Asymmetric outcome in a symmetric dynamic duopoly
25
Journal of Economic Dynamics & Control 31 (2007) 531–555 Asymmetric outcome in a symmetric dynamic duopoly Sumit Joshi Department of Economics, The George Washington University, 1922 F Street N.W., Washington DC 20052, USA Received 22 March 2004; accepted 11 November 2005 Available online 14 March 2006 Abstract In a dynamic duopoly, will an initial asymmetry between firms increase or decrease over time? We examine this issue within a stochastic dynamic alternate-move duopoly model that explicitly accounts for action and reaction between firms. We consider two firms that are symmetric with regard to all primitives such as demand, cost and production functions, and which are subject to the same stochastic environment. The only asymmetry is with regard to their initial capital stocks which in turn asymmetrically influences their current and future profit and investment possibilities. We offer a characterization of the stochastic steady state and its supporting ergodic set for each firm. We are then able to identify the precise restrictions on the initial conditions under which the two firms either converge or diverge in the long run. r 2006 Elsevier B.V. All rights reserved. JEL classification: C72; C73; L13 Keywords: Dynamic duopoly; Alternate moves; Markov perfect equilibria; Asymmetry 1. Introduction In an aptly titled paper examining the evolution of a duopoly, Budd et al. (1993) posed the question, ‘‘...Does the asymmetry between firms tend to increase or ARTICLE IN PRESS www.elsevier.com/locate/jedc 0165-1889/$ - see front matter r 2006 Elsevier B.V. All rights reserved. doi:10.1016/j.jedc.2005.12.001 Tel.: +1 202 994 6154; fax: +1 202 994 6147. E-mail address: [email protected].
-
Upload
sumit-joshi -
Category
Documents
-
view
221 -
download
2
Transcript of Asymmetric outcome in a symmetric dynamic duopoly

ARTICLE IN PRESS
Journal of Economic Dynamics & Control 31 (2007) 531–555
0165-1889/$ -
doi:10.1016/j
�Tel.: +1 2
E-mail ad
www.elsevier.com/locate/jedc
Asymmetric outcome in a symmetricdynamic duopoly
Sumit Joshi�
Department of Economics, The George Washington University, 1922 F Street N.W.,
Washington DC 20052, USA
Received 22 March 2004; accepted 11 November 2005
Available online 14 March 2006
Abstract
In a dynamic duopoly, will an initial asymmetry between firms increase or decrease over
time? We examine this issue within a stochastic dynamic alternate-move duopoly model that
explicitly accounts for action and reaction between firms. We consider two firms that are
symmetric with regard to all primitives such as demand, cost and production functions, and
which are subject to the same stochastic environment. The only asymmetry is with regard to
their initial capital stocks which in turn asymmetrically influences their current and future
profit and investment possibilities. We offer a characterization of the stochastic steady state
and its supporting ergodic set for each firm. We are then able to identify the precise restrictions
on the initial conditions under which the two firms either converge or diverge in the long run.
r 2006 Elsevier B.V. All rights reserved.
JEL classification: C72; C73; L13
Keywords: Dynamic duopoly; Alternate moves; Markov perfect equilibria; Asymmetry
1. Introduction
In an aptly titled paper examining the evolution of a duopoly, Budd et al. (1993)posed the question, ‘‘. . .Does the asymmetry between firms tend to increase or
see front matter r 2006 Elsevier B.V. All rights reserved.
.jedc.2005.12.001
02 994 6154; fax: +1 202 994 6147.
dress: [email protected].

ARTICLE IN PRESS
S. Joshi / Journal of Economic Dynamics & Control 31 (2007) 531–555532
decrease?’’. In particular, if in a dynamic duopoly two firms start from asymmetricinitial conditions, can the firm that started behind catch up to the leader? Thisissue has been examined in the context of race models and its generalizationsincorporating action – reaction between firms (Harris and Vickers, 1985a,b;Reinganum, 1985; Vickers, 1986; Budd et al., 1993), models with learning-by-doing(Dasgupta and Stiglitz, 1988; Cabral and Riordan, 1994), switching costs (Farrelland Shapiro, 1988; Beggs and Klemperer, 1992) and capital accumulation (Joshi andVonortas, 2001). Our paper further contributes to this literature by developing adynamic stochastic action – reaction duopoly model and identifying the preciserestrictions on the asymmetry in initial conditions under which two firms eitherconverge or diverge in the long run. The main elements of our paper are:
1. Symmetry of primitives: We characterize the initial asymmetry which leads in thelong run to a symmetric or asymmetric outcome. In our model the initial asymmetryis with regard to the capital stock which assumes values on the set of non-negativereals, Rþ. Accordingly, we obtain a partition of Rþ so that we can give formalmeaning to ‘‘small’’ or ‘‘large’’ initial asymmetries between firms and demonstratethat whether an asymmetry will increase or decrease over time is a function of eachfirm’s initial location on this partition. In particular, we show that long runasymmetry can persist even if initial asymmetry is ‘‘small’’ and long run convergencecan ensue even if initial asymmetry is ‘‘large’’.
To focus exclusively on initial conditions as the motive force behind long runasymmetry, we consider two firms that are symmetric with regard to all primitives(demand, cost and production functions, discount factors, and the description of thestochastic environment). The asymmetry in their initial capital stocks asymmetricallyinfluences their current and future profit and investment possibilities. We obtain theoptimal investment path for each firm and characterize the stochastic steady stateand its supporting ergodic sets. With the help of the ergodic sets, we obtain apartition of the set of initial investments and examine the restrictions under whichtwo firms either converge or diverge in the long run.
By maintaining symmetry of primitives, our model stands in direct contrast to racemodels with action – reaction (Harris and Vickers, 1985a,b) where it is generally theasymmetry with regard to the primitives of the model – the discount factor, thevaluation of the prize, and the initial distance from the finishing line – that is crucialin determining the winner of the race. Long run asymmetry in our framework is afunction of initial conditions alone.
2. Action – reaction through alternate moves: As in race models, we also incorporatestrategic action – reaction between firms as the duopoly evolves. This is accomplishedthrough the notion of alternating moves and short term commitment as in Maskinand Tirole (1988a,b). Each firm invests in capital which then remains fixed for two
periods before depreciating completely.1 Therefore, there is a short run fixity to thecapital input. This short term inelasticity imparts a realistic temporal character to
1I would like to thank a referee for pointing out that the assumption of complete depreciation of capital
is not without loss of generality. I discuss in Section 5 how the analysis can be extended to a model with
depreciation.

ARTICLE IN PRESS
S. Joshi / Journal of Economic Dynamics & Control 31 (2007) 531–555 533
capital accumulation. It also implies that firms move alternately to choose a newlevel of investment in reaction to their rival’s choice of investment in the last period.Therefore, repeated strategic interaction is a key feature of our model. In addition,the alternating-move framework allows standard dynamic programming argumentsto analyze Markov perfect equilibria (MPE).2
Our model revolves around asymmetric costs resulting from unequal initialinvestments. In this sense it is similar to models relying on cost asymmetries such asthose with learning-by-doing or switching costs. In the learning-by-doing models(Dasgupta and Stiglitz, 1988; Cabral and Riordan, 1994) the focus is on theincreasing dominance of one firm. Any initial asymmetry between firms isexacerbated when learning proceeds and unit cost falls with cumulative output. Incontrast, the optimal reaction in our paper is a function of the current (and notcumulative) value of the state variable and thus both increasing and decreasingdominance are a possibility. Models with switching costs offer mixed results basedon the specification details; while Farrell and Shapiro (1988) show that asymmetrywill grow, Beggs and Klemperer (1992) demonstrate that the leader will find it morecostly to maintain or increase the gap between itself and the follower. Once again,our paper proposes a common framework to analyze both outcomes.
3. Technological uncertainty: Our framework also incorporates technologicaluncertainty. The model is general enough to interpret this uncertainty in variousways (for example, as input supply shocks to a firm’s production process, input priceshocks to a firm’s cost of production, or stochastic benefits accruing from investmentin R&D when the new technology is embodied in the capital stock). Thus the modelis malleable enough to be adapted to specific applications of oligopoly behavior inthe presence of uncertainty.
4. First passage time methods: Our alternate move capital accumulation model ofduopoly is reminiscent of the neoclassical model of optimal growth underuncertainty. We can therefore draw upon the technical insights of the growthliterature. This application involves two steps. The first step is to characterize theoptimal investment solution to each firm’s intertemporal profit-maximizationproblem. For this we adapt the elegant methods of Majumdar et al. (1989).3
The second step is to obtain each firm’s invariant distribution on the set of optimalinvestments and the supporting ergodic set. We have a choice of two alternativetechniques here: Majumdar et al. (1989) and Bhattacharya and Majumdar (2001,2004) have adapted the method of Dubins and Freedman (1966) while Razin andYahav (1979) and Mirman (1980) have used the first passage time method of Yahav(1975). While in this paper we have followed the latter,4 the former technique isequally applicable.
2The main focus of Maskin and Tirole (1988a) was to characterize the Markov perfect equilibrium of a
dynamic duopoly with short run commitment. Our focus instead is to characterize the initial conditions
under which a Markov perfect equilibrium is associated with increasing or decreasing asymmetry.3The analysis in Section 3 – particularly the critical Lemma 6 – follows the analysis of Majumdar et al.
(1989).4The analysis in Section 4 follows the first passage time method as outlined in Mirman (1980).

ARTICLE IN PRESS
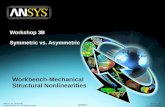
Fig. 1. Optimal investment functions in a deterministic model.
S. Joshi / Journal of Economic Dynamics & Control 31 (2007) 531–555534
We now present an informal discussion of our method, focusing on thedeterministic case for simplicity. Two firms – indexed as i and j – choose theircapital investments in alternate time periods. Firms engage in market competition inevery time period and a firm’s investment determines its unit cost of production.From dynamic programming arguments, there exists a reaction function for each firmwhich specifies the optimal investment when the firm has the discretion to move as afunction of the rival’s investment in the previous period. Thus there exists reactionfunctions fi and fj such that xi
t ¼ fiðx
jt�1Þ and x
jt�1 ¼ fj
ðxit�2Þ. Since both firms are
symmetric with respect to all primitives, we focus attention on symmetric equilibriawhere fi
¼ fj¼ f. Now for any firm, say i, xi
t ¼ fðxjt�1Þ ¼ fðfðxi
t�2ÞÞ � Cðxit�2Þ.
Therefore, we can relate a firm’s optimal investment in any period in which it has thediscretion to move to its previous investment choice while taking the rival’s optimalaction into account. We refer to C as the optimal investment function and use it togenerate the time path of capital investment for each firm. We impose conditionsunder which C has at least one fixed point. The configuration of fixed points of C

ARTICLE IN PRESS
S. Joshi / Journal of Economic Dynamics & Control 31 (2007) 531–555 535
then sheds light on whether any initial asymmetry will be sustained or obviated in thelong run.
Consider Fig. 1. In Fig. 1A, C has only one fixed point. Therefore, however‘‘large’’ the initial asymmetry in capital stocks, both firms will converge to the samesteady state level of investment and therefore to a symmetric outcome. Fig. 1Brepresents a more plausible scenario where there are multiple fixed points and herethe outcome depends crucially on the initial conditions. If both firms start either in½0;xnn� or in ½xnn;1Þ, then in spite of a ‘‘large’’ initial gap they will converge to thesame steady state. On the other hand, if one firm (say i) starts just below xnn and theother just above, then however ‘‘small’’ the initial gap, the asymmetry between firmswill grow and in the long run i will converge to xn and j to xnnn. Therefore, the fixedpoints of C form a partition of Rþ and characterize the relative initial positions offirms under which an initial asymmetry either increases or decreases. Our modelbuilds on this intuition and extends it to the stochastic case.
The paper is organized as follows. We present the model in Section 2. The optimalinvestment functions and their fixed points are presented in Section 3. The mainresults are derived in Section 4. Section 5 offers additional discussion. Section 6concludes. All proofs are in an Appendix.
2. The model
There are two firms, i and j. The competition between them takes place in discretetime, t. There are two stages in each period t. In Stage 1 – the precompetitive stage– depending on whether t is odd or even, one of the firms makes an investment incapital. Specifically, firm i chooses its capital stock in odd-numbered periods whilefirm j makes it choice in even-numbered ones.5 The capital stock for each firm thenremains fixed for two periods and then depreciates completely. Therefore, in period2tþ 1 (respectively, 2tþ 2), the capital stocks that are observed are those generatedby the current investment decision of firm i (respectively, firm j) and the previous
period 2t (respectively, period 2tþ 1) investment decision of firm j (respectively, firmi). These capital stocks determine each firm’s cost function. In Stage 2 – thecompetition stage – the two firms compete in the product market. While firms investin capital in alternate time periods, they compete in the market in every time period.
In the interests of generality, we would like to allow production uncertainty sothat a firm cannot predict ex ante the capital stock that will be generated from anygiven level of investment. Let the closed interval ½a;b�; 0oaobo1; denote thepossible states of the environment and ot 2 ½a;b� the state at date t. The stochasticenvironment is represented by the probability space ðO;F ; nÞ where O ¼
Q1t¼1 ½a;b� is
the set of all sequences o ¼ fotg, F is the s-field on O, and n is a probability measureon O. fFtg denotes the filtration on O. Let frtg denote a sequence of real-valuedindependent and identically distributed random variables on ðO;F ; nÞ where
5The analysis can be easily extended to n firms. The firms are indexed from 1 through n and firms choose
their capital stock sequentially in the order of their index.

ARTICLE IN PRESS
S. Joshi / Journal of Economic Dynamics & Control 31 (2007) 531–555536
rtðoÞ ¼ ot, tX1. Both firms face a common stochastic environment. With someabuse of notation, we will let rt denote the random variable as well as its realizationand n denote the measure induced by r on the Borel subsets of Rþ.
6 It is understoodthatwith random variables, all (in)equalities hold with probability 1.
In period t, the investment level xt of the firm (with the discretion to move) and therandom variable rt determines its capital stock kt through the production functionf : Rþ � ½a;b� ! Rþ:
kt ¼ f ðxt; rtÞ; tX1. (1)
Both firms have the same production function satisfying:
(T.1)
6For7Not
capacit
assume
capacit
to than
f is continuous on Rþ � ½a;b�:
(T.2) f ð0; rÞ ¼ 0 8r 2 ½a; b�. (T.3) f 0ðx; rÞ � qf =qx exists, f 0ðx; rÞ40 on Rþ, and f 0ð0; rÞ ¼ 1, 8r 2 ½a;b�. (T.4) f 00ðx; rÞ � q2f =qx2 exists, f 00ðx; rÞp0 on Rþ 8r 2 ½a; b�.Consider firm i. It chooses xit in any odd t. Since capital remains fixed for two
periods, it makes no investment in even t. Firm i chooses xit before observing the
realization rt. Once uncertainty is resolved, firm i’s capital stock is kit ¼ f ðxi
t; rtÞ. Itscapital stock remains the same in period tþ 1, i.e. ki
t ¼ kitþ1. Similarly, kj
t ¼ kjtþ1 for
firm j for even t. Note that for, say firm i, kit is directly affected by the realized state rt
for odd t. However, it is also indirectly influenced by the realized state rt�1 because,as we shall see, xi
t is a function of the state variable kjt�1 ¼ f ðx
jt�1; rt�1Þ. Thus, over
the infinite horizon each firm is influenced, directly or indirectly, by the entiresequence of realizations frtg.
In Stage 2, the firms compete in the product market with a constant returns toscale technology. Firms compete in the market in every period. The stocks ðki
t; kjtÞ
determine the unit cost of production for each firm. The cost function of a firm, say i,in period t is given by7
Cðkit; q
itÞ ¼ cðki
tÞqit, (2)
where qit is i’s output in period t and the unit cost function, c, is continuously
differentiable and strictly decreasing on Rþ. Let piðkit; k
jtÞ denote i’s profit function
derived from the product market equilibrium. We state our assumptions for i only(they are the same for j):
(A.1) pi is continuous on R2þ.
(A.2) pii � qpi=qki and pi
j � qpi=qkj exist. Further pii40.
any Borel set B, PrðBÞ ¼ nðfo : rðoÞ 2 BgÞ, and is denoted as nðBÞ.e that this formulation of the cost function assumes that the capital stock does not impose any
y constraints. This formulation can be defended in the current framework where it is implicitly
d that demand is fixed (by assuming time-invariant profit functions for each firm). However,
y constraints need to be explicitly incorporated in models where demand is stochastic. I would like
k an anonymous referee for pointing this out.

ARTICLE IN PRESS
S. Joshi / Journal of Economic Dynamics & Control 31 (2007) 531–555 537
Example 1. Suppose the two firms compete in quantities and demand is given byP ¼ a� qi � qj. The profit function is:
piðki; kjÞ ¼ 1
9½a� 2cðki
Þ þ cðkjÞ�2 (3)
and satisfies (A.1) and (A.2), given that c0o0.
The existence of an optimal solution requires a joint restriction on the productionand profit functions in order to ensure that positive returns from investment arepossible but not unbounded. Accordingly, we will place the following boundednessrestriction on the profit function:
(A.3) For each kjX0 there exists xðkj
Þ40, where xðkjÞ is uniformly bounded above
(by some xo1) such that expected net profit,Rpiðf ðxi; rÞ; kj
Þ � xi, is negative forxi4xðkj
Þ and positive for at least one xipxðkjÞ.
Both firms discount the future with the same discount factor d. The intertemporalpayoff of firm i is
P1t¼1 d
t�1E½piðkit; k
jtÞ � xi
t� where xit is non-zero in odd-numbered
periods and zero in even-numbered ones. Similarly for firm j. When t is odd, firm i
chooses xit after observing k
jt�1. Given the time-stationarity of the demand, cost and
the production functions, as well as the stationarity of the stochastic environment, itis natural to focus attention on time-stationary Markov strategies for each firm.8 Inparticular, when choosing its investment level, firm i only considers the state k
jt�1
which is most relevant to its current profits (instead of the history of the past capitalstocks of firm j). Therefore, the strategy function for each firm takes the form:
xi2tþ1 ¼ ci
ðkj2tÞ; x
j2t ¼ cj
ðki2t�1Þ. (4)
We consider the tuple ðci;cjÞ which constitute a MPE. The concept of perfection
dictates that for any firm, say firm i, in any odd period t, given the state kjt�1, the
function ci maximizes the discounted stream of payoffs evaluated from period t
onwards given the strategy function cj of firm j. From dynamic programmingarguments, the tuple ðci;cj
Þ is a Markov perfect equilibrium if there exists valuefunctions ðV i; JiÞ and ðVj ; JjÞ such that for firm i, ci solves:9
ViðkjÞ ¼ sup
xi2½0;x�
Z½piðf ðxi; rÞ; kj
Þ � xi� þ dZ
Jiðf ðxi; rÞÞ
� �. (5)
V i is the value function when in any odd period firm i chooses its investmentconditional on the realized capital stock of firm j from the previous period; Ji isthe value function when firm i cannot vary its capital stock while firm j can chooseits investment optimally contingent on firm i’s capital stock from the previousperiod; subsequently both firms, when they have the discretion to adjust capitalstocks, react optimally according to ðci;cj
Þ. By recursivity of the dynamic
8Maskin and Tirole (1988a) have argued that Markov strategies accord better with the notion of
‘reaction’ in industrial organization. Duffie et al. (1994) have argued that MPE can be considered as focal
in dynamic games because of their simplicity.9For notational simplicity, we will write
RF instead of
R ba F dn.

ARTICLE IN PRESS
S. Joshi / Journal of Economic Dynamics & Control 31 (2007) 531–555538
programming problem:
JiðkiÞ ¼
Zpiðki; f ðcj
ðkiÞ; rÞÞ þ d
ZV iðf ðcj
ðkiÞ; rÞÞ, (6)
ViðkjÞ ¼ sup
xi2½0;x�
Z½piðf ðxi; rÞ; kj
Þ � xi� þ dZ
piðki; f ðcjðkiÞ; rÞÞ
�þd2
ZV iðf ðcj
ðkiÞ; rÞÞ
�. ð7Þ
Given the symmetry between firms, we confine attention to symmetric equilibriawhere ci
¼ cj¼ c.
We now conduct the analysis for firm i (it is identical for j). From standardarguments, the value functions are continuous. Given kj40, let Fðkj
Þ denote the setof values of xi which achieve the supremum in (5). The continuity of pi and Ji andthe compactness of ½0; x� ensures that Fðkj
Þ is non-empty and c is a selection fromthis set. Since we do not know whether profit functions and value functions arestrictly concave, we cannot claim that c is unique. Consequently, define theminimum and maximum selections from this set as follows:
cðkjÞ ¼ minfx : x 2 Fðkj
Þg; cðkjÞ ¼ maxfx : x 2 Fðkj
Þg.
We note that these selections are well-defined and refer to them as optimal strategy
functions.10
Let ðki; kjÞ be some historically given capital stocks for the two firms at t ¼ 0.
Given an initial capital stock kj and a selection c for the rival firm, we will say thatthe sequence fðxi
t; kitÞg is feasible for firm i if:
(F.1)
10Fro
fixed k
follows
xit ¼ 0, ki
t ¼ kit�1, ki
0 ¼ ki, for even-numbered t.
(F.2) xit is Ft�1-measurable and kit is F t-measurable.
(F.3)
xit 2 ½0; x�, and kit ¼ f ðxit; rtÞ for odd-numbered t.
Conditions (F.1) – (F.3) state formally that firms invest in alternate periods, thatfirms take into account all information up to that point in time when they aremaking an investment choice, and that capital depreciates fully in two periods. LetDðkj ;cÞ denote the set of feasible sequences for firm i given kj and c. It is easilyverified that Dðkj ;cÞ is non-empty and compact by virtue of (T.1) and (A.3). Theoptimal sequence is the one that maximizes the discounted stream of expected profits,P1
t¼1 dt�1E½piðki
t; kjtÞ � xi
t�, over the set Dðkj ;cÞ. In a symmetric equilibrium, given kj
and a selection c for j, the optimal sequence in Dðkj ;cÞ is the one generated by firm i
following the optimal strategy function c as well.
m the Berge maximum theorem, F is a upper-semicontinuous correspondence. Therefore, for aj , Fðkj
Þ is a closed set. Since FðkjÞ � ½0; x�, it is a bounded set as well and therefore compact. It
that the minimum and maximum selections from FðkjÞ are well-defined.

ARTICLE IN PRESS
S. Joshi / Journal of Economic Dynamics & Control 31 (2007) 531–555 539
3. Optimal investment functions
We start with a (weak) monotonicity property of c. This property will require arestriction on the cross-partial of the profit function:
(A.4) Let pii;jðk
i; kjÞ � q2pi=qkiqkj. Either pi
i;jðki; kjÞo0 8ðki; kj
Þ 2 R2þ or pi
i;jðki;
kjÞ40 8ðki; kj
Þ 2 R2þ.
(A.4) states that the capital stocks of the two firms should either be strategic
substitutes or complements i.e. an increase in kj , respectively, decreases or increasesthe marginal profits of i.11 Such a cross-restriction is well-known in duopoly models(Bulow et al., 1985). Note that in Example 1, ðki; kj
Þ are strategic substitutes.
Theorem 1. Let bkj4ekj and (T.1) – (T.4), (A.1) – (A.4) hold. Then cðbkjÞpðresp.XÞ
cðekjÞ if ðki; kj
Þ are strategic substitutes (resp. complements).
The proof follows Maskin and Tirole (1988a, Lemma 1). It is however a weakmonotonicity result. In order to strengthen it, we will assume:
(A.5) For all xj 2 ½0; x� and for all r 2 ½a;b�:
limxi#0
piiðf ðx
i; rÞ; f ðxj ; rÞÞ " 1. (8)
(A.5) is an Inada condition at the origin on the profit function. It is satisfied inExample 1 under (T.3) since c0o0. (A.5) ensures that c is interior, i.e. cðkj
Þ40 for allkj40.
Blume et al. (1982) and Santos and Vigo-Aguiar (1998) have applied the implicitfunction theorem to first order conditions to obtain the continuous differentiabilityof optimal (strategy) functions. Our framework satisfies all their restrictions except
one that requires the profit function to be non-decreasing and jointly concave inðxi; kj
Þ. We cannot claim that piðf ðxi; rÞ; kjÞ satisfies this monotonicity and concavity
restriction. However, differentiability of the strategy function significantly eases thetechnical derivation of our main results without compromising any key economicinsights. Consequently we assume that:
(A.6) For any kj40, a selection c from the set FðkjÞ is differentiable.
Note that (A.6) is not an assumption on the primitives of the model. However, wecan show that it holds in specific examples (please see the example in Section 5.1).
We now characterize the optimal investment path by the Euler equations.
Theorem 2. Let fðxit; k
itÞ 2 Dðkj ;cÞ. Under (T.1) – (T.4) and (A.1) – (A.6), the
stochastic Euler equations for firm i are
E½piiðk
it; k
jtÞf0ðxi
t; rÞ þ dpiiðk
it; k
jtþ1Þf
0ðxi
t; rÞjjFt� � 1
¼ dE½pijðk
it; k
jtþ1Þf
0ðx
jtþ1; rÞc
0ðki
tÞf0ðxi
t; rÞjjF t�.
11An earlier version of the paper considered strategic substitutes only. I would like to thank a referee for
pointing out that the analysis holds for strategic complements as well.

ARTICLE IN PRESS
S. Joshi / Journal of Economic Dynamics & Control 31 (2007) 531–555540
The LHS measures the marginal benefit from investment (increment in profits todaywhen the firm has the discretion to move and the profits tomorrow when the firmdoes not). Firm i is aware that its investment today influences j’s optimal response inthe next period which in turn has an impact on i’s profits. The RHS measures thismarginal ‘‘cost’’ of investment. The Euler equation is thus the familiar no-arbitragemarginal rule. It is useful because it allows us to prove strict monotonicity anduniqueness.
Theorem 3. Under (T.1) – (T.4) and (A.1) – (A.6):
1.
If ekj4bkj, then cðekjÞoðresp:4ÞcðbkjÞ if ðki; kjÞ are strategic substitutes (resp.
complements).
2. Given kj, let fðexit;eki
tÞg and fðbxit;bki
tÞg denote two optimal sequences in Dðkj ;cÞ. Ifexi1 ¼ bxi
1, then ðexit;eki
tÞ ¼ ðbxit;bki
tÞ.
We next introduce the reaction function. In any odd period tX1:
xit ¼ cðkj
t�1Þ ¼ cðf ðxjt�1; rÞÞ � fðxj
t�1; rÞ.
f is called a dynamic reaction function. Theorem 3 and (T.3) establish that f is eitherstrictly decreasing or strictly increasing in the rival’s investment level. The functionsf and f correspond to c and c, respectively, and are continuous in xj . Since
xjt�1 ¼ fðxi
t�2; r0Þ, we have
xit ¼ fðfðxi
t�2; r0Þ; rÞ � Cðxi
t�2; r0; rÞ
The function C is called the optimal investment function. Suppose f is strictlydecreasing. If bxi
t�14exit�1, then fðbxi
t�1; r0Þofðexi
t�1; r0Þ and:
Cðbxit�2; r
0; rÞ ¼ fðfðbxit�2; r
0Þ; rÞ4fðfðexit�2; r
0Þ; rÞ ¼ Cðexit�2; r
0; rÞ.
Therefore, C is strictly increasing in xi. The same holds true when f is strictlyincreasing. The function C is useful because it optimally relates each firm’s currentinvestment decision in the period when it has the discretion to move to its lastinvestment decision two periods back while accounting for the reaction of firm j.Once again, C andC correspond to f and f and are continuous in xi. We would liketo characterize the fixed points of the function C. In order to do this, we will needsome preliminary results. Let
f mðxÞ ¼ minr
f ðx; rÞ; f M ðxÞ ¼ maxr
f ðx; rÞ
Since f is continuous, and r is drawn from a compact interval, f m and f M are welldefined. We can now prove that:
Lemma 4. Under (T.1) – (T.4) and (A.1) – (A.6):
1.
fmðxÞ ¼ minr fðx; rÞ ¼ cðf mðxÞÞ2.
fM ðxÞ ¼ maxr fðx; rÞ ¼ cðf MðxÞÞ.
ARTICLE IN PRESS
S. Joshi / Journal of Economic Dynamics & Control 31 (2007) 531–555 541
Now consider the optimal investment function C and let
CmðxÞ ¼ minðr0;rÞ2½a;b�2
fðfðx; r0Þ; rÞ; CM ðxÞ ¼ maxðr0 ;rÞ2½a;b�2
fðfðx; r0Þ; rÞ.
Lemma 5. Under (T.1) – (T.4) and (A.1) – (A.6):
1.
CmðxÞ ¼ fmðfmðxÞÞ ¼ f2mðxÞ2.
CMðxÞ ¼ fM ðfMðxÞÞ ¼ f2M ðxÞLemma 5 plays an important role in characterizing the fixed points of C. Thecritical issue in proving the existence of a long run probability distribution on the setof investment levels is identifying the ergodic set which supports the distribution.Fixed points of C determine the boundaries of the ergodic set(s). This issue mayseem complicated here because of non-uniqueness of the optimal investmentfunctions. The following result, based on Majumdar et al. (1989, Lemma 5), istherefore crucial because it shows that the fixed points are independent of theinvestment functions used.
Lemma 6. Under (T.1) – (T.4) and (A.1) – (A.6):
1.
C;C and C have the same fixed points. 2. Cm;Cm and Cm have the same fixed points. 3. CM ;CM and CM have the same fixed points.Now define:
xmin ¼ minfxX0 : CmðxÞ ¼ xg; xmax ¼ maxfxX0 : CmðxÞ ¼ xg,
xmin ¼ minfxX0 : CMðxÞ ¼ xg; xmax ¼ maxfxX0 : CMðxÞ ¼ xg.
These fixed points are independent of the investment function by virtue of Lemma6. We note that they are well-defined. For illustration, we show this for xmin.Identical arguments apply to the other fixed points. Consider a sequence fxng # xmin
where CmðxnÞ ¼ xn for all n. Since f is continuous, the same is true of fm from themaximum theorem. Therefore
xmin ¼ limn!1
fmðfmðxnÞÞ ¼ fmðfmðxminÞÞ ¼ CmðxminÞ. (9)
A sufficient condition for Cm to have a positive (minimum) fixed point is(A.7) There exists �40 and l40 such that for all x 2 ½0; ��:
nff ðx; rÞ ¼ f mðxÞg4l. (10)
This assumption is satisfied for instance if the production function satisfies acondition of Brock and Mirman (1972) that we list formally below:
Brock –Mirman condition: The production function f is strictly increasing in r andnðaÞ40.
(A.7) is satisfied under the Brock –Mirman condition because then f mðxÞ ¼ f ðx; aÞ.Therefore, nff ðx; rÞ ¼ f mðxÞg ¼ nðaÞ40: It is also satisfied if there are only a finite

ARTICLE IN PRESS
S. Joshi / Journal of Economic Dynamics & Control 31 (2007) 531–555542
number of states which occur with positive probability as in Majumdar et al. (1989)since one of these states will minimize f.
Lemma 7. Under (T.1) – (T.4) and (A.1) – (A.7), there exists an �40 such that
CmðxÞ4x for all x 2 ð0; �Þ.
Lemma 7 implies in particular that:
CmðxÞ4x for all x 2 ð0; xminÞ; CM ðxÞ4x for all x 2 ð0; xminÞ
The next lemma examines the stability property of the maximum fixed point:
Lemma 8. Under (T.1) – (T.4) and (A.1) – (A.7):
1. CmðxÞox for all x 2 ðxmax;1Þ 2. CMðxÞox for all x 2 ðxmax;1ÞThe next lemma shows the location of the fixed points:
Lemma 9. Under (T.1) – (T.4) and (A.1) – (A.7):
xminpxmin; xmaxpxmax.
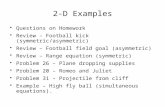
Consider Fig. 2 which shows the two kinds of cases that can arise:
Fig. 2. Optimal investment functions in a stochastic model.

ARTICLE IN PRESS
S. Joshi / Journal of Economic Dynamics & Control 31 (2007) 531–555 543
In Fig. 2A, xmaxpxmin. This is a stable fixed point configuration. In the nextsection we will see that there is only one ergodic set ½xmax; xmin� and the distributionfunctions associated with the optimal investment function converges to a uniquestationary distribution with ½xmax; xmin� as support independent of the initialconditions. Thus, irrespective of their initial asymmetry, both firms will have thesame long run distribution and we will have a symmetric outcome. The otherconfiguration that can occur is shown in Fig. 2B where xmax4xmin, an unstable fixedpoint configuration. Here we have two ergodic sets, ½xmin;xmin� and ½xmax;xmax�. Theconvergence of the distribution functions to a stationary distribution with supporton one or both of the ergodic sets will depend in general on the initial conditions.Therefore, depending on their initial locations, it is possible for two firms toconverge to different long run distributions.
4. The main result
We now examine the long run behavior of the two firms. Let Ft denote thedistribution function associated with xt:
FtðxÞ ¼ nfxtoxg. (11)
Let n2 denote the measure induced by ðr0; rÞ on the Borel subsets of R2þ. Recalling
that firms move in alternate time periods, the dynamics of the distribution functionscan be written as
Ftþ2ðxÞ ¼
ZPðy; ½0; x�ÞdFtðyÞ, (12)
where Pðy; ½0; x�Þ is the transition probability defined as
Pðy; ½0;x�Þ ¼ n2fðr0; rÞ : Cðy; r0; rÞ 2 ½0; x�g. (13)
We will now examine the convergence properties of the distribution functions. Fromnow on the random variable xi
tðxi1Þ will denote the investment level generated
according to xit ¼ Cðxi
t�2; r0; rÞ with xi
1 as the initial optimal level of investment. Toimplement the first passage time method, we will need a mild regularity restriction onthe production function and the stochastic environment.12 Specifically:
(A.8) There exists Z1; Z240 such that for all �40:
nff M ðxÞ � f ðx; rÞo�g4Z1; nff ðx; rÞ � f mðxÞo�g4Z2. (14)
Note that (A.8) will hold if the Brock –Mirman condition, along with the symmetricend-point restriction nðbÞ40, is satisfied.13
12This assumption requires sufficient variability in production and is standard in optimal growth theory.
See for example Mirman (1980, p. 548) or Majumdar et al. (1989, Assumption (T10), p. 560).13Consider the second part of (A.8). Fix any �40. From the Brock –Mirman condition, f m xð Þ ¼ f ðx; aÞ.
From (T.1), there exists roa such that f ðx; rÞ � f mðxÞo� 8r 2 ½a;r�. Letting n denote the Lebesgue
probability measure, nf f ðx; rÞ � f mðxÞo�g ¼ nf½a;r�gXnfag40. The first condition is established similarly
if nfbg40. Also, (A.8) is clearly true if r can take a finite number of values with positive probability.

ARTICLE IN PRESS
S. Joshi / Journal of Economic Dynamics & Control 31 (2007) 531–555544
Lemma 10. Assume that (T.1) – (T.4) and (A.1) – (A.8) hold. Then, for any �40, there
exists t1 and t2 such that
nðxit1ðxminÞXxmin � �Þ ¼ 1, ð15Þ
nðxit2ðxminÞpxmin þ �Þ ¼ 1. ð16Þ
Our final assumption is a standard stochastic ‘‘mixing’’ condition used inimplementing first passage time methods.14 It can be stated as:
(A.9) There exists a �40 such that
xmin � �4xmin þ �. (17)
Note that (A.9) is satisfied under the Brock –Mirman condition.15 We are nowready to prove the characterization results for the long run behavior of the duopoly.We will first consider the case where xminoxmaxshown in Fig. 2B. Our main result forthis case is:
Theorem 11. Assume that (T.1) – (T.4) and (A.1) – (A.9) hold.
1.
1
et a
inv1
tha
Cðx
For any xi1 2 ð0;xminÞ, the distribution functions FtðxÞ associated with any optimal
investment policy converges to a unique stationary distribution F ðxÞ with support on
the ergodic set ½xmin;xmin�.
2. For any xi1 2 ðxmax;1Þ, the distribution functions FtðxÞ associated with any optimal
investment policy converges to a unique stationary distribution GðxÞ with support on
the ergodic set ½xmax;xmax�.
3. For any xi1 2 ½xmin;xmax�, the distribution functions FtðxÞ associated with any
optimal investment policy converges to a stationary distribution HðxÞ with support
on the ergodic set ½xmin;xmin� [ ½xmax; xmax�.
An identical statement applies to firm j. Theorem 11 is the stochastic analog of the
deterministic argument illustrated in Fig. 1B. Consider the partition of the set ofinvestment levels,P ¼ fð0;xmin�; ðxmin; xmaxÞ; ½xmax;1Þg: If two firms start in the sameelement of this partition, then we have a symmetric outcome; otherwise, the outcomeis asymmetric. For example, if xi1;xj2 2 ð0; xmin� or xi
1;xj2 2 ½xmax;1Þ, then we have a
symmetric outcome where the optimal investment path for each firm generates thesame long run distribution with support on the same ergodic set. Thus any initialasymmetry between the two firms will disappear over time as long as they both startin either ð0;xmin� or ½xmax;1Þ. The same holds true if xi
1;xj2 2 ðxmin;xmaxÞ. This set is
unstable inthe sense that any process starting from this interval will move into one ofthe two ergodic sets ½xmin;xmin� or ½xmax; xmax�. Thus ðxmin;xmaxÞ is the stochastic
4We are using the formulation of Mirman (1980, Theorem 2). An alternative is provided in Majumdar
l. (1989, Theorem 9) in terms of the ‘‘splitting’’ of the probability measure associated with the optimal
estment path.5From the Brock –Mirman condition that f is strictly increasing in r and Theorem 3 we can infer
t Cð:; r; r0Þ is strictly increasing in ðr; r0Þ. Therefore, xmin ¼ CM ðxminÞ ¼ CM ðxmin; b; bÞXCðxmin;b;bÞ4min; a; aÞXCðxmin; a; aÞ ¼ CmðxminÞ ¼ xmin. Therefore, there exists some �40 such that (A.9) holds.

ARTICLE IN PRESS
S. Joshi / Journal of Economic Dynamics & Control 31 (2007) 531–555 545
equivalent of the unstable fixed point depicted in Fig. 1B. Once again, both firms willhave the same long run probability distribution with support on the two ergodic sets.The long run distribution is not unique, however, because we can assign positiveprobability arbitrarily to the two ergodic sets.
The interesting situations correspond to the cases where the two firms start indifferent sets inP. For example, if xi
1 2 ð0; xmin� and xj2 2 ½xmax;1Þ, then firms i and j
converge to distinct distributions F and G, respectively, with support on differentergodic sets and where G first order stochastically dominates F. Therefore, even in asymmetric equilibrium (in the sense that both firms are subject to the same primitivesand use the same optimal investment function C), the leading firm maintains strictlyhigher levels of investment (and therefore capital stocks and profits) than thefollower in the long run equilibrium. Similarly, if xi
1 2 ð0;xmin� and xj2 2 ðxmin;xmaxÞ,
then once again firms i and j converge to distinct distributions F and H. Since thesupport of H also includes the ergodic set ½xmax;xmax�, it follows that with positiveprobability firm j will maintain higher investment levels relative to firm i in the longrun equilibrium.
We now outline the main steps required to prove part 1 of Theorem 11 for theergodic set ½xmin;xmin�. The proof of parts 2 and 3 are similar. The first step shows theconvergence in distribution of optimal investment processes starting at the fixedpoints xmin and xmin.
Lemma 12. Under (T.1) – (T.4) and (A.1) – (A.7):
1.
For xi1 ¼ xmin, nðxitðxminÞpxÞ # F ðxÞ as t!1.
2.
For xi1 ¼ xmin, nðxitðxminÞpxÞ " F ðxÞ as t!1.
Further, F ðxÞ and F ðxÞ are stationary and unique.The second step invokes the joint restriction (A.8) and the mixing condition (A.9)
to show that the distribution functions generated by optimal processes starting at thefixed points xmin and xmin coincide.
Lemma 13. Under (T.1) – (T.4) and (A.1) – (A.9), F ðxÞ ¼ F ðxÞ.
Now consider the optimal process generated by any selection C in the set ofoptimal investment policies with initial condition xmin or xmin. Then
xitðxminÞpxi
tðxminÞpxitðxminÞpxi
tðxminÞ.
Therefore,
limt!1
nðxitðxminÞpxÞ ¼ lim
t!1nðxi
tðxminÞpxÞ ¼ F ðxÞ ¼ F ðxÞ ¼ F ðxÞ.
Also, for any xi1 2 ½xmin;xmin� and selection C, limt!1 nðxi
tðxi1ÞpxÞ ¼ F . It can be
verified that F is the unique distribution on this ergodic set. The final step is to showthat the set ð0;xminÞ is transient, i.e. the optimal investment process for firm i willmove from this set into the ergodic set ½xmin; xmin� for all realizations of theenvironment. Formally:

ARTICLE IN PRESS
S. Joshi / Journal of Economic Dynamics & Control 31 (2007) 531–555546
Lemma 14. Under assumptions (T.1) – (T.4) and (A.1) – (A.9), for all xi1 2 ð0;xminÞ,
and for all optimal investment policies C, there exists a to1 such that
Ctðxi1; r0; rÞXxmin for all ðr0; rÞ.
Next consider the case depicted in Fig. 2A where xmin4xmax. Following exactlythe same steps as above, we can prove:
Theorem 15. Assume that (T.1) – (T.4) and (A.1) – (A.9) hold. For any xi140, the
distribution functions F tðxÞ associated with any optimal investment policy converges to
a unique stationary distribution F ðxÞ with support on the ergodic set ½xmax; xmin�.
When the stable fixed point configuration obtains, then irrespective of the size ofthe initial gap, the two firms converge to the same distribution function with supporton the same ergodic set.
5. Discussion of the model
We now briefly elaborate on two aspects of the model.
5.1. An example
The possibility of asymmetry emerges only if C has at least two fixed points. Inthis subsection, we first construct an example that allows us to explicitly obtain anoptimal investment function. We then construct another example that shows thepossibility of multiple fixed points. We will consider the quantity competition modelof Example 1 with the added restriction that the production function is linear,16
i.e. k ¼ f ðx; rÞ ¼ xr, where r ¼ 1 or r ¼ 3 with equal probability. The firms areassumed to be risk-averse with one period return function for i given byuiðpiÞ ¼ 3
ffiffiffiffipip¼ ½a� 2cðxiÞ þ cðxjÞ�.17 The risk aversion assumption simplifies the
computation by ensuring that the one period return function is linear in the marginalcost of the two firms.
Suppose that the marginal cost function is given by cðxÞ ¼ 1=x.18 Consider thesymmetric MPE ðc;cÞ. Note from the linearity of f that c and f are the same in thesense that xi ¼ cðkj
Þ ¼ cðxjrÞ ¼ fðxj ; rÞ. Also note that uið0Þ ¼ �1 and uiið0Þ ¼ 1,
either of which is sufficient for interiority. Let xi;xj denote the possible fixed pointsof c. Then if x
jt ¼ xj , then x
jtþ1 ¼ xj and similarly for xi. Also note that c and c
correspond, respectively, to the realizations r ¼ 1 and r ¼ 3 in each period.
16Note that the linear production function satisfies (T.1) – (T.4) except the Inada condition at the origin.
This Inada condition was required for interiority. In the example here, interiority will result from the form
of the cost function.17Note that the one period return function does not satisfy (A.4), since qui=qxiqxj ¼ 0. However, it can
be verified that the minimum selection cðxÞ derived below is strictly decreasing in x. Therefore,
CðxÞ ¼ cðcðxÞÞ is strictly increasing in x.18The marginal cost function cðxÞ reflects the technology that uses capital, k (along with other inputs) to
produce output q.

ARTICLE IN PRESS
S. Joshi / Journal of Economic Dynamics & Control 31 (2007) 531–555 547
Considering the minimum selection, the equilibrium is characterized by the Eulerequations with ui replacing pi:
2uiiðx
i;xjÞ þ 2duiiðx
i; xjÞ � 1 ¼ 2duijðx
i; xjÞc0ðxiÞ (18)
and for the particular functional forms of this example:
�2d1
ðxjÞ2c0ðxiÞ ¼ ð1þ dÞ
4
ðxiÞ2� 1. (19)
But xj ¼ cðxiÞ and therefore:
�dd
dxi½lnðcðxiÞÞ
2� ¼ ð1þ dÞ
4
ðxiÞ2� 1.
We can now solve for
xj ¼ cðxiÞ ¼
ffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiexp
4ð1þ dÞ � ðxiÞ2þ kxi
dxi
� �s, (20)
where k is the constant of integration.19 Note that c is differentiable for x40. Wecan now define the optimal investment function as CðxiÞ ¼ cðcðxiÞÞ. It can bechecked that this optimal investment function only has one fixed point.
We can modify the marginal cost function above to show that there can be morethan one fixed point. In particular, let cðxÞ ¼ 1=ða1xþ a2Þ for maxf�a2=a1; 0goxoxand cð0Þ ¼ 1, where a140 and x is the uniform upper bound from (A.3). Note thatif cðxÞ ¼ x, then c2
ðxÞ ¼ cðcðxÞÞ ¼ cðxÞ ¼ x and thus x is also a fixed point of C.Substituting in (18) and solving (k is the constant of integration) yields the cubicequation:
1
6dx3 þ
a2
2dx2 þ
a22
2da1�ð2þ 3dÞ
d
� �xþ k ¼ 0. (21)
The roots of this equation are the fixed points of c. Suitably choosing the parameterswould generate more than one positive root indicating the existence of multiplefixed points.20 This example also shows the importance of the marginal cost functionin generating multiple steady states. In particular, marginal cost functions cðxÞ withhigher orders of x would generate higher order polynomial equations similar to (21)thereby increasing the number of possible fixed points.
19Since xi ¼ 0 is a zero probability event, we can arbitrarily specify any value k for cð0Þ.20Let a1 ¼ 1, a2 ¼ �1, k ¼ 0 and consider x 2 ð1; x�, x46:3. It can be shown that x ¼ 2:51 and x ¼ 6:3
are two fixed points of CðxÞ over this range. It can also be verified that CðxÞ � x40 for x 2 ð1; 2:51Þ andx46:3 whileCðxÞ � xo0 for x 2 ð2:51; 6:3Þ. Therefore, if xio6:3 and xj46:3, then firm i converges to 2.51
while firm j converges to the upper bound x. I would like to acknowledge Roberto Samaniego’s help with
MATLAB in verifying this result.

ARTICLE IN PRESS
S. Joshi / Journal of Economic Dynamics & Control 31 (2007) 531–555548
5.2. Depreciation
Our basic model had assumed that capital depreciates completely in two periods.In this section we discuss the problems associated with relaxing this assumption inthe current model and the modifications required to incorporate partial or nodepreciation.21 Let us assume for the sake of argument the polar case of nodepreciation, so that total capital stock of, say, firm i in an odd period t is Ki
t ¼
Kit�1 þ ki
t and the one period profit function becomes piðKit;K
jtÞ. With full
depreciation of capital, a firm’s current optimal decision can be linked to its optimaldecision 2 periods back when it had the discretion to move. If capital does notfully depreciate, then this linkage is lost. For instance, xi
t ¼ cðKjtÞ ¼ cðKj
t�2þ
f ðxjt�1; rt�1ÞÞ, and we cannot obtain xi
t ¼ fðxjt�1; rt�1Þ unless K
jt�2 ¼ 0. There are two
possible ways to resolve this problem:1. Full depreciation in the payoff-relevant state variable: The model can be modified
so that the variable that is relevant to payoffs and enters the optimal strategyfunction fully depreciates.22 Assume there is a homogeneous good that can be usedby a firm to augment its capital stock or invest in R&D. Let ðki
0; kj0Þ denote the
historically given capital stocks and assume that capital depreciates at the rate0oto1 in two periods. Consider firm i in any odd period t whose total ‘‘output’’ isyi
t ¼ f ðkit�2; rt�2Þ þ ð1� tÞki
t�2. The firm has to decide how to allocate yit between
R&D, xit, and the addition to the capital stock, ki
t. The amount invested in R&D iscompletely used up in determining the firm’s cost function in the product market,Cðxi
t; qitÞ ¼ cðxi
tÞqit. Firm i’s marginal cost remains cðxi
tÞ in periods t and tþ 1. Firmscan only vary their R&D investment in alternate time periods while taking intoaccount the rival firm’s R&D investment in the last period. In this set up, each firm’sone period profit is a function of the tuple ðxi;xjÞ. Thus following our earlierarguments, ðc;cÞ is a symmetric MPE where xi ¼ cðxjÞ and satisfies the Eulerconditions:
E½piiðx
it; x
jtÞ þ dpi
iðxit;cðx
itÞÞ þ dpi
jðxit;cðx
itÞÞjjF t� ¼ 0. (22)
The first passage time methods of Section 4 can now be applied.2. No depreciation in the payoff-relevant state variable: In this case, we cannot use
the first passage time method of the paper and will have to consider the entire time
path of the capital stocks for the two firms. This makes the analysis closer to the‘turnpike theory’ of the optimal growth literature which identifies sufficientconditions under which the time paths of optimal capital stocks from differentinitial conditions converge (for instance McKenzie, 1976). We show in Appendix Bhow this approach can be adapted to our framework. In particular, we obtain a
21I would like to thank an anonymous referee for motivating the problems associated with allowing less
than full depreciation of capital.22This for example is the standard specification in growth models where capital does not fully depreciate
and where the one period utility function has consumption (and not capital stocks) as its argument.

ARTICLE IN PRESS
S. Joshi / Journal of Economic Dynamics & Control 31 (2007) 531–555 549
shadow price valuation of the capital stock sequence generated by the MPE. We thenidentify a simple sufficient condition for convergence to a symmetric outcome: theshadow price of capital should remain uniformly bounded away from zero, i.e. thetwo firms should continue to put sufficient positive valuation on investment.23 Theintuition is simple: if for any firm the shadow price of capital converges to zero, thensuch a firm’s incentive to invest will fall over time; in such a situation, this firm willfall behind the other and an asymmetric outcome will ensue. While the turnpikeframework permits us to analyze convergence to symmetric outcomes by identifyinga set of sufficient conditions, it does not provide the same sharp characterization ofsymmetric versus asymmetric outcomes in terms of initial conditions as that in themain body of the paper for the full depreciation case.
6. Conclusion
The objective of this paper was to provide a dynamic duopoly framework basedon strategic action – reaction between firms in order to examine the issue of whetheran initial asymmetry between firms increased or decreased over time. Thedistinguishing feature of our framework was that it permitted a sharp characteriza-tion of the long run steady state as a function of the initial conditions. Thus wewere able to formally identify conditions under which a ‘‘small’’ initial gap betweenfirms would translate into persistent asymmetry in the long run and conditionsunder which even a ‘‘large’’ initial gap would be eradicated over time leading to asymmetric outcome.
Acknowledgements
I would like to thank three anonymous referees for their detailed comments andsuggestions that have significantly improved this version of the paper. I would alsolike to thank Roberto Samaniego for his comments and help with the numericalexample. I remain responsible for any errors.
Appendix A
Proof of Theorem 1. We will prove this for the case of strategic substitutes. Theproof is identical for strategic complements. Let bxi ¼ cðbkj
Þ and bki¼ f ðcðbkj
Þ; rÞ.Define exi and eki similarly. Suppose to the contrary that bxi4exi. From the principle of
23The requirement that shadow prices be uniformly bounded away from zero is known in the turnpike
literature as a uniformity assumption. Majumdar and Zilcha (1987) for example show how the uniformity
assumption would be satisfied under a strictly positive lower bound on the degree of concavity of the
production function. The intuition is that the shadow prices are given by the marginal product of capital
along the optimal path; therefore, a uniform positive lower bound on the concavity of the production
function bounds the shadow prices away from zero.

ARTICLE IN PRESS
S. Joshi / Journal of Economic Dynamics & Control 31 (2007) 531–555550
optimality of dynamic programming:Z½piðbki; bkj
Þ � bxi� þ dZ
JiðbkiÞX
Z½piðeki; bkj
Þ � exi� þ dZ
JiðekiÞ, (23)
Z½piðeki; ekj
Þ � exi� þ dZ
JiðekiÞX
Z½piðbki; ekj
Þ � bxi� þ dZ
JiðbkiÞ. (24)
Adding up the two equations, we getZ½piðbki; bkj
Þ þ piðeki; ekjÞ�X
Z½piðeki; bkj
Þ þ piðbki; ekjÞ�. (25)
On the other hand, since bxi4exi, from (T.3) we have bki4eki. Now consider the
marginal profits, piðbki; kjÞ � piðeki; kj
Þ. From (A.4), marginal profits are decreasing in
kj. Since bkj4ekj by assumption, it follows that:Z½piðbki; bkj
Þ � piðeki; bkjÞ�o
Z½piðbki; ekj
Þ � piðeki; ekjÞ� (26)
However, (26) contradicts (25). This proves the result. &
Proof of Theorem 2. Consider the function:
Hðx; kjÞ ¼ E½piðf ðx; rÞ; kj
Þ � xþ dpiðf ðx; rÞ; f ðcðf ðx; rÞÞ; rÞÞ�.
We claim that xi1 ¼ cðkj
Þ maximizes Hðx; kjÞ. Suppose to the contrary that someexi
1acðkjÞ maximizes Hðx; kj
Þ and let eki1 ¼ f ðexi
1; rÞ. We will also let fðxit; k
itÞg denote
the optimal sequence from xi1 when c is followed. Now consider the sequence
fðexit;eki
tÞg where, except for the first period where exi1 is chosen, ðexi
t;eki
tÞ ¼ ðxit; k
itÞ
for tX2. It is easily verified that this program satisfies (F.1) – (F.3). It then follows
that:
V ðkjÞ � E
X1t¼1
dt�1½piðeki
i;ekj
tÞ � exii�
" #¼ Hðxi
1; kjÞ �Hðexi
1; kjÞo0,
which contradicts optimality of fðxit; k
itÞg. Therefore, xi
1 ¼ cðkjÞ maximizes Hðx; kj
Þ
and the result follows from the standard first order condition for maximization. &
Proof of Theorem 3. (1) We prove this for strategic substitutes. From Theorem 1,cðekjÞpcðbkj
Þ. Now suppose that exi1 ¼ cðekj
Þ ¼ cðbkjÞ ¼ bxi
1. From the Euler equations:
E½piiðeki1;ekjÞf 0ðexi
1; rÞ þ dpiiðeki1;ekj2Þf0ðexi
1; rÞ
þ dpijðeki1;ekj2Þf0ðexj
2; rÞc0ðeki
1Þf0ðexi
1; rÞjjF1� ¼ 1,
E½piiðbki1;bkjÞf 0ðbxi
1; rÞ þ dpiiðbki1;bkj2Þf0ðbxi
1; rÞ
þ dpijðbki1;bkj2Þf0ðbxj
2; rÞc0ðbki
1Þf0ðbxi
1; rÞjjF1� ¼ 1.

ARTICLE IN PRESS
S. Joshi / Journal of Economic Dynamics & Control 31 (2007) 531–555 551
But note that:
piiðeki1;ekj2Þf0ðexi
1; rÞ ¼ piiðbki1;bkj2Þf0ðbxi
1; rÞ,
pijðeki1;ekj2Þf0ðexj
2; rÞc0ðeki
1Þf0ðexi
1; rÞ ¼ pijðbki1;bkj2Þf0ðbxj
2; rÞc0ðbki
1Þf0ðbxi
1; rÞ.
It follows from the two Euler equations that we must have:
piiðeki1;ekjÞ ¼ pi
iðbki1;bkjÞ.
However, since ekj4bkj and piijo0, it follows that pi
iðeki1;ekjÞopi
iðbki1;bkjÞ, a contra-
diction.(2) Consider the Euler equations for the two processes:
E½piiðeki1; k
jÞf 0ðexi
1; rÞ þ dpiiðeki1;ekj2Þf0ðexi
1; rÞ
þ dpijðeki1;ekj2Þf0ðexj
2; rÞc0ðeki
1Þf0ðexi
1; rÞjjF1� ¼ 1,
E½piiðbki1; k
jÞf 0ðbxi
1; rÞ þ dpiiðbki1;bkj2Þf0ðbxi
1; rÞ
þ dpijðbki1;bkj2Þf0ðbxj
2; rÞc0ðbki
1Þf0ðbxi
1; rÞjjF1� ¼ 1.
Since pii40, pi
jo0, and f 040, it follows that ekj2 ¼
bkj2. Therefore, exi
3 ¼ cðekj2Þ ¼
cðbkj2Þ ¼ bxi
3, and the result now follows by induction. &
Proof of Lemma 4. The proof follows Majumdar et al. (1989, p. 576). Sincef mðxÞpf ðx; rÞ for all r, cðf mðxÞÞpcðf ðx; rÞÞ ¼ fðx; rÞ, and therefore cðf mðxÞÞpfmðxÞ. To show the reverse inequality, note that there exists rmðxÞ such thatf mðxÞ ¼ f ðx; rmðxÞÞ. Therefore, cðf mðxÞÞ ¼ fðx; rmðxÞÞXminrfðx; rÞ ¼ fmðxÞ. Theproof of the second part is identical. &
Proof of Lemma 5. By definition, fmðxÞpfðx; r0Þ. Therefore, fmðfmðxÞÞpfðfmðxÞ; rÞpfðfðx; r0Þ; rÞ ¼ Cðx; r0; rÞ. Since this inequality holds for all ðr0; rÞ, itfollows that f2
mðxÞpCmðxÞ. To prove the reverse inequality, note using Lemma 4that there exists ðer0;erÞ such that fmðxÞ ¼ cðf mðxÞÞ ¼ cðf ðx;er0Þ and fmðfmðxÞÞ ¼
cðf mðfmðxÞÞÞ ¼ cðf ðfmðxÞ;erÞÞ: ThereforefmðfmðxÞÞ ¼ cðf mðfmðxÞÞÞ ¼ cðf ðfmðxÞ;erÞÞ ¼ cðf ðcðf ðx;er0Þ;erÞ
¼ fðfðx;er0Þ;erÞ ¼ Cðx;er0;erÞXminðr0;rÞ
Cðx; r0; rÞ ¼ CmðxÞ.
The proof the second part is identical. &
Proof of Lemma 6. Suppose Cðxn; rÞ ¼ xn but Cðxn; rÞoCðxn; rÞ on some Borel setof strictly positive measure. Now let fðbxt; bktÞg and fðext; ektÞg denote two optimalprocesses in Dðkj ;cÞ defined as bx1 ¼ ex1 ¼ xn, and for tX3: bxt ¼ Cðbxt�2Þ,ext ¼ Cðext�2Þ.Then bx3oex3 on a set of strictly positive measure. It then follows fromthe strict monotonicity of C that for all odd t:bxt ¼ Cðbxt�2ÞoCðext�2ÞpCðext�2Þ ¼ ext. (27)
But since bx1 ¼ ex1, this contradicts the uniqueness part of Theorem 3. &

ARTICLE IN PRESS
S. Joshi / Journal of Economic Dynamics & Control 31 (2007) 531–555552
Proof of Lemma 7. Suppose there is a sequence fxing # 0 where CmðxnÞ ¼ xn for some
realization of rn. Choose n large enough such that xinp� where � is given by
assumption (A.7). From the Euler equation:
E½piiðk
in; k
jÞf 0ðxi
n; rÞ þ dpiiðk
in; k
jnÞf0ðxi
n; rÞ
þ dpijðk
in; k
jnÞf0ðxj
n; rÞc0ðki
nÞf0ðxi
n; rÞjjFn� ¼ 1
and letting An ¼ fr : f ðxin; rÞ ¼ f mðx
inÞg, it follows that:
½ð1þ dÞpiiðk
inðrnÞ; k
jÞ
þ dpijðk
inðrnÞ; k
jnÞf0ðxj
n; rÞc0ðki
n� infr2An
f 0ðxin; rÞ
� �nðAnÞp1. ð28Þ
As fxing # 0 , f 0ðxi
n; rÞ " 1, contradicting the above inequality. Now suppose that forsome x 2 ð0; �Þ, we have CmðxÞox: Let fxi
ng # 0 and xinp� for all n. For any
realization in An, we will have CmðxinÞoxi
n. The same arguments as above andinequality (28) will show a contradiction. &
Proof of Lemma 8. We prove (1). The proof of (2) is identical. Suppose CmðbxiÞ4bxi
for some bxi2 ðxmax;1Þ. Then, letting xi
1 ¼ bxi, it follows that xi
3 ¼ Cmðxi1Þ4xi
1. SinceC is strictly increasing, by induction, xi
t4xit�2 for odd t. Hence, xi
t " 1 contradictingthe uniform bound on investment from (A.3). &
Proof of Lemma 9. Note that
xmin ¼ CmðxminÞpCMðxminÞ.
But from Lemma 7, this implies that xminpxmin. The proof of the secondinequality is identical. &
Proof of Lemma 10. Let CtM ¼ CMðCt�1
M Þ, C1M ¼ CM . Then Ct
MðxminÞ ! xmin ast!1. Therefore, for any �40, there exists t1 such that Ct1
M ðxminÞXxmin � e. Recallthat CM ¼ f2
M and fM ¼ cðf M Þ. Therefore, nðxitðxminÞXxmin � eÞ40 from (A.9).
The fact that it will hold with probability 1 follows from Mirman (1973, Lemma 7).The proof of the other part is identical. &
Proof of Lemma 12. (1) Define the new random variable bxt asbxtðxminÞ ¼ CðCð. . .Cðxmin; rt�1; rtÞ . . . r3; r2Þ; r2; r1Þ. (29)
By the definition of xmin, Cðxmin; rt�1; rtÞXCmðxminÞ ¼ xmin. It therefore followsthat bxtþ2ðxminÞXbxtðxminÞ and so nðbxtþ2ðxminÞpxÞpnðbxtðxminÞpxÞ. Since the invest-ment levels are bounded, bxtðxminÞ " bx1ðxminÞ with probability 1 and nðbxtðxminÞpxÞ # F ðxÞ. The result now follows for the process xtðxminÞ generated by C by notingthat xtðxminÞ and bx1ðxminÞ have the same distribution given the i.i.d. assumption. Theproof of (2) is identical. To show the stationarity of the distribution function under

ARTICLE IN PRESS
S. Joshi / Journal of Economic Dynamics & Control 31 (2007) 531–555 553
any optimal investment policy, note from the triangle inequality that:
jnðCðbx1ðxminÞ; r0; rÞpxÞ � nðbx1ðxminÞpxÞj
pjnðCðbx1ðxminÞ; r0; rÞpxÞ � nðCðbxtðxminÞ; r
0; rÞpxÞj
þ jnðCðbxtðxminÞ; r0; rÞpxÞ � nðbx1ðxminÞpxÞj.
Since CðbxtðxminÞ; r0; rÞ ¼ bxtþ2ðxminÞ, the second term on the RHS can be made
arbitrarily small using the convergence result in part (1) of this proof. Similarly, thefirst term on the RHS can be made arbitrarily small using the continuity of theminimum selection. Therefore, F ðxÞ is stationary under C. The stationarity of F ðxÞ
under any investment policy C then follows from the fact that C and C have thesame fixed points. Finally consider uniqueness. Let bF ðxÞ be any other stationarymeasure such that:
bF ðxÞ ¼ Z Pðy; ½0;x�ÞdbF ðyÞ ¼ Z nðbxtðyÞpxÞdbF ðyÞ. (30)
But nðbxtðyÞpxÞ ! F ðxÞ as t!1 from the above convergence result. Therefore,bF ðxÞ ¼ R F ðxÞdbF ðyÞ ¼ F ðxÞ proving uniqueness. &
Proof of Lemma 13. By definition, xtðxminÞpxtðxminÞpxtðxminÞ. Therefore,nðxtðxminÞpxÞXnðxtðxminÞpxÞ. In the limit, F ðxÞXF ðxÞ. Now let z1 ¼ minft :xtðxminÞXxmin � eg and z2 ¼ minft : xtðxminÞpxmin þ �g where � is given by (A.9).Note from Lemma 10 that Prðzio1Þ ¼ 1, i ¼ 1; 2. Hence, limt!1 nðxz1þtðxminÞpxÞ ¼ F ðxÞ and limt!1 nðxz2þtðxminÞpxÞ ¼ F ðxÞ. Further, using assumption (A.9):
nðxz2þtðxminÞpxÞXnðxtðxmin þ �ÞpxÞ
Xnðxtðxmin � eÞpxÞXnðxz1þtðxminÞpxÞ.
Letting t!1 then yields F ðxÞpF ðxÞ. &
Proof of Lemma 14. Suppose not. Then for all t and some e, xmin �Ctðxi1; r0; rÞ4e on
a set of positive measure. Let x2min
denote the minimum fixed point ofC. Then, from
Lemma 12, for sufficiently large t, xmin �Ctðxi1; r0; rÞoe=2 with probability 1.
Therefore, xmin � x2min
4e=2 on a set of positive measure, contradicting
xmin � x2min
p0. &
Appendix B
We will now assume that capital stocks do not depreciate and that the profitfunction is given by piðKi
t;KjtÞ. We will assume that pi is uniformly bounded from
above (by some No1) and concave in Kit. This holds for instance in Example 1
under suitable boundedness and convexity restrictions on c. Note that Kit ¼ Ki
tþ1 forodd t. The value function when i moves is now given by ViðKi;KjÞ and when it doesnot move is JiðKi;KjÞ. From standard arguments, the value functions are strictly

ARTICLE IN PRESS
S. Joshi / Journal of Economic Dynamics & Control 31 (2007) 531–555554
increasing and concave in Ki and bounded from above by N=ð1� dÞ. Now let Lit ¼
dtV i for t odd and Lit ¼ dtJi for t even. Further, let f bKi
t; bKj
tg denote the optimal
sequence of capital stocks generated by a symmetric MPE. Then:
Lemma 16. There exists a strictly positive shadow price system fpitg such that
LitðbKi
t; bKj
tÞ � pitbKi
tXLitðK
it; bKj
tÞ � pitK
it; Ki
tX0. (31)
Proof. Consider the set St ¼ fðKit;ZtÞ : ZtpLi
tðKit; bKj
tÞg. Note that St has a non-empty interior, is convex (since the value functions are concave in Ki
t) with the
boundary point ð bKi
t;LitðbKi
t; bKj
tÞÞ (since any �-neighborhood in R2þ will contain the
point ð bKi
t;LitðbKi
t; bKj
tÞ þ �Þ which does not belong to the set). Therefore, from a
standard separation theorem (Dunford and Schwartz, 1966, V. 2.8), there existsðq1; q2Það0; 0Þ such that
q1bKi
t þ q2LitðbKi
t; bKj
tÞXq1Kit þ q2Zt 8ðK
it;ZtÞ 2 intSt. (32)
By letting Kit4 bKi
t and ZtpLitðbKi
t; bKj
tÞ and noting that the value functions are
increasing in their first argument, it follows from (32) that q1p0 and q2X0. If q2 ¼ 0,
then q1o0 and from (32)KitXbKi
t, a contradiction (since a linear function cannot be
maximized over the interior of a set). Similarly, if q1 ¼ 0, then q240. Choosing
Kit4 bKi
t and LitðbKi
t; bKj
tÞoZtpLitðK
it; bKj
tÞ contradicts (32). The result follows by letting
q1=q2 � pit. &
A similar construction holds for j. Let Kt ¼ minf bKi
t; bKj
tg and note from the shadowprice characterization that
Y it � Li
tðbKi
t; bKj
tÞ � LitðKt; bKj
tÞXpit½bKi
t � Kt�,
Yjt � Lj
tðbKi
t; bKj
tÞ � LjtðbKi
t;KtÞXpjt½bKj
t � Kt�. ð33Þ
It follows that for any �40, if j bKi
t �bKj
tjX�, then either bKi
t � KtX� or bKj
t � KtX�.
Therefore, letting Y t ¼ Y it þ Y
jt, it follows that Y tXpi
t� if bKi
t �bKj
tX� and Y tXpjt� ifbKj
t �bKi
tX�. We are now ready to prove:
Theorem 17. Suppose the shadow prices are uniformly bounded away from zero, i.e.
there exists Z40 such that minfpit; p
jtgXZ for all t. Then j bKi
t �bKj
tj ! 0 as t!1.
Proof. For any �40, let l�t ¼ 0 if j bKi
t �bKj
tjo� and l�t ¼ 1 otherwise. Then for anyarbitrary T ¼ 1; 2; . . . ; �Z
PTt¼0 l
�tpPT
t¼0 Y tp2N=ð1� dÞ2. This yieldsP1
t¼0 l�to1
from the monotone convergence theorem. Therefore, l�t ! 0, i.e. for any 0ogo1,there exists tð�; gÞ such that l�tog for all tXtð�; gÞ. Since l�t is either 0 or 1, it followsthat l�t ¼ 0 for all tXtð�; gÞ. &

ARTICLE IN PRESS
S. Joshi / Journal of Economic Dynamics & Control 31 (2007) 531–555 555
References
Beggs, A., Klemperer, P., 1992. Multiperiod competition with switching costs. Econometrica 60, 651–666.
Bhattacharya, R.N., Majumdar, M., 2001. On a class of stable random dynamical systems: theory and
applications. Journal of Economic Theory 96, 208–229.
Bhattacharya, R.N., Majumdar, M., 2004. Random dynamical systems: a review. Economic Theory 23,
13–38.
Blume, L., Easley, D., O’Hara, M., 1982. Characterization of optimal plans for stochastic dynamic
programs. Journal of Economic Theory 28, 221–234.
Brock, W., Mirman, L., 1972. Optimal economic growth and uncertainty: the discounted case. Journal of
Economic Theory 4, 479–513.
Budd, C., Harris, C.J., Vickers, J.S., 1993. A model of the evolution of duopoly: does the asymmetry
between firms tend to increase or decrease? Review of Economic Studies 60, 543–573.
Bulow, J.I., Geanakoplos, J.D., Klemperer, P., 1985. Multimarket oligopoly: substitutes and
complements. Journal of Political Economy 93 (3), 488–511.
Cabral, L., Riordan, M., 1994. The learning curve, market dominance and predatory pricing.
Econometrica 62 (5), 1115–1140.
Dasgupta, P., Stiglitz, J., 1988. Learning-by-doing, market structure and industrial and trade policies.
Oxford Economic Papers 40 (2), 246–268.
Dubins, L., Freedman, D., 1966. Invariant probabilities for certain Markov processes. Annals of
Mathematical Statistics 37, 837–848.
Duffie, D., Geanakoplos, J., Mas-Colell, A., McLennan, A., 1994. Stationary Markov equilibria.
Econometrica 62 (4), 745–781.
Dunford, N., Schwartz, J., 1966. Linear Operators, Part I. Interscience, New York.
Farrell, J., Shapiro, C., 1988. Dynamic competition with switching costs. RAND Journal of Economics 19
(1), 123–137.
Harris, C., Vickers, J., 1985a. Perfect equilibrium in a model of a race. Review of Economic Studies 52,
193–209.
Harris, C., Vickers, J., 1985b. Patent races and persistence of monopoly. Journal of Industrial Economics
33, 461–481.
Joshi, S., Vonortas, N., 2001. Convergence to symmetry in dynamic strategic models of R&D: the
undiscounted case. Journal of Economic Dynamics and Control 25, 1881–1897.
Majumdar, M., Zilcha, I., 1987. Optimal growth in a stochastic environment: some sensitivity and
turnpike results. Journal of Economic Theory 43, 116–133.
Majumdar, M., Mitra, T., Nyarko, Y., 1989. Dynamic optimization under uncertainty: non-convex
feasible set. In: Feiwel, G.R. (Ed.), Joan Robinson and Modern Economic Theory. Macmillan Press,
New York.
Maskin, E., Tirole, J., 1988a. A theory of dynamic oligopoly, I: overview and quantity competition with
large fixed costs. Econometrica 56 (3), 549–569.
Maskin, E., Tirole, J., 1988b. A theory of dynamic oligopoly, II: price competition, kinked demand curves
and edgeworth cycles. Econometrica 56 (3), 571–599.
McKenzie, L.W., 1976. Turnpike theory. Econometrica 44, 841–865.
Mirman, L.J., 1980. One-sector economic growth and uncertainty: a survey. In: Dempter, M.A.H. (Ed.),
Stochastic Programming. Academic Press, New York.
Razin, A., Yahav, J.A., 1979. On stochastic models of economic growth. International Economic Review
20 (3), 599–604.
Reinganum, J.F., 1985. Innovation and industry evolution. Quarterly Journal of Economics 100 (1), 81–99.
Santos, M.S., Vigo-Aguiar, J., 1998. Analysis of a numerical dynamic programming algorithm applied to
economic models. Econometrica 66 (2), 409–426.
Vickers, J.S., 1986. The evolution of market structure when there is a sequence of innovations. Journal of
Industrial Economics 35, 1–12.
Yahav, J.A., 1975. On a fixed point theorem and its stochastic equivalent. Journal of Applied Probability
12, 605–611.