
ANALITICKA GEOMETRIJA• - web.math.pmf.unizg.hr · Vektori 1.1 Vektorski prostori V1, V2, V3...
42
ANALITI ˇ CKA GEOMETRIJA Predavanja i zadaci za vjeˇ zbu ˇ Zeljka Milin ˇ Sipuˇ s i Mea Bombardelli Verzija 3.1. 12. 11. 2015.
Transcript of ANALITICKA GEOMETRIJA• - web.math.pmf.unizg.hr · Vektori 1.1 Vektorski prostori V1, V2, V3...

ANALITICKA GEOMETRIJA
Predavanja i zadaci za vjezbu
Zeljka Milin Sipus i Mea Bombardelli
Verzija 3.1.
12. 11. 2015.

Sadrzaj
1 Vektori 4
1.1 Vektorski prostori V 1, V 2, V 3 . . . . . . . . . . . . . . . . . . . . . . . . . . . . 4
1.2 Baza vektorskog prostora V 3. Koordinatizacija . . . . . . . . . . . . . . . . . . 13
1.3 Skalarni produkt. Ortonormirana baza . . . . . . . . . . . . . . . . . . . . . . . 23
1.4 Vektorski produkt . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 30
1.5 Mjesoviti produkt . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 37
1
Uvod i povijesni osvrt
Analiticka geometrija bavi se proucavanjem (klasicne) euklidske geometrije ravnine i pros-tora koristeci algebarske metode. Njen tvorac, Rene Descartes (1596-1650, lat. Renatus Carte-sius), u svom djelu1 napisanom 1619., a objavljenom tek 1637. godine, nazvao ju je i metodomkoordinata. Osnovna ideja analiticke geometrije je da se tocke ravnine i prostora opisuju ko-ordinatama, dakle, parovima ili trojkama realnih brojeva, a ostali objekti (pravci, ravnine,krivulje, plohe, itd.) jednadzbama. Prema tome, ispitivanje odnosa medu objektima svodi sena rjesavanje sustava jednadzbi.
Analiticka geometrija je vrlo rasirena metoda proucavanja euklidske geometrije i prisutna jeu mnogim granama matematike. Povijesno, imala je velik utjecaj i na razvoj diferencijalnogracuna.
Polaziste za uvodenje analiticke geometrije su euklidska ravnina ili prostor koje cemo ozna-cavati sa E2 i E3 i koji su aksiomatski zasnovani. Osnovne elemenate, tocku i pravac za E2,te jos ravninu za E3, ne definiramo, nego aksiomima, tj. prihvacenim istinama, opisujemonjihove osnovne medusobne odnose. Ostale odnose dokazujemo koristeci aksiome. Starogrckimatematicar Euklid (330 - 275 pr. Kr.) jos je u 3. stoljecu pr. Kr. u svom djelu Elementiaksiomatski zasnovao ravninu koju po njemu i nazivamo euklidskom ravninom. Euklid jepokusao ”definirati” i osnovne objekte u smislu da intuitivno objasni njihov smisao, pa je tocku”definirao” kao ono sto nema dijelova, krivulju kao duljinu bez sirine, pravac kao krivulju kojojsu sve tocke jednako rasporedene, a plohu kao ono sto nema samo duljinu, vec ima i sirinu.Euklidovi osnovni aksiomi su:
1. Od svake tocke do svake druge tocke moze se povuci pravac.
2. Omeden dio pravca moze se neprekidno produziti po pravcu.
3. Iz svakog sredista sa svakim polumjerom moze se opisati kruznica.
4. Svi su pravi kutovi jednaki.
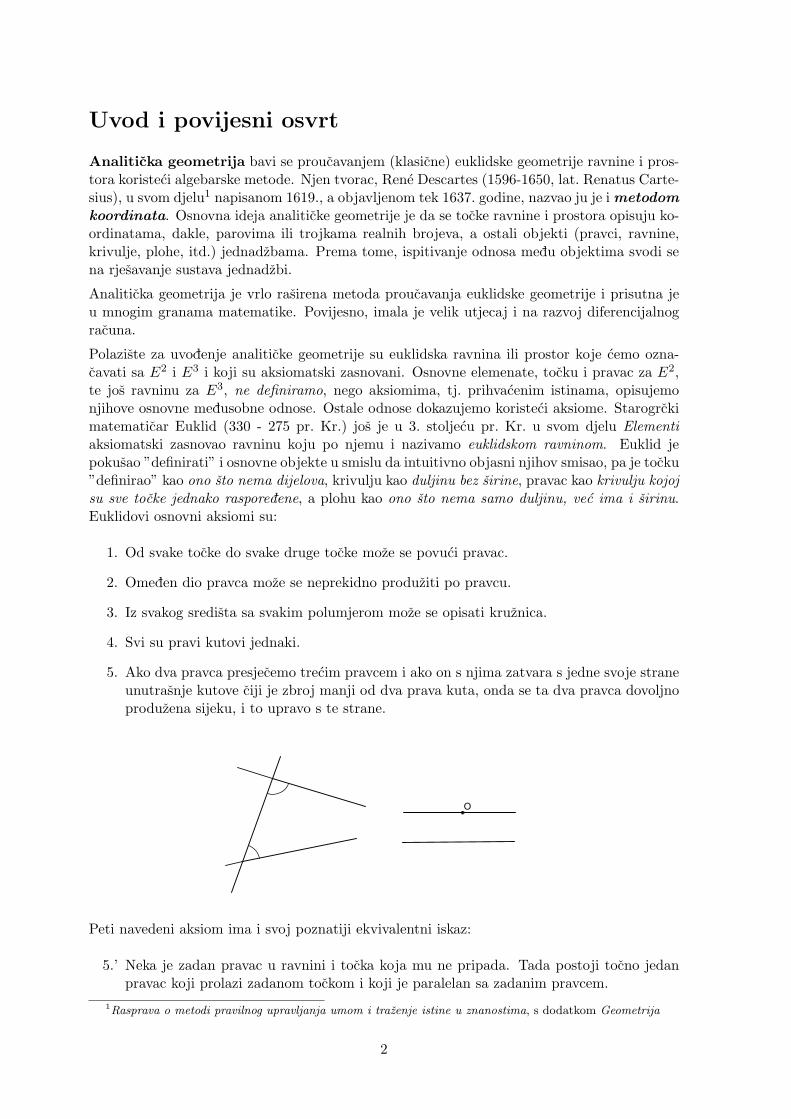
5. Ako dva pravca presjecemo trecim pravcem i ako on s njima zatvara s jedne svoje straneunutrasnje kutove ciji je zbroj manji od dva prava kuta, onda se ta dva pravca dovoljnoproduzena sijeku, i to upravo s te strane.
Peti navedeni aksiom ima i svoj poznatiji ekvivalentni iskaz:
5.’ Neka je zadan pravac u ravnini i tocka koja mu ne pripada. Tada postoji tocno jedanpravac koji prolazi zadanom tockom i koji je paralelan sa zadanim pravcem.
1Rasprava o metodi pravilnog upravljanja umom i trazenje istine u znanostima, s dodatkom Geometrija
2

Peti aksiom ima vrlo vazno povijesno znacenje – zbog svoje neobicne duljine smatralo se daje mozda vec on posljedica ostalih aksioma. Taj je problem bio nerijesen vise od 2000 godina,tek se u 19. stoljecu dokazalo da je peti aksiom zaista aksiom karakteristican za euklidskugeometriju, a njegovim negiranjem dobivamo nove geometrije, tzv. neeuklidske geometrije.
Danas postoje i preciznije aksiomatike, kao primjerice aksiomatika njemackog matematicaraDavida Hilberta (oko 1900. godine) i mnoge druge ekvivalentne aksiomatike (vidi knjige:B. Pavkovic, D. Veljan Elementarna matematika 1, 2 ).
Nase polaziste je, dakle, aksiomatski zasnovana euklidska ravnina ili prostor, pri cemu ko-ristimo bez dokaza neke cinjenice elementarne geometrije izvedene iz aksioma. Tek cemopovremeno naznaciti posljedice koristenja nekih (Euklidovih) aksioma. Osnovne definicije itvrdnje euklidske geometrije obraduju se u kolegiju Elementarna geometrija.
Recimo jos par rijeci o tvorcu metode koordinata – Reneu Descartesu. Osim sto je bio vrstani vrlo cijenjen matematicar, poznat je i po svom doprinosu filozofiji. Vrlo je cuvena njegovamisao ”Mislim, dakle jesam”. Predlagao je i univerzalnu metodu rjesavanja problema koja sesastojala od sljedeca tri koraka:
1. Zadacu bilo koje vrste svesti na matematicku.
2. Matematicku zadacu svesti na algebarsku.
3. Algebarsku zadacu svesti na rjesavanje jedinstvene jednadzbe.
No, i sam je uvidao njene granice. Prilagodujuci tu ideju, uvodenje metode koordinata zamislioje na sljedeci nacin:
1. Geometrijsku zadacu formulirati algebarski.
2. Algebarsku zadacu rijesiti.
3. Algebarsko rjesenje interpretirati geometrijski.
Uz metode analiticke geometrije u uzem smislu, koje uvodimo od drugog poglavlja, usko jevezan pojam vektora. Njega uvodimo u prvom poglavlju, u kojem definiramo i operacije s vek-torima: zbrajanje, mnozenje skalarom, skalarno mnozenje, te vektorsko i mjesovito mnozenje.U drugom poglavlju odredujemo razne oblike jednadzbe pravca u ravnini, te jednadzbe pravcai ravnine u prostoru. U trecem poglavlju definiramo elipsu, hiperbolu i parabolu, izvodimo nji-hove kanonske jednadzbe, te opcenito razmatramo krivulje zadane algebarskom jednadzbomdrugog stupnja. Koristeci geometrijske transformacije, prepoznajemo krivulje drugog redaprevodeci njihove jednadzbe na kanonski oblik. Na kraju, ukratko razmatramo i plohe 2. reda.
3

Poglavlje 1
Vektori
1.1 Vektorski prostori V 1, V 2, V 3
Vektor cesto zamisljamo kao duzinu sa strelicom:
¡¡
¡¡µ
Matematicka definicija vektora je ipak nesto slozenija, a ova intuitivna predodzba vise odgo-vara pojmu usmjerene ili orijentirane duzine. No, i tu trebamo biti precizniji: usmjerena iliorijentirana duzina je ureden par tocaka (A,B), A,B ∈ E3, dakle, element skupa E3×E3.Tu usmjerenu duzinu oznacavamo s
−−→AB, tocku A nazivamo pocetkom (pocetnom tockom), a
tocku B zavrsetkom ili krajem (zavrsnom ili krajnjom tockom) usmjerene duzine−−→AB. Usmje-
renoj duzini pridruzujemo i duzinu AB kojoj pri crtnji stavljamo i strelicu:
rA
rB
rA ¡¡
¡¡
¡µrB
Iz pojma usmjerene duzine gradi se pojam vektora. Jednostavno receno, vektor je skup svihparalelnih usmjerenih duzina jednake duljine:
¡¡
¡¡
¡µ
¡¡
¡¡
¡µ
¡¡
¡¡
¡µ
¡¡
¡¡
¡µ
¡¡
¡¡
¡µ
Da bismo precizno definirali pojam vektora, uvedimo najprije sljedecu relaciju na skupu svihusmjerenih duzina u E3 ×E3.
4

Definicija 1.1.1 Za usmjerene duzine−−→AB i
−−→CD kazemo da su ekvivalentne ako duzine AD
i BC imaju zajednicko poloviste. Pisemo−−→AB ∼ −−→
CD.
Na sljedecoj su slici prikazane ekvivalentne usmjerene duzine−−→AB i
−−→CD. Moguce su situacije:
tocke A,B,C, D ne leze na istom pravcu ili tocke A,B, C, D leze na istom pravcu.
U prvoj situaciji mozemo primijetiti da je cetverokut ABDC paralelogram. Zaista, sjetimose da je paralelogram cetverokut kojemu oba para nasuprotnih stranica leze na paralelnimpravcima, a to je ako i samo ako se dijagonale tog cetverokuta raspolavljaju.
rA ¤¤¤¤¤¤º
¡¡
¡¡
¡¡
¡¡
r D
ll
lll
r B
r P
r C¤¤¤¤¤¤º
rA rDrB rrP C
Prema tome, usmjerene duzine−−→AB i
−−→CD su ekvivalentne ako i samo ako je cetverokut ABDC
paralelogram ili tocke A,B, C,D leze na istom pravcu i pritom duzine AD i BC imaju za-jednicko poloviste. Odavde slijedi da je definicija relacije ∼ dobra (valjana) i na pravcu E1, uravnini E2 i u prostoru E3. Mi cemo je razraditi samo za E3.
Propozicija 1.1.1 Relacija ∼ je relacija ekvivalencije na skupu E3 × E3.
Dokaz. Refleksivnost i simetricnost relacije ∼ su ocite. Pokazimo tranzitivnost.
Neka je−−→AB ∼ −−→
CD,−−→CD ∼ −−→
EF .
Pretpostavimo da usmjerene duzine−−→AB,
−−→CD i
−−→EF leze na tri razlicita pravca u E3. Koristimo
i sljedecu karakterizaciju paralelograma: cetverokut ABDC paralelogram, ako i samo ako je|AB| = |CD| i pravci AB i CD su paralelni (|AB| oznacava duljinu duzine AB, a AB pravacodreden tockama A,B). Kako iz pretpostavke slijedi da je cetverokut ABDC paralelogram,to je pravac AB paralelan pravcu CD i duljina duzine AB je jednaka duljini duzine CD.Analogno, iz pretpostavke slijedi da je cetverokut CDFE paralelogram, pa je |CD| = |EF |i CD ‖ EF . No, kako su relacije paralelnosti i jednakosti duljina duzina tranzitivne, slijedi|AB| = |EF | i AB ‖ EF , tj. cetverokut ABFE je paralelogram. Prema tome je
−−→AB ∼ −−→
EF .
Slicno se pokazuje tranzitivnost i u ostalim slucajevima.
5

Relacija ekvivalencije rastavlja skup na kojem je definirana na disjunktne podskupove kojenazivamo klasama ekvivalencije. Svaka klasa ekvivalencije sastoji se od elemenata skupa kojisu medusobno ekvivalentni i samo od njih. Primijenimo li te cinjenice na skup E3×E3, imamosljedecu definiciju:
Definicija 1.1.2 Vektor je klasa ekvivalencije po relaciji ∼ na skupu svih usmjerenih duzinaE3 × E3. Skup svih vektora oznacavamo sa V 3.
Klasu ekvivalencije odredenu usmjerenom duzinom−−→AB oznacavat cemo sa [
−−→AB]. Dakle, vrijedi
[−−→AB] =
{−−→PQ ∈ E3 ×E3 | −−→PQ ∼ −−→
AB}
.
Vrijedi−−→AB ∈ [
−−→AB], pa kazemo da je usmjerena duzina
−−→AB predstavnik ili reprezentant
vektora [−−→AB].
Vektore krace oznacavamo i malim latinskom slovima sa strelicom −→a ,−→b , −→c ,. . . , −→v , −→w , −→x ,−→y , −→z .
Napomena. Promatrali smo prostor E3 s tockovnom strukturom i u njemu definirali vektore.Da smo krenuli od E1, odnosno E2, i na njima podrazumijevali tockovnu strukturu, te da smodefinirali usmjerene duzine i relaciju ∼ na isti nacin kao u E3, definirali bismo vektore napravcu, odnosno u ravnini. Odgovarajuce skupove vektora oznacavamo s V 1, V 2.
Uvedimo sad neke istaknute vektore.
Promotrimo najprije klasu [−→AA]. Koje usmjerene duzine pripadaju toj klasi?
Neka je−−→PQ ∈ [
−→AA]. Tada je
−→AA ∼ −−→
PQ, pa duzine AP i AQ imaju zajednicko poloviste. Toje moguce ako i samo ako je P = Q. Dakle,
[−→AA] =
{−−→PP | P ∈ E3
}.
Vektor [−→AA] nazivamo nulvektorom i oznacavamo
−→0 .
Nadalje, za vektor −→a = [−−→AB], definiramo vektor −−→a kao vektor s predstavnikom
−−→BA.
Vektor −−→a nazivamo suprotnim vektorom vektora −→a . Ocito vrijedi −(−−→a ) = −→a .
Vektorima mozemo birati predstavnike. Vrijedi sljedeca tvrdnja:
Propozicija 1.1.2 Neka je −→a = [−−→AB] i C ∈ E3. Tada postoji jedinstvena tocka D ∈ E3
takva da je −→a = [−−→CD].
Dokaz. Ako je −→a =−→0 , tada je B = A, pa je D = C.
Neka je −→a 6= −→0 . Ako tocke A,B,C leze na istom pravcu, onda je tocka D ona (jedinstvena)
tocka tog pravca takva da duzine AD i BC imaju zajednicko poloviste. Ako tocka C ne lezi napravcu AB, tada (po 5. Euklidovom aksiomu) postoji jedinstveni pravac koji prolazi tockomC paralelno s pravcem AB i jedinstveni pravac koji prolazi tockom B paralelno s pravcemAC. Presjek tih pravaca je trazena tocka D. Kako je zbog konstrukcije dobiveni cetverokutABDC paralelogram, to je
−−→CD ∼ −−→
AB.
U situaciji iz prethodne propozicije kazemo da smo vektor −→a nanijeli iz tocke C.
6
Za vektor definiramo i pojmove modula, smjera i orijentacije. Neka je −→a = [−−→AB]. Modul
ili duljina vektora −→a je duljina duzine AB. Modul oznacavamo |−→a |, dakle, |−→a | = |AB|.Ocito je definicija dobra, tj. ne ovisi o izboru predstavnika za vektor −→a . Naime, ako je
−−→CD
neki drugi predstavnik od −→a , tada je cetverokut ABDC paralelogram, pa su duzine AB i CDjednakih duljina. Slicno razmisljamo i ako tocke A, B, C, D leze na jednom pravcu. Uocimoda je nulvektor jedini vektor modula 0.
Smjer vektora−→a je smjer pravca AB. Pritom je smjer pravca definiran kao klasa ekvivalencijena skupu svih pravaca u E3 s obzirom na relaciju ekvivalencije ”biti paralelan”. Dakle, smjerpravca je klasa (skup) svih medusobno paralelnih pravaca. Ocito definicija smjera vektora neovisi o izboru predstavnika vektora. Za nulvektor smjer ne definiramo (i to je jedini takavvektor).
Kazemo da su vektori −→a i−→b kolinearni ako su istog smjera. Dogovorom usvajamo da je
nulvektor kolinearan sa svakim vektorom.
Orijentacija vektora je ”relativan” pojam, tj. definiramo je s obzirom na druge vektore,kolinearne s promatranim vektorom. Neka su −→a ,
−→b kolinearni vektori. Po propoziciji 1.1.2
mozemo odabrati njihove predstavnike s pocetkom u istoj tocki O, −→a = [−→OA],
−→b = [
−−→OB].
Kazemo da su vektori −→a ,−→b jednako orijentirani ako tocke A,B leze s iste strane tocke O,
a suprotno orijentirani ako leze s razlicitih strana.
¡¡
¡¡
¡¡
¡¡
rO
rA
rB
¡¡
¡¡
¡¡
¡¡
rA
rO
rB
Ocito vrijedi sljedeca tvrdnja:
Propozicija 1.1.3 Vektor je jednoznacno odreden svojim modulom, smjerom i orijentacijom.
Sljedeci nam je cilj definirati neke operacije s vektorima – pritom definiramo novi vektor kojegopisujemo na jedan od dva moguca nacina, ili preko predstavnika (koristeci definiciju vektora),ili modulom, smjerom i orijentacijom (koristeci propoziciju 1.1.3).
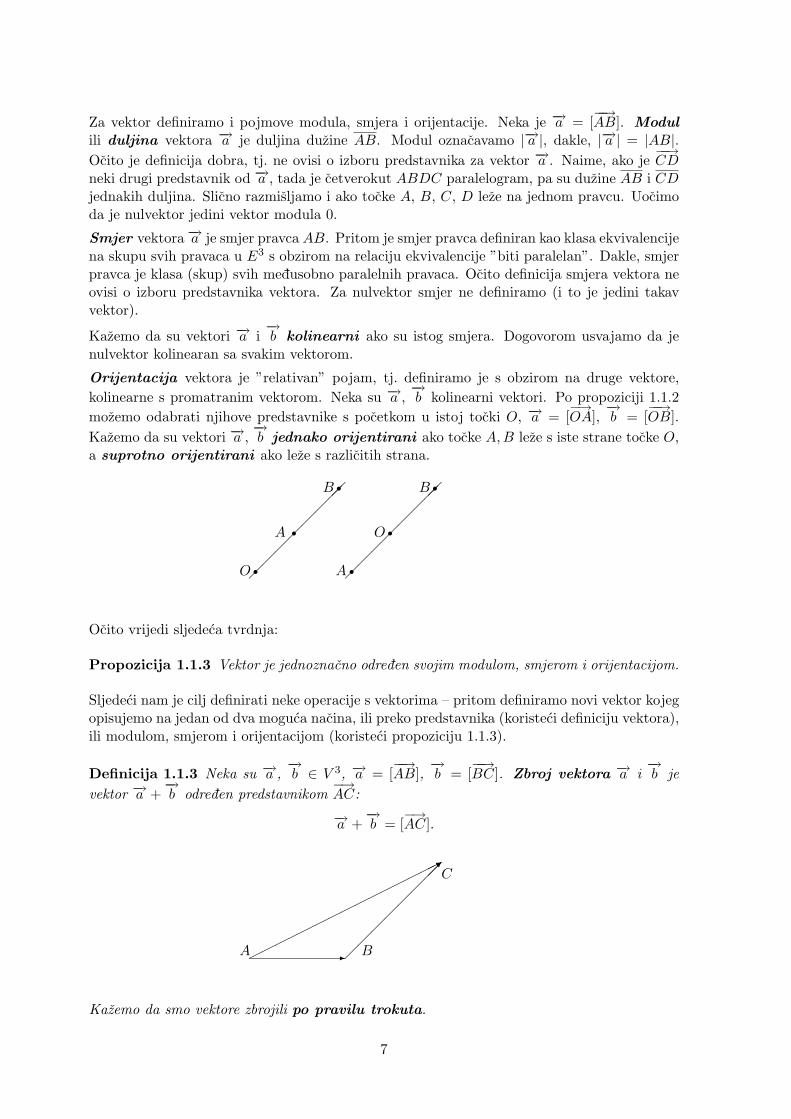
Definicija 1.1.3 Neka su −→a ,−→b ∈ V 3, −→a = [
−−→AB],
−→b = [
−−→BC]. Zbroj vektora −→a i
−→b je
vektor −→a +−→b odreden predstavnikom
−→AC:
−→a +−→b = [
−→AC].
-¡¡
¡¡
¡¡
¡¡µ
©©©©©©©©©©©©©©©*
A B
C
Kazemo da smo vektore zbrojili po pravilu trokuta.
7

Pokazimo da definicija zbroja ne ovisi o izboru predstavnika. Neka su −→a ,−→b dani i svojim
predstavnicima−−→A′B′,
−−→B′C ′. Tada su cetverokuti ABB′A′ i BCC ′B′ paralelogrami
-¡¡
¡¡¡µ
©©©©©©©©©*
A B
C-¡
¡¡
¡¡µ
©©©©©©©©©*
A′ B′
C ′
ÃÃÃÃÃÃÃÃÃÃÃÃÃÃÃ
ÃÃÃÃÃÃÃÃÃÃÃÃÃÃÃ
ÃÃÃÃÃÃÃÃÃÃÃÃÃÃÃ
pa su duzine AA′ i BB′ paralelne i jednakih duljina, kao i duzine BB′ i CC ′. Dakle, i duzineAA′ i CC ′ su paralelne i jednakih duljina. Stoga je cetverokut ACC ′A′ paralelogram. Odavdeje−→AC ∼ −−→
A′C ′. Slicno se tvrdnja pokazuje i u slucaju kad izabrane tocke leze na pravcu.
Zbrajanje vektora moze se definirati i na sljedeci nacin: neka je O ∈ E3 po volji izabrana tockai neka su −→a i
−→b dani svojim predstavnicima s pocetkom u tocki O, −→a = [
−→OA],
−→b = [
−−→OB].
Zbroj vektora −→a i−→b je vektor −→c = [
−−→OC], pri cemu je C jedinstvena tocka u E3 takva da je
cetverokut OACB paralelogram:−→a +
−→b = [
−−→OC]
-¡¡
¡¡
¡¡
¡¡µ
©©©©©©©©©©©©©©©*
¡¡
¡¡
¡¡
¡¡
O A
B C
Ovakav nacin zbrajanja vektora nazivamo zbrajanje vektora po pravilu paralelograma.
Ni ova definicija zbrajanja vektora ne ovisi o izboru predstavnika za vektore −→a ,−→b . Dokaz se
provodi na analogan nacin kao za pravilo trokuta.
Nadalje, izborom drugog predstavnika za vektor−→b ,
−→b = [
−→AC], lako se je uvjeriti da su
definicije zbrajanja vektora po pravilu trokuta i paralelograma ekvivalentne.
Sljedeca operacija koju definiramo je mnozenje vektora skalarom:
Definicija 1.1.4 Mnozenje vektora skalarom je operacija : R× V 3 → V 3 koja uredenomparu (α,−→a ) za α ∈ R\{0} i ~a ∈ V 3\{~0} pridruzuje vektor u oznaci α−→a kojemu je
1. modul: |α−→a | = |α||−→a |,2. smjer: isti kao smjer od −→a , ako su oba vektora −→a i α−→a razlicita od nulvektora,
3. orijentacija: jednaka kao orijentacija vektora −→a ako je α > 0 i suprotna od nje ako jeα < 0.
Ako je α = 0 ili −→a =−→0 , tada definiramo α−→a =
−→0 . Tu situaciju isticemo, jer za
−→0 ne
definiramo smjer.
8

Primijetimo da vrijedi:
Propozicija 1.1.4 α−→a =−→0 ako i samo ako je α = 0 ili −→a =
−→0 .
Zaista, ako je α = 0 ili −→a =−→0 , iz definicije odmah slijedi
|α−→a | = |α||−→a | = 0. (1.1)
Obratno, ako vrijedi (1.1), tada je jedan ili drugi faktor tog izraza jednak 0, tj. |α| = 0 ili|−→a | = 0. Iz prve relacije slijedi α = 0, a iz druge −→a =
−→0 .
U ovom kontekstu, realne brojeve nazivamo skalarima.
¡¡¡µ
−→a¡
¡¡
¡¡µ
2−→a
¡¡ª−12−→a
Propozicija 1.1.5 Za svaki vektor −→a ∈ V 3 vrijedi (−1)−→a = −−→a .
Dokaz. Kako je vektor jednoznacno odreden svojim modulom, smjerom i orijentacijom,usporedimo te velicine za vektore (−1)−→a i −−→a : modul vektora (−1)−→a je | − 1||−→a | = |−→a |,smjer vektora (−1)−→a jednak je smjeru od −→a , a orijentacija je suprotna, jer je −1 < 0. Istovrijedi i za vektor −−→a suprotan vektoru −→a . Prema tome, navedeni vektori su jednaki.
Napomena. Razliku vektora −→a −−→b definiramo kao −→a + (−−→b ).
Napomena. Uocimo da su vektori −→a i−→b = α−→a kolinearni, sto slijedi iz definicije mnozenja
vektora skalarom. Pokazat cemo i obrat: ako su vektori −→a 6= −→0 i
−→b kolinearni, tada postoji
jedinstveni skalar α ∈ R takav da je−→b = α−→a (vidi propoziciju 1.2.1).
Teorem 1.1.6 Ako su vektori −→a ,−→b , −→c po volji izabrani vektori iz V 3, α, β realni brojevi,
tada vrijedi
1. −→a +−→b ∈ V 3
2. (−→a +−→b ) +−→c = −→a + (
−→b +−→c ), asocijativnost
9

3. −→a +−→0 =
−→0 +−→a = −→a ,
−→0 je neutralni element za zbrajanje
4. −→a + (−−→a ) = (−−→a ) +−→a =−→0 , −−→a je suprotni element od −→a za zbrajanje
5. −→a +−→b =
−→b +−→a , komutativnost
6. α−→a ∈ V 3
7. α(β−→a ) = (αβ)−→a , kvaziasocijativnost
8. α(−→a +−→b ) = α−→a + α
−→b , distributivnost u odnosu na zbrajanje vektora
9. (α + β)−→a = α−→a + β−→a , distributivnost u odnosu na zbrajanje skalara
10. 1−→a = −→a .
Uz navedena svojstva zbrajanja i mnozenja skalarom na skupu V 3, kazemo da je V 3 jedanvektorski prostor nad R (realan vektorski prostor). Opcenito, skup na kojemu su definiraneoperacije zbrajanja elemenata i mnozenja elemenata skalarima iz R koje zadovoljavaju svojstvateorema 1.1.6 nazivamo vektorski prostor nad R. Takve apstraktne strukture proucavat ce seu kolegiju Linearna algebra.
Dokaz. Tvrdnje 1. i 6. su posljedice definicije.
2. Neka je −→a = [−−→AB],
−→b = [
−−→BC], −→c = [
−−→CD]. Tada po pravilu trokuta imamo
(−→a +−→b ) +−→c = ([
−−→AB] + [
−−→BC]) + [
−−→CD] = [
−→AC] + [
−−→CD] = [
−−→AD],
−→a + (−→b +−→c ) = [
−−→AB] + ([
−−→BC] + [
−−→CD]) = [
−−→AB] + [
−−→BD] = [
−−→AD].
3. Neka je −→a = [−−→AB],
−→0 = [
−→AA]. Tada je
−→0 +−→a = [
−→AA] + [
−−→AB] = [
−−→AB] = −→a .
Slicno, za drugi dio tvrdnje uzimamo−→0 = [
−−→BB], pa je
−→a +−→0 = [
−−→AB] + [
−−→BB] = [
−−→AB] = −→a .
4. Neka je −→a = [−−→AB], −−→a = [
−−→BA]. Tada je
−→a + (−−→a ) = [−−→AB] + [
−−→BA] = [
−→AA] =
−→0 ,
(−−→a ) +−→a = [−−→BA] + [
−−→AB] = [
−−→BB] =
−→0 .
5. Neka je −→a = [−−→AB],
−→b = [
−−→BC]. Tada je −→a +
−→b = [
−→AC].
S druge strane, neka je D ∈ E3 tocka takva da je−−→AD ∼ −−→
BC. Tada je i−−→AB ∼ −−→
DC, pa je
−→b +−→a = [
−−→BC] + [
−−→AB] = [
−−→AD] + [
−−→DC] = [
−→AC].
7. Ako je α ili β jednako 0 ili −→a =−→0 , tvrdnja je ocita. Stoga, neka su α i β razliciti od 0,−→a 6= −→
0 . Tvrdnju cemo pokazati tako da ispitamo modul, smjer i orijentaciju vektora slijeve i desne strane jednakosti:
(a) Modul: |α(β−→a )| = |α||β−→a | = |α|(|β||−→a |) = (|α||β|)|−→a | = (|αβ|)|−→a |;(b) Smjer: po definiciji, smjer oba vektora jednak je smjeru vektora −→a ;
10

(c) Orijentacija: Postoje cetiri mogucnostii. Ako je α > 0, β > 0, tada je β−→a orijentiran kao −→a , pa je α(β−→a ) orijentiran
kao −→a . S druge strane je αβ > 0, pa je vektor (αβ)−→a orijentiran kao −→a .ii. Ako je α > 0, β < 0, tada su vektori α(β−→a ) i (αβ)−→a orijentirani suprotno od−→a .iii. Ako je α < 0, β > 0, tada su vektori α(β−→a ) i (αβ)−→a orijentirani suprotno od−→a .iv. Ako je α < 0, β < 0, tada su vektori α(β−→a ) i (αβ)−→a orijentirani jednako kao−→a .
8. Ako je α = 0, tvrdnja je ocita. Neka je stoga α 6= 0. Dokazimo tvrdnju u slucaju da−→a i
−→b nemaju isti smjer (nisu kolinearni). Neka je −→a = [
−→OA],
−→b = [
−−→AB]. Tada je
−→a +−→b = [
−−→OB]. Neka je nadalje α−→a = [
−−→OA′]. Kako su vektori −→a i α−→a istog smjera,
to su tocke O, A, A′ na istom pravcu. Odaberimo tocku B′ na pravcu OB tako da sutrokuti 4OAB i 4OA′B′ slicni.
-rO
rA′
-rA
¡¡
¡¡
¡¡
¡¡
¡¡
¡¡µrB′
¡¡
¡¡
¡¡
¡¡µrB
¤¤¤¤¤¤¤¤º
¤¤¤¤¤¤¤¤¤¤¤¤º
Iz slicnosti slijedi da je AB ‖ A′B′ i |A′B′| = |α||AB|, te zakljucujemo [−−→A′B′] = α[
−−→AB] =
α−→b . S druge strane takoder je |OB′| = |α||OB| i tocke O,B,B′ leze na istom pravcu,
pa je [−−→OB′] = α[
−−→OB]. Prema tome, dobili smo
α(−→a +−→b ) = α[
−−→OB],
α−→a + α−→b = [
−−→OA′] + [
−−→A′B′] = [
−−→OB′] = α[
−−→OB].
9. U dokazu ove tvrdnje, opet razmatramo razlicite mogucnosti za predznake od α, β.Primjerice, pokazimo tvrdnju u slucaju α > 0, β < 0, |α| > |β|, te je α + β > 0. Nekaje α−→a = [
−−→AB], β−→a = [
−−→BC]. Kako su ti vektori kolinearni, tocke A, B,C leze na istom
pravcu. Nadalje, jer je α > 0, β < 0, ti su vektori suprotnih orijentacija. Kako je|α| > |β|, to je
|AB| = |α−→a | = |α||−→a | > |β||−→a | = |β−→a | = |BC|,pa tocka C lezi izmedu tocaka A i B.
Stoga je α−→a + β−→a = [−→AC] i vrijedi da se sljedece velicine podudaraju:
(a) moduli vektora: |α−→a + β−→a | = |AC| = |α||−→a | − |β||−→a | = α|−→a | + β|−→a | = (α +β)|−→a | = |α + β||−→a | = |(α + β)−→a |,
(b) smjerovi vektora: α−→a + β−→a i (α + β)−→a ,(c) orijentacije vektora: α−→a + β−→a i (α + β)−→a , jer su jednako orijentirani kao −→a .
10. Vektori 1−→a i −→a ocito imaju isti modul, smjer i orijentaciju.
11

Napomena. Pojam vektora moze se uvesti i drugacije – slijedeci ideju upute za gibanje,primjerice ”Kreni 1 km prema sjeveru”. Takva uputa je smislena bez obzira na kojem mjestu(u kojoj tocki) se nalazimo. Uputu matematicki izrazavamo kao funkciju, tj. pravilo kojimutvrdujemo koja je tocka pridruzena zadanoj tocki.
Napomena. Osvrnimo se jos jednom na dosad uvedene pojmove. Vektor smo definiralipolazeci od nedefiniranih pojmova (tocka, pravac, ravnina) i aksiomatski uvedene euklidskegeometrije. Mozemo krenuti i obratno: polazeci od aksiomatski uvedenog pojma vektora kaoelementa apstraktnog vektorskog prostora i zadanog skupa tocaka, mozemo definirati elementeeuklidske geometrije (pravac, ravninu). Takav pristup definira tzv. afini prostor. Vise o tomena kolegiju Euklidski prostori.
Napomena. U srednjoj skoli vektor se ne uvodi kao klasa ekvivalencije na skupu svihusmjerenih ili orijentiranih duzina. Vektor se definira kao jedna usmjerena (orijentirana)duzina, a zatim se definira kad su vektori jednaki. Ne istice se uvijek ni orijentacija vektora.Vektor je karakteriziran duljinom i smjerom, a pod smjerom se podrazumijeva i pravac odredenvektorom kao i orijentacija vektora (primjerice, u fizici vektor je karakteriziran svojim iznosom(duljinom, modulom) i smjerom (smjer i orijentacija)).
Zadaci
1. Koliko razlicitih (a) orijentiranih duzina, (b) vektoraodreduju (medusobo razliciti) vrhovi kvadrata ABCD? [
a) 12, b) 8]
2. Neka je ABCDEF pravilini sesterokut i O njegovo srediste. Koliko razlicitih vektoraodreduju stranice sesterokuta? Svakom od tih vektora odredite predstavnika s pocetnomtockom O. [
6 vektora;−→OA =
−−→CB =
−−→EF ,
−−→OB =
−−→DC =
−→FA,
−−→OC =
−−→ED =
−−→AB,
−−→AB =
−−→FE =
−−→BC,
−−→AB =
−→AF =
−−→CD,
−−→AB =
−−→BA =
−−→DE
]
3. Na crtezu paralelograma ilustrirajte jednakost
(a) −→a + 12(−→b −−→a ) = 1
2(−→a +−→b )
(b) 12(−→a +
−→b )− 1
2(−→a −−→b ) =−→b
4. U trokutu ABC, tocka K je poloviste stranice BC. Izrazite vektor−−→AK pomocu vektora
~a =−→CA i ~b =
−−→CB.
[ −−→AK = −~a + 1
2~b
]
5. Neka je ABC trokut, A1, B1 i C1 polovista stranica BC, CA i AB redom, a T njegovoteziste.
(a) Izrazite vektore−→TA i
−−→BC pomocu
−−→TB1 i
−−→TC1.
(b) Izrazite vektore−→AC i
−−→A1T pomocu
−→TA i
−→TB.
12

[a)−→TA = 2
−−→TB1 + 2
−−→TC1,
−−→BC = 2
−−→TB1 − 2
−−→TC1;
b)−→AC = −2
−→TA−−→TB,
−−→A1T = 1
2
−→TA.
]
6. Neka je ABCDA′B′C ′D′ kocka, neka je O njeno srediste, a P poloviste brida BB′.Izrazite vektor
−−→OP pomocu vektora
−−→AB,
−−→AD i
−−→AA′.
[ −−→OP = 1
2
−−→AB − 1
2
−−→AD
]
7. Neka je ABCDA′B′C ′D′ kvadar. Pokazite da je suma vektora−−→AC ′,
−−→B′D,
−−→CA′ i
−−→D′B
nulvektor.
8. Neka su P , Q, R redom polovista bridova AB, BC i CA tetraedra OABC. Dokazite daje−→OA +
−−→OB +
−−→OC =
−−→OP +
−−→OQ +
−−→OR.
9. Dana je cetverostrana piramida cija je baza paralelogram ABCD, a vrh tocka V . Akoje S sjeciste dijagonala paralelograma, pokazite da je
−→V A +
−−→V B +
−−→V C +
−−→V D = 4
−→V S.
10. Sportski zrakoplov leti svojom vlastitom brzinom od 150 km/h od sjevera prema jugu.Tada pocne puhati vjetar sjeverozapadnog smjera brzinom 30 km/h. Nacrtajte vektorbrzine zrakoplova (u odnosu na Zemlju) i izracunajte njegov modul.
1.2 Baza vektorskog prostora V 3. Koordinatizacija
Vec smo definirali kolinearne vektore kao vektore istog smjera. Uocili smo i da su vektori −→a iα−→a , α ∈ R kolinearni. Vrijedi i ovakav obrat:
Propozicija 1.2.1 Neka su −→a ,−→b ∈ V 3 kolinearni vektori, −→a 6= −→
0 . Tada postoji jedinstvenskalar λ ∈ R takav da je
−→b = λ−→a .
Dokaz. Ako je−→b =
−→0 , stavimo λ = 0. Ocito je λ = 0 jedini takav skalar.
Ako−→b 6= −→
0 , uocimo skalar|−→b ||−→a | 6= 0 i usporedimo vektore
−→b i
|−→b ||−→a |
−→a . Oni imaju jednak
modul
| |−→b ||−→a | |
−→a || = |−→b ||−→a | |
−→a | = |−→b |,
i jednak smjer, jer je vektor|−→b ||−→a |
−→a po definiciji mnozenja vektora skalarom kolinearan s −→a .
Njihove orijentacije ne moraju biti jednake, vektor|−→b ||−→a |
−→a ima istu orijentaciju kao −→a , dok
vektor−→b ne mora imati. No, izborom predznaka skalara λ = ±|
−→b ||−→a | , postizemo da su vektori
−→b i λ−→a i jednako orijentirani. Iz svega navedenog zakljucujemo da se oni podudaraju
−→b = ±|
−→b ||−→a |
−→a .
13

Pokazimo jos da je skalar λ iz tvrdnje jednoznacno odreden. Pretpostavimo da postoje dvatakva skalara,
−→b = λ−→a ,
−→b = λ′−→a . Tada vrijedi λ−→a = λ′−→a , odnosno (λ−λ′)−→a =
−→0 , iz cega
slijedi, zbog −→a 6= −→0 , λ− λ′ = 0.
Sad smo kolinearnost vektora (geometrijski pojam) uspjeli realizirati algebarski. Malu smetnjuu prethodnoj propoziciji cini nesimetricnost pretpostavke −→a 6= −→
0 . No, to mozemo rijesiti nasljedeci nacin. Uvjet iz prethodne propozicije mozemo zapisati i kao
λ−→a −−→b =−→0 . (1.2)
Ako vektorima −→a ,−→b zamijenimo uloge, tada imamo
−−→a + λ−→b =
−→0 . (1.3)
Ovo vodi na promatranje opcenitije jednadzbe za zadane vektore −→a ,−→b
α−→a + β−→b =
−→0 . (1.4)
Trazimo skalare α, β za koje je ta jednadzba ispunjena. Jedna mogucnost kada je ta jednadzbasvakako ispunjena je α = β = 0. Takav izbor skalara nazivamo trivijalnim. Iz jednakosti (1.2),(1.3) slijedi da je u slucaju kad su vektori −→a ,
−→b kolinearni jednakost ispunjena i za α = λ,
β = −1, odnosno α = −1, β = λ kod jednakosti (1.3). Dakle, u slucaju kad su vektori −→a ,−→b
kolinearni, jednakost (1.4) je ispunjena i za netrivijalni izbor skalara.
Obratno, ako je primjerice α 6= 0, tada je moguce pisati
−→a = −β
α
−→b ,
iz cega slijedi da su vektori −→a ,−→b kolinearni. Analogno vrijedi u situaciji ako je β 6= 0. Time
smo dokazali sljedecu propoziciju:
Propozicija 1.2.2 Vektori −→a ,−→b su kolinearni ako i samo ako postoji netrivijalan izbor
skalara α, β ∈ R tako da vrijedi α−→a + β−→b =
−→0 .
Definicija 1.2.1 Izraz oblika α−→a + β−→a zove se linearna kombinacija vektora −→a ,−→b s
koeficijentima α, β. Analogno i za k vektora, izraz oblika α1−→a1 + . . . + αk
−→ak zove se linearnakombinacija vektora −→a1, . . . ,
−→ak s koeficijentima α1, . . . , αk.
Za vektore −→a ,−→b kazemo da su nekolinearni ako nisu kolinearni.
Iz prethodnih propozicija slijedi:
Propozicija 1.2.3 Vektori −→a ,−→b su nekolinearni ako i samo ako iz jednakosti α−→a +β
−→b =
−→0
slijedi α = β = 0.
Drugacije receno:
Propozicija 1.2.4 Vektori −→a ,−→b su nekolinearni ako i samo ako je jednakost α−→a +β
−→b =
−→0
ispunjena samo za trivijalan izbor skalara α, β ∈ R.
14

Ili:
Propozicija 1.2.5 Vektori −→a ,−→b su nekolinearni ako i samo ako jednadzba α−→a + β
−→b =
−→0
ima jedinstveno rjesenje α = β = 0.
Definicija 1.2.2 Kazemo da je vektor −→a = [−−→AB] paralelan s ravninom π ⊂ E3, −→a ‖ π, ako
je pravac AB paralelan sa π (pravac je paralelan s ravninom ako je paralelan s nekim pravcemu ravnini). Za vektore koji su paralelni s istom ravninom, kazemo da su komplanarni.
Definicija paralelnosti vektora ocito ne ovisi o izboru predstavnika.
Propozicija 1.2.6 Neka su −→a ,−→b ∈ V 3, α, β ∈ R i neka je −→c = α−→a + β
−→b . Tada su vektori
−→a ,−→b ,−→c komplanarni.
Dokaz. Po definiciji zbrajanja vektora (pravilom trokuta ili paralelograma) slijedi da je zbrojvektora paralelan s ravninom odredenom zadanim vektorima.
Zanimljiv je obrat prethodne propozicije:
Propozicija 1.2.7 Neka su −→a ,−→b ∈ V 3 nekolinearni vektori, te neka je −→c ∈ V 3 s njima
komplanaran vektor. Tada postoje jedinstveni skalari α, β ∈ R takvi da je
−→c = α−→a + β−→b .
Dokaz. Neka je O ∈ E3 bilo koja tocka, −→a = [−→OA],
−→b = [
−−→OB], −→c = [
−−→OC]. Kako su −→a ,
−→b ,−→c
komplanarni, tocke O,A, B, C leze u istoj ravnini, a jer −→a ,−→b nisu kolinearni, tocke O,A, B
ne leze na istom pravcu.
--O©©©©©©©©©©©©©©*
A′A¢¢¢¢¢¢¢
¢¢
B
B′
¢¢¢¢¢¢¢C-
Prema 5. Euklidovom aksiomu postoji jedinstven pravac paralelan pravcu OB koji prolazitockom C. Oznacimo s A′ presjek tog pravca s pravcem OA. Analogno, postoji jedinstvenpravac paralelan pravcu OA koji prolazi tockom C. Oznacimo s B′ presjek tog pravca spravcem OB. Ocito je cetverokut OA′CB′ paralelogram. Iz definicije zbrajanja vektora popravilu paralelograma slijedi
[−−→OC] = [
−−→OA′] + [
−−→OB′].
Vektor [−−→OA′] je kolinearan s vektorom [
−→OA], pa primjenom propozicije 1.2.1 zakljucujemo da
postoji α ∈ R takav da je [−−→OA′] = α[
−→OA]. Analogno postoji β ∈ R takav da je [
−−→OB′] = β[
−−→OB].
Time smo dobili −→c = α−→a + β−→b .
Dokazimo jos jedinstvenost prikaza.
15

Neka je takoder −→c = α′−→a + β′−→b . Tada slijedi (α − α′)−→a + (β − β′)
−→b =
−→0 . Kako su −→a ,
−→b
nekolinearni vektori, to je moguce jedino ako je α′ = α, β′ = β (propozicija 1.2.3).
Osvrnimo se na trenutak na V 2. Uocimo da u V 2 uvijek mozemo naci dva nekolinearnavektora (posljedica aksioma, u ravnini postoje tri nekolinearne tocke). Prethodna propozicija,adaptirana za V 2 glasi:
Propozicija 1.2.8 Neka su −→a ,−→b ∈ V 2 nekolinearni vektori, te neka je −→c ∈ V 2 po volji
odabran vektor. Tada postoje jedinstveni skalari α, β ∈ R takvi da je
−→c = α−→a + β−→b .
Uocimo dva momenta: postojanje (egzistencija) rastava i jedinstvenost rastava vektora −→c .Ako bismo odabrali tri vektora −→a ,
−→b ,−→c ∈ V 2 i vektor
−→d kojeg zelimo napisati kao njihovu
linearnu kombinaciju, tada bi prikaz mogao postojati, ali sigurno ne bi bio jedinstven (ispitajtena primjeru). Slicno, samo s jednim vektorom ne bismo mogli prikazati sve druge vektore izV 2, prikaz ne bi postojao. Dakle, skup od dva nekolinearna vektora je najmanji moguci kojizadovoljava oba svojstva. U tom smislu definiramo:
Definicija 1.2.3 Baza vektorskog prostora V 2 je skup {−→a ,−→b } od dva nekolinearna vektora.
Uocimo da postoje mnoge razlicite baze, ali svima je zajednicko da sadrze tocno dva nekoli-nearna vektora. Kazemo da je V 2 dvodimenzionalan vektorski prostor. Pisemo dimV 2 = 2.
U V 3 dva vektora nisu dovoljna za prikaz po volji odabranog vektora. Uocimo da u V 3 uvijekmozemo naci tri nekomplanarna vektora.
Propozicija 1.2.9 Neka su −→a ,−→b , −→c ∈ V 3 tri nekomplanarna vektora. Ako je
−→d ∈ V 3 bilo
koji vektor, onda postoje jedinstveni skalari α, β, γ ∈ R takvi da je
−→d = α−→a + β
−→b + γ−→c .
Dokaz. Neka je O ∈ E3 bilo koja tocka, −→a = [−→OA],
−→b = [
−−→OB], −→c = [
−−→OC],
−→d = [
−−→OD].
Kako −→a ,−→b , −→c nisu komplanarni, tocke O, A,B,C ne leze u istoj ravnini. Uocimo i da nikoja
dva medu vektorima −→a ,−→b ,−→c nisu kolinearna.
Uocimo sada da postoji jedinstven pravac koji prolazi tockom D i paralelan je pravcu OC.Taj pravac presjeca ravninu odredenu tockama O, A, B u tocki D′. Nadalje, pravac kroz tockuD paralelan pravcu OD′ presjeca pravac OC u tocki koju oznacujemo kao C ′.
Ocito je[−−→OD] = [
−−→OD′] + [
−−→OC ′].
Vektori −→a ,−→b , [
−−→OD′] su komplanarni, te po propoziciji 1.2.7 postoje skalari α, β ∈ R takvi da
je[−−→OD′] = α−→a + β
−→b .
Nadalje, vektor [−−→OC ′] je kolinearan s vektorom [
−−→OC], pa po propoziciji 1.2.1 postoji skalar
γ ∈ R takav da je[−−→OC ′] = γ−→c .
16

Prethodna tri zakljucka, daju tvrdnju.
Dokazimo jos jedinstvenost prikaza. Ako vrijedi i−→d = α′−→a + β′
−→b + γ′−→c i kad bi bilo γ 6= γ′,
slijedilo bi−→c =
1γ′ − γ
((α− α′)−→a + (β − β′)
−→b
),
sto bi znacilo da su −→a ,−→b ,−→c ∈ V 3 komplanarni, suprotno pretpostavci. Analogno se iskljucuju
mogucnosti α 6= α′, β 6= β′.
Sada definiramo:
Definicija 1.2.4 Bilo koji skup {−→a ,−→b ,−→c } od tri nekomplanarna vektora nazivamo bazom
od V 3. Kazemo da je V 3 trodimenzionalan vektorski prostor.
Pogledajmo jos jednom propoziciju 1.2.7: ako su −→a ,−→b nekolinearni vektori, te −→c s njima
komplanaran, tada postoje jedinstveni skalari α, β ∈ R takvi da je −→c = α−→a + β−→b . Jednakost
iz te propozicije mozemo zapisati i na sljedeci nacin
α−→a + β−→b − 1−→c =
−→0 .
Dakle, u ovom je slucaju jednadzba
α−→a + β−→b + γ−→c =
−→0
ispunjena na netrivijalan nacin. Slicnim razmatranjem kao i u slucaju dva nekolinearna vek-tora, pokazat cemo:
Propozicija 1.2.10 Vektori −→a ,−→b ,−→c ∈ V 3 su nekomplanarni ako i samo ako jednakost
α−→a + β−→b + γ−→c =
−→0 (1.5)
povlaci α = β = γ = 0.
Dokaz. Pretpostavimo da su vektori −→a ,−→b ,−→c nekomplanarni. Dakle, oni cine bazu za
V 3. Tada se svaki vektor, pa i−→0 , moze na jedinstveni nacin prikazati kao njihova linearna
kombinacija. Kako je za−→0 svakako jedan prikaz
0−→a + 0−→b + 0−→c =
−→0 ,
17

jedinstvenost prikaza povlaci da je to upravo trazeni prikaz, dakle, α = β = γ = 0.
Obratno, neka je ispunjen uvjet propozicije, tj. neka iz jednadzbe (1.5) slijedi α = β = γ = 0.Dokazimo da su vektori −→a ,
−→b , −→c nekomplanarni.
Uocimo najprije da je svaki od vektora −→a ,−→b ,−→c razlicit od nulvektora. Naime, kad bi neki
bio nulvektor, npr. −→a =−→0 , tada bismo mogli uzeti bilo koji skalar α razlicit od 0 i pritom
bi jednadzba (1.5) i dalje bila ispunjena, ali uvjet da iz nje slijedi α = β = γ = 0 ne bi bioispunjen, sto je kontradikcija s pretpostavkom.
Slicno, nikoja dva vektora nisu kolinearna. Naime, kad bi −→a ,−→b bili kolinearni, tada bi
postojao λ 6= 0, takav da je−→b = λ−→a , pa bi uz γ = 0 mogli naci netrivijalne skalare α, β tako
da je jednadzba (1.5) ispunjena, ali uvjet iz propozicije opet ne.
Pretpostavimo jos na kraju da je −→c 6= −→0 komplanaran s −→a ,
−→b . Tada bi postojali skalari
α, β ∈ R koji nisu istovremeno 0, te bismo mogli pisati
α−→a + β−→b + (−1)−→c =
−→0 ,
sto je opet kontradikcija s pretpostavkom.
Napomena. U kolegiju Linearna algebra definirat ce se: Skup vektora {−→a1, . . . ,−→ak} je line-
arno nezavisan ako α1−→a1 + . . . + αk
−→ak =−→0 povlaci α1 = . . . = αk = 0. U suprotnom se
kaze da je skup linearno zavisan (dakle, vrijedi prva jednadzba i postoje netrivijalni skalariza koje je ispunjena). Specijalizacijom te definicije za k = 2 dobivamo da je skup vektora uV 2 linearno nezavisan ako i samo ako su vektori nekolinearni, a za k = 3 skup vektora u V 3
je linearno nezavisan ako i samo ako su vektori nekomplanarni. U V 2 skup od bilo koja trivektora je linearno zavisan, a u V 3 skup od bilo koja cetiri vektora je linearno zavisan.
Koordinatizacija
Neka je u V 3 zadana baza {−→a1,−→a2,
−→a3} i neka je −→a ∈ V 3 neki vektor. Tada po propoziciji 1.2.8postoje jedinstveni skalari α1, α2, α3 ∈ R takvi da je
−→a = α1−→a1 + α2
−→a2 + α3−→a3 =
3∑
i=1
αi−→ai .
Sljedece preslikavanje nazivamo koordinatizacija prostora V 3
k : V 3 → R3, k(−→a ) = (α1, α2, α3),
gdje je R3 = R× R× R = {(x, y, z) : x, y, z ∈ R} skup svih uredenih trojki realnih brojeva.
Ocito vrijedi:
Propozicija 1.2.11 Preslikavanje k je bijekcija.
Ovim je postupkom vektor predstavljen (na jednoznacan nacin) kao uredena trojka realnihbrojeva. Skalare α1, α2, α3 nazivamo koordinatama vektora −→a u odnosu na zadanu bazu,a uredenu trojku (α1, α2, α3) koordinatnim prikazom vektora −→a . Uocimo da koordinateodnosno koordinatni prikaz vektora ovisi o zadanoj bazi! Pisemo −→a = (α1, α2, α3) kad znamos obzirom na koju bazu smo koordinatizirali V 3.
18

Slicno bismo koordinatizirali V 1 i V 2. Za V 2 definiramo
k : V 2 → R2, k(−→a ) = (α1, α2),
gdje je −→a = α1−→a1 + α2
−→a2 za bazu {−→a1,−→a2}, a R2 je skup svih uredenih parova realnih brojeva
R2 = R× R = {(x, y) : x, y ∈ R}.Za V 1 definiramo
k : V 1 → R, k(−→a ) = α1,
gdje je −→a = α1−→a1, a {−→a1 6= −→
0 } baza od V 1.
Promotrimo kako se zbrajanje vektora i mnozenje vektora skalarom realiziraju u njihovimkoordinatnim prikazima. Neka je u V 3 zadana baza {−→a1,
−→a2,−→a3} i neka su −→a ,
−→b ∈ V 3, λ ∈ R.
Tada je
−→a +−→b = α1
−→a1 + α2−→a2 + α3
−→a3 + β1−→a1 + β2
−→a2 + β3−→a3
= (α1 + β1)−→a1 + (α2 + β2)−→a2 + (α3 + β3)−→a3,
te je koordinatni prikaz vektora −→a +−→b jednak
(α1 + β1, α2 + β2, α3 + β3).
Slicno λ−→a = λα1−→a1 + λα2
−→a2 + λα3−→a3, te je koordinatni prikaz vektora λ−→a jednak
(λα1, λα2, λα3).
Specijalno −−→a = (−α1,−α2,−α3).
Kada su vektori kolinearni? Po propoziciji 1.2.1 za kolinearne vektore −→a 6= −→0 ,−→b postoji
λ ∈ R takav da je−→b = λ−→a iz cega slijedi da za koordinate vektora dobivamo
βi = λαi, i = 1, 2, 3.
Dakle, vektori su kolinearni ako za njihove koordinate vrijedi β1 : α1 = β2 : α2 = β3 : α3 ilidrugacije zapisano α1 : α2 : α3 = β1 : β2 : β3.
Napomena. Ako u R3 definiramo zbrajanje uredenih trojki i mnozenje uredenih trojkiskalarom formulama
(α1, α2, α3) + (β1, β2, β3) = (α1 + β1, α2 + β2, α3 + β3)
λ(α1, α2, α3) = (λα1, λα2, λα3),
tada R3 ispunjava uvjete teorema 1.1.6, te postaje vektorski prostor nad R. Slicno vrijedi zaR2 i R.
Napomena. Koordinate vektora vrlo cesto pisemo i u stupce
−→a =
a1
a2
a3
.
Zapis na desnoj strani jednakosti predstavlja jednostupcanu matricu s tri retka. Skup svihtakvih matrica oznacava se s M31(R). Koordinatizaciju vektora tada definiramo kao preslika-vanje k : V 3 → M31(R). Vise o tome na Linearnoj algebri.
19

Zadaci
1. Neka su −→a ,−→b , −→c radijus–vektori tocaka A, B, C. Odredite radijus–vektor tocke D
tako da ABCD bude paralelogram. Odredite radijus–vektor sjecista dijagonala togparalelograma. [
~d = ~a−~b + ~c, ~s = 12~a + 1
2~c]
2. Dane su cetiri tocke A, B, C, D. Neka su P i Q polovista duzina AB i CD redom.Dokazite da je
−−→AD +
−−→BC =
−→AC +
−−→BD = 2
−−→PQ.
3. Dokazite da je cetverokut paralelogram ako i samo ako mu se dijagonale raspolavljaju.
4. Pomocu vektora dokazite tvrdnju: polovista stranica bilo kojeg cetverokuta tvore paralel-ogram.
5. Neka je ABC trokut i T njegovo teziste. Neka su A1, B1, C1 redom tocke simetricnevrhovima A, B, C u odnosu na teziste, tj. takve da duzine AA1, BB1 i CC1 imajuzajednicko poloviste T . Dokazite da je teziste trokuta A1B1C1 tocka T .
6. Dokazite da trokuti 4ABC i 4PQR imaju zajednicko teziste ako i samo ako je−→AP +−−→
BQ +−→CR = ~0. (Uputa: prikazite vektor odreden njihovim tezistima pomocu vektora−→
AP ,−−→BQ i
−→CR.)
7. Tetraedar ima tri para nasuprotnih bridova. Dokazite da duzine koje spajaju polovistanasuprotnih bridova tetraedra prolaze istom tockom.
8. Dijagonale cetverokuta ABCD se sijeku u tocki S. Dokazite: ako je−→SA +
−→SB +
−→SC +−→
SD =−→0 , onda je ABCD paralelogram.
9. Neka je ABCV pravilna uspravna trostrana piramida s vrhom V . Neka su A1, B1 iC1 tocke redom na bridovima AV , BV i CV , takve da je |V A1| : |A1A| = 2 : 1,|V B1| : |B1B| = 2 : 1 i |V C1| : |C1C| = 2 : 1.
(a) Dokazite da je−−→AB1 +
−−→BC1 +
−−→CA1 =
−−→AA1 +
−−→BB1 +
−−→CC1.
(b) Ako je S srediste trokuta ABC, da li su vektori−−→AB1,
−−→BC1,
−−→CA1 i
−→V S linearno
zavisni, linearno nezavisni, ili je to ovisno o obliku piramide?
[b) 4 vektora u V 3 su uvijek linearno zavisna; vrijedi
−−→AB1 +
−−→BC1 +
−−→CA1 = −−→V S
]
10. Dokazite sljedece tvrdnje:
(a) Ako je medu vektorima barem jedan nulvektor, oni su linearno zavisni.
(b) Bilo koja dva kolinearna vektora su linearno zavisna.
(c) Svaki vektor prostora V 2 moze se na jedinstven nacin prikazati kao linearna kom-binacija vektora baze tog prostora.
(d) Svaka tri vektora prostora V 2 su linearno zavisna.
(e) Svaki vektor prostora V 3 moze se na jedinstven nacin prikazati kao linearna kom-binacija vektora baze tog prostora.
(f) Svaka cetiri vektora prostora V 3 su linearno zavisna.
20

(g) Svaki podskup linearno nezavisnog skupa vektora je linearno nezavisan.
11. Sto je baza vektorskog prostora V 1? Kolika je njegova dimenzija?
12. Neka je OABCDE pravilan sesterokut. Odredite koordinate vektora−−→AB,
−−→BC,
−−→OC,−−→
OD,−−→OE u bazi {−→OA,
−−→OB}.
[ −−→AB = (−1, 1),
−−→BC = (−2, 1),
−−→OC = (−2, 2),
−−→OD = (−3, 2),
−−→OE = (−2, 1)
]
13. Ako je ~a = (3,−4, 1), ~b = (0, 2,−3) i ~c = (1,−2, 3) izracunajte 3~a + 2~b− 2~c.[(7,−4, 9)
]
14. Prikazite, ako je moguce, vektor (3, 4, 5) kao linearnu kombinaciju vektora (1, 1, 1) i(1, 2, 3). [
2 · (1, 1, 1) + (1, 2, 3)]
15. Da li je {(1, 1, 1), (1, 1, 0), (0, 0, 1)} baza od V 3?
[Ne, jer vektori nisu linearno nezavisni; (1, 1, 1) = (1, 1, 0) + (0, 0, 1)
]
16. Cine li vektori
(a) ~a = (3,−4, 1), ~b = (0, 2,−3) i ~c = (1,−2, 3)
(b) ~a = (1, 2, 3), ~b = (1, 0,−2) i ~c = (5,−4, 3)
bazu prostora V 3 ? [a) Da; b) Da.
]
17. Neka je {−→i ,−→j ,−→k } baza u V 3. Da li su sljedeci vektori linearno nezavisni?
(a) ~a = 2−→i +
−→j , ~b = −−→j , ~c = 2.3
−→j − 1.5
−→k , ~d = π
−→i − 2.32
−→k
(b) ~a = 2−→i +
−→j −−→k , ~b = 4
−→i + 2
−→j − 2
−→k
(c) ~a =−→i + 5
−→j , ~b =
−→i +
−→j +
−→k , ~c =
−→j
(d) ~a =~i−~j, ~b =~i + 2~j − 5~k, ~c = −~i + 4~j − 5~k
(e) ~a =~i +~j − ~k, ~b =~i−~j + ~k[
a) Ne; b) Ne; c) Da; d) Ne; e) Da]
18. Prikazite, ako je moguce, vektor ~x kao linearnu kombinaciju vektora ~a i ~b, odnosno ~a, ~bi ~c.
(a) ~x = (2,−3), ~a = (1, 2), ~b = (1,−1)
(b) ~x = (−2, 10), ~a = (5, 1), ~b = (2, 3)
(c) ~x = (1,−2), ~a = (−2, 4), ~b = (2, 3)
(d) ~x = (2, 1, 3), ~a = (1, 1, 1), ~b = (2, 3, 4)
(e) ~x = (2,−3, 4), ~a = (1, 1, 1), ~b = (1, 1, 0), ~c = (1, 0, 0)
21

(f) ~x = (1, 2,−5), ~a = (1,−1,−1), ~b = (2, 1, 4), ~c = (1, 1, 3)
(g) ~x = (0, 1,−2), ~a = (1,−1,−1), ~b = (2, 1, 4), ~c = (1, 1, 1)
(h) ~x = (0, 1,−2), ~a = (1,−1,−1), ~b = (2, 4, 4), ~c = (1, 1, 1)
[a) ~x = −1
3~a + 73~b, b) ~x = −2~a + 4~b, c) ~x = −1
2~a, d) nije moguce,
e) ~x = 4~a− 7~b + 5~c, f) nije moguce, g) ~x = −~b + 2~c, h) nije moguce.]
19. Odredite t ∈ R tako da vektor ~w bude linearna kombinacija vektora ~u i ~v, ako je:
(a) ~u = (t− 1, 0, 1), ~v = (1,−2, t), ~w = (−4,−4, 3);
(b) ~u = (t− 2, 1,−1), ~v = (1, t, 2), ~w = (−1, 1, 1).
[a) Za t = 3 vrijedi ~w = −3~u + 2~v, a za t = −1
2 je ~w = 4~u + 2~v;
b) Za t = 0 vrijedi ~w = ~u + ~v, a za t = 5 je ~w = −37~u + 2
7~v.]
20. U ovisnosti o realnom parametru m ispitajte linearnu zavisnost i nezavisnost vektora(1, 0, 1), (m,m, 0) i (m− 1, 1,−1).
[Za m = 0 i m = 1 vektori su linearno zavisni, inace su lin. nezavisni.
]
21. Dan je trapez ABCD s osnovicama AB i CD. Dokazite da su vektori−→AC +
−−→DB i
−−→AB
kolinearni.
22. Dokazite da sve tri tezisnice trokuta prolaze istom tockom. U kojem omjeru teziste dijelitezisnice?
23. Dan je trokut ABC. Neka je M tocka na stranici BC, takva da je |BM | : |MC| = 3 : 1i neka je N tocka na duzini AM takva da je |AN | : |NM | = 2 : 3. Neka je P tocka ukojoj pravac BN sijece stranicu AC. Odredite |AP | : |PC|.
[|AP | : |PC| = 1 : 2
]
24. Neka je ABC trokut. Tocke M i N su zadane sa−−→AM = 2
3
−−→AB i
−−→MN = 1
2
−−→MC, te T kao
sjeciste pravaca BN i AC. Odredite u kojem omjeru tocka T dijeli duzinu AC.
[|AT | : |TC| = 3 : 1
]
25. U paralelogramu ABCD tocka P je poloviste stranice CD, a tocka R sjeciste AP idijagonale BD. U kojim omjerima tocka R dijeli duzine AP i BD?
[|AR| : |RP | = 2 : 1, |BR| : |RD| = 2 : 1
]
26. Zadan je trokut ABC i tocke M i N na stranicama AB i BC redom takve da je−−→AM =
23
−−→AB i
−−→BN =
−−→NC. Neka je T sjeciste pravaca AN i CM . Odredite omjer u kojem tocka
T dijeli duzinu CM .
22

[|CT | : |TM | = 3 : 2
]
27. Zadan je paralelogram ABCD i tocka T na stranici AB tako da je−→AT = 1
n
−−→AB. Neka je
S presjek duzina AC i TD. U kojem omjeru tocka S dijeli duzinu AC?
[|AS| : |SC| = 1 : n
]
28. Neka je T po volji odabrana tocka unutar trokuta ABC. Dokazite da postoje skalarit1, t2, t3 takvi da vrijedi 0 < ti < 1, i = 1, 2, 3, t1 + t2 + t3 = 1 i
−→OT = t1
−→OA + t2
−−→OB +
t3−−→OC.
1.3 Skalarni produkt. Ortonormirana baza
Da bismo definirali skalarni produkt dvaju vektora, prvo trebamo odrediti kako mjerimo kutmedu vektorima. Pod mjerom kuta dvaju ne-nulvektora podrazumijevamo mjeru (velicinu)manjeg od dvaju kuteva polupravaca koji su odredeni tim vektorima. Prema tome, (radijanska)mjera kuta dvaju vektora iznosi izmedu 0 i π, pisemo ∠(−→a ,
−→b ) ∈ [0, π].
-¡¡
¡¡
¡¡
¡¡µ
−→a
−→b
ϕ-@
@@
@@
@@@I
ϕ −→a
−→b
Ako je jedan od vektora −→a ,−→b nulvektor, tada mjeru kuta izmedu njih ne definiramo.
Ocito je mjera kuta dvaju vektora dobro definiran pojam, tj. ne ovisi o izboru predstavnikavektora (kutovi s paralelnim kracima!).
Nadalje vrijedi i ∠(−→a ,−→b ) = ∠(
−→b ,−→a ).
Ako je ∠(−→a ,−→b ) = π
2 , tada kazemo da su vektori −→a ,−→b okomiti (ortogonalni) i pisemo −→a ⊥ −→
b .
Uocimo da su vektori −→a ,−→b kolinearni ako i samo ako je ∠(−→a ,
−→b ) = 0 ili ∠(−→a ,
−→b ) = π. U
prvom su slucaju vektori jednako, a u drugom suprotno orijentirani.
Definicija 1.3.1 Skalarno mnozenje vektora je operacija · : V 3 × V 3 → R koja vektorima−→a ,
−→b razlicim od nulvektora pridruzuje skalar
−→a · −→b = |−→a ||−→b | cos∠(−→a ,−→b ).
Ako je neki od vektora −→a ,−→b nulvektor, tada definiramo −→a · −→b = 0.
Vrijednost −→a · −→b ∈ R nazivamo skalarnim umnoskom ili skalarnim produktom vektora−→a i
−→b .
23

Pomocu skalarnog produkta mozemo karakterizirati okomitost vektora:
Propozicija 1.3.1 Neka su −→a 6= −→0 ,
−→b 6= −→
0 ∈ V 3. Vektori −→a ,−→b su okomiti ako i samo
ako je −→a · −→b = 0.
Dokaz. Kako su −→a 6= −→0 ,−→b 6= −→
0 , ocito je
−→a · −→b = |−→a ||−→b | cos∠(−→a ,−→b ) = 0
ako i samo ako je cos∠(−→a ,−→b ) = 0, sto znaci ∠(−→a ,
−→b ) = π
2 .
Pomnozimo li skalarno vektor −→a sa samim sobom, dobivamo skalarni kvadrat vektora −→a ,pisemo −→a · −→a = −→a 2.
Skalarno mnozenje ima sljedeca svojstva:
Teorem 1.3.2 Za sve −→a ,−→b ∈ V 3 i λ ∈ R vrijedi
1. −→a 2 ≥ 0,
2. −→a 2 = 0 ako i samo ako je −→a =−→0 ,
3. −→a · −→b =−→b · −→a , komutativnost
4. (λ−→a ) · −→b = λ(−→a · −→b ), kvaziasocijativnost
5. (−→a +−→b ) · −→c = −→a · −→c +
−→b · −→c , distributivnost prema zbrajanju.
Prva dva svojstva skalarnog produkta nazivaju se pozitivna definitnost.
Dokaz.
1. −→a 2 = |−→a ||−→a | cos∠(−→a ,−→a ) = |−→a |2 ≥ 0.
2. −→a 2 = 0 ako i samo ako je |−→a | = 0, dakle, ako i samo ako je −→a =−→0 .
3. −→a · −→b = |−→a ||−→b | cos∠(−→a ,−→b ) = |−→b ||−→a | cos∠(
−→b ,−→a ) =
−→b · −→a .
4. Ako je λ = 0 ili −→a =−→0 ili
−→b =
−→0 , tvrdnja je ocita.
Uzmimo zato λ 6= 0, −→a 6= −→0 ,−→b 6= −→
0 . Ako je λ > 0, tada je |λ−→a | = λ|−→a | i ∠(λ−→a ,−→b ) =
∠(−→a ,−→b ), pa je
(λ−→a ) · −→b = |λ−→a ||−→b | cos∠(λ−→a ,−→b )
= λ|−→a ||−→b | cos∠(−→a ,−→b ) = λ(−→a · −→b ).
Ako je λ < 0, tada je |λ−→a | = −λ|−→a | i ∠(λ−→a ,−→b ) = π − ∠(−→a ,
−→b ), pa je
(λ−→a ) · −→b = |λ−→a ||−→b | cos∠(λ−→a ,−→b )
= −λ|−→a ||−→b |(− cos∠(−→a ,−→b )) = λ(−→a · −→b ).
24

Za dokaz tvrdnje 5. treba nam sljedeca lema:
Lema 1.3.3 Za sve −→a ,−→b ∈ V 3 i λ ∈ R vrijedi
(a) (−→a +−→b )2 = −→a 2 + 2−→a · −→b +
−→b 2,
(b) (−→a −−→b )2 = −→a 2 − 2−→a · −→b +−→b 2.
Dokaz. (a) Uzmimo da −→a i−→b nisu kolinearni. Neka je −→a = [
−−→AB],
−→b = [
−−→BC], tada je
−→c = −→a +−→b = [
−→AC].
-¡¡
¡¡
¡¡
¡¡µ
©©©©©©©©©©©©©©©*
A B
C
ϕ π − ϕ
Primjenom kosinusovog poucka na trokut 4ABC dobivamo
(−→a +−→b )2 = −→c 2 = |−→c |2 = |−→a |2 + |−→b |2 − 2|−→a ||−→b | cosϕ
= |−→a |2 + |−→b |2 + 2|−→a ||−→b | cos(π − ϕ)
= |−→a |2 + |−→b |2 + 2|−→a ||−→b | cos∠(−→a ,−→b ) = −→a 2 +
−→b 2 + 2−→a · −→b .
Ako su −→a i−→b kolinearni vektori iste orijentacije, −→a = [
−−→AB],
−→b = [
−−→BC], −→a +
−→b = [
−→AC],
tada je
(−→a +−→b )2 = −→c 2 = |−→c |2 = (|−→a |+ |−→b |)2
= |−→a |2 + |−→b |2 + 2|−→a ||−→b | cos 0 = −→a 2 +−→b 2 + 2−→a · −→b .
Slicno se pokazuje ako su −→a i−→b kolinearni vektori suprotne orijentacije.
(b) Koristimo (~a−~b)2 = (~a + (−~b))2, te dalje tvrdnju (a).
Dokaz. Nastavak dokaza teorema 1.3.2, tvrdnja 5:
4(−→a +−→b ) · −→c = ((−→a +
−→b ) + 2−→c )2 − (−→a +
−→b )2 − 4−→c 2
= ((−→a +−→b ) + 2−→c )2 + (−→a −−→b )2 − 2−→a 2 − 2
−→b 2 − 4−→c 2
= ((−→a +−→c ) + (−→b +−→c ))2 + ((−→a +−→c )− (
−→b +−→c ))2 − 2−→a 2 − 2
−→b 2 − 4−→c 2
= 2(−→a +−→c )2 + 2(−→b +−→c )2 − 2−→a 2 − 2
−→b 2 − 4−→c 2 = 4−→a · −→c + 4
−→b · −→c .
Iz tvrdnji prethodnog teorema odmah slijedi i:
Korolar 1.3.4 Za sve −→a ,−→b ∈ V 3 i λ ∈ R vrijedi
4.’ −→a · (λ−→b ) = λ(−→a · −→b ),
25

5.’ −→a · (−→b +−→c ) = −→a · −→b +−→a · −→c .
Dokaz. Iz teorema 1.3.2 slijedi
−→a · (λ−→b ) = (λ−→b ) · −→a = λ(
−→b · −→a ) = λ(−→a · −→b ).
Analogno se dokazuje tvrdnja 5’.
Ako u nekom vektorskom prostoru nad R definiramo mnozenje vektora s vrijednostima u Rkoje zadovoljava svojstva 1. do 5. teorema 1.3.2, tada se taj vektorski prostor naziva unitarniprostor. Prema tome, V 3 je jedan unitarni prostor.
Definicija 1.3.2 Neka je {−→i ,−→j ,−→k } baza vektorskog prostora V 3 sa svojstvom da su vektori
baze jedinicni i medusobno okomiti (ortogonalni) tj. neka vrijedi
|−→i | = |−→j | = |−→k | = 1,−→i · −→j = 0,
−→j · −→k = 0,
−→i · −→k = 0.
Takvu bazu nazivamo ortonormiranom.
Navedimo jos jednom: vektor −→a za koji je |−→a | = 1 nazivamo jedinicnim ili normiranimvektorom.
Koordinate vektora u odnosu na ortonormiranu bazu nazivamo ortogonalnim ili pravokut-nim koordinatama.
Izvedimo sada formulu za skalarni produkt vektora koji su zadani svojim koordinatnim prikaz-ima u ortonormiranoj bazi.
Propozicija 1.3.5 Neka je {−→i ,−→j ,−→k } ortonormirana baza za V 3, a koordinatni prikazi vek-
tora −→a ,−→b su −→a = (α1, α2, α3),
−→b = (β1, β2, β3). Tada je
−→a · −→b = α1β1 + α2β2 + α3β3 =3∑
i=1
αiβi.
Dokaz. Iz tablice mnozenja
· −→i
−→j
−→k
−→i 1 0 0−→j 0 1 0−→k 0 0 1
i svojstava skalarnog mnozenja slijedi
−→a · −→b = (α1−→i + α2
−→j + α3
−→k ) · (β1
−→i + β2
−→j + β3
−→k ) = α1β1 + α2β2 + α3β3.
26

Sljedeci korolari vrijede za vektore −→a = (α1, α2, α3),−→b = (β1, β2, β3) iz V 3 zadane pravokut-
nim koordinatama.
Korolar 1.3.6 Vektori −→a 6= −→0 i
−→b 6= −→
0 su okomiti ako i samo ako je
α1β1 + α2β2 + α3β3 = 0.
Korolar 1.3.7 Modul vektora jednak je |−→a |2 = α21 + α2
2 + α23.
Korolar 1.3.8 cos∠(−→a ,−→b ) =
α1β1 + α2β2 + α3β3√α2
1 + α22 + α2
3
√β2
1 + β22 + β2
3
.
Posebno, odredimo kosinuse kutova sto ga neki vektor −→a zatvara s vektorima ortonormiranebaze {−→i ,
−→j ,−→k }.
Prema prethodnom korolaru, vrijedi:
cos∠(−→a ,−→i ) =
α1
|−→a | , cos∠(−→a ,−→j ) =
α2
|−→a | , cos∠(−→a ,−→k ) =
α3
|−→a | . (1.6)
Te vrijednosti nazivamo kosinusi smjera vektora −→a .
Za kosinuse smjera vrijedi:
Korolar 1.3.9 Neka je −→a ∈ V 3. Tada je
cos2 ∠(−→a ,−→i ) + cos2 ∠(−→a ,
−→j ) + cos2 ∠(−→a ,
−→k ) = 1.
Dokaz. Kvadriranjem i zbrajanjem formula (1.6).
Zadatak. Dokazite nejednakost Schwarz-Cauchy-Bunjakowskog : Za (α1, α2, α3),(β1, β2, β3) ∈ R3 vrijedi
|α1β1 + α2β2 + α3β3| ≤√
α21 + α2
2 + α23
√β2
1 + β22 + β2
3 .
Rjesenje. Uvedimo vektore −→a ,−→b ∈ V 3 kojima su prikazi u nekoj ortonormiranoj bazi dani s
−→a = (α1, α2, α3),−→b = (β1, β2, β3).
Ako je −→a =−→0 ili
−→b =
−→0 , tvrdnja ocito vrijedi. Za −→a 6= −→
0 ,−→b 6= −→
0 imamo
|−→a · −→b | = |−→a ||−→b || cos∠(−→a ,−→b )| ≤ |−→a ||−→b |
jer je | cos∠(−→a ,−→b )| ≤ 1.
Uocimo da u prethodnoj tvrdnji jednakost vrijedi ako i samo ako su vektori kolinearni.
27

Zadaci
1. Kako definirati skalarni produkt u V 2 i V 1? Kako tada glasi zapis preko koordinatavektora?
2. Cine li vektori (1, 0, 0), (0, 1, 0), (0, 0,−1) ortonormiranu bazu od V 3?
3. Neka je ~a = (1,−3, 3), ~b = (−2, 0, 1). Izracunaj:
(a) ~a ·~b,(b) (~a− 2~b)(~a + 2~b).
[a) 1, b) −1
]
4. Neka su ~a i ~b vektori za koje je |~a| = 1, |~b| = 3 i ∠(~a,~b) =π
3. Izracunajte skalarni
produkt vektora ~a + 3~b i 2~a−~b. [−35
2
]
5. Vektori ~a, ~b i ~c su jedinicni, a kutevi medu njima su ∠(~a,~b) =π
6, ∠(~b,~c) =
5π
6,
∠(~c,~a) =π
6. Izracunajte duljine dijagonala paralelograma odredenog vektorima ~m =
2~a +~b− ~c i ~n = −3~a +~b− ~c. [5,
√9 + 4
√3
]
6. Navedite barem jedan vektor okomit na vektor (−5, 3, 0).[(3, 5, 0), (0, 0, 1), (−6,−10, 7)
]
7. Odredite a ∈ R tako da vektori ~x = (a, 0, 1 − a) i ~y = (a − 1, 2a, 2) budu medusobnookomiti. [
a = 1, a = 2]
8. Neka je (~i,~j,~k) ortonormirana baza. Dani su vektori ~a = 2~i − 3~j + ~k, ~b = −3~i + 4~k i~c =~i−~j + 2~k. Odredite λ ∈ R tako da vektori ~a + λ~b i ~c budu okomiti. [
λ = −75
]
9. Odredite vrijednost parametra t ∈ R tako da vektori (−1, 0, 3) i (1, 2, t) zatvaraju istikut kao i vektori (2, 1, 0) i (t, 0, 0). [
t = 3± 4√
3]
10. Neka je ~a = (−1, 1, α) i ~b = (0, β, 2). Odredite α i β tako da bude ~a · ~b = −7 i|~a +~b| = √
2. [α = −3, β = −1 ili α = −13
5 , β = −95
]
11. Poznato je |~a| = 13, |~b| = 23 i |~a +~b| = 30. Odredite |~a−~b|.
28

[4√
31]
12. Ako je ~a +~b + ~c = ~0, i ako su poznati moduli tih vektora, odredite ~a ·~b +~b · ~c + ~c · ~a.[−1
2(|~a|2 + |~b|2 + |~c|2)]
13. Dokazite da za bilo koje vektore ~a, ~b vrijedi |~a−~b| ≥ ||~a|− |~b||. Kada vrijedi jednakost?[
Jednakost vrijedi za kolinearne vektore iste orijentacije]
14. Odredite kut izmedu vektora ~a,~b ∈ V 3 ako je
(a) ~a ⊥ (2~a +~b) i (2~a−~b) ⊥ (3~a +~b).(b) (2~a−~b) ⊥ (~a +~b) i (~a− 2~b) ⊥ (2~a +~b);
[a) ϕ = 3π
4 , b) cosϕ = − 1√10
]
15. Ako je ~a · ~b = 5, |~b| = 2 i ~x vektor kolinearan s ~a + ~b takav da je ~x · ~b = 18, cemu jejednak ~x?
[~x = 2~a + 2~b
]
16. Za zadane vektore ~a, ~b odredite vektor ~p koji je ortogonalna projekcija vektora ~b navektor ~a.
[~p =
~a ·~b|~a|2 ~a
]
17. Dana je kocka ABCDA′B′C ′D′ duljine brida 4. Neka je tocka M srediste osnoviceA′B′C ′D′, a N srediste strane BCC ′B′. Odrediti module vektora
−−→AM i
−−→AN i kut medu
njima.[|−−→AM | = |−−→AN | = 2
√6, cosϕ = 5
6
]
18. Romb je cetverokut (paralelogram) kojem su sve stranice jednakih duljina. Dokazite dasu dijagonale romba medusobno okomite.
19. Ako su tezisnice AA1 i BB1 trokuta ABC medusobno okomite, dokazite da tada vrijedi|BC|2 + |AC|2 = 5|AB|2.
20. Ako su u trostranoj piramidi dva para nasuprotnih bridova okomita, onda je okomit itreci par. Dokazite.
21. Dane su tocke A = (−3, 5, 6), B = (1,−5, 7), C = (8,−3,−1) i D = (4, 7,−2). Dokaziteda je cetverokut ABCD kvadrat.
22. Dani su vrhovi trokuta: A = (3, 6), B = (−1, 3) i C = (2,−1). Izracunajte duljinestranica i duljinu visine trokuta iz tocke C.
[|AB| = 5, |BC| = 5, |AC| = 5
√2, vc = 5
]
29

1.4 Vektorski produkt
Vektorski produkt vektora definiramo samo u vektorskom prostoru V 3. Operacijom vektorskogmnozenja dvaju vektora opet dobivamo vektor kojeg opisujemo pomocu njegovog modula,smjera i orijentacije. Da bismo definirali orijentaciju vektorskog produkta dvaju vektora,uvodimo pojam desno orijentirane (desne, pozitivno orijentirane) baze prostora V 3. Zabazu {−→a ,
−→b ,−→c } od V 3 kazemo da je desno orijentirana ili desna ako promatrajuci s vrha
vektora −→c uocavamo obilazak od vektora −→a do vektora−→b kracim putom kao obilazak u
smjeru suprotnom od smjera kazaljke na satu (pozitivan obilazak). Za baze za koje je tajobilazak u smjeru kazaljke na satu, kazemo da su lijevo orijentirane (lijeve, negativnoorijentirane). Tipican primjer desne baze {−→a ,
−→b ,−→c } prikazan je na slici
@@
@R
6
©©©©©¼−→a−→b
−→c
Je li baza desna ili lijeva mozemo odrediti i pravilom desne ruke odnosno desnog vijka. Kodpravila desne ruke ispruzeni palac pokazuje prvi vektor, ispruzeni kaziprst pokazuje drugivektor, a savinuti srednji prst treci vektor. Kod pravila desnog vijka zaokruzenim prstimaod kaziprsta do malog prsta pokazujemo obilazak od prvog do drugog vektora, a treci vektorje odreden ispruzenim palcom.
Vektorsko mnozenje definiramo na sljedeci nacin:
Definicija 1.4.1 Vektorsko mnozenje je operacija × : V 3 × V 3 → V 3 koja paru vektora(−→a ,
−→b ) pridruzuje vektor −→c = −→a ×−→b definiran na sljedeci nacin:
1. ako su vektori −→a ,−→b kolinearni, tada je −→c =
−→0 ;
2. ako su vektori −→a ,−→b nekolinearni, tada je
(a) modul |−→c | = |−→a ||−→b | sin∠(−→a ,−→b ),
(b) smjer od −→c je smjer okomit na smjer od −→a i na smjer od−→b ,
(c) orijentacija od −→c je takva da je uredena trojka {−→a ,−→b ,−→c } desna baza od V 3.
Sliku −→a ×−→b vektora −→a ,−→b nazivamo vektorskim umnoskom ili vektorskim produktom
vektora −→a ,−→b .
Zadatak. Ako su vektori −→a ,−→b nekolinearni, zasto vektori {−→a ,
−→b ,−→a ×−→b } cine bazu?
Modul vektorskog produkta nekolinearnih vektora ima i geometrijsku interpretaciju: skalar|−→a ×−→b | jednak je povrsini paralelograma odredenog vektorima −→a ,
−→b .
30

-¢¢¢¢¢¢
¢¢¢¢¢¢
−→a
−→bv
Zaista, P = |−→a |v = |−→a ||−→b | sin∠(−→a ,−→b ) = |−→a ×−→b |.
Propozicija 1.4.1 Vrijedi −→a ×−→b =−→0 ako i samo ako su vektori −→a ,
−→b kolinearni.
Dokaz. Ako su vektori −→a ,−→b kolinearni, tada je −→a ×−→b =
−→0 po definiciji. Obratno, neka je
−→a ×−→b =−→0 . Pretpostavimo da −→a ,
−→b nisu kolinearni. Tada bi bilo
|−→a ||−→b | sin∠(−→a ,−→b ) = 0,
odakle je |−→a | = 0 ili |−→b | = 0 ili sin∠(−→a ,−→b ) = 0. Iz prve jednakosti slijedi −→a =
−→0 , iz druge−→
b =−→0 , a iz trece ∠(−→a ,
−→b ) ∈ {0, π}. Svaka od tih mogucnosti suprotna je pretpostavci (da
su vektori −→a ,−→b nekolinearni).
Korolar 1.4.2 Za svaki −→a ∈ V 3 vrijedi −→a ×−→a =−→0 .
Vektorsko mnozenje ima sljedeca svojstva:
Teorem 1.4.3 Za svaki −→a ,−→b ,−→c ∈ V 3, λ ∈ R vrijedi:
1. −→a ×−→b = −−→b ×−→a , antikomutativnost
2. (λ−→a )×−→b = λ(−→a ×−→b ), kvaziasocijativnost
3. (−→a +−→b )×−→c = −→a ×−→c +
−→b ×−→c , distributivnost prema zbrajanju.
Dokaz.
1. Dokazujemo jednakost dvaju vektora. U tu svrhu trebamo pokazati da ti vektori imajujednake module, smjer i orijentaciju. To se direktno provjerava primjenom definicije.
2. Provjerimo takoder modul, smjer i orijentaciju vektora na lijevoj i desnoj strani jed-nakosti. Za λ = 0 ti su vektori ocito jednaki. Neka je sad λ 6= 0. Tada za modul vektora(λ−→a )×−→b vrijedi
|(λ−→a )×−→b | = |λ−→a ||−→b | sin∠(λ−→a ,−→b ) = |λ||−→a ||−→b | sin∠(λ−→a ,
−→b ).
Ako je λ > 0, tada su vektori −→a i λ−→a jednako orijentirani, pa je ∠(λ−→a ,−→b ) = ∠(−→a ,
−→b ).
Ako je λ < 0, tada je ∠(λ−→a ,−→b ) = π − ∠(−→a ,
−→b ), no sin∠(λ−→a ,
−→b ) = sin∠(−→a ,
−→b ). U
oba slucaja je
|(λ−→a )×−→b | = |λ|(|−→a ||−→b | sin∠(−→a ,−→b )) = |λ||−→a ×−→b | = |λ(−→a ×−→b )|,
31

cime je pokazano da su moduli vektora s lijeve i desne strane jednakosti jednaki.
Nadalje, smjer vektora (λ−→a )×−→b jednak je smjeru vektora λ(−→a ×−→b ), naime oba vektoraimaju smjer kao vektor −→a × −→b . Orijentacije tih vektora su takoder jednake: za λ > 0vektori su jednako orijentirani kao vektor −→a ×−→b , dok su za λ < 0 oba vektora suprotnoorijentirana od vektora −→a ×−→b .
3. Zadatak 13. ovog poglavlja ili zadatak 11. u poglavlju Mjesoviti produkt.
Za vektorsko mnozenje takoder vrijedi:
Korolar 1.4.4 Za sve −→a ,−→b ,−→c ∈ V 3, λ ∈ R vrijedi:
2.’ −→a × (λ−→b ) = λ(−→a ×−→b ) kvaziasocijativnost
3.’ −→a × (−→b +−→c ) = −→a ×−→b +−→a ×−→c distributivnost prema zbrajanju.
Dokaz.
2.’ Koristeci antikomutativnost vektorskog mnozenja zakljucujemo
−→a × (λ−→b ) = −(λ
−→b )×−→a = −λ(
−→b ×−→a ) = λ(−→a ×−→b ).
3.’ Analogno, koristeci antikomutativnost vektorskog mnozenja.
Vektorsko mnozenje nije asocijativno, tj. opcenito vektori (−→a ×−→b )×−→c i −→a × (−→b ×−→c ) nisu
jednaki. Pokazimo to primjerom: neka su vektori −→a ,−→b ,−→c ∈ V 3 komplanarni (oznacimo s π
ravninu s kojom su paralelni) i neka −→a ,−→c nisu kolinearni. Tada su vektori −→a ×−→b i−→b ×−→c
okomiti na π, te su vektori (−→a ×−→b )×−→c i −→a ×(−→b ×−→c ) paralelni s π. No vektor (−→a ×−→b )×−→c
okomit je na −→c , dok je vektor −→a × (−→b ×−→c ) okomit na −→a .
Nadalje, vektorsko mnozenje ne posjeduje neutralni element tj. ne postoji vektor −→e ∈ V 3 zakoji bi vrijedilo −→a ×−→e = −→e ×−→a = −→a , −→a ∈ V 3.
Naime, zbog antikomutativnosti ne moze biti −→a × −→e = −→e × −→a , niti −→a × −→e = −→a ne mozevrijediti za svaki −→a ∈ V 3 jer je −→a ×−→e ⊥ −→a .
Zadatak. Pokazite Lagrangeov identitet
(−→a ×−→b )2 = −→a 2−→b 2 − (−→a · −→b )2.
Rjesenje.(−→a ×−→b )2 = |−→a ×−→b |2 = (|−→a ||−→b | sin∠(−→a ,
−→b ))2 =
|−→a |2|−→b |2(1− cos2 ∠(−→a ,−→b )) = |−→a |2|−→b |2 − (−→a · −→b )2.
32

Cilj nam je sada naci formulu za vektorski produkt vektora koji su zadani svojim koordinatamau nekoj (desnoj) ortonormiranoj bazi. U tu svrhu, uvedimo pojam determinante drugog itreceg reda.
Determinanta drugog reda je funkcija koja brojevima a, b, c, d ∈ R pridruzuje realan brojzapisan na sljedeci nacin ∣∣∣∣
a bc d
∣∣∣∣ = ad− bc.
Determinanta treceg reda je funkcija koja brojevima α1, α2, α3, β1, β2, β3, γ1, γ2, γ3 ∈ Rpridruzuje realan broj zapisan na sljedeci nacin
∣∣∣∣∣∣
α1 α2 α3
β1 β2 β3
γ1 γ2 γ3
∣∣∣∣∣∣= α1β2γ3 + α2β3γ1 + α3β1γ2 − α3β2γ1 − α2β1γ3 − α1β3γ2.
Izlucivanjem α1, α2, α3 iz prethodnog izraza, determinantu treceg reda mozemo zapisati idrugacije
∣∣∣∣∣∣
α1 α2 α3
β1 β2 β3
γ1 γ2 γ3
∣∣∣∣∣∣= α1
∣∣∣∣β2 β3
γ2 γ3
∣∣∣∣− α2
∣∣∣∣β1 β3
γ1 γ3
∣∣∣∣ + α3
∣∣∣∣β1 β2
γ1 γ2
∣∣∣∣ ,
sto nazivamo razvojem determinante po prvom retku.
Formalno, u retku determinante pisat cemo i vektore. Primjerice,∣∣∣∣−→i
−→j
1 2
∣∣∣∣ = 2−→i −−→j .
Lakim racunom mogu se dokazati sljedeca svojstva determinante drugog i treceg reda:
1. Ako je jedan redak (stupac) determinante jednak 0, tada je determinanta jednaka 0.
2. Zamjenom dva retka (stupca) determinanta mijenja predznak.
3. Ako su reci (stupci) determinante proporcionalni, tada je determinanta jednaka 0.
Propozicija 1.4.5 Neka je {−→i ,−→j ,−→k } desna ortonormirana baza vektorskog prostora V 3 i
neka su −→a = (α1, α2, α3),−→b = (β1, β2, β3) koordinatni prikazi vektora −→a ,
−→b u toj bazi. Tada
vrijedi
−→a ×−→b =
∣∣∣∣∣∣
−→i
−→j
−→k
α1 α2 α3
β1 β2 β3
∣∣∣∣∣∣. (1.7)
Dokaz. Tablica vektorskog mnozenja za elemente baze izgleda ovako
× −→i
−→j
−→k
−→i
−→0
−→k −−→j
−→j −−→k −→
0−→i
−→k
−→j −−→i −→
0
33

Koristeci tablicu i svojstva vektorskog mnozenja sada imamo
−→a ×−→b = (α1−→i + α2
−→j + α3
−→k )× (β1
−→i + β2
−→j + β3
−→k ) =
(α2β3 − α3β2, α3β1 − α1β3, α1β2 − α2β1),
sto mozemo napisati u obliku determinante (1.7).
Utvrdili smo da vektorsko mnozenje nije asocijativno. Produkte koje smo razmatrali mozemozapisati na sljedeci nacin:
Propozicija 1.4.6 Za −→a ,−→b ,−→c ∈ V 3 vrijedi
1. (−→a ×−→b )×−→c = (−→a · −→c )−→b − (
−→b · −→c )−→a ,
2. −→a × (−→b ×−→c ) = (−→a · −→c )
−→b − (−→a · −→b )−→c .
Dokaz. Tvrdnje dokazujemo koordinatno, rastavom vektora u koordinatne prikaze u desnojortonormiranoj bazi i koristenjem odgovarajucih formula za skalarni i vektorski produkt. Ilus-tracije radi, pokazimo samo da je prva koordinata vektora (−→a ×−→b )×−→c lijeve strane jednakostijednaka prvoj koordinati vektora (−→a · −→c )
−→b − (
−→b · −→c )−→a desne strane te jednakosti. Zaista,
ako oznacimo−→d = −→a ×−→b = (δ1, δ2, δ3), tada je trazena prva koordinata jednaka
δ2γ3 − δ3γ2 = (α3β1 − α1β3)γ3 − (α1β2 − α2β1)γ2 == (α2γ2 + α3γ3)β1 − (β2γ2 + β3γ3)α1
= (−→a · −→c )β1 − (−→b · −→c )α1.
Korolar 1.4.7 (Jacobijev identitet) Za −→a ,−→b ,−→c ∈ V 3 vrijedi
(−→a ×−→b )×−→c + (−→b ×−→c )×−→a + (−→c ×−→a )×−→b =
−→0 .
Dokaz. Iz propozicije 1.4.6 slijedi
(−→a ×−→b )×−→c = (−→a · −→c )−→b − (
−→b · −→c )−→a ,
(−→b ×−→c )×−→a = (
−→b · −→a )−→c − (−→c · −→a )
−→b ,
(−→c ×−→a )×−→b = (−→c · −→b )−→a − (−→a · −→b )−→c .
Zbrajanjem tih jednakosti dobivamo tvrdnju.
Uocimo da prethodni identitet pokazuje da su vektori (−→a ×−→b )×−→c , (−→b ×−→c )×−→a , (−→c ×−→a )×−→b
komplanarni.
Vektorski prostor V 3 uz operaciju vektorskog mnozenja koja zadovoljava svojstva 1, 2, 3, 2′, 3′,i Jacobijev identitet postaje primjer strukture koja se naziva Liejeva algebra nad R.
34

Zadaci
1. Izracunajte determinante:∣∣∣∣∣∣
1 0 02 3 04 5 6
∣∣∣∣∣∣
∣∣∣∣∣∣
2 4 84 1 −51 2 4
∣∣∣∣∣∣
∣∣∣∣∣∣
0 0 −23 −1 02 2 0
∣∣∣∣∣∣
∣∣∣∣∣∣
1 −2 00 6 01 2 −2
∣∣∣∣∣∣[
18, 0, −16, −12]
2. Za koje vrijednosti parametra a je sljedeca determinanta jednaka nuli?∣∣∣∣∣∣
a− 1 1 −1a 3 −a1 −1 3
∣∣∣∣∣∣ [a = 1, a = 6
]
3. Uvjerite se u ispravnost sljedecih pravila za determinante reda 3:
(a) Ako determinanta ima dva jednaka retka, ona je jednaka nuli.
(b) Ako je jedan redak jednak zbroju druga dva, determinanta je jednaka nuli.
(c) Ako zamijenimo dva retka, determinanta mijenja predznak.
(d) Ako sve elemente u nekom retku pomnozimo nekim brojem, i vrijednost determi-nante ce biti pomnozena istim brojem.
(e) Ako prvi redak zamijenimo sumom prvog i drugog retka, determinanta se ne mi-jenja.
(f) Ako prvom retku pribrojimo drugi redak pomnozen nekim faktorom, determinantase nece promijeniti.
(g) Ako prvom retku pribrojimo linearnu kombinaciju ostalih redaka, determinanta senece promijeniti.
(h) Ako zamijenimo retke i stupce, determinanta se ne mijenja.
(i) Ako bilo kojem retku (stupcu) pribrojimo linearnu kombinaciju ostalih redaka (stu-paca), determinanta se nece promijeniti.
4. Izracunajte vektorski produkt vektora
(a) (5, 2,−3), (−2, 1, 4).
(b) (4,−2, 1), (−3, 5, 2).[
a) (11,−14, 9); b) (−9,−11, 14)]
5. Neka je |~a| = 3, |~b| = 5 i |~a−~b| = 4. Izracunajte |~a×~b|.[
12]
6. Neka je |~a| = 1, |~b| = 9 i |~a×~b| = 3. Odredite ~a ·~b.[±6√
2]
35

7. Neka je |~a| = 10 i |~b| = 5.
(a) Ako je ~a ·~b = 30, koliko je |~a×~b|?(b) Ako je |~a×~b| = 100, koliko je ~a ·~b?
[a) 40, b) ±25
√3
]
8. Neka je ~a = (1, 1, 1), ~b = (1, 1, 0) i ~c = (1,−1, 0). Odredite vektor ~x tako da bude~x · ~a = 3 i ~x×~b = ~c. [
~x = (1, 1, 1)]
9. Neka su ~m i ~n jedinicni vektori koji zatvaraju kut π4 . Odredite povrsinu paralelograma
s dijagonalama ~e = 2~m− ~n i ~f = 4~m− 5~n.[
3√
22
]
10. Dani su vektori ~a = (2, 0,−1) i ~b = (1,−1, 3). Odredite m,n ∈ R tako da vektor m~a+n~bbude okomit na ravninu odredenu vektorima ~x = (1, 2, 3) i ~y = (1, 1, 1).
[jedini takav vektor m~a + n~b je nulvektor, dakle m = n = 0
]
11. Dani su vektori ~a = (0, 2λ, λ), ~b = (2, 2, 1) i ~c = (−1,−2,−1).
(a) Odredite vektor ~d tako da vrijedi ~a×~b = ~c× ~d i ~a× ~c = ~b× ~d.(b) Pokazite da su vektori ~a− ~d i ~b− ~c kolinearni.(c) Pokazite da su vektori ~a×~b, ~a× ~c i ~d komplanarni.(d) Odredite λ tako da vrijedi (~a−~b) · ~c = ~a · ~c + λ.
[a) ~d = (−3λ,−2λ,−λ); b) ~a− ~d = λ(~b− ~c); c) ~a×~b = −~a× ~c; d) λ = 7
]
12. Kako glasi odgovarajuca tablica mnozenja, a kako formula za vektorski produkt izpropozicije 1.4.5, ako je polazna baza {−→i ,
−→j ,−→k } lijeva (a definicija vektorskog mnozenja
nepromijenjena)?
13. Dokazite distributivnost vektorskog mnozenja prema zbrajanju
~a× (~b + ~c) = ~a×~b + ~a× ~c.
Uputa. Dokaz provodimo u nekoliko koraka:
(a) Pokazite da vrijedi ~a ×~b = ~a ×~b⊥, gdje je ~b⊥ ortogonalna projekcija vektora ~b naravninu okomitu na vektor ~a. Pokazite to tako da usporedite module, smjerove iorijentacije vektora lijeve i desne strane navedene jednakosti.
(b) Uocite da je vektor ~a×~b⊥ u ravnini okomitoj na ~a koji je okomit i na ~b⊥. Mozemoga interpretirati kao vektor odgovarajuceg modula u ravnini okomitoj na ~a dobivenrotacijom (u ravnini okomitoj na ~a) vektora ~b⊥ u pozitivnom smjeru za π
2 .(c) Koristeci da je (1) projekcija zbroja vektora jednaka zbroju projekcija vektora i da
je (2) rotacija zbroja vektora jednaka zbroju rotiranih vektora konacno imamo
~a× (~b + ~c) = ~a× (~b + ~c)⊥(1)= ~a× (~b⊥ + ~c⊥)
(2)= ~a×~b⊥ + ~a× ~c⊥ = ~a×~b + ~a× ~c.
36

1.5 Mjesoviti produkt
Definicija 1.5.1 Operaciju m : V 3 × V 3 × V 3 → R koja trojci vektora (−→a ,−→b ,−→c ) pridruzuje
skalar (−→a ×−→b ) · −→c nazivamo mjesovitim mnozenjem.
Rezultat (−→a ×−→b ) · −→c ∈ R nazivamo mjesovitim umnoskom ili mjesovitim produktom.
Koristimo i oznaku m(−→a ,−→b ,−→c ) = (−→a ,
−→b ,−→c ).
Propozicija 1.5.1 Mjesoviti produkt triju vektora jednak je 0 ako i samo ako su vektorikomplanarni.
Dokaz. Neka su vektori −→a ,−→b ,−→c komplanarni. Pokazimo da je njihov mjesoviti produkt
jednak 0. Ako su, posebno, −→a × −→b ili −→c jednaki−→0 (−→a × −→b =
−→0 ako i samo ako su −→a ,
−→b
kolinearni, pa su zaista −→a ,−→b ,−→c komplanarni), tada je (−→a ,
−→b ,−→c ) = 0. Jos razmotrimo
situaciju kad su −→a ×−→b i −→c razliciti od nulvektora. Kako je −→a ×−→b 6= −→0 , to vektori −→a ,
−→b nisu
kolinearni, nego su paralelni s nekom ravninom, nazovimo je π. Vektor −→c je po pretpostavcitakoder paralelan s tom ravninom. No, po definiciji vektorskog produkta, vektor −→a × −→b jeokomit na π, pa je −→a ×−→b ⊥ −→c . Dakle, (−→a ×−→b ) · −→c = 0.
Obratno, ako je mjesoviti produkt vektora −→a ,−→b ,−→c jednak 0, to znaci da je −→a ×−→b =
−→0 ili
−→c =−→0 ili −→a ×−→b ⊥ −→c . U prvom slucaju su vektori −→a i
−→b su kolinearni. U trecem slucaju
vektor −→c je paralelan s ravninom odredenom sa −→a ,−→b . Dakle, u svim slucajevima vektori −→a ,−→
b i −→c su komplanarni.
Navedimo sada, slicno kao za vektorski produkt, geometrijsku interpretaciju mjesovitog pro-dukta.
Neka su −→a ,−→b ,−→c ∈ V 3, −→a = [
−→OA],
−→b = [
−−→OB], −→c = [
−−→OC] tri nekomplanarna vektora. Oni
u prostoru odreduju jedan paralelepiped. Kazemo da je paralelepiped razapet vektorima−→a ,
−→b ,−→c .
-©©©©©*
££££££££±
©©©©©
££££££££
££££££££
££££££££©©©©©
©©©©©
−→a
−→b
−→c
O
Propozicija 1.5.2 Volumen paralelepipeda razapetog vektorima −→a ,−→b ,−→c jednak je apsolutnoj
vrijednosti mjesovitog produkta (−→a ,−→b ,−→c ).
Dokaz. Visina h paralelepipeda jednaka je duljini ortogonalne projekcije vektora −→c na vektor−→a ×−→b :
h = |−→c | | cos∠(−→a ×−→b ,−→c )|.
37

Osnovka paralelepipeda je paralelogram odreden vektorima −→a ,−→b , te je njegova povrsina
jednaka |−→a ×−→b |. Prema tome, volumen paralelepipeda jednak je
V = Bh = |−→a ×−→b |h = |−→a ×−→b ||−→c | | cos∠(−→a ×−→b ,−→c )|= |(−→a ×−→b ) · −→c | = |(−→a ,
−→b ,−→c )|.
Sljedeca svojstva mjesovitog produkta posljedica su definicije i odgovarajucih svojstavaskalarnog i vektorskog produkta:
Propozicija 1.5.3 Za −→a ,−→a1,−→a2,
−→b ,−→c ∈ V 3, λ ∈ R, vrijedi
1. (−→a1 +−→a2,−→b ,−→c ) = (−→a1,
−→b ,−→c ) + (−→a2,
−→b ,−→c ) ,
2. (λ−→a ,−→b ,−→c ) = λ(−→a ,
−→b ,−→c ).
Analogno vrijede i sljedeca svojstva:
Korolar 1.5.4 Za −→a ,−→b ,−→b1 ,−→b2 ,−→c ,−→c1 ,−→c2 ∈ V 3, λ ∈ R, vrijedi
1.’ (−→a ,−→b1 +
−→b2 ,−→c ) = (−→a ,
−→b1 ,−→c ) + (−→a ,
−→b2 ,−→c )
2.’ (−→a , λ−→b ,−→c ) = λ(−→a ,
−→b ,−→c )
1.” (−→a ,−→b ,−→c1 +−→c2) = (−→a ,
−→b ,−→c1) + (−→a ,
−→b ,−→c2)
2.” (−→a ,−→b , λ−→c ) = λ(−→a ,
−→b ,−→c ).
Konacno, i za mjesoviti produkt mozemo izvesti formulu u slucaju kada su vektori dani svojimkoordinatnim prikazima u desnoj ortonormiranoj bazi. Neka je {−→i ,
−→j ,−→k } desna ortonormi-
rana baza i neka su −→a = (α1, α2, α3),−→b = (β1, β2, β3), −→c = (γ1, γ2, γ3) koordinatni prikazi
vektora s obzirom na tu bazu. Iz propozicija 1.3.5 i 1.4.5 slijedi
(−→a ,−→b ,−→c ) = (−→a ×−→b ) · −→c
= (α2β3 − α3β2, α3β1 − α1β3, α1β2 − α2β1) · (γ1, γ2, γ3)= α1β2γ3 + α2β3γ1 + α3β1γ2 − α3β2γ1 − α2β1γ3 − α1β3γ2.
Dokazali smo:
Propozicija 1.5.5 Mjesoviti produkt vektora −→a ,−→b , −→c jednak je
(−→a ,−→b ,−→c ) =
∣∣∣∣∣∣
α1 α2 α3
β1 β2 β3
γ1 γ2 γ3
∣∣∣∣∣∣.
38

Korolar 1.5.6 Tri vektora su komplanarna ako i samo ako za njihove koordinatne prikaze udesnoj ortonormiranoj bazi vrijedi
∣∣∣∣∣∣
α1 α2 α3
β1 β2 β3
γ1 γ2 γ3
∣∣∣∣∣∣= 0.
Iz propozicije 1.5.5 i svojstva determinante da zamjenom redaka mijenja predznak, za-kljucujemo
Propozicija 1.5.7 Za −→a ,−→b ,−→c ∈ V 3 vrijedi
(−→a ,−→b ,−→c ) = (
−→b ,−→c ,−→a ) = (−→c ,−→a ,
−→b )
= −(−→b ,−→a ,−→c ) = −(−→a ,−→c ,
−→b ) = −(−→c ,
−→b ,−→a ).
Dokazimo i svojstvo mjesovitog produkta da operacije mogu zamijeniti uloge:
Korolar 1.5.8 Za −→a ,−→b ,−→c ∈ V 3 vrijedi
(−→a ×−→b ) · −→c = −→a · (−→b ×−→c ).
Dokaz.
(−→a ×−→b ) · −→c = (−→a ,−→b ,−→c ) = (
−→b ,−→c ,−→a ) = (
−→b ×−→c ) · −→a = −→a · (−→b ×−→c ).
Zadaci
1. Jesu li baze (~i,~j,~k), i (~i−~j,~i +~j − ~k, 2~i−~j + 3~k), jednako orijentirane?
[Da
]
2. Izraz[(2~a− 3~b + ~c)× (~c− ~a)
]· (~a + ~c) pojednostavnite, a zatim izracunajte njegovu
vrijednost ako je ~a = (−4, 2, 7), ~b = (3,−2, 0), ~c = (0,−4, 1). [492
]
3. Provjerite da je ((~a +~b + ~c)× (~a− 2~b + 2~c)) · (4~a +~b + 5~c) = 0.
4. Dokazite da su vektori β~a− α~b, γ~b− β~c i α~c− γ~a uvijek komplanarni.
5. Nadite vektor ~x u ovisnosti od vektora ~a i ~b ako je: ~a ⊥ ~x, ~b ⊥ ~x i |~x|=3.
[~x = ±3
~a×~b
|~a×~b|]
6. Dani su vektori ~a = (1,−1, 3), ~b = (2, 0,−1) i ~c = (−4, 2, 1).
39

(a) Odredite volumen paralelepipeda odredenog vektorima ~a, ~b i ~c. Da li su ti vektorilinearno zavisni? Obrazlozite.
(b) Odredite t ∈ R tako da vektor ~v = ~a×~b + t~c lezi u ravnini odredenoj vektorima ~ai ~b. Za dobiveni t prikazite ~v kao linearnu kombinaciju vektora ~a i ~b.
[a) V = 12, linearno su nezavisni; b) t = −9
2 , 2~a + 172~b
]
7. Paralelepiped je odreden vektorima ~a = (2t, 1, 1− t), ~b = (−1, 3, 0) i ~c = (5,−1, 8).
(a) Odredite t ∈ R tako da vektor ~a tvori jednake kuteve s vektorima ~b i ~c.
(b) Za dobiveni t, odrediti kut koji vektor ~c zatvara s ravninom odredenom vektorima~a i ~b.
(c) Za isti t, odredite volumen paralelepipeda i njegovu visinu nad osnovicomodredenom vektorima ~a i ~b. [
a) t = 14 ; b) ϕ ≈ 70◦15′; c) V = 19
2 , v =√
385
]
8. Dokazite da je (~a×~b) · (~c× ~d) = (~a · ~c) · (~b · ~d)− (~b · ~c) · (~a · ~d).
9. Dani su vektori ~a = (1, 2, 1), ~b = (1,−1, 2) i ~c = (2, 1,−1). Odredite ortogonalnuprojekciju vektora ~b na vektor ~a× (~b× ~c). [
~x = 1966(~i− 4~j + 7~k)
]
10. Kod trostrane prizme ABCA′B′C ′ vektori−−→AB = (0, 1,−1) i
−→AC = (2,−1, 4) odreduju
njenu bazu, a vektor−−→AA′ = (−3, 2, 2) bocnu stranicu. Nadite:
(a) volumen prizme,
(b) povrsinu osnovice ABC,
(c) visinu prizme. [a) 17
2 , b)√
172 , c)
√17
]
11. Dokazite distributivnost vektorskog mnozenja prema zbrajanju
~a× (~b + ~c) = ~a×~b + ~a× ~c. (1.8)
Uputa. Dokaz provodimo u nekoliko koraka:
(a) Pokazimo da ako za svaki ~x ∈ V 3 vrijedi ~u · ~x = ~v · ~x, tada je ~u = ~v.Zaista, zbog distributivnosti skalarnog mnozenja prema zbrajanju, iz pretpostavkeslijedi (~u− ~v) · ~x = 0 za svaki ~x ∈ V 3. Posebno ta jednakost vrijedi i za ~x = ~u− ~v.Iz pozitivne definitnosti skalarnog mnozenja sada slijedi ~u− ~v = ~0.
(b) Vrijedi sljedeca ciklicka zamjena
(~a,~b,~c) = (~b,~c,~a) = (~c,~a,~b).
Iako smo se vec uvjerili (koristenjem svojstava determinante) da vrijedi taj niz jed-nakosti, uvjerimo se da vrijedi i zbog geometrijske interpretacije mjesovitog pro-dukta (jednakost volumena). Naime, u dokazu tog niza tvrdnji moramo izbjecikoristenje svojstva koje dokazujemo – distributivnost vektorskog mnozenja premazbrajanju.
40

(c) Konacno, pokazimo (1.8). U tu svrhu, dovoljno je pokazati da za svaki vektor~x ∈ V 3 vrijedi (
~a× (~b + ~c))· ~x =
(~a×~b + ~a× ~c
)· ~x.
Koristenjem tvrdnje (ciklicke zamjene) iz (b), te distributivnosti skalarnog mnozenjaprema zbrajanju (*) zakljucujemo
(~a× (~b + ~c)
)· ~x (b)
= (~x× ~a) · (~b + ~c)
(∗)= (~x× ~a) ·~b + (~x× ~a) · ~c(b)= (~a×~b) · ~x + (~a× ~c) · ~x(∗)=
(~a×~b + ~a× ~c
)· ~x.
41


















