljanje :: Predavanje 10 - Polovi, nule i vremenski odzivi c© 2011 Peric,Vukic,Baotic&Miškovic 25 / 61
Sustavi drugog reda Analiza sustava drugog reda bez nula
Odzivi PT2-sustava za razne vrijednosti ζ (4)
• 0 < ζ < 1 (PT2S vladanje)
• Prigušivanje oscilatornog tijeka opisuje se pomocu
Td =1
ζωn(10-16)
te se stoga Td naziva vremenskom konstantom prigušivanja• Iz položaja polova sp1 i sp2 od G(s) dade se Td neposredno odrediti
(Td = 1σ
), ili ga se pak može odrediti pomocu tangente anvelopeoscilatorne prijelazne funkcije
Automatsko upravljanje :: Predavanje 10 - Polovi, nule i vremenski odzivi c© 2011 Peric,Vukic,Baotic&Miškovic 26 / 61
Sustavi drugog reda Analiza sustava drugog reda bez nula
Odzivi PT2-sustava za razne vrijednosti ζ (5)
• ζ > 1 (aperiodsko PT2 vladanje)
• U ovom slucaju prijenosna funkcija (10-9) ima dva negativna pola
sp1,2 = −ζωn ± ωn
√
ζ2 − 1
• Ako se definiraju vremenske konstante T1 = − 1sp,1
i T2 = − 1sp,2
slijedi
(serijski spoj dvaju PT1 clanova, tj. PT2 clan):
G(s) =1
(1 + T1s)(1 + T2s)
• Prijelazna funkcija za ζ > 1 ima oblik:
h(t) = 1 − ζ +√
ζ2 − 1
2√
ζ2 − 1e
−ωn
(
ζ+√
ζ2−1
)
t+
ζ −√
ζ2 − 1
2√
ζ2 − 1e
−ωn
(
ζ−√
ζ2−1
)
t
(10-17)
• ζ < 0 – polovi se nalaze u desnoj poluravnini pa je sustav nestabilan
Automatsko upravljanje :: Predavanje 10 - Polovi, nule i vremenski odzivi c© 2011 Peric,Vukic,Baotic&Miškovic 27 / 61

Sustavi drugog reda Analiza sustava drugog reda bez nula
Važnost odnosa izmed_u odziva i položaja polova kod
PT2-sustava
• U prijenosnoj funkciji G(s) = K1
ω2n
s2+ 2ζωn
s+1ωn i ζ u cijelosti karakteriziraju
vladanje sustava
• Ova prijenosna funkcija zadovoljavajuce dobro nadomješta iprijenosne funkcije viših redova kod kojih je:
• jedan par polova dominantan• ostali polovi relativno daleko od jω-osi (nedominantni polovi)
• U praksi je ovo cest slucaj!
Automatsko upravljanje :: Predavanje 10 - Polovi, nule i vremenski odzivi c© 2011 Peric,Vukic,Baotic&Miškovic 28 / 61
Sustavi drugog reda Analiza sustava drugog reda bez nula
Dominantna dinamika sustava
0
sp,1
sp,2
s-ravnina
j Im(s)
Re(s)
ωnα
σ
ωd
dominantnipar polovanedominantni
polovi
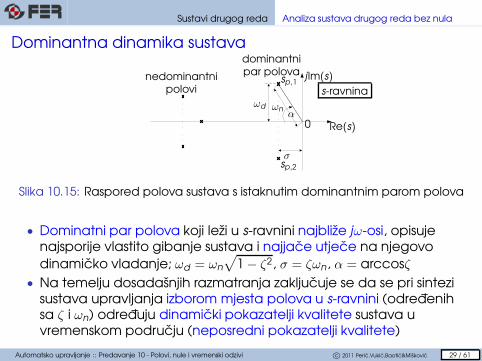
Slika 10.15: Raspored polova sustava s istaknutim dominantnim parom polova
• Dominatni par polova koji leži u s-ravnini najbliže jω-osi, opisujenajsporije vlastito gibanje sustava i najjace utjece na njegovo
dinamicko vladanje; ωd = ωn
√
1 − ζ2, σ = ζωn, α = arccosζ
• Na temelju dosadašnjih razmatranja zakljucuje se da se pri sintezisustava upravljanja izborom mjesta polova u s-ravnini (odred
_enih
sa ζ i ωn) odred_uju dinamicki pokazatelji kvalitete sustava u
vremenskom podrucju (neposredni pokazatelji kvalitete)
Automatsko upravljanje :: Predavanje 10 - Polovi, nule i vremenski odzivi c© 2011 Peric,Vukic,Baotic&Miškovic 29 / 61

Neposredni pokazatelji kvalitete sustava upravljanja
Neposredni pokazatelji kvalitete sustava upravljanja
• Pri analizi kvalitete upravljanja (regulacije) promatra se vremenskiodziv upravljane (regulirane) velicine y(t) odnosno regulacijskoodstupanje e(t) uz djelovanje odabranog ispitnog signala(pobude); u ovom razmatranju pod pobudom ce sepodrazumijevati signal referentne velicine r ili signal poremecajnevelicine z
Vladanje sobzirom na
vodećuvrijednost
Vladanje sobzirom na
smetnju
proces
ue
z
++
+
z'
r +
_
yRegulacijskiureñaj
Slika 10.16: Pojednostavljena struktura sustavaupravljanja
• Uobicajeno se kaoispitni signal koristiodskocna funkcija S(t)te se promatraprijelazna funkcija sobzirom na referentnuvelicinu y(t) = hr(t)odnosno naporemecajnu velicinuy(t) = hz(t)
Automatsko upravljanje :: Predavanje 10 - Polovi, nule i vremenski odzivi c© 2011 Peric,Vukic,Baotic&Miškovic 30 / 61

Neposredni pokazatelji kvalitete sustava upravljanjaPokazatelji kvalitete prijelazne funkcije s obzirom
Pokazatelji kvalitete hr(t)
• Za opis prijelazne funkcije hr(t) koriste se sljedeci pojmovi(neposredni pokazatelji kvalitete):
• maksimalno nadvišenje σm (engl. peak, overshoot)• vrijeme prvog maksimuma tm (engl. time to maximum overshoot)• vrijeme porasta tr (engl. rise time)• vrijeme ustaljivanja tε (engl. settling time)
0%
50%
100%
y(t)=hr(t)
tz tat50 tu tm t
2
t
tangenta utočki infleksije
W
tr
90%
10%
mσ
ε
ε
Slika 10.17: Neposredni pokazatelji kvalitete odziva sustava upravljanja naodskocnu funkciju referentne velicineAutomatsko upravljanje :: Predavanje 10 - Polovi, nule i vremenski odzivi c© 2011 Peric,Vukic,Baotic&Miškovic 31 / 61
Neposredni pokazatelji kvalitete sustava upravljanjaPokazatelji kvalitete prijelazne funkcije s obzirom
Maksimalno nadvišenje (1)
• Maksimalno nadvišenje σm=emax=Mp odred_uje iznos maksimalnog
regulacijskog odstupanja nakon prvog dostizanja stacionarnogstanja
• Za sustav drugog reda (prema prijenosnooj funkciji (10-9))maksimalno postotno nadvišenje odredeno je izrazom:
σm[%] =h(tm)− K
K· 100% = 100 · e
− ζπ√1−ζ2 (10-18)
• Izraz (10-18) dobiven je sljedecim izvodom:
dh(t)
dt= 0 → t =
kπ
ωn
√
1 − ζ2(10-19)
• Za k = 1 dobije set = tm = π
ωn
√1−ζ2
h(tm) = 1 + e− ζπ√
1−ζ2
(10-20)
Automatsko upravljanje :: Predavanje 10 - Polovi, nule i vremenski odzivi c© 2011 Peric,Vukic,Baotic&Miškovic 32 / 61

Neposredni pokazatelji kvalitete sustava upravljanjaPokazatelji kvalitete prijelazne funkcije s obzirom
Maksimalno nadvišenje (2)
• Dakle, σm ovisi jedino o relativnom koeficijentu prigušenja kaoparametru koji odred
_uje položaj konjugirano kompleksnih polova u
s-ravnini:σm = f (ζ), ζ = f−1(σm) (10-21)
100
80
60
40
20
0.1 0.2 0.3 0.50.4 0.6 0.7 0.90.8 1.00
[ ] ( )1%m fσ ζ=
ζ
Slika 10.18: Ovisnost σm o ζ
Automatsko upravljanje :: Predavanje 10 - Polovi, nule i vremenski odzivi c© 2011 Peric,Vukic,Baotic&Miškovic 33 / 61
Neposredni pokazatelji kvalitete sustava upravljanjaPokazatelji kvalitete prijelazne funkcije s obzirom
Vrijeme prvog maksimuma, vrijeme porasta
• Vrijeme prvog maksimuma tm (tm=tp) je vrijeme pri kojem sepojavljuje maksimalno nadvišenje
tm =π
ωn
√
1 − ζ2(10-22)
Napomena: prethodni izraz za tm tocan je za promatrani sustavdrugog reda, a zadovoljavajuce prihvatljiv i za sustave višeg reda
• Vrijeme porasta tr definira se kao vrijeme za koje prijelazna funkcijahr(t) poraste od vrijednosti 0 (ili 0.1hr(∞)) na vrijednost krhr(∞),gdje se u literaturi uobicajeno koristi kr = 0.9 ili kr = 1; za sustavdrugog reda (prema prijenosnoj funkciji (10-9)) i za ζ = 0.5 je:
tr ≈1.8
ωn(10-23)
Automatsko upravljanje :: Predavanje 10 - Polovi, nule i vremenski odzivi c© 2011 Peric,Vukic,Baotic&Miškovic 34 / 61

Neposredni pokazatelji kvalitete sustava upravljanjaPokazatelji kvalitete prijelazne funkcije s obzirom
Vremena porasta ta i ta,50, vrijeme zadržavanja tz , ulaznovrijeme tu
• U nastavku se obrazlažu i neke druge definicije vremena porastakoja se koriste u praksi:
• Vrijeme porasta ta dobiveno iz tocaka sjecišta tangente, povucene utocki infleksije W prijelazne funkcije hr (t), s linijama hr(0) i hr(∞)
• Cesto se koristi tangenta povucena u tocki odred_enoj vremenom t50
kod koje hr (t) poprima iznos 0, 5hr (∞) – u tom se slucaju vrijemeporasta oznacava s ta,50
• Takod_er, prakticno je definirati i pojmove vezane za neposredne
pokazatelje kvalitete sustava, a koji su bliski vremenu porasta:
• Vrijeme zadržavanja tz koje se dobije iz sjecišta prethodno definiranetangente u tocki infleksije s vremenskom osi
• Ulazno vrijeme tu kojim je odred_en trenutak prvog dostizanja hr (∞)
• Vrijedi približna relacija:tu ≈ tz + ta (10-24)
Automatsko upravljanje :: Predavanje 10 - Polovi, nule i vremenski odzivi c© 2011 Peric,Vukic,Baotic&Miškovic 35 / 61

Neposredni pokazatelji kvalitete sustava upravljanjaPokazatelji kvalitete prijelazne funkcije s obzirom
Vrijeme ustaljivanja tε
• Vrijeme ustaljivanja (smirivanja) tε (tε=ts=Ts) kojim je odred_eno
trajanje prijelaznog procesa nakon kojega hr(t) odstupa manje odzadanog iznosa ε (npr. ε = 1%, što odgovara vremenu ustaljenjat1%)
• Za vrijeme ustaljivanja vrijedi izraz:
t1% ≈ 4.6
ζωn(10-25)
Automatsko upravljanje :: Predavanje 10 - Polovi, nule i vremenski odzivi c© 2011 Peric,Vukic,Baotic&Miškovic 36 / 61

Neposredni pokazatelji kvalitete sustava upravljanjaPokazatelji kvalitete prijelazne funkcije s obzirom
Pokazatelji kvalitete s obzirom na odziv sustava naporemecajnu velicinu
• Na slican se nacin može karakterizirati i vladanje sustava s obziromna poremecajnu velicinu
• I ovdje se na isti nacin definiraju pojmovi “maksimalno nadvišenje” i“vrijeme ustaljenja”, Slika 10.19
0
100%y(t)=hz(t)
t2
t
s regulatorom
bezregulatora
εmσ ε
Slika 10.19: Neposredni pokazatelji kvalitete odziva sustava upravljanja naodskocnu funkciju poremecajne velicine
Automatsko upravljanje :: Predavanje 10 - Polovi, nule i vremenski odzivi c© 2011 Peric,Vukic,Baotic&Miškovic 37 / 61

Neposredni pokazatelji kvalitete sustava upravljanjaOsvrt na neposredne pokazatelje kvalitete
Osvrt na neposredne pokazatelje kvalitete
• Iz provedenih razmatranja slijedi da velicine σm i tε neposrednoukazuju na prigušenje sustava, dok je velicinama tu, ta, tr i tm
odred_ena brzina, odnosno dinamika sustava
• Sve prikazane velicine (neposredni pokazatelji kvalitete uvremenskom podrucju) odred
_ene su iznosima ζ i ωn koji definiraju
položaj polova u s-ravnini
• U praksi se cesto ogranicavamo na cetiri velicine i to: tu (ili tr ) , tm,tε i σm
• Relacije za odred_ivanje ovih neposrednih pokazatelja kvalitete za
sustav bez nula:tr =
1.8ωn
tm = π
ωn
√1−ζ2
t1% = 4.6ζωn
σm[%] = 100e− πζ√
1−ζ2
Automatsko upravljanje :: Predavanje 10 - Polovi, nule i vremenski odzivi c© 2011 Peric,Vukic,Baotic&Miškovic 38 / 61
Prikaz zahtjeva na sustav upravljanja u s-ravnini
Postavljanje zahtjeva na položaj polova u s-ravnini
• Na temelju povezanosti izmed_u pokazatelja kvalitete vremenskog
vladanja sustava i položaja polova sustava u s-ravnini može seizborom fizikalno prihvatljivih parametara ωn i ζ dobiti željenovladanje sustava
• Ta cinjenica predstavlja osnovu za metodu sinteze zasnovanu narasporedu polova (engl. pole placement method)
Automatsko upravljanje :: Predavanje 10 - Polovi, nule i vremenski odzivi c© 2011 Peric,Vukic,Baotic&Miškovic 39 / 61

Prikaz zahtjeva na sustav upravljanja u s-ravnini
Prikaz zahtjeva na sustav upravljanja u s-ravnini (1)
Zahtjev s obzirom namaksimalno nadvišenje σm
σm ≤ σm,max → ζ ≥ ζ0 = f−1(σm,max),α ≤ α0 = arccosζ0
α0
jω
σ
Dopuštenopodrucjepolova
Zahtjev s obzirom na vrijemeporasta tr (ta; ta,50)
tr ≤ tr,max → ωn ≥ ωn,0 = f−1(tr)
ωn,0
jω
σ
Dopuštenopodrucjepolova
Automatsko upravljanje :: Predavanje 10 - Polovi, nule i vremenski odzivi c© 2011 Peric,Vukic,Baotic&Miškovic 40 / 61

Prikaz zahtjeva na sustav upravljanja u s-ravnini
Prikaz zahtjeva na sustav upravljanja u s-ravnini (2)
Zahtjev s obzirom navrijeme ustaljivanja tε
tε ≤ tε,max → σ > σ0 = f−1(tε,max)σ0
jω
σ
Dopuštenopodrucjepolova
Cjeloviti zahtjevi s obziromna raspored polova
jω
σ
Dopuštenopodrucjepolova
Automatsko upravljanje :: Predavanje 10 - Polovi, nule i vremenski odzivi c© 2011 Peric,Vukic,Baotic&Miškovic 41 / 61

Prikaz zahtjeva na sustav upravljanja u s-ravnini Odred_ivanje ζ i ωn zatvorenog regulacijskog kr
Primjer 10.4: Zatvoreni regulacijski krug (1)
• Zatvoreni regulacijski krug prema Slici 10.20 ima prijenosne funkcijeregulatora GR(s) i procesa Gp(s):
GR(s) = KR
1 + TIs
TIs,
Gp(s) =Kp
(1 + T1s)(1 + T2s)
( )R s ( )U s ( )Y s+ ( )RG s ( )pG s-
Slika 10.20: Blokovski prikaz zatvorenogregulacijskog kruga
• Ako se odabere TI = T1, potrebno je u tom slucaju odrediti ωn i ζzatvorenog regulacijskog kruga
Automatsko upravljanje :: Predavanje 10 - Polovi, nule i vremenski odzivi c© 2011 Peric,Vukic,Baotic&Miškovic 42 / 61

Prikaz zahtjeva na sustav upravljanja u s-ravnini Odred_ivanje ζ i ωn zatvorenog regulacijskog kr
Primjer 10.4: Zatvoreni regulacijski krug (2)Rješenje (1)
• Prijenosna funkcija otvorenog regulacijskog kruga (uz TI = T1) je:
Go(s) = GR(s) · Gp(s) =KRKp
TIs(1 + T2s),
odakle slijedi prijenosna funkcija zatvorenog sustava:
Gr(s) =Go(s)
1 + Go(s)=
KRKp
TIT2s2 + TIs + KRKp=
1TIT2
KRKps2 + TI
KRKps + 1
• Opci oblik prijenosne funkcije drugog reda je
G(s) =K
1ω2
ns2 + 2ζ
ωns + 1
,
pa usporedbom koeficijenata u polinomima od Gr(s) i G(s)proizlazi:
1
ω2n
=TIT2
KRKp,
2ζ
ωn=
TI
KRKp
Automatsko upravljanje :: Predavanje 10 - Polovi, nule i vremenski odzivi c© 2011 Peric,Vukic,Baotic&Miškovic 43 / 61

Prikaz zahtjeva na sustav upravljanja u s-ravnini Odred_ivanje ζ i ωn zatvorenog regulacijskog kr
Primjer 10.4: Zatvoreni regulacijski krug (3)Rješenje (2)
ω2n =
KRKp
TIT2→ ωn =
√
KRKp
TIT2
2ζ
ωn=
TI
KRKp→ ζ =
ωnTI
2KRKp=
1
2
√
TI
KRKpT2
• Dakle, ωn i ζ ovise o parametrima procesa i o parametrimaregulatora
• Iz posljednjeg izraza slijedi
KR =1
4ζ2
1
Kp
TI
T2,
tj. pojacanje regulatora ovisi o relativnom koeficijentu prigušenja,pa se npr. za parametre procesa Kp = 10, T1 = 1 s, T2 = 0.1 s i zaodabrani ζ = 0.58 dobiva TI = 1s, KR = 0.74 i, posljedicno,ωn = 8.6 s−1
Automatsko upravljanje :: Predavanje 10 - Polovi, nule i vremenski odzivi c© 2011 Peric,Vukic,Baotic&Miškovic 44 / 61

Prikaz zahtjeva na sustav upravljanja u s-ravnini Odred_ivanje ζ i ωn zatvorenog regulacijskog kr
Primjer 10.4: Zatvoreni regulacijski krug (3)Sklopovska izvedba regulatora s operacijskim pojacalom
• Nacelna izvedba regulatora s operacijskim pojacalom prikazana jena Slici 10.21
• Izracunani parametriregulatora dobiju se,primjerice, uz otpor u ulaznojgrani pojacala R = 100 kΩ,otpor u povratnoj granipojacala R = 75 kΩ, tekapacitet C = 13 µF
povratna veza
Referentnaveličina u
3 6
750.75
100
75 10 13 10 F 1 s
R
I
K
T −
= =
= ⋅ Ω ⋅ ⋅ ≈
Slika 10.21: Izvedba regulatora sklopoms operacijskim pojacalom
Automatsko upravljanje :: Predavanje 10 - Polovi, nule i vremenski odzivi c© 2011 Peric,Vukic,Baotic&Miškovic 45 / 61

Sustav s konjugirano-kompleksnim parom polova i nulom u lijevoj poluravnini s-ravnineSustav s konjugirano-kompleksnim parom polo
Sustav drugog reda s konjugirano-kompleksnim parompolova i nulama
• Sustav drugog reda s konjugirano-kompleksnim parom polova(razmatran ranije) može sadržavati i nule koje mogu znacajnoutjecati na vremenske odzive
• Primjer 10.5: Oscilatorni sustav drugog reda s nulom u lijevojpoluravnini s-ravnine
• Prijenosna funkcija sustava kojeg se razmatra u ovome primjeru je
G(s) =ωn
β
s + βωn
s2 + 2ζωns + ω2n
(10-26)
pa pripadne težinska i prijelazna funkcija glase (|ζ| < 1):
g(t) = ωne−ζωnt
[
1β
cos(ωn
√
1 − ζ2t) +1− 1
β√1−ζ2
sin(ωn
√
1 − ζ2t)
]
, t ≥ 0
h(t) = 1 − e−ζωnt
[
cos(ωn
√
1 − ζ2t) +ζ− 1
β√1−ζ2
sin(ωn
√
1 − ζ2t)
]
, t ≥ 0
Automatsko upravljanje :: Predavanje 10 - Polovi, nule i vremenski odzivi c© 2011 Peric,Vukic,Baotic&Miškovic 46 / 61

Sustav s konjugirano-kompleksnim parom polova i nulom u lijevoj poluravnini s-ravnineSustav s konjugirano-kompleksnim parom polo
Primjer 10.5: Oscilatorni sustav drugog reda s nulom u lijevojpoluravnini s-ravnine
• Iz prethodnih izraza ocito je da utjecaj nule sN1 = −βωn slabi sporastom β (usporedite g(t) i h(t) PT2S-sustava (10-12) i (10-13) snetom navedenima izrazima za β → ∞)
• Za ilustraciju ovog efekta, na slikama 10.22 i 10.23 dani su grafovitežinskih i prijelaznih funkcija sustava G(s) (10-26) za ζ = 0.5, kojemuse parametar β mijenja u rasponu 0.25 − 10
510
-1
-0.5
0
0.5
1
1.5
2
2.5
3
3.5
4
ntω
0.25β =
0.5β =
1β =
5, 8, 10β =
( )n
n
g tωω
Slika 10.22: Težinska funkcija za raznevrijednosti β
0 5 10
0.5
1
1.5
2
2.5
ntω
( )nh tω 0.25β =
0.5β =
1β =
5, 8, 10β =
Slika 10.23: Prijelazna funkcija za raznevrijednosti β
Automatsko upravljanje :: Predavanje 10 - Polovi, nule i vremenski odzivi c© 2011 Peric,Vukic,Baotic&Miškovic 47 / 61
Kracenje nula-pol (kompenzacija utjecaja nula na dinamicko vladanje sustava)Kracenje pola pobude i nule sustava
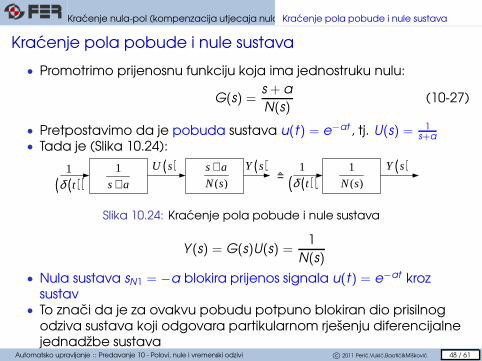
Kracenje pola pobude i nule sustava
• Promotrimo prijenosnu funkciju koja ima jednostruku nulu:
G(s) =s + a
N(s)(10-27)
• Pretpostavimo da je pobuda sustava u(t) = e−at , tj. U(s) = 1s+a
• Tada je (Slika 10.24):
=( )( )tδ1
s a+( )U s1
( )
s a
N s
+ ( )Y s
( )( )tδ1 1
( )N s
( )Y s
Slika 10.24: Kracenje pola pobude i nule sustava
Y (s) = G(s)U(s) =1
N(s)
• Nula sustava sN1 = −a blokira prijenos signala u(t) = e−at krozsustav
• To znaci da je za ovakvu pobudu potpuno blokiran dio prisilnogodziva sustava koji odgovara partikularnom rješenju diferencijalnejednadžbe sustava
Automatsko upravljanje :: Predavanje 10 - Polovi, nule i vremenski odzivi c© 2011 Peric,Vukic,Baotic&Miškovic 48 / 61
Kracenje nula-pol (kompenzacija utjecaja nula na dinamicko vladanje sustava)Kracenje nula i polova prijenosne funkcije
Kracenje nula i polova prijenosne funkcije (1)
• Nule i polovi prijenosne funkcije mogu se med_usobno kratiti ako
imaju jednake vrijednosti; kracenje nula i polova cesto se koristi usintezi sustava upravljanja
• Ne preporuca se kracenje nula i polova u desnoj poluravninis-ravnine
• Primjer 10.6.: Sustav drugog reda s parametarski zadanom nulom
G(s) =2
a
s + a
(s + 1)(s + 2)•−− g(t) = 2
a − 1
ae−t − 2
a − 2
ae−2t , ∀t ≥ 0
• Za a = 1 (kracenje pola sp1 = −1) dobije se:
G1(s) =2
s + 2•−− g1(t) = 2e−2t , ∀t ≥ 0
• Za a = 2 (kracenje pola sp2 = −2) dobije se:
G2(s) =1
s + 1•−− g2(t) = e−t , ∀t ≥ 0
Automatsko upravljanje :: Predavanje 10 - Polovi, nule i vremenski odzivi c© 2011 Peric,Vukic,Baotic&Miškovic 49 / 61

Kracenje nula-pol (kompenzacija utjecaja nula na dinamicko vladanje sustava)Kracenje nula i polova prijenosne funkcije
Primjer 10.6: Sustav drugog reda s parametarski zadanomnulom (2)
• Razmatrani sustav, s pripadnom diferencijalnom jednadžbom,
G(s) =Y (s)
U(s)=
2
a
s + a
(s + 1)(s + 2)↔ y(t)+3y(t)+2y(t) =
2
au(t)+2u(t)
ima svojstvene vrijednosti λ1 = −1 i λ2 = −2, koje se pojavljuju uslobodnom odzivu sustava (odzivu nepobud
_enog sustava, koji je
posljedica pocetnih uvjeta y(0−), y(0−)) za bilo koju vrijednostparametra a, pa tako i za a = 1 i za a = 2
• Med_utim, za a = 1 ili a = 2 odziv mirnog sustava (pocetni uvjeti = 0)
na bilo koju pobudu, koja ne sadrži u sebi komponentu e−at , necesadržavati vlastiti mod sustava e−at
• Razlog tome leži u cinjenici da svojstvena vrijednost sustava λ = −a
nije i pol prijenosne funkcije sustava – zbog kracenja nule i polaprijenosna funkcija G(s) za s = −a ne teži u beskonacno(|G(−a)| < ∞)
Automatsko upravljanje :: Predavanje 10 - Polovi, nule i vremenski odzivi c© 2011 Peric,Vukic,Baotic&Miškovic 50 / 61

Kracenje nula-pol (kompenzacija utjecaja nula na dinamicko vladanje sustava)Kracenje nula i polova prijenosne funkcije
Kracenje nula i polova prijenosne funkcije (3)
• Dakle, svaki pol je i svojstvena vrijednost sustava, no svakasvojstvena vrijednost sustava ne mora biti i pol sustava (zbogmoguceg kracenja nula i polova)
• Prijenosna funkcija je i prije i poslije moguceg kracenja nula ipolova matematicki korektna, pa ispravno opisuje izlazno-ulaznovladanje sustava, tj. dio sustava koji je istodobno i upravljiv iosmotriv
Automatsko upravljanje :: Predavanje 10 - Polovi, nule i vremenski odzivi c© 2011 Peric,Vukic,Baotic&Miškovic 51 / 61
Neminimalno-fazni sustavi
Primjer 10.7: Oscilatorni sustav drugog reda s nulom udesnoj poluravnini s-ravnine (1)
• Ponovno razmatramo prijenosnu funkciju (10-26) (vidi Primjer 10.5.):
G(s) =ωn
β
s + βωn
s2 + 2ζωns + ω2n
,
i pripadajuce težinsku i prijelaznu funkciju (|ζ| < 1):
g(t) = ωne−ζωnt
[
1β
cos(ωn
√
1 − ζ2t) +1− 1
β√1−ζ2
sin(ωn
√
1 − ζ2t)
]
, t ≥ 0
h(t) = 1 − e−ζωnt
[
cos(ωn
√
1 − ζ2t) +ζ− 1
β√1−ζ2
sin(ωn
√
1 − ζ2t)
]
, t ≥ 0
• Razmotrimo prijelaznu funkciju sustava kada je β < 0, tj. kada senula sustava sN1 = −βωn nalazi u desnoj poluravnini s-ravnine(neminimalno-fazni sustav)
Automatsko upravljanje :: Predavanje 10 - Polovi, nule i vremenski odzivi c© 2011 Peric,Vukic,Baotic&Miškovic 52 / 61
Neminimalno-fazni sustavi
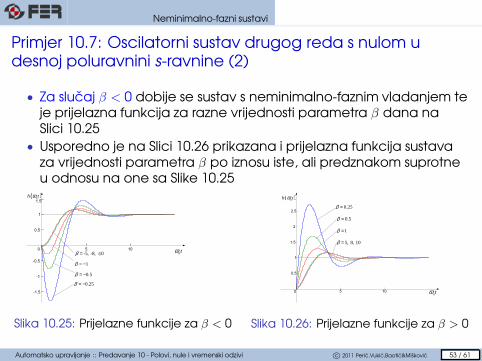
Primjer 10.7: Oscilatorni sustav drugog reda s nulom udesnoj poluravnini s-ravnine (2)
• Za slucaj β < 0 dobije se sustav s neminimalno-faznim vladanjem teje prijelazna funkcija za razne vrijednosti parametra β dana naSlici 10.25
• Usporedno je na Slici 10.26 prikazana i prijelazna funkcija sustavaza vrijednosti parametra β po iznosu iste, ali predznakom suprotneu odnosu na one sa Slike 10.25
5 10
-1.5
-1
-0.5
0
0.5
1
1.5( )nh tω
ntω
0.25β = −
0.5β = −
1β = −
-5, -8, -10β =
Slika 10.25: Prijelazne funkcije za β < 0
0 5 10
0.5
1
1.5
2
2.5
ntω
( )nh tω
0.25β =
0.5β =
1β =
5, 8, 10β =
Slika 10.26: Prijelazne funkcije za β > 0
Automatsko upravljanje :: Predavanje 10 - Polovi, nule i vremenski odzivi c© 2011 Peric,Vukic,Baotic&Miškovic 53 / 61
Neminimalno-fazni sustavi
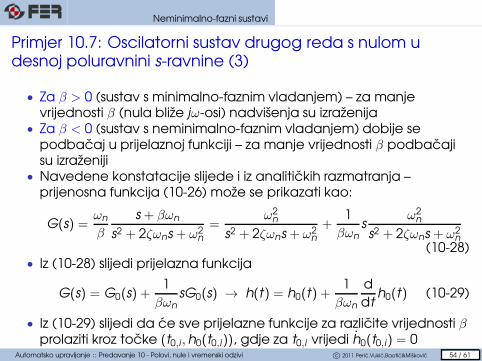
Primjer 10.7: Oscilatorni sustav drugog reda s nulom udesnoj poluravnini s-ravnine (3)
• Za β > 0 (sustav s minimalno-faznim vladanjem) – za manjevrijednosti β (nula bliže jω-osi) nadvišenja su izraženija
• Za β < 0 (sustav s neminimalno-faznim vladanjem) dobije sepodbacaj u prijelaznoj funkciji – za manje vrijednosti β podbacajisu izraženiji
• Navedene konstatacije slijede i iz analitickih razmatranja –prijenosna funkcija (10-26) može se prikazati kao:
G(s) =ωn
β
s + βωn
s2 + 2ζωns + ω2n
=ω2
n
s2 + 2ζωns + ω2n
+1
βωns
ω2n
s2 + 2ζωns + ω2n
(10-28)• Iz (10-28) slijedi prijelazna funkcija
G(s) = G0(s) +1
βωnsG0(s) → h(t) = h0(t) +
1
βωn
d
dth0(t) (10-29)
• Iz (10-29) slijedi da ce sve prijelazne funkcije za razlicite vrijednosti βprolaziti kroz tocke (t0,i ,h0(t0,i)), gdje za t0,i vrijedi h0(t0,i) = 0
Automatsko upravljanje :: Predavanje 10 - Polovi, nule i vremenski odzivi c© 2011 Peric,Vukic,Baotic&Miškovic 54 / 61
Neminimalno-fazni sustavi
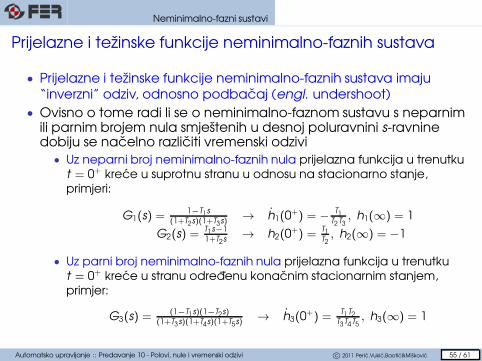
Prijelazne i težinske funkcije neminimalno-faznih sustava
• Prijelazne i težinske funkcije neminimalno-faznih sustava imaju“inverzni” odziv, odnosno podbacaj (engl. undershoot)
• Ovisno o tome radi li se o neminimalno-faznom sustavu s neparnimili parnim brojem nula smještenih u desnoj poluravnini s-ravninedobiju se nacelno razliciti vremenski odzivi
• Uz neparni broj neminimalno-faznih nula prijelazna funkcija u trenutkut = 0+ krece u suprotnu stranu u odnosu na stacionarno stanje,primjeri:
G1(s) =1−T1s
(1+T2s)(1+T3s)→ h1(0
+) = − T1T2T3
, h1(∞) = 1
G2(s) =T1s−1
1+T2s→ h2(0
+) =T1T2, h2(∞) = −1
• Uz parni broj neminimalno-faznih nula prijelazna funkcija u trenutkut = 0+ krece u stranu odred
_enu konacnim stacionarnim stanjem,
primjer:
G3(s) =(1−T1s)(1−T2s)
(1+T3s)(1+T4s)(1+T5s)→ h3(0
+) = T1T2T3T4T5
, h3(∞) = 1
Automatsko upravljanje :: Predavanje 10 - Polovi, nule i vremenski odzivi c© 2011 Peric,Vukic,Baotic&Miškovic 55 / 61
Neminimalno-fazni sustavi Primjeri neminimalno-faznih sustava
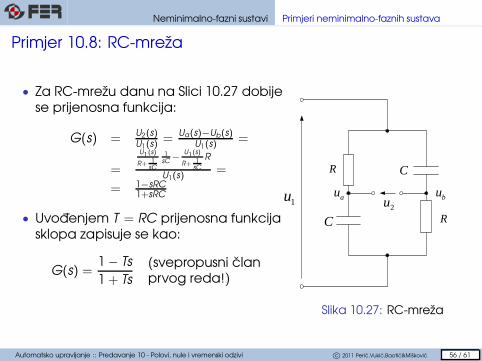
Primjer 10.8: RC-mreža
• Za RC-mrežu danu na Slici 10.27 dobijese prijenosna funkcija:
G(s) = U2(s)U1(s)
= Ua(s)−Ub(s)U1(s)
=
=
U1(s)
R+ 1sC
1sC
− U1(s)
R+ 1sC
R
U1(s)=
= 1−sRC1+sRC
• Uvod_enjem T = RC prijenosna funkcija
sklopa zapisuje se kao:
G(s) =1 − Ts
1 + Ts
(svepropusni clanprvog reda!)
1u2u
R C
RC
au bu
Slika 10.27: RC-mreža
Automatsko upravljanje :: Predavanje 10 - Polovi, nule i vremenski odzivi c© 2011 Peric,Vukic,Baotic&Miškovic 56 / 61

Neminimalno-fazni sustavi Primjeri neminimalno-faznih sustava
Primjer 10.9: Elevacija zrakoplova u letu (1)
• Prijenosna funkcija G(s) izmed_u promjene visine leta zrakoplova
∆he [m] i zakreta krilaca ψe [] na njegovim stražnjim krilima (Boeing747, Slika 10.28) dana je sljedecom relacijom:
G(s) =∆He(s)
Ψe(s)=
30(2 − s)
s(s2 + 4s + 13)
eψ
Slika 10.28: Prikaz zrakoplova i mjestazakreta krilaca
Automatsko upravljanje :: Predavanje 10 - Polovi, nule i vremenski odzivi c© 2011 Peric,Vukic,Baotic&Miškovic 57 / 61

Neminimalno-fazni sustavi Primjeri neminimalno-faznih sustava
Primjer 10.9: Elevacija zrakoplova u letu (2)
• Odziv na tipicno upravljacko djelovanje pilota na krilca pripromjeni visine leta prikazan je Slikom 10.29
5 10012345678910
5 10-500
50100150200250
0 0.5 1-1.5-1-0.50
0.51
1.5
podbačaj
[ ]meh∆
[ ]eψ °
[ ]st
[ ]st
Slika 10.29: Manevar promjene visine zrakoplova
Automatsko upravljanje :: Predavanje 10 - Polovi, nule i vremenski odzivi c© 2011 Peric,Vukic,Baotic&Miškovic 58 / 61

Neminimalno-fazni sustavi Primjeri neminimalno-faznih sustava
Primjer 10.10: Hidroelektrana (1)
Otvorprivodnog aparata
Mehaničkasnaga
Električnasnaga
Slika 10.30: Turbinsko-generatorski slog sprivodnim aparatom
• Prijenosna funkcija kojapribližno opisuje vladanjeturbinsko-generatorskog sloga sprivodnim aparatom glasi:
∆P(s)
∆X (s)=
1 − Ts
1 + 0.5Ts(10-30)
gdje je:
• ∆P(s) - promjena mehanickesnage turbine
• ∆X (s) - promjena otvoraprivodnog aparata
• T - vremenska konstantatromosti vode
Automatsko upravljanje :: Predavanje 10 - Polovi, nule i vremenski odzivi c© 2011 Peric,Vukic,Baotic&Miškovic 59 / 61

Neminimalno-fazni sustavi Primjeri neminimalno-faznih sustava
Primjer 10.10: Hidroelektrana (2)
• Privodni aparat cine pomicne lopatice cijim se zakretanjemodred
_uje protok vode kroz turbinu
• Efekt tromosti vode uzrokuje u pocetnom trenutku promjenuprotoka vode (i snage proporcionalne protoku!) suprotnog smjeraod promjene otvora privodnog aparata (zbog vece površineotvora)
Automatsko upravljanje :: Predavanje 10 - Polovi, nule i vremenski odzivi c© 2011 Peric,Vukic,Baotic&Miškovic 60 / 61
Zakljucak
Zakljucak
• Izbor mjesta polova u s-ravnini (odred_enih parametrima ζ i ωn)
odred_uje dinamicke pokazatelje kvalitete sustava u vremenskom
podrucju (neposredni pokazatelji kvalitete)• Dobivene su relacije za odred
_ivanje neposrednih pokazatelja
kvalitete sustava drugog reda bez nula:
tr =1.8ωn, tm = π
ωn
√1−ζ2
,
t1% = 4.6ζωn
, σm[%] = 100e− πζ√
1−ζ2
• Te su relacije valjane i za sustave višeg reda od dva ako je jedanpar polova sustava dominantan, a ostali polovi relativno daleko odjω-osi (nedominatni polovi)
• Nule sustava znacajno utjecu na vremenski odziv, ovisno o njihovupoložaju u odnosu na polove sustava
• Nule sustava iz desne poluravnine s-ravnine uzrokuju pojavu“inverznog odziva” zbog cega je ove sustave teško upravljati
Automatsko upravljanje :: Predavanje 10 - Polovi, nule i vremenski odzivi c© 2011 Peric,Vukic,Baotic&Miškovic 61 / 61