Applying Optimal Search Theory to Inland SAR: Steve ... Search paper MORS June 2009.pdf-1- Applying...
16
-1- Applying Optimal Search Theory to Inland SAR: Steve Fossett Case Study Colleen M. Keller Metron, Inc. 512 Via de la Valle Suite 301 Solana Beach, CA 92075 77 th MORS Symposium Composite Group D & 21 1 May 2009 Steve Fossett, a famous adventurer, disappeared on 3 September 2007 in a remote area of Nevada during a solo pleasure flight in a small aircraft. An intense search conducted by both private parties and multiple government agencies was eventually suspended with negative results. Fossett’s wreck was discovered in the eastern Sierra Nevada mountains by a hiker almost one year later. This paper describes an independent effort to direct search efforts using probabilistic search theory and optimization techniques. Background The modern commercial aviation system relies upon an extensive radar network to provide Air Traffic Control (ATC) services. It is thus difficult to fathom that an aircraft could virtually disappear within the boundaries of the continental United States, and that an exhaustive search conducted by multiple agencies over a 30-day period could turn up no hard evidence, no crash sites, and no viable leads. This scenario is precisely what happened in September 2007 when a Bellanca Super Decathalon flown by Steve Fossett failed to return to a private airstrip after a Labor Day morning flight over the mountains and dry lake beds of California and Nevada, southeast of Lake Tahoe. In fact, rumors surrounding the circumstances of Fossett’s disappearance were commonplace as the search progressed without results. There were theories that Fossett had been abducted by aliens due to the proximity of U.S. Air Force (USAF) “secret” test ranges north of Las Vegas; others proposed elaborate conspiracy theories involving the governments of foreign countries and insurance fraud. Fossett’s notoriety and wealth complicated matters, as did the fact that an online community of computer users was enlisted to search for the wreck through the Amazon Mechanical Turk/Google Earth website [1]. Attention even focused on two large lakes in the area; many surmised that since Fossett’s wreck was not found on land, it must be hidden from sight under water. Sonar searches of nearby Walker Lake were initiated but were never fully completed.
Transcript of Applying Optimal Search Theory to Inland SAR: Steve ... Search paper MORS June 2009.pdf-1- Applying...

-1-
Applying Optimal Search Theory to Inland SAR:
Steve Fossett Case Study
Colleen M. Keller
Metron, Inc. 512 Via de la Valle
Suite 301 Solana Beach, CA 92075
77th MORS Symposium
Composite Group D & 21 1 May 2009
Steve Fossett, a famous adventurer, disappeared on 3 September 2007 in a remote area of Nevada during a solo pleasure flight in a small aircraft. An intense search conducted by both private parties and multiple government agencies was eventually suspended with negative results. Fossett’s wreck was discovered in the eastern Sierra Nevada mountains by a hiker almost one year later. This paper describes an independent effort to direct search efforts using probabilistic search theory and optimization techniques.
Background The modern commercial aviation system relies upon an extensive radar network to provide Air Traffic Control (ATC) services. It is thus difficult to fathom that an aircraft could virtually disappear within the boundaries of the continental United States, and that an exhaustive search conducted by multiple agencies over a 30-day period could turn up no hard evidence, no crash sites, and no viable leads. This scenario is precisely what happened in September 2007 when a Bellanca Super Decathalon flown by Steve Fossett failed to return to a private airstrip after a Labor Day morning flight over the mountains and dry lake beds of California and Nevada, southeast of Lake Tahoe. In fact, rumors surrounding the circumstances of Fossett’s disappearance were commonplace as the search progressed without results. There were theories that Fossett had been abducted by aliens due to the proximity of U.S. Air Force (USAF) “secret” test ranges north of Las Vegas; others proposed elaborate conspiracy theories involving the governments of foreign countries and insurance fraud. Fossett’s notoriety and wealth complicated matters, as did the fact that an online community of computer users was enlisted to search for the wreck through the Amazon Mechanical Turk/Google Earth website [1]. Attention even focused on two large lakes in the area; many surmised that since Fossett’s wreck was not found on land, it must be hidden from sight under water. Sonar searches of nearby Walker Lake were initiated but were never fully completed.

-2-
On 1 October 2008, almost a year to the day that the search was suspended by officials, a hiker stumbled across personal items (money, identification, and a jacket) seven miles west of Mammoth Lakes, CA, suggesting that Fossett’s crash site was nearby. A focused air search quickly located debris on a steep hillside at 10,000 feet altitude. Within 24 hours the news broke that Fossett’s wreck had been found and verified. The discovery laid to rest speculation about Fossett’s fate, but raised many questions about the effectiveness of inland Search and Rescue (SAR) techniques and the reasons for the crash. Fossett was an experienced pilot and a survivor of numerous close calls during his 50-odd years spent chasing increasingly ambitious goals. His record-setting adventures included cross-oceanic sailing, round-the-world ballooning, high altitude glider records, the Ironman triathlon, summiting the world’s highest mountain peaks, finishing the Alaska Iditarod dogsled race, swimming the English Channel, and the first solo nonstop round-the-world flight in an airplane. At the time he went missing, Fossett was planning to set an absolute world altitude record in rotorcraft, and was deep into a project to break the absolute land speed record in October 2007. Those that knew him expected him to appear after a few days, hiking out from a crash site dusty and tired but very much alive. The search for Steve Fossett has been labeled the most extensive SAR effort ever undertaken on U.S. soil. This claim is possibly true if all the various efforts are included, but the U.S. government’s official search effort was equal to any other search for a missing citizen. Since the accident could have occurred in either Nevada or California, both states stood up an Incident Command (IC) and enlisted their own branches of the Civil Air Patrol (CAP) and Air National Guard (ANG) units to conduct the search. The Air Force Rescue Coordination Center (AFRCC) at Tyndall AFB served as the overall coordinating unit, a role it fills countless times each year when persons are reported missing overland. USAF AFRCC personnel fielded tips over a toll-free phone line and tracked each piece of intelligence from first report to follow-up, pushing information to the field operations and collecting summary situation reports at the end of each day. CAP aircraft operating out of Minden, NV and Bishop, CA began searching by 4 September and continued through the end of the month. In all, the NV CAP flew 245 sorties and CA CAP flew 288 before the missions were suspended [2]. The estimated cost to the government was $1.4M [3]. The search for Steve Fossett is correctly labeled as an extraordinary effort because the government’s efforts were augmented by an incredible set of assets brought forth by Fossett’s friends and family. The Fossett family provided funds for a contract fleet of high-altitude SAR helicopters and trained observers. These assets flew over 287 sorties out of the Flying ~M~ Ranch, the origin of Fossett’s doomed flight. The owner of the Flying ~M~ Ranch also provided significant funds to the state of Nevada to aid in their search. Another 70+ fixed-wing sorties were flown by friends who volunteered to help. The private “Friends of Fossett” (FF) search effort conducted a military-like operation, overseen by experienced SAR personnel who imposed crew rest limitations and formal briefings/debriefings, and demanded full documentation of flights including flight path

-3-
data downloaded from specially-purchased GPS units. Search grid assignments were coordinated with both California and Nevada CAP units on a daily basis for safety and deconfliction. It is a credit to this professionalism that there were no accidents during the chaotic first few weeks when aircraft from the three separate efforts filled the sky in a 150- by 100-nmi search area. Search efforts initially focused on several reports of Fossett’s intended flight path, and subsequent tips received from possible sightings. Since the flight was likely conducted at low altitude in areas of poor radar coverage and possibly without an activated transponder (which would enhance tracking in a radar environment), there were practically no data to document it. The aircraft had an endurance of roughly four hours with full fuel and could travel at a top speed of 110 kts; this set the generalized search area in excess of 150,000 nmi2, assuming Fossett intended to land back at the Flying ~M~. Given an estimated takeoff time of 8:25AM and an approximate “on-deck” return time of 1100AM, this area could be further trimmed to a 128 nmi radius, or approximately 51,000 nmi2. Populated areas near Reno, restricted airspace associated with the Fallon Naval Air Station and Nellis Air Force Base, and the highest peaks in the Sierra Nevada Mountains were eliminated due to the low likelihood that Fossett would have flown there unobserved. The resulting area still encompassed over 25,000 nmi2 of relatively uninhabited desert, mountains, and rugged terrain.
Analytical Approach to Scenario Development Metron began working with the FF search team several months after the official search ended. The focus, at that time, had changed from active search to collating data and organizing for a renewed search effort scheduled for the following spring. The team had amassed a large amount of data including reported sightings, taped interviews, search aircraft GPS tracks, GIS analyses of terrain and vegetation, sortie records, photos of potential crash sites, and timeline analyses. What was needed was a way to make sense of the disparate pieces of information, understand what had been accomplished to date, and to rigorously plan for follow-on efforts. Metron brought to the table a wealth of experience in search planning operations [4,5]. Most recently, this expertise had been formalized in the search planning and assessment algorithms contained in the Search and Rescue Optimal Planning System (SAROPS), a computer-based tool used by the U.S. Coast Guard (USCG) to plan searches for persons and vessels missing at sea [6]. SAROPS simulates target motion in weighted scenarios, accounting for potential “hazard areas” where an incident might be more likely to occur, and produces probability maps of likely target sites. It has been successfully employed over water to help direct USCG searches for ship wrecks and floating survivors [7]. Several modifications to the software and the data were made to accommodate the overland problem. The SAROPS output would produce recommendations of the highest-payoff areas for future search efforts. The first task was to gather, reconcile, and analyze all the information available, assign probabilities to each piece of data, and reconstruct scenarios describing the possible flight

-4-
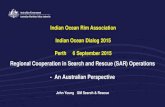
path of Fossett’s aircraft. This effort took several months but was by far the most critical step in the entire process. Data consisted of reported sightings (of various degrees of credibility), candidate radar tracks (obtained from USAF analysts), knowledge of Fossett’s intent for the flight, the capabilities and limitations of the aircraft, reported weather conditions, and terrain in the local area. Attention quickly focused on two key last known points (LKPs). The first was a sighting in Nevada in the Mud Flats area 14 miles south of the Flying ~M~, by a ranch hand that was familiar with the aircraft. The second was a radar track, identified by USAF analysts traversing eastbound from Mud Flats through Powell Canyon in the Wassuk mountains and into the Hawthorne Valley (see figure 1). The Powell Canyon radar track was particularly appealing because a hunter in Hawthorne Valley reported seeing an aircraft, similar to Fossett’s, following the radar track’s flight path out of the mountains that morning. Radar tracks can provide excellent location, speed, altitude, and time data, but unless the aircraft is squawking an assigned transponder code, they are normally anonymous. The association of a visual sighting to the Powell Canyon track was particularly convincing.
Figure 1. Last Known Points (LKP) used in Fossett scenario development Somewhat puzzling was the fact that these two key locating data appeared to be mutually exclusive. The Mud Flats sighting was estimated to have occurred around 11:00AM (the actual time was not recorded); the Powell Canyon radar track leaves the area of Mud Flats and enters the canyon at 9:53AM. Although it was possible to join the two pieces of information together, it was highly unlikely that they were the same aircraft because backtracking was considered unlikely. Our approach allowed us to keep both pieces of information as two separate scenario possibilities, each with an assigned weight.
Northbound LKP
Southbound LKP
Mud Springs LKP

-5-
Furthermore, although the radar track showed the unknown aircraft circling to the south, then turning northbound and flying almost directly overhead the hunter, he did not report seeing the aircraft again after it departed to the south. Radar coverage at the aircraft’s altitude is spotty in the Hawthorne Valley, and there are two significant breaks in the track. A real possibility existed that the track was actually two aircraft, one headed southbound after exiting the canyon and another coming up from the south and continuing toward Hawthorne. Although radar analysts searched for evidence of other aircraft in the area and insisted that the track entirely belonged to a single target, the possibility of two aircraft could not be ruled out. Separate scenarios honored these theories. A third reported sighting 27 nmi east of the eastern exit of Powell Canyon in Sodaville, NV was also strongly considered. However, this sighting was estimated to occur near noon, making it impossible for Fossett to return to the Flying ~M~ by 11:00AM. While this scenario was considered in the analysis, it was assigned a low probability. It should be noted that none of these scenarios included the actual crash site in the Sierras 50 nmi southwest. The main reason is there were no credible sightings or radar data to justify a scenario for this area. Fossett’s aircraft initially headed west to the mountains, but the trail went cold over the Virginia Lakes area on the northwest corner of Mono Lake. Our scenarios assumed he had left the mountains and returned to the vicinity of the Flying ~M~, intending to land in time for lunch. At no time did we consider points south of Virginia Lakes, although these areas were included in the original search effort. In retrospect, we should have placed greater emphasis on this area. Fossett told Hilton’s chief pilot that he intended to “fly south along [Highway] 395” [8]. We now know that he reached Highway 395 in the Virginia Lakes area and flew southbound paralleling it, but west along the mountains’ crest. Retrospective analysis of radar tracks in the vicinity of the crash site allowed us to identify his actual flight path. It was documented by a radar track which the USAF identified early in the search, but which was never verified or connected to Fossett’s flight. The track appears to follow the John Muir Trail, a famous hiking trail that Fossett had completed in his early years, as noted in his autobiography, Chasing the Wind [9]. The aircraft dropped off radar approximately 0.8 nmi west of the actual crash site (see figure 2 below).

-6-
Figure 2. Fossett’s final track followed the John Muir Trail
For our scenario analysis, four distinct scenarios were identified from the data in hand (see figure 3). Three relied on the radar track for LKPs, while the fourth was based on the Mud Flats sighting. From the Powell Canyon track northernmost LKP, four straight line flight paths were drawn to the north (maintaining last measured course and speed with azimuthal variations) for the Northbound Scenarios. From the same LKP tracks were drawn to the east (towards the Sodaville sighting) for the Eastbound Scenarios. A third set considered southbound flight paths drawn from the southernmost LKP on the track. All tracks continued in the same direction until a point was reached where a direct line back towards the Flying M would have returned the aircraft by 11:00AM, Fossett’s estimated desired return time. For the last scenario, a hypothetical track was continued eastbound from the Mud Flats sighting and then directly back to the Flying M, in this case honoring an 11:15AM return time. Figure 3 shows the resulting twelve scenarios modeled in SAROPS, along with the weights assigned to each scenario.
We used SAROPS to perform Monte Carlo simulations of the twelve possible flight scenarios. Each SAROPS replication deposited the aircraft somewhere along the flight path, favoring areas of higher hazards to flight such as Walker Lake (potential bird strike area) and mountainous terrain. The picture in the left side of figure 4 shows the probability map that resulted from summing all the SAROPS simulated crash sites. The same probabilities were imported into Google Earth for viewing. The Google Earth display also shows the CAP gridding system for this search; each numbered grid was 30 minutes square and further subdivided into quarters, lettered “a” through “d”. Shading

-7-
of 7.5-minute grid squares in the Google Earth display was normalized to the highest probability grids.
Figure 3. Scenarios for modeling in SAROPS and associated probabilities
Figure 4. SAROPS probability map output and Google Earth representation.
1% 4%4%4%2%
10%
10%
12%12%
8%
8%
25%
1%1% 4%4%4%4%4%4%2%2%
10%10%
10%10%
12%12%12%12%
8%8%
8%8%
25%25%
Mud Flats
sighting
Northbound
Scenarios
Eastbound Scenarios
Southbound
Scenarios
Powell Cyn Radar Track
MonoLake
Walker
Lake
Sodaville
Virginia
Lakes
N
1% 4%4%4%2%
10%
10%
12%12%
8%
8%
25%
1%1% 4%4%4%4%4%4%2%2%
10%10%
10%10%
12%12%12%12%
8%8%
8%8%
25%25%
Mud Flats
sighting
Northbound
Scenarios
Eastbound Scenarios
Southbound
Scenarios
Powell Cyn Radar Track
MonoLake
Walker
Lake
Sodaville
Virginia
Lakes
N
SAROPS Screen ShotGoogle Earth Display
SAROPS Screen ShotGoogle Earth Display

-8-
Figure 4 represents the target “prior” distribution, based on the conditions of the flight and the gathered evidence. The prior distribution suggests that the highest likelihood areas for the crash are in the vicinity of the Flying ~M~ (especially in the south east, based on the Mud Flats sighting), north of the radar track LKP below Walker Lake, and in the Wassuk mountains between the Flying ~M~ Ranch and Walker Lake.
Analyzing the Search Effort The next step was to assess the effectiveness of the many previous search efforts. These efforts included air and ground searches by multiple agencies, satellite searches for Emergency Locator Transmitter (ELT) beacon signals1, sidescan sonar sweeps of Walker Lake, high resolution photographic surveys analyzed by computer, radar analysis, and Amazon Mechanical Turk “crowdsourcing” review of visual satellite images. We opted to consider only air searches since these covered the most area and were well-documented. Limited radar search data were implicitly included in the scenario development. Air search data came in a variety of forms, some more complete than others. Detailed sortie data were only available for the FF effort, so we analyzed these data explicitly; detailed CAP and ANG data were requested but were never obtained2. Thus, our analysis provides at best a lower bound on the probabilities of detection (PODs) achieved in this search. Figure 5 shows the statistics of sorties and flight hours spent in the initial search.
Figure 5. Sortie Statistics for Fossett Air Search Effort
Estimating the POD for a search aircraft flying over land is a complex matter that has been studied exhaustively [10]. Factors that influence an aerial observer’s likelihood of spotting wreckage include the size and state of the target, the terrain limitations to line of sight, vegetative cover, the speed and altitude of the search aircraft, the number of

-9-
observers onboard, atmospheric visibility, and the sun angle. The effective sweep width accounts for all these factors and is used in the generalized search equation to compute the estimated POD for a given search sector. The Fossett search was further complicated because the condition of the target was unknown. At first searchers sought an intact aircraft in a relatively open landing area. As the search progressed with negative results, it became apparent that the crash was more likely to be in an unsurvivable location and the target could possibly be compressed or scattered and therefore unrecognizable as a wreck. The real possibility of a post-crash fire further complicated the matter3. By the end of the search effort, it was generally acknowledged that the wreck was likely not recognizable and was possibly hidden from plain sight4. Early in the search, sorties were flown with little recordkeeping of areas swept. After it became apparent that the search would last more than a couple days, a more organized approach was instituted and schedules of sorties flown were retained for future reference. Search grid assignments, aircraft type, and even the observers onboard were noted. By 10 September, formal documentation was available. By 12 September, FF search aircraft began operating with portable GPS units5 to document the flight path of the aircraft. As a result, the FF sortie data fell into three distinct categories: no documentation, limited documentation (aircraft call sign, type, date, and grid assigned), and full documentation (sortie records, plus GPS track data). To analyze these data and combine them into an overall picture of the POD achieved in each grid square, we assumed sortie lengths of 2.5 hours (where no other information was available), subtracting an estimate of transit time to calculate time spent on station; we used search speeds of 90 kts for fixed wing aircraft and 60 kts for helicopters; we assumed Above Ground Level (AGL) altitudes of 500’ for fixed wing aircraft and 200’ for helicopters; and we assumed the presence of two onboard observers except for the limited number of two-place fixed-wing aircraft. From these assumptions, we estimated the total path length flown in each grid cell for non-GPS sorties. For GPS sorties, we explicitly calculated the path lengths from the data. Transits to and from search areas were excluded from this calculation. We used an official SAR publication for estimates of aerial search sweep width [11]. We selected a target size between “person” and “vehicle”, assumed greater than 20 nmi meteorological visibility, and that search sorties were flown lower than 1000’ AGL. These assumptions resulted in a nominal sweep width of 0.5 nmi, measured 0.25 nmi to either side of the track. We applied a correction factor to account for terrain impacts on sweep width. Using 0.5-minute GLOBE Digital Terrain Elevation Data for the search areas, we divided the 7.5-min search grids into three categories (flat, hilly, and mountainous) and scaled the sweep width by factors of 1.0, 0.5, and 0.3 respectively. This essentially penalized the coverage for aircraft searching in difficult terrain.

-10-
We also accounted for the search speed based on guidance found in reference [12]. Aircraft that searched slower than 80 kts were credited with an increase in sweep width according to the reference. The maximum increase used was 20% for helicopters flying at 60 kts or slower. Speeds in between 60 and 80 kts received interpolated increases; the nominal sweep width was used for 80 kts or higher. Where GPS track data could be used to indicate real-time aircraft speed, we calculated the instantaneous sweep width “credit” and applied it along the track. Figure 6 shows an example of this calculation for a track northeast of Mono Lake near the CA-NV border.
Figure 6. Calculation of search sweep width for GPS tracks of search aircraft. Once path length was determined, we applied the Koopman random search formula [13] to estimate the POD achieved for each sortie in each 7.5-minute grid cell:
POD = 1 - e-wL/A, where w is the site- and sortie-adjusted sweep width, L is the path length in the cell, and A is the total area of the cell. The random search formula was deemed a good approximation because many of the searches lacked a systematic pattern and the prior probability of the target’s location in the cell was uniformly distributed. PODs for all sorties in a given grid cell were then combined to produce a total POD for that cell. The private FF search effort achieved an amazing 76% overall probability of successful target detection in the grids where SAROPS calculated a non-zero probability for the prior distribution of the target. Note that this estimate could only increase from the addition of the CAP and ANG search efforts, which were not included in this analysis. Figure 7 shows the individual grid PODs achieved by the FF aircraft over the course of the search; the Flying M ranch is located midway between grids 164 and 165. Note that
0 5 10 15 20 25 30 3540
60
80
100
120
0 5 10 15 20 25 30 351
1.2
1.4
1.6
1.8
0 5 10 15 20 25 30 350.25
0.3
0.35
0.4
0.45
Grid 221A, Track #27
Terrain Factor = 0.5 (Hilly)
Time (min)
Time (min)
Time (min)
Sp
ee
d (
kt)
Sp
ee
d F
acto
rE
ffe
ctive
Sw
ee
p W
idth
(n
mi)
Sweep Width = (0.5) * (0.5) * (~1.25)
= ~0.31 nmi
~1.25
~0.31 nmi
~70 kts
0 5 10 15 20 25 30 3540
60
80
100
120
0 5 10 15 20 25 30 351
1.2
1.4
1.6
1.8
0 5 10 15 20 25 30 350.25
0.3
0.35
0.4
0.45
Grid 221A, Track #27
Terrain Factor = 0.5 (Hilly)
Time (min)
Time (min)
Time (min)
Sp
ee
d (
kt)
Sp
ee
d F
acto
rE
ffe
ctive
Sw
ee
p W
idth
(n
mi)
Sweep Width = (0.5) * (0.5) * (~1.25)
= ~0.31 nmi
~1.25
~0.31 nmi
~70 kts
Grid 221A, Track #27
Terrain Factor = 0.5 (Hilly)
Time (min)
Time (min)
Time (min)
Sp
ee
d (
kt)
Sp
ee
d F
acto
rE
ffe
ctive
Sw
ee
p W
idth
(n
mi)
Sweep Width = (0.5) * (0.5) * (~1.25)
= ~0.31 nmi
~1.25
~0.31 nmi
~70 kts

-11-
the actual crash site was located in the upper left hand corner of grid 276; we assessed that the FF team searched this grid to 28% effectiveness (see figure 8).
Figure 7. PODs achieved by Flying M Aircraft in September 2007
Figure 8. Air search tracks in Grid 276A, the actual crash site
FF search effort results0.00 0.44 0.51 0.50 0.00 0.00 0.00 0.00
0.00 0.46 0.48 0.57 0.14 0.00 0.00 0.00
0.00 0.53 0.75 0.62 0.65 0.65 0.37 0.37 0.00 0.00
0.11 0.55 0.64 0.63 0.80 0.65 0.41 0.44 0.07 0.01
0.73 0.74 0.73 0.93 0.57 0.57 0.18 0.22 0.25 0.25
0.82 0.90 0.87 0.76 0.67 0.73 0.26 0.22 0.25 0.25
0.18 0.24 0.65 0.84 0.92 0.95 0.83 0.85 0.80 0.69 0.06 0.00
0.04 0.16 0.73 0.90 0.97 0.98 0.81 0.69 0.87 0.67 0.24 0.01
0.04 0.13 0.48 0.80 0.98 0.98 0.89 0.95 0.51 0.27 0.17 0.40
0.00 0.05 0.38 0.80 0.96 0.97 0.93 0.89 0.67 0.54 0.20 0.25
0.18 0.22 0.11 0.83 0.80 0.52 0.78 0.61 0.17 0.10 0.25 0.23
0.21 0.15 0.33 0.53 0.77 0.48 0.54 0.41 0.09 0.09 0.24 0.30
0.28 0.46 0.45 0.49 0.19 0.25 0.01 0.00
POD < 0.50
0.51 < POD < 0.75
0.29 0.36 0.22 0.31 0.30 0.27 0.00 0.00 POD > 0.76
191
219
247
276
248 252
277 278 279
249 250B 251
196
220 221 222 223 224
192 193 194 195
140
164 165 166 167 168
136 137 138 139
108 109 110 111

-12-
Recommendations for Further Search The combination of the crash site prior distribution and a grid-by-grid assessment of the unsuccessful search effort resulted in the posterior distribution of the target’s location. Assume the search area is divided into j = 1, ..., J cells, and
– p( j ) = Probability that the target is in cell j (prior distribution) – f( j ) = Search effort that has been applied to cell j – b( j , f( j ) ) = Conditional probability of target detection when effort f( j )
is applied to cell j, given that the target is actually in cell j. The posterior probability in cell j is given by
( )
[ ]
1 , ( ) ( )
1 Pr
b j f j p j
Detection
− −
.
The cells with the highest posterior values are shown in figure 9.
Figure 9. Posterior Distribution for Crash Site
1
Pr[ ] ( , ( )) ( )J
j
Detection b j f j p j=
=∑

-13-
The posterior distribution reflected the intensive search effort in the vicinity of the Flying ~M~, Mud Flats, and the Wassuk mountains. Open and flat areas that were easier to search were effectively “cleared”, resulting in very little remaining probability of target containment. Conversely, the mountainous areas in the Sierra Nevadas were relatively unsearched, but the lack of significant “prior” probability in these areas tended to downplay those grids’ importance. The areas that stood out in the posterior were mountainous areas surrounding Walker Lake. According to FF officials, these areas were searched exhaustively early on, before detailed records were kept. Only a few grids piqued the interest of the team after a careful review of the results. To make recommendations for future search efforts, we implemented a simple optimization algorithm [described in 14] which considered helicopter flight hours available, sweep width in each grid, and the posterior distribution. The total Probability of Success (POS) for detecting the target is the probability of detection summed over all cells. Figure 10 shows a plot of POS as a function of additional flight hours spent searching. The curve starts at 76% (the status quo with no additional effort) and increases with diminishing returns as additional sorties are flown. This curve was provided to the Fossett family to support decisions about follow-on search efforts. Based partly on this work, it was decided to fund an additional week’s worth of a search helicopter to investigate the highest-probability areas. Our optimization provided recommendations for which sectors should be searched first.
Figure 10. Probability of Success for future search efforts The POS achieved in the early search was astonishing, especially considering that our calculations included neither the official government efforts, nor the alternate search methods. With such a high POS, the obvious question is “Are we looking in the wrong place?” Our team considered this question, and performed an excursion analysis where we added a “rest of world” scenario to our prior distribution, modeled as a Gaussian distribution centered on the Flying ~M~ Ranch and extending out to a range of half the
0.75
0.8
0.85
0.9
0.95
1
0.0 20.0 40.0 60.0 80.0 100.0 120.0 140.0 160.0 180.0
additional helicopter hours
Pro
bab
ilit
y o
f S
uccess
0.7610 (no addit
effort)
0.93967
0.89633
P(success)Helo hours
0.7610 (no addit
effort)
0.93967
0.89633
P(success)Helo hours

-14-
aircraft’s endurance, minus a fuel reserve of one hour. The resulting prior highlighted areas in the Sierra Nevada mountains near where the wreck was actually discovered. However, the subsequent optimization shied away from these mountainous areas and recommended continued search in flatter terrain because these areas were more productive from a sweep width point of view. Unlimited additional search effort would have mediated this bias. This exercise highlights the importance of careful scenario development and screening of all data available. The radar track of Fossett’s actual flight provided to CAP officials early in the search should have been more carefully considered (both during the search and also in our follow-on analysis), especially considering Fossett’s stated intentions for the flight. A scenario using this track as a LKP would have immediately highlighted the inadequate searches performed in grid 276. In September 2008, four months after the FF follow-on helicopter searches came up empty-handed, the Powell Canyon radar track was attributed to a local pilot returning from a Labor Day breakfast at Bridgeport. This information was discovered only after pilots at the local Hawthorne airport were interviewed in preparation for a ground search in the nearby Wassuk mountains. This startling discovery changed the scenario landscape significantly; data no longer existed to suggest that Fossett had crossed to the eastern side of the Wassuk Range. This new information re-focused the search on the Mud Flats area and seemed to build credibility for the ranch-hand’s sighting just south of the Flying ~M~ Ranch. The ground expedition focused its efforts on likely canyons in the mountains a scant five miles southeast of the Flying ~M~, but nothing was found. Fossett’s wreck was discovered less than a month later, ending all speculation, and casting significant doubt on the validity of the Mud Flats sighting.
Postscript The official NTSB report for the accident was released 9 July 2009 [15]. It cited an “inadvertent encounter with downdrafts that exceeded the climb capability of the airplane” as the probable cause of the wreck. The airplane was severely fragmented and a post-crash fire burned most of the fabric and several nearby trees. Airborne photos of the wreck site showed tires, the 4-cylinder engine, and scraps of blue and orange fabric recognizable from helicopter altitudes. The sweep width assumptions used in this analysis would have been appropriate for this target site. Our approach used careful and methodical consideration of all data available, with associated uncertainties, to form an analytic assessment of the highest likelihood areas for search efforts. Our weighted scenarios allowed inconsistent information (radar tracks, visual sightings, terrain, flight intentions, and on-deck time constraints) to be combined with subjective weights that capture the confidence (or lack thereof) in each piece of data. The careful analysis of the detection effectiveness of sorties flown and the resulting accounting for this search by calculating the posterior distribution on impact location formed a solid basis for planning the next phase of search.

-15-
The process used in our analysis was highly dependent on the data assumptions that formed the prior distribution. Unfortunately, the erroneous data used in the scenario development, and the restricted availability of CAP search data and government-held radar tracks combined to produce an overall result that biased our analysis. If there is one lesson to be learned from this experience, it is that better information sharing between agencies and more thorough investigation of data leads is essential for forming a complete picture of the possibilities leading to the crash.
Notes 1. Hardened Emergency Locator Transmitters, or ELTs, are installed in most general aviation aircraft. They are fitted with a switch that senses high acceleration rates associated with crashes and transmit a beacon signal that can be detected by the Civil Air Patrol or by the COPSAS-SARSAT low-altitude satellite constellation. No ELT signal from Fossett’s aircraft was ever detected, implying that the unit had been destroyed on impact. 2. CAP and ANG efforts were documented in the data obtained by a formal Freedom of Information (FOIA) Act request to the AFRCC. The information obtained listed sorties sent to each grid box on each day, but gave no indication of the time spent searching, or what type aircraft was employed. 3. A crash resulting in a fire can aid target detection if the crash occurred in a vegetated area; if it occurred on rocks the burned area would not stand out as prominently. 4. In October 2007 the Fossett family hired High Altitude Mapping Missions (HAMM) and Fireball Technologies to conduct high-resolution photographic surveys of the wide area where Fossett might have crashed. Thousands of images were processed by computer to search for the unique blue color of the aircraft. Though this search turned up many blue objects, none were deemed to be the actual wreck. HAMM scientists felt that this result verified that the crash was likely unrecognizable from the air. Unfortunately, the actual crash site was located in a narrow area between adjacent images. 5. Garmin eTrex units were used, along with MAPTECH software for downloading tracks.
Acknowledgements
The author would like to gratefully acknowledge Mark Anderson and Lawrence D. Stone of Metron, John R. Frost of the US Coast Guard, and the dedicated Friends of Steve Fossett, for their critical (and entirely volunteer) support and the vast operational and technical knowledge they contributed to this analysis.

-16-
References [1] 50,000 Volunteers Join Distributed Search For Steve Fossett, Wired News, Steve Friess, September 11, 2007 [2] Civil Air Patrol reports in the information released to the Fossett family in response to a Freedom of Information Act Request to the Air Force Rescue Coordination Center. [3] Search for Steve Fossett: CAP’s World-Class Effort Combines High-Tech Tools,
Dedicated Volunteers, CAP Volunteer magazine, Nov-Dec 2007 [4] Operations Analysis During the Underwater Search for Scorpion, Henry R. Richardson and Lawrence D. Stone, Daniel H. Wagner Associates, Naval Research Logistics Quarterly, Vol 18 No 2, June 1971 pp 141 – 157. [5] Search for the SS Central America: Mathematical Treasure Hunting, Lawrence D. Stone, Metron Inc., INFORMS Search and Surveillance Simulation, 1992. [6] Search and Rescue Optimal Planning System (SAROPS), Wikipedia http://en.wikipedia.org/wiki/Search_and_Rescue_Optimal_Planning_System_(SAROPS) [7] How Are People Lost at Sea Found? Adam Hadhazy, Scientific American online, March 2009, http://www.scientificamerican.com/article.cfm?id=people-lost-at-sea-found [8] Mike Gilles, personal communication. [9] Chasing the Wind: The Autobiography of Steve Fossett, Steve Fossett with Will Hasley, Virgin Books 2006. [10] Sweep Width Estimation for Ground Search and Rescue, Robert Koester et al, prepared for US Department of Homeland Security USCG Operations, 30 Dec 2004. [11] International Aeronautical and Maritime SAR Manual Vol II, Appendix N, Tables N-9 and N-10. [12] CMDINST M16130.2D, US Coast Guard Office of Search and Rescue, Table H-9 [13] Naval Operations Analysis (Third Edition), edited by Daniel H. Wagner et al, Department of Mathematics, US Naval Academy, 1999. [14] Theory of Optimal Search, Lawrence D. Stone, Military Applications Society, Second Edition, 2004. [15] National Transportation Safety Board final report for incident number SEA07FA277, http://www.ntsb.gov/ntsb/brief.asp?ev_id=20081007X17184&key.