Ant colony learning algorithm for optimal controlbdeschutter/pub/rep/10_029.pdf · Ant Colony...
30
Delft University of Technology Delft Center for Systems and Control Technical report 10-029 Ant colony learning algorithm for optimal control ∗ J.M. van Ast, R. Babuˇ ska, and B. De Schutter If you want to cite this report, please use the following reference instead: J.M. van Ast, R. Babuˇ ska, and B. De Schutter, “Ant colony learning algorithm for optimal control,” in Interactive Collaborative Information Systems (R. Babuˇ ska and F.C.A. Groen, eds.), vol. 281 of Studies in Computational Intelligence, Berlin, Ger- many: Springer, ISBN 978-3-642-11687-2, pp. 155–182, 2010. Delft Center for Systems and Control Delft University of Technology Mekelweg 2, 2628 CD Delft The Netherlands phone: +31-15-278.51.19 (secretary) fax: +31-15-278.66.79 URL: http://www.dcsc.tudelft.nl ∗ This report can also be downloaded via http://pub.deschutter.info/abs/10_029.html
-
Upload
duongthuan -
Category
Documents
-
view
220 -
download
4
Transcript of Ant colony learning algorithm for optimal controlbdeschutter/pub/rep/10_029.pdf · Ant Colony...

Delft University of Technology
Delft Center for Systems and Control
Technical report 10-029
Ant colony learning algorithm for optimal
control∗
J.M. van Ast, R. Babuska, and B. De Schutter
If you want to cite this report, please use the following reference instead:
J.M. van Ast, R. Babuska, and B. De Schutter, “Ant colony learning algorithm for
optimal control,” in Interactive Collaborative Information Systems (R. Babuska and
F.C.A. Groen, eds.), vol. 281 of Studies in Computational Intelligence, Berlin, Ger-
many: Springer, ISBN 978-3-642-11687-2, pp. 155–182, 2010.
Delft Center for Systems and Control
Delft University of Technology
Mekelweg 2, 2628 CD Delft
The Netherlands
phone: +31-15-278.51.19 (secretary)
fax: +31-15-278.66.79
URL: http://www.dcsc.tudelft.nl
∗This report can also be downloaded via http://pub.deschutter.info/abs/10_029.html

Ant Colony Learning Algorithm for Optimal
Control
Jelmer Marinus van Ast, Robert Babuska, and Bart De Schutter
Abstract Ant Colony Optimization (ACO) is an optimization heuristic for solving
combinatorial optimization problems and it is inspired by the swarming behavior
of foraging ants. ACO has been successfully applied in various domains, such as
routing and scheduling. In particular, the agents, called ants here, are very efficient
at sampling the problem space and quickly finding good solutions. Motivated by the
advantages of ACO in combinatorial optimization, we develop a novel framework
for finding optimal control policies that we call Ant Colony Learning (ACL). In
ACL, the ants all work together to collectively learn optimal control policies for any
given control problem for a system with nonlinear dynamics. In this chapter, we will
discuss the ACL framework and its implementation with crisp and fuzzy partitioning
of the state space. We demonstrate the use of both versions in the control problem of
two-dimensional navigation in an environment with variable damping and discuss
their performance.
1 Introduction
Ant Colony Optimization (ACO) is a metaheuristic for solving combinatorial opti-
mization problems [1]. Inspired by ants and their behavior in finding shortest paths
from their nest to sources of food, the virtual ants in ACO aim at jointly finding opti-
Jelmer Marinus van Ast
Delft Center for Systems and Control, Delft University of Technology, Mekelweg 2, 2628 CD
Delft, The Netherlands, e-mail: [email protected]
Robert Babuska
Delft Center for Systems and Control, Delft University of Technology, Mekelweg 2, 2628 CD
Delft, The Netherlands e-mail: [email protected]
Bart De Schutter
Delft Center for Systems and Control & Marine and Transport Technology, Delft University of
Technology, Mekelweg 2, 2628 CD Delft, The Netherlands e-mail: [email protected]
1

2 Jelmer Marinus van Ast, Robert Babuska, and Bart De Schutter
mal paths in a given search space. The key ingredients in ACO are the pheromones.
With real ants, these are chemicals deposited by the ants and their concentration en-
codes a map of trajectories, where stronger concentrations represent the trajectories
that are more likely to be optimal. In ACO, the ants read and write values to a com-
mon pheromone matrix. Each ant autonomously decides on its actions biased by
these pheromone values. This indirect form of communication is called stigmergy.
Over time, the pheromone matrix converges to encode the optimal solution of the
combinatorial optimization problem, but the ants typically do not all converge to
this solution, thereby allowing for constant exploration and the ability to adapt the
pheromone matrix to changes in the problem structure. These characteristics have
resulted in a strong increase of interest in ACO over the last decade since its intro-
duction in the early nineties [2].
The Ant System (AS), which is the basic ACO algorithm, and its variants, have
successfully been applied to various optimization problems, such as the traveling
salesman problem [3], load balancing [4], job shop scheduling [5, 6], optimal path
planning for mobile robots [7], and routing in telecommunication networks [8]. An
implementation of the ACO concept of pheromone trails for real robotic systems is
described in [9]. A survey of industrial applications of ACO is presented in [10]. An
overview of ACO and other metaheuristics to stochastic combinatorial optimization
problems can be found in [11].
This chapter presents the extension of ACO to the learning of optimal control
policies for continuous-time, continuous-state dynamic systems. We call this new
class of algorithms Ant Colony Learning (ACL) and present two variants, one with
a crisp partitioning of the state space and one with a fuzzy partitioning. The work in
this chapter is based on [12] and [13] in which we have introduced these respective
variants of ACL. This chapter not only unifies the presentation of both versions, it
also discusses them in greater detail, both theoretically and practically. Crisp ACL,
as we call ACL with crisp partitioning of the state space, is the more straightforward
extension of classical ACO to solving optimal control problems. The state space is
quantized in a crisp manner, such that each value of the continuous-valued state
is mapped to exactly one bin. This renders the control problem non-deterministic,
as state transitions are measured in the quantized domain, but originate from the
continuous domain. This makes the control problem much more difficult to solve.
Therefore, the variant of ACL in which the state space is partitioned with fuzzy
membership functions was developed. We call this variant Fuzzy ACL. With a fuzzy
partitioning, the continuous-valued state is mapped to the set of membership func-
tions. The state is a member of each of these membership functions to a certain
degree. The resulting Fuzzy ACL algorithm is somewhat more complicated com-
pared to Crisp ACL, but there are no non-deterministic state transitions introduced.
One of the first real applications of the ACO framework to optimization problems
in continuous search spaces is described in [14] and [15]. An earlier application of
the ant metaphor to continuous optimization appears in [16], with more recent work
like the Aggregation Pheromones System in [17] and the Differential Ant-Stigmergy
Algorithm in [18]. [19] is the first work linking ACO to optimal control. Although
presenting a formal framework, called ant programming, no application, or study

Ant Colony Learning Algorithm for Optimal Control 3
of its performance is presented. Our algorithm shares some similarities with the
Q-learning algorithm. Earlier work [20] introduced the Ant-Q algorithm, which is
the most notable other work relating ACO with Q-learning. However, Ant-Q has
been developed for combinatorial optimization problems and not to optimal control
problems. Because of this difference, ACL is novel in all major structural aspects of
the Ant-Q algorithm, namely the choice of the action selection method, the absence
of the heuristic variable, and the choice of the set of ants used in the update. There
are only a few publications that combine ACO with the concept of fuzzy control
[21, 22, 23]. In all three publications fuzzy controllers are obtained using ACO,
rather than developing an actual fuzzy ACO algorithm, as introduced in this paper.
This chapter is structured as follows. In Section 2, the ACO heuristic is reviewed
with special attention paid to the Ant System and the Ant Colony System, which are
among the most popular ACO algorithms. Section 3 presents the general layout of
ACL, with in more detail its crisp and fuzzy version. Section 4 presents the appli-
cation of both ACL algorithms on the control problem of two-dimensional vehicle
navigation in an environment with a variable damping profile. The learning perfor-
mance of Crisp and Fuzzy ACL is studied using of a set of performance measures
and the resulting policies are compared to an optimal policy obtained by the fuzzy
Q-iteration algorithm from [24]. Section 5 concludes this chapter and presents and
outline for future research.
2 Ant Colony Optimization
This section presents the preliminaries for understanding the ACL algorithm. It
presents the framework of all ACO algorithms in Section 2.1. The Ant System,
which is the most basic ACO algorithm, is discussed in Section 2.2 and the Ant
Colony System, which is slightly more advanced compared to the Ant System, is
discussed in Section 2.3. ACL is based on these two algorithms.
2.1 ACO Framework
ACO algorithms have been developed to solve hard combinatorial optimization
problems [1]. A combinatorial optimization problem can be represented as a tu-
ple P = 〈S, F 〉, where S is the solution space with s ∈ S a specific candidate
solution and where F : S → R+ is a fitness function assigning strictly positive val-
ues to candidate solutions, where higher values correspond to better solutions. The
purpose of the algorithm is to find a solution s∗ ∈ S , or a set of solutions S∗ ⊆ Sthat maximize the fitness function. The solution s∗ is then called an optimal solution
and S∗ is called the set of optimal solutions.
In ACO, the combinatorial optimization problem is represented by a graph con-
sisting of a set of vertices and a set of arcs connecting the vertices. A particular

4 Jelmer Marinus van Ast, Robert Babuska, and Bart De Schutter
solution s is a concatenation of solution components (i, j), which are pairs of ver-
tices i and j connected by the arc ij. The concatenation of solution components
forms a path from the initial vertex to the terminal vertex. This graph is called the
construction graph, as the solutions are constructed incrementally by moving over
the graph. How the terminal vertices are defined depends on the problem consid-
ered. For instance, in the traveling salesman problem1, there are multiple terminal
vertices, namely for each ant the terminal vertex is equal to its initial vertex, after
visiting all other vertices exactly once. For the application to control problems, as
considered in this chapter, the terminal vertex corresponds to the desired state of the
system. Two values are associated with the arcs: a pheromone trail variable τij and a
heuristic variable ηij . The pheromone trail represents the acquired knowledge about
the optimal solutions over time and the heuristic variable provides a priori informa-
tion about the quality of the solution component, i.e., the quality of moving from
vertex i to vertex j. In the case of the traveling salesman problem, the heuristic vari-
ables typically represent the inverse of the distance between the respective pair of
cities. In general, a heuristic variable represents a short-term quality measure of the
solution component, while the task is to acquire a concatenation of solution com-
ponents that overall form an optimal solution. A pheromone variable, on the other
hand, encodes the measure of the long-term quality of concatenating the respective
solution components.
2.2 The Ant System
The most basic ACO algorithm is called the Ant System (AS) [25] and works as
follows. A set of M ants is randomly distributed over the vertices. The heuristic
variables ηij are set to encode the prior knowledge by favoring the choice of some
vertices over others. For each ant c, the partial solution sp,c is initially empty and all
pheromone variables are set to some initial value τ0 > 0. In each iteration, each ant
decides based on some probability distribution, which solution component (i, j) to
add to its partial solution sp,c. The probability pc{j|i} for an ant c on a vertex i to
move to a vertex j within its feasible neighborhood Ni,c is defined as:
pc{j|i} =ταijη
βij
∑
l∈Ni,cταilη
βil
, ∀j ∈ Ni,c, (1)
with α ≥ 1 and β ≥ 1 determining the relative importance of ηij and τij respec-
tively. The feasible neighborhood Ni,c of an ant c on a vertex i is the set of not yet
visited vertices that are connected to i. By moving from vertex i to vertex j, ant
1 In the traveling salesman problem, there is a set of cities connected by roads of different lengths
and the problem is to find the sequence of cities that takes the traveling salesman to all cities,
visiting each city exactly once and bringing him back to its initial city with a minimum length of
the tour.

Ant Colony Learning Algorithm for Optimal Control 5
c adds the associated solution component (i, j) to its partial solution sp,c until it
reaches its terminal vertex and completes its candidate solution.
The candidate solutions of all ants are evaluated using the fitness function F (s)and the resulting value is used to update the pheromone levels by:
τij ← (1− ρ)τij +∑
s∈Supd
∆τij(s), (2)
with ρ ∈ (0, 1) the evaporation rate and Supd the set of solutions that are eligible to
be used for the pheromone update, which will be explained further on in this section.
This update step is called the global pheromone update step. The pheromone deposit
∆τij(s) is computed as:
∆τij(s) =
{
F (s) , if (i, j) ∈ s0 , otherwise.
The pheromone levels are a measure of how desirable it is to add the asso-
ciated solution component to the partial solution. In order to incorporate forget-
ting, the pheromone levels decrease by some factor in each iteration. This is called
pheromone evaporation in correspondence to the physical evaporation of the chemi-
cal pheromones for real ant colonies. By evaporation, it can be avoided that the algo-
rithm prematurely converges to suboptimal solutions. Note that in (2) the pheromone
level on all vertices is evaporated and only those vertices that are associated with the
solutions in the update set receive a pheromone deposit.
In the following iteration, each ant repeats the previous steps, but now the
pheromone levels have been updated and can be used to make better decisions about
which vertex to move to. After some stopping criterion has been reached, the values
of τ and η on the graph encode the solution for all (i, j)-pairs. This final solution
can be extracted from the graph as follows:
(i, j) : j = argmaxl
(ταilηβil), ∀i.
Note that all ants are still likely to follow suboptimal trajectories through the
graph, thereby exploring constantly the solution space and keeping the ability to
adapt the pheromone levels to changes in the problem structure.
There exist various rules to construct Supd, of which the most standard one is
to use all the candidate solutions found in the trial. This update set is then called:
Strial2. This update rule is typical for the Ant System. However, other update rules
have shown to outperform the AS update rule in various combinatorial optimization
2 In ACO literature, the term trial is seldom used. It is rather a term from the reinforcement learning
(RL) community [26]. In our opinion it is also a more appropriate term for ACO, especially in the
setting of optimal control, and we will use it to denote the part of the algorithm from the initial-
ization of the ants over the state space until the global pheromone update step. The corresponding
term for a trial in the ACO literature is iteration and the set of all candidate solutions found in
each iteration is denoted as Siter. In this chapter, equivalently to RL, we prefer to use the word
iteration to indicate one step of feeding an input to the system and measuring its state. In Figure 2,

6 Jelmer Marinus van Ast, Robert Babuska, and Bart De Schutter
problems. Rather than using the complete set of candidate solutions from the last
trial, either the best solution from the last trial, or the best solution since the ini-
tialization of the algorithm can be used. The former update rule is called Iteration
Best in the literature (which should be called Trial Best in our terminology), and the
latter is called Best-So-far, or Global Best in the literature [1]. These methods result
in a strong bias of the pheromone trail reinforcement towards solutions that have
been proven to perform well and additionally reduce the computational complexity
of the algorithm. As the risk exists that the algorithm prematurely converges to sub-
optimal solutions, these methods are only superior to AS if extra measures are taken
to prevent this, such as the local pheromone update rule, explained in Section 2.3.
Two of the most successful ACO variants in practice that implement the update rules
mentioned above, are the Ant Colony System [27] and theMAX -MIN Ant Sys-
tem [28]. Because of its relation to ACL, we will explain the Ant Colony System
next.
2.3 The Ant Colony System
The Ant Colony System (ACS) [27] is an extension to the AS and is one of the
most successful and widely used ACO algorithms. There are four main differences
between the AS and the ACS:
1. The ACS uses the global-best update rule in the global pheromone update step.
This means that only the one solution that has been found since the start of the
algorithm that has the highest fitness, called sgb is used to update the pheromone
variables at the end of the trial. This is a form of elitism in ACO algorithms that
has shown to significantly speed up the convergence to the optimal solution.
2. The global pheromone update is only performed for the (i, j)-pairs that are an
element of the global best solution. This means that not all pheromone levels are
evaporated, as with the AS, but only those that also receive a pheromone deposit.
3. The pheromone deposit is weighted by ρ. As a result of this and the previous two
differences, the global pheromone update rule is:
τij ←
{
(1− ρ)τij + ρ∆τij(sgb) , if (i, j) ∈ sgbτij , otherwise.
4. An important element from the ACS algorithm that acts as a measure to avoid
premature convergence to suboptimal solutions is the local pheromone update
step, which occurs for each ant after each iteration within a trial and is defined as
follows:
τij(κ+ 1) = (1− γ)τij(κ) + γτ0, (3)
everything that happens in the outer loop is the trial and the inner loops represent the iterations for
all ants in parallel.

Ant Colony Learning Algorithm for Optimal Control 7
where γ ∈ (0, 1) is a small parameter similar to ρ, ij is the index corresponding
to the (i, j)-pair just added to the partial solution, and τ0 is the initial value of
the pheromone trail. The effect of (3) is that during the trial, the visited solution
components are made less attractive for other ants to take, in that way promoting
the exploration of other, less frequently visited, solution components.
5. There is an explicit exploration-exploitation step with the selection of the next
node j, where with a probability of ǫ, j is chosen as being the node with the
highest value of ταijηβij (exploitation) and with the probability (1 − ǫ), a random
action is chosen according to (1) (exploration).
The Ant Colony Learning algorithm, which is presented next, is based on the AS
combined with the local pheromone update step from the ACS algorithm.
3 Ant Colony Learning
This section presents the Ant Colony Learning (ACL) class of algorithms. First, in
Section 3.1 the optimal control problem for which ACL has been developed is intro-
duced. Section 3.2 presents the general layout of ACL. ACL with crisp state space
partitioning is presented in Section 3.3 and the fuzzy variant in Section 3.4. Re-
garding the practical application of ACL, Section 3.5 discusses ways of setting the
parameters from the algorithm and Section 3.6 presents a discussion on the relation
of ACL to reinforcement learning.
3.1 The Optimal Control Problem
Assume that we have a nonlinear dynamic system, characterized by a continuous-
valued state vector x =[
x1 x2 . . . xn
]T∈ X ⊆ R
n, with X the state space and
n the order of the system. Also assume that the state can be controlled by an input
u ∈ U that can only take a finite number of values and that the state can be measured
at discrete time steps, with a sample time Ts with k the discrete time index. The
sampled system is denoted as:
x(k + 1) = f(x(k),u(k)). (4)
The optimal control problem is to control the state of the system from any given
initial state x(0) = x0 to a desired goal state x(K) = xg in at most K steps and in
an optimal way, where optimality is defined by minimizing a certain cost function.
As an example, take the following quadratic cost function:
J(s) = J(x, u) =
K−1∑
k=0
eT(k + 1)Qe(k + 1) + uT(k)Ru(k), (5)

8 Jelmer Marinus van Ast, Robert Babuska, and Bart De Schutter
with s the solution found by a given ant, x = x(1) . . .x(K) and u = u(0) . . .u(K−1) the sequences of states and actions in that solution respectively, e(k + 1) =x(k + 1) − xg the error at time k + 1, and Q and R positive definite matrices of
appropriate dimensions. The problem is to find a nonlinear mapping from the state
to the input u(k) = g(x(k)) that, when applied to the system in x0 results in a
sequence of state-action pairs (u(0),x(1)), (u(1),x(2)), . . ., (u(K − 1),xg) that
minimizes this cost function. The function g is called the control policy. We make
the assumption that Q and R are selected in such a way that xg is reached in at
most K time steps. The matrices Q and R balance the importance of speed versus
the aggressiveness of the controller. This kind of cost function is frequently used in
optimal control of linear systems, as the optimal controller minimizing the quadratic
cost can be derived as a closed expression after solving the corresponding Riccati
equation using the Q and R matrices and the matrices of the linear state space de-
scription [29]. In our case, we aim at finding control policies for non-linear systems
which in general cannot be derived analytically from the system description and the
Q and R matrices. Note that our method is not limited to the use of quadratic cost
functions.
The control policy we aim to find with ACL will be a state feedback controller.
This is a reactive policy, meaning that it will define a mapping from states to actions
without the need of storing the states (and actions) of previous time steps. This poses
the requirement on the system that it can be described by a state-transition mapping
for a quantized state q and an action (or input) u in discrete time as follows:
q(k + 1) ∼ p(q(k),u(k)), (6)
with p a probability distribution function over the state-action space. In this case,
the system is said to be a Markov Decision Process (MDP) and the probability dis-
tribution function p is said to be the Markov model of the system. Note that finding
an optimal control policy for an MDP is equivalent to finding the optimal sequence
of state-action pairs from any given initial state to a certain goal state, which is a
combinatorial optimization problem. When the state transitions are stochastic, like
in (6), it is a stochastic combinatorial optimization problem. As ACO algorithms
are especially applicable to (stochastic) combinatorial optimization problems, the
application of ACO to deriving control policies is evident.
3.2 General Layout of ACL
ACL can be categorized as a model-free learning algorithm, as the ants do not have
direct access to the model of the system and must learn the control policy just by
interacting with it. Note that as the ants interact with the system in parallel, the
implementation of this algorithm to a real system requires multiple copies of this
system, one for each ant. This hampers the practical applicability of the algorithm

Ant Colony Learning Algorithm for Optimal Control 9
to real systems. However, when a model of the real system is available, the paral-
lelism can take place in software. In that case, the learning happens off-line and after
convergence, the resulting control policy can be applied to the real system. In prin-
ciple, the ants could also interact with one physical system, but this would require
either a serial implementation in which each ant performs a trial and the global
pheromone update takes place after the last ant has completed its trial, or a serial
implementation in which each ant only performs a single iteration, after which the
state of the system must be reinitialized for the next ant. In the first case, the local
pheromone update will lose most of its use, while in the second case, the repetitive
reinitializations will cause a strong increase of simulation time and heavy load on
the system. In either case, the usefulness of ACL will be heavily compromised.
An important consideration for an ACO approach to optimal control is which set
of solutions to use in the global pheromone update step. When using the Global Best
pheromone update rule in an optimal control problem, all ants have to be initialized
to the same state, as starting from states that require less time and less effort to reach
the goal would always result in a better Global Best solution. Ultimately, initializing
an ant exactly in the goal state would be the best possible solution and no other
solution, starting from more interesting states would get the opportunity to update
the pheromones in the global pheromone update phase. In order to find a control
policy from any initial state to the goal state, the Global Best update rule cannot be
used. By simply using all solutions of all ants in the updating, like in the original AS
algorithm, the resulting algorithm does allow for random initialization of the ants
over the state space and is therefore used in ACL.
3.3 ACL with Crisp State Space Partitioning
For a system with a continuous-valued state space, optimization algorithms like
ACO can only be applied if the state space is quantized. The most straightforward
way to do this is to divide the state space into a finite number of bins, such that each
state value is assigned to exactly one bin. These bins can be enumerated and used as
the vertices in the ACO construction graph.
3.3.1 Crisp State Space Partitioning
Assume a continuous-time, continuous-state system sampled with a sample time Ts.
In order to apply ACO, the state x must be quantized into a finite number of bins
to get the quantized state q. Depending on the sizes and the number of these bins,
portions of the state space will be represented with the same quantized state. One
can imagine that applying an input to the system that is in a particular quantized
state results in the system to move to a next quantized state with some probability.
In order to illustrate these aspects of the quantization, we consider the continuous
model to be cast as a discrete stochastic automaton. An automaton is defined by the

10 Jelmer Marinus van Ast, Robert Babuska, and Bart De Schutter
triple Σ = (Q,U , φ), with Q a finite or countable set of discrete states, U a finite
or countable set of discrete inputs, and φ : Q × U × Q → [0, 1] a state transition
function.
Given a discrete state vector q ∈ Q, a discrete input symbol u ∈ U , and a
discrete next state vector q′ ∈ Q, the (Markovian) state transition function φ defines
the probability of this state transition, φ(q,u,q′), making the automaton stochastic.
The probabilities over all states q′ must each sum up to one for each state-action pair
(q,u). An example of a stochastic automaton is given in Figure 1. In this figure, it
is clear that, e.g., applying an action u = 1 to the system in q = 1 can move the
system to a next state that is either q′ = 1 with a probability of 0.2, or q′ = 2 with a
probability of 0.8.
φ(q = 2, u = 1, q′ = 2) = 1
q = 2q = 1
φ(q = 1, u = 1, q′ = 1) = 0.2
φ(q = 2, u = 2, q′ = 2) = 0.1φ(q = 1, u = 2, q′ = 1) = 1
φ(q = 1, u = 1, q′ = 2) = 0.8
φ(q = 2, u = 2, q′ = 1) = 0.9
Fig. 1 An example of a stochastic automaton.
The probability distribution function determining the transition probabilities re-
flects the system dynamics and the set of possible control actions is reflected in the
structure of the automaton. The probability distribution function can be estimated
from simulations of the system over a fine grid of pairs of initial states and inputs,
but for the application of ACL, this is not necessary. The algorithm can directly in-
teract with the continuous-state dynamics of the system, as will be described in the
following section.
3.3.2 Crisp ACL Algorithm
At the start of every trial, each ant is initialized with a random continuous-valued
state of the system. This state is quantized ontoQ. Each ant has to choose an action
and add this state-action pair to its partial solution. It is not known to the ant to
which state this action will take him, as in general there is a set of next states to
which the ant can move, according to the system dynamics.
No heuristic values are associated with the vertices, as we assume in this chapter
that no a priori information is available about the quality of solution components.
This is implemented by setting all heuristic values equal to one. It can be seen that

Ant Colony Learning Algorithm for Optimal Control 11
ηij disappears from (1) in this case. Only the value of α remains as a tuning pa-
rameter, now in fact only determining the amount of exploration as higher values
of α make the probability higher for choosing the action associated with the largest
pheromone level. In the ACS, there is an explicit exploration-exploitation step when
the next node j associated with the highest value of ταijηβij is chosen with some
probability ǫ (exploitation) and a random node is chosen with the probability (1−ǫ)according to (1) (exploration). In our algorithm, as we do not have the heuristic fac-
tor ηij , the amount of exploration over exploitation can be tuned by the variable α.
For this reason, we do not include an explicit exploration-exploitation step based on
ǫ. Without this and without the heuristic factor, the algorithm needs less tuning and
is easier to apply.
Action Selection
The probability of an ant c to choose an action u when in a state qc is:
pc{u|qc} =ταqcu
∑
l∈Uqcταqcl
, (7)
where Uqcis the action set available to ant c in state qc.
Local Pheromone Update
The pheromones are initialized equally for all vertices and set to a small positive
value τ0. During every trial, all ants construct their solutions in parallel by interact-
ing with the system until they either have reached the goal state, or the trial exceeds
a certain pre-specified number of iterations Kmax. After every iteration, the ants
perform a local pheromone update, equal to (3), but in the setting of Crisp ACL:
τqcuc(k + 1)← (1− γ)τqcuc
(k) + γτ0. (8)
Global Pheromone Update
After completion of the trial, the pheromone levels are updated according to the
following global pheromone update step:
τqu(κ+ 1)←(1− ρ)τqu(κ) (9)
+ ρ∑
s∈Strial;(q,u)∈s
J−1(s), ∀(q,u) : ∃s ∈ Strial; (q,u) ∈ s, (10)
with Strial the set of all candidate solutions found in the trial and κ the trial counter.
This type of update rule is comparable to the AS update rule, with the important
difference that only the pheromone levels are evaporated that are associated with
the elements in the update set of solutions. The pheromone deposit is equal to
J−1(s) = J−1(q, u), the inverse of the cost function over the sequence of quan-
tized state-action pairs in s according to (5).
The complete algorithm is given in Algorithm 1. In this algorithm the assignment
xc ← random(X ) in Step 7 selects for ant c a random state xc from the state space

12 Jelmer Marinus van Ast, Robert Babuska, and Bart De Schutter
X with a uniform probability distribution. The assignment qc ← quantize(xc) in
Step 9 quantizes for ant c the state xc into a quantized state qc using the prespecified
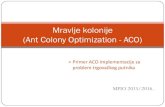
quantization bins fromQ. A flow diagram of the algorithm is presented in Figure 2.
In this figure, everything that happens in the outer loop is the trial and the inner
loops represent the iterations for all ants in parallel.
Algorithm 1 The Ant Colony Learning algorithm for optimal control problems.
Input: Q,U ,X , f ,M, τ0, ρ, γ, α,Kmax, κmax
1: κ← 02: τqu ← τ0, ∀(q,u) ∈ Q× U3: repeat
4: k ← 0; Strial ← ∅5: for all ants c in parallel do
6: sp,c ← ∅7: xc ← random(X )8: repeat
9: qc ← quantize(xc)
10: uc ∼ pc{u|qc} =ταqcu∑
l∈Uqcταqcl
, ∀u ∈ Uqc
11: sp,c ← sp,c
⋃{(qc,uc)}
12: xc(k + 1)← f(xc(k),uc)13: Local pheromone update:
τqcuc(k + 1)← (1− γ)τqcuc
(k) + γτ014: k ← k + 115: until k = Kmax
16: Strial ← Strial⋃{sp,c}
17: end for
18: Global pheromone update:
τqu(κ+1)← (1−ρ)τqu(κ)+ρ∑
s∈Strial;(q,u)∈s
J−1(s), ∀(q,u) : ∃s ∈ Strial; (q,u) ∈ s
19: κ← κ+ 120: until κ = κmax
Output: τqu, ∀(q,u) ∈ Q× U
3.4 ACL with Fuzzy State Space Partitioning
The number of bins required to accurately capture the dynamics of the original sys-
tem may become very large even for simple systems with only two state variables.
Moreover, the time complexity of ACL grows exponentially with the number of
bins, making the algorithm infeasible for realistic systems. In particular, note that
for systems with fast dynamics in certain regions of the state space, the sample time
needs to be chosen smaller in order to capture the dynamics in these regions ac-
curately. In other regions of the state space where the dynamics of the system are
slower, the faster sampling requires a denser quantization, increasing the number
of bins. All together, without much prior knowledge of the system dynamics, both

Ant Colony Learning Algorithm for Optimal Control 13
START
k = Kmax?
InitializeTrial (1-2)
InitializeIteration (4)
InitializeAnt (6-7)
ChooseAction (9-11)
Apply Actionto System (12)
Local PheromoneUpdate (13)
k ← k + 1
k = Kmax?
InitializeAnt (6-7)
ChooseAction (9-11)
Apply Actionto System (12)
Local PheromoneUpdate (13)
k ← k + 1
UpdateStrial (16)
Global PheromoneUpdate (18)
κ← κ + 1
κ = κmax?
END
ForM
antsin
parallel
YES YES
NO NO
NO
YES
Fig. 2 Flow diagram of the Ant Colony Learning algorithm for optimal control problems. The
numbers between parentheses refer to the respective lines of Algorithm 1.

14 Jelmer Marinus van Ast, Robert Babuska, and Bart De Schutter
the sampling time and the bin size need to be small enough, resulting in a rapid
explosion of the number of bins.
A much better alternative is to approximate the state space by a parametrized
function approximator. In that case, there is still a finite number of parameters, but
this number can typically be chosen to be much smaller compared to using crisp
quantization. The universal function approximator that is used in this chapter is the
fuzzy approximator.
3.4.1 Fuzzy State Space Partitioning
With fuzzy approximation, the domain of each state variable is partitioned using
membership functions. We define the membership functions for the state variables
to be triangular-shaped, such that the membership degrees for any value of the state
on the domain always sum up to one. Only the centers of the membership functions
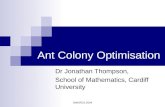
have to be stored. An example of such a fuzzy partitioning is given in Figure 3.4.1.
0
1
a1 a2 a3 a4 a5
A1 A2 A3 A4 A5
x
µ
Fig. 3 Membership functions A1, . . . A5, with centers a1, . . . , a5 on an infinite domain.
Let Ai denote the membership functions for x1, with ai their centers for i =1, . . . , NA, with NA the number of membership functions for x1. Similarly for x2,
denote the membership functions by Bi, with bi their centers for i = 1, . . . , NB ,
with NB the number of membership functions for x2. Similarly, the membership
functions can be defined for the other state variables in x, but for the sake of nota-
tion, the discussion in this chapter limits the number to two, without loss of gener-
ality. Note that in the example in Section 4, the order of the system is four.
The membership degree of Ai and Bi are respectively denoted by µAi(x1(k))
and µBi(x2(k)) for a specific value of the state at time k. The degree of fulfillment
is computed by multiplying the two membership degrees:
βij(x(k)) = µAi(x1(k)) · µBj
(x2(k)).
Let the vector of all degrees of fulfillment for a certain state at time k be denoted
by:

Ant Colony Learning Algorithm for Optimal Control 15
β(x(k)) =[β11(x(k)) β12(x(k)) . . . β1NB(x(k))
β21(x(k)) β22(x(k)) . . . β2NB(x(k))
. . . βNANB(x(k))]T, (11)
which is a vector containing βij for all combinations of i and j. Each element will
be associated to a vertex in the graph used by Fuzzy ACL. Most of the steps taken
from the AS and ACS algorithms for dealing with the β(x(k)) vectors from (11)
need to be reconsidered. This is the subject of the following section.
3.4.2 Fuzzy ACL Algorithm
In the crisp version of ACL, all combinations of these quantized states for the differ-
ent state variables corresponded to the nodes in the graph and the arcs corresponded
to transitions from one quantized state to another. Because of the quantization, the
resulting system was transformed into a stochastic decision problem. However, the
pheromones were associated to these arcs as usual. In the fuzzy case, the state space
is partitioned by membership functions and the combination of the indices to these
membership functions for the different state variables correspond to the nodes in the
construction graph. With the fuzzy interpolation, the system remains a deterministic
decision problem, but the transition from node to node now does not directly corre-
spond to a state transition. The pheromones are associated to the arcs as usual, but
the updating needs to take into account the degree of fulfillment of the associated
membership functions.
In Fuzzy ACL, which we have introduced in [12], an ant is not assigned to a
certain vertex at a certain time, but to all vertices according to some degree of ful-
fillment at the same time. For this reason, a pheromone τij is now denoted as τiuwith i the index of the vertex (i.e. the corresponding element of β) and u the action.
Similar to the definition of the vector of all degrees of fulfillment in (11), the vector
of all pheromones for a certain action u at time k is denoted as:
τu(k) =[
τ1u(k) τ2u(k) . . . τNANBu(k)]T
. (12)
Action Selection
The action is chosen randomly according to the probability distribution:
pc{u|βc(k)}(k) =NANB∑
i=1
βc,i(k)ταi,u(k)
∑
ℓ∈U ταi,ℓ(k). (13)
Note that when βc contains exactly one 1 and for the rest only zeros, this would
correspond to the crisp case, where the state is quantized to a set of bins and (13)
then reduces to (7).

16 Jelmer Marinus van Ast, Robert Babuska, and Bart De Schutter
Local Pheromone Update
The local pheromone update from (3) can be modified to the fuzzy case as follows:
τu ←τu(1− β) + ((1− γ)τu + γτ0)β
= τu(1− γβ) + τ0(γβ), (14)
where all operations are performed element-wise.
As all ants update the pheromone levels associated with the state just visited and
the action just taken in parallel, one may wonder whether or not the order in which
the updates are done matters, when the algorithm is executed on a standard CPU,
where all operations are done in series. With crisp quantization, the ants may indeed
sometimes visit the same state and with fuzzy quantization, the ants may very well
share some of the membership functions with a membership degree larger than zero.
We will show that in both cases, the order of updates in series does not influence
the final value of the pheromones after the joint update. In the crisp case, the local
pheromone update from (8) may be rewritten as follows:
τ (1)qu ←(1− γ)τqu + γτ0
= (1− γ)(τqu − τ0) + τ0.
Now, when a second ant updates the same pheromone level τqu, the pheromone
level becomes:
τ (2)qu ←(1− γ)(τ (1)qu − τ0) + τ0
= (1− γ)2(τqu − τ0) + τ0.
After n updates, the pheromone level is:
τ (n)qu ← (1− γ)n(τqu − τ0) + τ0, (15)
which shows that the order of the update is of no influence to the final value of the
pheromone level.
For the fuzzy case a similar derivation can be made. In general, after all the ants
have performed the update, the pheromone vector is:
τu ←
(
M∏
c=1
(1− γβc)
)
(τu − τ0) + τ0, (16)
where again all operations are performed element-wise. This result also reveals that
the final values of the pheromones are invariant with respect to the order of updates.
Furthermore, also note that when βc contains exactly one 1 and for the rest only ze-
ros, corresponding to the crisp case, the fuzzy local pheromone update from either
(14) or (16) reduces to the crisp case in respectively (8) or (15).

Ant Colony Learning Algorithm for Optimal Control 17
Global Pheromone Update
In order to derive a fuzzy representation of the global pheromone update step it is
convenient to rewrite (10) using indicator functions:
τqu(κ+ 1)←
(1− ρ)τqu(κ) + ρ∑
s∈Supd
J−1(s)Iqu,s
Iqu,Supd
+ τqu(κ)(1− Iqu,Supd). (17)
In (17), Iqu,Supdis an indicator function that can take values from the set {0, 1}
and is equal to 1 when (q,u) is an element of a solution belonging to the set Supdand 0 otherwise. Similarly, Iqu,s is an indicator function as well, and it is equal to
1 when (q,u) is an element of the solutions s and 0 otherwise.
Now, by using the vector of pheromones from (12), we introduce the vector in-
dicator function Iu,s, being a vector of the same size as τu, with elements from
the set {0, 1} and for each state indicating whether it is an element of s. A similar
vector indicator function Iu,Strialis introduced as well. Using these notations, we
can write (17) for all states q together as:
τu(κ+ 1)←
(1− ρ)τu(κ) + ρ∑
s∈Supd
J−1(s)Iu,s
Iu,Supd
+ τu(κ)(1− Iu,Supd), (18)
where all multiplications are performed element-wise.
The most basic vector indicator function is Iu,s(i) , which has only one ele-
ment equal to 1, namely the one for (q,u) = s(i). Recall that a solution s ={s(1), s(2), . . . , s(Ns)} is an ordered set of solution components s(i) = (qi,ui).Now, Iu,s can be created by taking the union of all Iu,s(i) :
Iu,s = Iu,s(1) ∪ Iu,s(2) ∪ . . . ∪ Iu,s(Ns) =
Ns⋃
i=1
Iu,s(i) , (19)
where we define the union of indicator functions in the light of the fuzzy represen-
tation of the state by a fuzzy union set operator, such as:
(A ∪B)(x) = max[µA(x), µB(x)]. (20)
In this operator, where A and B are membership functions, x a variable and µA(x)the degree to which x belongs to A. Note that when A maps x to a crisp domain
{0, 1}, the union operator is still valid. Similar to (19), if we denote the set of so-
lutions as the ordered set of solutions Supd = {s1, s2, . . . , sNS}, Iu,Strial
can be
created by taking the union of all Iu,s:

18 Jelmer Marinus van Ast, Robert Babuska, and Bart De Schutter
Iu,Strial= Iu,s1 ∪ Iu,s2 ∪ . . . ∪ Iu,sNS
=
NS⋃
i=1
Iu,si . (21)
In fact, Iu,si can be regarded as a representation of the state-action pair (qi,ui).In computer code, Iu,si may be represented by a matrix of dimensions |Q| · |U|containing only one element equal to 1 and the others zero3.
In order to generalize the global pheromone update step to the fuzzy case, realize
that β(x(k)) from (11) can be seen as a generalized (fuzzy, or graded) indicator
function Iu,s(i) , if combined with an action u. The elements of this generalized
indicator function take values in the range [0, 1], for which the extremes 0 and 1
form the special case of the original (crisp) indicator function. We can thus use
the state-action pair where the state has the fuzzy representation of (11) directly to
compose Iu,s(i) . Based on this, we can compose Iu,s and Iu,Strialin the same way
as in (19) and (21) respectively. With the union operator from (20) and the definition
of the various indicator functions, the global pheromone update rule from (18) can
be used in both the crisp and fuzzy variant of ACL.
Note that we need more memory to store the fuzzy representation of the state
compared to its crisp representation. With pair-wise overlapping normalized mem-
bership functions, like the ones shown in Figure 3.4.1, at most 2d elements are
nonzero, with d the dimension of the state space. This means an exponentially
growth in memory requirements for increasing state space dimension, but also that
it is independent of the number of membership functions used for representing the
state space.
As explained in Section 3.2, for optimal control problems, the appropriate update
rule is to use all solutions by all ants in the trial Strial. In the fuzzy case, the solutions
s ∈ Strial consist of sequences of states and actions, and the states can be fuzzified
so that they are represented by sequences of vectors of degrees of fulfillment β.
Instead of one pheromone level, in the fuzzy case a set of pheromone levels are
updated to a certain degree. It can be easily seen that as this update process is just
a series of pheromone deposits, the final value of the pheromone levels relates to
the sum of these deposits and is invariant with respect to the order of these deposits.
This is also the case for this step in Crisp ACL.
Regarding the terminal condition for the ants, with the fuzzy implementation,
none of the vertices can be identified as being the terminal vertex. Rather one has to
define a set of membership functions that can be used to determine to what degree
the goal state has been reached. These membership functions can be used to express
the linguistic fuzzy term of the state being close to the goal. Specifically, this is
satisfied when the membership degree of the state to the membership function with
its core equal to the goal state is larger than 0.5. If this has been satisfied, the ant has
terminated its trial.
3 In MATLAB this may conveniently be represented by a sparse matrix structure, rendering the
indicator-representation useful for generalizing the global pheromone update rule and while still
being a memory efficient representation of the state-action pair.

Ant Colony Learning Algorithm for Optimal Control 19
3.5 Parameter Settings
Some of the parameters in both Crisp and Fuzzy ACL are similarly initialized as
in the ACS. The global and local pheromone trail decay factors are set to a prefer-
ably small value, respectively ρ ∈ (0, 1) and γ ∈ (0, 1). There will be no heuristic
parameter associated to the arcs in the construction graph, so only an exponential
weighting factor for the pheromone trail α > 0 has to be chosen. Increasing α leads
to more biased decisions towards the one corresponding to the highest pheromone
level. Choosing α = 2 or 3 appears to be an appropriate choice. Furthermore, the
control parameters for the algorithm need to be chosen, such as the maximum num-
ber of iterations per trial, Kmax, and the maximum number of trials, Tmax. The latter
one can be set to, e.g., 100 trials, where the former one depends on the sample time
Ts and a guess of the time needed to get from the initial state to the goal optimally,
Tguess. A good choice for Kmax would be to take 10 times the expected number
of iterations, Kmax = 10Tguess/Ts. Specific to ACL, the number and shape of the
membership functions, or the number of quantization bins, and their spacing over
the state domain need to be determined. Furthermore, the pheromones are initial-
ized as τiu = τ0 for all (i,u) in Fuzzy ACL and as τqu = τ0 for all (q,u) in Crisp
ACL and where τ0 is a small, positive value. Finally the number of ants M must
be chosen large enough such that the complete state space can be visited frequently
enough.
3.6 Relation to Reinforcement Learning
In reinforcement learning [26], the agent interacts in a step-wise manner with the
system, experiencing state transitions and rewards. These rewards are a measure of
the short-time quality of the taken decision and the objective for the agent is to cre-
ate a state-action mapping (the policy) that maximizes the (discounted) sum of these
rewards. Particularly in Monte Carlo learning, the agent interacts with the system
and stores the states that it visited and the actions that it took in those states until it
reaches some goal state. Now, its trial ends and the agent evaluates the sequence of
state-action pairs over some cost function and based on that updates a value func-
tion. This value function basically stores the information about the quality of being
in a certain state (or in the Q-learning [30] and SARSA [31] variants, the quality
of choosing a particular action in a certain state). Repeating this procedure of inter-
acting with the system and updating its value function will eventually result in the
value function converging to the optimal value function, which corresponds to the
solution of the control problem. It is said that the control policy has been learned,
because it has been automatically derived purely by interaction with the system.
This procedure shows strong similarities with the procedure of ACL. The main
difference is that rather than a single agent, in ACL there is a multitude of agents
(called ants) all interacting with the system in parallel and all contributing to the
update of the value function (called the set of pheromone levels). For exactly the

20 Jelmer Marinus van Ast, Robert Babuska, and Bart De Schutter
same reason as with reinforcement learning, the procedure in ACL enables the ants
to learn the optimal control policy.
However, as all ants work in parallel, the interaction of all these ants with a single
real world system is problematic. You would require multiple copies of the system
in order to keep up this parallelism. In simulation, this is not an issue. If there is
a model of the real world system available, making many copies of this model in
software is very cheap. Nevertheless, it is not completely correct to call ACL for
this reason a model-based learning algorithm. As the model may be a blackbox
model, with the details unknown to the ants, it is purely a way to benefit from the
parallelism of ACL.
Because of the parallelism of the ants, ACL could be called a multi-agent learn-
ing algorithm. However, this must not be confused with multi-agent reinforcement
learning, as this stands for the setting in which multiple reinforcement learning
agents all act in a single environment according to their own objective and in order
for each of them to behave optimally, they need to take into account the behavior
of the other agents in the environment. Note that in ACL, the ants do not need to
consider, or even notice, the existence of the other ants. All they do is benefit from
each other’s findings.
4 Example: Navigation with Variable Damping
This section presents an example application of both Crisp and Fuzzy ACL to a
continuous-state dynamic system. The dynamic system under consideration is a sim-
ulated two-dimensional (2D) navigation problem and similar to the one described in
[24]. Note that it is not our purpose to demonstrate the superiority of ACL over any
other method for this specific problem. Rather we want to demonstrate the function-
ing of the algorithm and compare the results for both its versions.
4.1 Problem Formulation
A vehicle, modeled as a point-mass of 1 kg, has to be steered to the origin of a
two-dimensional surface from any given initial position in an optimal manner. The
vehicle experiences a damping that varies non-linearly over the surface. The state of
the vehicle is defined as x =[
c1 v1 c2 v2]T
, with c1, c2 and v1, v2 the position and
velocity in the direction of each of the two principal axes respectively. The control
input to the system u =[
u1 u2
]Tis a two-dimensional force. The dynamics are:

Ant Colony Learning Algorithm for Optimal Control 21
x(t) =
0 1 0 00 −b(c1, c2) 0 00 0 0 10 0 0 −b(c1, c2)
x(t) +
0 01 00 00 1
u(t),
where the damping b(c1, c2) in the experiments is modeled by an affine sum of two
Gaussian functions:
b(c1, c2) = b0 +
2∑
i=1
bi exp
−2∑
j=1
(cj −mj,i)2
σ2j,i
,
for which the chosen values of the parameters are b0 = 0.5, b1 = b2 = 8, and
m1,1 = 0, m2,1 = −2.3, σ1,1 = 2.5, σ2,1 = 1.5 for the first Gaussian, and m1,2 =4.7, m2,2 = 1, σ1,2 = 1.5, σ2,2 = 2 for the second Gaussian. The damping profile
can be seen in, e.g., Figure 7, where darker shading means more damping.
4.2 State Space Partitioning and Parameters
The partitioning of the state space is as follows:
• For the position c1: {−5,−3.75,−2,−0.3, 0, 0.3, 2, 2.45, 3.5, 3.75, 4.7, 5} and
for c2: {−5,−4.55,−3.5,−2.3,−2,−1.1,−0.6,−0.3, 0, 0.3, 1, 2.6, 4, 5}.• For the velocity in both dimensions v1, v2: {−2, 0, 2}.
This particular partitioning of the position space is composed of a baseline grid
{−5 − 0.300.35} and adding to it, extra grid lines inside each Gaussian damping
region. This partitioning is identical to what is used in [24]. In the crisp case, the
crossings in the grid are the centers of the quantization bins, where in the fuzzy
case, these are the centers of the triangular membership functions. The action set
contains of 9 actions, namely the cross-product of the sets {−1, 0, 1} for both di-
mensions. The local and global pheromone decay factors are respectively γ = 0.01and ρ = 0.1. Furthermore, α = 3 and the number of ants is 200. The sampling time
is Ts = 0.2 and the ants are randomly initialized over the complete state space at the
start of each trial. An ant terminates its trial when its position and velocity in both
dimensions are within a bound of±0.25 and±0.05 from the goal respectively. Each
experiment is carried out thirty times. The quadratic cost function from (5) is used
with the matrices Q = diag(0.2, 0.1, 0.2, 0.1) and R = 0. The cost function thus
only takes into account the deviation of the state to the goal. We will run the fuzzy
Q-iteration algorithm from [24] for this problem with the same state space parti-
tioning in order to derive the optimal policy to which we can compare the policies
derived by both versions of the ACL algorithm.

22 Jelmer Marinus van Ast, Robert Babuska, and Bart De Schutter
4.3 Results
The first performance measure considered represents the cost of the control policy
as a function of the number of trials. The cost of the control policy is measured as the
average cost of a set of trajectories resulting from simulating the system controlled
by the policy and starting from a set of 100 pre-defined initial states, uniformly
distributed over the state space. Figure 4 shows these plots. As said earlier, each
experiment is carried out thirty times. The black line in the plots is the average
cost over these thirty experiments and the gray area represents the range of costs
for the thirty experiments. From Figure 4 it can be concluded that the Crisp ACL
algorithm does not converge as fast and smoothly compared to Fuzzy ACL and that
it converges to a larger average cost. Furthermore, the gray region for Crisp ACL is
larger than that of Fuzzy ACL, meaning that there is a larger variety of policies that
the algorithm converges to.
0 20 40 60 80 100 120 140 160 1800
50
100
150
200
250
300
350
400
450
500
Trial number [−]
Cost [−
]
(a) Crisp ACL
0 20 40 60 80 100 120 140 160 1800
50
100
150
200
250
300
350
400
450
500
Trial number [−]
Cost [−
]
(b) Fuzzy ACL
Fig. 4 The cost of the control policy as a function of the number of trials passed since the start of
the experiment. The black line in each plot is the average cost over thirty experiments and the gray
area represents the range of costs for these experiments.
The convergence of the algorithm can also be measured by the fraction of quan-
tized states (crisp version), or cores of the membership functions (fuzzy version)
for which the policy has changed at the end of a trial. This measure will be called
the policy variation. The policy variation as a function of the trials for both Crisp
and Fuzzy ACL is depicted in Figure 5. It shows that for both ACL versions, the
policy variation never really becomes completely zero and confirms that Crisp ACL
converges slower compared to Fuzzy ACL. It also provides the insight that although
for Crisp ACL the pheromone levels do not converge to the same value at every run
of the algorithm, they do all converge in about the same way in the sense of policy
variation. This is even more true for Fuzzy ACL, where the gray area around the
average policy variation almost completely disappears for an increasing number of
trials. The observation that the policy variation never becomes completely zero in-

Ant Colony Learning Algorithm for Optimal Control 23
dicates that there are some states for which either action results in nearly the same
cost.
0 20 40 60 80 100 120 140 160 1800
0.1
0.2
0.3
0.4
0.5
0.6
0.7
0.8
0.9
1
Trial number [−]
Po
licy v
aria
tio
n [
−]
(a) Crisp ACL
0 20 40 60 80 100 120 140 160 1800
0.1
0.2
0.3
0.4
0.5
0.6
0.7
0.8
0.9
1
Trial number [−]
Po
licy v
aria
tio
n [
−]
(b) Fuzzy ACL
Fig. 5 Convergence of the algorithm in terms of the fraction of states (cores of the membership
functions, or centers of the quantization bins) for which the policy changed at the end of a trial.
The black line in each plot is the average policy variation over thirty experiments and the gray area
represents the range of policy variation for these experiments.
A third performance measure that is considered represents the robustness of the
control policy. For each state, there is a certain number of actions to choose from.
If the current policy indicates that a certain action is the best, it does not say how
much better it is compared to the second-best action. If it is only a little better, a
small update of the pheromone level for that other action in this state may switch
the policy for this state. In that case, the policy is not considered to be very robust.
The robustness for a certain state is defined as follows:
umax1(q) = argmaxu∈U
(τqu),
umax2(q) = arg maxu∈U\umax1(q)
(τqu),
robustness(q) =ταqumax1(q)
− ταqumax2(q)
ταqumax1(q)
,
where α is the same as the α from the Boltzmann action selection rule ((13) and (7)).
The robustness of the policy is the average robustness over all states. Figure 6 shows
the evolution of the average robustness during the experiments. The figure shows
that the robustness increases with the number of trials, explaining the decrease in the
policy variation from Figure 5. The fact that it does not converge to one explains that
there remains a probability larger than zero for the policy to change. This suggests
that ACL algorithms are potentially capable of adapting the policy to changes in the
cost function, due to changing system dynamics, or a change of the goal state.

24 Jelmer Marinus van Ast, Robert Babuska, and Bart De Schutter
0 20 40 60 80 100 120 140 160 1800
0.1
0.2
0.3
0.4
0.5
0.6
0.7
0.8
0.9
1
Trial number [−]
Ro
bu
stn
ess [
−]
(a) Crisp ACL
0 20 40 60 80 100 120 140 160 1800
0.1
0.2
0.3
0.4
0.5
0.6
0.7
0.8
0.9
1
Trial number [−]
Ro
bu
stn
ess [
−]
(b) Fuzzy ACL
Fig. 6 Evolution of the robustness of the control policy as a function of the number of trials. The
black line in each plot is the average robustness over thirty experiments and the gray area represents
the range of the robustness for these experiments.
Finally, we present the policies and the behavior of a simulated vehicle controlled
by these policies for both Crisp and Fuzzy ACL. In the case of Crisp ACL, Fig-
ure 7(a) depicts a slice of the resulted policy for zero velocity. It shows the mapping
of the positions in both dimensions to the input. Figure 7(b) presents the trajec-
tories of the vehicle for various initial positions and zero initial velocity. In both
−5 −4 −3 −2 −1 0 1 2 3 4 5−5
−4
−3
−2
−1
0
1
2
3
4
5
c1 [m]
c2
[m]
h(c1,0,c
2,0) [Nm]
(a) Crisp ACL: policy
−5 −4 −3 −2 −1 0 1 2 3 4 5−5
−4
−3
−2
−1
0
1
2
3
4
5
c1 [m]
c2 [m
]
(b) Crisp ACL: simulation
Fig. 7 The left figure presents a slice of the best resulting policy for zero velocity obtained by Crisp
ACL in one of the thirty runs. It shows the control input for a fine grid of positions. The multi-
Gaussian damping profile is shown, where darker shades represent regions of more damping. The
figure on the right shows the trajectories of the vehicle under this policy for various initial positions
and zero initial velocity. The markers indicate the positions at twice the sampling time.

Ant Colony Learning Algorithm for Optimal Control 25
figures, the mapping is shown for a grid three times finer than the grid spanned by
the cores of the membership functions. For the crisp case, the states in between the
centers of the partition bins are quantized to the nearest center. Figure 8 presents
the results for Fuzzy ACL. Comparing these results with those from the Crisp ACL
algorithm in Figure 7, it shows that for Crisp ACL, the trajectories of the vehicle
go widely around the regions of stronger damping, in one case (starting from the
top-left corner) even clearly taking a suboptimal path to the goal. For Fuzzy ACL,
the trajectories are very smooth and seem to be more optimal, however the vehicle
does not avoid the regions of stronger damping much. The policy of Fuzzy ACL is
also much more regular compared to the one obtained by Crisp ACL.
−5 −4 −3 −2 −1 0 1 2 3 4 5−5
−4
−3
−2
−1
0
1
2
3
4
5
c1 [m]
c2
[m]
h(c1,0,c
2,0) [Nm]
(a) Fuzzy ACL: policy
−5 −4 −3 −2 −1 0 1 2 3 4 5−5
−4
−3
−2
−1
0
1
2
3
4
5
c1 [m]
c2 [m
]
(b) Fuzzy ACL: simulation
Fig. 8 The left figure presents a slice of the best resulting policy for zero velocity obtained by
Fuzzy ACL in one of the thirty runs. It shows the control input for a fine grid of positions. The
multi-Gaussian damping profile is shown, where darker shades represent regions of more damping.
The figure on the right shows the trajectories of the vehicle under this policy for various initial
positions and zero initial velocity. The markers indicate the positions at twice the sampling time.
In order to verify the optimality of the resulting policies, we also present the
optimal policy and trajectories obtained by the fuzzy Q-iteration algorithm from
[24]. This algorithm is a model-based reinforcement learning method developed for
continuous state spaces and is guaranteed to converge to the optimal policy on the
partitioning grid. Figure 9 present the results for fuzzy Q-iteration. It can be seen
that the optimal policy from fuzzy Q-iteration is very similar to the one obtained by
Fuzzy ACL, but that it manages to avoid the regions of stronger damping somewhat
better. Even with the optimal policy, the regions of stronger damping are not com-
pletely correctly avoided. Especially regarding the policy around the lower damping
region, where it steers the vehicle towards an even stronger damped part of the state
space. The reason for this is the particular choice of the cost function in these ex-
periments. The results in [24] show that for a discontinuous cost function, where

26 Jelmer Marinus van Ast, Robert Babuska, and Bart De Schutter
−5 −4 −3 −2 −1 0 1 2 3 4 5−5
−4
−3
−2
−1
0
1
2
3
4
5
c1 [m]
c2
[m]
h(c1,0,c
2,0) [Nm]
(a) Fuzzy Q-iteration: Policy
−5 −4 −3 −2 −1 0 1 2 3 4 5−5
−4
−3
−2
−1
0
1
2
3
4
5
c1 [m]
c2 [m
]
(b) Fuzzy Q-iteration: simulation
Fig. 9 The baseline optimal policy derived by the fuzzy Q-iteration algorithm. The left figure
presents a slice of the policy for zero velocity. The figure on the right shows the trajectories of the
vehicle under this policy for various initial positions and zero initial velocity. The markers indicate
the positions at twice the sampling time.
reaching the goal results in a sudden and steep decrease in cost, the resulting policy
avoids the highly damped regions much better. Also note that in those experiments,
the policy interpolates between the actions resulting in a much smoother change of
the policy between the centers of the membership functions. Theoretically, Fuzzy
ACL also allows for interpolation of the action set, but this is outside the scope of
this chapter. Also, the ACL framework allows for different cost functions than the
quadratic cost function used in this example. Designing the cost function carefully
is very important for any optimization or control problem and directly influences
the optimal policy. It is however not the purpose of this chapter to find the best cost
function for this particular control problem.
5 Conclusions and Future Work
This chapter has discussed Ant Colony Learning (ACL), a novel method for the de-
sign of optimal control policies for continuous-time, continuous-state dynamic sys-
tems based on Ant Colony Optimization (ACO). The partitioning of the state space
is a crucial aspect to ACL and two versions have been presented with respect to this.
In Crisp ACL, the state space is partitioned using bins, such that each value of the
state maps to exactly one bin. Fuzzy ACL, on the other hand, uses a partitioning of
the state space with triangular membership functions. In this case, each value of the
state maps to the membership functions to a certain membership degree. Both ACL
algorithms are based on the combination of the Ant System and the Ant Colony

Ant Colony Learning Algorithm for Optimal Control 27
System, but have some distinctive characteristics. The action selection step does not
include an explicit probability of choosing the action associated with the highest
value of the pheromone matrix in a given state, but only uses a random-proportional
rule. In this rule, the heuristic variable, typically present in ACO algorithms, is left
out as prior knowledge can also be incorporated through an initial choice of the
pheromone levels. The absence of the heuristic variable makes ACL more straight-
forward to apply. Another particular characteristic of our algorithm is that it uses the
complete set of solutions of the ants in each trial to update the pheromone matrix,
whereas most ACO algorithms typically use some form of elitism, selecting only
one of the solutions from the set of ants to perform the global pheromone update. In
a control setting, this is not possible, as ants initialized closer to the goal will have
experienced a lower cost than ants initialized further away from the goal, but this
does not mean that they must be favored in the update of the pheromone matrix.
The applicability of ACL to optimal control problems with continuous-valued
states is outlined and demonstrated on the non-linear control problem of two-
dimensional navigation with variable damping. The results show convergence of
both the crisp and fuzzy version of the algorithm to suboptimal policies. However,
Fuzzy ACL converged much faster and the cost of its resulting policy did not change
as much over repetitive runs of the algorithm compared to Crisp ACL. It also con-
verged to a more optimal policy than Crisp ACL. We have presented the additional
performance measures of policy variation and robustness in order to study the con-
vergence of the pheromone levels in relation to the policy. These measures showed
that ACL converges as a function of the number of trials to an increasingly robust
control policy meaning that a small change in the pheromone levels will not result in
a large change in the policy. Compared to the optimal policy derived from fuzzy Q-
iteration, the policy from Fuzzy ACL appeared to be close to optimal. It was noted
that the policy could be improved further by choosing a different cost function. In-
terpolation of the action space is another way to get a smoother transition of the
policy between the centers of the state space partitioning. Both these issues were
not considered in more detail in this chapter and we recommend to look further into
this in future research.
The ACL algorithm currently did not incorporate prior knowledge of the system,
or of the optimal control policy. However, sometimes prior knowledge of such kind
is available and using it could be a way to speed up the convergence of the algorithm
and to increase the optimality of the derived policy. Future research must focus on
this issue. Comparing ACL to other related methods, like for instance Q-learning,
is also part of our plans for future research. Finally, future research must focus on a
more theoretical analysis of the algorithm, such as a formal convergence proof.
References
1. M. Dorigo and C. Blum, “Ant colony optimization theory: a survey,” Theoretical Computer
Science, vol. 344, no. 2-3, pp. 243–278, November 2005.

28 Jelmer Marinus van Ast, Robert Babuska, and Bart De Schutter
2. A. Colorni, M. Dorigo, and V. Maniezzo, “Distributed optimization by ant colonies,” in To-
wards a Practice of Autonomous Systems: Proceedings of the First European Conference on
Artificial Life, F. J. Varela and P. Bourgine, Eds. Cambridge, MA: MIT Press, 1992, pp.
134–142.
3. M. Dorigo and T. Stutzle, Ant Colony Optimization. Cambridge, MA, USA: The MIT Press,
2004.
4. K. M. Sim and W. H. Sun, “Ant colony optimization for routing and load-balancing: survey
and new directions,” IEEE Transactions on Systems, Man and Cybernetics, Part A, vol. 33,
no. 5, pp. 560–572, September 2003.
5. R. H. Huang and C. L. Yang, “Ant colony system for job shop scheduling with time windows,”
International Journal of Advanced Manufacturing Technology, vol. 39, no. 1-2, pp. 151–157,
2008.
6. K. Alaykran, O. Engin, and A. Dyen, “Using ant colony optimization to solve hybrid flow
shop scheduling problems,” International Journal of Advanced Manufacturing Technology,
vol. 35, no. 5-6, pp. 541–550, 2007.
7. X. Fan, X. Luo, S. Yi, S. Yang, and H. Zhang, “Optimal path planning for mobile robots
based on intensified ant colony optimization algorithm,” in Proceedings of the IEEE Inter-
national Conference on Robotics, Intelligent Systems and Signal Processing (RISSP 2003),
Changsha, Hunan, China, October 2003, pp. 131–136.
8. J. Wang, E. Osagie, P. Thulasiraman, and R. K. Thulasiram, “HOPNET: A hybrid ant colony
optimization routing algorithm formobile ad hoc network,” Ad Hoc Networks, vol. 7, no. 4,
pp. 690–705, 2009.
9. A. H. Purnamadjaja and R. A. Russell, “Pheromone communication in a robot swarm:
necrophoric bee behaviour and its replication,” Robotica, vol. 23, no. 6, pp. 731–742, 2005.
10. B. Fox, W. Xiang, and H. P. Lee, “Industrial applications of the ant colony optimization
algorithm,” International Journal of Advanced Manufacturing Technology, vol. 31, no. 7-8,
pp. 805–814, 2007.
11. L. Bianchi, M. Dorigo, L. M. Gambardella, and W. J. Gutjahr, “Metaheuristics in stochastic
combinatorial optimization: a survey.” IDSIA, Manno, Switzerland, Tech. Rep. 08, March
2006.
12. J. M. van Ast, R. Babuska, and B. De Schutter, “Novel ant colony optimization approach
to optimal control,” International Journal of Intelligent Computing and Cybernetics, vol. 2,
no. 3, pp. 414 – 434, 2009.
13. ——, “Fuzzy ant colony optimization for optimal control,” in Proceedings of the American
Control Conference (ACC 2009), no. 1003–1008, Saint Louis, MO, USA, June 2009.
14. K. Socha and C. Blum, “An ant colony optimization algorithm for continuous optimiza-
tion: application to feed-forward neural network training,” Neural Computing & Applications,
vol. 16, no. 3, pp. 235–247, May 2007.
15. K. Socha and M. Dorigo, “Ant colony optimization for continuous domains,” European Jour-
nal of Operational Research, vol. 185, no. 3, pp. 1155–1173, 2008.
16. G. Bilchev and I. C. Parmee, “The ant colony metaphor for searching continuous design
spaces,” in Selected Papers from AISB Workshop on Evolutionary Computing, ser. Lecture
Notes in Computer Science, T. Fogarty, Ed., vol. 993. London, UK: Springer-Verlag, April
1995, pp. 25–39.
17. S. Tsutsui, M. Pelikan, and A. Ghosh, “Performance of aggregation pheromone system on
unimodal and multimodal problems,” in Proceedings of the 2005 Congress on Evolutionary
Computation (CEC 2005), September 2005, pp. 880–887.
18. P. Korosec, J. Silc, K. Oblak, and F. Kosel, “The differential ant-stigmergy algorithm: an
experimental evaluation and a real-world application,” in Proceedings of the 2007 Congress
on Evolutionary Computation (CEC 2007), September 2007, pp. 157–164.
19. M. Birattari, G. D. Caro, and M. Dorigo, “Toward the formal foundation of Ant Program-
ming,” in Proceedings of the International Workshop on Ant Algorithms (ANTS 2002). Brus-
sels, Belgium: Springer-Verlag, September 2002, pp. 188–201.

Ant Colony Learning Algorithm for Optimal Control 29
20. L. M. Gambardella and M. Dorigo, “Ant-Q: A reinforcement learning approach to the travel-
ing salesman problem,” in Machine Learning: Proceedings of the Twelfth International Con-
ference on Machine Learning, A. Prieditis and S. Russell, Eds. San Francisco, CA: Morgan
Kaufmann Publishers, 1995, pp. 252–260.
21. J. Casillas, O. Cordn, and F. Herrera, “Learning fuzzy rule-based systems using ant colony
optimization algorithms,” in Proceedings of the ANTS’2000. From Ant Colonies to Artifi-
cial Ants: Second Interantional Workshop on Ant Algorithms. Brussels (Belgium), September
2000, pp. 13–21.
22. B. Zhao and S. Li, “Design of a fuzzy logic controller by ant colony algorithm with applica-
tion to an inverted pendulum system,” in Proceedings of the IEEE International Conference
on Systems, Man and Cybernetics, Taipei, Taiwan, October 2006, pp. 3790–3794.
23. W. Zhu, J. Chen, and B. Zhu, “Optimal design of fuzzy controller based on ant colony algo-
rithms,” in Proceedings of the IEEE International Conference on Mechatronics and Automa-
tion, Luoyang, China, June 2006, pp. 1603–1607.
24. L. Busoniu, D. Ernst, B. De Schutter, and R. Babuska, “Continuous-state reinforcement learn-
ing with fuzzy approximation,” in Adaptive Agents and Multi-Agent Systems III, ser. Lec-
ture Notes in Computer Science, K. Tuyls, A. Nowe, Z. Guessoum, and D. Kudenko, Eds.
Springer, 2008, vol. 4865, pp. 27–43.
25. M. Dorigo, V. Maniezzo, and A. Colorni, “Ant system: optimization by a colony of cooperat-
ing agents,” IEEE Transactions on Systems, Man, and Cybernetics, Part B, vol. 26, no. 1, pp.
29–41, 1996.
26. R. S. Sutton and A. G. Barto, Reinforcement Learning: An Introduction. Cambridge, MA:
MIT Press, 1998.
27. M. Dorigo and L. Gambardella, “Ant Colony System: a cooperative learning approach to the
traveling salesman problem,” IEEE Transactions on Evolutionary Computation, vol. 1, no. 1,
pp. 53–66, 1997.
28. T. Stutzle and U. Hoos, “MAX MIN Ant System,” Journal of Future Generation Computer
Systems, vol. 16, pp. 889–914, 2000.
29. K. J. Astrom and B. Wittenmark, Computer Controlled Systems—Theory and Design. En-
glewood Cliffs, New Jersey: Prentice-Hall, January 1990.
30. C. Watkins and P. Dayan, “Q-learning,” Machine Learning, vol. 8, no. 3-4, pp. 279–292, 1992.
31. G. A. Rummery and M. Niranjan, “On-line q-learning using connectionist systems,” Cam-
bridge University, Tech. Rep. CUED/F-INFENG/TR166, 1994.