
Aplicación del Robot NXT en la Educación
11
APLICACIÓN DEL RÓBÓT NXT EN LA EDUCACIÓ N
-
Upload
lessly-quinones -
Category
Documents
-
view
227 -
download
2
description
Es un manual en el cual se muestran como la fisica, quimica y matemática se aplican en un robot nxt.
Transcript of Aplicación del Robot NXT en la Educación
APLICACIÓ N DEL RÓBÓT NXT EN LA
EDUCACIÓ N

Contenido
Introducción…………………………………………………………………………..1 Piezas de lego Mindstorms…………………………………………………….4 Aplicación de la tecnologia para mejorar la educación
En la química………………………………………………………………..6
En la física…………………………………………………………………….8
En la matematica………………………………………………………….9

Definiciones Básicas
Engranajes: tipos de engranajes y
relaciones
Qué es un engranaje?
Es una rueda dentada que encaja con otros
engranajes
Para qué sirven?
Los engranajes sirven para cambiar:
•velocidad
•torque (fuerza de rotación)
•dirección de los ejes.
Diferentes tipos de engranajes
Engranaje RECTO
Engranajes LIBRES o INTERMEDIOS
Engranaje GUSANO o SIN FIN
1

Uso del engranaje GUSANO o SIN FIN
Engranaje CÓNICO o BISELADO
BANDAS Y POLEAS
PIÑON Y CREMALLERA
Relaciones de engranajes
La relación de engranaje es la relación entre el
número de dientes en un engranaje respecto al
número de dientes en otro.
Engranaje chico con 8 dientes (eje de entrada)
y engranaje grande con 40 dientes (eje de salida)
2
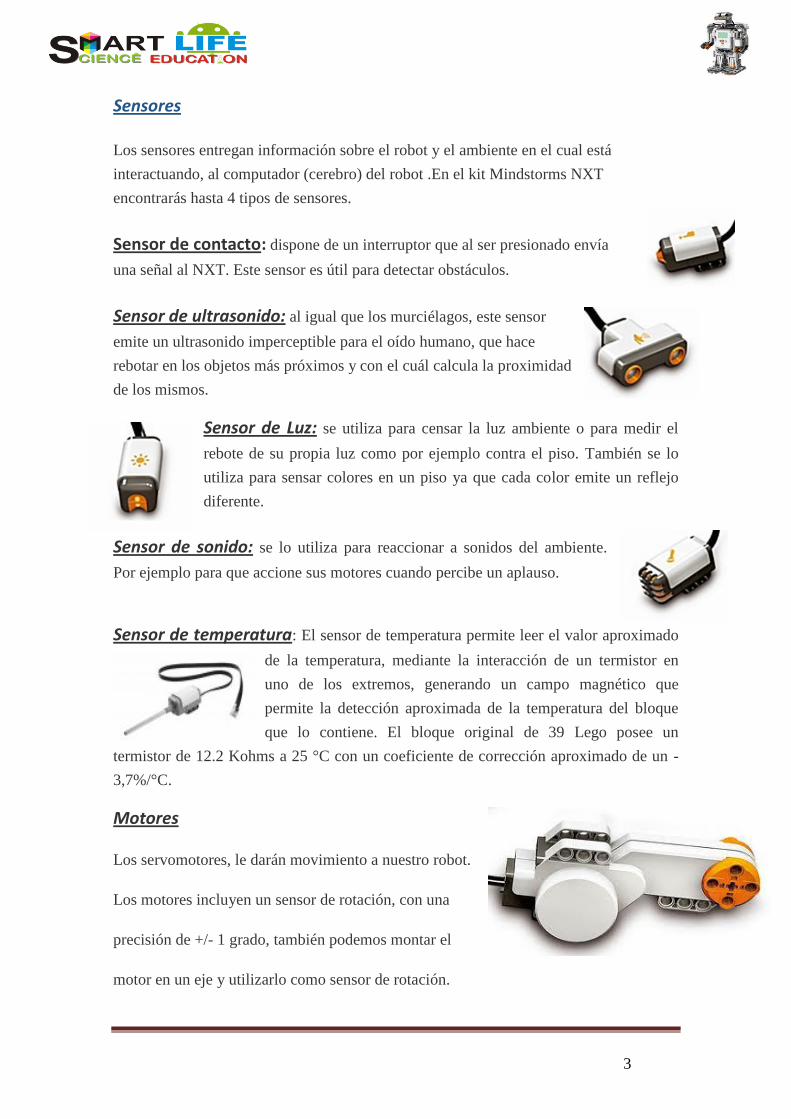
Sensores
Los sensores entregan información sobre el robot y el ambiente en el cual está
interactuando, al computador (cerebro) del robot .En el kit Mindstorms NXT
encontrarás hasta 4 tipos de sensores.
Sensor de contacto: dispone de un interruptor que al ser presionado envía
una señal al NXT. Este sensor es útil para detectar obstáculos.
Sensor de ultrasonido: al igual que los murciélagos, este sensor
emite un ultrasonido imperceptible para el oído humano, que hace
rebotar en los objetos más próximos y con el cuál calcula la proximidad
de los mismos.
Sensor de Luz: se utiliza para censar la luz ambiente o para medir el
rebote de su propia luz como por ejemplo contra el piso. También se lo
utiliza para sensar colores en un piso ya que cada color emite un reflejo
diferente.
Sensor de sonido: se lo utiliza para reaccionar a sonidos del ambiente.
Por ejemplo para que accione sus motores cuando percibe un aplauso.
Sensor de temperatura: El sensor de temperatura permite leer el valor aproximado
de la temperatura, mediante la interacción de un termistor en
uno de los extremos, generando un campo magnético que
permite la detección aproximada de la temperatura del bloque
que lo contiene. El bloque original de 39 Lego posee un
termistor de 12.2 Kohms a 25 °C con un coeficiente de corrección aproximado de un -
3,7%/°C.
Motores
Los servomotores, le darán movimiento a nuestro robot.
Los motores incluyen un sensor de rotación, con una
precisión de +/- 1 grado, también podemos montar el
motor en un eje y utilizarlo como sensor de rotación.
3

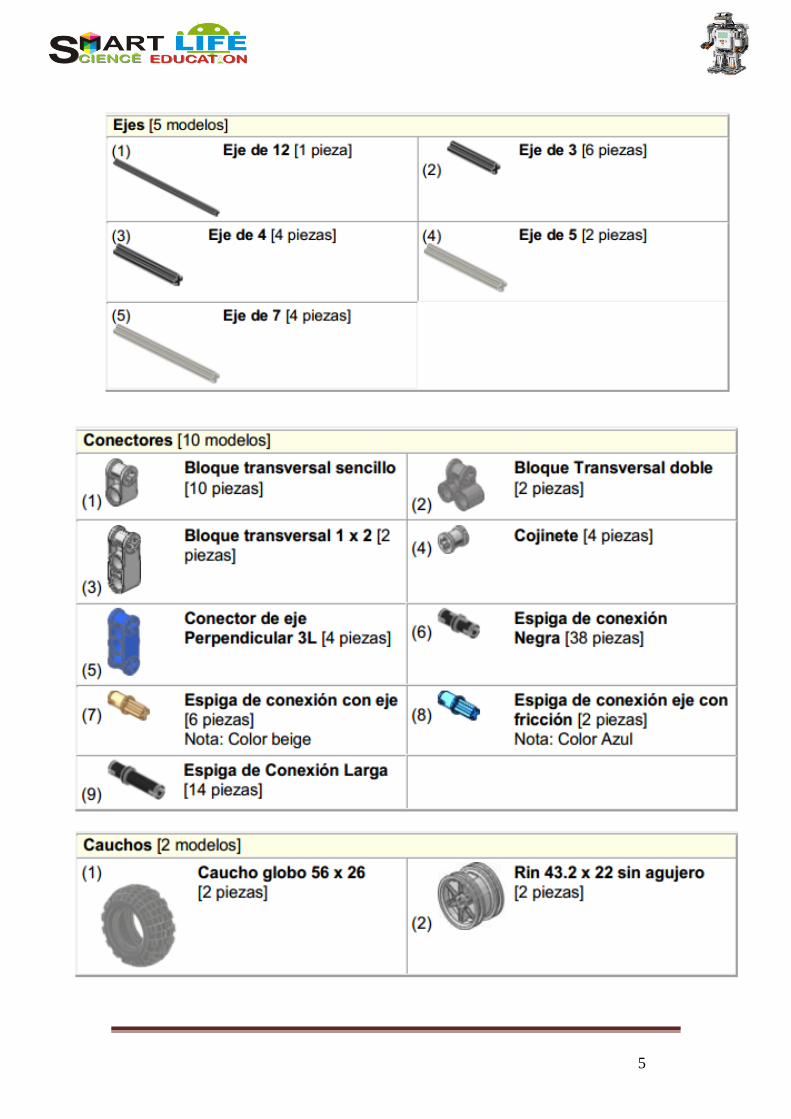
Piezas de Lego Mindstorms NXT 2.0
4
5
Aplicación de la tecnología para poder mejorar la educación
En la química:
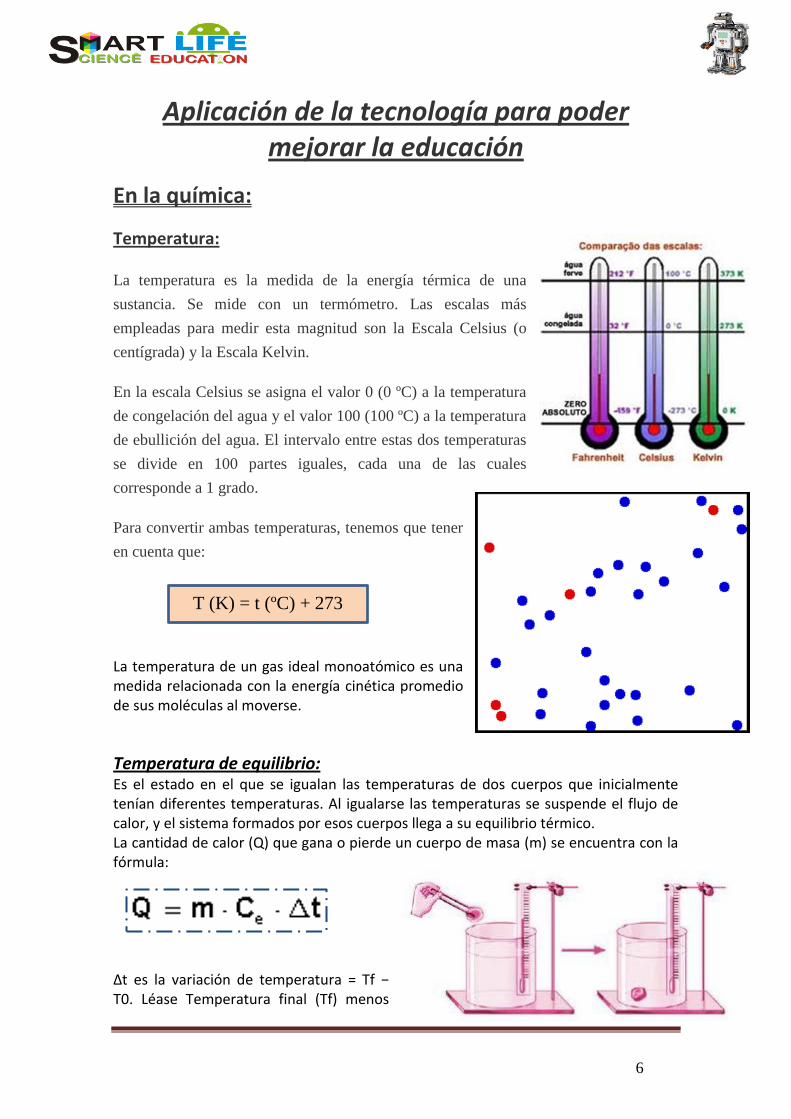
Temperatura:
La temperatura es la medida de la energía térmica de una
sustancia. Se mide con un termómetro. Las escalas más
empleadas para medir esta magnitud son la Escala Celsius (o
centígrada) y la Escala Kelvin.
En la escala Celsius se asigna el valor 0 (0 ºC) a la temperatura
de congelación del agua y el valor 100 (100 ºC) a la temperatura
de ebullición del agua. El intervalo entre estas dos temperaturas
se divide en 100 partes iguales, cada una de las cuales
corresponde a 1 grado.
Para convertir ambas temperaturas, tenemos que tener
en cuenta que:
La temperatura de un gas ideal monoatómico es una medida relacionada con la energía cinética promedio de sus moléculas al moverse.
Temperatura de equilibrio: Es el estado en el que se igualan las temperaturas de dos cuerpos que inicialmente tenían diferentes temperaturas. Al igualarse las temperaturas se suspende el flujo de calor, y el sistema formados por esos cuerpos llega a su equilibrio térmico. La cantidad de calor (Q) que gana o pierde un cuerpo de masa (m) se encuentra con la fórmula:
Δt es la variación de temperatura = Tf − T0. Léase Temperatura final (Tf) menos
T (K) = t (ºC) + 273
6
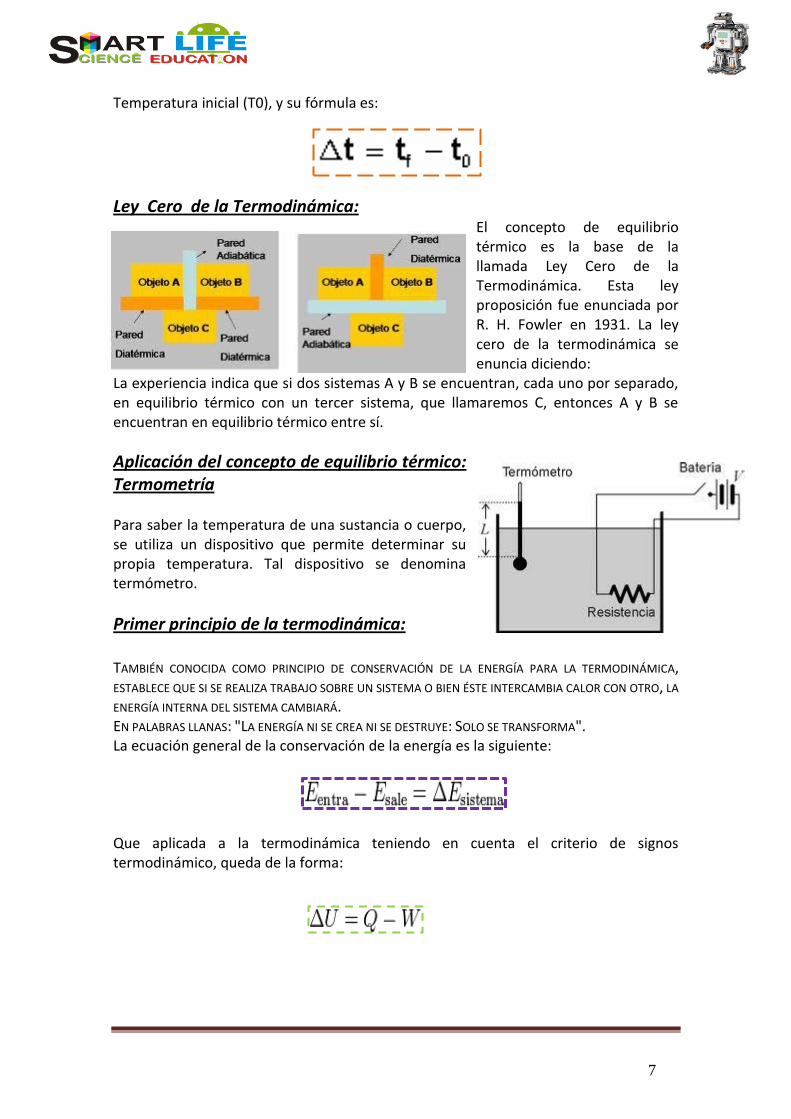
Temperatura inicial (T0), y su fórmula es:
Ley Cero de la Termodinámica:
El concepto de equilibrio térmico es la base de la llamada Ley Cero de la Termodinámica. Esta ley proposición fue enunciada por R. H. Fowler en 1931. La ley cero de la termodinámica se enuncia diciendo:
La experiencia indica que si dos sistemas A y B se encuentran, cada uno por separado, en equilibrio térmico con un tercer sistema, que llamaremos C, entonces A y B se encuentran en equilibrio térmico entre sí.
Aplicación del concepto de equilibrio térmico: Termometría Para saber la temperatura de una sustancia o cuerpo, se utiliza un dispositivo que permite determinar su propia temperatura. Tal dispositivo se denomina termómetro.
Primer principio de la termodinámica: TAMBIÉN CONOCIDA COMO PRINCIPIO DE CONSERVACIÓN DE LA ENERGÍA PARA LA TERMODINÁMICA, ESTABLECE QUE SI SE REALIZA TRABAJO SOBRE UN SISTEMA O BIEN ÉSTE INTERCAMBIA CALOR CON OTRO, LA
ENERGÍA INTERNA DEL SISTEMA CAMBIARÁ. EN PALABRAS LLANAS: "LA ENERGÍA NI SE CREA NI SE DESTRUYE: SOLO SE TRANSFORMA". La ecuación general de la conservación de la energía es la siguiente: Que aplicada a la termodinámica teniendo en cuenta el criterio de signos termodinámico, queda de la forma:
7

En la física: Torque:
Es la intensidad con que tiende a rotar un cuerpo.
La fuerza aplicable en el objeto depende mucho de la
distancia en la que se ejerza, por ejemplo a mayor distancia
menor fuerza y viceversa.
MCU:
Es el movimiento de un cuerpo descrito principalmente en un trayectoria circular a
velocidad constante en un determinado tiempo.
La velocidad angular es una medida de velocidad de rotación que tiene un cuerpo en
una relación con el ángulo girado ante una distancia barrida determinada.
La longitud de arco que recorre la parte del sensor del NXT entre la longitud de la
palanca o sea el brazo del NXT da por resultado el ángulo de giro.
Dónde:
r: la longitud de la palanca del NXT.
α: el ángulo de giro.
8
L. arco = α.r

En la matemática:
Engranaje:
Engranaje es una rueda o cilindro dentado empleado para
transmitir un movimiento giratorio o alternativo desde una
parte de una máquina a otra. Un conjunto de dos o más
engranajes que transmite el movimiento de un eje a otro se
denomina tren de engranajes. Los engranajes se utilizan sobre
todo para transmitir movimiento giratorio, pero usando engranajes apropiados y
piezas dentadas planas pueden transformar movimiento alternativo en giratorio y
viceversa.
Para saber cuántas vueltas son necesarias en el engranaje chico para que el engranaje
mayor de una vuelta se pondrá en práctica la siguiente formula.
Un ejemplo claro está en el NXT ya que un engranaje tiene 8 dientes y el otro tiene 56
dientes. Ahora aplicamos la formula
Nd1. NV1= Nd2. NV2
8. X = 56 .1
X= 7
Son siete las vueltas que debe dar el engranaje chico para que el engranaje grande de
una vuelta.
Nd1. NV1= Nd2. NV2
9


















