ARTICLE IN PRESS - Artificial...
20
UNCORRECTED PROOF A performance-based approach to wheelchair accessible route analysis Charles S. Han 1 , Kincho H. Law * , Jean-Claude Latombe 2 , John C. Kunz a Center for Integrated Facility Engineering, Stanford University, Stanford, CA 94305-4020, USA Received 7 September 2001; revised 29 October 2001; accepted 2 November 2001 Abstract This paper presents a method to determine if a usable wheelchair accessible route in a facility exists using motion-planning techniques. We use a ‘performance-based’ approach to predict the performance of a facility design against requirements of a building code. This approach has advantages over the traditional ‘prescriptive’ code-based approach for assessing acceptability of designs, which is normal practice today for assessing wheelchair accessibility. The prescriptive method can be ambiguous, contradictory, complex, and unduly restrictive in practice, and it can be ad hoc and difficult to implement as a computer application. The performance-based approach directly models the actual possible behaviors of an artifact (in this case, wheelchair motion) that are related to the functional intent of the designed system (a building) and (hopefully) to the specification of a prescriptive building code. This paper presents example cases from architectural practice to illustrate the use of robot motion-planning techniques for wheelchair accessibility analysis. This application is an example of using modern computa- tional methods in support of knowledge-intensive engineering. The simulation method has broad applicability within engineering design. We illustrate and discuss how to analyze virtual simulations of the detailed behavior of a designed artifact in order to assess its use by intended users. q 2001 Elsevier Science Ltd. All rights reserved. Keywords: Motion planning; Disabled access; Wheelchair accessibility; Performance-based analysis 1. Introduction This paper develops a method to determine if a usable wheelchair accessible route in a facility exists using compu- ter-based motion-planning techniques. One concern for designing a facility is the extent to which it satisfies a set of usability objectives. In the US, wheelchair access in private facilities is often an important objective, and certain wheelchair accessibility is a constraint that is mandated by law for most public facilities. The Americans with Disabilities Act Accessibility Guidelines (ADAAG) contain ‘prescriptive’ specifications for determining the existence of a valid wheelchair accessible route as well as other objec- tives for disabled access Advantages of using prescriptive provisions include straightforward evaluation of a design using the prescribed parameters, and such evaluation often does not need high- level engineering knowledge about the specific analysis. However, prescriptive-based codes can be ambiguous, contradictory, complex, and restrictive [6]. Solutions constrained by prescriptive-based codes such as the ADAAG address only a fraction of the possible solutions that meet the design intent or objectives of these codes. Since it often is implicit, it is often difficult for both designers and code checkers to discern the design intent and objectives of a building code or code provision. However, in the case of the ADAAG, the intent is clearly stated as “…scoping and technical requirements for acces- sibility to buildings and facilities by individuals with disabilities…” Furthermore, instances exist in which adhering to these prescriptive provisions produces a design that may not be usable. As a partial solution to the problems of prescriptive-based building codes, many jurisdictions have adopted or are moving toward the adoption of ‘performance-based’ codes. We use the term ‘performance-based’ to imply the performance computed by simulating behavior of models (in this case, a wheelchair in the configuration of a facility). For example, California provides a performance-based alternative to its prescriptive-based energy codes [2]. As opposed to prescriptive-based codes that provide solutions 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 47 48 49 50 51 52 53 54 55 56 57 58 59 60 61 62 63 64 65 66 67 68 69 70 71 72 73 74 75 76 77 78 79 80 81 82 83 84 85 86 87 88 89 90 91 92 93 94 95 96 97 98 99 100 101 102 103 104 105 106 107 108 109 110 111 112 Advanced Engineering Informatics 00 (2002) 000–000 ADVEI2 1474-0346/02/$ - see front matter q 2001 Elsevier Science Ltd. All rights reserved. PII: S1474-0346(01)00003-9 www.elsevier.com/locate/aei * Address: Department of Civil and Environmental Engineering, Stanford University, Stanford, CA 94305-4020, USA. E-mail addresses: [email protected] (C.S. Han), law@ce. stanford.edu (K.H. Law), [email protected] (J.-C. Latombe), [email protected] (J.C. Kunz). 1 Autodesk, Inc., San Rafael, CA 94903, USA. 2 Department of Computer Science, Stanford University, Stanford, CA 94305, USA. ARTICLE IN PRESS Advanced Engineering Informatics – Model 5 – Ref style 3 – AUTOPAGINATION 2 05-12-2001 15:02 article wb A lden
Transcript of ARTICLE IN PRESS - Artificial...

UNCORRECTED PROOF
A performance-based approach to wheelchair accessible route analysis
Charles S. Han1, Kincho H. Law*, Jean-Claude Latombe2, John C. KunzaCenter for Integrated Facility Engineering, Stanford University, Stanford, CA 94305-4020, USA
Received 7 September 2001; revised 29 October 2001; accepted 2 November 2001
Abstract
This paper presents a method to determine if a usable wheelchair accessible route in a facility exists using motion-planning techniques. We
use a `performance-based' approach to predict the performance of a facility design against requirements of a building code. This approach
has advantages over the traditional `prescriptive' code-based approach for assessing acceptability of designs, which is normal practice today
for assessing wheelchair accessibility. The prescriptive method can be ambiguous, contradictory, complex, and unduly restrictive in practice,
and it can be ad hoc and dif®cult to implement as a computer application. The performance-based approach directly models the actual
possible behaviors of an artifact (in this case, wheelchair motion) that are related to the functional intent of the designed system (a building)
and (hopefully) to the speci®cation of a prescriptive building code. This paper presents example cases from architectural practice to illustrate
the use of robot motion-planning techniques for wheelchair accessibility analysis. This application is an example of using modern computa-
tional methods in support of knowledge-intensive engineering. The simulation method has broad applicability within engineering design. We
illustrate and discuss how to analyze virtual simulations of the detailed behavior of a designed artifact in order to assess its use by intended
users. q 2001 Elsevier Science Ltd. All rights reserved.
Keywords: Motion planning; Disabled access; Wheelchair accessibility; Performance-based analysis
1. Introduction
This paper develops a method to determine if a usable
wheelchair accessible route in a facility exists using compu-
ter-based motion-planning techniques. One concern for
designing a facility is the extent to which it satis®es a set
of usability objectives. In the US, wheelchair access in
private facilities is often an important objective, and certain
wheelchair accessibility is a constraint that is mandated
by law for most public facilities. The Americans with
Disabilities Act Accessibility Guidelines (ADAAG) contain
`prescriptive' speci®cations for determining the existence of
a valid wheelchair accessible route as well as other objec-
tives for disabled access
Advantages of using prescriptive provisions include
straightforward evaluation of a design using the prescribed
parameters, and such evaluation often does not need high-
level engineering knowledge about the speci®c analysis.
However, prescriptive-based codes can be ambiguous,
contradictory, complex, and restrictive [6]. Solutions
constrained by prescriptive-based codes such as the
ADAAG address only a fraction of the possible solutions
that meet the design intent or objectives of these codes.
Since it often is implicit, it is often dif®cult for both
designers and code checkers to discern the design intent
and objectives of a building code or code provision.
However, in the case of the ADAAG, the intent is clearly
stated as ª¼scoping and technical requirements for acces-
sibility to buildings and facilities by individuals with
disabilities¼º
Furthermore, instances exist in which adhering to these
prescriptive provisions produces a design that may not be
usable.
As a partial solution to the problems of prescriptive-based
building codes, many jurisdictions have adopted or are
moving toward the adoption of `performance-based'
codes. We use the term `performance-based' to imply the
performance computed by simulating behavior of models
(in this case, a wheelchair in the con®guration of a facility).
For example, California provides a performance-based
alternative to its prescriptive-based energy codes [2]. As
opposed to prescriptive-based codes that provide solutions
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
36
37
38
39
40
41
42
43
44
45
46
47
48
49
50
51
52
53
54
55
56
57
58
59
60
61
62
63
64
65
66
67
68
69
70
71
72
73
74
75
76
77
78
79
80
81
82
83
84
85
86
87
88
89
90
91
92
93
94
95
96
97
98
99
100
101
102
103
104
105
106
107
108
109
110
111
112
Advanced Engineering Informatics 00 (2002) 000±000
ADVEI2
1474-0346/02/$ - see front matter q 2001 Elsevier Science Ltd. All rights reserved.
PII: S1474-0346(01)00003-9
www.elsevier.com/locate/aei
* Address: Department of Civil and Environmental Engineering, Stanford
University, Stanford, CA 94305-4020, USA.
E-mail addresses: [email protected] (C.S. Han), law@ce.
stanford.edu (K.H. Law), [email protected] (J.-C. Latombe),
[email protected] (J.C. Kunz).1 Autodesk, Inc., San Rafael, CA 94903, USA.2 Department of Computer Science, Stanford University, Stanford, CA
94305, USA.
ARTICLE IN PRESS
Advanced Engineering Informatics ± Model 5 ± Ref style 3 ± AUTOPAGINATION 2 05-12-2001 15:02 article wb Alden

UNCORRECTED PROOF
abstracted from the design intent or objective of a building
code, performance-based codes attempt to directly capture
the behaviors that conform to the intent of the design codes
or regulations. This direct performance-based approach
accepts design solutions that satisfy the usability
constraints, including those solutions that do not comply
with the prescriptive-based constraints speci®ed by a design
code. When a performance-based approach accurately
models usability, this approach will identify and reject
design solutions that are not usableÐsome unusable
designs may be accepted using the prescriptive-based
constraints speci®ed by a design code.
This paper presents the methods developed for accessible
route analysis using motion-planning simulation to capture
the behavior of a moving wheelchair. First, we give a brief
overview of motion planning and the technique adopted in
this work. We then provide a de®nition of an accessible
route and its components. Methodologies for the analysis
of accessible components are then discussed. Application
examples are provided to demonstrate the bene®ts of the
performance-based approach. Application of the approach
for the analysis of a ¯oor plan is also given. Finally, this
paper concludes with a short summary and discussion for
future considerations.
2. Basics of motion planning
In basic motion-planning, a robot A moves through a
Euclidean space W (the workspace) represented as RN
where R is the set of real numbers, and N � 2 or 3 is the
spatial dimension. The motion planner for the wheelchair
assumes a two-dimensional space where N � 2: The space
W is populated with obstacles represented as B1, B2,¼, Bq,
and the motion planner parameters are de®ned by the shape,
position, and orientation of A, the Bis, and W. Given the
initial and goal positions and their orientations, the objective
of the motion planner is to determine if a path exists from
the initial to the goal positions and, if so, to generate a
continuous path t through the workspace W for the robot
A avoiding the obstacles Bis. To ®nd a path in a space, the
method ®rst approximates the wheelchair by a disc. Then, it
grows the obstacles isotropically by the radius of this disc.
Finally, the motion planner computes paths between given
points of the resulting free space. The remainder of this
section elaborates the way we applied the approach for the
wheelchair problem.
The motion planner generates a con®guration space C
from the geometric properties of A, the Bis, and W, and it
attempts to construct a path in this con®guration space. In
the new space C, the motion planner transforms robot A to a
point object, and the motion-planning problem becomes one
of generating the path t in C. For a 2-dimensional space W,
the dimension m of the con®guration space C is 3. For
example, a robot A restricted to move in the xy-plane �W �R2� has three degrees of freedom: translations in the x and y
directions and the orientation u . Working in the con®gura-
tion space C instead of the workspace W, the constraints
become more explicit. If the motion planner works directly
with the workspace W, it would have to perform operations
such as collision checking at each proposed path position in
C, the collision-checking operation has already been
addressed for all possible robot positions.
As the motion-planner maps or `shrinks' A to a point
object, an obstacle Bi maps to the C-obstacle CBi by
`growing' its shape based on the geometric parameters
of A and Bi as shown in Fig. 1. The basic algorithm
establishes a reference point with respect to the robot A
and tracing A around the obstacle Bi. The path circum-
scribed by A describes the C-obstacle CBi. If A can freely
rotate, the shape of CBi depends on A's orientation. Fig. 1
illustrates the transformation of an obstacle to a C-obstacle,
given a ®xed orientation of A.
By generating the con®guration space C, the motion
planner transforms the path-planning problem into the
problem of ®nding a smooth curve within C. Now, the
motion planner must guide the robot from the initial point
to the goal point through C. Latombe [7] notes that using
some type of `potential ®eld' is the most successful method
for guiding the robot A. The generated potential ®eld guides
C.S. Han et al. / Advanced Engineering Informatics 00 (2002) 000±0002
113
114
115
116
117
118
119
120
121
122
123
124
125
126
127
128
129
130
131
132
133
134
135
136
137
138
139
140
141
142
143
144
145
146
147
148
149
150
151
152
153
154
155
156
157
158
159
160
161
162
163
164
165
166
167
168
169
170
171
172
173
174
175
176
177
178
179
180
181
182
183
184
185
186
187
188
189
190
191
192
193
194
195
196
197
198
199
200
201
202
203
204
205
206
207
208
209
210
211
212
213
214
215
216
217
218
219
220
221
222
223
224
Fig. 1. Generation of con®guration space. A robot (A) and an obstacle (B) exist in a workspace. The motion planner grows the obstacle in con®guration space
C by adding to B the shadow of A as it moves about the perimeter of B. The planner then reduces the robot to a reference point.
ARTICLE IN PRESS
Advanced Engineering Informatics ± Model 5 ± Ref style 3 ± AUTOPAGINATION 2 05-12-2001 15:02 article wb Alden

UNCORRECTED PROOF
A by forcing it down the gradient from the initial point to the
goal point. The motion planner discretizes C by de®ning a
grid over the space and generates the potential ®eld values
for each grid cell.
Since the motion planner knows the geometric para-
meters of A, the Bis, and W a priori, it can generate potential
®elds free of local minima. The accessible route analysis
developed in this paper uses a potential-®eld-generating
algorithm NF1 as described by Ref. [7], which can be
shown to be free of local minima. The algorithm creates a
potential ®eld that guides the robot A from the initial point
to the goal point on a path t that grazes the C-obstacles.
3. De®nition of the accessible route
The ADAAG de®nes an accessible route as:
Provision 3.5 De®nitions. Accessible Route. A continuous
unobstructed path connecting all accessible elements and
spaces of a building or facility¼
In addition to the above de®nition, the ADAAG
prescribes measurements that de®ne accessibility for
various building elements (such as doors and toilets) along
an accessible route. An accessible route can thus be
described as a sequence of accessible route segments and,
if needed, adequate clearance at the openings of critical
components of a space.
Our motion planning technique determines accessible
route segments in a space between building elements
(such as doors and toilets). In addition, individual elements
are checked for geometric clearances. A complete accessi-
ble route includes many accessible components (including
openings and route segments). The route is considered
accessible if all components in the route are accessible.
The following de®nitions de®ne the terms that we use in
the performance based accessibility analysis:
Rinit the initial position (the starting point of an acces-
sible route or segment of accessible route)
Rgoal the goal position (the ending point of an accessible
route or segment of accessible route)
Rseg a segment of the accessible route between the
initial position Rinit and the ®nal position Rgoal
within a space
Ropen the clearance area at an opening of building
elements
The motion planner generates a path between an initial
point and a goal point. Building components along the
accessible route graph map to the R nodes: Ropen nodes
map to initial and goal points, Rinit nodes map to initial
points, and Rgoal nodes map to goal points. The arcs of the
graph (the Rseg components) map to the generated path
between the R nodes. Fig. 2 shows the potential accessible
route segments and components of a bathroom facility and
the associated accessible graph. Route segments (arcs) are
established between adjacent building elements. It is inter-
esting to note that there are two established goal nodes (and
two route segments) for the toilet at K because the algorithm
models access to the toilet using either a side or a diagonal
transfer. Furthermore, nodes A and B are potential accessi-
ble openings but the doorways at C and D are eliminated as
potential Ropen node since they do not have suf®cient clear-
ance requirements. Also note that each opening Ropen and
each route segment Rseg can be evaluated independently.
In the following, we ®rst discuss the application of a
motion planner for determining the existence of an acces-
sible route segment Rseg. We then discuss the compliance
checking of the component openings, Ropen. Finally, the
determination of the initial and goal positions of various
building elements is discussed.
4. The wheelchair motion planner and determination ofan accessible route segment Rseg
Although the goal of this study is to directly model the
motion of a wheelchair through a space using the actual
wheelchair geometry, the motion planner ®rst tries to verify
C.S. Han et al. / Advanced Engineering Informatics 00 (2002) 000±000 3
225
226
227
228
229
230
231
232
233
234
235
236
237
238
239
240
241
242
243
244
245
246
247
248
249
250
251
252
253
254
255
256
257
258
259
260
261
262
263
264
265
266
267
268
269
270
271
272
273
274
275
276
277
278
279
280
281
282
283
284
285
286
287
288
289
290
291
292
293
294
295
296
297
298
299
300
301
302
303
304
305
306
307
308
309
310
311
312
313
314
315
316
317
318
319
320
321
322
323
324
325
326
327
328
329
330
331
332
333
334
335
336
Fig. 2. Potential accessible route components and accessible graph of a bathroom facility. The left ®gure shows the components (A±K) of a multi-occupant
bathroom. The bold nodes and arcs in the access graph on the right show the path from the entry door to the accessible toilet. The graph shows one accessible
route segment Rseg1 from A to B and two accessible route segments from B to K. Note that the path planner found that G and H are inaccessible from A.
ARTICLE IN PRESS
Advanced Engineering Informatics ± Model 5 ± Ref style 3 ± AUTOPAGINATION 2 05-12-2001 15:03 article wb Alden

UNCORRECTED PROOF
the existence of a `comfortable' width along the route. To
determine an accessible route segment within a space, the
motion planner performs two basic tasks:
1. Verify the existence of adequate clearance width along
the route.
2. Determine if a wheelchair user can negotiate this route
given the assumed geometric and behavioral constraints
of the wheelchair.
4.1. Pass one: determining the clearance width of the
accessible route
The existence of an accessible route is intended to ensure the
usability of a facility for wheelchair-bound users, and in most
cases, the wheelchair user should be able to negotiate the
accessible route using only forward motion. The ADAAG
provision below prescribes the width parameters of the route.
Provision 4.3.3 Width. The minimum clear width of an
accessible route shall be 36 in. (915 mm) except at doors
(see 4.13.5 and 4.13.6). If a person in a wheelchair must
make a turn around an obstruction, the minimum clear
width of the accessible route shall be as shown in Fig.
7(a) and (b).3
For the ®rst pass, we focus on the general 36 in. (915 mm)
requirement on the accessible route. The exception rule for
turn around will be discussed later for constructing the second
pass. The general 36 in. (915 mm) width rule does not repre-
sent the width of a wheelchair but prescribes a `comfortable'
width for the wheelchair user to negotiate. To satisfy the
provision, the motion planner uses a 36 in. (915 mm) disc to
describe the geometry of the robot A36. Given the workspace
W as determined by the ¯oor space and the building compo-
nents, the motion planner generates the con®guration space
C36 given A36 and W. The path generated by this planner is not
subject to geometric and physical constraints (such as turning
radius) of a robotÐthe robot simply slips and slides down the
potential gradient. This type of planner is known as a holo-
nomic planner [7]. Fig. 3 illustrates the C36 con®guration
space for a bathroom facility example. The white (non-
shaped) areas represent legal positions for the A36 disc robot
and are ensured to provide a 36 in. (915 mm) clearance. Note
that the motion planner treats a doorway with the door in the
closed position, and, hence, in the con®guration space be-
tween the entry door and the accessible toilet is discontinuous.
For this pass, the motion planner does not actually gener-
ate the path. It simply generates the potential ®eld from the
goal points to the initial points. If the potential-®eld genera-
tion cannot reach the initial point, there is no 36 in.
(915 mm) width path between the two points, and an acces-
sible wheelchair route between the points does not exist. If,
however, the potential-®eld generation does reach the initial
point signifying that a 36 in. (915 mm) wide path does exist
between the two points, the motion planner proceeds to the
second pass. Fig. 4 illustrates the actual potential ®eld
generated between the entry door and a urinal using a
C.S. Han et al. / Advanced Engineering Informatics 00 (2002) 000±0004
337
338
339
340
341
342
343
344
345
346
347
348
349
350
351
352
353
354
355
356
357
358
359
360
361
362
363
364
365
366
367
368
369
370
371
372
373
374
375
376
377
378
379
380
381
382
383
384
385
386
387
388
389
390
391
392
393
394
395
396
397
398
399
400
401
402
403
404
405
406
407
408
409
410
411
412
413
414
415
416
417
418
419
420
421
422
423
424
425
426
427
428
429
430
431
432
433
434
435
436
437
438
439
440
441
442
443
444
445
446
447
4483 Note that ADAAG Fig. 7(a) and (b) are shown in this paper as Fig. 5.
Fig. 3. The C36 con®guration space for a bathroom facility. White areas show spaces in which a 36 in. disk can move.
ARTICLE IN PRESS
Advanced Engineering Informatics ± Model 5 ± Ref style 3 ± AUTOPAGINATION 2 05-12-2001 15:03 article wb Alden

UNCORRECTED PROOF1 in. cell discretization and a 12-sided polygon with a 36 in.
(915 mm) diameter for the A36 robot. The contour lines
illustrate the rectangular `Manhattan' nature of the gener-
ated potential ®eld [7].
4.2. Pass two: capturing the characteristics of wheelchair
motion
To closely examine exceptional rules, e.g. the clear width
of an accessible route around an obstruction, we need to be
able to capture the behavior of wheelchair motion. Fig. 5
illustrates the two ADAAG ®gures (Fig. 7(a) and (b)) refer-
enced by Provision 4.3.3 of the ADAAG. Note that in the
prescriptive width de®nition, the exceptional rules and the
associated ®gures do not address all possible turn-around
con®gurations. In order to provide accessibility check on
all possible con®gurations, the route planner models, as
closely as possible, the behavior of wheelchair motion as
to the level of detail set by the guidelines.
In the second pass, in addition to the C36 con®guration
C.S. Han et al. / Advanced Engineering Informatics 00 (2002) 000±000 5
449
450
451
452
453
454
455
456
457
458
459
460
461
462
463
464
465
466
467
468
469
470
471
472
473
474
475
476
477
478
479
480
481
482
483
484
485
486
487
488
489
490
491
492
493
494
495
496
497
498
499
500
501
502
503
504
505
506
507
508
509
510
511
512
513
514
515
516
517
518
519
520
521
522
523
524
525
526
527
528
529
530
531
532
533
534
535
536
537
538
539
540
541
542
543
544
545
546
547
548
549
550
551
552
553
554
555
556
557
558
559
560
Fig. 4. The potential ®eld between the initial entry door and the goal right urinal of the bathroom design of Fig. 2. The robot path-planner ®nds the potential
®eld and ®nds any routes within the ®eld.
Fig. 5. Minimum accessible route turning clearances de®ned in Provision 4.3.3 of the ADAAG. These exceptional provisions are examples of the many
exceptional rules that prescriptive code speci®cations represent explicitly.
ARTICLE IN PRESS
Advanced Engineering Informatics ± Model 5 ± Ref style 3 ± AUTOPAGINATION 2 05-12-2001 15:03 article wb Alden

UNCORRECTED PROOF
space generated in the ®rst pass, con®guration spaces are
also generated using the actual wheelchair robot denoted as
Awc. Fig. 6 shows the reference wheelchair dimensions as
given in the ADAAG, and Fig. 7 illustrates the geometry of
the wheelchair robot which has its width less than 36 in.
(915 mm) wide. The potential ®elds within the con®gura-
tion spaces generated by the planner are used as a guide to
determine the path t for Awc.
Since Awc is not a disc, the motion planner must keep
track of the robot's orientation while generating a path,
and the motion planner must check each wheelchair position
and orientation against the obstacles in the space. The
motion planner discretizes the rotation space into n con®g-
uration spaces Cwc0¼Cwcn where the angle (in radians)
between two consecutive orientations Awc is equal to 2p/
n. Now, the motion planner can check the wheelchair posi-
tion and orientation �x; y; u� against each appropriate con®g-
uration space Cwci. The motion planner generates a non-
holonomic path [8] by restricting Awc to three moves: a
left turn, a right turn, and a straight-ahead move. Fig. 8
illustrates these three options. For the left and right turns,
the motion planner describes the vertex of the turning angle
as the perpendicular length r from the centerpoint between
the major wheelchair wheels. The motion planner records
the actual position of Awc at the centerpoint of the half-
dodecagon at the front of the robot. The displacement
distance D from either turn (which is dependent on r)
dictates the translation of Awc.
4.2.1. Determination of turning radii for the wheelchair
The performance-based accessible route path planner
employs two values r1 and r2 for the turning radius r to
allow adjustment for maneuvering the wheelchair. The
larger turning radius r1 is employed to move the wheelchair
robot to the goal point. As the wheelchair user nears a goal,
the user naturally slows down allowing ®ner maneuvering
with a smaller turning radius r2. In this study, when the
wheelchair has moved within an 18 in. (460 mm) locus of
the goal point, the motion planner switches to the smaller
turning radius r2 to try to maneuver Awc to the goal point
with an acceptable orientation.
In determining the value for the turning radius, a larger
value represents a larger turning circle and a more comfor-
table path t for the wheelchair user. The largest possible
value for r1 was determined using a trial and error process
using the two turning-around-an-obstruction con®gurations
based the ADAAG Provision 4.3.3 shown in Fig. 5. Figs. 9
and 10 illustrate the ®rst legal paths with an r1-value that
works for both turning-around-an-obstruction con®gura-
tions produced by a trial-and-error process. Through this
process, we selected 24 in. (610 mm) as the value of the
larger turning radius r1.
As with the determination of r1, a trial-and-error process
was employed to determine the smaller turning radius r2
based on Provision 4.2.3 of the ADAAG:
Provision 4.2.3 Wheelchair Turning Space. The space
required for a wheelchair to make a 1808 turn is a clear
space of 60 in (1525 mm) diameter (see Fig. 3(a)) or a T-
shaped space (see Fig. 3(b)).4
Fig. 10 shows the ADAAG ®gures associated with this
provision. The turning radius r2 is determined by ®nding the
maximum turning radius that can make Awc perform the
turning maneuver in a 60 in. (1525 mm) space. Fig. 11 illus-
trates the turning maneuver that satis®es the 60 in.
(1525 mm) width constraint (as shown by the dimension
C.S. Han et al. / Advanced Engineering Informatics 00 (2002) 000±0006
561
562
563
564
565
566
567
568
569
570
571
572
573
574
575
576
577
578
579
580
581
582
583
584
585
586
587
588
589
590
591
592
593
594
595
596
597
598
599
600
601
602
603
604
605
606
607
608
609
610
611
612
613
614
615
616
617
618
619
620
621
622
623
624
625
626
627
628
629
630
631
632
633
634
635
636
637
638
639
640
641
642
643
644
645
646
647
648
649
650
651
652
653
654
655
656
657
658
659
660
661
662
663
664
665
666
667
668
669
670
671
672
Fig. 6. Wheelchair dimensions as shown in the ADAAG. The wheelchair model represents these design speci®cations explicitly.
Fig. 7. Dimensions of the robot Awc. The robot path-planner represents the
dimensions shown in this ®gure in its model of a wheelchair. 4 Note that ADAAG Fig. 3(a) and (b) are shown in this paper as Fig. 10.
ARTICLE IN PRESS
Advanced Engineering Informatics ± Model 5 ± Ref style 3 ± AUTOPAGINATION 2 05-12-2001 15:03 article wb Alden

UNCORRECTED PROOF
line) using a turning radius r2 of 9 in. (230 mm). It should be
noted that while this clearance width of 60 in. (1525 mm) is
suf®cient, the necessary clearance width orthogonal to the
dimensioned clearance exceeds the 60 in. (1525 mm)
diameter requirement. Indeed, this clearance width, in prac-
tice, should exceed the 60 in. (1525 mm) as discussed in the
Appendix of the ADAAG:
Provision A4.2.3 Wheelchair Turning Space. These
guidelines specify a minimum space of 60 in.
(1525 mm) diameter or a 60 in. by 60 in. (1525 mm by
1525 mm) T-shaped space for a pivoting 1808 turn of a
wheelchair. This space is usually satisfactory for turning
around, but many people will not be able to turn without
repeated tries and bumping into surrounding objects. The
space shown in Fig. A2 will allow most wheelchair users
to complete U-turns without dif®culty.5
Fig. 12 (ADAAG Fig. A2) illustrates an acceptable clear-
ance oval, and the turning movement as shown in Fig. 11 ®ts
into the suggested oval geometry.
4.2.2. Wheelchair motion planner and path generation
The motion planner uses the potential ®eld in the con®g-
uration space C36 to guide the wheelchair robot Awc as
follows: starting from the initial position and orientation
C.S. Han et al. / Advanced Engineering Informatics 00 (2002) 000±000 7
673
674
675
676
677
678
679
680
681
682
683
684
685
686
687
688
689
690
691
692
693
694
695
696
697
698
699
700
701
702
703
704
705
706
707
708
709
710
711
712
713
714
715
716
717
718
719
720
721
722
723
724
725
726
727
728
729
730
731
732
733
734
735
736
737
738
739
740
741
742
743
744
745
746
747
748
749
750
751
752
753
754
755
756
757
758
759
760
761
762
763
764
765
766
767
768
769
770
771
772
773
774
775
776
777
778
779
780
781
782
783
784
Fig. 8. The three movement behaviors (move left, right, and forward) for the Awc robot.
Fig. 9. Determination of the large turning radius (r1 � 24 00 (610 mm)) for the exception in Provision 4.3.3 of the ADAAG.
5 Note that ADAAG Fig. A2 is shown in this paper as Fig. 12.
ARTICLE IN PRESS
Advanced Engineering Informatics ± Model 5 ± Ref style 3 ± AUTOPAGINATION 2 05-12-2001 15:03 article wb Alden

UNCORRECTED PROOF
qinit, the motion planner examines the move options for left,
right, and straight ahead (denoted as qleft, qright, and qstraight,
respectively) using r1 as the turning radius for the robot.
1. If qleft resides in the C36 and appropriate Cwci con®gura-
tion space, the motion planner compares the position
�x; y� associated with qleft with the position �x; y� asso-
ciated with qgoal.
2. If the two positions are not the same, the motion planner
looks up the potential ®eld of the position and inserts the
node into a priority queue, which prioritizes the nodes by
their potential ®eld value (the lower the value, the higher
the priority).
3. Finally, the motion planner inserts a pointer to the
previous position (in this case, qinit) in the node and
marks qleft in the appropriate Cwci con®guration space
potential ®eld as having been already visited.
The motion planner repeats this procedure for qright and
qstraight.
The motion planner continues the iterative process by
removing the highest priority node (the node with the lowest
potential value) from the priority queue and examining the
C.S. Han et al. / Advanced Engineering Informatics 00 (2002) 000±0008
785
786
787
788
789
790
791
792
793
794
795
796
797
798
799
800
801
802
803
804
805
806
807
808
809
810
811
812
813
814
815
816
817
818
819
820
821
822
823
824
825
826
827
828
829
830
831
832
833
834
835
836
837
838
839
840
841
842
843
844
845
846
847
848
849
850
851
852
853
854
855
856
857
858
859
860
861
862
863
864
865
866
867
868
869
870
871
872
873
874
875
876
877
878
879
880
881
882
883
884
885
886
887
888
889
890
891
892
893
894
895
896
Fig. 10. The prescribed turning circle and T-space from the ADAAG.
Fig. 11. Determination of the small turning radius (r2 � 9 00 (230 mm)) for
use by the motion planner to address the issue of Provision 4.2.3 of the
ADAAG. Fig. 12. The ADAAG turning clearance geometry.
ARTICLE IN PRESS
Advanced Engineering Informatics ± Model 5 ± Ref style 3 ± AUTOPAGINATION 2 05-12-2001 15:03 article wb Alden

UNCORRECTED PROOF
three move options from the associated position and orien-
tation q. The Cwci con®guration spaces include the visited as
well as the free space information, and the motion planner
treats a visited qinit as an obstacle. When q is within an 18 in.
(460 mm) locus of qgoal, the planner starts generating new
positions using the smaller turning radius r2. When the robot
reaches the goal position, the motion planner examines
whether the orientation u associated with the current q is
within the allowable range of u goal and, if so, it records the
path t . The iterative process continues until either the
motion planner empties the priority queue (indicating no
path t exists) or the position �x; y� associated with the
current q matches with qgoal for both position and the accep-
table orientation range.Fig. 13 illustrates a generated path
from the entry door to the urinal in the bathroom facility.
5. Accessibility analysis of Ropen components
ADAAG prescribes wheelchair clearances at doors and
entrances along an accessible route. The Ropen node of an
accessible route graph consists of three clearance compo-
nents: the clearance of the opening and clearances on either
side of the opening. For the opening, the analysis applies a
geometric test with the parameters of the required clearance
box taken directly from the following provision:
Provision 4.13.5 Clear Width. Doorways shall have a
minimum clear opening of 32 in. (815 mm) with the
door open 908, measured between the face of the door
and the opposite stop (see Fig. 24(a)±(d)). Openings
more than 24 in. (610 mm) in depth shall comply with
Provisions 4.2.1 and 4.3.3 (see Fig. 24(e)).6
EXCEPTION: Doors not requiring full user passage, such
as shallow closets, may have the clear opening reduced to
20 in. (510 mm) minimum.
Fig. 14 shows the ADAAG ®gure that prescribes wheel-
chair clearances for doors. Note that the clearance geome-
tries are dependent on the approach of the wheelchair and
additional parameters speci®c to the building element. For
example, for doors, the clearance geometry may be depen-
dent on the direction of the swing. For a single swinging
door, the ADAAG de®nes the side from which the user pulls
the door to open it as the pull side and the side from which
the user pushes the door to open it as the push side. From
each side, the user can approach the opening from the front,
hinge side, or latch side of the door:
² For the front pull side approach, the clearance box
extends 60 in. (1525 mm) from the wall that contains
the opening and the door and covers the width of the
opening plus 18 in. (460 mm) on the latch side of the
door (left picture of Fig. 14(a)).
² For the front push side approach, the clearance box
extends 48 in. (1220 mm) from the wall and covers the
C.S. Han et al. / Advanced Engineering Informatics 00 (2002) 000±000 9
897
898
899
900
901
902
903
904
905
906
907
908
909
910
911
912
913
914
915
916
917
918
919
920
921
922
923
924
925
926
927
928
929
930
931
932
933
934
935
936
937
938
939
940
941
942
943
944
945
946
947
948
949
950
951
952
953
954
955
956
957
958
959
960
961
962
963
964
965
966
967
968
969
970
971
972
973
974
975
976
977
978
979
980
981
982
983
984
985
986
987
988
989
990
991
992
993
994
995
996
997
998
999
1000
1001
1002
1003
1004
1005
1006
1007
1008
Fig. 13. The generated path from the initial doorway entry to the goal right urinal in the bathroom facility. The ®rst part of the path uses the larger r1 turning
radius, and the last part of the path uses the smaller r2 turning radius.
6 Note that these ®gures are not shown in this paper.
ARTICLE IN PRESS
Advanced Engineering Informatics ± Model 5 ± Ref style 3 ± AUTOPAGINATION 2 05-12-2001 15:04 article wb Alden

UNCORRECTED PROOF
width of the opening plus 12 in. (305 mm) on the latch
side if the door has a closer and a latch (right picture of
Fig. 14(a)).
² For the hinge pull side approach, the clearance box extends
60 in. (1525 mm) from the wall and covers the width of the
opening plus 36 in. (915 mm) on the latch side. Or the
clearance box extends at least 54 in. (1370 mm) from the
wall and covers the width of the opening plus 42 in.
(1065 mm) on the latch side (left picture of Fig. 14(b)).
² For the hinge push side approach, the clearance box
extends 42 in. (1065 mm) from the wall (48 in.
(1220 mm) if the door has a latch and closer) and covers
the width of 54 in. (1370 mm) from the latch side extend-
ing toward the hinge side (right picture of Fig. 14(b)).
² For the latch pull side approach, the clearance box
extends 48 in. (1220 mm) from the wall (54 in.
(1370 mm) if the door has a latch and closer) and covers
the width of the opening plus 24 in. (610 mm) on the
latch side (left picture of Fig. 14(c)).
² For the latch push side approach, the clearance box
extends 42 in. (1065 mm) from the wall (48 in.
(1220 mm) if the door has a latch and closer) and covers
C.S. Han et al. / Advanced Engineering Informatics 00 (2002) 000±00010
1009
1010
1011
1012
1013
1014
1015
1016
1017
1018
1019
1020
1021
1022
1023
1024
1025
1026
1027
1028
1029
1030
1031
1032
1033
1034
1035
1036
1037
1038
1039
1040
1041
1042
1043
1044
1045
1046
1047
1048
1049
1050
1051
1052
1053
1054
1055
1056
1057
1058
1059
1060
1061
1062
1063
1064
1065
1066
1067
1068
1069
1070
1071
1072
1073
1074
1075
1076
1077
1078
1079
1080
1081
1082
1083
1084
1085
1086
1087
1088
1089
1090
1091
1092
1093
1094
1095
1096
1097
1098
1099
1100
1101
1102
1103
1104
1105
1106
1107
1108
1109
1110
1111
1112
1113
1114
1115
1116
1117
1118
1119
1120
Fig. 14. Door approaches and wheelchair clearance. The motion planner models the different door approaches and clearances, based on the de®nitions of the
ADAAG.
ARTICLE IN PRESS
Advanced Engineering Informatics ± Model 5 ± Ref style 3 ± AUTOPAGINATION 2 05-12-2001 15:04 article wb Alden

UNCORRECTED PROOF
the width of the opening plus 24 in. (610 mm) on the
latch side (right picture of Fig. 14(c)).
The accessible route analysis examines all possible
approaches by performing geometry interference tests on
the associated clearance boxes. Failure of all interference
tests for either the pull or push side disquali®es the potential
Ropen component. Conversely, if at least one clearance box
on either side passes the interference test, the potential Ropen
component quali®es as accessible and assigned as a node in
the accessible route graph.
6. Determining the initial and goal points Rinit and Rgoal ofan accessible segment
Each accessible route segment starts from an initial point
and ends at a goal point. To automatically generate and
check a route segment using the motion planner, it is neces-
sary to determine the initial and goal positions of the build-
ing elements. The following describes the determination of
the initial and goal points for certain building elements, such
as doors and openings and the toilet.
6.1. Doors and openings
Since the potential opening component is a node in the
accessible route graph, the component provides the initial/
goal point for a route segment Rseg. Fig. 15 illustrates the
positions of the initial and goal points associated with the
opening. Since the motion planner uses the initial and goal
points to generate the potential ®eld in the C36 con®guration
space, the ®gure shows the circular A36 robot as well as the
Awc robot. The Awc robot shown in the ®gure has a ®xed
orientation associated with the initial points. However, the
motion planner accepts any orientation within a 908 range
for the orientation of the Awc robot at the goal position. Note
that when passing through a door opening, the wheelchair
goes from the goal point of a path segment on one side of the
door opening to the initial point of another path segment on
the opposite side of the door opening. The goal point±initial
point sequence through a door opening is either (b)±(c) or
(d)±(a) from the ®gures shown in Fig. 15. The door opening
goal point and initial point parameters as shown in Fig. 15
guarantee that a path exists from the goal point±initial point
pair.
6.2. Water closet
In general, an Rgoal node maps to one goal point. However,
for certain accessible building elements such as toilet, the
motion planner needs to establish more than one goal point
to check whether a component is accessible. Fig. 16 illus-
trates water closet usage by a wheelchair user, an action
known as wheelchair transfer. As shown in the ®gure, the
wheelchair user can transfer from the wheelchair to the
toilet via two fundamentally different methods: diagonal
transfer and side transfer. Thus, the motion planner speci®es
C.S. Han et al. / Advanced Engineering Informatics 00 (2002) 000±000 11
1121
1122
1123
1124
1125
1126
1127
1128
1129
1130
1131
1132
1133
1134
1135
1136
1137
1138
1139
1140
1141
1142
1143
1144
1145
1146
1147
1148
1149
1150
1151
1152
1153
1154
1155
1156
1157
1158
1159
1160
1161
1162
1163
1164
1165
1166
1167
1168
1169
1170
1171
1172
1173
1174
1175
1176
1177
1178
1179
1180
1181
1182
1183
1184
1185
1186
1187
1188
1189
1190
1191
1192
1193
1194
1195
1196
1197
1198
1199
1200
1201
1202
1203
1204
1205
1206
1207
1208
1209
1210
1211
1212
1213
1214
1215
1216
1217
1218
1219
1220
1221
1222
1223
1224
1225
1226
1227
1228
1229
1230
1231
1232
Fig. 15. Initial and goal points for the Ropen node. The wheelchair moves forward, i.e. up in ®gures (a) and (c) and down in ®gures (b) and (d). The goal of one
segment, e.g. (b) becomes the initial point of a connected segment, e.g. (c).
ARTICLE IN PRESS
Advanced Engineering Informatics ± Model 5 ± Ref style 3 ± AUTOPAGINATION 2 05-12-2001 15:04 article wb Alden

UNCORRECTED PROOF
two different goal points and orientations to re¯ect the
different methods.
Fig. 17 illustrates the two goal points and orientations
associated with the two transfer options. Note that for the
side transfer, the goal point and orientation of the wheel-
chair robot illustrated in Fig. 17(b) does not directly corre-
spond to the side transfer position illustrated in Fig. 16(b).
Currently, the motion planner restricts the wheelchair to
only forward motion, and the ADAAG assumes backing
up to the ®nal side transfer position. Therefore, the motion
C.S. Han et al. / Advanced Engineering Informatics 00 (2002) 000±00012
1233
1234
1235
1236
1237
1238
1239
1240
1241
1242
1243
1244
1245
1246
1247
1248
1249
1250
1251
1252
1253
1254
1255
1256
1257
1258
1259
1260
1261
1262
1263
1264
1265
1266
1267
1268
1269
1270
1271
1272
1273
1274
1275
1276
1277
1278
1279
1280
1281
1282
1283
1284
1285
1286
1287
1288
1289
1290
1291
1292
1293
1294
1295
1296
1297
1298
1299
1300
1301
1302
1303
1304
1305
1306
1307
1308
1309
1310
1311
1312
1313
1314
1315
1316
1317
1318
1319
1320
1321
1322
1323
1324
1325
1326
1327
1328
1329
1330
1331
1332
1333
1334
1335
1336
1337
1338
1339
1340
1341
1342
1343
1344
Fig. 16. Wheelchair transfer diagrams for water closets from ADAAG. The motion planner de®nes both side and diagonal transfer behaviors.
Fig. 17. Goal points for diagonal and side transfers.
ARTICLE IN PRESS
Advanced Engineering Informatics ± Model 5 ± Ref style 3 ± AUTOPAGINATION 2 05-12-2001 15:04 article wb Alden

UNCORRECTED PROOF
planner positions the wheelchair robot such that it is possi-
ble to make the backup move to the ®nal side transfer
position.
7. Prescriptive code analysis and performance-basedusability analysis
Because of the prescriptive nature of the disabled access
code, it cannot address all possible building design con®g-
urations or wheelchair use patterns; the code limits the
special cases it addresses to the turn-around-an-obstruction
exceptions. In practice, wheelchair users can comfortably
use a large number of design con®gurations that do not
comply with the prescriptive accessible route provisions
from the ADAAG. On the other hand, a design con®guration
which is code complied does not necessarily imply acces-
sible. Here, we analyze design con®gurations against the
prescriptive parameters as given in the ADAAG and
compare the results to the performance-based analysis
based on the motion planner.
For a given con®guration, the following four scenarios for
accessibility are possible:
² Code-compliant and usable.
² Not code-compliant and usable (Section 7.1).
² Code-compliant and unusable (Section 7.2).
² Not code-compliant and unusable.
The performance-based analysis uses speci®c provisions
from the ADAAG to instantiate the turning radius para-
meters, and by default, the tested con®gurations were both
code-compliant and usable. Providing examples that are
both non-compliant and unusable can also be trivially
demonstrated, for example, with a less-than 36 in. wide
(915 mm wide) corridor. The following examples illustrate
a non-compliant route that a wheelchair user can actually
negotiate and a code-compliant route that a wheelchair user
cannot negotiate.
7.1. Example 1
The ®rst example presents a design con®guration illu-
strated in Fig. 18 that falls under the U-turn-around-an-
obstacle exception category: the width of the obstruction
is less than 48 in. (1220 mm), and the con®guration cannot
be transformed into the 908-turn-around-an-obstacle excep-
tion by making the obstruction wider than 48 in. (1220 mm).
Following the parameters of the ADAAG Provision 4.3.3,
the con®guration fails to comply with the exception that:
² The widths of the ®rst and third legs are less than 42 in.
(1065 mm).
² The width of the second leg is less than 48 in. (1220 mm).
Using the performance-based parameters for the turning
C.S. Han et al. / Advanced Engineering Informatics 00 (2002) 000±000 13
1345
1346
1347
1348
1349
1350
1351
1352
1353
1354
1355
1356
1357
1358
1359
1360
1361
1362
1363
1364
1365
1366
1367
1368
1369
1370
1371
1372
1373
1374
1375
1376
1377
1378
1379
1380
1381
1382
1383
1384
1385
1386
1387
1388
1389
1390
1391
1392
1393
1394
1395
1396
1397
1398
1399
1400
1401
1402
1403
1404
1405
1406
1407
1408
1409
1410
1411
1412
1413
1414
1415
1416
1417
1418
1419
1420
1421
1422
1423
1424
1425
1426
1427
1428
1429
1430
1431
1432
1433
1434
1435
1436
1437
1438
1439
1440
1441
1442
1443
1444
1445
1446
1447
1448
1449
1450
1451
1452
1453
1454
1455
1456
Fig. 18. Example of an U-turn-around an obstacle exception. This trace of a wheelchair path around an obstruction illustrates that the performance-based path-
planner can determine that a path can be accessible, although non-compliant with the prescriptive code.
ARTICLE IN PRESS
Advanced Engineering Informatics ± Model 5 ± Ref style 3 ± AUTOPAGINATION 2 05-12-2001 15:04 article wb Alden

UNCORRECTED PROOF
radii established in the performance-based analysis, the
motion planning simulation returns a successful path taround the obstruction for the non-compliant con®guration
as illustrated in the ®gure. Thus, from the performance
perspective, the motion planner deems that the con®guration
is usable by a wheelchair user.
This example demonstrates that the wheelchair model
constructed from the constraints of the two ADAAG U-
turn con®gurations can successfully navigate through a
non-compliant U-turn con®gurationÐhowever, such a
demonstration simply points out that the code might be
too conservative.
7.2. Example 2
Fig. 19 shows a con®guration that is a code-complied but
unusable situation. Following the parameters given in the
ADAAG Provision 4.3.3, the design complies with the code
in that:
² The accessible route is equal to or greater than 36 in.
wide.
² Since it is not a 1808 U-turn, the turn-around-an-obstruc-
tion exception does not apply.
Using the performance-based parameters, the motion
planning simulation fails to return a path t around the
obstruction for the code-compliant con®guration. By trial
and error, one can extend the length of the second leg to
®nd a usable design con®guration shown in Fig. 20.
This example illustrates ambiguities that exist in current
prescriptive code. First, note that if the angle between the
second and third leg equals 908 instead of exceeding 908, the
®rst turn-around-an-obstruction exception from Provision
4.3.3 might apply. The building of®cial may contend that
the exception applies with a small angular increment e , but
as e grows, the con®guration does not qualify for the excep-
tion. The ambiguity of at what point the prescribed con®g-
uration applies illustrates the dif®culty of applying a
prescriptive-based code directly. On the other hand, by
changing the angle between the second and third legs of
the route from 908 1 e to 908 or 908 2 e , the motion planner
demonstrates the overly restrictive nature of the 908-turn-
around-an-obstruction exception from Provision 4.3.3.
While not explicitly stated, the exception should apply to
angles less than 908 since this con®guration would consti-
tute a more dif®cult accessible route. Furthermore, as illu-
strated in Fig. 20, the second and third leg dimensions
provide a viable path t around the obstruction, and these
lengths are clearly less than the required 48 in./42 in.
(1220 mm/1065 mm) exception requirement, as in the
provision.
8. Accessibility analysis of ¯oor layout
We applied the methodology to analyze the accessibility
of the ¯oor plan for an existing building as shown in Fig. 21.
Fig. 22 shows the analysis report with a view of the modeled
¯oor plan [3]. The comments associated with inaccessible
building components have links to the prescriptive provi-
sions of the ADAAG document as an informative guide.
The analysis reports shown in Fig. 22 reports that there is
no accessible route to the water closet in the men's bath-
room, and thus there is no accessible toilet in the building.
C.S. Han et al. / Advanced Engineering Informatics 00 (2002) 000±00014
1457
1458
1459
1460
1461
1462
1463
1464
1465
1466
1467
1468
1469
1470
1471
1472
1473
1474
1475
1476
1477
1478
1479
1480
1481
1482
1483
1484
1485
1486
1487
1488
1489
1490
1491
1492
1493
1494
1495
1496
1497
1498
1499
1500
1501
1502
1503
1504
1505
1506
1507
1508
1509
1510
1511
1512
1513
1514
1515
1516
1517
1518
1519
1520
1521
1522
1523
1524
1525
1526
1527
1528
1529
1530
1531
1532
1533
1534
1535
1536
1537
1538
1539
1540
1541
1542
1543
1544
1545
1546
1547
1548
1549
1550
1551
1552
1553
1554
1555
1556
1557
1558
1559
1560
1561
1562
1563
1564
1565
1566
1567
1568
Fig. 19. Example of a code-compliant but unusable con®guration. This design example is accessibility-compliant, but the motion planner shows that it is
unusable.
ARTICLE IN PRESS
Advanced Engineering Informatics ± Model 5 ± Ref style 3 ± AUTOPAGINATION 2 05-12-2001 15:04 article wb Alden

UNCORRECTED PROOF
Fig. 23 con®rms the inaccessibility of the water closet. Here,
the wheelchair user is not able to pass through the stall's
doorway. It is interesting to note that the partition walls
were added to the original plan to ensure privacy for the
toilet user. Ironically, the addition of these walls made the
toilet inaccessible to wheelchair users. With the removal of
the partitions, the men's bathroom would revert back to a
single-occupancy from a multiple-occupancy. As shown in
Fig. 24, without the partition walls, the motion planner
generates an accessible route to the toilet. Note that the
C.S. Han et al. / Advanced Engineering Informatics 00 (2002) 000±000 15
1569
1570
1571
1572
1573
1574
1575
1576
1577
1578
1579
1580
1581
1582
1583
1584
1585
1586
1587
1588
1589
1590
1591
1592
1593
1594
1595
1596
1597
1598
1599
1600
1601
1602
1603
1604
1605
1606
1607
1608
1609
1610
1611
1612
1613
1614
1615
1616
1617
1618
1619
1620
1621
1622
1623
1624
1625
1626
1627
1628
1629
1630
1631
1632
1633
1634
1635
1636
1637
1638
1639
1640
1641
1642
1643
1644
1645
1646
1647
1648
1649
1650
1651
1652
1653
1654
1655
1656
1657
1658
1659
1660
1661
1662
1663
1664
1665
1666
1667
1668
1669
1670
1671
1672
1673
1674
1675
1676
1677
1678
1679
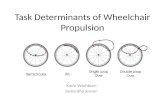
1680Fig. 21. Floor plan of an actual facility. As shown in Fig. 22, the motion planner found that it lacked wheelchair accessibility to the men's toilet. As shown in
Fig. 23, the men's toilet is indeed inaccessible to a wheelchair user.
Fig. 20. Example of a viable but non-compliant path around an obstruction. With the motion planner incorporated into a design system, a designer could
recognize a problem such as that of Fig. 19, change the building design model, and immediately use the path planner to assess usability of design variants, such
as this one.
ARTICLE IN PRESS
Advanced Engineering Informatics ± Model 5 ± Ref style 3 ± AUTOPAGINATION 2 05-12-2001 15:05 article wb Alden

UNCORRECTED PROOF
path is discontinuous between adjacent spaces since the
route segments are generated between building elements
and the openings and entrances are checked independently.
We performed similar analyses to check access to other
facilities such as the bookshelf, the women's bathroom
and the interview room, etc. [4].
9. Summary and discussion
This paper discusses the nature and bene®ts of perfor-
mance-based analysis of wheelchair accessibility of a facil-
ity using motion planning techniques developed in robotics
research. In the practices of architects, wheelchair designers
and wheelchair users and in its computer implementation,
wheelchair accessibility is a knowledge-intensive activity.
This paper discusses one approach to implementation of
knowledge-intensive engineering analysis in the computer
and our results in applying this approach. Built on the prac-
tice of architecture, the design of building codes, theory of
robotic motion planning and building product models, this
work is an example of the multidisciplinary engineering
informatics methods that have started to demonstrate high
performance in applications of computers in engineering.
Traditional expert systems have tried to replicate the knowl-
edge-intensive practices of practitioners, but their imple-
mentations have often proved to be ad hoc in design and
brittle in performance [9].
The performance-based motion-planning techniques
developed directly capture motion and behavior given the
C.S. Han et al. / Advanced Engineering Informatics 00 (2002) 000±00016
1681
1682
1683
1684
1685
1686
1687
1688
1689
1690
1691
1692
1693
1694
1695
1696
1697
1698
1699
1700
1701
1702
1703
1704
1705
1706
1707
1708
1709
1710
1711
1712
1713
1714
1715
1716
1717
1718
1719
1720
1721
1722
1723
1724
1725
1726
1727
1728
1729
1730
1731
1732
1733
1734
1735
1736
1737
1738
1739
1740
1741
1742
1743
1744
1745
1746
1747
1748
1749
1750
1751
1752
1753
1754
1755
1756
1757
1758
1759
1760
1761
1762
1763
1764
1765
1766
1767
1768
1769
1770
1771
1772
1773
1774
1775
1776
1777
1778
1779
1780
1781
1782
1783
1784
1785
1786
1787
1788
1789
1790
1791
1792
Fig. 22. Accessibility analysis report. This automatically generated report circles the inaccessible men's toilet (left pane) and identi®es the relevant section of
the ADAAG code (right pane).
ARTICLE IN PRESS
Advanced Engineering Informatics ± Model 5 ± Ref style 3 ± AUTOPAGINATION 2 05-12-2001 15:05 article wb Alden

UNCORRECTED PROOF
wheelchair's parameters as described in the ADAAG. This
direct performance analysis obviates the need for the
complicated exception analysis associated with the
ADAAG accessible route parameters, an artifact that is a
consequence of the prescriptive nature of the ADAAG.
Furthermore, the performance-based analysis method can
ensure the usability of an accessible route. The ADAAG
prescribes minimal legal requirements. This general
prescription necessarily ignores details of individual wheel-
chair designs and the abilities and preferences of individual
users. Thus, the prescriptive ADAAG can inform the design
of wheelchairs by manufacturers, and it can inform the
design of individual buildings by clients, but it cannot repre-
sent their speci®c situation. The detailed behavior model
C.S. Han et al. / Advanced Engineering Informatics 00 (2002) 000±000 17
1793
1794
1795
1796
1797
1798
1799
1800
1801
1802
1803
1804
1805
1806
1807
1808
1809
1810
1811
1812
1813
1814
1815
1816
1817
1818
1819
1820
1821
1822
1823
1824
1825
1826
1827
1828
1829
1830
1831
1832
1833
1834
1835
1836
1837
1838
1839
1840
1841
1842
1843
1844
1845
1846
1847
1848
1849
1850
1851
1852
1853
1854
1855
1856
1857
1858
1859
1860
1861
1862
1863
1864
1865
1866
1867
1868
1869
1870
1871
1872
1873
1874
1875
1876
1877
1878
1879
1880
1881
1882
1883
1884
1885
1886
1887
1888
1889
1890
1891
1892
1893
1894
1895
1896
1897
1898
1899
1900
1901
1902
1903
1904
Fig. 23. Inaccessible water closet. The photo shows that a wheelchair user is unable to access the men's toilet in the facility diagrammed in Fig. 21 and
referenced in Fig. 22.
ARTICLE IN PRESS
Advanced Engineering Informatics ± Model 5 ± Ref style 3 ± AUTOPAGINATION 2 05-12-2001 15:05 article wb Alden

UNCORRECTED PROOF
and simulation can readily accommodate the behavior
details of different wheelchair designs, and designers can
also use this method to analyze the performance of different
wheelchairs in different building designs while considering
the detailed abilities and preferences of different users.
The development method created a number of speci®c
instances of very general system design components,
including:
² Explicit symbolic (non-numeric) representation of the
physical components of the (building) design and some
component attributes and relationships. The model expli-
citly represents fundamental concepts of the engineering
problem: geometric forms (of both the building and
wheelchairs), the design functional intent (of building
components, i.e. that certain kinds of building compo-
nents are to be wheelchair accessible, and wheelchairs,
i.e. the assumption that motion is always forward and that
turning radii are constrained), and computable behaviors
(of a wheelchair and a building, i.e. paths and wheelchair
accessibility). The simulator model uses this model of the
user and its functional behaviors.
² Both to aid development and understanding of the analy-
sis, the simulation system has an associated graphical
user interface that shows 3D views of the designed
system and time-varying animations of the behavior of
the physical system user, as well as helpful explanations
of the ®ndings of the analysis system.
² Interactive in system use, enabling system users (both
designers and, potentially, code checkers) to interpret
the behavior of any design version and change the
product and process models, exploring predicted perfor-
mance of designs using criteria that are dif®cult to model
explicitly.
The performance-based accessible route analysis uses the
dimension for a wheelchair as given by the ADAAG to
develop the Awc robot parameters. The prescriptive nature
of the code creates an indirect relationship between provi-
sion parameters and the wheelchair dimensions and beha-
vior. In fact, the relationship between the actual wheelchair
constraints and the prescriptive route usability analysis is
not explicitly de®ned. In contrast, the approach described
can model more accurately the desired performance and
usability of space.
A designer can vary the parameters used by the motion
planner that is developed in this paper. Varying speci®c
parameters allows wheelchair manufacturers and users to
test the behavior of a speci®c wheelchair model or assign
personal preferences. Varying the A36 robot's diameter (and
C.S. Han et al. / Advanced Engineering Informatics 00 (2002) 000±00018
1905
1906
1907
1908
1909
1910
1911
1912
1913
1914
1915
1916
1917
1918
1919
1920
1921
1922
1923
1924
1925
1926
1927
1928
1929
1930
1931
1932
1933
1934
1935
1936
1937
1938
1939
1940
1941
1942
1943
1944
1945
1946
1947
1948
1949
1950
1951
1952
1953
1954
1955
1956
1957
1958
1959
1960
1961
1962
1963
1964
1965
1966
1967
1968
1969
1970
1971
1972
1973
1974
1975
1976
1977
1978
1979
1980
1981
1982
1983
1984
1985
1986
1987
1988
1989
1990
1991
1992
1993
1994
1995
1996
1997
1998
1999
2000
2001
2002
2003
2004
2005
2006
2007
2008
2009
2010
2011
2012
2013
2014
2015
2016
Fig. 24. Wheelchair route to men's toilet with the stall partitions removed. Integrated into a design system, the designer can make what-if changes to the design
and invoke the motion-planner to analyze wheelchair accessibility of each design option.
ARTICLE IN PRESS
Advanced Engineering Informatics ± Model 5 ± Ref style 3 ± AUTOPAGINATION 2 05-12-2001 15:05 article wb Alden

UNCORRECTED PROOF
in¯uencing the C36 con®guration space) allows the user to
choose a preferred comfort level for the path width indepen-
dent of the actual wheelchair parameters. Of course, the
diameter should exceed the wheelchair width. Manufac-
turers make wheelchairs with various physical dimensions,
and the performance-based analysis can easily capture these
dimensions to model the Awc robot. In addition, the turning
radii and the centerpoint of the turn depend on the wheel-
chair's mechanical constraints. Finally, independent of
these mechanical constraints, users have their own comfort
level associated with the possible turning radii r1 and r2.
In short, the performance-based approach allows wheel-
chair manufacturers and users to specify custom wheelchair
parameters. Once these parameters are determined, the
motion planner can simulate wheelchair movement through
a space that has been deemed usable by a `model' or
`general-purpose' wheelchair to con®rm the custom wheel-
chair's usability.
This paper has illustrated the use of the performance
prediction method using both small illustrative examples
and a real commercial example. Code specifying bodies
have started to use performance-based methods for some
aspects of building performance, e.g. energy. For example,
the US Department of Energy Building Standards and
Guidelines Program (BSGP) is a software tool that checks
compliance with the commercial building energy code using
whole-building performance simulation methods.
In this work, the non-holonomic path-planning analysis
developed limits the wheelchair motion to three options:
left, right, and forward. The motion planner imposes this
restriction in an attempt to capture the intent of the
prescribed code and match the compliance results of the
ADAAG accessible route provisions. However, the techni-
que can be extended to accommodate a number of options of
forward motion to include various (left or right) and forward
turns. In general, we implemented a simple motion planner:
it demonstrates that the performance-based simulation
approach is interesting and may lead to a change how
designers and code checkers specify and check access
requirements.
The motion planner described in this paper focuses on
forward motion alone. However, the motion planner can
be extended to support backward motion. Reeds [10]
describes optimal paths for a car-like robot that can reverse
its direction. Indeed several ADAAG provisions assume
backward motion. The motion planner would limit the
number of backups for a given path t according to the
speci®cations of the building code or the user.
While this study has illustrated the bene®ts for a perfor-
mance-based analysis of accessible route, further possible
extensions of current works warrant. First, while the motion
planner guarantees the discovery of the 36 in. (915 mm)
wide path if one exists, the non-holonomic planner devel-
oped for the actual wheelchair motion for the second pass
might not ®nd a path even if one exists. The problem
concerns the discretization of the con®guration space.
Determining the necessary discretization granularity for
the non-holonomic con®guration space is not straightfor-
ward since the location of the wheelchair robot's next possi-
ble position (using trigonometric functions) may not
correspond to the exact grid discretization. A promising
alternative is the randomized motion planner for robots
developed under kinematic and dynamic constraints in
which the probability that the planner fails to ®nd a path
when one exists converges toward zero [5].
10. Conclusions
This work is an example of the kind of automated analysis
of the predicted performance of a design that modern auto-
mated simulation now enables. The particular performance
analysis is complicated, highly knowledge-intensive, and
dif®cult both in theory and in practice. There are very
general components to the development method described
in this paper and summarized in the discussion. These
components build on carefully identi®ed and selected and
represented engineering knowledge. The computer imple-
mentation of this model-based simulation provides a new
way to predict the performance of designed systems, one
that appears to be signi®cantly more powerful than either
manual or static heuristic analyses of predicted system beha-
vior. The system components seem general in the sense that
they potentially enable many kinds of high-performance
predictions of system behavior. Although the analysis
system of this paper stores the design model in an applica-
tion-speci®c database, a more general implementation could
store both the design and the user (wheelchair) models in
shared, reusable and potentially changing databases.
10. Uncited references
[1]. [2].
Acknowledgements
This research is supported by the National Science Foun-
dation under Grant No. EIA-9983368 and by the Center for
Integrated Facility Engineering at Stanford University. Any
opinions, ®ndings, and conclusions or recommendations
expressed in this paper are those of the authors and do not
necessarily re¯ect the views of the sponsoring agencies. The
authors would like to thank Mr Joe Cavanaugh for his parti-
cipation in this research and the thoughtful anonymous
reviewers.
References
[1] ADAAG. Americans with disabilities act accessibility guide.
Washington, DC: Access Board, US Architectural and Transportation
Barriers Compliance Board, 1997.
C.S. Han et al. / Advanced Engineering Informatics 00 (2002) 000±000 19
2017
2018
2019
2020
2021
2022
2023
2024
2025
2026
2027
2028
2029
2030
2031
2032
2033
2034
2035
2036
2037
2038
2039
2040
2041
2042
2043
2044
2045
2046
2047
2048
2049
2050
2051
2052
2053
2054
2055
2056
2057
2058
2059
2060
2061
2062
2063
2064
2065
2066
2067
2068
2069
2070
2071
2072
2073
2074
2075
2076
2077
2078
2079
2080
2081
2082
2083
2084
2085
2086
2087
2088
2089
2090
2091
2092
2093
2094
2095
2096
2097
2098
2099
2100
2101
2102
2103
2104
2105
2106
2107
2108
2109
2110
2111
2112
2113
2114
2115
2116
2117
2118
2119
2120
2121
2122
2123
2124
2125
2126
2127
2128
ARTICLE IN PRESS
Advanced Engineering Informatics ± Model 5 ± Ref style 3 ± AUTOPAGINATION 2 05-12-2001 15:06 article wb Alden

UNCORRECTED PROOF
[2] CSC. Energy ef®ciency standards for residential and nonresidential
buildings. Sacramento, CA: California Energy Commission, 1999
title 24, section 6.
[3] Han CS, Kunz JC, Law KH. A client/server framework for on-line
building code checking. J Comput Civil Engng, ASCE 1998;12(4):
181±94.
[4] Han CS. Computer models and methods for a disabled access analysis
design environment. PhD Thesis, Department of Civil and Environ-
mental Engineering, Stanford University, Stanford, CA, 2000.
[5] Hsu D, Kindel R, Latombe JC, Rock S. Randomized kinodynamic
motion planning with moving obstacles. Workshop on Algorithmic
Foundations of Robotics, 2000.
[6] Kiliccote H. A standards processing framework. PhD Thesis, Depart-
ment of Civil and Environmental Engineering, Carnegie Mellon
University, Pittsburgh, PA, 1996.
[7] Latombe JC. Robot motion planning. Norwell, Mass: Kluwer
Academic Publishers, 1991.
[8] Latombe JC. A fast planner for a car-like indoor mobile robot.
Proceedings of the Ninth National Conference on Arti®cial Intelli-
gence, Anaheim, CA, 1991b. p. 659±65.
[9] Partridge D. The scope and limitations of future generation expert
systems. Future Generations Computer Systems 1987;3:1±10.
[10] Reeds JA, Shepp RA. Optimal paths for a car that goes both forward
and backward. Paci®c J Math 1991;145(2):367±93.
C.S. Han et al. / Advanced Engineering Informatics 00 (2002) 000±00020
2129
2130
2131
2132
2133
2134
2135
2136
2137
2138
2139
2140
2141
2142
2143
2144
2145
2146
2147
2148
2149
2150
2151
2152
2153
2154
2155
2156
2157
2158
2159
2160
2161
2162
2163
2164
2165
2166
2167
2168
2169
2170
2171
2172
2173
2174
2175
2176
2177
2178
2179
2180
2181
2182
2183
2184
2185
2186
2187
2188
2189
2190
2191
2192
2193
2194
2195
2196
2197
2198
2199
2200
2201
2202
2203
2204
2205
2206
2207
2208
2209
2210
2211
2212
2213
2214
2215
2216
2217
2218
2219
2220
2221
2222
2223
2224
2225
2226
2227
2228
2229
2230
2231
2232
2233
2234
2235
2236
2237
2238
2239
2240
ARTICLE IN PRESS
Advanced Engineering Informatics ± Model 5 ± Ref style 3 ± AUTOPAGINATION 2 05-12-2001 15:06 article wb Alden