
Analy/cal Methods for Electrical Engineering Tamara Bonaci
71
EE 590 B PMP: Analy/cal Methods for Electrical Engineering Autumn 2016 Tamara Bonaci [email protected] Thank you to Professor Maryam Fazel for sample slides and materials.
Transcript of Analy/cal Methods for Electrical Engineering Tamara Bonaci

EE590BPMP:Analy/calMethodsforElectricalEngineering
Autumn2016
Tamara Bonaci [email protected]
Thank you to Professor Maryam Fazel for sample slides and materials.

Signals
10/19/16
Signalsaresetsofinforma/onordatathatcanbemodeledasfunc/onsofoneormoreindependentvariables(oHen/meorspace)
EE 590 B, Autumn 2016 – Lecture 4
Signals• Signals are sets of information or data that can be
modeled as functions of one or more independent variables (often time or space)
1d 2d 3dWe will focus on the single variable case…
2

System
10/19/16
Asystemdescribesarela/onshipbetweeninputandoutputsignals
EE 590 B, Autumn 2016 – Lecture 4
More examples of systemsComplex, dynamical, interconnected systems, lots
of inputs and outputs…
3

10/19/16 EE 590 B, Autumn 2016 – Lecture 4
5
System Properties
1 1{ ( )} ( )T x t y t
2) Time-invariance: A System is Time-Invariant if it meets this criterion:
3) Stability: A System is BIBO Stable if it meets this criterion:
“System Response to a linear combination of inputs is the linear combination of
the outputs.”
“System Response is the same no
matter when you run the system.”
“The system doesn’t blow up if given reasonable
inputs.”
1) Linearity: A System is Linear if it meets the following two criteria:
Additivity:
Scaling:
{ ( )} ( )T x t y t 0 0{ ( )} ( )T x t t y t t� �If then
BIBO = “Bounded input, bounded output”
| ( ) |x t M td � f � | { ( )} | | ( ) |T x t y t L t d � f �If then
2 2{ ( )} ( )T x t y t
1 2 1 2{ ( ) ( )} { ( )} { ( )}T x t x t T x t T x t� �
If and
Then
{ ( )} ( )T x t y t If { ( )} { ( )}T ax t aT x t then
SystemProper/es
4

SimpleExamplesofSystem
10/19/16 EE 590 B, Autumn 2016 – Lecture 4
6
System Properties
4) Invertibility:A System is Invertible if it meets this criterion:
5) Causality:A System is Causal if it meets this criterion:
“If you know the output signal, then you know exactly what the input
signal was.”
“The system does not anticipate the input.”
(It does not laugh before it’s tickled!)
6) Memory: A System is Memoryless if it meets this criterion:
The output depends only on current or past values of the input.
You can undo the effects of the system.
{ ( )} ( ) . . { ( )} { { ( )}} ( )i i iT x t y t T s t T y t T T x t x t � � If
If T{x(t)}=y(t) then y(t+a) depends only on x(t+b) where b<=a
If T{x(t)}=y(t) then y(t+a) depends only on x(t+a)(If a system is memoryless, it is also causal.)
“The output depends only on the current value
of the input.”
SystemProper/es
5

BuildingSignalsfromImpulses
10/19/16 EE 590 B, Autumn 2016 – Lecture 4
6
8
Another View: Building Signals from Impulsesx(t)
t
G'(t)
t
'
1/'
( ) ( ) ( )
lim 0 : ,
( ) ( ) ( )
k
x t x k t k
k d
x t x t d
G
W W
W G W W
''
f
�f
' ' � '
'o 'o 'o
�
¦
³

10/19/16 EE 590 B, Autumn 2016 – Lecture 4 7
ImpulseResponseofanLTISystem
18
Another View
{ ( )} { ( ) ( ) }T x t T x t dW G W Wf
�f
�³
An LTI system can be completely described by its impulse response!
LINEARITY( ) { ( )}x T t dW G W W
f
�f
�³TIMEINVARIANCE( ) ( )x h t dW W W
f
�f
�³

10/19/16 EE 590 B, Autumn 2016 – Lecture 4 8
TheConvolu/onIntegral
9
The Convolution Integral
( ) ( )* ( ) ( ) ( )y t x t h t x h t dW W Wf
�f
�³function of W
=h(-(W-t))function of W, flipped and shifted by t
W, not t

10/19/16 EE 590 B, Autumn 2016 – Lecture 4 9
StepResponse
46
Convolution of the impulse response of an LTI system with a unit step
( )* ( ) ( ) ( ) ( )h t u t h u t d s tW W Wf
�f
� ³produces its step response, s(t)
Step Response

10/19/16 EE 590 B, Autumn 2016 – Lecture 4 10
Tes/ngSystemProper/esGivenanImpulseResponseh(t)

10/19/16 EE 590 B, Autumn 2016 – Lecture 4 11
Tes/ngSystemProper/esGivenanImpulseResponseh(t)
Sinceimpulseresponseh(t)fullyspecifiesanLTIsystem,wecanuseitinpropertytes/ng

10/19/16 EE 590 B, Autumn 2016 – Lecture 4 12
CausalityandImpulseResponseh(t)
4
Causality of LTI SystemsA system is causal if the output does not depend on future times of the input.
( ) ( ) ( )y t h x t dW W Wf
�f
�³
For an LTI system: general convolution formula
If LTI system is causal, we have:
0
( ) ( ) ( )y t h x t dW W Wf
�³
An LTI system is causal if h(t)=0 for t<0

10/19/16 EE 590 B, Autumn 2016 – Lecture 4 13
CausalityandImpulseResponseh(t)
5
Causality of LTI systems
An LTI system is causal if and only if its impulse response h(t) is a “causal signal” (that is, h(t)=0 for all t<0)
If h(t) is causal, h(t-W)=0 for all (t-W )<0 or all t < W
Only Integrate to t for causal
systems
( ) ( ) ( )t
y t x h t dW W W�f
�³
( ) ( ) ( )y t x h t dW W W�f
�f
�³
10/19/16 EE 590 B, Autumn 2016 – Lecture 4 14
StepResponseandCausality
7
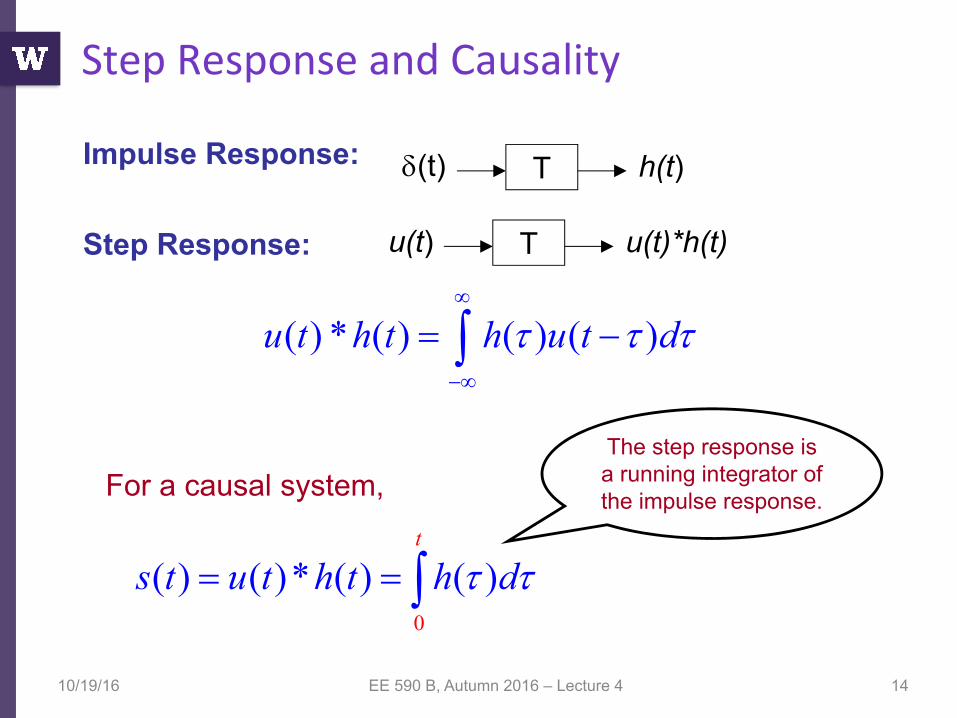
Step Response and Causality
Step Response: T u(t)*h(t)u(t)
Impulse Response: T h(t)G(t)
The step response is a running integrator of the impulse response.
( ) ( ) * ( ) ( ) ( )s t u t h t h u t dW W Wf
�f
�³�
For a causal system,
0
( ) ( )* ( ) ( )t
s t u t h t h dW W ³

10/19/16 EE 590 B, Autumn 2016 – Lecture 4 15
BIBOStabilityandImpulseResponseh(t)
Bounded inputsystem
Bounded output
B1 , B2, B3 are constants
An LTI system is BIBO stable if
Integral of abs value of impulse response must be finite
Stability of LTI Systems
3( )h d BW W�f
�f
d � f³

10/19/16 EE 590 B, Autumn 2016 – Lecture 4 16
BIBOStabilityandImpulseResponseh(t)
Bounded input
system
Bounded output
B1 , B2, B3 are constants
Because system is LTI.
abs(sum) <= sum(abs)
Show that
is sufficient for BIBO stability for an LTI system.
abs(prod) = prod(abs)
by assumption
if

10/19/16 EE 590 B, Autumn 2016 – Lecture 4 17
Exponen/alResponseofanLTISystem

10/19/16 EE 590 B, Autumn 2016 – Lecture 4 18
Exponen/alResponseofanLTISystemExponential response of LTI system
T h(t) (Impulse response)
T
T Exponential resp.
∗
∗
s in general is complex (s= )

10/19/16 EE 590 B, Autumn 2016 – Lecture 4 19
Exponen/alResponseofanLTISystemExponential response of LTI system
For a given s, output is just a constant times the input!
Input
Output

10/19/16 EE 590 B, Autumn 2016 – Lecture 4 20
FrequencyViewofSignals

10/19/16 EE 590 B, Autumn 2016 – Lecture 4 21
TheViolin The violin
G3
D4
A4
E5
196 Hz
293.66 Hz
440 Hz
659.26 Hz
Fundamental frequencies
10/19/16 EE 590 B, Autumn 2016 – Lecture 4 22
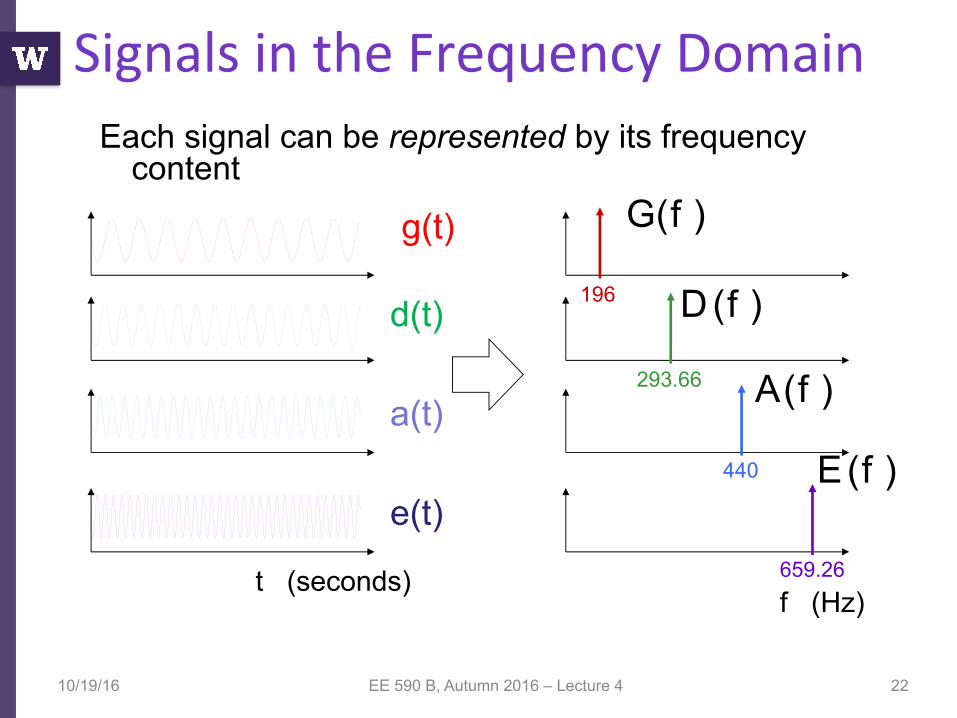
SignalsintheFrequencyDomainSignals in the frequency domain
196
293.66
440
659.26
Each signal can be represented by its frequency content
G(f )
D (f )
A(f )
E (f )
t (seconds)f (Hz)
g(t)
d(t)
a(t)
e(t)

10/19/16 EE 590 B, Autumn 2016 – Lecture 4 23
AnExamplePeriodicSignalPeriodic Examples
TIME
FREQ
flute ‘ae’ as in ‘bat’
fundamental frequency
harmonics
fundamental period

10/19/16 EE 590 B, Autumn 2016 – Lecture 4 24
FourierSeries

10/19/16 EE 590 B, Autumn 2016 – Lecture 4 25
FourierSeries:Intui/onBasicidea:• Youcanbuildsignalsoutofsinusoids,orequivalently,
outofcomplexexponen/als(CEs)Forperiodicsignals:• YouoHendon’tneedtomanysinusoids/CEs• Theonesthatyouneedallhavefrequenciesthatrelate
totheoriginalperiodFornon-periodicsignals:• Youneedacon/nuum(hint:FourierTransform)

10/19/16 EE 590 B, Autumn 2016 – Lecture 4 26
FourierSeries:Intui/onThe Basic Idea
+

10/19/16 EE 590 B, Autumn 2016 – Lecture 4 27
FourierSeries:BasicIdeabasic idea:
Hz440 880
time
time
time

• Sinusoidsaredescribedintermsoffrequency,whichlinkstoarepresenta/onthatourearsuse
• Harmonicallyrelatedsinusoidsare‘orthogonal’
– Orthogonalitysimplifiesmathema/calanalysis
• Sinusoidsarebuiltfromcomplexexponen/als– PassingthroughLTIsystemsjustscalescomponents– Convolu/onin/mebecomesscalingforeachcosine
10/19/16 EE 590 B, Autumn 2016 – Lecture 4 28
WhySinusoids?

• Vectorscanberepresentedassumsoforthogonalvectors
• Signalscanberepresentedassumsoforthogonalsignals
10/19/16 EE 590 B, Autumn 2016 – Lecture 4 29
SignalRepresenta/on
Signal Representation
x
y a = 2x + y
Vectors can be represented as a sum of orthogonal vectors.
Signals can be represented as a sum of orthogonal signals.

10/19/16 EE 590 B, Autumn 2016 – Lecture 4 30
VectorOrthogonalityVector Orthogonality
Dot product between two vectors f and x
Angle betweenthe vectors
Vectors and signals are orthogonal if their dot product is zero.
f
x
aka inner productaka scalar product

10/19/16 EE 590 B, Autumn 2016 – Lecture 4 31
SignalOrthogonalitySignal Orthogonality
then real signals f and x are orthogonal from time to time
For d-dimensional vectors a and b, dot product is
Similarly for signals f and x, dot product is
·
· 0
· ∗ 0 for complex signals
If

10/19/16 EE 590 B, Autumn 2016 – Lecture 4 32
FourierSerieswithComplexExponen/als
10/19/16 EE 590 B, Autumn 2016 – Lecture 4 33
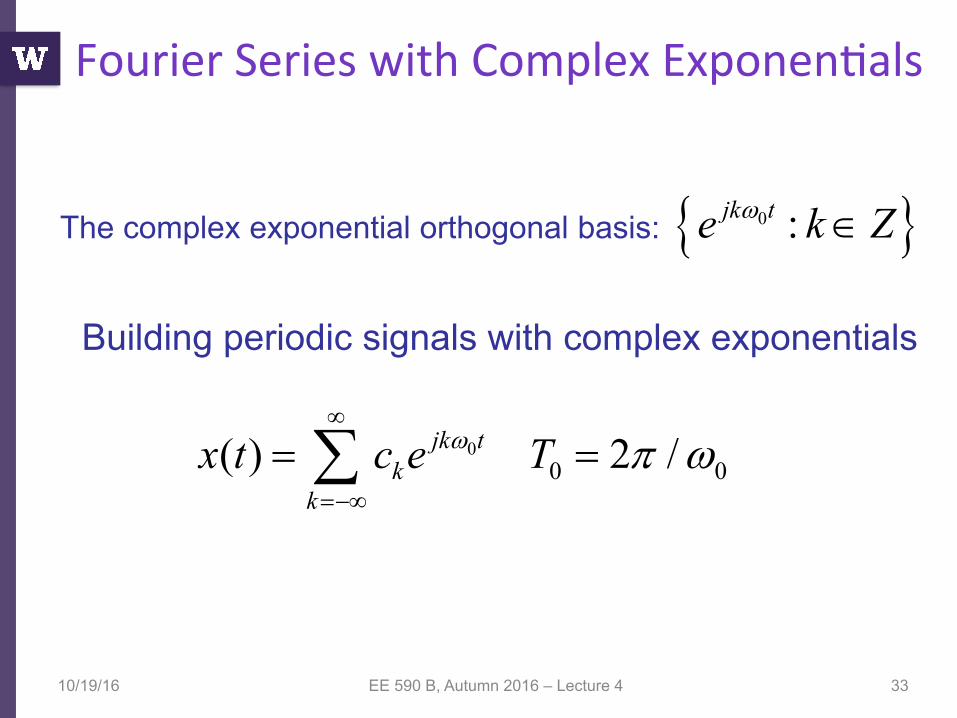
FourierSerieswithComplexExponen/alsFourier Series with Complex Exps
00 0( ) 2 /jk t
kk
x t c e TZ S Zf
�f
¦
Building periodic signals with complex exponentials
We’ll come back to the cosine version later
^ `0 :jk te k ZZ �The complex exponential orthogonal basis:

10/19/16 EE 590 B, Autumn 2016 – Lecture 4 34
BuildingPeriodicSignalswithComplexExponen/als–Example1Easy Example 1
0( ) 1 cos(5 .6) 5, 2 / 5x t t TZ S � �
0 0
(.6) (.6)0 0 0
( .6) ( .6)
0 (1) ( 1)
1( ) 1 ( )
21 12 2
j j
j t j t
t j t j t
x t e e
e e e e e
Z Z
Z Z Z�
� � �
�
� �
� �
0 1c 0.61 0.5 jc e
0.61 0.5 jc e��
ck = 0 for all other k

10/19/16 EE 590 B, Autumn 2016 – Lecture 4 35
BuildingPeriodicSignalswithComplexExponen/als–Example2Easy Example 2
( ) cos( ) 3sin(2 ) cos(5 .6)x t t t t � � �
0 (2 , , 2 / 5) 2T LCM S S S S 0 1Z
0 0
0 0
0 0
2 2
(5 .6) (5 .6)
1( ) ( )
23( )
21( )2
j t j t
j t j t
j t j t
x t e e
e ej
e e
Z Z
Z Z
Z Z
�
�
� � �
�
� �
� �
1 1 0.5c c�
(.6) (0.6) *5 5 51 1
;2 2
j jc e c e c��
*2 2 2
3 3;
2 2c c c
j j�
�
ck = 0 for all other k

10/19/16 EE 590 B, Autumn 2016 – Lecture 4 36
TheComplexExponen/alBasis:KeyQues/onsKey Questions
1. Is this an orthogonal basis?
2. How can we find a signal’s representation in this basis?
3. What signals can be represented in this basis?
4. What other bases are equivalent?
^ `0 :jk te k ZZ �The complex exponential basis:
10/19/16 EE 590 B, Autumn 2016 – Lecture 4 37
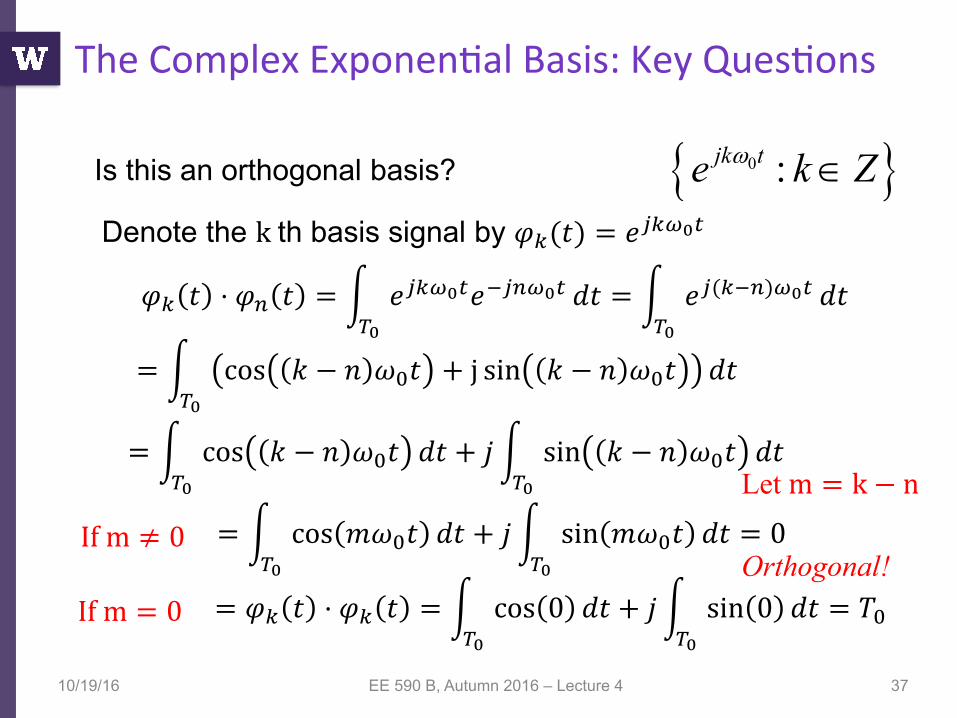
TheComplexExponen/alBasis:KeyQues/onsThe Complex Exponential Basis
Is this an orthogonal basis? ^ `0 :jk te k ZZ �
⋅
Denote the kth basis signal by
cos j sin
cos sin
cos sin 0Let m k n
Ifm 0
Ifm 0 ⋅ cos 0 sin 0Orthogonal!

10/19/16 EE 590 B, Autumn 2016 – Lecture 4 38
TheComplexExponen/alBasis:KeyQues/onsThe Complex Exponential Basis
00 0( ) 2 /jk t
kk
x t c e TZ S Zf
�f
¦
How can we find a signal’s representation in this basis?That is, how do we find for all k?
Easy case: sums of sines and cosines1. Find fundamental frequency2. Expand sinusoids into complex exponentials3. Write CEs in terms of k times the fundamental frequency4. Read off coefficients ck

10/19/16 EE 590 B, Autumn 2016 – Lecture 4 39
TheComplexExponen/alBasis:KeyQues/ons
Inner product is the length of a projected ontovector x/|x|
of x
of y
For a 2Dvector and2D orthogonalbasis
For a signal f(t)from t1 to t2and an orthogonalset of signals x1(t), x2(t), x3(t), … xN(t)
of
of
⋅⋅⋅⋅
⋅⋅
⋅⋅
⋅⋅⋅⋅
⋅⋅
Signal RepresentationHowmuchofeachbasis?

10/19/16 EE 590 B, Autumn 2016 – Lecture 4 40
TheComplexExponen/alBasis:KeyQues/onsHow much of each basis signal?
of
of
⋅⋅
⋅⋅
⋅⋅
How can we find a signal’s representation in this basis?That is, how do we find for all k?
Because are orthogonal, we need
of⋅⋅
Howmuchofeachbasis?
10/19/16 EE 590 B, Autumn 2016 – Lecture 4 41
TheComplexExponen/alBasis:KeyQues/ons
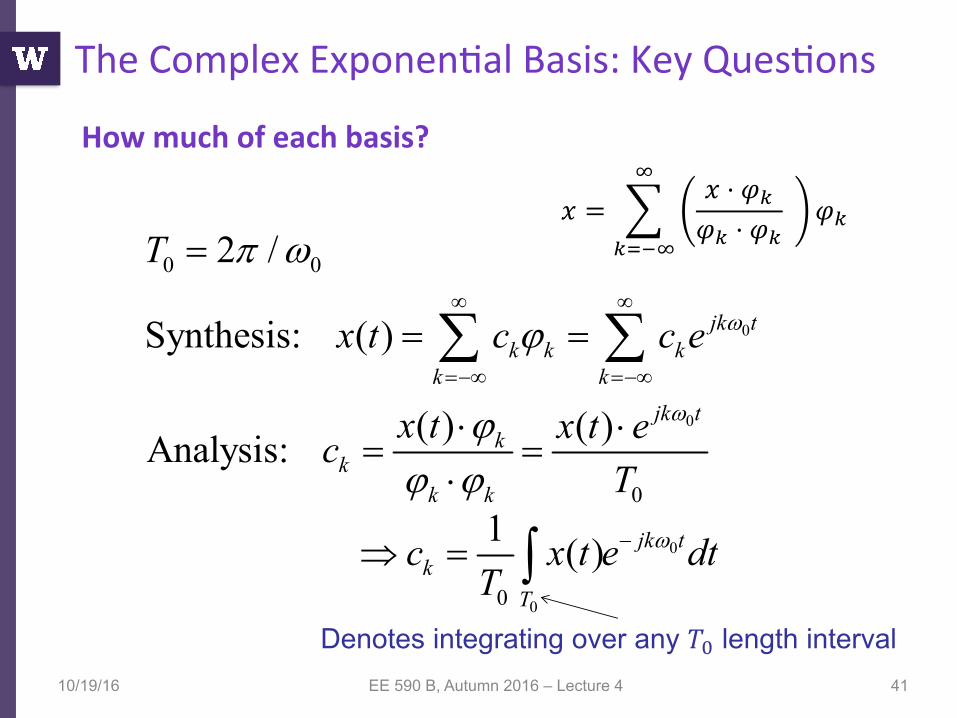
Howmuchofeachbasis?Fourier Series with Complex Exps
0
0
0 0
0
2 /
Synthesis: ( )
( ) ( )Analysis:
jk tk k k
k k
jk tk
kk k
T
x t c c e
x t x t ec
T
Z
Z
S Z
M
MM M
f f
�f �f
� �
�
¦ ¦
0
00
1 ( ) jk tk
T
c x t e dtT
Z�� ³
⋅⋅
Denotes integrating over any length interval

10/19/16 EE 590 B, Autumn 2016 – Lecture 4 42
TheComplexExponen/alBasis:KeyQues/onsFinding in general
0
0
0
0 0
0
Synthesis: ( ) 2 /
1Analysis: ( )
jk tk
k
jk tk
T
x t c e T
c x t e dtT
Z
Z
S Zf
�f
�
¦
³
How can we find a signal’s representation in this basis?That is, how do we find for all k?

10/19/16 EE 590 B, Autumn 2016 – Lecture 4 43
TheComplexExponen/alBasis:KeyQues/onsKey Questions
1. Is this an orthogonal basis?
2. How can we find a signal’s representation in this basis?
3. What signals can be represented in this basis?
4. What other bases are equivalent?
^ `0 :jk te k ZZ �The complex exponential orthogonal basis:

10/19/16 EE 590 B, Autumn 2016 – Lecture 4 44
TheComplexExponen/alBasis:KeyQues/onsWhat Signals Can Be Represented?
Aside: First, lets measure how good a representation is
^ `0 :jk te k ZZ �The complex exponential orthogonal basis:
⋅⋅
Error of an approximation using only first N harmonics.
| |
Energy of the error
Result:
If | | ∞, then
→ 0 as → ∞May not be equal everywhere

10/19/16 EE 590 B, Autumn 2016 – Lecture 4 45
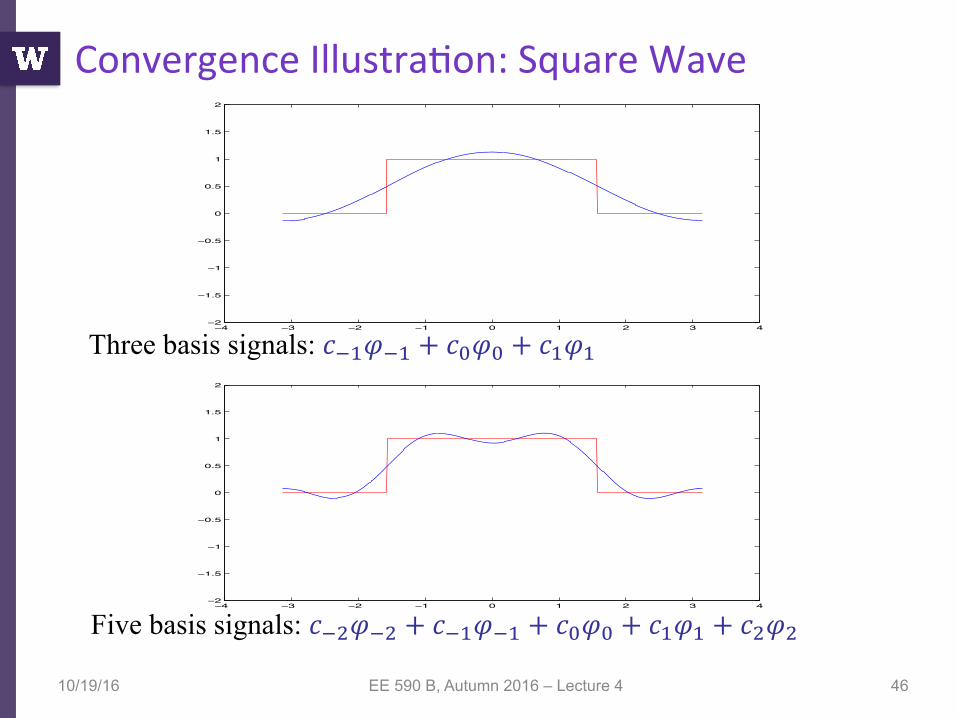
ConvergenceIllustra/on:SquareWaveIllustrating Convergence: Square Wave
−4 −3 −2 −1 0 1 2 3 4−2
−1.5
−1
−0.5
0
0.5
1
1.5
2
Goal f(t)
Firstbasis signal is just a constant.5(1)
−4 −3 −2 −1 0 1 2 3 4−2
−1.5
−1
−0.5
0
0.5
1
1.5
2
Onebasissignal
Three basis signals: ଵଵ ଵଵ
10/19/16 EE 590 B, Autumn 2016 – Lecture 4 46
ConvergenceIllustra/on:SquareWave
−4 −3 −2 −1 0 1 2 3 4−2
−1.5
−1
−0.5
0
0.5
1
1.5
2
−4 −3 −2 −1 0 1 2 3 4−2
−1.5
−1
−0.5
0
0.5
1
1.5
2
Making a square wave using cosines
Three basis signals: ଵଵ ଵଵ
Five basis signals: ଶଶ ଵଵ ଵଵ ଶଶ

10/19/16 EE 590 B, Autumn 2016 – Lecture 4 47
ConvergenceIllustra/on:SquareWaveMaking a square wave using cosines
−4 −3 −2 −1 0 1 2 3 4−2
−1.5
−1
−0.5
0
0.5
1
1.5
2
−4 −3 −2 −1 0 1 2 3 4−2
−1.5
−1
−0.5
0
0.5
1
1.5
2
Five basis signals:
Seven basis signals: ⋯

10/19/16 EE 590 B, Autumn 2016 – Lecture 4 48
GibbsEars Gibbs ears
−4 −3 −2 −1 0 1 2 3 4−2
−1.5
−1
−0.5
0
0.5
1
1.5
2
undershoot
Gibbs phenomenon: at discontinuous jumps –overshoot and undershoot of about 9%. Never really goes away as you add terms…
Does that keep our approximation error from getting small? No

10/19/16 EE 590 B, Autumn 2016 – Lecture 4 49
DirichletCondi/onsDirichlet Conditions
The Dirichlet conditions are:
1. | | ∞ (absolutely integrable over period)
2. Over any finite interval, has a finite number of maxima and minima
3. In any finite interval, has a finite number of discontinuities, and each discontinuity is finite
^ `0 :jk te k ZZ �The complex exponential orthogonal basis:
If the Dirichlet conditions hold, then:• The FS representation converges to except at
points of discontinuity, where it converges to the average value on either side
All practical, real-world periodic signals satisfy these conditions

10/19/16 EE 590 B, Autumn 2016 – Lecture 4 50
Key Questions
1. Is this an orthogonal basis?
2. How can we find a signal’s representation in this basis?
3. What signals can be represented in this basis?
4. What other bases are equivalent?
^ `0 :jk te k ZZ �The complex exponential orthogonal basis:
TheComplexExponen/alBasis:KeyQues/ons

10/19/16 EE 590 B, Autumn 2016 – Lecture 4 51
Addi/onalBasesAdditional Bases
0 0 01
0 0
( cos( ) cos( )
sin( ) sin( ))
k kk
k k
c c k t c k t
jc k t jc k t
Z Z
Z Z
f
�
�
� � �
� � �
¦
00 0( ) (cos( ) sin( ))jk t
k kk k
x t c e c k t j k tZ Z Zf f
�f �f
�¦ ¦
0 0 01
(( ) cos( ) ( )sin( )k k k kk
c c c k t j c c k tZ Zf
� �
� � � �¦
0 0 01
( cos( ) sin( ))k kk
a a k t b k tZ Zf
� �¦

10/19/16 EE 590 B, Autumn 2016 – Lecture 4 52
Sin/CosBasisSin/Cos Basis
0 0 01
( ) ( cos( ) sin( ))k kk
x t a a k t b k tZ Zf
� �¦
Basis Signals:
1cossincos 2sin 2cos 3sin 3
⋮
If is real, then , realChallenge: show this
Provides a real valued representation of real valued periodic signals
Basis set: harmonically related sinusoids
,

10/19/16 EE 590 B, Autumn 2016 – Lecture 4 53
CosBasis Cos Basis
0 01
( ) 2 cos( )k kk
x t d d k tZ Tf
� �¦Basis Signals:
1coscos 2cos 3
⋮
Basis set: harmonically related shifted cosines
,
For real …
Provides a real valued representation of real valued periodic signals

10/19/16 EE 590 B, Autumn 2016 – Lecture 4 54
FourierSeriesProper/esFourier Series Properties
0
( )( ) ( )( ) ( )( ) ( )
( ) ( )
x ty t ax t by t x aty t x t
y t x t t
l � l
l � l
� l 0 0
0 0
0 0
0,
,
k
y yk k
y yk k
yk k
jk tyk k
c
c ac k c ac b
c c a
c c
c c e Z
Z Z
�
�
z �
Added constant only affects constant term
Shift in time –t0 Add linear phase term –jkZ�t0
Time scale,a > 0 Same ck,
scale Z0reverse reverse
Linear ops

10/19/16 EE 590 B, Autumn 2016 – Lecture 4 55
Sped-upSignalsSped-up signals
Fourier spectra(FS coefficients shown vs index k)0
Double the speed of the time signal, what happens to the FS coeff’s?
and
0 0
0 0
21 1( ) (2 ) let 2
/ 2
1 1( ) / 2 ( )
/ 2
gjn t jn tgn
g
jn jnn
d g t e dt f t e dt tT T
f e d f e d dT T
Z Z
Z W Z W
W
W W W W
f f� �
�f �f
f f� �
�f �f
³ ³
³ ³ SAME!!
k

10/19/16 EE 590 B, Autumn 2016 – Lecture 4 56
Sped-upSignals
02( ) jn tn
ng t d e Z
f
�f
¦
Sped-up signals
Fourier spectra
0
and
The period of g(t) is T/2
Component frequencies are twice as far apart as f(t)’s
Double the speed of the time signal, what happens to the FS coeff’s?

10/19/16 EE 590 B, Autumn 2016 – Lecture 4 57
Sped-upSignalsspeed changes: same coefficients but need faster
or slower sinusoids…
MagnitudeFourier spectraof f(t)
0
0
0
MagnitudeFourier spectraof f(2t)
MagnitudeFourier spectraof f(t/2)
1
1
1
Note inverse time-frequency changes: more compact in time, more spread out in frequency
10/19/16 EE 590 B, Autumn 2016 – Lecture 4 58
ProblemProblem
Fourier series represents a periodic time signalby the sum of discrete frequency exponentials.
Many signals of interest are NOT periodic in time.
Is there any way to deal with them?

10/19/16 EE 590 B, Autumn 2016 – Lecture 4 59
FourierTransform

10/19/16 EE 590 B, Autumn 2016 – Lecture 4 60
FourierTransform:BasicIdeaFourier Transform: Basic IdeaStretch a periodic signal so that its period T goes to infinity.
Fourier SeriesIf we make T twice as longthen we need frequency components that are twice as slow (or half as fast),
0
Fourier Spectrafor T
Fourier Spectrafor 2T

10/19/16 EE 590 B, Autumn 2016 – Lecture 4 61
FourierFormulasFourier Formulas
Fourier series
Periodic functions w/ period
Fourier transform
Arbitrary practical signal
In general ck and F(jZ) are complex.
(memorize these formulas)
0( ) jn tn
nf t d e Z
f
�f
¦Synthesis: 12
Analysis: 1
FT:
Inverse FT:

10/19/16 EE 590 B, Autumn 2016 – Lecture 4 62
Nota/on/TerminologyNotation / Terminology Note
is really a function of – some people use instead
sometimes called the “spectrum” of
If is the impulse response of an LTI system, thenis called the “frequency response” of the system
will cover this more later…
usually referred to as the “Fourier transform” of
Short-hand notation:

10/19/16 EE 590 B, Autumn 2016 – Lecture 4 63
Nota/on/Terminology
Fourier transform:Decompose any “practical” signal into an integral (sum) of complex exponentials
Makes it easy to get the response of LTI systems
Finding the Fourier transform: Evaluate the integral.Or use cool tricks.

10/19/16 EE 590 B, Autumn 2016 – Lecture 4 64
FourierSymmetriesforRealValuedSignalsFourier Symmetries for Real-Valued Signals
Magnitude is even, phase is odd.
Fourier series
Periodic functions w/ period
Fourier transform
Arbitrary practical signal
0( ) jn tn
nf t d e Z
f
�f
¦Synthesis: 12
Analysis: 1
FT:
Inverse FT:
Real part is even, imaginary part is odd.Challenge: show this

10/19/16 EE 590 B, Autumn 2016 – Lecture 4 65
WhatSignalsHaveFourierTransform?
• Some signals blow up when you take the Fourier transform integral.• Those signals “don’t have” a Fourier transform.• Example: where 0
• Like the FS, we have sufficient conditions for the existence of a FT
What Signals Have a Fourier Transform?

10/19/16 EE 590 B, Autumn 2016 – Lecture 4 66
DirichletCondi/ons,Part2Dirichlet Conditions, Part 2The Dirichlet conditions for the Fourier Transform are:
1. | | ∞ (absolutely integrable)
2. Over any finite interval, has a finite number of maxima and minima
3. In any finite interval, has a finite number of discontinuities, and each discontinuity is finite
If the Dirichlet conditions hold, then:• The FT representation converges to except at
points of discontinuity, where it converges to the average value on either side
Most practical, real-world signals satisfy these conditions,(but some signals of theoretical importance do not )

10/19/16 EE 590 B, Autumn 2016 – Lecture 4 67
Example:FourierTransformofaRectFourier transform of a rect
Let
t-T/2 0 T/2
1
Find the Fourier transform:
Define
12

10/19/16 EE 590 B, Autumn 2016 – Lecture 4 68
Example:FourierTransformofaRectFourier transform of a rect: Plotted
t1
0 2 0 0 0 4 0 0 0 6 0 0 0 8 0 0 0 1 0 0 0 0 1 2 0 0 0-1
-0 . 5
0
0 . 5
1
1 . 5
2
2 . 5
3
0 w
-3/2 3/2

10/19/16 EE 590 B, Autumn 2016 – Lecture 4 69
SomeProper/esofFourierTransformSome Fourier transform properties
Scaling?
Additivity?
Convolution?
Time shift?
time domain Fourier transform

10/19/16 EE 590 B, Autumn 2016 – Lecture 4 70
SomeKnownFourierTransformsFourier Transforms You’ve Seen
0cos( )tZ 0 0( ) ( )SG Z Z SG Z Z� � �
0j te Z02 ( )SG Z Z�
0( )t tG � 0j te Z�
1 2 ( )SG Z
0sin( )tZ 0 0( ) ( )j jSG Z Z SG Z Z� � �
, 0

Resources
10/19/16 EE 590 B, Autumn 2016 – Lecture 4
71
Materialfortoday’slecturefrom:• A.V.Oppenheim,A.S.Willsky,SignalsandSystems,p.177–
205.• H.P.Hsu,Schaum’sOutlinesofTheoryandProblemsofSignals
andSystems,p.211–231.


















