Arw v3 Technical Note

of 125
-
Upload
ruritinianromeo -
Category
Documents
-
view
232 -
download
0
Transcript of Arw v3 Technical Note
-
8/3/2019 Arw v3 Technical Note
1/125
NCAR/TN475+STRNCAR TECHNICAL NOTE
June 2008
A Description of theAdvanced Research WRF Version 3
William C. SkamarockJoseph B. KlempJimy DudhiaDavid O. GillDale M. Barker
Michael G. DudaXiang-Yu HuangWei WangJordan G. Powers
Mesoscale and Microscale Meteorology DivisionNational Center for Atmospheric Research
Boulder, Colorado, USA
-
8/3/2019 Arw v3 Technical Note
2/125
NCAR TECHNICAL NOTES
The Technical Note series provides an outlet for a variety of NCAR manuscripts that contributein specialized ways to the body of scientific knowledge but which are not suitable for journal,monograph, or book publication. Reports in this series are issued by the NCAR Scientific Di-visions; copies may be obtained on request from the Publications Office of NCAR. Designationsymbols for the series include:
EDD: Engineering, Design, or Development Reports
Equipment descriptions, test results, instrumentation,and operating and maintenance manuals.
IA: Instructional AidsInstruction manuals, bibliographies, film supplements,and other research or instructional aids.
PPR: Program Progress ReportsField program reports, interim and working reports,survey reports, and plans for experiments.
PROC: Proceedings
Documentation of symposia, colloquia, conferences, workshops,and lectures. (Distribution may be limited to attendees.)
STR: Scientific and Technical ReportsData compilations, theoretical and numericalinvestigations, and experimental results.
The National Center for Atmospheric Research (NCAR) is operated by the University Corpora-tion for Atmospheric Research (UCAR) and is sponsored by the National Science Foundation.Any opinions, findings, conclusions, or recommendations expressed in this publication are thoseof the authors and do not necessarily reflect the views of the National Science Foundation.
-
8/3/2019 Arw v3 Technical Note
3/125
Contents
Acknowledgments ix
1 Introduction 11.1 Advanced Research WRF . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 21.2 Major Features of the ARW System, Version 3 . . . . . . . . . . . . . . . . . . . 3
2 Governing Equations 72.1 Vertical Coordinate and Variables . . . . . . . . . . . . . . . . . . . . . . . . . . 72.2 Flux-Form Euler Equations . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 82.3 Inclusion of Moisture . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 92.4 Map Projections, Coriolis and Curvature Terms . . . . . . . . . . . . . . . . . . 92.5 Perturbation Form of the Governing Equations . . . . . . . . . . . . . . . . . . . 11
3 Model Discretization 133.1 Temporal Discretization . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 13
3.1.1 Runge-Kutta Time Integration Scheme . . . . . . . . . . . . . . . . . . . 133.1.2 Acoustic Integration . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 14
3.1.3 Full Time-Split Integration Sequence . . . . . . . . . . . . . . . . . . . . 173.1.4 Diabatic Forcing . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 173.1.5 Hydrostatic Option . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 18
3.2 Spatial Discretization . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 183.2.1 Acoustic Step Equations . . . . . . . . . . . . . . . . . . . . . . . . . . . 183.2.2 Coriolis and Curvature Terms . . . . . . . . . . . . . . . . . . . . . . . . 203.2.3 Advection . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 213.2.4 Pole Conditions for the Global Latitude-Longitude Grid . . . . . . . . . 24
3.3 Stability Constraints . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 243.3.1 RK3 Time Step Constraint . . . . . . . . . . . . . . . . . . . . . . . . . . 253.3.2 Acoustic Time Step Constraint . . . . . . . . . . . . . . . . . . . . . . . 253.3.3 Adaptive Time Step . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 263.3.4 Map Projection Considerations . . . . . . . . . . . . . . . . . . . . . . . 27
4 Turbulent Mixing and Model Filters 294.1 Latitude-Longitude Global Grid and Polar Filtering . . . . . . . . . . . . . . . . 294.2 Explicit Spatial Diffusion . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 30
4.2.1 Horizontal and Vertical Diffusion on Coordinate Surfaces . . . . . . . . . 304.2.2 Horizontal and Vertical Diffusion in Physical Space . . . . . . . . . . . . 31
i
-
8/3/2019 Arw v3 Technical Note
4/125
4.2.3 Computation of the Eddy Viscosities . . . . . . . . . . . . . . . . . . . . 334.2.4 TKE equation for the 1.5 Order Turbulence Closure . . . . . . . . . . . . 344.2.5 Sixth-Order Spatial Filter on Coordinate Surfaces . . . . . . . . . . . . . 35
4.3 Filters for the Time-split RK3 scheme . . . . . . . . . . . . . . . . . . . . . . . . 364.3.1 Three-Dimensional Divergence Damping . . . . . . . . . . . . . . . . . . 36
4.3.2 External Mode Filter . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 364.3.3 Semi-Implicit Acoustic Step Off-centering . . . . . . . . . . . . . . . . . . 374.4 Formulations for Gravity Wave Absorbing Layers . . . . . . . . . . . . . . . . . 37
4.4.1 Absorbing Layer Using Spatial Filtering . . . . . . . . . . . . . . . . . . 374.4.2 Implicit Rayleigh Damping for the Vertical Velocity . . . . . . . . . . . . 374.4.3 Traditional Rayleigh Damping Layer . . . . . . . . . . . . . . . . . . . . 38
4.5 Other Damping . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 394.5.1 Vertical-Velocity Damping . . . . . . . . . . . . . . . . . . . . . . . . . . 39
5 Initial Conditions 415.1 Initialization for Idealized Conditions . . . . . . . . . . . . . . . . . . . . . . . . 41
5.2 Initialization for Real-Data Conditions . . . . . . . . . . . . . . . . . . . . . . . 435.2.1 Use of the WRF Preprocessing System by the ARW . . . . . . . . . . . . 435.2.2 Reference State . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 435.2.3 Vertical Interpolation and Extrapolation . . . . . . . . . . . . . . . . . . 455.2.4 Perturbation State . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 455.2.5 Generating Lateral Boundary Data . . . . . . . . . . . . . . . . . . . . . 465.2.6 Masking of Surface Fields . . . . . . . . . . . . . . . . . . . . . . . . . . 47
5.3 Digital Filtering Initialization . . . . . . . . . . . . . . . . . . . . . . . . . . . . 475.3.1 Filter Design . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 485.3.2 DFI Schemes . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 485.3.3 Backward Integration . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 50
6 Lateral Boundary Conditions 516.1 Periodic Lateral Boundary Conditions . . . . . . . . . . . . . . . . . . . . . . . 516.2 Open Lateral Boundary Conditions . . . . . . . . . . . . . . . . . . . . . . . . . 516.3 Symmetric Lateral Boundary Conditions . . . . . . . . . . . . . . . . . . . . . . 526.4 Specified Lateral Boundary Conditions . . . . . . . . . . . . . . . . . . . . . . . 526.5 Polar Conditions . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 54
7 Nesting 557.1 Nesting Options . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 557.2 Staggering and Feedback . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 587.3 Nested Lateral Boundary Conditions . . . . . . . . . . . . . . . . . . . . . . . . 607.4 Steps to Generate a Nest Grid . . . . . . . . . . . . . . . . . . . . . . . . . . . . 61
8 Physics 658.1 Microphysics . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 65
8.1.1 Kessler scheme . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 668.1.2 Purdue Lin scheme . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 678.1.3 WRF Single-Moment 3-class (WSM3) scheme . . . . . . . . . . . . . . . 67
ii
-
8/3/2019 Arw v3 Technical Note
5/125
8.1.4 WSM5 scheme . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 678.1.5 WSM6 scheme . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 678.1.6 Eta Grid-scale Cloud and Precipitation (2001) scheme . . . . . . . . . . . 688.1.7 Thompson et al. scheme . . . . . . . . . . . . . . . . . . . . . . . . . . . 688.1.8 Goddard Cumulus Ensemble Model scheme . . . . . . . . . . . . . . . . 69
8.1.9 Morrison et al. 2-Moment scheme . . . . . . . . . . . . . . . . . . . . . . 698.2 Cumulus parameterization . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 70
8.2.1 Kain-Fritsch scheme . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 708.2.2 Betts-Miller-Janjic scheme . . . . . . . . . . . . . . . . . . . . . . . . . . 718.2.3 Grell-Devenyi ensemble scheme . . . . . . . . . . . . . . . . . . . . . . . 718.2.4 Grell-3 scheme . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 72
8.3 Surface Layer . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 728.3.1 Similarity theory (MM5) . . . . . . . . . . . . . . . . . . . . . . . . . . . 728.3.2 Similarity theory (Eta) . . . . . . . . . . . . . . . . . . . . . . . . . . . . 728.3.3 Similarity theory (PX) . . . . . . . . . . . . . . . . . . . . . . . . . . . . 73
8.4 Land-Surface Model . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 73
8.4.1 5-layer thermal diffusion . . . . . . . . . . . . . . . . . . . . . . . . . . . 738.4.2 Noah LSM . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 738.4.3 Rapid Update Cycle (RUC) Model LSM . . . . . . . . . . . . . . . . . . 748.4.4 Pleim-Xiu LSM . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 758.4.5 Urban Canopy Model . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 758.4.6 Ocean Mixed-Layer Model . . . . . . . . . . . . . . . . . . . . . . . . . . 758.4.7 Specified Lower Boundary Conditions . . . . . . . . . . . . . . . . . . . . 76
8.5 Planetary Boundary Layer . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 768.5.1 Medium Range Forecast Model (MRF) PBL . . . . . . . . . . . . . . . . 768.5.2 Yonsei University (YSU) PBL . . . . . . . . . . . . . . . . . . . . . . . . 77
8.5.3 Mellor-Yamada-Janjic (MYJ) PBL . . . . . . . . . . . . . . . . . . . . . 778.5.4 Asymmetrical Convective Model version 2 (ACM2) PBL . . . . . . . . . 78
8.6 Atmospheric Radiation . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 788.6.1 Rapid Radiative Transfer Model (RRTM) Longwave . . . . . . . . . . . . 788.6.2 Eta Geophysical Fluid Dynamics Laboratory (GFDL) Longwave . . . . . 798.6.3 CAM Longwave . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 798.6.4 Eta Geophysical Fluid Dynamics Laboratory (GFDL) Shortwave . . . . . 798.6.5 MM5 (Dudhia) Shortwave . . . . . . . . . . . . . . . . . . . . . . . . . . 808.6.6 Goddard Shortwave . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 808.6.7 CAM Shortwave . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 80
8.7 Physics Interactions . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 808.8 Four-Dimensional Data Assimilation . . . . . . . . . . . . . . . . . . . . . . . . 82
8.8.1 Grid Nudging or Analysis Nudging . . . . . . . . . . . . . . . . . . . . . 828.8.2 Observational or Station Nudging . . . . . . . . . . . . . . . . . . . . . . 83
9 Variational Data Assimilation 879.1 Introduction . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 879.2 Improvements to the WRF-Var Algorithm . . . . . . . . . . . . . . . . . . . . . 89
9.2.1 Improved vertical interpolation . . . . . . . . . . . . . . . . . . . . . . . 89
iii
-
8/3/2019 Arw v3 Technical Note
6/125
9.2.2 Improved minimization and outer loop . . . . . . . . . . . . . . . . . . 899.2.3 Choice of control variables . . . . . . . . . . . . . . . . . . . . . . . . . . 909.2.4 First Guess at Appropriate Time (FGAT) . . . . . . . . . . . . . . . . . 909.2.5 Radar Data Assimilation . . . . . . . . . . . . . . . . . . . . . . . . . . . 909.2.6 Unified Regional/Global 3D-Var Assimilation . . . . . . . . . . . . . . . 91
9.3 Background Error Covariances . . . . . . . . . . . . . . . . . . . . . . . . . . . . 929.3.1 Removal of time-mean . . . . . . . . . . . . . . . . . . . . . . . . . . . . 949.3.2 Multivariate Covariances: Regression coefficients and unbalanced variables 949.3.3 Vertical Covariances: Eigenvectors/eigenvalues and control variable pro-
jections . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 959.3.4 Horizontal Covariances: Recursive filter lengthscale (regional), or power
spectra (global) . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 959.4 WRF-Var V3.0 Software Engineering Improvements . . . . . . . . . . . . . . . . 95
9.4.1 Memory improvements . . . . . . . . . . . . . . . . . . . . . . . . . . . . 959.4.2 Four-Byte I/O . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 969.4.3 Switch from RSL to RSL LITE . . . . . . . . . . . . . . . . . . . . . . . 96
9.4.4 Reorganisation of observation structures . . . . . . . . . . . . . . . . . . 969.4.5 Radar reflectivity operators redesigned . . . . . . . . . . . . . . . . . . . 96
Appendices
A Physical Constants 97
B List of Symbols 99
C Acronyms 103
References 105
iv
-
8/3/2019 Arw v3 Technical Note
7/125
List of Figures
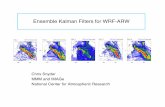
1.1 WRF system components. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 2
2.1 ARW coordinate. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 7
3.1 Time step integration sequence. Here n represents the number of acoustic timesteps for a given substep of the RK3 integration, and ns is the ratio of the RK3time step to the acoustic time step for the second and third RK3 substeps. . . . 16
3.2 Horizontal and vertical grids of the ARW . . . . . . . . . . . . . . . . . . . . . . 193.3 Latitude-longitude grid structure in the pole region. In the ARW formulation,re = y/my. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 24
5.1 Schematic showing the data flow and program components in WPS, and how WPSfeeds initial data to the ARW. Letters in the rectangular boxes indicate programnames. GEOGRID: defines the model domain and creates static files of terrestrialdata. UNGRIB: decodes GriB data. METGRID: interpolates meteorological datato the model domain. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 44
5.2 An illustration showing the three available DFI schemes: digital filter launch,diabatic digital filter initialization, and twice digital filter initialization. . . . . . 49
6.1 Specified and relaxation zones for a grid with a single specified row and column,and four rows and columns for the relaxation zone. These are typical values usedfor a specified lateral boundary condition for a real-data case. . . . . . . . . . . 53
7.1 1-way and 2-way nesting options in the ARW. . . . . . . . . . . . . . . . . . . . 56
7.2 Various nest configurations for multiple grids. (a) Telescoping nests. (b) Nests atthe same level with respect to a parent grid. (c) Overlapping grids: not allowed(d) Inner-most grid has more than one parent grid: not allowed . . . . . . . . . 57
7.3 Arakawa-C grid staggering for a portion of a parent domain and an imbeddednest domain with a 3:1 grid size ratio. The solid lines denote coarse grid cell
boundaries, and the dashed lines are the boundaries for each fine grid cell. Thehorizontal components of velocity (U and V) are defined along the normal cellface, and the thermodynamic variables () are defined at the center of the gridcell (each square). The bold typeface variables along the interface between thecoarse and the fine grid define the locations where the specified lateral boundariesfor the nest are in effect. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 59
7.4 Similar to Fig. 7.3, but with a 2:1 grid-distance ratio. . . . . . . . . . . . . . . 61
7.5 Nest grid integration sequence. . . . . . . . . . . . . . . . . . . . . . . . . . . . . 62
v
-
8/3/2019 Arw v3 Technical Note
8/125
7.6 Zones of topographic blending for a fine grid. In the fine grid, the first zone isentirely interpolated from the coarse grid topography. In the second zone, thetopography is linearly weighted between the coarse grid and the fine grid. . . . . 63
9.1 Sketch showing the relationship between datasets (circles), and algorithms (rect-angles) of the ARW system. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 88
9.2 Sketch of the role of Stage 0 converters in transforming model-specific data (e.g.,ARW, KMA global model, etc.) to standard perturbation fields and relevantmetadata (e.g., latitude, height, land/sea, etc.). . . . . . . . . . . . . . . . . . . 93
vi
-
8/3/2019 Arw v3 Technical Note
9/125
List of Tables
3.1 Maximum stable Courant numbers for one-dimensional linear advection. FromWicker and Skamarock (2002). . . . . . . . . . . . . . . . . . . . . . . . . . . . . 25
8.1 Microphysics Options . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 668.2 Cumulus Parameterization Options . . . . . . . . . . . . . . . . . . . . . . . . . 708.3 Land Surface Options . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 748.4 Planetary Boundary Layer Options . . . . . . . . . . . . . . . . . . . . . . . . . 77
8.5 Radiation Options . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 798.6 Physics Interactions. Columns correspond to model physical processes: radiation(Rad), microphysics (MP), cumulus parameterization (CP), planetary boundarylayer/vertical diffusion (PBL), and surface physics (Sfc). Rows corresponds tomodel variables where i and o indicate whether a variable is input or output(updated) by a physical process. . . . . . . . . . . . . . . . . . . . . . . . . . . . 81
vii
-
8/3/2019 Arw v3 Technical Note
10/125
viii
-
8/3/2019 Arw v3 Technical Note
11/125
Acknowledgments
Many people beyond this documents author list have contributed to the development of dy-namics and physics. For the dynamics solver development, we would like to thank Louis Wickerfor his assistance with the Runge-Kutta integration scheme; George Bryan and Jason Knievelfor contributing in the turbulent mixing algorithms and other model filters; Mark Richardson,Anthony Toigo and Claire Newman for generalizing the WRF code for global applications.
For physics contributions, we would like to thank Tom Black, John Brown, Kenneth Cam-
pana, Fei Chen, Shu-Hua Chen, Ming-Da Chou, Aijun Deng, Mike Ek, Brad Ferrier, Georg Grell,Bill Hall, Songyou Hong, Zavisa Janjic, Jack Kain, Hiroyuki Kusaka, Ruby Leung, Jeong-OckLim, Kyo-Sun Lim, Yubao Liu, Chin-Hoh Moeng, Ken Mitchell, Eli Mlawer, Hugh Morrison, JonPleim, Tanya Smirnova, Dave Stauffer, Wei-Kuo Tao, Mukul Tewari, Greg Thompson, GuentherZaengl and others. We also acknowledge the contribution by Min Chen, Ju-Won Kim, StevenPeckham, Tanya Smirnova, John Brown and Stan Benjamin for the digital filter initializationdevelopment.
The development of WRF-Var represents an international team effort. We would like toacknowledge the following people for their contributions to the WRF-Var system: Yong-RunGuo, Wei Huang, Qingnong Xiao, Syed Rizvi, Francois Vandenberghe, Mike McAtee, Roy Peck,
Wan-Shu Wu, Dezso Devenyi, Jianfeng Gu, Mi-Seon Lee, Ki-Han Youn, Eunha Lim, Hyun-Cheol Shin, Shu-Hua Chen, Hui-Chuan Lin, John Bray, Xin Zhang, Zhiquan Liu, Tom Auligne,Xianyan Zhang, and Yongsheng Chen.
We would like express our appreciation to John Michalakes for developing the WRF SoftwareFramework. We would also like thank Jacques Middlecoff, Tom Henderson, Al Bourgeois, MattBettencourt, Todd Hutchinson, Kent Yang, and Dan Schaffer for their contributions to thesoftware development.
Finally, we would like to thank George Bryan, Jim Bresch, Jian-Wen Bao and John Brownfor their careful review of this document. We also thank Cindy Bruyere for assistance with thegraphics.
The Weather Research and Forecasting model effort is supported by the National ScienceFoundation, the Department of Defense, the National Oceanic and Atmospheric Administration,and the Federal Aviation Administration.
ix
-
8/3/2019 Arw v3 Technical Note
12/125
x
-
8/3/2019 Arw v3 Technical Note
13/125
Chapter 1Introduction
The Weather Research and Forecasting (WRF) model is a numerical weather prediction (NWP)and atmospheric simulation system designed for both research and operational applications.WRF is supported as a common tool for the university/research and operational communitiesto promote closer ties between them and to address the needs of both. The development ofWRF has been a multi-agency effort to build a next-generation mesoscale forecast model anddata assimilation system to advance the understanding and prediction of mesoscale weather andaccelerate the transfer of research advances into operations. The WRF effort has been a collab-orative one among the National Center for Atmospheric Researchs (NCAR) Mesoscale and Mi-croscale Meteorology (MMM) Division, the National Oceanic and Atmospheric Administrations(NOAA) National Centers for Environmental Prediction (NCEP) and Earth System ResearchLaboratory (ESRL), the Department of Defenses Air Force Weather Agency (AFWA) and NavalResearch Laboratory (NRL), the Center for Analysis and Prediction of Storms (CAPS) at theUniversity of Oklahoma, and the Federal Aviation Administration (FAA), with the participationof university scientists.
WRF reflects flexible, state-of-the-art, portable code that is efficient in computing environ-ments ranging from massively-parallel supercomputers to laptops. Its modular, single-sourcecode can be configured for both research and operational applications. Its spectrum of physicsand dynamics options reflects the experience and input of the broad scientific community. ItsWRF-Var variational data assimilation system can ingest a host of observation types in pursuitof optimal initial conditions, while its WRF-Chem model provides a capability for air chemistrymodeling.
WRF is maintained and supported as a community model to facilitate wide use interna-tionally, for research, operations, and teaching. It is suitable for a broad span of applicationsacross scales ranging from large-eddy to global simulations. Such applications include real-timeNWP, data assimilation development and studies, parameterized-physics research, regional cli-
mate simulations, air quality modeling, atmosphere-ocean coupling, and idealized simulations.As of this writing, the number of registered WRF users exceeds 6000, and WRF is in operationaland research use around the world.
The principal components of the WRF system are depicted in Figure 1.1. The WRF SoftwareFramework (WSF) provides the infrastructure that accommodates the dynamics solvers, physicspackages that interface with the solvers, programs for initialization, WRF-Var, and WRF-Chem.There are two dynamics solvers in the WSF: the Advanced Research WRF (ARW) solver (orig-inally referred to as the Eulerian mass or em solver) developed primarily at NCAR, and the
1
-
8/3/2019 Arw v3 Technical Note
14/125
Analyses /
Forecasts
Observations
Post Processors
Verification
WRF Software Infrastructure
Dynamics Solvers
ARW
NMM
Physics Interface
Physics Packages
WRF-Var Data
Assimilation
WRF-
Chem
Digital
Filter
WRF
PreprocessingSystem
Figure 1.1: WRF system components.
NMM (Nonhydrostatic Mesoscale Model) solver developed at NCEP. Community support forthe former is provided by the MMM Division of NCAR and that for the latter is provided bythe Developmental Testbed Center (DTC).
1.1 Advanced Research WRFThe ARW is the ARW dynamics solver together with other components of the WRF system com-patible with that solver and used in producing a simulation. Thus, it is a subset of the WRFmodeling system that, in addition to the ARW solver, encompasses physics schemes, numer-ics/dynamics options, initialization routines, and a data assimilation package (WRF-Var). TheARW solver shares the WSF with the NMM solver and all other WRF components within theframework. Physics packages are largely shared by both the ARW and NMM solvers, althoughspecific compatibility varies with the schemes considered. The association of a component ofthe WRF system with the ARW subset does not preclude it from being a component of WRFconfigurations involving the NMM solver. The following section highlights the major features of
the ARW, Version 3, and reflects elements of WRF Version 3, which was first released in April2008.
This technical note focuses on the scientific and algorithmic approaches in the ARW, includ-ing the solver, physics options, initialization capabilities, boundary conditions, and grid-nestingtechniques. The WSF provides the software infrastructure. WRF-Var, a component of thebroader WRF system, was adapted from MM5 3DVAR (Barker et al., 2004) and is encompassedwithin the ARW. While WRF-Chem is part of the ARW, Version 3, it is described outside ofthis technical note. Those seeking details on WRF-Chem may consult Grell et al. (2005) and
2
-
8/3/2019 Arw v3 Technical Note
15/125
http://ruc.fsl.noaa.gov/wrf/WG11/status.htm . For those seeking information on running theARW system, the ARW Users Guide (Wang et al., 2008) has the details on its operation.
1.2 Major Features of the ARW System, Version 3
ARW Solver
Equations: Fully compressible, Euler nonhydrostatic with a run-time hydrostatic optionavailable. Conservative for scalar variables.
Prognostic Variables: Velocity components u and v in Cartesian coordinate, vertical velocityw, perturbation potential temperature, perturbation geopotential, and perturbation sur-face pressure of dry air. Optionally, turbulent kinetic energy and any number of scalarssuch as water vapor mixing ratio, rain/snow mixing ratio, cloud water/ice mixing ratio,and chemical species and tracers.
Vertical Coordinate: Terrain-following, dry hydrostatic-pressure, with vertical grid stretchingpermitted. Top of the model is a constant pressure surface.
Horizontal Grid: Arakawa C-grid staggering. Time Integration: Time-split integration using a 2nd- or 3rd-order Runge-Kutta scheme with
smaller time step for acoustic and gravity-wave modes. Variable time step capability. Spatial Discretization: 2nd- to 6th-order advection options in horizontal and vertical. Turbulent Mixing and Model Filters: Sub-grid scale turbulence formulation in both coordi-
nate and physical space. Divergence damping, external-mode filtering, vertically implicitacoustic step off-centering. Explicit filter option.
Initial Conditions: Three dimensional for real-data, and one-, two- and three-dimensional foridealized data. Digital filtering initialization (DFI) capability available (real-data cases).
Lateral Boundary Conditions: Periodic, open, symmetric, and specified options available. Top Boundary Conditions: Gravity wave absorbing (diffusion, Rayleigh damping, or implicit
Rayleigh damping for vertical velocity). Constant pressure level at top boundary along amaterial surface. Rigid lid option.
Bottom Boundary Conditions: Physical or free-slip. Earths Rotation: Full Coriolis terms included. Mapping to Sphere: Four map projections are supported for real-data simulation: polar stere-
ographic, Lambert conformal, Mercator, and latitude-longitude (allowing rotated pole).Curvature terms included.
Nesting: One-way interactive, two-way interactive, and moving nests. Multiple levels andinteger ratios.
Nudging: Grid (analysis) and observation nudging capabilities available. Global Grid: Global simulation capability using polar Fourier filter and periodic east-west
conditions.
3
-
8/3/2019 Arw v3 Technical Note
16/125
Model Physics
Microphysics: Schemes ranging from simplified physics suitable for idealized studies to so-phisticated mixed-phase physics suitable for process studies and NWP.
Cumulus parameterizations: Adjustment and mass-flux schemes for mesoscale modeling.
Surface physics: Multi-layer land surface models ranging from a simple thermal model to fullvegetation and soil moisture models, including snow cover and sea ice. Planetary boundary layer physics: Turbulent kinetic energy prediction or non-local Kschemes. Atmospheric radiation physics: Longwave and shortwave schemes with multiple spectral
bands and a simple shortwave scheme suitable for climate and weather applications. Cloudeffects and surface fluxes are included.
WRF-Var System
WRF-Var merged into WRF software framework.
Incremental formulation of the model-space cost function. Quasi-Newton or conjugate gradient minimization algorithms. Analysis increments on unstaggered Arakawa-A grid. Representation of the horizontal component of background error B via recursive filters (re-
gional) or power spectra (global). The vertical component is applied through projectiononto climatologically-averaged eigenvectors of vertical error. Horizontal/vertical errors arenon-separable (horizontal scales vary with vertical eigenvector).
Background cost function (Jb) preconditioning via a control variable transform U defined asB = UUT.
Flexible choice of background error model and control variables. Climatological background error covariances estimated via either the NMC-method of aver-
aged forecast differences or suitably averaged ensemble perturbations. Unified 3D-Var (4D-Var under development), global and regional, multi-model capability.
WRF-Chem
Online (or inline) model, in which the model is consistent with all conservative transportdone by the meteorology model.
Dry deposition, coupled with the soil/vegetation scheme. Aqueous phase chemistry coupled to some of the microphysics and aerosol schemes. Three choices for biogenic emissions: No biogenic emissions; Online calculation of biogenic
emissions; Online modification of user specified biogenic emissions (e.g., EPA BiogenicEmissions Inventory System (BEIS)).
Two choices for anthropogenic emissions: No anthropogenic emissions and user-specifiedanthropogenic emissions.
Two choices for gas-phase chemical reaction calculations: RADM2 chemical mechanism andCBM-Z mechanism.
Several choices for gas-phase chemical reaction calculations through the use of the KineticPre-Processor (KPP).
4
-
8/3/2019 Arw v3 Technical Note
17/125
Three choices for photolysis schemes: Madronich scheme coupled with hydrometeors, aerosols,and convective parameterizations; Fast-J Photolysis scheme coupled with hydrometeors,aerosols, and convective parameterizations; FTUV scheme scheme coupled with hydrom-eteors, aerosols, and convective parameterizations.
Choices for aerosol schemes: The Modal Aerosol Dynamics Model for Europe (MADE/SORGAM
Model for Simulating Aerosol Interactions and Chemistry (MOSAIC); and The GOCARTaerosol model (experimental). A tracer transport option in which the chemical mechanism, deposition, etc., has been turned
off.
WRF Software Framework
Highly modular, single-source code for maintainability. Two-level domain decomposition for parallel and shared-memory generality. Portable across a range of available computing platforms.
Support for multiple dynamics solvers and physics modules. Separation of scientific codes from parallelization and other architecture-specific issues. Input/Output Application Program Interface (API) enabling various external packages to be
installed with WRF, thus allowing WRF to easily support various data formats. Efficient execution on a range of computing platforms (distributed and shared memory, vector
and scalar types). Support for accelerators (e.g., GPUs). Use of Earth System Modeling Framework (ESMF) and interoperable as an ESMF compo-
nent. Model coupling API enabling WRF to be coupled with other models such as ocean, and land
models using ESMF, MCT, or MCEL.
5
-
8/3/2019 Arw v3 Technical Note
18/125
6
-
8/3/2019 Arw v3 Technical Note
19/125
Chapter 2Governing Equations
The ARW dynamics solver integrates the compressible, nonhydrostatic Euler equations. Theequations are cast in flux form using variables that have conservation properties, following thephilosophy of Ooyama (1990). The equations are formulated using a terrain-following massvertical coordinate (Laprise, 1992). In this chapter we define the vertical coordinate and present
the flux form equations in Cartesian space, we extend the equations to include the effects ofmoisture in the atmosphere, and we further augment the equations to include projections to thesphere.
2.1 Vertical Coordinate and Variables
1.0
0.8
0.6
0.4
0.2
0P
ht= constant
Phs
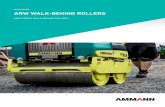
Figure 2.1: ARW coordinate.
The ARW equations are formulated using aterrain-following hydrostatic-pressure vertical co-ordinate denoted by and defined as
= (phpht)/ where = phspht. (2.1)ph is the hydrostatic component of the pressure,and phs and pht refer to values along the surfaceand top boundaries, respectively. The coordinatedefinition (2.1), proposed by Laprise (1992), isthe traditional coordinate used in many hydro-static atmospheric models. varies from a valueof 1 at the surface to 0 at the upper boundary ofthe model domain (Fig. 2.1). This vertical coor-dinate is also called a mass vertical coordinate.
Since (x, y) represents the mass per unit areawithin the column in the model domain at (x, y),the appropriate flux form variables are
V = v = (U,V,W), = , = . (2.2)
v = (u,v,w) are the covariant velocities in thetwo horizontal and vertical directions, respec-tively, while = is the contravariant vertical
7
-
8/3/2019 Arw v3 Technical Note
20/125
velocity. is the potential temperature. Also appearing in the governing equations of the ARWare the non-conserved variables = gz (the geopotential), p (pressure), and = 1/ (the inversedensity).
2.2 Flux-Form Euler EquationsUsing the variables defined above, the flux-form Euler equations can be written as
tU + ( Vu) x(p) + (px) = FU (2.3)tV + ( Vv) y(p) + (py) = FV (2.4)
tW + ( Vw) g(p ) = FW (2.5)t +( V) = F (2.6)
t + ( V) = 0 (2.7)t
+
1
[(V
) gW] = 0 (2.8)along with the diagnostic relation for the inverse density
= , (2.9)
and the equation of statep = p0(Rd/p0)
. (2.10)
In (2.3) (2.10), the subscripts x, y and denote differentiation,
Va = x(Ua) + y(V a) + (a),
andV a = Uxa + Vya + a,
where a represents a generic variable. = cp/cv = 1.4 is the ratio of the heat capacities for dryair, Rd is the gas constant for dry air, and p0 is a reference pressure (typically 10
5 Pascals). Theright-hand-side (RHS) terms FU, FV, FW, and F represent forcing terms arising from modelphysics, turbulent mixing, spherical projections, and the earths rotation.
The prognostic equations (2.3) (2.8) are cast in conservative form except for (2.8) whichis the material derivative of the definition of the geopotential. (2.8) could be cast in flux formbut we find no advantage in doing so since is not a conserved quantity. We could also use aprognostic pressure equation in place of (2.8) (see Laprise, 1992), but pressure is not a conserved
variable and we could not use a pressure equation together with the conservation equation for (2.6) because they are linearly dependent. Additionally, prognostic pressure equations have thedisadvantage of possessing a mass divergence term multiplied by a large coefficient (proportionalto the sound speed) which makes spatial and temporal discretization problematic. It should benoted that the relation for the hydrostatic balance (2.9) does not represent a constraint on thesolution, rather it is a diagnostic relation that formally is part of the coordinate definition. In thehydrostatic counterpart to the nonhydrostatic equations, (2.9) replaces the vertical momentumequation (2.5) and it becomes a constraint on the solution.
8
-
8/3/2019 Arw v3 Technical Note
21/125
2.3 Inclusion of Moisture
In formulating the moist Euler equations, we retain the coupling of dry air mass to the prognosticvariables, and we retain the conservation equation for dry air (2.7), as opposed to coupling thevariables to the full (moist) air mass and hence introducing source terms in the mass conservation
equation (2.7). Additionally, we define the coordinate with respect to the dry-air mass. Basedon these principles, the vertical coordinate can be written as
= (pdh pdht)/d (2.11)
where d represents the mass of the dry air in the column and pdh and pdht represent thehydrostatic pressure of the dry atmosphere and the hydrostatic pressure at the top of the dryatmosphere. The coupled variables are defined as
V = dv, = d, = d. (2.12)
With these definitions, the moist Euler equations can be written astU + ( Vu) + dxp + (/d)px = FU (2.13)tV + ( Vv) + dyp + (/d)py = FV (2.14)
tW + ( Vw) g[(/d)p d] = FW (2.15)t +( V) = F (2.16)td + ( V) = 0 (2.17)
t + 1d [(V ) gW] = 0 (2.18)tQm + ( Vqm) = FQm (2.19)
with the diagnostic equation for dry inverse density
= dd (2.20)
and the diagnostic relation for the full pressure (vapor plus dry air)
p = p0(Rdm/p0d) (2.21)
In these equations, d is the inverse density of the dry air (1/d) and is the inverse densitytaking into account the full parcel density = d(1 + qv + qc + qr + qi + ...)
1 where q arethe mixing ratios (mass per mass of dry air) for water vapor, cloud, rain, ice, etc. Additionally,
m = (1 + (Rv/Rd)qv) (1 + 1.61qv), and Qm = dqm; qm = qv, qc, qi,... .
2.4 Map Projections, Coriolis and Curvature Terms
The ARW solver currently supports four projections to the sphere the Lambert conformal,polar stereographic, Mercator, and latitude-longitude projections. These projections are de-scribed in Haltiner and Williams (1980). The transformation is isotropic for three of theseprojections the Lambert conformal, polar stereographic, and Mercator grids. An isotropic
9
-
8/3/2019 Arw v3 Technical Note
22/125
transformation requires (x/y)|earth = constant everywhere on the grid. Only isotropic trans-formations were supported in the previous ARW releases. Starting with the ARWV3 release,we now support anisotropic projections, in this case the latitude-longitude grid, and with it thefull latitude-longitude global model. The ARW implements the projections using map factors,and the generalization to anisotropic transformations introduced in ARW V3 requires that there
be map factors for both the x and y components of the transformation from computational tophysical space in order to accomodate the anisotropy.
In the ARWs computational space, x and y are constants. Orthogonal projections tothe sphere require that the physical distances between grid points in the projection vary withposition on the grid. To transform the governing equations, map scale factors mx and my aredefined as the ratio of the distance in computational space to the corresponding distance on theearths surface:
(mx, my) =(x,y)
distance on the earth. (2.22)
The ARW solver includes the map-scale factors in the governing equations by redefining themomentum variables as
U = du/my, V = dv/mx, W = dw/my, = d/my.
Using these redefined momentum variables, the governing equations, including map factors androtational terms, can be written as
tU + mx[x(Uu) + y(V u)] + (u) + dxp + (/d)px = FU (2.23)
tV + my[x(Uv) + y(V v)] + (my/mx)(v) + dyp + (/d)py = FV (2.24)
tW + (mxmy/my)[x(Uw) + y(V w)] + (w)m1y g[(/d)p d] = FW (2.25)t + mxmy[x(U) + y(V)] + my() = F (2.26)
td + mxmy[Ux + Vy] + my() = 0 (2.27)
t + 1d [mxmy(Ux + Vy) + mymygW] = 0 (2.28)
tQm + mxmyx(Uqm) + y(V qm)] + my(qm) = FQm, (2.29)
and, for completeness, the diagnostic relation for the dry inverse density
= dd, (2.30)
and the diagnostic equation for full pressure (vapor plus dry air)
p = p0(Rdm/p0d). (2.31)
The right-hand-side terms of the momentum equations (2.23) (2.25) contain the Coriolisand curvature terms along with mixing terms and physical forcings. For the isotropic projections(Lambert conformal, polar stereographic, and Mercator), where mx = my = m, the Coriolis and
10
-
8/3/2019 Arw v3 Technical Note
23/125
curvature terms are cast in the following form:
FUcor = +
f + u
m
y v m
x
V eWcos r uW
re(2.32)
FVcor = f + um
y vm
x
U + eWsin r vW
re (2.33)
FWcor = +e(Ucos r V sin r) +
uU + vV
re
, (2.34)
where r is the local rotation angle between the y-axis and the meridians, is the latitude,f = 2e sin , e = 2e cos , e is the angular rotation rate of the earth, and re is the radius ofthe earth. In this formulation we have approximated the radial distance from the center of theearth as the mean earth radius re, and we have not taken into account the change in horizontalgrid distance as a function of the radius. The terms containing m are the horizontal curvatureterms, those containing re relate to vertical (earth-surface) curvature, and those with e and f
are the Coriolis force.The curvature and Coriolis terms for the momentum equations are cast in the following form
for the anisotropic latitude-longitude grid:
FUcor =mxmy
f V +
uV
retan
uW
re eW cos r (2.35)
FVcor =mymx
f U uU
retan vW
re+ eWsin r
(2.36)
FWcor = +e(Ucos r (mx/my)V sin r) + uU + (mx/my)vV
re , (2.37)For idealized cases on a Cartesian grid, the map scale factor mx = my = 1, f is specified,
and e and r1e should be zero to remove the curvature terms.
2.5 Perturbation Form of the Governing Equations
Before constructing the discrete solver, it is advantageous to recast the governing equationsusing perturbation variables to reduce truncation errors in the horizontal pressure gradientcalculations in the discrete solver and machine rounding errors in the vertical pressure gradient
and buoyancy calculations. For this purpose, new variables are defined as perturbations froma hydrostatically-balanced reference state, and we define reference state variables (denoted byoverbars) that are a function of height only and that satisfy the governing equations for anatmosphere at rest. That is, the reference state is in hydrostatic balance and is strictly only afunction of z. In this manner, p = p(z) +p, = (z) + , = (z) + , and d = d(x, y) +
d.Because the coordinate surfaces are generally not horizontal, the reference profiles p, , and are functions of (x,y, ). The hydrostatically balanced portion of the pressure gradients inthe reference sounding can be removed without approximation to the equations using these
11
-
8/3/2019 Arw v3 Technical Note
24/125
perturbation variables. The momentum equations (2.23) (2.25) are written as
tU + mx[x(Uu) + y(V u)] + (u) + (dxp + d
xp)
+(/d)(dx + p
x dx) = FU (2.38)tV + my[x(Uv) + y(V v)] + (my/mx)(v) + (dyp
+ dy p)
+(/d)(dy + py dy) = FV (2.39)tW + (mxmy/my)[x(Uw) + y(V w)] + (w)
m1y g(/d)[p d(qv + qc + qr)] + m1y dg = FW, (2.40)
and the mass conservation equation (2.27) and geopotential equation (2.28) become
t
d + mxmy[xU + yV] + my = 0 (2.41)
t + 1d [mxmy(Ux + Vy) + mymygW] = 0. (2.42)
Remaining unchanged are the conservation equations for the potential temperature and scalars
t+ mxmy[x(U) + y(V)] + my() = F (2.43)
tQm + mxmy[x(Uqm) + y(V qm)] + my(qm) = FQm. (2.44)
In the perturbation system the hydrostatic relation (2.30) becomes
= dd dd. (2.45)
Equations (2.38) (2.44), together with the equation of state (2.21), represent the equationssolved in the ARW. The RHS terms in these equations include the Coriolis terms (2.32) (2.34), mixing terms (described in Chapter 4), and parameterized physics (described in Chapter
8). Also note that the equation of state (2.21) cannot be written in perturbation form becauseof the exponent in the expression. For small perturbation simulations, accuracy for perturbationvariables can be maintained by linearizing (2.21) for the perturbation variables.
12
-
8/3/2019 Arw v3 Technical Note
25/125
Chapter 3Model Discretization
3.1 Temporal Discretization
The ARW solver uses a time-split integration scheme. Generally speaking, slow or low-frequency
(meteorologically significant) modes are integrated using a third-order Runge-Kutta (RK3) timeintegration scheme, while the high-frequency acoustic modes are integrated over smaller timesteps to maintain numerical stability. The horizontally propagating acoustic modes (includingthe external mode present in the mass-coordinate equations using a constant-pressure upperboundary condition) and gravity waves are integrated using a forward-backward time integrationscheme, and vertically propagating acoustic modes and buoyancy oscillations are integrated usinga vertically implicit scheme (using the acoustic time step). The time-split integration for theflux-form equations is described and analyzed in Klemp et al. (2007). The time-splitting issimilar to that first developed by Klemp and Wilhelmson (1978) for leapfrog time integrationand analyzed by Skamarock and Klemp (1992). This time-split approach was extended to theRK3 scheme as described in Wicker and Skamarock (2002). The primary differences between the
earlier implementations described in the references and the ARW implementation are associatedwith our use of the mass vertical coordinate and a flux-form set of equations, as described inKlemp et al. (2007), along with our use of perturbation variables for the acoustic component ofthe time-split integration. The acoustic-mode integration is cast in the form of a correction tothe RK3 integration.
3.1.1 Runge-Kutta Time Integration Scheme
The RK3 scheme, described in Wicker and Skamarock (2002), integrates a set of ordinarydifferential equations using a predictor-corrector formulation. Defining the prognostic variables
in the ARW solver as = (U,V,W,, , , Qm) and the model equations as t = R(), theRK3 integration takes the form of 3 steps to advance a solution (t) to (t + t):
= t +
t
3R(t) (3.1)
= t +
t
2R() (3.2)
t+t = t + tR() (3.3)
13
-
8/3/2019 Arw v3 Technical Note
26/125
where t is the time step for the low-frequency modes (the model time step). In (3.1) (3.3),superscripts denote time levels. This scheme is not a true Runge-Kutta scheme per se because,while it is third-order accurate for linear equations, it is only second-order accurate for nonlinearequations. With respect to the ARW equations, the time derivatives t are the partial timederivatives (the leftmost terms) in equations (2.38) (2.44), and R() are the remaining terms
in (2.38) (2.44).
3.1.2 Acoustic Integration
The high-frequency but meteorologically insignificant acoustic modes would severely limit theRK3 time step t in (3.1) (3.3). To circumvent this time step limitation we use the time-splitapproach described in Wicker and Skamarock (2002). Additionally, to increase the accuracy ofthe splitting, we integrate a perturbation form of the governing equations using smaller acoustictime steps within the RK3 large-time-step sequence. To form the perturbation equations forthe RK3 time-split acoustic integration, we define small time step variables that are deviations
from the most recent RK3 predictor (denoted by the superscript t and representing either t,, or in (3.1) (3.3)):
V = VVt, = t, = t, = t, d = d dt
, d =
d t
d .
The hydrostatic relation (i.e., the vertical coordinate definition) becomes
d =
1
t
d + t
d
d. (3.4)Additionally, we also introduce a version of the equation of state that is linearized about t,
p =c2s
t
d
t
d
t
d
d
t
d
, (3.5)
where c2s = ptt
d is the square of the sound speed. The linearized state equation (3.5) andthe vertical coordinate definition (3.4) are used to cast the vertical pressure gradient in (2.40)in terms of the models prognostic variables. By combining (3.5) and (3.4), the vertical pressure
gradient can be expressed as
p = (C
) +
c2s
t
d
t
, (3.6)
where C = c2s/tt
d2. This linearization about the most recent large time step should be highly
accurate over the time interval of the several small time steps.
These variables along with (3.6) are substituted into the prognostic equations (2.38) (2.44)
14
-
8/3/2019 Arw v3 Technical Note
27/125
and lead to the acoustic time-step equations:
U + t
t
xp + (t
xp) + (/d)[
tx + (x
t)(p )] = RUt (3.7)
V + t
t
yp + (t
y p) + (/d)[
ty + (y
t)(p )] = RVt (3.8)
d + mxmy[xU + yV
]+ + my+ = R
t (3.9)
+ mxmy[x(U
t
) + y(Vt
)]+ + my(+t
) = Rt (3.10)
W m1y g
(/d)t
(C) +
c2s
t
t
d
= RW
t (3.11)
+
1
t
d
[my+
t mygW] = Rt. (3.12)
The RHS terms in (3.7) (3.12) are fixed for the acoustic steps that comprise the time integrationof each RK3 sub-step (i.e., (3.1) (3.3)), and are given by
Rt
U =
mx[x(Uu) + y(V u)]
(u)
(dxp
d
xp)
(/d)(dx px + dx) + FU (3.13)Rt
V =my[x(Uv) + y(V v)] (my/mx)(v) (dyp dy p) (/d)(dy py + dy) + FV (3.14)
Rt
d=mxmy[xU + yV]my (3.15)
Rt
=mxmy[x(U) + y(V)]my() + F (3.16)
Rt
W = (mxmy/my)[x(Uw) + y(V w)] (w)+ m1y g(/d)[p
d(qv + qc + qr)]m1y dg + FW (3.17)Rt
= 1d [mxmy(Ux + Vy) + mymygW], (3.18)
where all variables in (3.13) (3.18) are evaluated at time t (i.e., using t, , or for theappropriate RK3 sub-step in (3.1) (3.3)). Equations (3.7) (3.12) utilize the discrete acoustictime-step operator
a =a+ a
,
where is the acoustic time step, and an acoustic time-step averaging operator
a =1 +
2a+ +
1 2
a, (3.19)
where is a user-specified parameter (see Section 4.3.3).The integration over the acoustic time steps proceeds as follows. Beginning with the small
time-step variables at time , (3.7) and (3.8) are stepped forward to obtain U+ and V+.Both + and + are then calculated from (3.9). This is accomplished by first integrating(3.9) vertically from the surface to the material surface at the top of the domain, which removesthe
term such that
d = mxmy
01
[xU + yV
]+d. (3.20)
15
-
8/3/2019 Arw v3 Technical Note
28/125
After computing d+ from (3.20), + is recovered by using (3.9) to integrate the
term vertically using the lower boundary condition = 0 at the surface. Equation (3.10)is then stepped forward to calculate +. Equations (3.11) and (3.12) are combined toform a vertically implicit equation that is solved for W+ subject to the boundary condition = = 0 at the surface (z = h(x, y)) and p = 0 along the model top. + is then obtained
from (3.12), and p+
and
d+
are recovered from (3.5) and (3.4).
Begin Time Step
Begin RK3 Loop: Steps 1, 2, and 3
(1) If RK3 step 1, compute and store F(i.e., physics tendencies for RK3 step, including mixing).
(2) Compute Rt
, (3.13)(3.18)
Begin Acoustic Step Loop: Steps 1 n,RK3 step 1, n = 1, = t/3;RK3 step 2, n = ns/2, = t/ns;RK3 step 3, n = ns, = t/ns.
(3) Advance horizontal momentum, (3.7) and (3.8)Global: Apply polar filter to U+ and V+.
(4) Advance d (3.9) and compute + then advance (3.10)
Global: Apply polar filter to +d and +.
(5) Advance W and (3.11) and (3.12)Global: Apply polar filter to W+ and +.
(6) Diagnose p and using (3.5) and (3.4)
End Acoustic Step Loop
(7) Scalar transport: Advance scalars (2.44)over RK3 substep (3.1), (3.2) or (3.3)(using mass fluxes U, V and time-averaged over the acoustic steps).Global: Apply polar filter to scalars.
(8) Compute p and using updated prognostic variables in (2.31) and (2.45)
End RK3 Loop
(9) Compute non-RK3 physics (currently microphysics), advance variables.
Global: Apply polar filter to updated variables.End Time Step
Figure 3.1: Time step integration sequence. Here n represents the number of acoustic timesteps for a given substep of the RK3 integration, and ns is the ratio of the RK3 time step tothe acoustic time step for the second and third RK3 substeps.
16
-
8/3/2019 Arw v3 Technical Note
29/125
3.1.3 Full Time-Split Integration Sequence
The time-split RK3 integration technique is summarized in Figure 3.1. It consists of two primaryloops an outer loop for the large-time-step Runge-Kutta integration, and an inner loop forthe acoustic mode integration.
In the RK3 scheme, physics can be integrated within the RK3 time integration (using a timeforward step, i.e., step (1) in Fig. 3.1, or the RK3 time integration if higher temporal accuracyis desired, i.e., in step (2) implying a physics evaluation every RK3 substep) or external to itusing additive timesplitting, i.e., step (9).
Within the acoustic integration, the acoustic time step is specified by the user throughthe choice of ns (see Section 3.3.2). Within the first RK3 substep, however, a single acoustictime step is used to advance the solution regardless of ns. Within the full RK3-acoustic timesplitintegration, this modified acoustic time step does not impose any additional stability constraints(see Wicker and Skamarock, 2002).
The major costs in the model arise from the evaluation of the right hand side terms Rt
in
(3.7) (3.12). The efficiency of the RK3 timesplit scheme arises from the fact that the RK3time step t is much larger than the acoustic time step , hence the most costly evaluationsare only performed in the less-frequent RK3 steps.
3.1.4 Diabatic Forcing
Within the RK3 integration sequence outlined in Fig. 3.1, the RHS term Rt
in the thermo-
dynamic equation (3.10) contains contributions from the diabatic physics tendencies that arecomputed in step (1) at the beginning of the first RK3 step. This diabatic forcing is integrated
within the acoustic steps (specifically, in step 4 in the time integration sequence shown in Fig.3.1). Additional diabatic contributions are integrated in an additive-time-split manner in step(9) after the RK3 update is complete. Thus, the diabatic forcing computed in step (9) (themicrophysics in the current release of the ARW) does not appear in Rt
from (3.10) in the
acoustic integration. We have discovered that this time splitting can excite acoustic waves andcan give rise to noise in the solutions for some applications. Note that the non-RK3 physics areintegrated in step (9) because balances produced in the physics are required at the end of thetime step (e.g., the saturation adjustment in the microphysics). So while moving these non-RK3physics into step (1) would eliminate the noise, the balances produced by these physics wouldbe altered.
We have found that the excitation of the acoustic modes can be circumvented while leaving
the non-RK3 physics in step (9) by using the following procedure that is implemented in theARW. In step (1) of the integration procedure (Fig. 3.1), an estimate of the diabatic forcingof arising from the non-RK3 physics in step (9) is included in the diabatic forcing termRt
in (3.10) (which is advanced in step 4). This estimated diabatic forcing is then removed
from the updated after the RK3 integration is complete and before the evaluation of thenon-RK3 physics in step (9). We use the diabatic forcing from the previous time step as theestimated forcing; hence this procedure results in few additional computations outside of savingthe diabatic forcing between time steps.
17
-
8/3/2019 Arw v3 Technical Note
30/125
3.1.5 Hydrostatic Option
A hydrostatic option is available in the ARW solver. The time-split RK3 integration techniquesummarized in Fig. 3.1 is retained, including the acoustic step loop. Steps (5) and (6) in theacoustic-step loop, where W and are advanced and p and are diagnosed, are replacedby the following three steps. (1) Diagnose the hydrostatic pressure using the definition of thevertical coordinate
ph =d
d =
1 +
qm
d.
(2) Diagnose d using the equation of state (2.31) and the prognosed . (3) Diagnose thegeopotential using the hydrostatic equation
= dd dd.
The vertical velocity w can be diagnosed from the geopotential equation, but it is not needed inthe solution procedure. The acoustic step loop advances gravity waves, including the externalmode, and the Lamb wave when the hydrostatic option is used.
3.2 Spatial Discretization
The spatial discretization in the ARW solver uses a C grid staggering for the variables as shownin Fig. 3.2. That is, normal velocities are staggered one-half grid length from the thermo-dynamic variables. The variable indices, (i,j,k) indicate variable locations with (x,y, ) =(ix, jy, k). We will denote the points where is located as being mass points, and like-wise we will denote locations where u, v, and w are defined as u points, v points, and w points,respectively. Not shown in Fig. 3.2 are the column mass , defined at the (i, j) points (masspoints) on the discrete grid, the geopotential that is defined at the w points, and the moisture
variables qm are defined at the mass points. The diagnostic variables used in the model, thepressure p and inverse density , are computed at mass points. The grid lengths x and yare constants in the model formulation; changes in the physical grid lengths associated with thevarious projections to the sphere are accounted for using the map factors introduced in Section2.4. The vertical grid length is not a fixed constant; it is specified in the initialization. Theuser is free to specify the values of the model levels subject to the constraint that = 1 at thesurface, = 0 at the model top, and decreases monotonically between the surface and modeltop. Using these grid and variable definitions, we can define the spatial discretization for theARW solver.
3.2.1 Acoustic Step EquationsWe begin by defining the column-mass-coupled variables relative to the uncoupled variables.The vertical velocity is staggered only in k, so it can be coupled directly to the column masswith no averaging or interpolation. The horizontal velocities are horizontally staggered relativeto the column mass such that the continuous variables are represented discretely as
U =du
my d
xu
myx , V =
dv
mx d
yv
mxy ,
18
-
8/3/2019 Arw v3 Technical Note
31/125
x
y
i,j+1 i+1,j+1
i,j i+1,jui-1/2,j ui+1/2,j
ui+1/2,j+1ui-1/2,j+1 ui+3/2,j+1
ui+3/2,j
vi,j-1/2 vi+1,j-1/2
vi+1,j+1/2
vi+1,j+3/2
vi,j+1/2
vi,j+3/2
horizontal grid vertical grid
{y{
x
ui-1/2,k+1 i,k+1 i+1,k+1ui+1/2,k+1 ui+3/2
i,k i+1,kui-1/2,k ui+1/2,k ui+3/2
wi,k-1/2 wi+1,k-1/2
wi+1,k+3/2
wi+1,k+1/2wi,k+1/2
wi,k+3/2
k
{x
k+1/2
{{
Figure 3.2: Horizontal and vertical grids of the ARW
where the discrete operator ax denotes a linear interpolation operator. The grid lengths x andy are constant, hence in this case the operator reduces to ax = (ai+1/2 + ai1/2)/2.
Using these definitions, we can write the spatially discrete acoustic step equations(3.7) (3.12) as
U + t
xt
x
xp + (t
xxp)
x
+(/d)x
[tx
x + (xt
)(px
x)] = Rt
U
(3.21)
V + t
yt
y
yp + (t
yy p)
y
+(/d)y
[ty
y + (yt
)(py y)] = RtV (3.22)
d + mxmy[xU + yV
]+ + my+ = Rt
(3.23)
+ mxmy[x(U
tx
) + y(Vt
y
)]+ + my(+t
) = Rt (3.24)
W m1y g
(/d)t
(C) +
c2s
t
t
d
= RW
t (3.25)
+
1
t
d
[my+
t mygW] = Rt, (3.26)
where the discrete operatorxa = x
1(ai+1/2 ai1/2) (3.27)with the operators y and similarily defined. Additionally, the operator a
is a verticalinterpolation operator. Using the notation given for the vertically stretched grid depicted inFig. 3.2, it is defined as
a|k+1/2 =1
2
k
k+1/2ak+1 +
k+1
k+1/2ak
. (3.28)
19
-
8/3/2019 Arw v3 Technical Note
32/125
This operator vertically interpolates variables on mass levels k to the w levels (k + 12
). It shouldbe noted that the vertical grid is defined such that vertical interpolation from w levels to masslevels reduces to ak = (ak+1/2 + ak1/2)/2 (see Fig. 3.2).
The RHS terms in the discrete acoustic step equations for momentum ( 3.21), (3.22) and(3.25) are discretized as
Rt
U = (dxxxp dxxxp) (/d)x
(dxx
px
x
+ dx
x
)
+ FUcor + advection + mixing + physics, (3.29)
Rt
V = (dyyyp dyyy p) (/d)y
(dyy
py
y
+ dy
y
)
+ FVcor + advection + mixing + physics, (3.30)
Rt
W = m1y g(/d)
[p
+ dqm]m1y dg
+ FWcor + advection + mixing + buoyancy + physics. (3.31)
3.2.2 Coriolis and Curvature Terms
The terms FUcor, FVcor, and FWcor in (3.29) (3.31) represent Coriolis and curvature effects inthe equations using the isotropic map projections (Lambert conformal, polar stereographic, andMercator) where mx = my = m. These terms in continuous form are given in (2.32) (2.34).Their spatial discretization is
FUcor = +fx
+ uxym
vyxm
x
Vxy exW
xcos r
x
uWx
re
, (3.32)
FVcor =
fy
+ uxym vyxmy
Uxy
+ eyWy
sin ry vW
y
re, (3.33)
FWcor = +e(Ux
cos r Vy sin r) +
uxUx
+ vyVy
re
. (3.34)
Here the operators ()xy
= ()xy
, and likewise for ()x
and ()y
.
For the non-isotropic latitude longitude projection, the Coriolis and curvature terms givenin (2.35) and (2.36) are discretized as
FUcor =mxmy
fx
Vxy
+uV
xy
retan
exWx cos rx uW
x
re, (3.35)
FVcor =mymx
fyUxy u
xyUxy
retan + eyW
ysin r
y vWy
re
, (3.36)
FWcor = +e(Ux
cos r (mx/my)Vy sin r) +
uxUx
+ (mx/my)vyV
y
re
. (3.37)
20
-
8/3/2019 Arw v3 Technical Note
33/125
3.2.3 Advection
The advection terms in the ARW solver are in the form of a flux divergence and are a subset ofthe RHS terms in equations (3.13) (3.18):
Rt
Uadv=
mx
[x
(Uu) + y
(V u)] +
(u) (3.38)
Rt
Vadv=my[x(Uv) + y(V v)] + (mx/my)(v) (3.39)
Rt
adv=mxmy[xU + yV] + my (3.40)
Rt
adv=mxmy[x(U) + y(V)]my() (3.41)
Rt
Wadv= (mxmy/my)[x(Uw) + y(V w)] + (w) (3.42)
Rt
adv= 1d [mxmy(Ux + Vy) + my]. (3.43)
For the mass conservation equation, the flux divergence is discretized using a 2nd-order centeredapproximation:
R
t
adv = mxmy[xU + yV]t
+ myt
. (3.44)In the current version of the ARW, the advection of vector quantities (momentum) and scalars
is performed using the RK3 time integration as outlined in Fig. 3.1. The spatial discretizationused in this approach is outlined in the next section. For many applications it is desirable touse positive definite or monotonic advection schemes for scalar transport.
RK3 Advection
2nd through 6th order accurate spatial discretizations of the flux divergence are available in theARW for momentum, scalars and geopotential using the RK3 time-integration scheme (scalar
advection option 1, step 7 in the time-split integration sequence in Fig. 3.1). The discreteoperators can be illustrated by considering the flux divergence equation for a scalar q in itsdiscrete form:
Rt
qadv= mxmy[x(Uqxadv) + y(V qyadv)]my(qadv). (3.45)
As in the pressure gradient discretization, the discrete operator is defined as
x(Uqxadv) = x1
(Uqxadv)i+1/2 (Uqxadv)i1/2
. (3.46)
The different order advection schemes correspond to different definitions for the operator qxadv .The even order operators (2nd, 4th, and 6th) are
2nd order: (qxadv)i1/2 =1
2(qi + qi1)
4th order: (qxadv)i1/2 =7
12(qi + qi1) 1
12(qi+1 + qi2)
6th order: (qxadv)i1/2 =37
60(qi + qi1) 2
15(qi+1 + qi2) +
1
60(qi+2 + qi3),
21
-
8/3/2019 Arw v3 Technical Note
34/125
and the odd order operators (3rd and 5th) are
3rd order: (qxadv)i1/2 = (qxadv)4
th
i1/2
+ sign(U)1
12(qi+1 qi2) 3(qi qi1)
5th order: (qxadv)i1/2 = (qxadv)6thi1/2
sign(U) 160
(qi+2 qi3) 5(qi+1 qi2) + 10(qi qi1)
.
The even-order advection operators are spatially centered and thus contain no implicit dif-fusion outside of the diffusion inherent in the RK3 time integration. The odd-order schemes areupwind-biased, and the spatial discretization is inherently diffusive. The behavior of the up-wind schemes is easily understood by expanding (3.46) using the 5th order operator, assuminga constant mass flux U and multiplying by the timestep t:
tx(Uqxadv
) =t(Uq)|6th
Utx 160 (qi3 + 6qi2 15qi1 + 20qi 15qi+1 + 6qi+2 qi+3)=t(Uq)|6th Cr
60x6
6q
x6+ higher order terms
Similarly, we can expand (3.46) using the 3rd order operator:
tx(Uqxadv) =t(Uq)|4th +
Cr
12x4
4q
x4+ higher order terms
As is evident in their formulation, the odd-order schemes are comprised of the next higher (even)order centered scheme plus an upwind term that, for a constant transport mass flux, is a diffusion
term of that next higher (even) order with a hyper-viscosity proportional to the Courant number(Cr). The diffusion term is the leading order error term in the flux divergence discretization.Further details concerning RK3 advection can be found in Wicker and Skamarock (2002)
Positive-Definite Limiter for RK3 Advection
Mixing ratios of moisture, chemical species or other tracer species should remain positive-definite, that is, negative masses should not be permitted. The Runge-Kutta transport in-tegration defined by the timestepping algorithm (3.1) (3.3), combined with the flux divergenceoperator (3.45), is conservative but it does not guarantee positive definiteness; any negativevalues will be offset by positive mass such that mass is conserved. In many physics options,negative mixing ratios will be set to zero, and this will result in an increase in mass of thatspecies. A positive-definite flux renormalization, applied on the final Runge-Kutta transportstep (3.1), can be used to remove this unphysical effect from the RK3 scalar transport scheme.This scheme is described in Skamarock and Weisman (2008) and Skamarock (2005), and webriefly outline the ARW implementation here.
The final RK3 time integration step for transport of a scalar can be expressed as
()t+t = ()t tmxmy[x(Uqxadv) + y(V qyadv)] + my(qadv) + tSt (3.47)22
-
8/3/2019 Arw v3 Technical Note
35/125
where the flux divergence is evaluated using the (**) time level predicted in RK3 step (3.2).The positive-definite flux renormalization replaces (3.2) with the following two steps. First, thescalar mixing ratio is updated using the tendency derived from the model physics and source/sinkterms.
() = ()t +tSt (3.48)
where we denote this new predictor as (). Second, the full update is computed using a fluxdivergence composed of a first-order upwind flux plus a higher order correction:
()t+t = ()t mxmy(x (Uqxadv)1 + R(Uqxadv)+y
(V qyadv)1 + R(V qyadv)
)
+my
(qadv)1 + R(qadv)
. (3.49)
In (3.49), ()1 denotes a first-order upwind flux and R() denotes a renormalized higher-ordercorrection flux. The higher-order correction flux is the difference between the full RK3 flux andthe first-order upwind flux, that is,
(Uqxadv) = (Uqxadv)1 + (Uqxadv), (3.50)
with similar definitions for (V qyadv) and (qadv). The correction flux is then renormalized asfollows. First, the upwind fluxes are used to perform a partial update of the scalar mass.
() = () tmxmy[x(Uqxadv)1 + y(V qyadv)1] + my(qadv)1This update is positive definite (and monotonic) by design because it is the first-order upwindscheme. Next, a prediction of the minimum possible values of the new-time-level species massis computed at each point by using only the outward directed fluxes (fluxes that remove massfrom the control volume),
()t+tmin = ()tmxmy[x(U+qxadv) + y(V+qyadv)] + my(+qadv) (3.51)where U+, V+ and + indicated the use of fluxes out of a control volume only, that is, onlythose that contribute to lowering the scalar mass. As is obvious from (3.51), the scalar mass()t+tmin < 0 if
() < t
mxmy[x(U+qxadv) + y(V+q
yadv)] + my(+qadv)
For each volume where negative mass is indicated by (3.51), the fluxes are renormalized suchthat the outgoing fluxes and mass in the volume are equivalent.
R (U+qxadv) = (U+q
xadv)
t
mxmy[x(U+qxadv
)
+ y(V+qyadv
)
] + my(+qadv
) (3.52)
with a similar renormalization applied to the (V qyadv) and (qadv). If no negative mass isindicated in (3.51), the correction flux is equal to the
R (U+qxadv) = (U+q
xadv) , R (V+qyadv) = (V+q
yadv) , R (+qadv) = (+q
adv) . (3.53)
The renormalized fluxes (3.52) and (3.53), along with the first order fluxes, are then used in theupdate equation (3.49). Note that if no renormalization is needed, the scheme (3.49) reverts tothe standard RK3 update because the definition of the correction (3.50).
23
-
8/3/2019 Arw v3 Technical Note
36/125
re
re
re
UV
,W
Figure 3.3: Latitude-longitude grid structure in the pole region. In the ARW formulation,re = y/my.
3.2.4 Pole Conditions for the Global Latitude-Longitude Grid
The latitude-longitude grid has a singularity at the two poles where the latitude = 90,as illustrated in Figure 3.3. By design, no variable is defined at the pole point. The area ofthe control volume face at the pole is zero, thus a flux at the pole point is not needed in thesolution of any of the prognostic variables. For example, in the finite volume discretization of themass conservation equation (3.23) for in a control volume closest to the pole, the meridionalgradient (y gradient) of the mass flux yV will use zero for the pole contribution to this term.
The stencils for advection operators higher than 2nd order, described in Section 3.2.3, crossthe poles for flux calculations at the control volume faces located re and 2re from thepole point (Figure 3.3, the V flux is indicated in red). In the current implementation of theARW, we reduce the order of the flux operator at these faces so that their stencils do not extendacross the pole point. While this formally reduces the accuracy of the scheme, we have not beenable to identify any significant degradation in the ARW solutions.
Coriolis and curvature terms are computed for the vertical momentum equation (3.37) andthe horizontal momentum equation for U (3.35). For the W and U points that lie re/2 fromthe pole, the stencils for these terms require a value of V at the pole point. We set the value ofV at the pole equal to the value of V at to evaluate these operators. This approximation isalso used for the meridional advection of V, combined with a lowering of the flux-operator orderto avoid differencing across the pole (as with the flux divergence terms for the other prognosticvariables).
3.3 Stability Constraints
There are two time steps that a user must specify when running the ARW: the model time step(the time step used by the RK3 scheme, see Section 3.1.1) and the acoustic time step (used
24
-
8/3/2019 Arw v3 Technical Note
37/125
in the acoustic sub-steps of the time-split integration procedure, see Section 3.1.2). Both arelimited by Courant numbers. In the following sections we describe how to choose time steps forapplications.
3.3.1 RK3 Time Step Constraint
The RK3 time step is limited by the advective Courant number ut/x and the users choiceof advection schemes users can choose 2nd through 6th order discretizations for the advectionterms. The time-step limitations for 1D advection in the RK3 scheme using these advectionschemes is given in Wicker and Skamarock (2002), and is reproduced here.
Spatial orderTime Scheme
3rd 4th 5th 6thLeapfrog Unstable 0.72 Unstable 0.62
RK2 0.88 Unstable 0.30 UnstableRK3 1.61 1.26 1.42 1.08
Table 3.1: Maximum stable Courant numbers for one-dimensional linear advection. From Wickerand Skamarock (2002).
As is indicated in the table, the maximum stable Courant numbers for advection in the RK3scheme are almost a factor of two greater than those for the leapfrog time-integration scheme.For advection in three spatial dimensions, the maximum stable Courant number is 1/
3 times
the Courant numbers given in Table 3.1. For stability, the time step used in the ARW shouldproduce a maximum Courant number less than that given by theory. Thus, for 3D applications,the time step should satisfy the following equation:
tmax < Crtheory3
xumax, (3.54)
where Crtheory is the Courant number taken from the RK3 entry in Table 3.1 and umax is themaximum velocity expected in the simulation. For example in real-data applications, where jetstream winds may reach as high as 100 ms1, the maximum time step would be approximately80 s on a x = 10 km grid using 5th order advection. For convection-permitting resolutions(typically x 5 km), the vertical velocities in convective updrafts produce the stability-limiting Courant numbers. Given additional constraint from the time splitting, and to providea safety buffer, we usually choose a time step that is approximately 25% less than that givenby (3.54). This time step is typically a factor of two greater than that used in leapfrog-basedmodels. For those users familiar with the MM5 model, the rule of thumb for choosing a time stepis that the time step, in seconds, should be approximately 3 times the horizontal grid distance,in kilometers. For the ARW, the time step (in seconds) should be approximately 6 times thegrid distance (in kilometers).
3.3.2 Acoustic Time Step Constraint
The forward-backward time integration scheme used in the ARWs 2D explicit acoustic stepintegration allows a maximum Courant number Crmax = cs/x < 1/
2, where cs is the
25
-
8/3/2019 Arw v3 Technical Note
38/125
speed of sound. We typically use a more conservative estimate for this by replacing the limitingvalue 1/
2 with 1/2. Thus, the acoustic time step used in the model is
< 2 x
cs. (3.55)
For example, on a x = 10 km grid, using a sound speed cs = 300 ms1, the acoustic timestep given in (3.55) is approximately 17 s. In the ARW, the ratio of the RK3 time step to theacoustic time step must be an even integer. For our example using a x = 10 km grid in areal-data simulation, we would specify the RK3 time step t = 60s (i.e., 25% less than the 80 sstep given by (3.54), and an acoustic time step = 15 s (i.e., 1/4 of the RK3 step, roundingdown the = 17 s step given by (3.55)). Note that it is the ratio of the RK3 time step to theacoustic time step that is the required input in the ARW.
3.3.3 Adaptive Time Step
The ARW model is typically integrated with a fixed timestep, that is chosen to produce astable integration. During any time in the integration, the maximum stable timestep is likelyto be larger than the fixed timestep. In ARWV3, an adaptive timestepping capability has beenintroduced that chooses the RK3 timestep based on the temporally-evolving wind fields. Theadaptively-chosen timestep is usually larger than the typical fixed timestep, hence the dynamicsintegrates faster and physics are called less often, and the time-to-completion of the simulationcan be substantially reduced.
In the adaptive timestep scheme, a target maximum Courant number Crtarget is chosen,where typically 1.1 Crtarget 1.2. The maximum Courant number in the domain at a giventime (Crdomain), computed for all the velocity components (u,v,w), is then used to computea new timestep. When the maximum Courant number in the domain is less than the target
maximum Courant number (Crdomain < Crtarget), then the timestep can be increased and thenew timestep is computed using
tcurrent = min
1 + fi,Crtarget
Crdomain
tprevious, (3.56)
where a typical value for the regulated increase is fi 5%. When the computed maxi-mum domain-wide Courant number exceeds the targeted maximum allowable Courant number(Crdomain > C rtarget), then the time step is decreased to insure model stability:
tcurrent = max1 fd,Crtarget 0.5(Crdomain Crtarget)
Crdomain tprevious, (3.57)
where typically the factor to decrease the time step fd = 25%. Both a lower bound and an upperbound on the time step are enforced based on the initial settings of the time step suggested insection 3.3.1:
tinit = 6 x, (3.58)
tmin = 0.5 tinit, (3.59)
26
-
8/3/2019 Arw v3 Technical Note
39/125
tmax = 3.0 tinit, (3.60)
t = min(max(t,tmin),tmax), (3.61)
to guard the time step from becoming too small or too large. The computation of the number
of acoustic time steps na, described in section 3.3.2, is handled during the first of each of theRK3 model integration steps:
na = max
2 300 tx
+ 1, 4
. (3.62)
For a simulation using nests, the fine-grid domain must maintain an integer number oftime steps within a single model integration step from the parent. At each of the starting modelintegration steps for the child grid, those integration steps when the time on the fine-grid domainequals the time on the parents domain, the adaptive time step algorithm is conducted for thefine grid. Note that the ratio of the nominal grid distance between the parent and the child
does not necesarily imply that same ratio between the model integration time steps.
3.3.4 Map Projection Considerations
For ARW configurations using the Lambert conformal, polar stereographic, or Mercator projec-tions, the timestep constraints is determined by the smallest physical horizontal grid spacing,i.e. min(x/mx,y/my). For global applications, the grid distance used to determine thetimestep should be x/mx evaluated at the computational latitude at which the polar filtersare activated. Polar filtering is discussed in section 4.1.
27
-
8/3/2019 Arw v3 Technical Note
40/125
28
-
8/3/2019 Arw v3 Technical Note
41/125
Chapter 4Turbulent Mixing and Model Filters
A number of formulations for turbulent mixing and filtering are available in the ARW solver.Some of these filters are used for numerical reasons. For example, divergence damping is usedto filter acoustic modes from the solution and polar filtering is used to reduce the timesteprestriction arising from the converging gridlines of the latitude-longitude grid. Other filters are
meant to represent sub-grid turbulence processes that cannot be resolved on the chosen grid.These filters remove energy from the solution and are formulated in part on turbulence theoryand observations, or represent energy sink terms in some approximation to the Euler equation.In this section, we begin by outlining the formulation and discretization of turbulent mixingprocesses in the ARW solver commonly associated with sub-gridscale turbulence as parame-terized in cloud-scale models the second-order horizontal and vertical mixing. In large-scalemodels and most NWP models, vertical mixing is parameterized within the planetary boundarylayer (PBL) physics. Vertical mixing parameterized within the PBL physics is described later inChapter 8. Here we note that, when a PBL parameterization is used, all other vertical mixingis disabled. Following the outline of turbulent mixing parameterizations in this chapter, other
numerical filters available in the ARW solver are described.
4.1 Latitude-Longitude Global Grid and Polar Filtering
Polar filtering is used to reduce the timestep restriction associated with the gridlines that con-verge as they approach the poles of the latitude-longitude grid; the converging gridlines reducethe longitudinal gridlength, and thus the stable timestep for transport, discussed in Section3.3.1, and for acoustic waves, discussed in Section 3.3.2, will be reduced.
Polar filtering a given variable is accomplished by first applying a 1D Fourier transform tothe variable on a constant computational-grid latitude circle (the forward transform), where
the field is periodic. The Fourier coeffi
cients with wavenumbers above a prescribed thresholdare truncated, after which a transformation back to physical space is applied (the backwardtransform), completing the filter step.
A filter application can be written as
(k)filtered = a(k) (k), for all k,
where (k) and (k)filtered are the Fourier coefficients for the generic variable before and afterfiltering, and a(k) are the filter coefficients defined as a function of the dimensionless wavenumber
29
-
8/3/2019 Arw v3 Technical Note
42/125
k. The ARW polar filter coefficients a(k) for the Fourier amplitudes are
a(k) = min
1., max
0.,
cos
cos o
21
sin2(k/n)
where is the latitude on the computational grid, o is the latitude above which the polar filteris applied (the filter is applied for || > o), and n is the number of grid points in the latitudecircle. For even n, the grid admits wavenumber k = 0 and dimensionless wavenumbers k fork = 1 n/2 1, and the 2 wave k = n/2. For odd n, the grid admits wavenumber k = 0,and dimensionless wavenumbers k for k = 1 (n 1)/2.
Polar filter applications within the split-explicit RK3 time integration scheme are given inFigure 3.1. Within the acoustic steps, the filter is applied to U+ and V+ immediatelyafter the horizontal momentum is advanced, to +d and
+ immediately after the columnmass and the potential temperature are advanced, and to W+ and + after the verticallyimplicit part of the acoustic step is complete. The polar filter is also applied to the scalars after
they are advanced every RK3 sub-step (3.1)-(3.3) and after the microphysics step.The prognostic variables are coupled with the column mass when filtered, and in this way
mass is conserved. An exception to this is the geopotential which is filtered without beingcoupled. The Fourier filtering is conservative, but it is not monotonic or positive definite. Asnoted in the ARW stability discussion in Section 3.3.4, timestep stability should be based on thelongitudinal gridlength where the polar filters are activated, (x/mx)|o. The positive definitetransport option, presented in Section 3.2.3, will not necessarily produce positive-definite resultsbecause of the converging gridlines and should not be used.
4.2 Explicit Spatial DiffusionThe ARW solver has three formulations for spatial dissipation diffusion along coordinatesurfaces, diffusion in physical (x,y,z) space, and a sixth-order diffusion applied on horizontalcoordinate surfaces. In the following sections we present the diffusion