Article Woo
7
1 Introduction WHEN CURRENT is injected into or voltage is applied to a subject in electrical impedance tomography (EIT), impe- dance cardiography, impedance pneumography, cardiac defibrillation etc., the current-voltage relationship is determined by Poisson's equation with boundary condi- tions (Vp- IVV =f). We need to solve the equation to know how currents flow in the thorax, how a certain set of " boundary measurements is obtained etc. For a non-homogeneous, anisotropic, and irregularly shaped subject such as the thorax, an analytic solution of the equation is impossible. Therefore numerical techniques are used, such as the finite-element method (FEM) or finite-difference method (FDM). As the FEM is advantag- eous in modelling an arbitrarily shaped object, it has been used by many biomedical engineering researchers in cardiology (KIM, 1982; KIM et aL, 1983; SIDEMAN, 1988), defibrillation (KOTHIYAL et al., 1988; RAMIREZ et al., 1989); SEPULVEDA et aL, 1990; BLILIE et al., 1992), dispersive- electrode study (KIM, 1982), electric-field distribution in the human body (NATARAJAN and SESHADRI, 1976), impedance cardiography (KIM et al., 1988), plethysmography (BHAT- TACHARYAand TANDON, 1988), and EIT (Hug et al., 1991; LIu et al., 1988; MURAl and KAGAWA, 1985; WEBSTER,1990; WEXLER, 1988; WOO et aL, 1993; YORKEY et aL, 1987). Even though the FEM is a powerful tool in studying the current-voltage relationships of the human body, the design First received 22nd October 1992 and in final form 20th May 1993 9 IFMBE: 1994 of the finite-element mesh (discretisation of the physical medium) is very laborious and nontrivial, especiaUy in three dimensions. Therefore there have been only a few three-dimensional finite-element analysis studies in the biomedical engineering area, mainly owing to the diffi- culties in generating three-dimensional finite-element meshes and to the large number of computations. Although several finite-element software packages are commercially available, they are expensive and are not flexible when used for a specific purpose such as EIT, where the FEM is used as a part of the image-reconstruction algorithm. To the best of our knowledge, the first three-dimensional finite-element model of the thorax was by Kim et aL (KIM, 1982; 1983). Their torso model included 19 layers with an average of 232 elements between layers, giving 5340 nodes. They (KIM et al., 1988) developed a three- dimensional finite-element model of the thorax for the study of the origin of the impedance change in impedance cardiology. Their model consisted of 22 eight-node trilinear hexahedral elements in each of 29 layers, resulting in a total of 880 nodes and 658 elements. The most recently published three-dimensional finite-element model of the thorax is (BL1LIE et aL, 1992) for the study of defibrillation electrode systems. They used 56 transverse CT images and averaged 4 voxels of CT density data into one element. Their model consisted of 408 449 uniformly sized linear brick elements with 429 829 nodes. In static EIT imaging, where the absolute values of a cross-sectional resistivity distribution are to be re- constructed, it is necessary to construct a finite-element model of a subject with an irregular boundary. Therefore 530 Medical & Biological Engineering & Computing September 1994
description
ji
Transcript of Article Woo
-
1 Int roduct ion
WHEN CURRENT is injected into or voltage is applied to a subject in electrical impedance tomography (EIT), impe- dance cardiography, impedance pneumography, cardiac defibrillation etc., the current-voltage relationship is determined by Poisson's equation with boundary condi- tions (Vp- IVV =f) . We need to solve the equation to know how currents flow in the thorax, how a certain set of
" boundary measurements is obtained etc. For a non-homogeneous, anisotropic, and irregularly
shaped subject such as the thorax, an analytic solution of the equation is impossible. Therefore numerical techniques are used, such as the finite-element method (FEM) or finite-difference method (FDM). As the FEM is advantag- eous in modelling an arbitrarily shaped object, it has been used by many biomedical engineering researchers in cardiology (KIM, 1982; KIM et aL, 1983; SIDEMAN, 1988), defibrillation (KOTHIYAL et al., 1988; RAMIREZ et al., 1989); SEPULVEDA et aL, 1990; BLILIE et al., 1992), dispersive- electrode study (KIM, 1982), electric-field distribution in the human body (NATARAJAN and SESHADRI, 1976), impedance cardiography (KIM et al., 1988), plethysmography (BHAT- TACHARYA and TANDON, 1988), and EIT (Hug et al., 1991; LIu et al., 1988; MURAl and KAGAWA, 1985; WEBSTER, 1990; WEXLER, 1988; WOO et aL, 1993; YORKEY et aL, 1987).
Even though the FEM is a powerful tool in studying the current-voltage relationships of the human body, the design
First received 22nd October 1992 and in final form 20th May 1993
9 IFMBE: 1994
of the finite-element mesh (discretisation of the physical medium) is very laborious and nontrivial, especiaUy in three dimensions. Therefore there have been only a few three-dimensional finite-element analysis studies in the biomedical engineering area, mainly owing to the diffi- culties in generating three-dimensional finite-element meshes and to the large number of computations. Although several finite-element software packages are commercially available, they are expensive and are not flexible when used for a specific purpose such as EIT, where the FEM is used as a part of the image-reconstruction algorithm.
To the best of our knowledge, the first three-dimensional finite-element model of the thorax was by Kim et aL (KIM, 1982; 1983). Their torso model included 19 layers with an average of 232 elements between layers, giving 5340 nodes. They (KIM et al., 1988) developed a three- dimensional finite-element model of the thorax for the study of the origin of the impedance change in impedance cardiology. Their model consisted of 22 eight-node trilinear hexahedral elements in each of 29 layers, resulting in a total of 880 nodes and 658 elements. The most recently published three-dimensional finite-element model of the thorax is (BL1LIE et aL, 1992) for the study of defibrillation electrode systems. They used 56 transverse CT images and averaged 4 voxels of CT density data into one element. Their model consisted of 408 449 uniformly sized linear brick elements with 429 829 nodes.
In static EIT imaging, where the absolute values of a cross-sectional resistivity distribution are to be re- constructed, it is necessary to construct a finite-element model of a subject with an irregular boundary. Therefore
530 Medical & Biological Engineering & Computing September 1994
-
powerful and easy-to-use tools are required for generating finite-element meshes, as well as very efficient numerical techniques for solving a linear system of equations.
The main purpose of this paper is to describe two- and three-dimensional finite-element analysis software packages with an interactive graphical mesh generator, including automatic and manual mesh generation and editing, mesh optimisation, automatic node renumbering etc., for use in EIT and other biomedical engineering research areas.
2 Fin i te-element method
When high-frequency (10 ~ 50 kHz) current is injected into a subject, there is no internal source of such a high-frequency component. Therefore the governing equa- tion of interest becomes the following well known Laplace equation of voltage V for a non-homogeneous domain with irregular boundary shape:
Vp-IVV = 0 (1)
In the FEM, we approximate the calculus problem (Vp-lVV = 0) by the algebraic problem (Yv = c, a linear system of equations) by discretising the domain into a finite number of small elements, and then we solve the resulting linear system of equations. The solution of the linear system of equations provides the piecewise approximation of the voltage values within the domain.
2.1 Discretisation
First, we divide the domain into a finite number of elements. We usually use triangular or quadrilateral elements in two-dimensional problems, and tetrahedral or hexahedral elements in three-dimensional problems. In EIT, we assume that the resistivity in each element is homogeneous and isotropic. The discretisation process converts the continuous problem into a problem with a finite number of unknowns by expressing the unknown field variables (voltages) in terms of certain interpolation functions within each element. The interpolation functions are defined in terms of the values of the field variables at nodes of the element. Therefore the nodal values of the field variables become new unknowns, and the values of the field variables inside the elements are determined from the nodal values by the interpolation functions. We know that the solution of the FEM converges to the true solution as the element size decreases to zero (BURNETT, 1987; HUEBNER and THORNTON, 1975).
2.2 Selection of interpolation functions
Usually, polynomials are used as interpolation functions as they are easy to differentiate and integrate. They also provide interelement continuity and completeness. The degree of the polynomial depends on the number of nodes in the element, the nature and number of unknowns at each node, and other boundary conditions. Burnett describes various kinds of element and interpolation functions.
We can increase the number of nodes of an element, the order of the interpolation function and/or the number of elements until we achieve the required accuracy. Sepulveda (SEPULVEDA, 1984) discussed the pros and cons of elements with different numbers of nodes and automatic determina- tion of their interpolation functions. As an example, in EIT, sometimes it is better to increase the number of elements rather than to increase the number of nodes of one element, as the larger number of elements gives better spatial resolution of resistivity, with the same total number of nodes.
Medical & Biological Engineering & Computing
2.3 Characterisation of elements
Next, we evaluate the element matrix y, which formulates solutions for individual elements. Huebner and Thornton (HUEBNER and THORNTON, 1975) describe four different methods for evaluating the element matrix. We use the variational approach, where we use the constraint that the solution must have the minimum potential energy within each element with the given boundary conditions. Burner (BURNETT, 1987) describes more general methods, called the methods of weighted residuals.
Element matrices for various kinds of two- and three-dimensional element are derived in the literature (BURNETT, 1987; HUEBNER and THORNTON, 1975; KIM, 1982; SEPULVEDA, 1984; TONG and ROSSETTOS, 1977). Kim described element matrices for hexahedral, tetrahedral and prism elements, and Sepulveda described element matrices for three-dimensional isoparametric elements.
2.4 Global node numbering and assembly of the master matrix Y
All nodes are numbered globally in the mesh. Each node of an element also has a local node number. Global node numbering could be done in an arbitrary way. However, the way we globally number the nodes greatly affects the amount of computation when we use the methods described later.
After we have calculated element matrix y for each element and assigned global node numbers to all nodes in the mesh, we assemble the master matrix Y to obtain the solution over the entire region. The basis of the assembly procedure is that the values of the field variables are the same at the nodes where elements are interconnected.
Now we have a linear system of equations Yc = c where Y is the master matrix (or admittance matrix), v is the node voltage vector, and c is the node current vector. The master matrix Y is N x N, where N is the total number of nodes in the finite-element mesh.
2.5 Application of appropriate constraints
We need to set one reference node and modify the master matrix accordingly to have a rank of N. We also need to impose the following boundary conditions when they are available.
2.5.1 Reference node: we select one node to be the reference node and set the voltage at this node to 0. This is done by setting the corresponding row and column of the master matrix to 0, with 1 at the diagonal, and setting the corresponding element of the current vector to 0.
2.5.2 Dirichlet boundary condition (known surface voltages): when we know some voltage values at the surface, we force the solution of the corresponding node voltages to have those known boundary values. For example, if the ith node is a boundary node with a known voltage value of Vb, then we set the ith row and column of the master matrix Y to be zero, with one at the diagonal (Y, = t) and v~ = Vb.
2.5.3 Cauchy boundary condition (known surface currents): when we know some current values at the surface (usually the injection currents), we set the corresponding elements of the current vector to those known values.
Now we have the following uniquely solvable linear system of equations with all boundary data in it:
Yv = c (2)
September 1994 531
-
global decomposition. Heighway and Biddlecombe (HEIGH- WAY and BIDDLECOMBE, 1982) described the two-dimen- sional automatic mesh generator used in the finite- element electromagnetics package PE2D. Cendes et al. (CENDES et aL, (1983) described the Delaunay triangulation algorithm as an automatic mesh-generated method.
Some automatic mesh generators include a mesh- optimisation method, which is based on the quality factor of an element. The quality factor is determined by the size and shape of an element (LINDHOLM, 1983). For a two-dimensional triangular element, any angle near 180 ~ indicates a low quality factor. For a two-dimensional quadrilateral element, if it is too flat or narrow, its quality factor is low. Elements with low quality factor can produce numerical problems when we solve the resulting linear system of equations, as they may result in indefinite element matrices. The Delaunay triangulation algorithm is widely used in generating meshes with triangular elements as it generates elements with good quality factors.
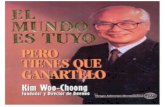
Fig. 1 Two-dimensional finite-element mesh generator developed for EIT on a Macintosh I1; this mesh generator provides many interactive graphical mesh-design tools; it can also use scanned cross-sectional images to design realistic meshes of internal organs
where Y is the modified master matrix, and v and e are the modified voltage and current vectors, respectively, satisfying all constraints.
2.6 Solution of the matrix equation
As the required computation time for the solution of the linear system of equations is large, an efficient numerical technique is essential in certain application areas. Usually, the master matrix is symmetric, positive definite and very sparse. We can choose an efficient numerical technique to solve eqn. 2 based on the characteristics of the master matrix Y, which is determined by the global node numbering method. In this paper, we used the sparse-matrix and vector methods described later.
3 Mesh generation
As described in the preceding Section, the generation of finite-element meshes is the most troublesome part of the use of the FEM. When we design a finite-element mesh for impedance imaging, for example, we can use any a priori information about the structure of a subject. Therefore there is a need for interactive graphical mesh-generation tools for adding, removing and modifying elements and also for easy change of the boundary shape of the mesh.
We have developed two- and three-dimensional finite- element mesh generators on a Macintosh II personal computer to utilise fully the graphical user interface features of the Macintosh computer. The mesh generators provide many interactive graphical tools for the ease of complicated mesh generation.
3.1 Automatic mesh generation and quality factor of element
Given the boundary definition of an object, the automatic mesh generator will generate a mesh in a certain predefined way, and the generated mesh can be modified later using the various mesh-design tools. Sabonnadiere and Coulomb (SABONNADIERE and COULOMB, 1987) described several mesh-generating techniques, including meshing by block, grid superposition, frontal propagation, layer stacking, and
3.2 Two-dimensional mesh generator
As shown in Fig. 1, our mesh generator provides many graphical and interactive tools for creating and modifying two-dimensional finite-element meshes. It also allows us to create a realistic mesh of internal organs by overlapping a scanned cross-sectional image of the human thorax as a background.
We also optimise the mesh to achieve better numerical stability and accuracy. The current mesh generator uses the Delaunay algorithm as an automatic mesh-generation and optimisation method. We can also refine or optimise a manually generated mesh with the same method. Table 1 summarises the developed mesh-generation tools of the two-dimensional finite-element mesh generator.
3.3 Three-dimensional mesh generator
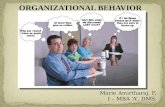
We expanded our two-dimensional finite-element mesh generator into a flexible three-dimensional mesh generator, shown in Fig. 2, by using the layer-stacking method. The three-dimensional mesh is first created by stacking many layers of a two-dimensional mesh. Then, one of the background images in the image database is selected and
Table l Mesh generation tools of the two-dimensional finite- element mesh generator
tool function tool function
new connected edges ~ selection arrow
9 new node A character tool
..~ inseff node r~.] range selection tool 1
.-~ delete node ~ range selection tool 2
"--" new edge 0~ zoom
"~ cut edge .."-. move node
~. triangular element ~ extend element
rectangular element 5 move element
I~ circular boundary A refine element
[ ] rectangular boundary ~ optimise element
voltage-sensing node (~)i current-injection node
J - reference node (~ non-electrode node
boundary element 1 ~ boundary element 2
boundary element 3 ~ new rectangular mesh
532 Medical & Biological Engineering & Computing September 1994
-
attached to each layer. Displaying the mesh for each layer on top of the background image, we can modify the mesh using the mesh-editing tools.
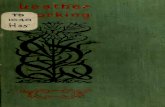
Fig. 3 shows a simple example of a three-dimensional mesh of the human thorax. Each two-dimensional mesh in Fig. 3 was created using cross-sectional images of the thorax (sections 20-27) from work by Carter (CARTER et al., 1977). The entire three-dimensional mesh of the thorax will require more than 30 layers,
Three-dimensional mesh generation is very difficult without proper graphical feedback. We added a few three-dimensional graphics capabilities into the mesh generator. We can view the entire mesh in three dimensions by perspective transformation. We can also view a single element or many elements belonging to a certain organ. By having graphical feedback, we can confirm the correct connections between nodes for the validity check of the element. We can also determine how badly one element is distorted in shape.
3.4 Boundary elements
We implemented three tools shown in Table 1 for generating boundary elements that model electrodes (HUA et al., 1993). The first tool is for point electrodes and generates a simple one-dimensional element (a resistor). The other two tools are for modelling large or compound electrodes. We can use either three-node or four-node boundary elements to model large or compound electrodes.
4 Solut ion of a l inear system of equations
To minimise the computation time to solve the linear system of equations, we use sparse-matrix techniques as the master matrix is very sparse. Our current mesh generator provides several different node-renumbering algorithms that maximise the sparsity of the master matrix, thereby minimising the amount of computation. It has been shown that the sparse-matrix and vector method with node- renumbering algorithms significantly reduces the computa- tion time in reconstructing static images in EIT (Woo, 1990).
4.1 Sparse-matrix method
There are many different sparse-matrix techniques developed so far in areas such as partial differential
Fig. 2 Three-dimensional mesh generator
equations, power system analysis, electric circuit analysis, structural analysis etc. The basic idea of the sparse factorisation and the sparse forward and back substitution routine is that we can avoid any trivial computations using information about the matrix structure and a carefully designed data structure.
4.1.1 Topology analysis and node renumberin,q: the analysis of a matrix structure is the first step in the sparse-matrix method. The analysis step includes ordering (node-renumbering) algorithms and symbolic factorisation. Given a finite-element mesh, we find a permutation vector using ordering algorithms that try to minimise the number of fill-ins during LU factorisation. Then, the locations of all fill-ins in the factorised matrix are found by symbolic factorisation.
As the performance of most ordering algorithms depends on the matrix, we need to compare the performance of different ordering algorithms for a given sparse matrix (DUFF et al., 1986). Woo compared six ordering algorithms: Tinney scheme 1 (SATO and TtNNEV, 1963), Tinney scheme 2 (TINNEY and WALKER, 1967), Tinney scheme 3 (TINNEY and WALKER, 1967), Cuthill-McKee (GEORGE and LIu, 1981), reverse Cuthill-McKee (GEORCE and LIu, 1981) and Gibbs-Poole-Stockmeyer (GxBBS et al.,
Fig. 3 Example of three-dimensional mesh generated using cross-sectional images of the thorax from CARTER et al. (1977): (a) sections 20-27. (b) two-dimensional mesh of section 23
Medical & Biological Engineering & Computing September 1994 533
-
Fig. 4
(a) (b)
(a) Structure of the Y matrix (389 x 389, 2803 nonzero (elements) for the finite-element mesh in Fig. 6; it has 2803 nonzero elements (1.85%); the global node numbers are assigned radially from the inside; (b) structure of the L + U matrix after LUfactorisation of Y: it has 44849 non-zero elements (29.64%); amon 9 them, 42 046 elements (27. 79%) are fill-ins
1976). The first three are general methods for all types of sparse matrix, and the others are used only for brand matrices. Based on the numerical experiments using various meshes, Woo concluded that the Tinney scheme 2, which is also called 'the minimum degree algorithm' or 'Markowitz ordering for symmetric matrix', is the best in most cases.
Fig. 4a is the topology of the master matrix Y derived from the two-dimensional circular mesh in Fig. 6. Fig. 4b is the matrix after LU factorisation. We can see that many fill-ins are generated by LU factorisation. Fig. 5a shows the structure of the Y matrix shown in Fig. 4a after using the Tinney scheme 2 ordering, and Fig. 5b is the structure of the L + U matrix after factorisation. Fig. 5 shows that we could significantly reduce the number of fill-ins by using the ordering algorithm.
The amount of computation time for the normal LU factorisation increases with the cube of the number of nodes (~ O(NS)). However, if we use the sparse-matrix method, the computation time for the factorisation increases by less than the square of the number of nodes (~O(Nl'Ss)). We also found that application of the ordering algorithm could provide a maximum reduction to 1/32 of the computation time, compared with the case when we do not use any ordering algorithm.
4.1.2 Symbolic factorisation: in the sparse-matrix method, we store only non-zeros of the matrix. In order not to create a new storage area for a fill-in during the LU factorisation,
Fig. 5
we find all fill-ins before the actual numerical LU factorisation. This procedure is called symbolic factorisa- tion, and the sparse matrix with all fill-ins added is called the perfect elimination matrix (ALVARADO, 1977).
4.1.3 Repeated solutions: one of the advantages of the direct method in solving a linear system of equations is the ability to perform many repeated solutions with different right-hand-side (RHS) vectors without factorising the matrix again. This is especially important in the EIT image reconstruction using the modified Newton-Raphson method.
4.2 Sparse-vector method
When the RHS vector v in eqn. 2 is also sparse, we can further reduce the computation time by analysing the forward and back substitution path. We implemented the sparse-vector method of Tinney et al. in solving eqn. 2 and found that the method reduces the computation time by about 5-t0%.
4.3 Data structure
Many different data structures have been suggested for different types of sparse matrix (DUFF et al., 1986; GEORGE and Liv, 1981). The most used one in a general sparse-matrix code is the row linked-list. As we set up a linked-list for each row of the matrix, there are a total of N linked-lists, and each of them contains all non-zero entries in the corresponding row of the perfect elimination matrix.
4.4 Sparse factorisation and substitution
Using the information about the matrix structure and the row linked-list data structure, we eliminated a sparse LU factorisation and a forward and back substitution routine. Let z be the total number of non-zeros in a matrix, then, for a sparse matrix,
z = O(N l+~) (3)
where N is the dimension of the matrix, and 7 < 1. Then, the number of arithmetic operations involved in the sparse factorisation and substitution step could be O(N 1 +2~) and O(NI+~), respectively. Therefore we could reduce the computation time significantly.
For a very large mesh, especially in three dimensions, we may not be able to store the master matrix in memory even using sparse-matrix techniques. Then the implementation. of the frontal solver, where the equation is solved element by element (SEPULVEDA, 1984), will be necessary.
(a) (b)
(a) Structure of the Y matrix for the finite-element mesh in Fig. 6 after Tinney scheme 2 ordering," (b) structure of the L + U matrix after factorisation, it has 7869 non=ero elements (5.20%). amony them, 5066 elements (3.35%) are fill-ins
Medical & Biological Engineering & Computing
5 Applications in EIT
The finite-element analysis software package is general, so that we can use it in many different applications. To use it in static EIT image reconstructions, we need the following special considerations and customisations.
For a reconstruction algorithm such as the modified Newton-Raphson method (YORKEY et at., 1987; HUA et al., 1991), the number of elements limits the spatial resolution Of the resistivity image. Therefore, in developing the finite-element model for EIT, we must consider not only the accuracy of the amplitude of the solution of the forward problem but also the spatial resolution it provides. A fine mesh provides both good accuracy and good spatial resolution. However, the design of the mesh is strictly limited by the relationship between the number of electrodes and the number of independent measurements.
534 September 1994
-
5.1 Number of electrodes, number of independent measure- ments and spatial resolution
Let the number of electrodes be E, then the number of independent measurements is E(E - 1)/2 (WEBSTER, 1990). As this is equivalent to the maximum number of equations, the maximum number of resistivity values (unknowns) we can determine is limited by this number. However, in practice, we can only determine a number of resistivity values less than this number, owing to the non-linear nature of the problem. Therefore the spatial resolution of the resistivity image is primarily determined by the number of electrodes used in the EIT system.
5.2 Groupings of elements
When a generated mesh contains many elements to provide a good accuracy for the forward problem, we frequently need to constrain some elements by forcing them to have the same resistivity value. This is called element grouping and it decreases the spatial resolution. If we already know the resistivity values of some elements, we can fix the values during image reconstruction. This feature can be used in the layer-stripping image reconstruction (CHENEY et al., 1992).
5.3 Example of a finite-element mesh
Fig. 6 shows a mesh of a circular two-dimensional physical phantom for a 32-electrode EIT system. This model consists of 389 nodes and 536 triangular or quadrilateral elements. The size of each element was determined so that it could provide 5% spatial resolution of resistivity images. We modelled the region around each electrode with three elements (two under each-electrode and one between pairs of electrodes), resulting in the total of 96 elements in the outermost layer. We used four-node boundary elements to model the compound electrodes (HOA et al., 1993). This permitted us to solve the forward problem accurately as voltage changes are large in this region. Even though many elements are needed in the outside layers for accuracy, high spatial resolution is not usually needed there. Therefore we constrained the elements in the two or three outermost layers by assigning the same resistivity value to two or four elements as the resistance in this region, including the electrode-skin resistance, does not change rapidly from region to region. There are 376 resistivity values to be determined by the reconstruction algorithm. As there are 496 independent measurements from the 32 electrodes, these 376 resistivity values can be determined from the measured voltage data on the surface. Woo (Woo et al., 1993) used this mesh in the reconstruction of static resistivity images.
6 Conclusions
We have developed a finite-element software package on a Macintosh II computer for uses in EIT and other biomedical engineering research areas, such as cardiology and impedance pneumography, where finite-element analy- sis is required. It includes two- and three-dimensional interactive graphical finite-element mesh generators and efficient algorithms for solving linear systems of equations using sparse-matrix and vector techniques.
To improve the software package developed, more of the three-dimensional graphics functions need to be developed. In particular, hidden line removal will greatly improve the appearance of the mesh. For graphical display of finite-element analysis results, a contour plot of equi-
Medical & Biological Engineering & Computing
Fig. 6 Two-dimensional circular finite-element model with 389 nodes, 536 elements and 376 independent elements for a 32-electrode EIT system; 32 pairs of annular current and voltage electrodes cover 90% of the surface. (a) current electrode, (b) voltage electrode
potential lines and display of current streamlines will be useful. Acknowledgments--This work was supported by the National Science Foundation under grant EET-8714618.
References ALVARADO, F. L. (1977): 'Computational complexity of operations
involving perfect elimination sparse matrices', Int. J. Comput. Math., 6, pp. 69-82
BHATTACHARVA, B., and TANDON, S. N. (1988): 'Potential distribution in the thorax in relation to electrical field plethysmography', Med. & Biol. Eng. & Comput., 26, pp. 303-309
BLILIE, D. E., KIM, Y., HAYNOR, D. H., and CHAN, C. (1992): 'Generation of an anatomically correct human thorax finite element model'. Proc. Ann. Int. Conf. IEEE Eng. Med. Biol. Soc., Paris, France, 14, pp. 653-654
BURNETT, D. S. (1987): 'Finite element analysis: from concepts to applications' (Addison-Wesley, Reading, Massachusetts)
CARTER, B. L., MOREHEAD, J., WOLPERT, S. M., HAMMERSCHLAG, S. B., GRIFFITHS, H. J. and KAHN, P. C. (1977). 'Cross-sectional anatomy--computed tomography and ultrasound correlation' Appleton-Century-Crofts, New York
CENDES, Z. J., SHENTON, D. and SHAHNASSER, H. (1983): 'Magnetic field computation using Delaunay triangulation and comple- mentary finite element methods', IEEE Trans., MAG-19, pp. 2551-2554.
CHENEY, M., lSAACSON, D., SOMERSALO, E. J., and ISAACSON, E. L. (1992): 'Layer-stripping reconstruction algorithm for impedance imaging.' Proc. Ann. Int. Conf. IEEE Eng. Med. Biol. Sci., 14, Paris, France, pp. 1694-1695
DUFF, I. S., ERISMAN, A. M. and REID, J. K. (1986): 'Direct methods for sparse matrices' Oxford University Press, New York
GEORGE, A., and L~u, J. W. (I981): 'Computer solution of large sparse positive definite systems' Prentice-Hall, Englewood Cliffs, NJ
GIBBS, N. E., POOLE, W. G. Jr., and STOCr(MEYER, P. K. (1976): 'An algorithm for reducing the bandwidth and profile of a sparse matrix', SIAM ,I. Numer. Anal., 13, pp. 236-250
HEIGHWAY, E. A., and BIDDLECOMBE, C. S. (1982): 'Two dimensional automatic triangular mesh generation for the finite element
September 1994 535
-
electromagnetics package PE2D', IEEE Trans., MAG-18, pp. 594-598
HUA, P., Woo, E. J., TOMPKINS, W. J. and WEBSTER, J. G. (1991): 'Iterative reconstruction methods using regularization and optimal current patterns in electrical impedance tomography', IEEE Trans., MI-10, pp. 621-628.
HUA, P., Woo, E. J., TOMPK|NS, W. J., and WEBSTER, J. G. (1993): 'Finite element modeling of electrode-skin contact impedance in electrical impedance tomography', IEEE Trans., BME-40, (4), pp. 335-343
HUEBNER, K. H., and THORNTON, E. A. (1975): 'The finite element method for engineers' (John Wiley, New York)
KIM, Y. (1982): 'A three-dimensional modifiable computer body model and its applications'. Ph.D. thesis, Dept. of Electrical & Computer Engineering, Univ. Wisconsin, Madison, Wl 53706, USA
KIM Y., TOMIbKINS, W. J., and WEBSTER, J. G. (1983): 'Development of a modifiable computer body model'. Proc. Ann. Int. Conf. IEEE Eng. Med. Biol. Soc., Columbus, Ohio, 5, pp. 45-50
KIM, D. W., BAKER, L. E., PEARCE, J. A., and K|M, W. K. (1988): 'Origins of the impedance change in impedance cardiography by a three-dimensional finite element model', IEEE Trans., BME-35, pp. 993-1000
KOTHIYAL, K. P., SHANKAR, B., FOGELSON, L. J., and THAKOR, N. V. (1988): 'Three-dimensional computer model of electric fields in internal defibrillation' Proc. IEEE, 76, pp. 720--730
LINDHOLM, D. A. (1983): 'Automatic triangular mesh generation on surfaces of polyhedra', IEEE Trans., MAG-19, pp. 2539-2542
LIu, W. P., HUA, P., and WEBSTER, J. G. (1988): 'Three-dimensional reconstruction in electrical impedance tomography', Clin. Phys. PhysioL Meas., 9 Suppl. A, pp. 131-135
MURA|, T., and KAGAWA, Y. (1985): 'Electrical impedance computed tomography based on a finite element model', IEEE Trans., BME-32, pp. 177-184
NATARAJAN, R., and SESHADRt, V. (1976): 'Electric-field distribution in the human body using finite-element method', Med. & Biol. Eng., 14, pp. 489-493
RAMmEZ, I. F., EISENBERG, S. R., LEHR, J. L. and SCHOEN, F. J. (1989): 'Effects of cardiac configuration, paddle placement and paddle size on defibrillation currrent distribution: a finite element model', Med. & Biol. Eng. & Comput., 27, pp. 587-594
SABONNADIERE, J. C., and COULOMB, J. L. (1987): 'Finite element methods in CAD' (Springer-Verlag, New York)
SATO, N., and TINNEY, W. F. (1963): 'Techniques for exploiting the sparsity of the network admittance matrix', IEEE Trans., PAS-82, pp. 944-949
SEPULVEDA, N. G. (1984): 'Electric field distribution in three dimensional regions using the finite element method'. Ph.D. thesis, Dept. Biomed. Eng., Tulane Univ., New Orleans, LA 70118, USA
SEPULVEDA, N. G., WIKSWO, J. P. Jr., and ECHT, D. S. (1990): 'Finite element analysis of cardiac defibrillation current distributions', IEEE Trans., BME-37, pp. 354-365
SIDEMAN, S., BEYAR, R., AZHARI, H., BARTA, E., ADAM, D. R., and DINNAR, U. (1988): 'Three-dimensional computer simulation of the cardiac system, Proc. IEEE, 76, pp. 708-719
TINNEY, W. F., and WALKER, J. W. (1967): 'Direct solutions of sparse network equations by optimally ordered triangular factorization', Proc. IEEE, 55, pp. 1801-1809
TINNEY, W. F., BRANDWAJIN, V., and CHAN, S. M. (1985): 'Sparse vector methods,' IEEE Trans., PAS-104, pp. 295-301
TONe, P., and ROSSETTOS, J. N. (1977): 'Finite element method: basic technique and implementation' (MIT Press, Cambridge, MA)
WEBSTER, J. G. (Ed.) (1990): 'Electrical impedance tomography' (Adam Hilger, Bristol)
WEXLER, A. (1988): 'Electrical impedance imaging in two and three dimensions', Clin. Phys. Physiol. Meas., 9 Supp. A, pp. 26-29
Woo, E. J. (1990): 'Computational complexity' in WEBSTER, (Ed.): Electrical impedance tomography' (Adam Hilger, Bristol)
Woo, E. J., HUA, P., TOMPKINS, W. J., and WEBSTER, J. G. (1993): 'A robust image reconstruction algorithm and its parallel implementation in electrical impedance tomography,' IEEE Trans., MI-I12, (2), pp. 137-146
YORKEY, T. J., WEBSTER, J. G., and TOMPKINS, W. J. (1987): 'Comparing reconstruction algorithms for electrical impedance tomography', IEEE Trans., BME-34, pp. 843-852
Author 's biography Eung Je Woo received his BS and MS degrees in Electronics Engineering from Seoul National University, Korea, in 1983 and 1985, respec- tively. He received his PhD in Electrical Engineering from the University of Wisconsin, Madison, in 1990. He is currently Assistant Professor of Biomedical Engineering at Kon Kuk University, Korea. His research interests include impedance measurement, biomedical
computing and medical instrumentation. He is a member of IEEE, KOSMBE and KITE.
536 Medical & Biological Engineering & Comouting September 1994