Annual Reviews in Control - TUCnlimperis/11.pdfM. Krstic, N. Bekiaris-Liberis/Annual Reviews in...
12
Nonlinear stabilization in infinite dimension q Miroslav Krstic ⇑ , Nikolaos Bekiaris-Liberis Department of Mechanical and Aerospace Engineering, University of California at San Diego, La Jolla, CA 92093, USA article info Article history: Received 23 May 2013 Accepted 31 August 2013 Available online 11 October 2013 abstract Significant advances have taken place in the last few years in the development of control designs for non- linear infinite-dimensional systems. Such systems typically take the form of nonlinear ODEs (ordinary differential equations) with delays and nonlinear PDEs (partial differential equations). In this article we review several representative but general results on nonlinear control in the infinite-dimensional set- ting. First we present designs for nonlinear ODEs with constant, time-varying or state-dependent input delays, which arise in numerous applications of control over networks. Second, we present a design for nonlinear ODEs with a wave (string) PDE at its input, which is motivated by the drilling dynamics in petroleum engineering. Third, we present a design for systems of (two) coupled nonlinear first-order hyperbolic PDEs, which is motivated by slugging flow dynamics in petroleum production in off-shore facilities. Our design and analysis methodologies are based on the concepts of nonlinear predictor feed- back and nonlinear infinite-dimensional backstepping. We present several simulation examples that illustrate the design methodology. Ó 2013 Elsevier Ltd. All rights reserved. 1. Introduction 1.1. Motivation and historical background The area of control design—most notably stabilization—for non- linear finite-dimensional systems reached relative maturity around year 2000. The method of backstepping (Krstic, Kanellako- poulos, & Kokotovic, 1995), which played the central role in this development, particularly for systems with modeling uncertain- ties, then became the tool of interest for stabilization of infinite- dimensional systems. However, for almost a decade, the success in that direction remained limited to linear PDE (partial differential equation) systems (Krstic & Smyshlyaev, 2008). It is not until the last few years that this development has started yielding results for nonlinear infinite-dimensional systems. The turning point in the development of control designs for nonlinear systems was the relatively little known two-part paper by Vazquez and Krstic (2008a, 2008b) where nonlinear infinite- dimensional operators of a Volterra type, with infinite sums of integrals in the spatial variable (rather than in time, as has been common in the input-output representation theory for ODEs for decades), were introduced for stabilization of nonlinear PDEs of the parabolic type. This design represents a proper infinite-dimen- sional extension of backstepping (and feedback linearization) de- signs for nonlinear ODEs. The design involves the construction of the Volterra transformations whose kernel functions depend on increasing numbers of spatial variables (which go to infinity), and where the kernels are governed by PDEs in an increasing num- ber of variables, on domains whose dimension goes to infinity, with the solutions of lower-order kernels being inputs to the PDEs for the higher-order kernels. This complex formulations turns out to be constructive and provably convergent, with a well-defined feedback law and a stability result in spatial norms that are appro- priate for parabolic PDEs. All subsequent backstepping develop- ments for infinite-dimensional nonlinear systems—whether for other PDE systems (Krstic, Magnis, & Vazquez, 2008, 2009) or for nonlinear delay systems (Krstic, 2010a)—are conceptually based on the technique laid out in Vazquez and Krstic (2008a, 2008b), although all such subsequent developments have been much less complex as they have been for less broad classes of nonlinear infi- nite-dimensional systems than parabolic PDEs with right-hand sides that contain spatial Volterra nonlinear operators. Though they carry with them a wealth of mathematical chal- lenges, nonlinear infinite-dimensional systems are not artificial mathematical inventions or esoteric generalizations of nonlinear ODEs. They are as ubiquitous in applications as ODEs. In fact, in numerous problems involving mechanics, fluids, thermal phenom- ena, chemistry, or telecommunications, ODE models are merely approximations of full models that incorporate PDEs and/or delay effects. The most elementary systems in the broad class of nonlinear infinite-dimensional systems are nonlinear systems with input de- lays. They arise in numerous applications such as networked con- trol systems (Cloosterman, van de Wouw, Heemels, & Nijmeijer, 2009; Heemels, Teel, van de Wouw, & Nesic, 2010; Hespanha, 1367-5788/$ - see front matter Ó 2013 Elsevier Ltd. All rights reserved. http://dx.doi.org/10.1016/j.arcontrol.2013.09.002 q An earlier version of this article was presented at the 9th IFAC Symposium on Nonlinear Control Systems, Toulouse, France, September 4–6, 2013. ⇑ Corresponding author. E-mail address: [email protected] (M. Krstic). Annual Reviews in Control 37 (2013) 220–231 Contents lists available at ScienceDirect Annual Reviews in Control journal homepage: www.elsevier.com/locate/arcontrol
Transcript of Annual Reviews in Control - TUCnlimperis/11.pdfM. Krstic, N. Bekiaris-Liberis/Annual Reviews in...

Annual Reviews in Control 37 (2013) 220–231
Contents lists available at ScienceDirect
Annual Reviews in Control
journal homepage: www.elsevier .com/locate /arcontrol
Nonlinear stabilization in infinite dimension q
1367-5788/$ - see front matter � 2013 Elsevier Ltd. All rights reserved.http://dx.doi.org/10.1016/j.arcontrol.2013.09.002
q An earlier version of this article was presented at the 9th IFAC Symposium onNonlinear Control Systems, Toulouse, France, September 4–6, 2013.⇑ Corresponding author.
E-mail address: [email protected] (M. Krstic).
Miroslav Krstic ⇑, Nikolaos Bekiaris-LiberisDepartment of Mechanical and Aerospace Engineering, University of California at San Diego, La Jolla, CA 92093, USA
a r t i c l e i n f o
Article history:Received 23 May 2013Accepted 31 August 2013Available online 11 October 2013
a b s t r a c t
Significant advances have taken place in the last few years in the development of control designs for non-linear infinite-dimensional systems. Such systems typically take the form of nonlinear ODEs (ordinarydifferential equations) with delays and nonlinear PDEs (partial differential equations). In this articlewe review several representative but general results on nonlinear control in the infinite-dimensional set-ting. First we present designs for nonlinear ODEs with constant, time-varying or state-dependent inputdelays, which arise in numerous applications of control over networks. Second, we present a design fornonlinear ODEs with a wave (string) PDE at its input, which is motivated by the drilling dynamics inpetroleum engineering. Third, we present a design for systems of (two) coupled nonlinear first-orderhyperbolic PDEs, which is motivated by slugging flow dynamics in petroleum production in off-shorefacilities. Our design and analysis methodologies are based on the concepts of nonlinear predictor feed-back and nonlinear infinite-dimensional backstepping. We present several simulation examples thatillustrate the design methodology.
� 2013 Elsevier Ltd. All rights reserved.
1. Introduction
1.1. Motivation and historical background
The area of control design—most notably stabilization—for non-linear finite-dimensional systems reached relative maturityaround year 2000. The method of backstepping (Krstic, Kanellako-poulos, & Kokotovic, 1995), which played the central role in thisdevelopment, particularly for systems with modeling uncertain-ties, then became the tool of interest for stabilization of infinite-dimensional systems. However, for almost a decade, the successin that direction remained limited to linear PDE (partial differentialequation) systems (Krstic & Smyshlyaev, 2008). It is not until thelast few years that this development has started yielding resultsfor nonlinear infinite-dimensional systems.
The turning point in the development of control designs fornonlinear systems was the relatively little known two-part paperby Vazquez and Krstic (2008a, 2008b) where nonlinear infinite-dimensional operators of a Volterra type, with infinite sums ofintegrals in the spatial variable (rather than in time, as has beencommon in the input-output representation theory for ODEs fordecades), were introduced for stabilization of nonlinear PDEs ofthe parabolic type. This design represents a proper infinite-dimen-sional extension of backstepping (and feedback linearization) de-signs for nonlinear ODEs. The design involves the construction of
the Volterra transformations whose kernel functions depend onincreasing numbers of spatial variables (which go to infinity),and where the kernels are governed by PDEs in an increasing num-ber of variables, on domains whose dimension goes to infinity,with the solutions of lower-order kernels being inputs to the PDEsfor the higher-order kernels. This complex formulations turns outto be constructive and provably convergent, with a well-definedfeedback law and a stability result in spatial norms that are appro-priate for parabolic PDEs. All subsequent backstepping develop-ments for infinite-dimensional nonlinear systems—whether forother PDE systems (Krstic, Magnis, & Vazquez, 2008, 2009) or fornonlinear delay systems (Krstic, 2010a)—are conceptually basedon the technique laid out in Vazquez and Krstic (2008a, 2008b),although all such subsequent developments have been much lesscomplex as they have been for less broad classes of nonlinear infi-nite-dimensional systems than parabolic PDEs with right-handsides that contain spatial Volterra nonlinear operators.
Though they carry with them a wealth of mathematical chal-lenges, nonlinear infinite-dimensional systems are not artificialmathematical inventions or esoteric generalizations of nonlinearODEs. They are as ubiquitous in applications as ODEs. In fact, innumerous problems involving mechanics, fluids, thermal phenom-ena, chemistry, or telecommunications, ODE models are merelyapproximations of full models that incorporate PDEs and/or delayeffects.
The most elementary systems in the broad class of nonlinearinfinite-dimensional systems are nonlinear systems with input de-lays. They arise in numerous applications such as networked con-trol systems (Cloosterman, van de Wouw, Heemels, & Nijmeijer,2009; Heemels, Teel, van de Wouw, & Nesic, 2010; Hespanha,

M. Krstic, N. Bekiaris-Liberis / Annual Reviews in Control 37 (2013) 220–231 221
Naghshtabrizi, & Xu, 2007; Montestruque & Antsaklis, 2004; Wi-trant, Canudas-de-Wit, Georges, & Alamir, 2007), supply networks(Sipahi, Lammer, Niculescu, & Helbing, 2006; Sterman, 2000), mill-ing processes (Altintas, Engin, & Budak, 1999), irrigation channels(Litrico & Fromion, 2004), engine cooling systems (Hansen, Stoust-rup, & Bendtsen, 2011) and chemical processes (Kravaris & Wright,1989; Mounier & Rudolph, 1998), to name only a few (see also thesurvey by Richard (2003) for additional examples).
Although a nonlinear system with an input delay is as simple aproblem as it gets within the realm of infinite-dimensional nonlin-ear systems, the design of stabilizing control laws for general nonlin-ear systems, such as strict-feedback (Krstic et al., 1995) and strict-feedforward (Krstic, 2004) systems and when the input delay is arbi-trary large, is a highly non-trivial task (Krstic, 2010a). The situation iseven more intricate when the delay is time-varying (Krstic, 2010b;Bekiaris-Liberis & Krstic, 2012), and becomes formidable when thedelay depends on the state of the system itself (Bekiaris-Liberis &Krstic, 2013a). Several additional important results on the stabiliza-tion of nonlinear systems with input and state delays have beendeveloped by Jankovic (2001, 2009), Karafyllis (2006, 2011), Karafyl-lis and Krstic (2012), Mazenc and Bliman (2006), Mazenc, Mondie,and Francisco (2004), and Mazenc and Niculescu (2011).
Once the designer is equipped with the capability to overcome adelay at the input, i.e., the transport PDE process in the actuatorline, there is every reason to ask whether other types of infinite-dimensional dynamics at the input can be compensated. This lineof pursuit for infinite-dimensional dynamics in the actuator lineof a linear ODE plant was pursued by Krstic (2009b) for diffu-sion-dominated (parabolic) actuator dynamics and by Kzrstic(2009c) for wave PDE actuator dynamics. Several extensions, allconsidering linear ODE plants preceded by PDE actuator dynamics,are presented by Bekiaris-Liberis and Krstic (2010), Bekiaris-Liberisand Krstic (2011b), Krstic (2009a), Ren, Wang, and Krstic (2013),Susto and Krstic (2010), and Tang and Xie (2011a, 2011b). Extend-ing those results from the case where the plant is a linear ODE tothe case where the plant is a nonlinear ODE has proved much morechallenging than for the case where the actuator dynamics are ofthe delay (transport PDE) type. Until recently, that is, as we showin this article and discuss next.
A representative engineering application in which wave PDEactuator dynamics are cascaded with a nonlinear ODE is oil dril-ling. A common type of instability in oil drilling is the so-calledstick-slip oscillations (Jansen, 1993). This type of instability (whichis caused by a specific composition of the ground material) resultsin torsional vibrations of the drillstring, which can in turn severelydamage the drilling facilities (see Fig. 1 taken from Sagert, Di Me-glio, Krstic, & Rouchon (2013)). The torsional dynamics of an oil
Fig. 1. A drillstring used in oil drilling. The angular displacement u of the drillstringis controlled through a torque U.
drillstring are modeled as a wave PDE (that describes the dynamicsof the angular displacement of the drillstring) coupled with a non-linear ODE that describes the dynamics of the bottom angularvelocity of the drill bit (Saldivar, Mondie, Loiseau, & Rasvan,2011). A control approach for the bottom angular velocity basedon the linearization of its dynamics is presented in Sagert et al.(2013). In this article we present a design for general nonlinearODE plants with a wave PDE as its actuator dynamics. This designsolves the oil drilling problem (globally) as a special case. We alsospecialize our general design for wave PDE-ODE cascades to thecase of a wave PDE whose uncontrolled end does not drive anODE but is instead governed by a nonlinear Robin boundary condi-tion (a ‘‘nonlinear spring’’, as in the friction law in drilling).
Once PDE-ODE cascades are systematically addressed, it is rea-sonable to ask a question whether interconnections of multiplePDEs can be controlled, and not only in the cascade configurationbut in more general and strongly ‘‘interwoven’’ configurations. Infact, such problems arise in numerous physical systems and havebeen considered in the PDE control literature for at least a decade(as it is explained in the next paragraph), albeit with limitations tothe degree of open-loop instability that is permissible in the plantconsidered.
Systems of coupled, nonlinear first order hyperbolic PDEs modela variety of physical systems. Specifically, 2 � 2 systems of first or-der hyperbolic quasilinear PDEs model processes such as open chan-nels (Dos Santos & Prieur, 2008; Gugat & Leugering, 2003; Gugat,Leugering, & Schmidt, 2004; de Halleux, Prieur, Coron, d’Andréa-No-vel, & Bastin, 2003), transmission lines (Curro, Fusco, & Manganaro,2011), gas flow pipelines (Gugat & Dick, 2011) or road traffic models(Goatin, 2006). They also have some resemblances with systems thatmodel the gas–liquid flow in oil production pipes (see Fig. 2 takenfrom Di Meglio, Krstic, Vazquez, & Petit (2012b)). The problem of sta-bilization for some classes of 2 � 2 systems of first order hyperbolicquasilinear PDEs is considered by Coron, dAndrea-Novel, and Bastin(2006), Dick, Gugat, and Leugering (2010), Dos Santos and Prieur(2008), Greenberg and Li (1984), Gugat and Herty (2011), Prieur(2009), Prieur, Winkin, and Bastin (2008).
1.2. Contents of the article
In this paper we present some recent results on the compensationof input delays in nonlinear systems employing predictor-basedcontrol laws. Predictor feedback was developed originally for unsta-ble linear plants with input delays, see the early paper by Artstein(1982) that conceptualizes the results of the preceding decade gen-eralizes them in several mathematically interesting directions. Yet, anonlinear counterpart of predictor feedback was unavailable untilrecently (Krstic, 2010a). The design by Krstic (2010a) is based on
Liquid
Gas
Pressure sensors Topside
Bottom
Actuator
Fig. 2. An oil production pipe conveying oil and gas from a reservoir.

222 M. Krstic, N. Bekiaris-Liberis / Annual Reviews in Control 37 (2013) 220–231
the introduction of a nonlinear infinite-dimensional backsteppingtransformation, which provides a Lyapunov functional for studyingthe stability of the closed-loop system. Although for linear systemswith a time-varying input delay the formula of the predictor feed-back law was provided by Nihtila (1991), for general nonlinear sys-tems, predictor-based control laws were provided only recently byBekiaris-Liberis and Krstic (2012). One of the most challenging prob-lems in delay systems is the control of systems with state-dependentdelays, as highlighted by Richard (2003). The first systematic ap-proach for designing stabilizing controllers for nonlinear systemswith state-dependent delays was introduced by Bekiaris-Liberisand Krstic (2013a). The design is based on predictor feedback. Thekey challenge that is resolved in Bekiaris-Liberis and Krstic(2013a) is the definition of the predictor state: The state-depen-dence of the delay makes the prediction horizon dependent on fu-ture values of the state which are unavailable.
We also consider finite-dimensional nonlinear plants which arecontrolled through a string and we design a predictor-based feed-back law that compensates the string (wave) dynamics in the inputof the plant. Our design is based on a preliminary transformationwhich allows one to convert the problem of the compensation ofthe wave PDE, to a problem of the compensation of a 2 � 2 systemof first order transport equations which convect in opposite direc-tions (see, for example, Vazquez, Coron, & Krstic, 2011), for an aug-mented (by one integrator) plant. We then introduce the infinite-dimensional backstepping transformations for the two transportstates, which transform the new, augmented system to a targetsystem. With the aid of the backstepping transformations we proveglobal asymptotic stability of the closed-loop system by construct-ing a Lyapunov functional.
Finally, we review some recent results on the local exponentialH2 stabilization of a 2 � 2 system of first order hyperbolic quasilin-ear PDEs using backstepping developed by Coron, Vazquez, Krstic,and Bastin (submitted for publication) and Vazquez, Coron, Krstic,and Bastin (2011). Specifically, we present the design of a controllaw that stabilizes the linearized system using the recently devel-oped backstepping technique of Vazquez et al. (2011) for 2 � 2 sys-tems of linear hyperbolic PDEs (see also Di Meglio, Vazquez, &Krstic (2012a) for an extension to n � n systems). We then provethe local exponential stability of the closed-loop system in the H2
norm by constructing a strict Lyapunov functional with the aid ofthe backstepping transformations.
This paper is an expanded version of Krstic and Bekiaris-Liberis(2013).
1.3. Oganization
Section 2 is devoted to nonlinear systems with input delays. Weintroduce the predictor-based design for constant delays in Sec-tion 2.1 For time-varying delays the predictor feedback design ispresented in Section 2.2. State-dependent delays are treated in Sec-tion 2.3. In Section 3 we present a design that compensates thewave actuator dynamics in nonlinear systems. In Section 4 weare dealing with a 2 � 2 system of first order quasilinear PDEs forwhich we design a control law that achieves local exponentialstability.
1 The quantities P in (3) and P in (7) are identical. However, we use two distinctmbols for the same quantity because, in one case, P is expressed in terms of X and U,r the direct backstepping transformation, while, in the other case, P is expressed in
terms of X and W, for the inverse backstepping transformation.
2. Nonlinear systems with input delays
One of the main obstacles in designing globally stabilizing con-trol laws for nonlinear systems with long input delays is the finiteescape phenomenon. The input delay may be so large that the con-trol signal cannot reach the plant before its state escapes to infin-ity. Therefore, in the following we assume that the plant_X ¼ f ðX;xÞ is forward complete, that is, for every initial condition
and every bounded input signal the corresponding solution is de-fined for all t P 0.
Our predictor-based designs are based on a (possibly time-vary-ing) feedback law j(t,X(t)), which is assumed to be periodic in itsfirst argument and locally Lipschitz, that globally stabilizes the de-lay-free plant, i.e., _XðtÞ ¼ f ðXðtÞ;jðt;XðtÞÞÞ is globally asymptoti-cally stable.
2.1. Constant delay
In this section we focus on nonlinear systems with constant in-put delay, i.e, systems of the form
_XðtÞ ¼ f ðXðtÞ;Uðt � DÞÞ: ð1Þ
The predictor-based control law for plant (1) is
UðtÞ ¼ jðt þ D; PðtÞÞ ð2Þ
PðtÞ ¼ XðtÞ þZ t
t�Df ðPðhÞ;UðhÞÞdh; ð3Þ
where the initial condition for the integral equation for P(t) is de-fined for all h 2 [t0 � D, t0] (t0 is the initial time which must be givenbecause the closed-loop system is time-varying) as
PðhÞ ¼ Xðt0Þ þZ h
t0�Df ðPðrÞ;UðrÞÞdr: ð4Þ
The signal P(t) represents the D time-units ahead predictorof X, i.e., P(t) = X(t + D). In the case of linear systems the predictorP(t) is given explicitly using the variation of constants formula,with the initial condition P(t � D) = X(t), as PðtÞ ¼ eADXðtÞþR t
t�D eAðt�hÞBUðhÞdh. For systems that are nonlinear, P(t) cannot bewritten explicitly, for the same reason as a nonlinear ODE cannotbe solved explicitly. So we represent P(t) implicitly using the non-linear integral Eq. (3). The computation of P(t) from (3) is straight-forward with a discretized implementation in which P(t) isassigned values based on the right-hand side of (3), which involvesearlier values of P and the values of the input U.
Together with the predictor-based control law (2) we define theinfinite-dimensional backstepping transformation of the actuatorstate given by
WðtÞ ¼ UðtÞ � jðt þ D; PðtÞÞ; ð5Þ
together with its inverse
UðtÞ ¼WðtÞ þ jðt þ D;PðtÞÞ; ð6Þ
where1
PðtÞ ¼Z t
t�Df ðPðhÞ;jðhþ D;PðhÞÞ þWðhÞÞ � dhþ XðtÞ; ð7Þ
with initial condition for all h 2 [t0 � D, t0]
PðhÞ ¼Z h
t0�Df ðPðrÞ;jðrþ D;PðrÞÞ þWðrÞÞ � drþ Xðt0Þ: ð8Þ
The backstepping transformation maps the original system (1)into the ‘‘target system’’ given by
_XðtÞ ¼ f ðXðtÞ;jðt;XðtÞÞ þWðt � DÞÞ ð9ÞWðtÞ ¼ 0; for t P t0: ð10Þ
We have the following result. Its proof can be found in Krstic(2010a).
syfo

M. Krstic, N. Bekiaris-Liberis / Annual Reviews in Control 37 (2013) 220–231 223
Theorem 1. Let _X ¼ f ðX;xÞ be forward complete and_XðtÞ ¼ f ðXðtÞ;jðt;XðtÞÞÞ globally uniformly asymptotically stable.Consider the closed-loop system consisting of the plant (1) and thecontrol law (2) and (3). There exists a class KL function b such that forall initial conditions Xðt0Þ 2 Rn;Uðt0 þ hÞ; h 2 ½�D;0� 2 L1½�D;0� thefollowing holds
XðtÞ 6 bðXðt0Þ; t � t0Þ ð11ÞXðtÞ ¼ jXðtÞj þ sup
t�D6h6tjUðhÞj; ð12Þ
for all t P t0 P 0.If the global asymptotic stability assumption in Theorem 1 is
strengthened with an input-to-state stability assumption of theplant _XðtÞ ¼ f ðXðtÞ;jðt;XðtÞÞ þxðtÞÞ with respect to x, one canconstruct a Lyapunov functional2 for the closed-loop system. To-wards that end we observe from the ‘‘target system’’ (9) and (10)that W(t � D) vanishes in finite time (in D time-units). Hence, underthe input-to-state stability assumption on the plant_XðtÞ ¼ f ðXðtÞ;jðt;XðtÞÞ þxðtÞÞ with respect to x one can constructa Lyapunov functional for the system in the (X,W) variables. UsingMalisoff and Mazenc (2005) there exists a C1 functionS : Rþ � Rn ! Rþ and class K1 functions a1, a2, a3, a4 such that
a3ðjXðtÞjÞ 6 Sðt;XðtÞÞ 6 a4ðjXðtÞjÞ ð13Þ_Sðt;XðtÞÞ 6 �a1ðjXðtÞjÞ þ a2ðjWðt � DÞjÞ ð14Þ
_Sðt;XðtÞÞ ¼ @Sðt;XðtÞÞ@t
þ @Sðt;XðtÞÞ@X
� f ðXðtÞ;jðt;XðtÞÞ þWðt � DÞÞ
ð15Þ
The Lyapunov functional for the ‘‘target system’’ is then
VðtÞ ¼ Sðt;XðtÞÞ þ 2c
Z LðtÞ
0
a2ðrÞr
dr; ð16Þ
where a2ðrÞr is a class K function or a2 has been appropriately major-
ized so this is true (with no generality loss), c > 0 is arbitrary and
LðtÞ ¼ supt�D6h6t
jecðh�tþDÞWðhÞj: ð17Þ
Using the inverse backstepping transformation (6) one can thenprove stability in the original variables (X,U). The functional L canbe also written directly in terms of the original variables (X,U) as
LðtÞ ¼ supt�D6h6t
jecðh�tþDÞðUðhÞ � jðhþ D; PðhÞÞÞj; ð18Þ
where P is given in terms of (X,U) from (3). The two different repre-sentations of the functional L, namely, representations (17) and(18), reveal one of the benefits of the backstepping transformation:If the construction of the functional L in terms of the transformedactuator state W appears to be non-trivial, its form in terms of theoriginal variables (X,U), i.e., relation (18), is rather impossible toguess without the backstepping and predictor transformations.
Robustness of linear predictor feedback laws to small delay mis-matches and to additive disturbances is shown in Krstic (2008b).Robustness of nonlinear predictor feedbacks to delay uncertaintiesis shown in Bekiaris-Liberis and Krstic (2013b). For discrete-timesystems, robustness of predictor feedback laws to plant uncertain-ties is studied in Karafyllis and Krstic (in press).
2.2. Time-varying delay
In this section we consider plants of the form
_XðtÞ ¼ f ðXðtÞ;Uðt � DðtÞÞÞ; ð19Þ
2 The availability of a Lyapunov functional enables one in principle, to studyrobustness of the predictor feedback to parametric uncertainties, its disturbanceattenuation properties, and the inverse-optimal re-design problem.
,
where D is a positive-valued continuously differentiable function oftime. We define the functions
/ðtÞ ¼ t � DðtÞ ð20ÞrðtÞ ¼ /�1ðtÞ; ð21Þ
and we refer to the quantity t � /(t) = D(t) as the delay time. This isthe time interval that indicates how long ago the control signal thatcurrently affects the plant was actually applied. The main goal ofthis section is to determine the predictor state, i.e., the quantity Psuch that X(r(t)) = P(t). From now on we refer to the quantityr(t) � t as the prediction horizon. This is the time interval whichindicates after how long an input signal that is currently applied af-fects the plant. In the constant delay case, the prediction horizon isequal to the delay time, i.e., t � /(t) = D = r(t) � t. The predictor-based control law is
UðtÞ ¼ jðrðtÞ; PðtÞÞ ð22Þ
PðtÞ ¼ XðtÞ þZ t
t�DðtÞ
f ðPðhÞ;UðhÞÞdh
/0ð/�1ðhÞÞ; ð23Þ
with an initial condition for all h 2 [t0 � D(t0), t0] as
PðhÞ ¼ Xðt0Þ þZ h
t0�Dðt0Þ
f ðPðrÞ;UðrÞÞdr/0ð/�1ðrÞÞ
ð24Þ
The fact that P(t) = X(r(t)) can be established by applying thechange of variables t = r(s) in (19).
From (23) one can observe that the function drðhÞdh ¼ 1
/0 ð/�1ðhÞÞ is
employed in the control law. Therefore, one has to appropriatelyrestrict the delay time D(t) such that /0(t) – 0 for all t P 0. Actually,we impose the condition /0(t) > 0 for all t P 0. The reason is that if/0(t) > 0 for all t P 0 then the control signal is able to reach theplant and it does not change the direction of propagation of thecontrol signal (the plant keeps receiving control inputs that arenever older than the ones it has already received). Besides the con-dition /0(t) > 0 for all t P 0, which can be also expressed in terms ofthe delay function as _DðtÞ < 1, for all t P 0, we also assume that thedelay cannot disappear instantaneously, i.e., /0 (or _D) is bounded.Also, the delay has to be positive (to guarantee the causality ofthe system) and bounded (such that the control signal eventuallyreaches the plant).
We are now ready to state the following theorem, the proof ofwhich can be found in Bekiaris-Liberis and Krstic (2012).
Theorem 2. Let _X ¼ f ðX;xÞ be forward complete and_XðtÞ ¼ f ðXðtÞ;jðt;XðtÞÞÞ globally uniformly asymptotically stable. Letthe delay time D(t) = t � /(t) be positive and uniformly bounded fromabove, and its rate _DðtÞ be smaller than one and uniformly boundedfrom below. Consider the closed-loop system consisting of the plant(19) and the control law (22) and (23). There exists a class KLfunction bv such that for all initial conditions Xðt0Þ 2 Rn andU(t0 + h);h 2 [�D(t0),0] 2 L1[�D(t0),0] the following holds
XvðtÞ 6 bvðXvðt0Þ; t � t0Þ ð25ÞXvðtÞ ¼ jXðtÞj þ sup
t�DðtÞ6h6tjUðhÞj; ð26Þ
for all t P t0 P 0.The proof of this result is based on the following equivalent rep-
resentation of the plant (19) using a transport PDE representationfor the actuator state (see also Fig. 3) as_XðtÞ ¼ f ðXðtÞ;uð0; tÞÞ ð27Þutðx; tÞ ¼ pðx; tÞuxðx; tÞ; x 2 ½0;1� ð28Þuð1; tÞ ¼ UðtÞ; ð29Þ
where

Fig. 3. Top: A nonlinear system with a delay in the input. Bottom: The equivalentrepresentation of the delay/nonlinear ODE cascade using a transport PDE for theactuator state.
224 M. Krstic, N. Bekiaris-Liberis / Annual Reviews in Control 37 (2013) 220–231
pðx; tÞ ¼1þ x dð/�1ðtÞÞ
dt � 1� �
/�1ðtÞ � t; ð30Þ
and /(t) is defined in (20). The choice of the transport speed p(x, t) isguided by the fact that we seek a representation for the infinite-dimensional actuator state u(x, t) such that relations (29) and
uð0; tÞ ¼ Uð/ðtÞÞ; ð31Þ
are satisfied. One can verify that u(x, t) is given by
uðx; tÞ ¼ Uð/ðt þ xð/�1ðtÞ � tÞÞÞ; ð32Þ
and consequently both (29) and (31) are satisfied. For a more de-tailed discussion about the choice of the transport speed p(x, t) werefer the reader to Krstic (2009a). Analogously with representation(27)–(30) of the plant, an equivalent representation of the predictordefined in (23) is as
pð1; tÞ ¼ ð/�1ðtÞ � tÞZ 1
0f ðpðy; tÞ;uðy; tÞÞdyþ XðtÞ; ð33Þ
where for all x 2 [0,1]
pðx; tÞ ¼ Pð/ðt þ xð/�1ðtÞ � tÞÞÞ: ð34Þ
With this representation for the predictor state we are able todefine the backstepping transformation of the actuator state as
wðx; tÞ ¼ uðx; tÞ � jðt þ xð/�1ðtÞ � tÞ;pðx; tÞÞ: ð35Þ
Noting that the predictor state p(x, t) satisfies
pðx; tÞ ¼ ð/�1ðtÞ � tÞZ x
0f ðpðy; tÞ; uðy; tÞÞdyþ XðtÞ; ð36Þ
and using the control law (22), system (27)–(29) is mapped to thefollowing ‘‘target system’’
_XðtÞ ¼ f ðXðtÞ;jðt;XðtÞÞ þwð0; tÞÞ ð37Þwtðx; tÞ ¼ pðx; tÞwxðx; tÞ; x 2 ½0;1� ð38Þwð1; tÞ ¼ 0: ð39Þ
One can then construct a Lyapunov functional for the target sys-tem, as in the constant delay case, under the assumption that theplant _XðtÞ ¼ f ðXðtÞ;jðt;XðtÞÞ þxðtÞÞ is input-to-state stable withrespect to x (instead of just globally asymptotically stable whenx = 0). The Lyapunov functional is given in terms of the trans-formed actuator state as
VvðtÞ ¼ Sðt;XðtÞÞ þ 2bc
Z LvðtÞ
0
a2ðrÞr
dr; ð40Þ
where c > 0 is arbitrary, b > 0 is a constant that depends on the delayD, and S, a2 are defined in (14) and
LvðtÞ ¼ supx2½0;1�
jecxwðx; tÞj ¼ limn!1
Z 1
0e2ncxw2nðx; tÞdx
� � 12n
: ð41Þ
2.3. State-dependent delay
In this section we concentrate on nonlinear systems with state-dependent input delay, i.e.,
_XðtÞ ¼ f ðXðtÞ;Uðt � DðXðtÞÞÞÞ; ð42Þ
where D is a nonnegative-valued continuously differentiable func-tion. The main challenge in the case of systems with state-depen-dent delays is the determination of the predictor state. Forsystems with constant delays, D = const, the predictor of the stateX(t) is simply defined as P(t) = X(t + D). For systems with state-dependent delays finding the predictor P(t) is much trickier. Thetime when U reaches the system depends on the value of the stateat that time, namely, the following implicit relationship holdsP(t) = X(t + D(P(t))) (and X(t) = P(t � D(X(t)))).
The predictor-based controller for the plant (42) is
UðtÞ ¼ jðrðtÞ; PðtÞÞ; ð43Þ
where the predictor state P and the prediction time r are
PðtÞ ¼Z t
t�DðXðtÞÞ
f ðPðsÞ;UðsÞÞds1�rDðPðsÞÞf ðPðsÞ;UðsÞÞ þ XðtÞ; ð44Þ
rðtÞ ¼ t þ DðPðtÞÞ; ð45Þ
respectively. The initial predictor P(h), h 2 [t0 � D(X(t0)), t0], is
PðhÞ ¼Z h
t0�DðXðt0ÞÞ
f ðPðsÞ;UðsÞÞds1�rDðPðsÞÞf ðPðsÞ;UðsÞÞ þ Xðt0Þ: ð46Þ
The fact that P(t) given in (44) is the r(t) � t = D(P(t)) time unitsahead predictor of X(t), i.e., P(t) = X(r(t)), can be established by per-forming a change of variables t = r(s) in the ODE for X(t) given in(42) and noting from relations /(t) = t � D(X(t)) and r(t) = /�1(t)that D(X(r(t))) = r(t) � t, which implies in particular that
drðtÞdt¼ 1
1�rDðPðtÞÞf ðPðtÞ;UðtÞÞ : ð47Þ
As in the case of time-varying delays /0 and D must be positiveand bounded. The positiveness of /0 (or equivalently of r0) is guar-anteed by imposing the following condition on the solutions
F c : rDðPðhÞÞf ðPðhÞ;UðhÞÞ < c; for all h P t0 � DðXðt0ÞÞ;ð48Þ
for c 2 (0,1]. We refer to F 1 as the feasibility condition of the control-ler (43)–(45). Due to this condition, we obtain a local result. Bound-ness of /0 and D is then guaranteed by the boundness of thesystem’s norm. We obtain the following result. Its proof can befound in Bekiaris-Liberis & Krstic (2013a).
Theorem 3. Let _X ¼ f ðX;xÞ be forward complete and_XðtÞ ¼ f ðXðtÞ;jðt;XðtÞÞÞ globally uniformly asymptotically stable.Consider the closed-loop system consisting of the plant (42) and thecontrol law (43)–(45). There exist a class K function wRoA and a classKL function bs such that for all initial conditions Xðt0Þ 2 Rn such thatU is locally Lipschitz on the interval [t0 � D(X(t0)), t0) and which satisfy
Xsðt0Þ < wRoAðcÞ; ð49Þ
for some 0 < c < 1, where
XsðtÞ ¼ jXðtÞj þ supt�DðXðtÞÞ6h6t
jUðhÞj; ð50Þ
the following holds
XsðtÞ 6 bsðXsðt0Þ; t � t0Þ; ð51Þ
for all t P t0 P 0. Furthermore, there exists a class K function d⁄ suchthat, for all t P t0 P 0,

0 0.1 0.2 0.3 0.4 0.5 0.6 0.70
0.1
0.2
0.3
0.4
0.5
0.6
0.7
0.8
0.9
0 0.1 0.2 0.3 0.4 0.5 0.6 0.7−0.2
−0.1
0
0.1
0.2
0.3
0.4
0.5
0.6
0.7
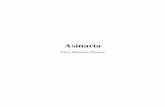
Fig. 4. Response of system (57) with the controller (58) and (59) with initialconditions U(h) = 0, �X(0)2
6 h 6 0 and four different initial conditions for the stateX(0) = 0.15, 0.25, 0.35, 0.43.
M. Krstic, N. Bekiaris-Liberis / Annual Reviews in Control 37 (2013) 220–231 225
DðXðtÞÞ 6 Dð0Þ þ d�ðcÞ; ð52Þj _DðXðtÞÞj 6 c: ð53Þ
A Lyapunov functional for the closed-loop system consisting ofthe plant (42) and the control law (43)–(45) is
V sðtÞ ¼ Sðt;XðtÞÞ þ 2g
Z LsðtÞ
0
a2ðrÞr
dr; ð54Þ
where g > 0 is arbitrary, S, a2 are defined in (14) and
LsðtÞ ¼ supt�DðXðtÞÞ6h6t
jegðhþDðPðhÞÞ�tÞWðhÞj; ð55Þ
WðhÞ ¼ UðhÞ � jðhþ DðPðhÞÞ; PðhÞÞ; ð56Þ
where P is given in terms of (X; U) in (44).Note that there might be cases in which Vs(t) is not continu-
ously differentiable along the trajectories of the closed-loop sys-tem. For example, in the case in which the solution X(t) is notcontinuously differentiable for all t P t0.
2.4. Examples
The first example illustrates the fact that global stabilization isnot possible even for linear systems.
Example 2.1. We consider a scalar unstable system with aLyapunov-like delay
_XðtÞ ¼ XðtÞ þ Uðt � XðtÞ2Þ: ð57Þ
The delay-compensating controller is
UðtÞ ¼ �2PðtÞ; ð58Þ
where
PðtÞ ¼Z t
t�XðtÞ2
ðPðsÞ þ UðsÞÞds1� 2PðsÞðPðsÞ þ UðsÞÞ þ XðtÞ: ð59Þ
In Fig. 4 we show the response of the system and the function /(t) = t � X(t)2 for four different initial conditions of the state andwith the initial conditions for the input chosen as U(h) = 0, �X(0)2 -6 h 6 0. We choose X(0) = 0.15, 0.25, 0.35, X⁄. With X⁄ we denotethe critical value of X(0) for the given initial condition of theinput, such that, for any X(0) P X⁄, the control inputs producedby the feedback law (58) and (59) for positive t never reach theplant. We calculate this time as follows: The function /
(t) = t � X(0)2e2t has a maximum at t⁄ if log 1ffiffiffiffiffiffiffiffiffiffi2Xð0Þ2p� �
¼ t� > 0.
Since /ðt�Þ ¼ log 1ffiffiffiffiffiffiffiffiffiffi2Xð0Þ2p� �
� 12 has to be positive for the control to
reach the plant, it follows X� ¼ 1ffiffiffiffi2ep ¼ 0:43.
In the following example we consider the stabilization problemof a mobile robot with an input delay that grows with the distanceof the robot from then reference position.
Example 2.2. We consider the problem of stabilizing a mobilerobot modeled as
_xðtÞ ¼ vðt � DðxðtÞ; yðtÞÞÞ cosðhðtÞÞ ð60Þ_yðtÞ ¼ vðt � DðxðtÞ; yðtÞÞÞ sinðhðtÞÞ ð61Þ_hðtÞ ¼ xðt � DðxðtÞ; yðtÞÞÞ; ð62Þ
subject to an input delay that grows with the distance relative tothe reference position as
DðxðtÞ; yðtÞÞ ¼ xðtÞ2 þ yðtÞ2; ð63Þ
where (x(t),y(t)) is position of the robot, h(t) is heading, v(t) is speedand x(t) is turning rate. When D = 0 a time-varying stabilizing con-troller is proposed in Pomet (1992) as
xðtÞ ¼ �5PðtÞ2 cosð3/�1ðtÞÞ � PðtÞQðtÞ � ð1þ 25 cos2ð3/�1ðtÞÞÞ �HðtÞ ð64ÞvðtÞ ¼ �PðtÞ þ 5QðtÞðsinð3/�1ðtÞÞ � cosð3/�1ðtÞÞÞ þ QðtÞxðtÞ ð65ÞPðtÞ ¼ XðtÞ cosðHðtÞÞ þ YðtÞ sinðHðtÞÞ ð66ÞQðtÞ ¼ XðtÞ sinðHðtÞÞ � YðtÞ cosðHðtÞÞ; ð67Þ
with
X ¼ x; Y ¼ y; H ¼ h; /�1ðtÞ ¼ t: ð68Þ
The proposed method replaces (68) with
XðtÞ ¼Z t
t�DðxðtÞ;yðtÞÞ
drðsÞds
vðsÞ cosðHðsÞÞdsþ xðtÞ ð69Þ
YðtÞ ¼Z t
t�DðxðtÞ;yðtÞÞ
drðsÞds
vðsÞ sinðHðsÞÞdsþ yðtÞ ð70Þ
HðtÞ ¼ hðtÞ þZ t
t�DðxðtÞ;yðtÞÞ
drðsÞds
xðsÞds ð71Þ
rðtÞ ¼ t þ DðXðtÞ;YðtÞÞ ð72Þ
_rðsÞ ¼ 11� 2vðsÞgðsÞ ð73Þ
gðsÞ ¼ XðsÞ cosðHðsÞÞ þ YðsÞ sinðHðsÞÞ: ð74Þ
The initial conditions are chosen as x(0) = y(0) = h(0) = 1 andx(s) = v(s) = 0 for all �x(0)2 � y(0)2
6 s 6 0. From the given initialconditions we get the initial conditions for the predictors(69)–(71) as X(s) = Y(s) = H(s) = 1 for all �2 6 s 6 0. From the above

−0.4 −0.2 0 0.2 0.4 0.6 0.8 1
0
0.2
0.4
0.6
0.8
1
−20 −10 0 10 20−15
−10
−5
0
5
10
15
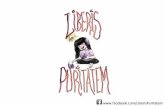
Fig. 5. The trajectory of the robot model (60)–(62), with the compensatedcontroller (64)–(67), (69)–(74) (solid line) and the uncompensated controller(64)–(68) (dashed line) with initial conditions x(0) = y(0) = h(0) = 1 andx(s) = v(s) = 0 for all �x(0)2 � y(0)2
6 s 6 0.
0 5 10 150
1
2
3
4
5
6
7
8
9
10
0 5 10 15−25
−20
−15
−10
−5
0
5
Fig. 6. Top: The delay (63) for the robot model (60)–(62) with the controller (64)–(67), (69)–(74) (solid line) and the controller (64)–(68) (dashed line) with initialconditions x(0) = y(0) = h(0) = 1 and x(s) = v(s) = 0 for all �x(0)2 � y(0)2
6 s 6 0.Bottom: The control efforts v(t) and x(t) for the robot model (60)–(62) with thecontroller (64)–(67), (69)–(74) with initial conditions x(0) = y(0) = h(0) = 1 andx(s) = v(s) = 0 for all �x(0)2 � y(0)2
6 s 6 0.
Fig. 7. Top: A nonlinear system with a wave PDE in the input. Bottom: Theequivalent representation of the wave PDE/nonlinear ODE cascade using the changeof variables (79) and (80).
226 M. Krstic, N. Bekiaris-Liberis / Annual Reviews in Control 37 (2013) 220–231
initial conditions for the predictors one can verify that the systeminitially lies inside the feasibility region. The controller ‘‘kicks in’’at the time instant t0 at which t0 = x(t0)2 + y(t0)2. Sincev(s) = x(s) = 0 for s < 0 we conclude that x(t) = y(t) = h(t) = 1 for all0 6 t 6 t0 and hence, t0 = 2. In Fig. 5 we show the trajectory ofthe robot in the xy plane, whereas in Fig. 6 we show the resultingstate-dependent delay and the controls v(t) and x(t). In the caseof the uncompensated controller (64)–(68), the system is unstable,the delay grows approximately linearly in time, and the vehicle’strajectory is a divergent Archimedean spiral. The compensated con-troller (64)–(67), (69)–(74) recovers the delay-free behavior after 2seconds. From Fig. 5 one can also conclude that the heading h(t) inthe case of the compensated controller converges to zero withdamped oscillations, whereas in the case of the uncompensatedcontroller it increases towards negative infinity (the robot movesclockwise on a spiral).
3. Nonlinear systems with a wave PDE in the input
In this section we consider the following system
_XðtÞ ¼ f ðXðtÞ;uð0; tÞÞ ð75Þuttðx; tÞ ¼ uxxðx; tÞ ð76Þuxð0; tÞ ¼ hðXðtÞ;uð0; tÞÞ ð77Þuxð1; tÞ ¼ UðtÞ; ð78Þ
where X 2 Rn;U 2 R; t 2 Rþ; f : Rn � R! Rn is locally Lipschitz withf(0,0) = 0, and h : Rnþ1 ! R is continuously differentiable withh(0,0) = 0. Our controller design is based on converting the waveequation to a 2 � 2 system of first order transport equations whichconvect in opposite directions (see Fig. 7). To achieve this we definethe following transformations
fðx; tÞ ¼ utðx; tÞ þ uxðx; tÞ ð79Þxðx; tÞ ¼ utðx; tÞ � uxðx; tÞ; ð80Þ
together with their inverses given by

3 Another way to see this is as follows. Construct first the standard 1-time uniahead predictor for Z satisfying (84) as PðtÞ ¼ ZðtÞ þ
R tt�1 g PðhÞ;NðhÞð Þdh, where
Nðt þ x� 1Þ ¼ fðx; tÞ (see Krstic, 2009a). Defining Pðt þ x � 1Þ ¼ pðx; tÞ we rewritethe predictor as pð1; tÞ ¼ ZðtÞ þ
R 10 g pðx; tÞ; fðx; tÞð Þdx. Using definitions (89) and (90
and noting that p2ð1; tÞ ¼ uð0; tÞþR 1
0 uxðx; tÞdxþR 1
0 utðx; tÞdx�R 1
0 h p1ðx; tÞ; p2ðx; tÞð Þdx
M. Krstic, N. Bekiaris-Liberis / Annual Reviews in Control 37 (2013) 220–231 227
utðx; tÞ ¼fðx; tÞ þxðx; tÞ
2ð81Þ
uxðx; tÞ ¼fðx; tÞ �xðx; tÞ
2: ð82Þ
Noting from (77) that it holds that f(0, t) = ut(0, t) + h(X(t),n(t))and defining
nðtÞ ¼ uð0; tÞ; ð83Þ
system (75)–(78) is written as
_ZðtÞ ¼ gðZðtÞ; fð0; tÞÞ ð84Þxtðx; tÞ ¼ �xxðx; tÞ ð85Þxð0; tÞ ¼ fð0; tÞ � 2hðZðtÞÞ ð86Þftðx; tÞ ¼ fxðx; tÞ ð87Þfð1; tÞ ¼ UðtÞ þ utð1; tÞ; ð88Þ
where
Z ¼X
n
� �ð89Þ
gðZ;vÞ ¼f ðX; nÞ
�hðX; nÞ þ v
� �: ð90Þ
Our feedback design, that compensates the wave actuatordynamics, is based on applying the predictor approach to a nomi-nal feedback law l� : Rnþ1 ! R that stabilizes the plant _Z ¼ gðZ;UÞdefined in (84), i.e., a nominal feedback law for the followingsystem
_XðtÞ ¼ f ðXðtÞ; nðtÞÞ ð91Þ_nðtÞ ¼ �hðXðtÞ; nðtÞÞ þ UðtÞ: ð92Þ
Note that such a nominal control law for the augmented system(91) and (92) can be constructed, using one step of backstepping, ifthere exists a control law j that stabilizes the plant _X ¼ f ðX;UÞ, i.e.,such that _X ¼ f ðX;jðXÞÞ is globally asymptotically stable. A choiceof the feedback law l⁄ is then
l�ðXðtÞ; nðtÞÞ ¼ lðXðtÞ; nðtÞÞ þ hðXðtÞ; nðtÞÞ ð93Þ
lðXðtÞ; nðtÞÞ ¼ �c1ðnðtÞ � jðXðtÞÞÞ þ @jðXðtÞÞ@X
f ðXðtÞ; nðtÞÞ: ð94Þ
Noting that the input to the Z system is the delayed version ofthe signal f(1, t) = U(t) + ut(1, t) we conclude that our control lawhas to employ the prediction of Z.
The predictor-based control law that compensates the wavedynamics is chosen as U(t) = �ut(1, t) + l⁄(X(t + 1),n(t + 1)) and isgiven by
UðtÞ ¼ �utð1; tÞ � c1ðp2ð1; tÞ � jðp1ð1; tÞÞÞ
þ @jðp1ð1; tÞÞ@p1
f ðp1ð1; tÞ;p2ð1; tÞÞ þ hðp1ð1; tÞ;p2ð1; tÞÞ; ð95Þ
where c1 > 0 is arbitrary, and p1 2 Rn and p2 2 R, the predictors ofX(t) and u(0, t), respectively, are defined for all x 2 [0,1] as
p1ðx; tÞ ¼ XðtÞ þZ x
0f ðp1ðy; tÞ; p2ðy; tÞÞdy ð96Þ
p2ðx; tÞ ¼ uðx; tÞ þZ x
0utðy; tÞdy�
Z x
0hðp1ðy; tÞ;p2ðy; tÞÞdy; ð97Þ
with initial conditions for all x 2 [0,1]
p1ðx;0Þ ¼ Xð0Þ þZ x
0f ðp1ðy;0Þ;p2ðy; 0ÞÞdy ð98Þ
p2ðx;0Þ ¼ uðx;0Þ þZ x
0utðy;0Þdy�
Z x
0hðp1ðy;0Þ;p2ðy; 0ÞÞdy: ð99Þ
The name ‘‘predictors’’ for p1 and p2 is chosen to emphasize thatp1ð1; tÞ and p2ð1; tÞ are actually the 1-time unit ahead predictors ofXðtÞ and uð0; tÞ respectively, i.e., it holds that p1ð1; tÞ ¼ Xðt þ 1Þ andp2ð1; tÞ ¼ uð0; t þ 1Þ. This fact is shown in the next section.3 Notethat the control law (95) is implementable (see Karafyllis (2011)and Karafyllis & Krstic (2012) for a discussion on the implementationof nonlinear predictors).
Defining for any v 2 H1(0,1)
kvðtÞkH1¼
Z 1
0vðx; tÞ2dx
� �12
þZ 1
0vxðx; tÞ2dx
� �12
; ð100Þ
we are ready to state the following result.
Theorem 4. Consider the closed-loop system consisting of the plant(75)–(78) and the control law (95)–(97). Let the system _Z = g(Z,v) beforward complete, and the system _X ¼ f ðX;jðXÞ þ vÞ input-to-statestable (ISS) with respect to v. Then, for any initial conditionu(�, 0) 2 H2(0,1), ut(�, 0) 2 H1(0,1) which is compatible with the feed-back law(95) and is such that ux(0,0) = h(X(0),u(0,0)), there exist aclass KL function b such that for all t P 0
XðtÞ 6 bðXð0Þ; tÞ ð101ÞXðtÞ ¼ jXðtÞj þ kuðtÞk1 þ kutðtÞkH1
þ kuxðtÞkH1: ð102Þ
The proof of Theorem 4 is based on the introduction of the fol-lowing backstepping transformation of f defined through (87) and(88)
zðx; tÞ ¼ fðx; tÞ � lðpðx; tÞÞ � hðpðx; tÞÞ; ð103Þ
for all x 2 [0,1], where for all x 2 [0,1]
pðx; tÞ ¼ ZðtÞ þZ x
0gðpðy; tÞ; fðy; tÞÞdy; ð104Þ
and l is defined in (94). Transformation (103) and (104) and thecontrol law (95)–(97) transform system (84)–(88) to the target sys-tem given by (see also Fig. 8)
_ZðtÞ ¼ gðZðtÞ;l�ðZðtÞÞ þ zð0; tÞÞ ð105Þxtðx; tÞ ¼ �xxðx; tÞ ð106Þxð0; tÞ ¼ zð0; tÞ þ lðZðtÞÞ � hðZðtÞÞ ð107Þztðx; tÞ ¼ zxðx; tÞ ð108Þzð1; tÞ ¼ 0: ð109Þ
One can then construct the following Lyapunov functional forthe target system (105)–(109)
VðtÞ ¼ ~q1ðV1ðtÞÞ þ ~q2ðV2ðtÞÞ ð110Þ
V1ðtÞ ¼Z 1
0ecð1�xÞxðx; tÞ2dxþ
Z 1
0ecð1�xÞxxðx; tÞ2
� dxþ 2Z 1
0ecð1þxÞzxðx; tÞ2dx; ð111Þ
V2ðtÞ ¼ SðZðtÞÞ þ 2c
Z kzðtÞkc;H1
0
a2ðffiffiffi2p
rÞr
dr ð112Þ
where ~q1; ~q2 are some appropriately defined class K1 functions,c > 0 is arbitrary, kzðtÞkc;H1
¼R 1
0 ecð1þxÞzðx; tÞ2dx� �1
2þR 10 ecð1þxÞzxðx; tÞ2dx
� �12. and S and a2 are defined in (14). Using the
we get after integrating ux relations (96) and (97) for x ¼ 1.
t
),

Fig. 8. The target system (105)–(109) used in the stability analysis of Theorem 4,where Z, g are defined in (89) and (90), and l⁄ in (93).
0 1 2 3 4 5−1.5
−1
−0.5
0
0.5
Fig. 9. The response of the state of the plant (115)–(117) with h(u(0, t)) = u(0, t)3 -� u(0, t) (left), under the control law (120) and (121) (right) for initial conditionsu(x,0) = ut(x,0) = 1, for all x 2 [0,1].
228 M. Krstic, N. Bekiaris-Liberis / Annual Reviews in Control 37 (2013) 220–231
fact that the inverse backstepping transformation of f is defined forall x 2 [0,1] as4
fðx; tÞ ¼ zðx; tÞ þ lðpðx; tÞÞ þ hðpðx; tÞÞ; ð113Þ
where for all x 2 [0,1]
pðx; tÞ ¼ ZðtÞ þZ x
0gðpðy; tÞ;lðpðy; tÞÞ þ hðpðy; tÞÞ
þ zðy; tÞÞdy; ð114Þ
one can then show stability of the original system.Theorem 4 is new even for the case of a lone wave PDE (i.e., not
coupled with an ODE) with anti-collocated nonlinear stiffness, i.e.,the system
uttðx; tÞ ¼ uxxðx; tÞ ð115Þuxð0; tÞ ¼ hðuð0; tÞÞ ð116Þuxð1; tÞ ¼ UðtÞ: ð117Þ
The control law for (115)–(117) is derived from the originalcontrol law (95)–(97) as
UðtÞ ¼ �utð1; tÞ � c1p2ð1; tÞ þ hðp2ð1; tÞÞ; ð118Þ
where for all x 2 [0,1]
p2ðx; tÞ ¼ uðx; tÞ þZ x
0utðy; tÞdy�
Z x
0hðp2ðy; tÞÞdy: ð119Þ
The control law (118) and (119) globally asymptotically stabi-lizes the plant (115)–(117) under a forward completeness assump-tion for the system _n ¼ �hðnÞ þ v with respect to the input v.
3.1. Examples
We illustrate the control design for the special case of a lonewave PDE in the following example.
Example 3.1. Consider system (115)–(117) with h(u(0, t)) =u(0, t)3 � u(0, t). Hence, system _nðtÞ ¼ �nðtÞ3 þ nðtÞ þ UðtÞ is for-ward complete. The predictor-based feedback law (118) is
UðtÞ ¼ �utð1; tÞ � 2p2ð1; tÞ þ p2ð1; tÞ3; ð120Þ
where
p2ð1; tÞ ¼ uð1; tÞ þZ 1
0utðx; tÞdx�
Z 1
0ðp2ð1; tÞ
2
� p2ð1; tÞÞdx: ð121Þ
4 To see this first observe that p(0, t) = Z(t), and hence, combining (107) and (113)we get (86). Since p satisfies the initial value problem px(x, t) = g(p(x, t),l(p(x, t)) + h(p(x, t)) + z(x, t)), p(0, t) = Z(t), using (103) and (104) and the fact thatp(0, t) = Z(t) we conclude that p and p satisfy the same initial value problem. From theuniqueness of solutions we conclude that p � p, and hence, pt(x,t) = px(x,t). Therefore,f in (113) satisfies (87).
In Fig. 9 we show the response of the closed-loop system con-sisting of (115)–(117) withh(u(0, t)) = u(0, t)3 � u(0, t) and the con-trol law (120) and (121), and the control effort for initialconditions as u(x,0) = ut(x,0) = 1 for all x 2 [0,1]. As one can observethe proposed control law achieves stabilization.
4. Systems of nonlinear hyperbolic PDEs
In this section we present the results developed by Coron et al.(submitted for publication) and Vazquez, Coron, Krstic, and Bastin(2011). We consider the following system
0 ¼ ztðx; tÞ þKðzðx; tÞ; xÞzxðx; tÞ þ f ðzðx; tÞ; xÞ; ð122Þ
with the following boundary conditions
z1ð0; tÞ ¼ G0ðz2ð0; tÞÞ ð123Þz2ð1; tÞ ¼ UðtÞ; ð124Þ
where x 2 ½0;1�; z : ½0;1� � ½0;1Þ ! R2;K : R2 �½0;1� ! M2;2ðRÞ; f: R2 � ½0;1� ! R2, withM2;2 denoting the set of 2 � 2 real matrices.We further assume that K(z,x) is twice continuously differentiablewith respect to z and x, and we assume that (possibly after anappropriate state transformation) K(0,x) is a diagonal matrix withnonzero eigenvalues K1(x), K2(x) which are, respectively, positiveand negative, i.e., for all x 2 [0,1]
Kð0; xÞ ¼ diagðK1ðxÞ;K2ðxÞÞ;K1ðxÞ > 0;K2ðxÞ < 0;
ð125Þ
where diag(K1,K2) denotes the diagonal matrix with K1 in the firstposition of the diagonal and K2 in the second. We also assume thatf(0,x) = 0, implying that there is an equilibrium at the origin, andthat f is twice continuously differentiable with respect to z. Denote

Fig. 10. Top: A 2 � 2 quasilinear system of transport PDEs. Bottom: An equivalentrepresentation of the system as a nonlinear transport PDE/nonlinear transport PDEcascade with boundary and in domain coupling.
M. Krstic, N. Bekiaris-Liberis / Annual Reviews in Control 37 (2013) 220–231 229
@f@zð0; xÞ ¼
f11ðxÞ f12ðxÞf21ðxÞ f22ðxÞ
� �ð126Þ
and assume that fij 2 C1([0,1]). Finally, we assume that G0(x) is twicedifferentiable and vanishes at the origin. We seek a control law U(t)that makes the origin of (122)–(124) locally exponentially stable.Our control design is based on the linearization of system (122)–(124). Before we linearize system (122)–(124) around the originwe rescale the variable z so that we make the linear part of f antidi-agonal since we present our linear design for the case of an antidi-agonal linear f (with no generality loss). Defining the new variable was
w ¼ UðxÞz ð127ÞUðxÞ ¼ diagð/1ðxÞ;/2ðxÞÞ; ð128Þ
where
/1ðxÞ ¼ eR x
0
f11 ðyÞK1 ðyÞ
dy ð129Þ
/2ðxÞ ¼ e�R x
0
f22ðyÞK2 ðyÞ
dy; ð130Þ
we rewrite system (122)–(124) in the new variables as (see Fig. 10)
0 ¼ wtðx; tÞ � RðxÞwxðx; tÞ � CðxÞwðx; tÞþKNLðwðx; tÞ; xÞwxðx; tÞ þ fNLðwðx; tÞ; xÞ; ð131Þ
with boundary conditions as
w1ð0; tÞ ¼ qw2ð0; tÞ þ GNLðw2ð0; tÞÞ ð132Þw2ð1; tÞ ¼ VðtÞ; ð133Þ
where
RðxÞ ¼ �Kð0; xÞ ð134Þ
CðxÞ ¼0 �f12ðxÞ
�f21ðxÞ 0
� �ð135Þ
VðtÞ ¼ /2ð1ÞUðtÞ ð136Þ
q ¼ dG0ð0Þdz
; ð137Þ
and the nonlinear perturbation terms KNL and fNL are such thatKNLð0; xÞ ¼ 0; fNLð0; xÞ ¼ @fNL
@w ð0; xÞ ¼ 0;GNLð0Þ ¼ 0.Our design is based on a backstepping design for the linear part
of system (131). Defining w ¼ u v½ �T ;K1 ¼ �1;K2 ¼ ��2; f12 ¼ �c1
and f21 = �c2 we rewrite the linear part of system (131) as
utðx; tÞ ¼ ��1ðxÞuxðx; tÞ þ c1ðxÞvðx; tÞ ð138Þv tðx; tÞ ¼ �2ðxÞvxðx; tÞ þ c2ðxÞuðx; tÞ ð139Þuð0; tÞ ¼ qvð0; tÞ ð140Þvð1; tÞ ¼ VðtÞ: ð141Þ
System (138)–(141) is mapped to the following ‘‘target system’’
atðx; tÞ ¼ ��1ðxÞaxðx; tÞ ð142Þbtðx; tÞ ¼ �2ðxÞbxðx; tÞ ð143Það0; tÞ ¼ qbð0; tÞ ð144Þbð1; tÞ ¼ 0; ð145Þ
using the invertible backstepping transformation
aðx; tÞ ¼ uðx; tÞ �Z x
0Kuuðx; nÞuðn; tÞdn�
Z x
0Kuv ðx; nÞvðn; tÞdyn ð146Þ
bðx; tÞ ¼ vðx; tÞ �Z x
0Kvuðx; nÞuðn; tÞdn�
Z x
0Kvv ðx; nÞvðn; tÞdn; ð147Þ
and the control law
VðtÞ ¼Z 1
0Kvuð1; xÞuðx; tÞdxþ
Z 1
0Kvvð1; xÞvðx; tÞdx: ð148Þ
The kernels of the backstepping transformation satisfy thefollowing 2 � 2 system of linear hyperbolic PDEs on the triangulardomain T ¼ fðx; nÞ : 0 6 n 6 x 6 1gwhich can be shown to be well-posed (Vazquez et al. (2011))
�1ðxÞKuux þ �1ðnÞKuu
n ¼ ��01ðnÞKuu � c2ðnÞKuv ð149Þ
�1ðxÞKuvx � �2ðnÞKuv
n ¼ �02ðnÞKuv � c1ðnÞKuu ð150Þ
�2ðxÞKvux � �1ðnÞKvu
n ¼ �01ðnÞKvu þ c2ðnÞKvv ð151Þ
�2ðxÞKvvx þ �2ðnÞKvv
n ¼ ��02ðnÞKvv þ c2ðnÞKvu; ð152Þ
with boundary conditions
Kuuðx;0Þ ¼ �2ð0Þq�1ð0Þ
Kuvðx;0Þ ð153Þ
Kuvðx; xÞ ¼ c1ðxÞ�1ðxÞ þ �2ðxÞ
ð154Þ
Kvuðx; xÞ ¼ � c2ðxÞ�1ðxÞ þ �2ðxÞ
ð155Þ
Kvvðx;0Þ ¼ �1ð0Þq�2ð0Þ
Kvuðx;0Þ: ð156Þ
Using definition (127) and (136), the control law for the originalnonlinear system (122)–(124) is
UðtÞ ¼ 1/2ð1Þ
Z 1
0Kvuð1; xÞ/1ðxÞz1ðx; tÞdxþ 1
/2ð1Þ
�Z 1
0Kvvð1; xÞ/2ðxÞ � z2ðx; tÞdx: ð157Þ
With the control law (157) the boundary condition (124) for theclosed-loop system is written as
z1ð1; tÞ ¼1
/2ð1Þ
Z 1
0Kvuð1; xÞ/1ðxÞz1ðx; tÞdxþ 1
/2ð1Þ
�Z 1
0Kvvð1; xÞ/2ðxÞ � z2ðx; tÞdx: ð158Þ
Defining the H2 norm of z ¼ z1 z2½ �T as
kzðtÞkH2¼Z 1
0zðx; tÞT zðx; tÞdxþ
Z 1
0zxðx; tÞT zxðx; tÞdx
þZ 1
0zxxðx; tÞT zxxðx; tÞdx; ð159Þ
and imposing the following compatibility conditions

230 M. Krstic, N. Bekiaris-Liberis / Annual Reviews in Control 37 (2013) 220–231
0 ¼ z1ð0; 0Þ � G0ðz2ð0;0ÞÞ ð160Þ
0 ¼ z2ð1;0Þ �1
/2ð1Þ
Z 1
0Kvuð1; xÞ/1ðxÞ � z1ðx; 0Þdx
� 1/2ð1Þ
Z 1
0Kvvð1; xÞ/2ðxÞ � z2ðx;0Þdx ð161Þ
0 ¼ �K1ðzð0;0Þ;0Þz1;xð0;0Þ � f1ðzð0; 0Þ;0Þþ G00ðz2ð0;0ÞÞðK2ðzð0; 0Þ; 0Þz2;xð0; 0Þ þ f2ðzð0; 0Þ;0ÞÞ ð162Þ
0 ¼Z 1
0
Kvuð1; xÞ/1ðxÞ/2ð1Þ
K1ðzðx;0Þ; xÞz1;xðx;0Þdx
þZ 1
0
Kvuð1; xÞ/1ðxÞ/2ð1Þ
f1ðzðx; 0Þ; xÞdx
þZ 1
0
Kvvð1; xÞ/2ðxÞ/2ð1Þ
ðK2ðzðx;0Þ; xÞ � z2;xðx; 0Þ
þ f2ðzðx;0Þ; xÞÞdx�K2ðzð1;0Þ;1Þz2;xð1;0Þ � f2ðzð1;0Þ;1Þ;ð163Þ
we obtain the following result.
Theorem 5. Consider the closed-loop system (122), (123), (158).Under the assumptions that K 2 C2ðR2 � ½0;1�Þ; f ð�; xÞ2 C2ðR2Þ; @f ð0;�Þ
@z 2 C1ð½0;1�Þ;G0 2 C2ðRÞ, for all initial conditionz0 2 H2([0,1]) that satisfy the compatibility conditions (161)–(163),there exist d > 0, k > 0 and c > 0 such that if kzð0ÞkH2
< d, then for allt P 0
kzðtÞkH26 ce�ktkzð0ÞkH2
: ð164ÞNote that the compatibility conditions (161) and (163) depend
on our feedback laws and therefore are not natural. They can beomitted by considering a dynamical extension (see Coron et al.(submitted for publication)). The proof of Theorem 5 is based onemploying the linear backstepping transformation (146) and(147) on the rescaled nonlinear system (131), which results inthe following target system
ct � RðxÞcx þ F3½c; cx� þ F4½c� ¼ 0; ð165Þ
where c ¼ a b½ �T and F3, F4 are nonlinear functionals of c and cx
(see Coron et al. (submitted for publication) for details). The H2 localexponential stability of the target system can be then studied withthe following Lyapunov functional
SðtÞ ¼ UðtÞ þ VðtÞ þWðtÞ ð166Þ
UðtÞ ¼Z 1
0cTðx; tÞDðxÞcðx; tÞdx ð167Þ
VðtÞ ¼Z 1
0cT
t ðx; tÞR½c�ðxÞctðx; tÞdx ð168Þ
WðtÞ ¼Z 1
0cT
ttðx; tÞR½c�ðxÞcttðx; tÞdx; ð169Þ
where D(x) = diag(D1(x),D2(x)) is positive definite for all x 2 [0,1]and R[c] is a symmetric and positive definite matrix for allsupx2[0,1]jc(x, t)j < d.
5. Conclusions
In our development we assume that the nonlinear plant underconsideration is forward complete and globally stabilizable. How-ever, our predictor-based design can be applied to systems thatare not forward complete (but they are globally stabilizable inthe absence of the input delay) Krstic (2008) and to systems thatare only locally stabilizable Bekiaris-Liberis and Krstic (2013a).One of the topics of ongoing research is to extend the predictoridea to nonlinear systems with distributed input and state delays(see Bekiaris-Liberis and Krstic (2011a) and Bekiaris-Liberis and
Krstic (2011b) for linear results) and to systems with input-depen-dent delay.
Although we focus on the stabilization of a wave PDE/nonlinearODE cascade, our results opens an opportunity to tackle stabiliza-tion problems of other PDE/nonlinear ODE cascades, for example,when the PDE is of diffusive type.
We present results on the stabilization of 2 � 2 systems of firstorder hyperbolic quasilinear PDEs assuming measurement of thefull state. Yet, we remove this requirement in Vazquez, Krstic, Cor-on, and Bastin (2012) where we design an output feedback controllaw. In the future we would like to extend the present methodol-ogy to the case of n � n systems. For the linear case an extensionto n � n systems is presented in Di Meglio et al. (2012a) for systemthat have n positive and one negative transport speeds, with actu-ation only on the state corresponding to the negative velocity.
Acknowledgement
We thank Rafael Vazquez, Jean-Michel Coron, Georges Bastin,and Florent Di Meglio for their results and contributions that wehave incorporated in this review paper.
References
Altintas, Y., Engin, S., & Budak, E. (1999). Analytical stability prediction and design ofvariable pitch cutters. ASME Journal of Manufacturing Science and Engineering,121, 173–178.
Artstein, Z. (1982). Linear systems with delayed controls: A reduction. IEEETransactions on Automatic Control, 27, 869–879.
Bekiaris-Liberis, N., & Krstic, M. (2010). Compensating the distributed effect of awave PDE in the actuation or sensing path of MIMO LTI systems. Systems &Control Letters, 59, 713–719.
Bekiaris-Liberis, N., & Krstic, M. (2011a). Lyapunov stability of linear predictorfeedback for distributed input delay. IEEE Transactions on Automatic Control, 56,655–660.
Bekiaris-Liberis, N., & Krstic, M. (2011b). Compensating distributed effect ofdiffusion and counter-convection in multi-input and multi-output LTIsystems. IEEE Transactions on Automatic Control, 56, 637–642.
Bekiaris-Liberis, N., & Krstic, M. (2012). Compensation of time-varying input andstate delays for nonlinear systems. Journal of Dynamic Systems, Measurement,and Control, 134, paper 011009.
Bekiaris-Liberis, N., & Krstic, M. (2013a). Compensation of state-dependent inputdelay for nonlinear systems. IEEE Transactions on Automatic Control, 58,275–289.
Bekiaris-Liberis, N., & Krstic, M. (2013b). Robustness of nonlinear predictorfeedback laws to time- and state-dependent delay perturbations. Automatica,49, 1576–1590.
Cloosterman, M. B. G., van de Wouw, N., Heemels, W. P. M. H., & Nijmeijer, H.(2009). Stability of networked control systems with uncertain time-varyingdelays. IEEE Transactions on Automatic Control, 54, 1575–1580.
Coron, J.-M., dAndrea-Novel, B., & Bastin, G. (2006). A strict Lyapunov function forboundary control of hyperbolic systems of conservation laws. IEEE Transactionson Automatic Control, 52, 2–11.
Coron, J.-M., Vazquez, R., Krstic, M., & Bastin, G. (submitted for publication). Localexponential H2 stabilization of a 2 � 2 quasilinear hyperbolic system usingbackstepping <http://arxiv.org/abs/1208.6475>.
Curro, C., Fusco, D., & Manganaro, N. (2011). A reduction procedure for generalizedRiemann problems with application to nonlinear transmission lines. Journal ofPhysics A: Mathematical Theory, 44, paper 335205.
de Halleux, J., Prieur, C., Coron, J.-M., d’Andréa-Novel, B., & Bastin, G. (2003).Boundary feedback control in networks of open channels. Automatica, 39,1365–1376.
Dick, M., Gugat, M., & Leugering, G. (2010). Classical solutions and feedbackstabilisation for the gas flow in a sequence of pipes. Networks and HeterogeneousMedia, 5, 691–709.
Di Meglio, F., Vazquez, R., & Krstic, M. (2012). Stabilization of a linear hyperbolicsystem with one boundary controlled transport PDE coupled with ncounterconvecting PDEs. In Proceedings of the IEEE conference on decision andcontrol.
Di Meglio, F., Krstic, M., Vazquez, R., & Petit, N. (2012). Backstepping stabilization ofan underactuated 3 � 3 linear hyperbolic system of fluid flow transportequations. In American control conference.
Dos Santos, V., & Prieur, C. (2008). Boundary control of open channels withnumerical and experimental validations. IEEE Transactions on Control SystemTechnology, 16, 1252–1264.
Goatin, P. (2006). The Aw-Rascle vehicular traffic flow model with phasetransitions. Mathematical and Computer Modeling, 44, 287–303.
Greenberg, J.-M., & Li, T.-T. (1984). The effect of boundary damping for thequasilinear wave equations. Journal of Differential Equations, 52, 66–75.

M. Krstic, N. Bekiaris-Liberis / Annual Reviews in Control 37 (2013) 220–231 231
Gugat, M., & Dick (2011). Time-delayed boundary feedback stabilization of theisothermal Euler equations with friction. Mathematical Control and RelatedFields, 1, 469–491.
Gugat, M., & Herty, M. (2011). Existence of classical solutions and feedbackstabilization for the flow in gas networks. ESAIM Control Optimization andCalculus of Variations, 17, 28–51.
Gugat, M., & Leugering, G. (2003). Global boundary controllability of the de St.Venant equations between steady states. Annales de I’Institut Henri Poincare (C)Non Linaire, 20, 1–11.
Gugat, M., Leugering, G., & Schmidt, E. (2004). Global controllability between steadysupercritical flows in channel networks. Mathematical Methods in AppliedScience, 27, 781–802.
Hansen, M., Stoustrup, J., & Bendtsen, J.-D. (2011). Modeling of nonlinear marinecooling systems with closed circuit flow. In Proceedings of the 18th IFAC worldcongress. Milan.
Heemels, W. P. M. H., Teel, A. R., van de Wouw, N., & Nesic, D. (2010). Networkedcontrol systems with communication constraints: Tradeoffs betweentransmission intervals, delays and performance. IEEE Transactions onAutomatic Control, 55, 1781–1796.
Hespanha, J. P., Naghshtabrizi, P., & Xu, Y. (2007). A survey of recent results innetworked control systems. Proceedings of the IEEE, 95, 138–162.
Jankovic, M. (2001). Control Lyapunov–Razumikhin functions and robuststabilization of time delay systems. IEEE Transactions on Automatic Control, 46,1048–1060.
Jankovic, M. (2009). Cross-term forwarding for systems with time delay. IEEETransactions on Automatic Control, 54, 498–511.
Jansen, J.D. (1993). Nonlinear dynamics of oilwell drillstrings. Ph.D. thesis. DelftUniversity of Technology.
Karafyllis, I. (2006). Finite-time global stabilization by means of time-varyingdistributed delay feedback. SIAM Journal of Control Optimization, 45, 320–342.
Karafyllis, I. (2011). Stabilization by means of approximate predictors for systemswith delayed input. SIAM Journal on Control and Optimization, 49, 1100–1123.
Karafyllis, I., & Krstic, M. (in press). Robust predictor feedback for discrete-timesystems with input delays. International Journal of Control.
Karafyllis, I., & Krstic, M. (2012). Nonlinear stabilization under sampled and delayedmeasurements, and with inputs subject to delay and zero-order hold. IEEETransactions on Automatic Control, 57, 1141–1154.
Kravaris, C., & Wright, R. A. (1989). Deadtime compensation for nonlinear processes.AIChE Journal, 35, 1535–1542.
Krstic, M. (2004). Feedback linearizability and explicit integrator forwardingcontrollers for classes of feedforward systems. IEEE Transactions on AutomaticControl, 49, 1668–1682.
Krstic, M. (2008). On compensating long actuator delays in nonlinear control. IEEETransactions on Automatic Control, 53, 1684–1688.
Krstic, M. (2008b). Lyapunov tools for predictor feedbacks for delay systems:Inverse optimality and robustness to delay mismatch. Automatica, 44,2930–2935.
Krstic, M. (2009a). Delay compensation for nonlinear, adaptive, and PDE systems.Birkhauser.
Krstic, M. (2009b). Compensating actuator and sensor dynamics governed bydiffusion PDEs. Systems and Control Letters, 58, 372–377.
Krstic, M. (2009c). Compensating a string PDE in the actuation or sensing path of anunstable ODE. IEEE Transactions on Automatic Control, 54, 1362–1368.
Krstic, M. (2010a). Input delay compensation for forward complete and feedforwardnonlinear systems. IEEE Transactions on Automatic Control, 55, 287–303.
Krstic, M. (2010b). Lyapunov stability of linear predictor feedback for time-varyinginput delay. IEEE Transactions on Automatic Control, 55, 554–559.
Krstic, M., & Bekiaris-Liberis, N. (2013). Nonlinear stabilization in infinitedimension. In 9th IFAC symposium on nonlinear control systems.
Krstic, M., Kanellakopoulos, I., & Kokotovic, P. V. (1995). Nonlinear and adaptivecontrol design. Wiley.
Krstic, M., Magnis, L., & Vazquez, R. (2008). Nonlinear stabilization of shock-likeunstable equilibria in the viscous Burgers PDE. IEEE Transactions on AutomaticControl, 53, 1678–1683.
Krstic, M., Magnis, L., & Vazquez, R. (2009). Nonlinear control of the viscous Burgersequation: Trajectory generation, tracking, and observer design. Journal ofDynamic Systems, Measurement, and Control, 131, paper 021012 (8 pages).
Krstic, M., & Smyshlyaev, A. (2008). Boundary control of PDEs: A course onbackstepping designs. SIAM.
Litrico, X., & Fromion, V. (2004). Analytical approximation of open-channel flow forcontroller design. Applied Mathematical Modelling, 28, 677–695.
Malisoff, M., & Mazenc, F. (2005). Further remarks on strict input-to-state stableLyapunov functions for time-varying systems. Automatica, 41, 1973–1978.
Mazenc, F., & Bliman, P.-A. (2006). Backstepping design for time-delay nonlinearsystems. IEEE Transactions on Automatic Control, 51, 149–154.
Mazenc, F., Mondie, S., & Francisco, R. (2004). Global asymptotic stabilization offeedforward systems with delay at the input. IEEE Transactions on AutomaticControl, 49, 844–850.
Mazenc, F., & Niculescu, S.-I. (2011). Generating positive and stable solutionsthrough delayed state feedback. Automatica, 47, 525–533.
Mondie, S., & Michiels, W. (2003). Finite spectrum assignment of unstable time-delay systems with a safe implementation. IEEE Transactions on AutomaticControl, 48, 2207–2212.
Montestruque, L. A., & Antsaklis, P. (2004). Stability of model-based networkedcontrol systems with time-varying transmission lines. IEEE Transactions onAutomatic Control, 49, 1562–1572.
Mounier, H., & Rudolph, J. (1998). Flatness-based control of nonlinear delaysystems: A chemical reactor example. International Journal of Control, 71,871–890.
Nihtila, M. (1991). Finite pole assignment for systems with time-varying inputdelays. In Proceedings of the IEEE conference on decision and control.
Pomet, J.-B. (1992). Explicit design of time-varying stabilizing control laws for aclass of controllable systems without drift. Systems & Control Letters, 18,147–158.
Prieur, C. (2009). Control of systems of conservation laws with boundary errors.Networks and Heterogeneous Media, 4, 393–407.
Prieur, C., Winkin, J., & Bastin, G. (2008). Robust boundary control of systems ofconservation laws. Mathematics of Control, Signals, and Systems, 20, 173–197.
Ren, B., Wang, J.-M., & Krstic, M. (2013). Stabilization of an ODE-Schrodingercascade <http://flyingv.ucsd.edu/papers/PDF/167.pdf>. Systems & ControlLetters, 62, 503–510.
Richard, J.-P. (2003). Time-delay systems: An overview of some recent advances andopen problems. Automatica, 39, 1667–1694.
Sagert, C., Di Meglio, F., Krstic, M., & Rouchon, P. (2013). Backstepping and flatnessapproaches for stabilization of the stick-slip phenomenon for drilling. In IFACsymposium on system structure and control.
Saldivar, M.B., Mondie, S., Loiseau, J.-J., & Rasvan, V. (2011). Stick-Slip oscillations inoillwell drillstrings: Distributed Parameter and neutral type retarded modelapproaches. In Proceedings of the 18th IFAC world congress.
Sipahi, R., Lammer, S., Niculescu, S.-I., & Helbing, D. (2006). On stability analysis andparametric design of supply networks under the presence of transportationdelays. In Proceedings of the ASME-IMECE conference.
Sterman, J.D. (2000). Business dynamics: Systems thinking and modeling for a complexworld. Boston: McGraw-Hill.
Susto, G. A., & Krstic, M. (2010). Control of PDE-ODE cascades with Neumanninterconnections. Journal of the Franklin Institute, 347, 284–314.
Tang, S., & Xie, C. (2011a). State and output feedback boundary control for a coupledPDE-ODE system. Systems & Control Letters, 60, 540–545.
Tang, S., & Xie, C. (2011b). Stabilization for a coupled PDE-ODE control system.Journal of the Franklin Institute, 348, 2142–2155.
Vazquez, R., Coron, J.-M., Krstic, M., & Bastin, G. (2011). Local exponential H2
stabilization of a 2 � 2 quasilinear hyperbolic system using backstepping. InIEEE conference on decision and control.
Vazquez, R., Coron, J.-M., & Krstic, M. (2011). Backstepping boundary stabilizationand state estimation of a 2 � 2 linear hyperbolic system. In IEEE conference ondecision and control.
Vazquez, R., Krstic, M., Coron, J.-M., & Bastin, G. (2012). Collocated output-feedbackstabilization of a 2 � 2 quasilinear hyperbolic system using backstepping. InAmerican control conference.
Vazquez, R., & Krstic, M. (2008a). Control of 1-D parabolic PDEs with Volterranonlinearities – Part I: Design. Automatica, 44, 2778–2790.
Vazquez, R., & Krstic, M. (2008b). Control of 1-D parabolic PDEs with Volterranonlinearities – Part II: Analysis. Automatica, 44, 2791–2803.
Witrant, E., Canudas-de-Wit, C. C., Georges, D., & Alamir, M. (2007). Remotestabilization via communication networks with a distributed control law. IEEETransactions on Automatic Control, 52, 1480–1485.
Miroslav Krstic holds the Daniel L. Alspach endowed chair and is the foundingdirector of the Cymer Center for Control Systems and Dynamics at UC San Diego. Healso serves as Associate Vice Chancellor for Research at UCSD. Krstic is a recipient ofthe PECASE, NSF Career, and ONR Young Investigator Awards, as well as the Axelbyand Schuck Paper Prizes. Krstic was the first recipient of the UCSD Research Awardin the area of engineering (immediately following the Nobel laureate in ChemistryRoger Tsien) and has held the Russell Severance Springer Distinguished VisitingProfessorship at UC Berkeley and the Harold W. Sorenson Distinguished Profes-sorship at UCSD. He is a Fellow of IEEE and IFAC and serves as Senior Editor in IEEETransactions on Automatic Control and Automatica. He has served as Vice Presidentof the IEEE Control Systems Society and chair of the IEEE CSS Fellow Committee.Krstic has coauthored nine books on adaptive, nonlinear, and stochastic control,extremum seeking, control of PDE systems including turbulent flows, and control ofdelay systems.
Nikolaos Bekiaris-Liberis is currently a postdoctoral researcher at both thedepartments of Electrical Engineering and Computer Sciences, and Civil and Envi-ronmental Engineering at the University of California, Berkeley. He received his PhDdegree from the department of Mechanical and Aerospace Engineering at theUniversity of California, San Diego. He has coauthored the book Nonlinear ControlUnder Nonconstant Delays (SIAM, 2013). His research interests include control ofdelay systems, control of distributed parameter systems, and nonlinear control.