
Anleitung Elektrische Antriebstechnik - Maschinenbau · Labor Mechatronik Versuch BV-1 Elektrische...
12
Labor Mechatronik Versuch BV-1 Elektrische Antriebstechnik Steuerung- und Regelung Fachbereich 2 Ingenieurwissenschaften II Labor Mechatronik Lehrgebiet: Mechatronik Versuchsanleitung Versuch BV_1 Elektrische Antriebstechnik April 2012 Prof. Hartenstein Seite 1 von 12 Bildquellen: Fa. LUCAS NÜLLE Prof. Lindemann
Transcript of Anleitung Elektrische Antriebstechnik - Maschinenbau · Labor Mechatronik Versuch BV-1 Elektrische...
Labor Mechatronik Versuch BV-1 Elektrische Antriebstechnik
Steuerung-und RegelungSteuerung-und Regelung
Fachbereich 2 Ingenieurwissenschaften II Labor Mechatronik Lehrgebiet: Mechatronik
Versuchsanleitung Versuch BV_1 Elektrische Antriebstechnik
April 2012 Prof. Hartenstein Seite 1 von 12
Bildquellen: Fa. LUCAS NÜLLE
Prof. Lindemann
Labor Mechatronik Versuch BV-1 Elektrische Antriebstechnik
April 2012 Prof. Hartenstein Seite 2 von 12 Prof. Lindemann
1. Versuchsgegenstand – Versuchsziel Kennen lernen und Untersuchen moderner Drehstrommotoren mit Frequenzumrichter- Steuerung und Lastsimulation durch einen Servomotor. Versuchsziel: Ein moderner Frequenzumrichter verwandelt jeden beliebigen Drehstrom-Standardmotor in einen drehzahlvariablen Antrieb. Ziel des Versuches ist es moderne elektromotorische Antriebssysteme mit Frequenz-umrichtung kennen zu lernen, die Kennlinien einer Dreiphasenasynchronmaschine aufzunehmen und das Verhalten des Antriebssystems bei verschiedenen Lastfällen zu untersuchen. 2. Literatur
• Fischer, R. Elektrische Maschinen Hanser, 2009 ISBN 978-3-446-41754-0
• Riefenstahl, M Elektrische Antriebstechnik Viehweg + Teubner, 2010 ISBN 978-3-834-481331-2
3. Versuchsvorbereitung - Kontrollfragen 3.1 Erläutern Sie Funktionsweise einer Zweiweggleichrichterschaltung. Skizzieren Sie Strom- und Spannungsverläufe vor und hinter dem Gleichrichter, wenn dieser mit einer sinusförmigen Eingangsspannung gespeist wird. 3.2 Erläutern Sie die Funktionsweise einer Asynchron- und einer Synchronmaschine. Welche Eigenschaften haben sie? 3.3 Nennen Sie weitere Typen elektrischer Antriebsmaschinen! 3.4 Was sind Servomotoren und wo werden sie vorrangig eingesetzt? 3.5 Erläutern Sie die Funktionsweise eines Thyristors und erklären Sie die Begriffe Phasenanschittssteuerung und Zündwinkel. Skizzieren Sie die Kennlinie eines Thyristors. Wie kann ein Thyristor zur Leistungssteuerung eingesetzt werden? 3.6 Wie arbeiten Frequenzumrichter? 3.7 Welche Vorteile haben elektrische Aktoren im Vergleich zu hydraulischen und pneumatischen Aktoren? 3.8 Erläutern Sie das Prinzip der Pulsweitenmodulation. Wie kann eine elektrische Maschine mit einem pulsweitenmodulierten Signal bezüglich der Last und der Drehzahl gesteuert werden? Beschreiben Sie das Prinzip.
Labor Mechatronik Versuch BV-1 Elektrische Antriebstechnik
4. Versuchsdurchführung – Hinweise zur Versuchsauswertung Der Versuch besteht aus dem Teilversuch 1 „Gleichrichterschaltung mit Thyristor und Phasenanschnittssteuerung“ am Versuchsstand Power-Board Phasenanschnittssteuerung (siehe Bild 1) und den Teilversuchen 2-4 am Versuchsstand „Industrielle Antriebe mit Frequenzumrichter und Lastsimulation“ der Fa. LUCAS NÜLLE (siehe Bilder 4-8). Zur Speicherung der Versuchsdaten vom Oszillographen bei Teilversuch 1 ist ein FAT formatierter USB Stick notwendig!
Versuch 1 Gleichrichterschaltung mit Thyristor und Phasenanschnittssteuerung
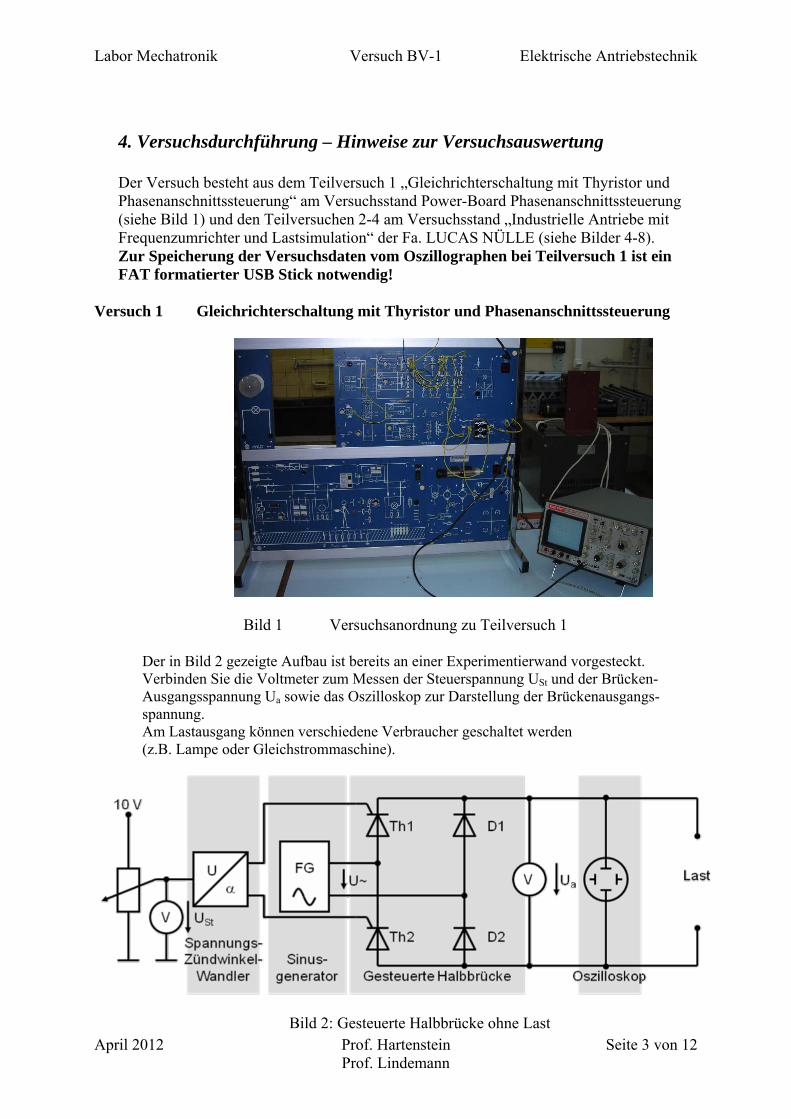
Bild 1 Versuchsanordnung zu Teilversuch 1 Der in Bild 2 gezeigte Aufbau ist bereits an einer Experimentierwand vorgesteckt. Verbinden Sie die Voltmeter zum Messen der Steuerspannung USt und der Brücken-Ausgangsspannung Ua sowie das Oszilloskop zur Darstellung der Brückenausgangs-spannung.
Am Lastausgang können verschiedene Verbraucher geschaltet werden (z.B. Lampe oder Gleichstrommaschine).
Bild 2: Gesteuerte Halbbrücke ohne Last
April 2012 Prof. Hartenstein Seite 3 von 12 Prof. Lindemann
Labor Mechatronik Versuch BV-1 Elektrische Antriebstechnik
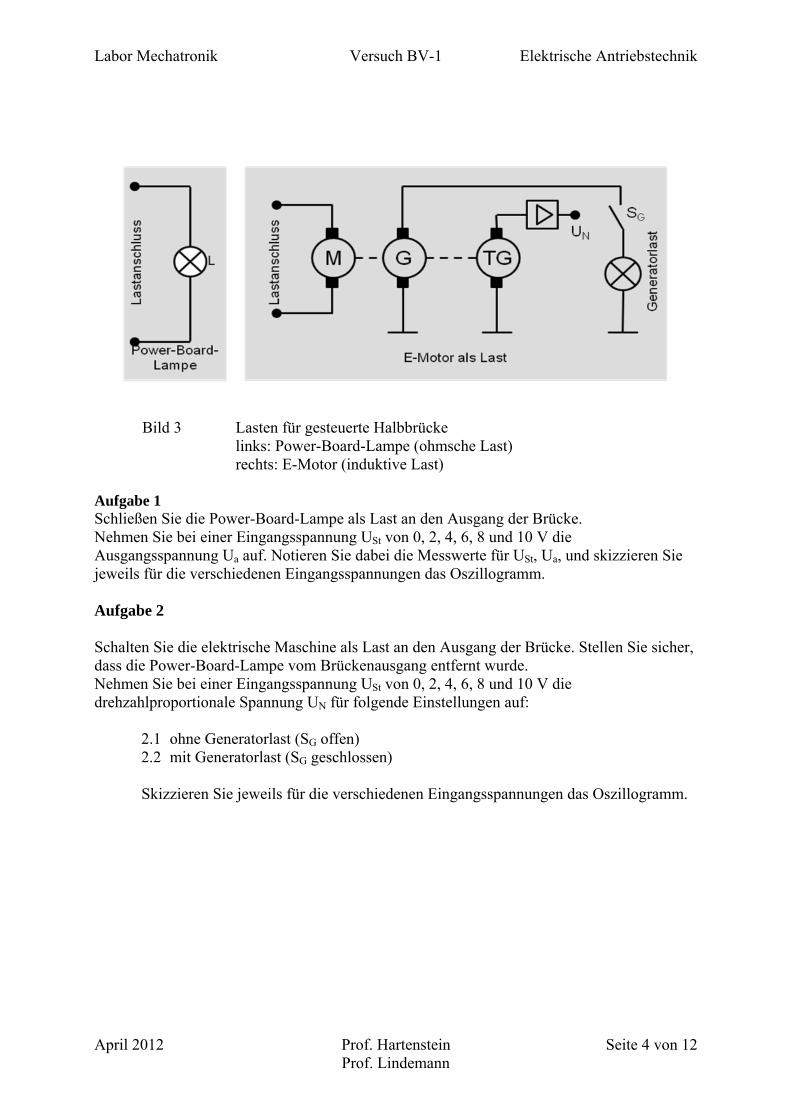
Bild 3 Lasten für gesteuerte Halbbrücke links: Power-Board-Lampe (ohmsche Last) rechts: E-Motor (induktive Last)
Aufgabe 1
Schließen Sie die Power-Board-Lampe als Last an den Ausgang der Brücke. Nehmen Sie bei einer Eingangsspannung USt von 0, 2, 4, 6, 8 und 10 V die
Ausgangsspannung Ua auf. Notieren Sie dabei die Messwerte für USt, Ua, und skizzieren Sie jeweils für die verschiedenen Eingangsspannungen das Oszillogramm.
Aufgabe 2 Schalten Sie die elektrische Maschine als Last an den Ausgang der Brücke. Stellen Sie sicher, dass die Power-Board-Lampe vom Brückenausgang entfernt wurde. Nehmen Sie bei einer Eingangsspannung USt von 0, 2, 4, 6, 8 und 10 V die drehzahlproportionale Spannung UN für folgende Einstellungen auf:
2.1 ohne Generatorlast (SG offen) 2.2 mit Generatorlast (SG geschlossen)
Skizzieren Sie jeweils für die verschiedenen Eingangsspannungen das Oszillogramm.
April 2012 Prof. Hartenstein Seite 4 von 12 Prof. Lindemann
Labor Mechatronik Versuch BV-1 Elektrische Antriebstechnik
Der Versuchsaufbau für die Teilversuche 2-5 besteht aus den Baugruppen:
• Stromversorgung (Bild 4) • Drehstrom-Asynchronmotor (Bild 5) • Frequenzumrichter (Bild 6) und • Servomaschinenprüfstand (Bild 7) (siehe Anlage)
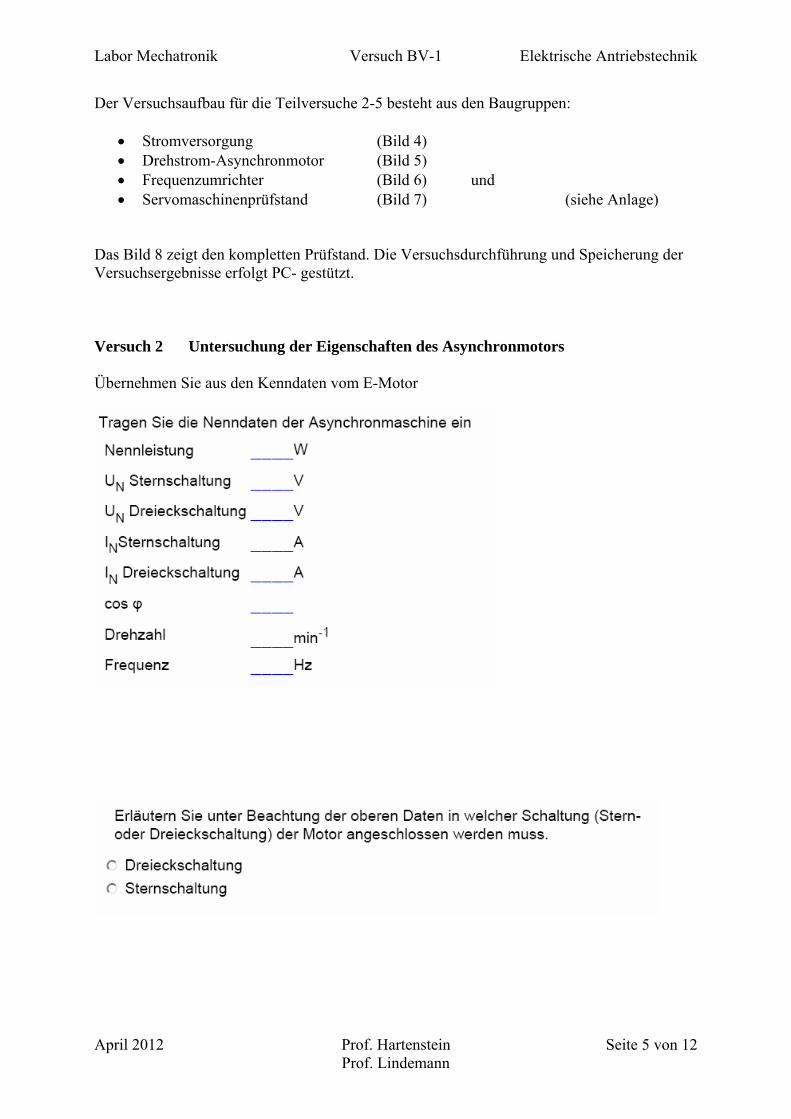
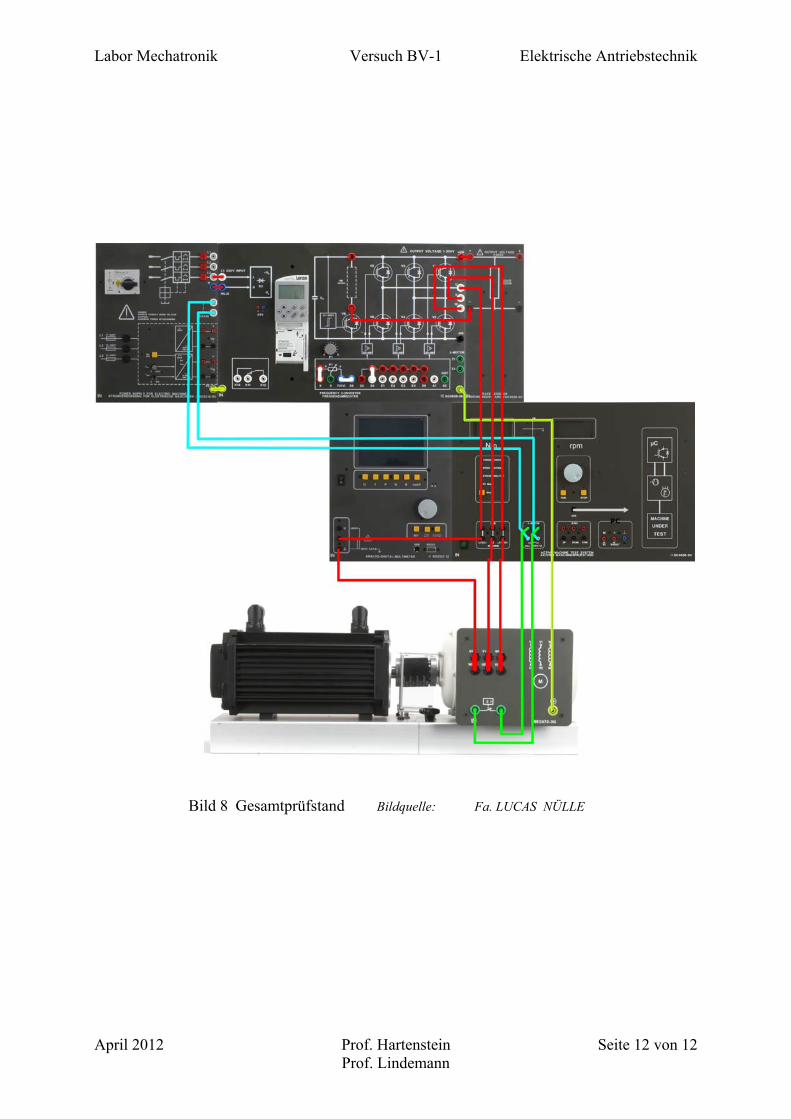
Das Bild 8 zeigt den kompletten Prüfstand. Die Versuchsdurchführung und Speicherung der Versuchsergebnisse erfolgt PC- gestützt. Versuch 2 Untersuchung der Eigenschaften des Asynchronmotors Übernehmen Sie aus den Kenndaten vom E-Motor
April 2012 Prof. Hartenstein Seite 5 von 12 Prof. Lindemann
Labor Mechatronik Versuch BV-1 Elektrische Antriebstechnik
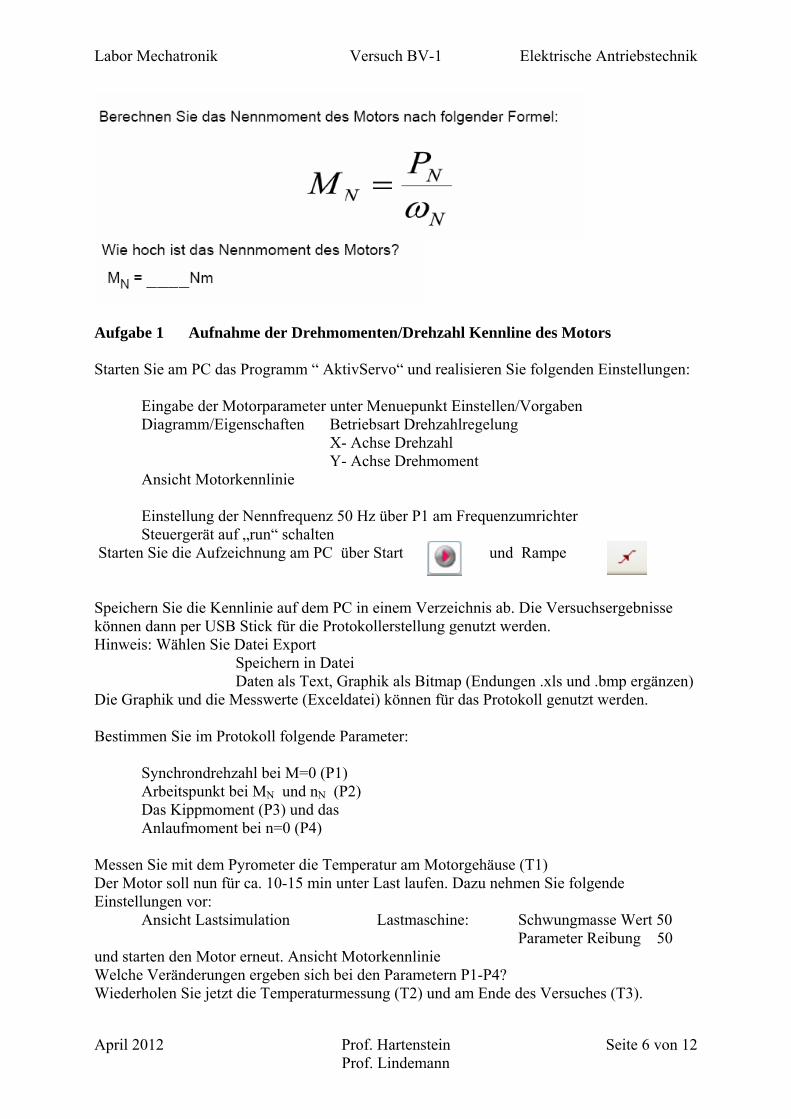
Aufgabe 1 Aufnahme der Drehmomenten/Drehzahl Kennline des Motors Starten Sie am PC das Programm “ AktivServo“ und realisieren Sie folgenden Einstellungen: Eingabe der Motorparameter unter Menuepunkt Einstellen/Vorgaben Diagramm/Eigenschaften Betriebsart Drehzahlregelung X- Achse Drehzahl Y- Achse Drehmoment Ansicht Motorkennlinie Einstellung der Nennfrequenz 50 Hz über P1 am Frequenzumrichter Steuergerät auf „run“ schalten Starten Sie die Aufzeichnung am PC über Start und Rampe Speichern Sie die Kennlinie auf dem PC in einem Verzeichnis ab. Die Versuchsergebnisse können dann per USB Stick für die Protokollerstellung genutzt werden. Hinweis: Wählen Sie Datei Export Speichern in Datei Daten als Text, Graphik als Bitmap (Endungen .xls und .bmp ergänzen) Die Graphik und die Messwerte (Exceldatei) können für das Protokoll genutzt werden. Bestimmen Sie im Protokoll folgende Parameter: Synchrondrehzahl bei M=0 (P1) Arbeitspunkt bei MN und nN (P2) Das Kippmoment (P3) und das Anlaufmoment bei n=0 (P4) Messen Sie mit dem Pyrometer die Temperatur am Motorgehäuse (T1) Der Motor soll nun für ca. 10-15 min unter Last laufen. Dazu nehmen Sie folgende Einstellungen vor: Ansicht Lastsimulation Lastmaschine: Schwungmasse Wert 50 Parameter Reibung 50 und starten den Motor erneut. Ansicht Motorkennlinie Welche Veränderungen ergeben sich bei den Parametern P1-P4? Wiederholen Sie jetzt die Temperaturmessung (T2) und am Ende des Versuches (T3).
April 2012 Prof. Hartenstein Seite 6 von 12 Prof. Lindemann
Labor Mechatronik Versuch BV-1 Elektrische Antriebstechnik
Aufgabe 2 Aufnahme der Drehmomenten/Drehzahl Kennline des Motors in Abhängigkeit von der Frequenz Nehmen Sie in einem Diagramm die Drehmomenten/Drehzahl Kennline bei verschieden Frequenzen auf. (Abspeicherung wie oben) Einstellungen: a) Nennfrequenz 50 Hz Einstellung über P1 am FU b) Frequenz 40 Hz Brücke E1 und E2 c) Frequenz 30 Hz Brücke E2 d) Frequenz 20 Hz Brücke E1 e) Frequenz 10 Hz Einstellung über P1 am FU f) Frequenz 60 Hz Einstellung über P1 am FU Achtung: Vor Frequenzumschaltung Motor ausschalten Vergleichen Sie die Kennlinien und Stellen Sie die Werte Leistungspunkt P1-P4 in einer Tabelle gegenüber. Welche Folgen hat die Erhöhung der Frequenz über 50 Hz? Aufgabe 3 Aufnahme weiterer Kennwerte des Motors Der Motor soll nun wieder unter Last laufen. Dazu nehmen Sie folgende Einstellungen vor: Ansicht Lastsimulation Nennfrequenz 50 Hz Lastmaschine: Schwungmasse Wert 50 Parameter Reibung 50 Ansicht Motorkennlinie, Diagramm y-Achsen Folgende Größen sollen erfasst werden: Moment Mmax= 6,0 Nm Mechanische Leistung P2max= 600W Schlupf Leistungsfaktor cosφ Maximalwert 1 Wirkungsgrad Maximalwert 100% Bringen Sie alle Größen in eine Graphik und diskutieren Sie den Verlauf im Protokoll! (Abspeicherung wie oben) Aufgabe 4 Lastverhalten von elektrischen Maschinen
Einstellung: Ansicht Lastmaschine Diagramm y-Achse Anzeige Drehmoment Nehmen Sie die Kennlinie der Asynchronmaschine in konstanten Drehzahlschritten auf. Stellen Sie anschließend nacheinander folgende Lasten ein und variieren Sie die zu der entsprechenden Last gegebenen Parameter.
April 2012 Prof. Hartenstein Seite 7 von 12 Prof. Lindemann

Labor Mechatronik Versuch BV-1 Elektrische Antriebstechnik
Ansicht Lastsimulation 4.1: Konstante Last Um auf konstante Last zu schalten, wählen Sie im Menü Einstellungen → Lastmaschine → Hubantrieb. Beginnen Sie mit einer Nulllast (0 Nm). Erhöhen Sie langsam den Lastparameter
schrittweise in 0,2 -Nm-Schritten bis zum Erreichen des Drehmomentenmaximums. Diskutieren Sie das Verhalten. Begründen Sie dieses im Protokoll. Nach dem Start Werte mit F8 auf der Graphik speichern.
4.2: Drehzahlabhängige Last
Um auf drehzahlabhängige Last zu schalten, wählen Sie im Menü Einstellungen → Lastmaschine → Pumpe/Ventilator. Beginnen Sie mit einer geringen Last (Lastwert = 0). Erhöhen Sie langsam den
Lastparameter „Lastkonstante“ schrittweise in 2 er-Schritten bis zum Erreichen des Drehmomentenmaximums. Diskutieren Sie das Verhalten. Begründen Sie dieses im Protokoll.
4.3: Rolle
Schalten Sie auf Rollenlast um. Wählen Sie im Menü Einstellungen → Lastmaschine → Wickelantrieb. Stellen Sie den Parameter „Lastkonstante1“ auf 6 und den Parameter
„Lastkonstante2“ auf 1. Starten Sie die Simulation der Last und beobachten Sie das Verhalten der elektrischen Antriebsmaschine. Begründen Sie dieses im Protokoll. Anzeige Zeitdiagramm, grüner Button; Messzeit 100s
4.4: Kompressor
Schalten Sie auf Kompressor um. Wählen Sie im Menü
Einstellungen → Lastmaschine → Kompressor. Anzeige Zeitdiagramm Wählen Sie für die Parameter folgende Einstellungen: Tankinhalt = 1000 l, Hub = 20 mm Messzeit 20s Tankinhalt = 1000 l, Hub = 1 mm Messzeit 20s Tankinhalt = 10000 l, Hub = 1 mm Messzeit 100s Tankinhalt = 10000 l, Hub = 20 mm Messzeit 100s Starten Sie die Simulation der Last und beobachten Sie das Verhalten der
elektrischen Antriebsmaschine. Begründen Sie dieses im Protokoll.
April 2012 Prof. Hartenstein Seite 8 von 12 Prof. Lindemann

Labor Mechatronik Versuch BV-1 Elektrische Antriebstechnik
Anlagen:
Bild 4 Stromversorgung Bildquelle: Fa. LUCAS NÜLLE
Bild 5 Drehstrom-Asynchronmotor Bildquelle: Fa. LUCAS NÜLLE
April 2012 Prof. Hartenstein Seite 9 von 12 Prof. Lindemann

Labor Mechatronik Versuch BV-1 Elektrische Antriebstechnik
Bild 6 Frequenzumrichter Bildquelle: Fa. LUCAS NÜLLE Der Frequenzumrichter ist ein didaktisch aufbereiteter Industrieumrichter neuester Generation. Der Frequenzumrichter ermöglicht neben den Betriebsarten lineare und quadratische U/f-Kennlinie auch die Vektorregelung. Die Bedienung des Frequenz-Umrichters erfolgt alternativ mittels Potentiometer, analoger Leitspannung, mit der LCD-Bedieneinheit, durch PC und Software oder über eine Feldbusschnittstelle.
Bild 7 Servomaschinenprüfstand Bildquelle: Fa. LUCAS NÜLLE
April 2012 Prof. Hartenstein Seite 10 von 12 Prof. Lindemann

Labor Mechatronik Versuch BV-1 Elektrische Antriebstechnik
April 2012 Prof. Hartenstein Seite 11 von 12
Prof. Lindemann
Labor Mechatronik Versuch BV-1 Elektrische Antriebstechnik
April 2012 Prof. Hartenstein Seite 12 von 12 Prof. Lindemann
Bild 8 Gesamtprüfstand Bildquelle: Fa. LUCAS NÜLLE


















