Appunti per le terze classi-2012-13
21
Elenco dei simboli più importanti Elenco dei simboli più importanti SIMBOLO SIGNIFICATO = uguale ≠ diverso (disuguale) ≃ circa uguale < minore > maggiore ≤ minore o uguale ≥ maggiore o uguale ± più o meno ∣ a∣ valore assoluto (modulo) di a: a 2 = ∣a ∣ = { a , se a ≥0 −a , se a 0 Insiemi ∈ appartiene ∉ non appartiene ∃ esiste (ovvero ∃ è il quantificatore esistenziale) ∀ per ogni (ovvero ∀ è il quantificatore universale) Insiemi numerici ℕ Numeri interi positivi o numeri naturali ℤ Numeri interi relativi ℚ Numeri razionali ℝ Numeri reali Operazioni insiemistiche ∪ Unione ∩ Intersezione Relazioni insiemistiche ⊆ È contenuto o è uguale a... (concetto di sottoinsieme) ⊂ È contenuto in ... ⊇ Contiene o è uguale a... (concetto di soprainsieme) ⊃ Contiene... ∅ Insieme vuoto (cioè ∅ è l'insieme che non contiene alcun elemento) Logica ∨ o (inclusivo), vel, or (disgiunzione inclusiva) ∧ e, et, and (congiunzione) ⇒ oppure se…allora… oppure: implica (deduzione) ⇔ se e solo se - 1 -
-
Upload
alessandro-miniati -
Category
Documents
-
view
218 -
download
3
description
Appunti per le terze classi-2012-13
Transcript of Appunti per le terze classi-2012-13

Elenco dei simboli più importanti
Elenco dei simboli più importanti
SIMBOLO SIGNIFICATO= uguale≠ diverso (disuguale)≃ circa uguale< minore> maggiore≤ minore o uguale≥ maggiore o uguale± più o meno
∣a∣ valore assoluto (modulo) di a: a2=∣a∣={ a , se a≥0−a , se a0
Insiemi
∈ appartiene∉ non appartiene∃ esiste (ovvero ∃ è il quantificatore esistenziale)∀ per ogni (ovvero ∀ è il quantificatore universale)
Insiemi numericiℕ Numeri interi positivi o numeri naturaliℤ Numeri interi relativiℚ Numeri razionaliℝ Numeri reali
Operazioni insiemistiche
∪ Unione
∩ Intersezione
Relazioni insiemistiche
⊆ È contenuto o è uguale a... (concetto di sottoinsieme)
⊂ È contenuto in ...
⊇ Contiene o è uguale a... (concetto di soprainsieme)
⊃ Contiene...
∅ Insieme vuoto (cioè∅ è l'insieme che non contiene alcun elemento)
Logica∨ o (inclusivo), vel, or (disgiunzione inclusiva)∧ e, et, and (congiunzione)
⇒ oppure se…allora… oppure: implica (deduzione)⇔ se e solo se
- 1 -

Proprietà delle potenze e alcune formule algebriche più importanti
Proprietà delle potenze e alcune formule algebriche più importanti
Proprietà delle potenze
Siano a∈R ed n∈Z. Ricordiamo, anzitutto, le seguenti definizioni: 1) se n > 1, si chiama potenza ennesima (o n-ma) del numero reale a, il prodotto di n fattori
uguali ad a, cioè:an= a⋅a⋅a⋅. . . . . .⋅a
n volte
2) se n = 1, si pone a1=a ;3) se n = 0 e a ≠ 0, si pone: a0=1 ;
4) se n < 0 e a ≠ 0, si pone: an= 1
a−n.
Dalle definizioni date segue che le proprietà delle potenze a esponente intero dei numeri razionali, valgono anche per le potenze a esponente intero dei numeri reali.Cioè, se a , b∈R ed m , n∈Z , risulta:
a) am⋅an=amn ; d) a⋅b n=an⋅bn ;
b) am :an=am−n ; e) ab n
= an
bn .
c) am n=amn ;
Elenco di alcune formule algebriche più importantiDati a , b e c∈R si può provare facilmente che valgono le seguenti identità:
1. Differenza fra quadrati: a2−b2= a−b ⋅ab
2. Quadrato di un binomio: a±b 2=a2±2a bb2 ;
3. Cubo di un binomio: a±b 3=a3±3 a2 b3ab2±b3
4. Somma e differenza fra cubi: a3±b3=a±b ⋅a2∓abb2 5. Quadrato di un trinomio: abc 2=a2b2c22a b2ac2bc
N.B. Nell'insieme dei numeri reali R la somma di quadrati a2b2 non si può scomporre. Tuttavia, esistono delle formule, utili in determinati casi, che consentono una fattorizzazione particolare di un gruppo di polinomi ed esattamente:
• a2+b2=(a±b )2∓2 a b
• a 4+b4
=(a2±b2)
2∓2 a2b2 e, in generale:
• ∀ n∈N si ha: a2 n+b2n
=(an±bn)
2∓2 anbn
- 2 -

I sistemi di equazioni di primo grado
I sistemi di equazioni di primo grado
Innanzitutto ricordiamo che la forma normale (o canonica) di un sistema in due equazioni di primo grado è la seguente:
{a xb y=ca ' xb' y=c '
dove a, b, c, a', b' e c'∈R e x e y rappresentano le incognite. Tuttavia, se il sistema assegnato non fosse scritto in forma normale, con le operazioni di m.c.m., somme fra monomi simili, semplificazioni ecc..., è sempre possibile riuscire a riscriverlo nella forma algebrica migliore possibile per applicare uno dei metodi risolutivi illustrati nei paragrafi seguenti.
I. Metodo di sostituzioneDopo aver effettuato tutte le operazioni presenti nel sistema e ridotto i monomi simili, si isola un'incognita da una delle due equazioni, ossia si ricava un’incognita in funzione dell’altra se-guendo possibilmente il consiglio di isolare quell'incognita il cui coefficiente numerico è più prossimo ad 1. Poi, se la variabile isolata si trova al membro di sinistra dell'uguaglianza, so-stituiamo l'espressione che è al membro di destra, nella restante equazione che, riducendosi ad una sola variabile, si risolve facilmente.Infine il valore dell’incognita così ottenuto lo sostituiamo nell’equazione in cui l’altra inco-gnita era stata isolata.Esempio svolto:
{3 x−6 4
4 y−7 5
= x410
− y−34
2 x3− y1
2=3 x−1
5−5 y1
12
calcoliamo il m.c.m:
{15 x−6 16 y−7 20
=2 x4 −5 y−3 20
40 x−30 y1 60
=36 x−1 −5 5 y1 60
eliminiamo i denominatori:
{15 x−9016 y−112=2 x8−5 y1520 x−30 y−30=36 x−36−25 y−5
isoliamo le incognite dalle costanti:
{15 x−2 x16 y5 y=9015811240 x−36 x−30 y25 y=−36−530
semplifichiamo e scriviamo il sistema in forma normale:
{13 x21 y=2254 x−5 y=−11
isoliamo x nella seconda equazione:
{13 x21 y=225
x=5 y−114
sostituiamo nella prima equazione
{135 y−114 21 y=225
x=5 y−114
- 3 -

I sistemi di equazioni di primo grado
nella prima equazione abbiamo una sola incognita: risolviamo allora rispetto ad essa:
{65 y−14384 y=900
x=5 y−114
⇒{149 y=1043
x=5 y−114
⇒ {y=1043149
=7
x=5 y−114
infine sostituiamo il valore di y così determinato nella seconda equazione per trovare x:
{y=7
x=5⋅7−114
=244=6
e la soluzione, riscritta in forma ordinata, è:
{x=6y=7
.
II. Metodo di somma o sottrazione o metodo di riduzione
Dopo aver effettuato tutte le operazioni presenti nel sistema, ridotto i monomi simili e posto il sistema nella forma canonica, II.a si individua il minimo comune multiplo dei coefficienti di un’incognitaII.b si trova il fattore che consente di ottenere tale m.c.m. (e il suo opposto) per l’incognita
considerataII.c si sommano algebricamente in colonna le due equazioni: in questo modo scompare
un’incognitaII.d si risolve l’equazione così ottenuta ad una sola incognitaII.e a scelta si può ripetere il procedimento per l’eliminazione dell’altra incognita oppure
effettuare il metodo di sostituzione.Esempio svolto (riprendendo l'esempio del numero I):
{13 x21 y=225, chiamiamo (1 ) la prima equazione4 x−5 y=−11 , chiamiamo (2 ) la seconda equazione
Procediamo cercando di eliminare la x: il m.c.m. tra 13 e 4 è 52, perciò moltiplichiamo la prima equazione per 4 e la seconda per 13 (queste moltiplicazioni sono ammesse in virtù del secondo principio di equivalenza per le equazioni) e poi eseguiremo la sottrazione membro a membro. Conveniamo di indicare questa operazione con la seguente notazione:
4 1 −13 2 dove 1 e 2 indicano, rispettivamente come scritto sopra, la prima e la seconda equazione del sistema e conseguentemente:
{4 13 x21 y =4⋅22513 4 x−5 y =13⋅−11
Per eliminare la y è sufficiente eseguire la sottrazione membro a membro ovvero:
{52 x84 y=90052 x−65 y=−143
⇒ {52 x84 y=90052 x−65 y=−143
__________________________________
52 x−52 x84 y65 y=900143
⇒ 149 y=1043⇒ y=7
In maniera del tutto equivalente, eseguiamo l'operazione:5 1 21 2
allo scopo, stavolta di eliminare la y:
{5 13 x21 y =5⋅22521 4 x−5 y =21⋅−11
⇒ {65 x105 y=112584 x−105 y=−231
__________________________________
65 x84 x105 y−105 y=1125−231
⇒ 149 x=894⇒ x=6
Quindi la soluzione è: {x=6y=7
.
- 4 -

I sistemi di equazioni di primo grado
III. Metodo del confrontoÈ un'applicazione della proprietà transitiva dell'uguaglianza che afferma che se A=B e B=C allora A=C . Infatti, se il sistema è ridotto alla forma normale, isoliamo la
stessa incognita in entrambe le equazioni e, poi (in virtù della proprietà transitiva dell'ugua-glianza), uguagliamo le espressioni situate ai membri di destra.Si ottiene così un’equazione in una sola incognita (per es. x), facilmente risolvibile.Allo scopo di individuare il valore dell'altra incognita (la y), sostituiamo il valore ottenuto (di x) in una delle due equazioni di partenza e così riusciamo ad ottenere la soluzione completa.Esempio svolto (riprendendo ancora l'esempio del numero I):
{13 x21 y=2254 x−5 y=−11
isoliamo x da entrambe le equazioni:
{x=225−21 y13
x=5 y−114
uguagliamo i due membri di destra:225−21 y
13=5 y−11
4⇒ 900−84 y
52=65 y−143
52eliminiamo i due denominatori e risolviamo rispetto ad y:
−65 y−84 y=−900−143⇒−149 y=−1043⇒ y=−1043−149
=7
Adesso, isoliamo y da entrambe le equazioni ed uguagliamo ancora i due membri di destra:
{y=225−13 x21
y=114 x5
⇒225−13 x21
=114 x5
calcoliamo il m.c.m (=110), eliminiamo i due denominatori e risolviamo rispetto ad x :
1125−65 x=23184 x⇒−65 x−84 x=231−1125⇒−149 x=−894⇒ x=−894−149
⇒ x=6
Quindi la soluzione è: {x=6y=7
.
IV. Metodo di Cramer o delle matrici
Consideriamo ancora un sistema ridotto alla forma normale: {a xb y=ca ' xb' y=c '
.
Siano delta, delta x, delta y, rispettivamente, le seguenti espressioni:
=∣a ba' b'∣=a⋅b '−a '⋅b, x=∣c b
c ' b '∣=c⋅b'−c '⋅b e y=∣a ca ' c '∣=a⋅c '−a '⋅c .
Se ≠0 le soluzioni si trovano calcolando:
x=x
e y=
y
Esempio svolto (riprendendo un'ultima volta l'esempio del numero I):
{13 x21 y=2254 x−5 y=−11
- 5 -

I sistemi di equazioni di primo grado
=∣13 214 −5∣=13⋅−5 −4⋅21=−65−84=−149,
x=∣225 21−11 −5 ∣=225⋅−5 11⋅21=−1125231=−894 e
y=∣13 2254 −11 ∣=13⋅−11 −4⋅225=−143−900=−1043
⇒{ x=x
=−894−149
=6
y= y
=−1043−149
=7
- 6 -

Definizione e proprietà dei radicali
Definizione e proprietà dei radicali
Definizione: dati tre elementi a∈R+ e m ,n∈Nsi definisce radicale di indice m e radicando an la po-
tenza anm ed esattamente:
anm =
DEF. =man
Quindi per poter svolgere agevolmente qualunque operazione con i radicali sarà necessario applicare correttamente le proprietà delle potenze. Intanto ricordiamo che:
Se n è numero intero pari Se n è numero intero dispari
na=b significa a=bn
se a, b sono numeri reali positivi o nulli
na=b significa a=bn
se a, b sono numeri reali positivi, negativi o nulli
Esempi: 9=3 ; mentre −9 non esiste ; 327=3 e 3−27= -3 .
Operazioni:Semplificazione: nan=a ; ad esempio
454=5 .n⋅pam⋅p=
nam ; esempio: 14a30=
7a15 ; poiché si semplifica la frazione 3014
=157 .
Somma di radicali: si esegue solo se i radicali sono simili : an xb
n x= ab n x ;Esempio: 2252=72 ; mentre la somma 2352 non si può eseguire utilizzando questa regola.
Prodotto di radicali: si esegue solo se gli indici delle radici sono uguali:n xm⋅
n y p=n x m y p .
Esempio 1: na x⋅mb y=
pa x⋅ p
n b y⋅pn ; dove con p si è indicato il m.c.m.(n, m)
Esempio 2: 325⋅435=
3⋅4 254⋅4⋅ 3 35 3=12 220⋅315 .Quoziente di radicali: si esegue solo se gli indici delle radici sono uguali: n xm :
n y p=n xm: y p .
Esempio 1: na x:mby=
pa x⋅p
n : b y⋅ p
n = p a x⋅ p
n
b y⋅ p
n ; dove con p si è indicato il m.c.m.(n, m)
Esempio 2: 325:
435=3⋅4 25 4 :
4⋅ 3 353=12 220
315.
Trasporto di fattori sotto il segno di radice: anbm=
nbm⋅an ; Es.: 3⋅354=
354⋅ 33 ;
Trasporto di fattori fuori dal segno di radice: nbm⋅an=a
n bm ; Es.: a6⋅b3=a6⋅b21=a3⋅b⋅b
Potenza di radicali: na m= nam ; Esempio: 43 3= 433 .
Radice di radice: m na= m⋅n a ; Esempio:
467=4⋅ 6 7=247 .
Razionalizzazione del denominatore. Esaminiamo tre casi:
1. ab= ab⋅bb= ab
b; 2.
abc
= abc
⋅b−cb−c
= a b−c b−c
;
3. a
nbm= a
nbm⋅
nbn−m
nbn−m= a⋅
nbn−m
nbmn−m=a⋅
nbn−m
nbn=a⋅
nbn−m
b.
Radicali doppi:vale la seguente identità (utile se la quantità (a2 - b) è un quadrato):
a±b= aa2−b2
± a−a2−b2
.
Esempio: 23= 222−32
2− 22−32
= 212 2−1
2= 3
2 1
2.
- 7 -

Formula risolutiva dell'equazione algebrica di secondo grado e fattorizzazione del trinomio di 2°
Formula risolutiva dell'equazione algebrica di secondo grado e fattorizzazione del trinomio di 2°
Un’equazione algebrica di secondo grado (=2°) è un oggetto algebrico che, scritto nella forma completa, si può rappresentare così:
ax 2bxc=0 dove a , b e c∈R e a ≠ 0.Possiamo facilmente provare che le soluzioni possono essere scritte nella seguente forma:
x=−b±b2−4 ac2a
Adesso conveniamo di chiamare il radicando del radicale che compare nella formula risolutiva discriminante dell’equazione di 2° ponendolo, per comodità, uguale a ∆ (si legge: delta) e cioè:
Δ=b2−4 a c .Per classificare le due soluzioni dobbiamo considerare tre casi (in base alle variazioni del segno di ∆):1) ∆ > 0. Allora la è un numero reale e abbiamo due soluzioni x1 , x2 reali e distinte
x1≠x2 2) ∆ = 0. Allora la è uguale a 0 e abbiamo due soluzioni x1 , x2 reali ma coincidenti
x1=x2 3) ∆ < 0. Allora la non è un numero reale e l’equazione completa ax 2bxc=0 non ha
soluzioni reali.
Esempio:risolviamo l’equazione: 2 x 2−9 x−5=0 .
Innanzitutto si ha: {a=2b=−9c=−5
. Applichiamo la formula e otteniamo:
x=−b±b2−4 ac2a
=9±81−4 2 −5 4
==9±1214
=9±114
.
Allora: x1=911
4=20
4=5 e x2==
9−114=−2
4=−1
2.
Troviamo un'applicazione di questa formula nella fattorizzazione a coefficienti reali del trinomio di secondo grado a x2b xc . A questo proposito è facile dimostrare che vale la seguente identità:(1) a x2b xc =
≥0
a x− x1 x−x2 dove x1 e x 2 sono le soluzioni reali dell'equazione algebrica associata al trinomio e cioè le soluzioni
dell'equazione: ax 2bxc=0 .
Esempio:
Consideriamo il trinomio: −12
x2−3 x2 . Troviamo le soluzioni dell'equazione algebrica associata:
−12
x2−3 x2=0⇒ x=3±94−1
=−3±13 . Applicando la formula (1) possiamo quindi
fattorizzare il trinomio e esattamente:
−12
x2−3 x2=−12x−3−13 ⋅x−313 .
- 8 -

Goniometria
Goniometria
Misura degli angoli
Un angolo qualunque si può misurare utilizzando diverse unità di misura. Le unità di misura più utilizzate sono tre:
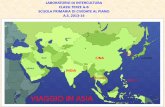
1. gradi sessagesimali. Un grado sessagesimale è la 360-ma parte di un angolo giro.2. gradi centesimali. Un grado centesimale è la 400-ma parte di un angolo giro3. radianti. Un radiante definisce la misura dell'angolo al centro di una circonferenza che insiste
su un arco di misura uguale al raggio della circonferenza stessa. Consideriamo l'angolo r O s disegnato in fig. 1. Supponiamo che in gradi sessagesimali la sua misura sia α ° e che in radianti la misura sempre dello stesso angolo sia x radianti. Dalla evidente proporzione:
α ° :360 ° = x :2 π ,si ottengono le formule di conversione da gradi sessagesimali a radianti e viceversa e cioè:
1. x=α °⋅π180 °
;
2. α °=x⋅180 °
π.
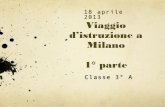
In maniera del tutto analoga si procede per ottenere le formule di conversione da gradi centesimali a radianti (e viceversa) e, infine, da gradi sessagesimali a gradi centesimali (e viceversa).Nel resto di questo capitolo quando faremo riferimento ai gradi sottintenderemo sempre i gradi sessagesimali.In fig. 2 è disegnato un particolare disco goniometrico che descrive un angolo giro. Si può notare l'ampiezza degli angoli espressa in gradi e in radianti con, in particolare evidenza, l'ampiezza degli angoli “più” importanti (meglio: più usati). Inoltre, per gli angoli che appartengono ai quadranti definiti dai numeri romani I, II, III e IV sono indicate le variazioni del segno delle funzioni trigonometriche che saranno introdotte nel seguito di questo capitolo.
Tabella con i valori numerici “più importanti” di sen α , cosα , tanα e cotanα .
Angolo α sen α cosα tanα cotanα
00 ,0 0 1 0 Non esiste
300 , π6
12
√32
√3
450 , π4
√22 1 1
600 , π3
√32
900 , π2 1 0 Non esiste 0
1200 , 23
π −12 −√3
- 9 -
fig. 1
s
O r
α°, x
√33
√22
12
√33
√3
−√33
√32

Goniometria
1350 , 34
π √22
−√22
−1 −1
1500 , 56π −
√32
−√33 −√3
1800 , 2π 0 0 Non esiste
- 10 -
fig. 2
−1
12

Formule più importanti di trigonometria
Formule più importanti di trigonometria
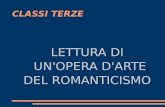
È assegnato un triangolo rettangolo ABCΔ
disegnato in fig. 1:
fig. 1Le funzioni trigonometriche dell'angolo x sono definite così:
1. sen x=ac=
cateto oppostoipotenusa
2. cos x=bc=
cateto adiacenteipotenusa
3. tanx=sen xcos x
=ab=
cateto oppostocateto adiacente
4. cotan x= cos xsen x
=ba=cateto adiacente
cateto opposto
5. sec x= 1cos x
= cb= ipotenusa
cateto adiacente
6. cosec x= 1sen x
= ca= ipotenusa
cateto oppostoRelazione fondamentale:
7. ∀ x∈R si può dimostrare che vale la seguente identità: sen2 xcos2 x=1
da cui: sen x=±1−cos2 x e cos x=±1−sen2 xFormule di addizione e sottrazione:
8. Qualunque siano i due numeri α e β∈R valgono le seguenti identità:sen α±β =senα⋅cosβ±senβ⋅cosαcos α±β =cosα⋅cos β∓senα⋅senβ
tan α±β = tan α±tanβ1∓tanα⋅tanβ
Formule di bisezione:9. Qualunque sia α∈R valgono le seguenti identità:
senα2=± 1−cos α
2, cos
α2=± 1cos α
2Relazioni tra gli elementi di un triangolo qualsiasiI due seguenti teoremi si utilizzano quando di un triangolo qualsiasi dobbiamo determinare lati e angoli. Per i due teoremi che seguono facciamo riferimento alla fig. 2
A
B
αb
a
c
β γC
fig. 2Teorema dei seni (o di Eulero)Enunciato:in un triangolo qualsiasi le misure dei lati sono proporzionali ai seni degli angoli opposti e cioè, facendo riferimento alla fig. 2, si ha:
- 11 -
A C
B
xb
ac

Formule più importanti di trigonometria
asen α
= bsenβ
= csen γ
Esempi di applicazione del teorema dei seni:
1) α=30 ° , β=45 ° , a=16u.⇒ sen 30 °16u .
= sen 45 °b
⇒b=16u.⋅22⋅12≈22.62u. ;
2) α=40 ° , b=15u. , a=25u.⇒ sen40 °25u.
= senβ15u.
⇒ senβ≈0.38 .
Teorema del coseno (o di Carnot)Enunciato:in un triangolo qualsiasi, il quadrato della misura di ogni lato è uguale alla somma dei quadrati delle misure degli altri due lati, diminuita del doppio prodotto delle misure di questi due lati per il coseno dell’angolo fra essi compreso e cioè, facendo ancora riferimento alla fig. 2, si ha:
1. a2=b2c2−2 b⋅c⋅cos α2. b2=a2c2−2a⋅c⋅cos β3. c2=a2b2−2 a⋅b⋅cos γ
Esempio di applicazione del teorema del coseno
γ=60° , a=5u., b=8u.⇒c2=a2b2−2abcos 60°=25u264u2−2⋅5u⋅8u⋅12=49u2;
per cui:
c=7u. , a=5u. , b=6u.⇒ dal teorema precedente si ha:a
senα= c
sen γ⇒ sen α
a=sen γ
c⇒ senα=a⋅sen γ
c⇒
senα=5u.⋅3
27u.
= 5143≃0. 61⇒α≃37 ° ,59 .
- 12 -

Formule riguardanti la retta e alcune coniche in un piano cartesiano
Formule riguardanti la retta e alcune coniche in un piano cartesiano
Nel seguito useremo queste notazioni: P0≡ x0 , y0 , P1≡ x1 , y1 e P2≡ x2 , y2 per indicare i punti P0, P1 e P2
1. Formula della distanza fra due punti: P1P2= x2−x1 2 y2− y1
2
2. Punto medio M del segmento di estremi i punti P1 e P2: M≡ x1 x2
2,
y1 y2
2
3. Equazione della retta r passante per due punti distinti: r :x−x1
x2−x1
=y− y1
y2− y1
3a) se x1= x2⇒ la retta è parallela all'asse y e ha equazione: x=cost. 3b) se y1= y2⇒ la retta è parallela all'asse x e ha equazione: y=cost.
3c) il coefficiente angolare si indica con m e si pone: m=y2− y1
x 2−x1
=tanα e
α=arctan m =tan−1 m Oss: La dimostrazione è a questa pagina.
4. Equazione della retta r in forma esplicita: r : y=mxp
5. Equazione della retta r in forma implicita: r : axbyc=0
6. Equazione del fascio di rette passanti per il punto P0: y− y0=m x− x0 7. Per disegnare il grafico di una retta è necessario determinare esattamente due punti
appartenenti alla retta stessa: se la retta è scritta in forma esplicita y=mx p allora conviene determinare le coordinate di questi punti assegnando prima il valore 0 alla x, calcolare il corrispondente valore di y e poi il valore 1 e poi calcolare il corrispondente valore di y come descritto nella seguente tabella:
x y
0 p
1 m+p
Se la retta è assegnata in forma implicita, e cioè, axbyc=0 allora, per determinare i due punti, è sufficiente assegnare prima alla x il valore 0, calcolare il corrispondente valore di y e poi il valore 0 ad y e poi calcolare il corrispondente valore di x come descritto nella seguente tabella:
x y
0 − cb
− ca
0
Qualora nell'equazione implicita il termine noto fosse 0 ad es. r : y=x , allora basterà eseguire una variazione nei valori scelti come illustrato dalla seguente tabella:
x y
0 0
1 −ab
Nel seguito faremo riferimento alle rette r e s di equazioni: r : y=mr x pr e s : y=m s xps
- 13 -
Formule riguardanti la retta e alcune coniche in un piano cartesiano
8. Condizione di parallelismo fra rette: due rette, r e s, sono parallele e si scriverà r//s se i loro coefficienti angolari sono uguali ovvero se:
mr=ms
9. Condizione di perpendicolarità fra rette: due rette, r e s, sono perpendicolari e si scriverà
r ┴ s se il prodotto dei loro coefficienti angolari è −1 ovvero se:mr⋅m s=−1
10. Il punto d'intersezione P fra due rette non parallele r e s :
P=r∩s={y=mr x pr
y=ms x ps
11. Formula della distanza fra un punto P0e una retta di equazione implicita r : axbyc=0
d=∣a x0b y0c∣a2b2
Oss.La dimostrazione è a questa pagina.
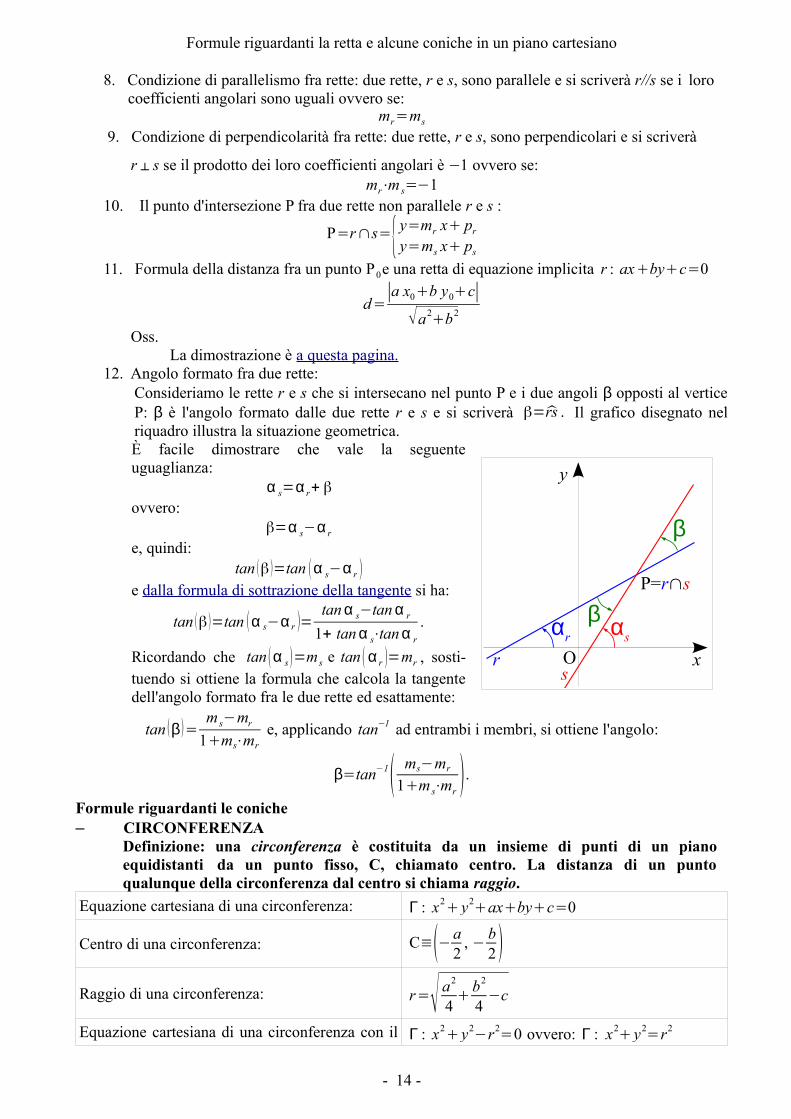
12. Angolo formato fra due rette:Consideriamo le rette r e s che si intersecano nel punto P e i due angoli β opposti al vertice P: β è l'angolo formato dalle due rette r e s e si scriverà β=rs . Il grafico disegnato nel riquadro illustra la situazione geometrica.È facile dimostrare che vale la seguente uguaglianza:
α s=αr+ β
ovvero:β=α s−αr
e, quindi:tan (β )=tan (α s−αr )
e dalla formula di sottrazione della tangente si ha:
tan (β )=tan (α s−αr )=tan α s−tan α r
1+ tan α s⋅tan α r
.
Ricordando che tan (α s )=m s e tan ( αr )=mr , sosti-tuendo si ottiene la formula che calcola la tangente dell'angolo formato fra le due rette ed esattamente:
tan β = m s−mr
1ms⋅mr
e, applicando tan−1 ad entrambi i membri, si ottiene l'angolo:
β=tan−1 ms−mr
1m s⋅mr.
Formule riguardanti le coniche– CIRCONFERENZA
Definizione: una circonferenza è costituita da un insieme di punti di un piano equidistanti da un punto fisso, C, chiamato centro. La distanza di un punto qualunque della circonferenza dal centro si chiama raggio.
Equazione cartesiana di una circonferenza: Γ : x2 y2axbyc=0
Centro di una circonferenza: C≡−a2
, − b2
Raggio di una circonferenza: r= a2
4b2
4−c
Equazione cartesiana di una circonferenza con il Γ : x2 y2−r2=0 ovvero: Γ : x2 y2=r2
- 14 -
r O x
y
s
αr αs
β
β
P=r∩s
Formule riguardanti la retta e alcune coniche in un piano cartesiano
centro nell'origine e raggio r:
Equazione cartesiana di una circonferenza con il
centro sull'asse x e cioè nel punto C≡−a2
, 0: Γ : x2 y2axc=0
Equazione cartesiana di una circonferenza con il
centro sull'asse y e cioè nel punto C≡0 , −b2 : Γ : x2 y2byc=0
– PARABOLADefinizione: una parabola è costituita da un insieme di punti di un piano equidistanti da un punto fisso, F, chiamato fuoco e da una retta, d, chiamata direttrice.
Equazione cartesiana di una parabola che ha l'asse di simmetria // all'asse y: P: y=a x2b xc
Coordinate del Vertice: V≡− b2 a
, −b2−4 a c4a ≡− b
2 a, −
4 a
ricordando che: =b2−4 ac
Coordinate del Fuoco: F≡− b2a
, 1−4a
Equazione cartesiana della retta direttrice: d : y=−14a
Equazione cartesiana dell'asse di simmetria: x=− b2a
Equazione cartesiana di una parabola che ha l'asse di simmetria // all'asse x: P: x=a y2b yc
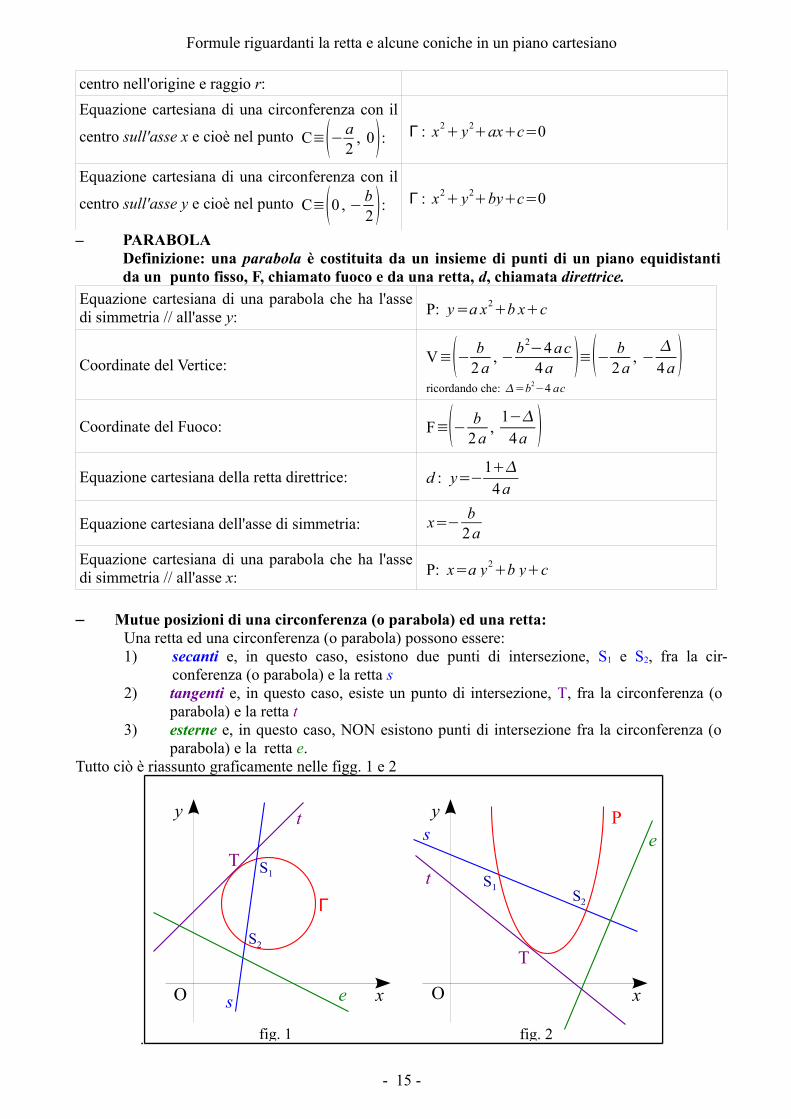
– Mutue posizioni di una circonferenza (o parabola) ed una retta:Una retta ed una circonferenza (o parabola) possono essere:1) secanti e, in questo caso, esistono due punti di intersezione, S1 e S2, fra la cir-
conferenza (o parabola) e la retta s2) tangenti e, in questo caso, esiste un punto di intersezione, T, fra la circonferenza (o
parabola) e la retta t3) esterne e, in questo caso, NON esistono punti di intersezione fra la circonferenza (o
parabola) e la retta e.Tutto ciò è riassunto graficamente nelle figg. 1 e 2
.
t
O x
y
s e
T S1
S2
Γt
O x
ys e
T
S1S2
P
fig. 1 fig. 2
- 15 -

Formule riguardanti la retta e alcune coniche in un piano cartesiano
Per determinare analiticamente la posizione di una circonferenza rispetto ad una retta r qualunque, occorre risolvere un sistema di 2° costituito dall'equazione della circonferenza e l'equazione della retta e poi studiare il discriminante dell'equazione risolvente il sistema e cioè:
{x2 y 2a xb yc=0y=m x p
⇒ {x2 m xp 2a xb m xp c=0y=m x p
⇒
{x2m2 x22 m p x p2a xbm xb pc=0y=m x p
⇒{1m2 x2 2m pb ma x p2b pc=0y=m xp
L'equazione: 1m2 x22m pb ma x p2b pc=0 è chiamata equazione risolvente il sistema e, come scritto sopra, ne dobbiamo studiare il discriminante. Ponendo:α=1m2 , β=2m pbma e γ=p2b pc , l'equazione si trasforma ed assume la seguente semplice (e nota) forma: α x 2β xγ=0 il cui discriminante è: =β2−4α⋅γ . Possono capitare tre casi (a seconda del segno di ) ed esattamente:
– ∆ > 0. Allora esistono due intersezioni x1 , x2 distinte x1≠x2 e la retta è secante e i punti
di intersezione sono: S1≡ x1 , m x1p e S2≡ x2, m x2 p – ∆ = 0. Allora esistono due intersezioni x1 , x2 coincidenti x1=x2 e la retta è tangente e il
punto di tangenza è: T≡ x1 , m x1 p – ∆ < 0. Allora NON esistono intersezioni reali e la retta è esterna.
Nel caso della parabola si procede in maniera del tutto analoga.
- 16 -

Dimostrazione della formula della distanza punto-retta
Dimostrazione della formula della distanza punto-retta
Siano assegnati una retta r:axbyc=0 ed un punto P0 esterno ad r cioè P0≡ x0, y0 ∉r.
Facendo riferimento alla fig. 1, ricordiamo che la distanza fra un punto ed una retta è rappresentata dal segmento di minima lunghezza che possiamo tracciare per congiungere il punto e la retta in questione. In base a ciò, il segmento, che ha origine in P0 dovrà essere ortogonale alla retta r. Sia H il piede della perpendicolare tracciata da P0.
fig. 1
Detto ciò, vogliamo dimostrare che la distanza d=HP0 è definita dalla seguente formula:
d=∣ax0by0c∣
a2b2
Dim. Sapendo che la retta r è assegnata in forma implicita (qualora fosse assegnata in forma esplicita sappiamo che è sempre possibile esprimerla in forma implicita con semplici passaggi algebrici), possiamo determinarne il coefficiente angolare:
mr=−ab
e, dovendo essere HP0⊥ r , possiamo calcolare il coefficiente angolare della retta HP0 e cioè:
mr⊥=b
a.
Scriviamo l'equazione della retta HP0 che ha per coefficiente angolare ba
:
HP0 : y− y0=ba x−x0
e, calcolando il m.c.m. ed eliminando il denominatore se a≠0 , si ha:HP0 : a y− y0 =b x− x0 .
Adesso, allo scopo di determinare le coordinate del punto d'intersezione H fra la retta HP0e la retta r, impostiamo e risolviamo il sistema:
{axbyc=0a y− y0 =b x−x0
⇒{x=−byca
a y− y0 =b x− x0 ⇒{x=−byc
a
b −byca−x0−a y− y0 =0
⇒
{x=−byca
−b2 y−bc−abx0−a2 ya2 y0=0⇒{x=−byc
a− y a2b2 =bcabx0−a2 y0
⇒ {x=−byca
y a2b2 =a2 y0−abx0−bc
⇒
- 17 -
rO x
y
O
Hd
P0≡ x0, y0

Dimostrazione della formula della distanza punto-retta
{x=−byca
y H=a2 y0−abx0−bc
a2b2y H è l'ordinata di H
⇒{x=−ba2 y0−abx0−bc
a2b2c
a
y H=a2 y0−abx0−bc
a2b2
⇒ {axba2 y0−abx0−bc
a2b2c=0
y H=a2 y0−abx0−bc
a2b2
⇒
{a3 xa b2 xa2b y0−a b2 x0−b2 ca2cb2 c=0
y H=a2 y0−abx0−bc
a2b2⇒{a3 xab2 xa2b y0−ab2 x0a2 c=0
y H=a2 y0−abx0−bc
a2b2⇒
{a2 xb2 xa b y0−b2 x0a c=0
y H=a2 y0−abx0−bc
a2b2⇒{x H=
b2 x0−ab y0−a c
a2b2xH è l'ascissa di H
y H=a2 y0−abx0−bc
a2b2
⇒
H≡ b2 x0−ab y0−a c
a2b2,
a2 y0−abx0−bc
a2b2 .Adesso, utilizzando la formula della distanza fra due punti, troviamo d=HP0 .
d=HP0=√(x0−b2 x0−a b y0−a c
a2+b2 )2
+( y0−a2 y0−abx0−bc
a2+b2 )2
=
=√((a2+b2) x0−b2 x0+a b y0+a c
a2+b2 )2
+((a2+b2) y0−a2 y0+abx0+bc
a2+b2 )2
=
=√( 1
a2+b2 )2
(( (a2+b2) x0−b2 x0+a b y0+a c )2+ ( (a2+b2) y0−a2 y0+abx0+bc )
2
)=
=√( 1
a2+b2 )2
((a2 x0+b2 x0−b2 x0+a b y0+a c )2+ (a2 y0+b2 y0−a2 y0+abx0+bc )
2)=
=√( 1
a2+b2 )2
((a2 x0+a b y0+a c )2+ (b2 y0+abx0+bc )
2) =
=√( 1
a2+b2 )2
(a4 x02+a2b2 y0
2+a2 c2+2a3 b x0 y0+2a3 c x0+2 a2b c y0+b4 y0
2+a2b2 x0
2+b2 c2+
+2a b3 x0 y0+2b3c y0+2a b2c x0)
=
=√( 1
a2+b2 )2
(a2 x02 (a2+b2 )+b2 y0
2 (a2+b2)+2 a b x0 y0 (a2+b2)+2 a c x0 (a2+b2)+2b c y0 (a2+b2)+
+c2 (a2+b2) )
= √( 1
a2+b2)2
(a2+b2) (a2 x02+b2 y0
2+2 a b x0 y0+2a c x0+2b c y0+c2 )=
=√( a2+1
b2
(a2+b2)21 )(a2 x0
2+b2 y0
2+c2+2 a b x0 y0+2a c x0+2b c y0 )⏟
Questa espressione è il quadrato di: a x0+b y0+c
= √ (a x0+b y0+c )2
a2+b2=√ (a x0+b y0+c )
2
√a2+b2=
=∣a x0+b y0+c∣
√a2+b2 c.v.d.
- 18 -

Dimostrazione dell'equazione cartesiana di una retta
Dimostrazione dell'equazione cartesiana di una retta
Siano assegnati due punti distinti P1≡ x1 , y1 e P2≡ x2 , y2 con il segmento P1P2non parallelo né
all'asse x né all'asse y. Per un postulato di geometria elementare sappiamo che, per due punti distinti, passa una e una sola retta P1P2. Basandoci su questo postulato, vogliamo determinare l'equazione cartesiana della retta r che, in piano cartesiano ortogonale e monometrico Oxy, passa per i due punti distinti P1 e P2 .
fig. 1Dim. Consideriamo la fig. 1. Supponiamo, senza perdere nulla in generalità, che anche P∈r. P è un qualunque altro punto appartenente alla retta r e quindi le sue coordinate saranno generiche e incognite: P≡ x , y . Partendo dai punti P1≡ x1 , y1 , P2≡ x2 , y2 e P≡ x , y tracciamo le proie-zioni ortogonali P1H1 , P2H2, P H (rispetto all'asse x ) e P1K1 , P2K2 , P K (rispetto all'asse y ). Per la perpendicolarità, conosciamo le misure dei seguenti segmenti:
(*) HH1= x−x1, H2H1= x2− x1 , KK1= y− y1 , K2K1= y2− y1.
Inoltre, i due trapezi rettangoli H1H2P2P1 e H1H P P1 sono simili tra loro poiché hanno lo stesso numero di lati e gli angoli corrispondenti congruenti e quindi vale questa relazione:
(1)HH1
H 2H1
=PP1P2P1
,
e, per lo stesso motivo, i due trapezi rettangoli K1P1P K e K1P1P2K 2 sono simili tra loro cosicché vale questa relazione:
(2)KK1
K 2K1
=PP1P2P1
.
Confrontando la (1) con la (2) si ha:
(3)HH1
H 2H1
=KK1
K 2K1
e, sostituendo le misure definite dalle uguaglianze (*), si ottiene:
(4) r: x−x1x2− x1
=y− y1y2− y1
.
Quest'ultima uguaglianza si chiama: equazione cartesiana di una retta r passante per due punti distinti P1P2.Oss.A) Se x1= x2 , allora la retta P1P2 è verticale. In questo caso, l'equazione (4) perde di significato
poiché un suo denominatore vale 0. È tuttavia naturale, in questo caso, utilizzare l'equazione:
- 19 -
r O x
y
O
P
P1
P2
B
H
C
A
H1 H2H2
K1
H1
K 2
K

Dimostrazione dell'equazione cartesiana di una retta
x = costante o, più sinteticamente: x=cost o, meglio ancora: r: x=k.B) Se y1= y2, allora la retta P1P2 è orizzontale. Come prima, l'equazione (4) perde di significato
poiché un suo denominatore vale 0. È tuttavia naturale, in questo caso, utilizzare l'equazione: y = costante o, più sinteticamente: y=cost o, meglio ancora: r: y=k.
C) Se x1≠x2 e y1≠ y2 allora, con semplici passaggi algebrici, possiamo riscrivere l'equazione (4) nella forma implicita e cioè:
(5) r:axbyc=0e, ancora, isolando la variabile y, possiamo riscrivere l'equazione (4) nella forma esplicita e cioè:
(6) r:y=mxp
- 20 -

Indice
Indice
Indice generaleElenco dei simboli più importanti...........................................................................................................1Proprietà delle potenze e alcune formule algebriche più importanti.......................................................2I sistemi di equazioni di primo grado......................................................................................................3Definizione e proprietà dei radicali.........................................................................................................7Formula risolutiva dell'equazione algebrica di secondo grado e fattorizzazione del trinomio di 2°.......8Goniometria.............................................................................................................................................9
Misura degli angoli.............................................................................................................................9Formule più importanti di trigonometria...............................................................................................11Formule riguardanti la retta e alcune coniche in un piano cartesiano...................................................13Dimostrazione della formula della distanza punto-retta........................................................................17Dimostrazione dell'equazione cartesiana di una retta............................................................................19Indice.....................................................................................................................................................21
- 21 -