Matematika 1 (determinanti, vektori, analiticka geometrija).pdf

Analiticka geometrija
Predavanje 5
Parametrizacija krivih u ravni
Novi Sad, 2019.
Milica Žigic (DMI, PMF, UNS 2019) Analiticka geometrija predavanje 5 1 / 14

Parametrizacija krivih u ravni
Parametarski zadata krivaNeka su f ,g : I ⊂ R→ R neprekidne1
funkcije nad intervalom I. Skup tacaka uravni (x , y) = (f (t),g(t)), t ∈ I nazivamoparametarski zadata kriva u(koordinatnoj) ravni. Jednacine
x = f (t) i y = g(t), t ∈ Ise nazivaju parametarske jednacine krive,promenljiva t je parametar krive, a intervalI je domen parametra.
Ako je I zatvoren interval, I = [a,b], a < b onda je (f (a),g(a)) pocetna tacka,dok je (f (b),g(b)) krajnja tacka krive.Kada zadamo parametarske jednacine i odredimo domen parametra, kažemoda smo parametrizovali krivu. Odnosno, jednacine i domen parametra cineparametrizaciju krive.
* Parametar t može da se interpretira kao vreme, ili ugao,. . .
1obicno se traži i više, npr. neprekidna diferencijabilnost koordinatnih funkcijaMilica Žigic (DMI, PMF, UNS 2019) Analiticka geometrija predavanje 5 2 / 14

Parametrizacija krivih u ravni
Parametarski zadata krivaNeka su f ,g : I ⊂ R→ R neprekidne1
funkcije nad intervalom I. Skup tacaka uravni (x , y) = (f (t),g(t)), t ∈ I nazivamoparametarski zadata kriva u(koordinatnoj) ravni. Jednacine
x = f (t) i y = g(t), t ∈ Ise nazivaju parametarske jednacine krive,promenljiva t je parametar krive, a intervalI je domen parametra.
Ako je I zatvoren interval, I = [a,b], a < b onda je (f (a),g(a)) pocetna tacka,dok je (f (b),g(b)) krajnja tacka krive.Kada zadamo parametarske jednacine i odredimo domen parametra, kažemoda smo parametrizovali krivu. Odnosno, jednacine i domen parametra cineparametrizaciju krive.
* Parametar t može da se interpretira kao vreme, ili ugao,. . .
1obicno se traži i više, npr. neprekidna diferencijabilnost koordinatnih funkcijaMilica Žigic (DMI, PMF, UNS 2019) Analiticka geometrija predavanje 5 2 / 14

Parametrizacija krivih u ravni
Parametarski zadata krivaNeka su f ,g : I ⊂ R→ R neprekidne1
funkcije nad intervalom I. Skup tacaka uravni (x , y) = (f (t),g(t)), t ∈ I nazivamoparametarski zadata kriva u(koordinatnoj) ravni. Jednacine
x = f (t) i y = g(t), t ∈ Ise nazivaju parametarske jednacine krive,promenljiva t je parametar krive, a intervalI je domen parametra.
Ako je I zatvoren interval, I = [a,b], a < b onda je (f (a),g(a)) pocetna tacka,dok je (f (b),g(b)) krajnja tacka krive.Kada zadamo parametarske jednacine i odredimo domen parametra, kažemoda smo parametrizovali krivu. Odnosno, jednacine i domen parametra cineparametrizaciju krive.
* Parametar t može da se interpretira kao vreme, ili ugao,. . .
1obicno se traži i više, npr. neprekidna diferencijabilnost koordinatnih funkcijaMilica Žigic (DMI, PMF, UNS 2019) Analiticka geometrija predavanje 5 2 / 14

Parametrizacija krivih u ravni
Parametarski zadata krivaNeka su f ,g : I ⊂ R→ R neprekidne1
funkcije nad intervalom I. Skup tacaka uravni (x , y) = (f (t),g(t)), t ∈ I nazivamoparametarski zadata kriva u(koordinatnoj) ravni. Jednacine
x = f (t) i y = g(t), t ∈ Ise nazivaju parametarske jednacine krive,promenljiva t je parametar krive, a intervalI je domen parametra.
Ako je I zatvoren interval, I = [a,b], a < b onda je (f (a),g(a)) pocetna tacka,dok je (f (b),g(b)) krajnja tacka krive.Kada zadamo parametarske jednacine i odredimo domen parametra, kažemoda smo parametrizovali krivu. Odnosno, jednacine i domen parametra cineparametrizaciju krive.
* Parametar t može da se interpretira kao vreme, ili ugao,. . .
1obicno se traži i više, npr. neprekidna diferencijabilnost koordinatnih funkcijaMilica Žigic (DMI, PMF, UNS 2019) Analiticka geometrija predavanje 5 2 / 14

Parametrizacija krivih u ravni
Parametarski zadata krivaNeka su f ,g : I ⊂ R→ R neprekidne1
funkcije nad intervalom I. Skup tacaka uravni (x , y) = (f (t),g(t)), t ∈ I nazivamoparametarski zadata kriva u(koordinatnoj) ravni. Jednacine
x = f (t) i y = g(t), t ∈ Ise nazivaju parametarske jednacine krive,promenljiva t je parametar krive, a intervalI je domen parametra.
Ako je I zatvoren interval, I = [a,b], a < b onda je (f (a),g(a)) pocetna tacka,dok je (f (b),g(b)) krajnja tacka krive.Kada zadamo parametarske jednacine i odredimo domen parametra, kažemoda smo parametrizovali krivu. Odnosno, jednacine i domen parametra cineparametrizaciju krive.
* Parametar t može da se interpretira kao vreme, ili ugao,. . .
1obicno se traži i više, npr. neprekidna diferencijabilnost koordinatnih funkcijaMilica Žigic (DMI, PMF, UNS 2019) Analiticka geometrija predavanje 5 2 / 14

Parametrizacija krivih u ravni, primeri
1◦ prava
x = t , y = 2t , t ∈ Rx = t
2 , y = t , t ∈ R . . . sporije kretanjemedutim, i ovim jednacinama dobijamo istiskup rešenja u ravni, tj. istu krivu
x = −t , y = −2t , t ∈ R . . . drugi smerdakle, parametrizacija nije jedinstvena
Primetimo da parametrizacijom krive dobijamo i informaciju o orjentaciji(usmerenju) kriveNa primer, ako bi kriva opisivala položaj cestice u ravni u vremenu t ,onda bi nam parametrizacija otkrila i smer kretanja cesticeParametrizacija, takode, daje i informaciju o "brzini" kretanja cesticeDakle, ako krivu opišemo parametarskim jednacinama onda mi o njojdobijamo i dodatne informacije koje nemamo u kanonskim jednacinama
Milica Žigic (DMI, PMF, UNS 2019) Analiticka geometrija predavanje 5 3 / 14

Parametrizacija krivih u ravni, primeri
1◦ prava
x = t , y = 2t , t ∈ Rx = t
2 , y = t , t ∈ R . . . sporije kretanjemedutim, i ovim jednacinama dobijamo istiskup rešenja u ravni, tj. istu krivu
x = −t , y = −2t , t ∈ R . . . drugi smerdakle, parametrizacija nije jedinstvena
Primetimo da parametrizacijom krive dobijamo i informaciju o orjentaciji(usmerenju) kriveNa primer, ako bi kriva opisivala položaj cestice u ravni u vremenu t ,onda bi nam parametrizacija otkrila i smer kretanja cesticeParametrizacija, takode, daje i informaciju o "brzini" kretanja cesticeDakle, ako krivu opišemo parametarskim jednacinama onda mi o njojdobijamo i dodatne informacije koje nemamo u kanonskim jednacinama
Milica Žigic (DMI, PMF, UNS 2019) Analiticka geometrija predavanje 5 3 / 14

Parametrizacija krivih u ravni, primeri
1◦ prava
x = t , y = 2t , t ∈ Rx = t
2 , y = t , t ∈ R . . . sporije kretanjemedutim, i ovim jednacinama dobijamo istiskup rešenja u ravni, tj. istu krivu
x = −t , y = −2t , t ∈ R . . . drugi smerdakle, parametrizacija nije jedinstvena
Primetimo da parametrizacijom krive dobijamo i informaciju o orjentaciji(usmerenju) kriveNa primer, ako bi kriva opisivala položaj cestice u ravni u vremenu t ,onda bi nam parametrizacija otkrila i smer kretanja cesticeParametrizacija, takode, daje i informaciju o "brzini" kretanja cesticeDakle, ako krivu opišemo parametarskim jednacinama onda mi o njojdobijamo i dodatne informacije koje nemamo u kanonskim jednacinama
Milica Žigic (DMI, PMF, UNS 2019) Analiticka geometrija predavanje 5 3 / 14

Parametrizacija krivih u ravni, primeri
1◦ prava
x = t , y = 2t , t ∈ Rx = t
2 , y = t , t ∈ R . . . sporije kretanjemedutim, i ovim jednacinama dobijamo istiskup rešenja u ravni, tj. istu krivu
x = −t , y = −2t , t ∈ R . . . drugi smerdakle, parametrizacija nije jedinstvena
Primetimo da parametrizacijom krive dobijamo i informaciju o orjentaciji(usmerenju) kriveNa primer, ako bi kriva opisivala položaj cestice u ravni u vremenu t ,onda bi nam parametrizacija otkrila i smer kretanja cesticeParametrizacija, takode, daje i informaciju o "brzini" kretanja cesticeDakle, ako krivu opišemo parametarskim jednacinama onda mi o njojdobijamo i dodatne informacije koje nemamo u kanonskim jednacinama
Milica Žigic (DMI, PMF, UNS 2019) Analiticka geometrija predavanje 5 3 / 14

Parametrizacija krivih u ravni, primeri
1◦ prava
x = t , y = 2t , t ∈ Rx = t
2 , y = t , t ∈ R . . . sporije kretanjemedutim, i ovim jednacinama dobijamo istiskup rešenja u ravni, tj. istu krivu
x = −t , y = −2t , t ∈ R . . . drugi smerdakle, parametrizacija nije jedinstvena
Primetimo da parametrizacijom krive dobijamo i informaciju o orjentaciji(usmerenju) kriveNa primer, ako bi kriva opisivala položaj cestice u ravni u vremenu t ,onda bi nam parametrizacija otkrila i smer kretanja cesticeParametrizacija, takode, daje i informaciju o "brzini" kretanja cesticeDakle, ako krivu opišemo parametarskim jednacinama onda mi o njojdobijamo i dodatne informacije koje nemamo u kanonskim jednacinama
Milica Žigic (DMI, PMF, UNS 2019) Analiticka geometrija predavanje 5 3 / 14

Parametrizacija krivih u ravni, primeri
1◦ prava
x = t , y = 2t , t ∈ Rx = t
2 , y = t , t ∈ R . . . sporije kretanjemedutim, i ovim jednacinama dobijamo istiskup rešenja u ravni, tj. istu krivu
x = −t , y = −2t , t ∈ R . . . drugi smerdakle, parametrizacija nije jedinstvena
Primetimo da parametrizacijom krive dobijamo i informaciju o orjentaciji(usmerenju) kriveNa primer, ako bi kriva opisivala položaj cestice u ravni u vremenu t ,onda bi nam parametrizacija otkrila i smer kretanja cesticeParametrizacija, takode, daje i informaciju o "brzini" kretanja cesticeDakle, ako krivu opišemo parametarskim jednacinama onda mi o njojdobijamo i dodatne informacije koje nemamo u kanonskim jednacinama
Milica Žigic (DMI, PMF, UNS 2019) Analiticka geometrija predavanje 5 3 / 14

Parametrizacija krivih u ravni, primeri
1◦ prava
x = t , y = 2t , t ∈ Rx = t
2 , y = t , t ∈ R . . . sporije kretanjemedutim, i ovim jednacinama dobijamo istiskup rešenja u ravni, tj. istu krivu
x = −t , y = −2t , t ∈ R . . . drugi smerdakle, parametrizacija nije jedinstvena
Primetimo da parametrizacijom krive dobijamo i informaciju o orjentaciji(usmerenju) kriveNa primer, ako bi kriva opisivala položaj cestice u ravni u vremenu t ,onda bi nam parametrizacija otkrila i smer kretanja cesticeParametrizacija, takode, daje i informaciju o "brzini" kretanja cesticeDakle, ako krivu opišemo parametarskim jednacinama onda mi o njojdobijamo i dodatne informacije koje nemamo u kanonskim jednacinama
Milica Žigic (DMI, PMF, UNS 2019) Analiticka geometrija predavanje 5 3 / 14

Parametrizacija krivih u ravni, primeri
1◦ prava
x = t , y = 2t , t ∈ Rx = t
2 , y = t , t ∈ R . . . sporije kretanjemedutim, i ovim jednacinama dobijamo istiskup rešenja u ravni, tj. istu krivu
x = −t , y = −2t , t ∈ R . . . drugi smerdakle, parametrizacija nije jedinstvena
Primetimo da parametrizacijom krive dobijamo i informaciju o orjentaciji(usmerenju) kriveNa primer, ako bi kriva opisivala položaj cestice u ravni u vremenu t ,onda bi nam parametrizacija otkrila i smer kretanja cesticeParametrizacija, takode, daje i informaciju o "brzini" kretanja cesticeDakle, ako krivu opišemo parametarskim jednacinama onda mi o njojdobijamo i dodatne informacije koje nemamo u kanonskim jednacinama
Milica Žigic (DMI, PMF, UNS 2019) Analiticka geometrija predavanje 5 3 / 14

Parametrizacija krivih u ravni, primeri
2◦ parabola
x = t , y = t2, t ∈ Rdrugi smer...x = −t , y = t2, t ∈ Rveca brzina kretanja...x = 3t , y = 9t2, t ∈ R
3◦ pola parabole
x = t , y = t2, t ∈ [0,∞)
x =√
t , y = t , t ≥ 0promena domena parametra I se koristi zaizdvajanje dela kriva, ali voditi racuna i odefinisanosti f-ja f i g nad I
Milica Žigic (DMI, PMF, UNS 2019) Analiticka geometrija predavanje 5 4 / 14

Parametrizacija krivih u ravni, primeri
2◦ parabola
x = t , y = t2, t ∈ Rdrugi smer...x = −t , y = t2, t ∈ Rveca brzina kretanja...x = 3t , y = 9t2, t ∈ R
3◦ pola parabole
x = t , y = t2, t ∈ [0,∞)
x =√
t , y = t , t ≥ 0promena domena parametra I se koristi zaizdvajanje dela kriva, ali voditi racuna i odefinisanosti f-ja f i g nad I
Milica Žigic (DMI, PMF, UNS 2019) Analiticka geometrija predavanje 5 4 / 14

Parametrizacija krivih u ravni, primeri
2◦ parabola
x = t , y = t2, t ∈ Rdrugi smer...x = −t , y = t2, t ∈ Rveca brzina kretanja...x = 3t , y = 9t2, t ∈ R
3◦ pola parabole
x = t , y = t2, t ∈ [0,∞)
x =√
t , y = t , t ≥ 0promena domena parametra I se koristi zaizdvajanje dela kriva, ali voditi racuna i odefinisanosti f-ja f i g nad I
Milica Žigic (DMI, PMF, UNS 2019) Analiticka geometrija predavanje 5 4 / 14

Parametrizacija krivih u ravni, primeri
2◦ parabola
x = t , y = t2, t ∈ Rdrugi smer...x = −t , y = t2, t ∈ Rveca brzina kretanja...x = 3t , y = 9t2, t ∈ R
3◦ pola parabole
x = t , y = t2, t ∈ [0,∞)
x =√
t , y = t , t ≥ 0promena domena parametra I se koristi zaizdvajanje dela kriva, ali voditi racuna i odefinisanosti f-ja f i g nad I
Milica Žigic (DMI, PMF, UNS 2019) Analiticka geometrija predavanje 5 4 / 14

Parametrizacija krivih u ravni, primeri
2◦ parabola
x = t , y = t2, t ∈ Rdrugi smer...x = −t , y = t2, t ∈ Rveca brzina kretanja...x = 3t , y = 9t2, t ∈ R
3◦ pola parabole
x = t , y = t2, t ∈ [0,∞)
x =√
t , y = t , t ≥ 0promena domena parametra I se koristi zaizdvajanje dela kriva, ali voditi racuna i odefinisanosti f-ja f i g nad I
Milica Žigic (DMI, PMF, UNS 2019) Analiticka geometrija predavanje 5 4 / 14

Parametrizacija krivih u ravni, primeri
2◦ parabola
x = t , y = t2, t ∈ Rdrugi smer...x = −t , y = t2, t ∈ Rveca brzina kretanja...x = 3t , y = 9t2, t ∈ R
3◦ pola parabole
x = t , y = t2, t ∈ [0,∞)
x =√
t , y = t , t ≥ 0promena domena parametra I se koristi zaizdvajanje dela kriva, ali voditi racuna i odefinisanosti f-ja f i g nad I
Milica Žigic (DMI, PMF, UNS 2019) Analiticka geometrija predavanje 5 4 / 14

Parametrizacija krivih u ravni, primeri
2◦ parabola
x = t , y = t2, t ∈ Rdrugi smer...x = −t , y = t2, t ∈ Rveca brzina kretanja...x = 3t , y = 9t2, t ∈ R
3◦ pola parabole
x = t , y = t2, t ∈ [0,∞)
x =√
t , y = t , t ≥ 0promena domena parametra I se koristi zaizdvajanje dela kriva, ali voditi racuna i odefinisanosti f-ja f i g nad I
Milica Žigic (DMI, PMF, UNS 2019) Analiticka geometrija predavanje 5 4 / 14

Parametrizacija krivih u ravni, primeri
2◦ parabola
x = t , y = t2, t ∈ Rdrugi smer...x = −t , y = t2, t ∈ Rveca brzina kretanja...x = 3t , y = 9t2, t ∈ R
3◦ pola parabole
x = t , y = t2, t ∈ [0,∞)
x =√
t , y = t , t ≥ 0promena domena parametra I se koristi zaizdvajanje dela kriva, ali voditi racuna i odefinisanosti f-ja f i g nad I
Milica Žigic (DMI, PMF, UNS 2019) Analiticka geometrija predavanje 5 4 / 14

Parametrizacija krivih u ravni, primeri
2◦ parabola
x = t , y = t2, t ∈ Rdrugi smer...x = −t , y = t2, t ∈ Rveca brzina kretanja...x = 3t , y = 9t2, t ∈ R
3◦ pola parabole
x = t , y = t2, t ∈ [0,∞)
x =√
t , y = t , t ≥ 0promena domena parametra I se koristi zaizdvajanje dela kriva, ali voditi racuna i odefinisanosti f-ja f i g nad I
Milica Žigic (DMI, PMF, UNS 2019) Analiticka geometrija predavanje 5 4 / 14

Parametrizacija krivih u ravni, primeri
2◦ parabola
x = t , y = t2, t ∈ Rdrugi smer...x = −t , y = t2, t ∈ Rveca brzina kretanja...x = 3t , y = 9t2, t ∈ R
3◦ pola parabole
x = t , y = t2, t ∈ [0,∞)
x =√
t , y = t , t ≥ 0promena domena parametra I se koristi zaizdvajanje dela kriva, ali voditi racuna i odefinisanosti f-ja f i g nad I
Milica Žigic (DMI, PMF, UNS 2019) Analiticka geometrija predavanje 5 4 / 14

Parametrizacija krivih u ravni, primeri4◦ jedinicna kružnica
x = cos t , y = sin t , t ∈ [0,2π)drugi smer...x = cos t , y = − sin t , t ∈ [0,2π)parametar t uvek ide od manjeg ka vecembroju, npr. t ∈ [a, b], a < b
5◦ centrirana kružnica
x = r cos t , y = r sin t , t ∈ [0,2π)donja polukružnica...x = r cos t , y = −r sin t , t ∈ [0, π]ilix = −t , y = −
√r2 − t2, t ∈ [−r , r ]
primetimo da kada koristimo ovu vrstuparametrizacije, za celu kružnicu nam trebajudve parametrizacije (i y = +
√r 2 − t2)
Milica Žigic (DMI, PMF, UNS 2019) Analiticka geometrija predavanje 5 5 / 14

Parametrizacija krivih u ravni, primeri4◦ jedinicna kružnica
x = cos t , y = sin t , t ∈ [0,2π)drugi smer...x = cos t , y = − sin t , t ∈ [0,2π)parametar t uvek ide od manjeg ka vecembroju, npr. t ∈ [a, b], a < b
5◦ centrirana kružnica
x = r cos t , y = r sin t , t ∈ [0,2π)donja polukružnica...x = r cos t , y = −r sin t , t ∈ [0, π]ilix = −t , y = −
√r2 − t2, t ∈ [−r , r ]
primetimo da kada koristimo ovu vrstuparametrizacije, za celu kružnicu nam trebajudve parametrizacije (i y = +
√r 2 − t2)
Milica Žigic (DMI, PMF, UNS 2019) Analiticka geometrija predavanje 5 5 / 14

Parametrizacija krivih u ravni, primeri4◦ jedinicna kružnica
x = cos t , y = sin t , t ∈ [0,2π)drugi smer...x = cos t , y = − sin t , t ∈ [0,2π)parametar t uvek ide od manjeg ka vecembroju, npr. t ∈ [a, b], a < b
5◦ centrirana kružnica
x = r cos t , y = r sin t , t ∈ [0,2π)donja polukružnica...x = r cos t , y = −r sin t , t ∈ [0, π]ilix = −t , y = −
√r2 − t2, t ∈ [−r , r ]
primetimo da kada koristimo ovu vrstuparametrizacije, za celu kružnicu nam trebajudve parametrizacije (i y = +
√r 2 − t2)
Milica Žigic (DMI, PMF, UNS 2019) Analiticka geometrija predavanje 5 5 / 14

Parametrizacija krivih u ravni, primeri4◦ jedinicna kružnica
x = cos t , y = sin t , t ∈ [0,2π)drugi smer...x = cos t , y = − sin t , t ∈ [0,2π)parametar t uvek ide od manjeg ka vecembroju, npr. t ∈ [a, b], a < b
5◦ centrirana kružnica
x = r cos t , y = r sin t , t ∈ [0,2π)donja polukružnica...x = r cos t , y = −r sin t , t ∈ [0, π]ilix = −t , y = −
√r2 − t2, t ∈ [−r , r ]
primetimo da kada koristimo ovu vrstuparametrizacije, za celu kružnicu nam trebajudve parametrizacije (i y = +
√r 2 − t2)
Milica Žigic (DMI, PMF, UNS 2019) Analiticka geometrija predavanje 5 5 / 14

Parametrizacija krivih u ravni, primeri4◦ jedinicna kružnica
x = cos t , y = sin t , t ∈ [0,2π)drugi smer...x = cos t , y = − sin t , t ∈ [0,2π)parametar t uvek ide od manjeg ka vecembroju, npr. t ∈ [a, b], a < b
5◦ centrirana kružnica
x = r cos t , y = r sin t , t ∈ [0,2π)donja polukružnica...x = r cos t , y = −r sin t , t ∈ [0, π]ilix = −t , y = −
√r2 − t2, t ∈ [−r , r ]
primetimo da kada koristimo ovu vrstuparametrizacije, za celu kružnicu nam trebajudve parametrizacije (i y = +
√r 2 − t2)
Milica Žigic (DMI, PMF, UNS 2019) Analiticka geometrija predavanje 5 5 / 14

Parametrizacija krivih u ravni, primeri4◦ jedinicna kružnica
x = cos t , y = sin t , t ∈ [0,2π)drugi smer...x = cos t , y = − sin t , t ∈ [0,2π)parametar t uvek ide od manjeg ka vecembroju, npr. t ∈ [a, b], a < b
5◦ centrirana kružnica
x = r cos t , y = r sin t , t ∈ [0,2π)donja polukružnica...x = r cos t , y = −r sin t , t ∈ [0, π]ilix = −t , y = −
√r2 − t2, t ∈ [−r , r ]
primetimo da kada koristimo ovu vrstuparametrizacije, za celu kružnicu nam trebajudve parametrizacije (i y = +
√r 2 − t2)
Milica Žigic (DMI, PMF, UNS 2019) Analiticka geometrija predavanje 5 5 / 14

Parametrizacija krivih u ravni, primeri4◦ jedinicna kružnica
x = cos t , y = sin t , t ∈ [0,2π)drugi smer...x = cos t , y = − sin t , t ∈ [0,2π)parametar t uvek ide od manjeg ka vecembroju, npr. t ∈ [a, b], a < b
5◦ centrirana kružnica
x = r cos t , y = r sin t , t ∈ [0,2π)donja polukružnica...x = r cos t , y = −r sin t , t ∈ [0, π]ilix = −t , y = −
√r2 − t2, t ∈ [−r , r ]
primetimo da kada koristimo ovu vrstuparametrizacije, za celu kružnicu nam trebajudve parametrizacije (i y = +
√r 2 − t2)
Milica Žigic (DMI, PMF, UNS 2019) Analiticka geometrija predavanje 5 5 / 14

Parametrizacija krivih u ravni, primeri4◦ jedinicna kružnica
x = cos t , y = sin t , t ∈ [0,2π)drugi smer...x = cos t , y = − sin t , t ∈ [0,2π)parametar t uvek ide od manjeg ka vecembroju, npr. t ∈ [a, b], a < b
5◦ centrirana kružnica
x = r cos t , y = r sin t , t ∈ [0,2π)donja polukružnica...x = r cos t , y = −r sin t , t ∈ [0, π]ilix = −t , y = −
√r2 − t2, t ∈ [−r , r ]
primetimo da kada koristimo ovu vrstuparametrizacije, za celu kružnicu nam trebajudve parametrizacije (i y = +
√r 2 − t2)
Milica Žigic (DMI, PMF, UNS 2019) Analiticka geometrija predavanje 5 5 / 14

Parametrizacija krivih u ravni, primeri4◦ jedinicna kružnica
x = cos t , y = sin t , t ∈ [0,2π)drugi smer...x = cos t , y = − sin t , t ∈ [0,2π)parametar t uvek ide od manjeg ka vecembroju, npr. t ∈ [a, b], a < b
5◦ centrirana kružnica
x = r cos t , y = r sin t , t ∈ [0,2π)donja polukružnica...x = r cos t , y = −r sin t , t ∈ [0, π]ilix = −t , y = −
√r2 − t2, t ∈ [−r , r ]
primetimo da kada koristimo ovu vrstuparametrizacije, za celu kružnicu nam trebajudve parametrizacije (i y = +
√r 2 − t2)
Milica Žigic (DMI, PMF, UNS 2019) Analiticka geometrija predavanje 5 5 / 14

Parametrizacija krivih u ravni, primeri4◦ jedinicna kružnica
x = cos t , y = sin t , t ∈ [0,2π)drugi smer...x = cos t , y = − sin t , t ∈ [0,2π)parametar t uvek ide od manjeg ka vecembroju, npr. t ∈ [a, b], a < b
5◦ centrirana kružnica
x = r cos t , y = r sin t , t ∈ [0,2π)donja polukružnica...x = r cos t , y = −r sin t , t ∈ [0, π]ilix = −t , y = −
√r2 − t2, t ∈ [−r , r ]
primetimo da kada koristimo ovu vrstuparametrizacije, za celu kružnicu nam trebajudve parametrizacije (i y = +
√r 2 − t2)
Milica Žigic (DMI, PMF, UNS 2019) Analiticka geometrija predavanje 5 5 / 14

Parametrizacija krivih u ravni, primeri4◦ jedinicna kružnica
x = cos t , y = sin t , t ∈ [0,2π)drugi smer...x = cos t , y = − sin t , t ∈ [0,2π)parametar t uvek ide od manjeg ka vecembroju, npr. t ∈ [a, b], a < b
5◦ centrirana kružnica
x = r cos t , y = r sin t , t ∈ [0,2π)donja polukružnica...x = r cos t , y = −r sin t , t ∈ [0, π]ilix = −t , y = −
√r2 − t2, t ∈ [−r , r ]
primetimo da kada koristimo ovu vrstuparametrizacije, za celu kružnicu nam trebajudve parametrizacije (i y = +
√r 2 − t2)
Milica Žigic (DMI, PMF, UNS 2019) Analiticka geometrija predavanje 5 5 / 14

Parametrizacija krivih u ravni, primeri
6◦ centrirana elipsa
x = a cos t , y = b sin t , t ∈ [0,2π)
zaista, tada za svako t ∈ [0,2π) važia2 cos2 t
a2 +b2 sin2 t
b2 = 1
7◦ centrirana hiperbola
desna grana...x =
acos t
, y = b tg t , t ∈ (−π/2, π/2)leva grana...x = − a
cos t, y = b tg t , t ∈ (−π/2, π/2)
zaista,a2
a2 cos2 t− b2tg2t
b2 =1− sin2 tcos2 t
= 1
Milica Žigic (DMI, PMF, UNS 2019) Analiticka geometrija predavanje 5 6 / 14

Parametrizacija krivih u ravni, primeri
6◦ centrirana elipsa
x = a cos t , y = b sin t , t ∈ [0,2π)
zaista, tada za svako t ∈ [0,2π) važia2 cos2 t
a2 +b2 sin2 t
b2 = 1
7◦ centrirana hiperbola
desna grana...x =
acos t
, y = b tg t , t ∈ (−π/2, π/2)leva grana...x = − a
cos t, y = b tg t , t ∈ (−π/2, π/2)
zaista,a2
a2 cos2 t− b2tg2t
b2 =1− sin2 tcos2 t
= 1
Milica Žigic (DMI, PMF, UNS 2019) Analiticka geometrija predavanje 5 6 / 14

Parametrizacija krivih u ravni, primeri
6◦ centrirana elipsa
x = a cos t , y = b sin t , t ∈ [0,2π)
zaista, tada za svako t ∈ [0,2π) važia2 cos2 t
a2 +b2 sin2 t
b2 = 1
7◦ centrirana hiperbola
desna grana...x =
acos t
, y = b tg t , t ∈ (−π/2, π/2)leva grana...x = − a
cos t, y = b tg t , t ∈ (−π/2, π/2)
zaista,a2
a2 cos2 t− b2tg2t
b2 =1− sin2 tcos2 t
= 1
Milica Žigic (DMI, PMF, UNS 2019) Analiticka geometrija predavanje 5 6 / 14

Parametrizacija krivih u ravni, primeri
6◦ centrirana elipsa
x = a cos t , y = b sin t , t ∈ [0,2π)
zaista, tada za svako t ∈ [0,2π) važia2 cos2 t
a2 +b2 sin2 t
b2 = 1
7◦ centrirana hiperbola
desna grana...x =
acos t
, y = b tg t , t ∈ (−π/2, π/2)leva grana...x = − a
cos t, y = b tg t , t ∈ (−π/2, π/2)
zaista,a2
a2 cos2 t− b2tg2t
b2 =1− sin2 tcos2 t
= 1
Milica Žigic (DMI, PMF, UNS 2019) Analiticka geometrija predavanje 5 6 / 14

CikloidaCikloidaNeka se tocak poluprecnika a kotrlja po ravnoj podlozi. Oznacimo sa P tackukoja je fiksirana na rubu tocka. Odrediti parametarske jednacine krive kojaopisuje kretanje tacke P dok se tocak kotrlja po podlozi. Dobijena kriva senaziva cikloida (cikloid).
t – ugao za koji je tocak zarotiranM(xM ,0) – projekcija centra C na x−osunakon rotacije za ugao t , te xM odgovaradužini kružnog luka nad uglom tdakle, xM = t
2πO = t2π2aπ = at
C(at ,a) – centar tocka nakon rotacije zaugao tKonacno, važi P(at + x ′,a + y ′), gde jex ′ = a cosφ, y ′ = a sinφ, φ = 3π
2 − tP(at+a cos( 3π
2 −t),a+a sin( 3π2 −t)), t ∈ R
P(at − a sin t ,a− a cos t), t ∈ RMilica Žigic (DMI, PMF, UNS 2019) Analiticka geometrija predavanje 5 7 / 14

CikloidaCikloidaNeka se tocak poluprecnika a kotrlja po ravnoj podlozi. Oznacimo sa P tackukoja je fiksirana na rubu tocka. Odrediti parametarske jednacine krive kojaopisuje kretanje tacke P dok se tocak kotrlja po podlozi. Dobijena kriva senaziva cikloida (cikloid).
t – ugao za koji je tocak zarotiranM(xM ,0) – projekcija centra C na x−osunakon rotacije za ugao t , te xM odgovaradužini kružnog luka nad uglom tdakle, xM = t
2πO = t2π2aπ = at
C(at ,a) – centar tocka nakon rotacije zaugao tKonacno, važi P(at + x ′,a + y ′), gde jex ′ = a cosφ, y ′ = a sinφ, φ = 3π
2 − tP(at+a cos( 3π
2 −t),a+a sin( 3π2 −t)), t ∈ R
P(at − a sin t ,a− a cos t), t ∈ RMilica Žigic (DMI, PMF, UNS 2019) Analiticka geometrija predavanje 5 7 / 14

CikloidaCikloidaNeka se tocak poluprecnika a kotrlja po ravnoj podlozi. Oznacimo sa P tackukoja je fiksirana na rubu tocka. Odrediti parametarske jednacine krive kojaopisuje kretanje tacke P dok se tocak kotrlja po podlozi. Dobijena kriva senaziva cikloida (cikloid).
t – ugao za koji je tocak zarotiranM(xM ,0) – projekcija centra C na x−osunakon rotacije za ugao t , te xM odgovaradužini kružnog luka nad uglom tdakle, xM = t
2πO = t2π2aπ = at
C(at ,a) – centar tocka nakon rotacije zaugao tKonacno, važi P(at + x ′,a + y ′), gde jex ′ = a cosφ, y ′ = a sinφ, φ = 3π
2 − tP(at+a cos( 3π
2 −t),a+a sin( 3π2 −t)), t ∈ R
P(at − a sin t ,a− a cos t), t ∈ RMilica Žigic (DMI, PMF, UNS 2019) Analiticka geometrija predavanje 5 7 / 14

CikloidaCikloidaNeka se tocak poluprecnika a kotrlja po ravnoj podlozi. Oznacimo sa P tackukoja je fiksirana na rubu tocka. Odrediti parametarske jednacine krive kojaopisuje kretanje tacke P dok se tocak kotrlja po podlozi. Dobijena kriva senaziva cikloida (cikloid).
t – ugao za koji je tocak zarotiranM(xM ,0) – projekcija centra C na x−osunakon rotacije za ugao t , te xM odgovaradužini kružnog luka nad uglom tdakle, xM = t
2πO = t2π2aπ = at
C(at ,a) – centar tocka nakon rotacije zaugao tKonacno, važi P(at + x ′,a + y ′), gde jex ′ = a cosφ, y ′ = a sinφ, φ = 3π
2 − tP(at+a cos( 3π
2 −t),a+a sin( 3π2 −t)), t ∈ R
P(at − a sin t ,a− a cos t), t ∈ RMilica Žigic (DMI, PMF, UNS 2019) Analiticka geometrija predavanje 5 7 / 14

CikloidaCikloidaNeka se tocak poluprecnika a kotrlja po ravnoj podlozi. Oznacimo sa P tackukoja je fiksirana na rubu tocka. Odrediti parametarske jednacine krive kojaopisuje kretanje tacke P dok se tocak kotrlja po podlozi. Dobijena kriva senaziva cikloida (cikloid).
t – ugao za koji je tocak zarotiranM(xM ,0) – projekcija centra C na x−osunakon rotacije za ugao t , te xM odgovaradužini kružnog luka nad uglom tdakle, xM = t
2πO = t2π2aπ = at
C(at ,a) – centar tocka nakon rotacije zaugao tKonacno, važi P(at + x ′,a + y ′), gde jex ′ = a cosφ, y ′ = a sinφ, φ = 3π
2 − tP(at+a cos( 3π
2 −t),a+a sin( 3π2 −t)), t ∈ R
P(at − a sin t ,a− a cos t), t ∈ RMilica Žigic (DMI, PMF, UNS 2019) Analiticka geometrija predavanje 5 7 / 14

CikloidaCikloidaNeka se tocak poluprecnika a kotrlja po ravnoj podlozi. Oznacimo sa P tackukoja je fiksirana na rubu tocka. Odrediti parametarske jednacine krive kojaopisuje kretanje tacke P dok se tocak kotrlja po podlozi. Dobijena kriva senaziva cikloida (cikloid).
t – ugao za koji je tocak zarotiranM(xM ,0) – projekcija centra C na x−osunakon rotacije za ugao t , te xM odgovaradužini kružnog luka nad uglom tdakle, xM = t
2πO = t2π2aπ = at
C(at ,a) – centar tocka nakon rotacije zaugao tKonacno, važi P(at + x ′,a + y ′), gde jex ′ = a cosφ, y ′ = a sinφ, φ = 3π
2 − tP(at+a cos( 3π
2 −t),a+a sin( 3π2 −t)), t ∈ R
P(at − a sin t ,a− a cos t), t ∈ RMilica Žigic (DMI, PMF, UNS 2019) Analiticka geometrija predavanje 5 7 / 14

CikloidaCikloidaNeka se tocak poluprecnika a kotrlja po ravnoj podlozi. Oznacimo sa P tackukoja je fiksirana na rubu tocka. Odrediti parametarske jednacine krive kojaopisuje kretanje tacke P dok se tocak kotrlja po podlozi. Dobijena kriva senaziva cikloida (cikloid).
t – ugao za koji je tocak zarotiranM(xM ,0) – projekcija centra C na x−osunakon rotacije za ugao t , te xM odgovaradužini kružnog luka nad uglom tdakle, xM = t
2πO = t2π2aπ = at
C(at ,a) – centar tocka nakon rotacije zaugao tKonacno, važi P(at + x ′,a + y ′), gde jex ′ = a cosφ, y ′ = a sinφ, φ = 3π
2 − tP(at+a cos( 3π
2 −t),a+a sin( 3π2 −t)), t ∈ R
P(at − a sin t ,a− a cos t), t ∈ RMilica Žigic (DMI, PMF, UNS 2019) Analiticka geometrija predavanje 5 7 / 14

CikloidaCikloidaNeka se tocak poluprecnika a kotrlja po ravnoj podlozi. Oznacimo sa P tackukoja je fiksirana na rubu tocka. Odrediti parametarske jednacine krive kojaopisuje kretanje tacke P dok se tocak kotrlja po podlozi. Dobijena kriva senaziva cikloida (cikloid).
t – ugao za koji je tocak zarotiranM(xM ,0) – projekcija centra C na x−osunakon rotacije za ugao t , te xM odgovaradužini kružnog luka nad uglom tdakle, xM = t
2πO = t2π2aπ = at
C(at ,a) – centar tocka nakon rotacije zaugao tKonacno, važi P(at + x ′,a + y ′), gde jex ′ = a cosφ, y ′ = a sinφ, φ = 3π
2 − tP(at+a cos( 3π
2 −t),a+a sin( 3π2 −t)), t ∈ R
P(at − a sin t ,a− a cos t), t ∈ RMilica Žigic (DMI, PMF, UNS 2019) Analiticka geometrija predavanje 5 7 / 14

CikloidaCikloidaNeka se tocak poluprecnika a kotrlja po ravnoj podlozi. Oznacimo sa P tackukoja je fiksirana na rubu tocka. Odrediti parametarske jednacine krive kojaopisuje kretanje tacke P dok se tocak kotrlja po podlozi. Dobijena kriva senaziva cikloida (cikloid).
t – ugao za koji je tocak zarotiranM(xM ,0) – projekcija centra C na x−osunakon rotacije za ugao t , te xM odgovaradužini kružnog luka nad uglom tdakle, xM = t
2πO = t2π2aπ = at
C(at ,a) – centar tocka nakon rotacije zaugao tKonacno, važi P(at + x ′,a + y ′), gde jex ′ = a cosφ, y ′ = a sinφ, φ = 3π
2 − tP(at+a cos( 3π
2 −t),a+a sin( 3π2 −t)), t ∈ R
P(at − a sin t ,a− a cos t), t ∈ RMilica Žigic (DMI, PMF, UNS 2019) Analiticka geometrija predavanje 5 7 / 14

CikloidaCikloidaNeka se tocak poluprecnika a kotrlja po ravnoj podlozi. Oznacimo sa P tackukoja je fiksirana na rubu tocka. Odrediti parametarske jednacine krive kojaopisuje kretanje tacke P dok se tocak kotrlja po podlozi. Dobijena kriva senaziva cikloida (cikloid).
t – ugao za koji je tocak zarotiranM(xM ,0) – projekcija centra C na x−osunakon rotacije za ugao t , te xM odgovaradužini kružnog luka nad uglom tdakle, xM = t
2πO = t2π2aπ = at
C(at ,a) – centar tocka nakon rotacije zaugao tKonacno, važi P(at + x ′,a + y ′), gde jex ′ = a cosφ, y ′ = a sinφ, φ = 3π
2 − tP(at+a cos( 3π
2 −t),a+a sin( 3π2 −t)), t ∈ R
P(at − a sin t ,a− a cos t), t ∈ RMilica Žigic (DMI, PMF, UNS 2019) Analiticka geometrija predavanje 5 7 / 14

Cikloida
Cikloida je kriva u ravni data parametarskim jednacinama
x = at − a sin t , y = a− a cos t , t ∈ R
cikloida
Desmos ... cikloida
Milica Žigic (DMI, PMF, UNS 2019) Analiticka geometrija predavanje 5 8 / 14

Cikloida
je i brahistohronaputanja po kojoj se krece telo od O do B poddejstvom sile gravitacije za najkrace vreme
je i tautohronatelo koje krene iz O i telo koje krene iz C (bezpocetne brzine) ce za isto vreme stici do Bkoristeci ovaj princip povecana je preciznostcasovnika sa klatnom
Milica Žigic (DMI, PMF, UNS 2019) Analiticka geometrija predavanje 5 9 / 14

Cikloida
je i brahistohronaputanja po kojoj se krece telo od O do B poddejstvom sile gravitacije za najkrace vreme
je i tautohronatelo koje krene iz O i telo koje krene iz C (bezpocetne brzine) ce za isto vreme stici do Bkoristeci ovaj princip povecana je preciznostcasovnika sa klatnom
Milica Žigic (DMI, PMF, UNS 2019) Analiticka geometrija predavanje 5 9 / 14

Cikloida
je i brahistohronaputanja po kojoj se krece telo od O do B poddejstvom sile gravitacije za najkrace vreme
je i tautohronatelo koje krene iz O i telo koje krene iz C (bezpocetne brzine) ce za isto vreme stici do Bkoristeci ovaj princip povecana je preciznostcasovnika sa klatnom
Milica Žigic (DMI, PMF, UNS 2019) Analiticka geometrija predavanje 5 9 / 14

Primer 1, kriva veštice Anjezi
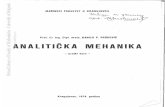
Neka je data kružnica poluprecnika 1 sa centrom u (0,1). Proizvoljnu tacku Ana pravoj y = 2 povežemo sa koordinatnim pocetkom O i sa B obeležimopresek date kružnice i duži OA. Tacka P se dobija kao presek vertikalne pravekroz tacku A i horizontalne kroz tacku B. Odrediti jednacinu krive koja opisujepoložaj tacke P u ravni dok tacka A ide duž prave y = 2.Napomena: Ime krive je nastalo kao greška pri prevodu sa latinskog, pravilanprevod bi bio "uže koje vraca jedro".
Mogu se koristiti sledece cinjenice:d(A,B) · d(O,A) = d2(A,Q),gde je Q(0,2);zatim, za tacku P(x , y) važix = d(A,Q), y = 2− d(A,B) sin t ,gde je t ugao koji duž OA gradi spozitivnim delom x−ose.
Milica Žigic (DMI, PMF, UNS 2019) Analiticka geometrija predavanje 5 10 / 14

Primer 1, kriva veštice Anjezi
Neka je data kružnica poluprecnika 1 sa centrom u (0,1). Proizvoljnu tacku Ana pravoj y = 2 povežemo sa koordinatnim pocetkom O i sa B obeležimopresek date kružnice i duži OA. Tacka P se dobija kao presek vertikalne pravekroz tacku A i horizontalne kroz tacku B. Odrediti jednacinu krive koja opisujepoložaj tacke P u ravni dok tacka A ide duž prave y = 2.Napomena: Ime krive je nastalo kao greška pri prevodu sa latinskog, pravilanprevod bi bio "uže koje vraca jedro".
Mogu se koristiti sledece cinjenice:d(A,B) · d(O,A) = d2(A,Q),gde je Q(0,2);zatim, za tacku P(x , y) važix = d(A,Q), y = 2− d(A,B) sin t ,gde je t ugao koji duž OA gradi spozitivnim delom x−ose.
Milica Žigic (DMI, PMF, UNS 2019) Analiticka geometrija predavanje 5 10 / 14

Primer 1, kriva veštice Anjezi
Neka je data kružnica poluprecnika 1 sa centrom u (0,1). Proizvoljnu tacku Ana pravoj y = 2 povežemo sa koordinatnim pocetkom O i sa B obeležimopresek date kružnice i duži OA. Tacka P se dobija kao presek vertikalne pravekroz tacku A i horizontalne kroz tacku B. Odrediti jednacinu krive koja opisujepoložaj tacke P u ravni dok tacka A ide duž prave y = 2.Napomena: Ime krive je nastalo kao greška pri prevodu sa latinskog, pravilanprevod bi bio "uže koje vraca jedro".
Mogu se koristiti sledece cinjenice:d(A,B) · d(O,A) = d2(A,Q),gde je Q(0,2);zatim, za tacku P(x , y) važix = d(A,Q), y = 2− d(A,B) sin t ,gde je t ugao koji duž OA gradi spozitivnim delom x−ose.
Milica Žigic (DMI, PMF, UNS 2019) Analiticka geometrija predavanje 5 10 / 14

Primer 1, kriva veštice Anjezi
Neka je data kružnica poluprecnika 1 sa centrom u (0,1). Proizvoljnu tacku Ana pravoj y = 2 povežemo sa koordinatnim pocetkom O i sa B obeležimopresek date kružnice i duži OA. Tacka P se dobija kao presek vertikalne pravekroz tacku A i horizontalne kroz tacku B. Odrediti jednacinu krive koja opisujepoložaj tacke P u ravni dok tacka A ide duž prave y = 2.Napomena: Ime krive je nastalo kao greška pri prevodu sa latinskog, pravilanprevod bi bio "uže koje vraca jedro".
Mogu se koristiti sledece cinjenice:d(A,B) · d(O,A) = d2(A,Q),gde je Q(0,2);zatim, za tacku P(x , y) važix = d(A,Q), y = 2− d(A,B) sin t ,gde je t ugao koji duž OA gradi spozitivnim delom x−ose.
Milica Žigic (DMI, PMF, UNS 2019) Analiticka geometrija predavanje 5 10 / 14

Primer 1, kriva veštice Anjezi
Neka je data kružnica poluprecnika 1 sa centrom u (0,1). Proizvoljnu tacku Ana pravoj y = 2 povežemo sa koordinatnim pocetkom O i sa B obeležimopresek date kružnice i duži OA. Tacka P se dobija kao presek vertikalne pravekroz tacku A i horizontalne kroz tacku B. Odrediti jednacinu krive koja opisujepoložaj tacke P u ravni dok tacka A ide duž prave y = 2.Napomena: Ime krive je nastalo kao greška pri prevodu sa latinskog, pravilanprevod bi bio "uže koje vraca jedro".
Mogu se koristiti sledece cinjenice:d(A,B) · d(O,A) = d2(A,Q),gde je Q(0,2);zatim, za tacku P(x , y) važix = d(A,Q), y = 2− d(A,B) sin t ,gde je t ugao koji duž OA gradi spozitivnim delom x−ose.
Milica Žigic (DMI, PMF, UNS 2019) Analiticka geometrija predavanje 5 10 / 14

Primer 1, kriva veštice Anjezi
Neka je data kružnica poluprecnika 1 sa centrom u (0,1). Proizvoljnu tacku Ana pravoj y = 2 povežemo sa koordinatnim pocetkom O i sa B obeležimopresek date kružnice i duži OA. Tacka P se dobija kao presek vertikalne pravekroz tacku A i horizontalne kroz tacku B. Odrediti jednacinu krive koja opisujepoložaj tacke P u ravni dok tacka A ide duž prave y = 2.Napomena: Ime krive je nastalo kao greška pri prevodu sa latinskog, pravilanprevod bi bio "uže koje vraca jedro".
Mogu se koristiti sledece cinjenice:d(A,B) · d(O,A) = d2(A,Q),gde je Q(0,2);zatim, za tacku P(x , y) važix = d(A,Q), y = 2− d(A,B) sin t ,gde je t ugao koji duž OA gradi spozitivnim delom x−ose.
Milica Žigic (DMI, PMF, UNS 2019) Analiticka geometrija predavanje 5 10 / 14

Primer 1, kriva veštice AnjeziOdredimo prvo d(A,Q). Iz pravouglog trougla 4OAQ vidimo da je]OAQ = t , te je ctg t = d(A,Q)
d(O,Q) , odnosno
x = d(A,Q) = 2ctg t
Odredimo zatim i d(A,B). Iz d(A,B) · d(O,A) = d2(A,Q) dobimao da jed(A,B) = d2(A,Q)
d(O,A) = d2(A,Q)√d2(O,Q)+d2(A,Q)
= 4ctg2t√4+4ctg2t
= 2 cos2 tsin t . Dakle,
y = 2− 2cos2 tsin t
sin t = 2(1− cos2 t) = 2 sin2 t
Primetimo, s obzirom da prava p(O,A) sece pravu y = 2, dobijamo dat ∈ (0, π)
Milica Žigic (DMI, PMF, UNS 2019) Analiticka geometrija predavanje 5 11 / 14

Primer 1, kriva veštice AnjeziOdredimo prvo d(A,Q). Iz pravouglog trougla 4OAQ vidimo da je]OAQ = t , te je ctg t = d(A,Q)
d(O,Q) , odnosno
x = d(A,Q) = 2ctg t
Odredimo zatim i d(A,B). Iz d(A,B) · d(O,A) = d2(A,Q) dobimao da jed(A,B) = d2(A,Q)
d(O,A) = d2(A,Q)√d2(O,Q)+d2(A,Q)
= 4ctg2t√4+4ctg2t
= 2 cos2 tsin t . Dakle,
y = 2− 2cos2 tsin t
sin t = 2(1− cos2 t) = 2 sin2 t
Primetimo, s obzirom da prava p(O,A) sece pravu y = 2, dobijamo dat ∈ (0, π)
Milica Žigic (DMI, PMF, UNS 2019) Analiticka geometrija predavanje 5 11 / 14

Primer 1, kriva veštice AnjeziOdredimo prvo d(A,Q). Iz pravouglog trougla 4OAQ vidimo da je]OAQ = t , te je ctg t = d(A,Q)
d(O,Q) , odnosno
x = d(A,Q) = 2ctg t
Odredimo zatim i d(A,B). Iz d(A,B) · d(O,A) = d2(A,Q) dobimao da jed(A,B) = d2(A,Q)
d(O,A) = d2(A,Q)√d2(O,Q)+d2(A,Q)
= 4ctg2t√4+4ctg2t
= 2 cos2 tsin t . Dakle,
y = 2− 2cos2 tsin t
sin t = 2(1− cos2 t) = 2 sin2 t
Primetimo, s obzirom da prava p(O,A) sece pravu y = 2, dobijamo dat ∈ (0, π)
Milica Žigic (DMI, PMF, UNS 2019) Analiticka geometrija predavanje 5 11 / 14

Primer 1, kriva veštice AnjeziOdredimo prvo d(A,Q). Iz pravouglog trougla 4OAQ vidimo da je]OAQ = t , te je ctg t = d(A,Q)
d(O,Q) , odnosno
x = d(A,Q) = 2ctg t
Odredimo zatim i d(A,B). Iz d(A,B) · d(O,A) = d2(A,Q) dobimao da jed(A,B) = d2(A,Q)
d(O,A) = d2(A,Q)√d2(O,Q)+d2(A,Q)
= 4ctg2t√4+4ctg2t
= 2 cos2 tsin t . Dakle,
y = 2− 2cos2 tsin t
sin t = 2(1− cos2 t) = 2 sin2 t
Primetimo, s obzirom da prava p(O,A) sece pravu y = 2, dobijamo dat ∈ (0, π)
Milica Žigic (DMI, PMF, UNS 2019) Analiticka geometrija predavanje 5 11 / 14

Primer 1, kriva veštice AnjeziOdredimo prvo d(A,Q). Iz pravouglog trougla 4OAQ vidimo da je]OAQ = t , te je ctg t = d(A,Q)
d(O,Q) , odnosno
x = d(A,Q) = 2ctg t
Odredimo zatim i d(A,B). Iz d(A,B) · d(O,A) = d2(A,Q) dobimao da jed(A,B) = d2(A,Q)
d(O,A) = d2(A,Q)√d2(O,Q)+d2(A,Q)
= 4ctg2t√4+4ctg2t
= 2 cos2 tsin t . Dakle,
y = 2− 2cos2 tsin t
sin t = 2(1− cos2 t) = 2 sin2 t
Primetimo, s obzirom da prava p(O,A) sece pravu y = 2, dobijamo dat ∈ (0, π)
Milica Žigic (DMI, PMF, UNS 2019) Analiticka geometrija predavanje 5 11 / 14

Primer 1, kriva veštice AnjeziOdredimo prvo d(A,Q). Iz pravouglog trougla 4OAQ vidimo da je]OAQ = t , te je ctg t = d(A,Q)
d(O,Q) , odnosno
x = d(A,Q) = 2ctg t
Odredimo zatim i d(A,B). Iz d(A,B) · d(O,A) = d2(A,Q) dobimao da jed(A,B) = d2(A,Q)
d(O,A) = d2(A,Q)√d2(O,Q)+d2(A,Q)
= 4ctg2t√4+4ctg2t
= 2 cos2 tsin t . Dakle,
y = 2− 2cos2 tsin t
sin t = 2(1− cos2 t) = 2 sin2 t
Primetimo, s obzirom da prava p(O,A) sece pravu y = 2, dobijamo dat ∈ (0, π)
Milica Žigic (DMI, PMF, UNS 2019) Analiticka geometrija predavanje 5 11 / 14

Primer 1, kriva veštice AnjeziOdredimo prvo d(A,Q). Iz pravouglog trougla 4OAQ vidimo da je]OAQ = t , te je ctg t = d(A,Q)
d(O,Q) , odnosno
x = d(A,Q) = 2ctg t
Odredimo zatim i d(A,B). Iz d(A,B) · d(O,A) = d2(A,Q) dobimao da jed(A,B) = d2(A,Q)
d(O,A) = d2(A,Q)√d2(O,Q)+d2(A,Q)
= 4ctg2t√4+4ctg2t
= 2 cos2 tsin t . Dakle,
y = 2− 2cos2 tsin t
sin t = 2(1− cos2 t) = 2 sin2 t
Primetimo, s obzirom da prava p(O,A) sece pravu y = 2, dobijamo dat ∈ (0, π)
Milica Žigic (DMI, PMF, UNS 2019) Analiticka geometrija predavanje 5 11 / 14

Primer 1, kriva veštice Anjezi
Konacno, parametrizacija krive veštice Anjezi (na crtežu zeleno) je data sa
x = 2ctg t , y = 2 sin2 t , t ∈ (0, π)
Milica Žigic (DMI, PMF, UNS 2019) Analiticka geometrija predavanje 5 12 / 14

Primer 2, involuta kružniceAko zicu namotanu oko kalema (kružnice) pustimo da se odmota, njen kraj ceprilikom odmotavanja opisivati involutu kružnice u ravni (ovde se zanemarujedebljina zice). Neka je kalem kružnica x2 + y2 = 1, a kraj zice neka je tackaP(x , y) koja je u pocetnom momentu, dok je još žica namotana P0(1,0). Priodmotavanju žica je uvek tangentna na kružnicu u tacki žice Q koja poslednjajoš uvek dodiruje kružnicu. Neka je sa t obeležen ugao koji gradi duž OQ sapozitivnim delom x−ose. Odrediti parametarske jednacine involute kružniceizražavajuci koordinate tacke P(x , y) u zavisnosti od t , t ≥ 0.
Primetimo:važi Q(cos t , sin t), t ≥ 0zatim, za tacku P(x , y) važiP(cos t + x ′, sin t − y ′) gde jex ′ = d(P,Q) cosφ, y ′ = d(P,Q) sinφ
d(P,Q) odgovara dužini kružnog lukaP0Q nad uglom t , odnosnod(P,Q) = t
2π2π = tna kraju, važi φ = π/2− t
Milica Žigic (DMI, PMF, UNS 2019) Analiticka geometrija predavanje 5 13 / 14

Primer 2, involuta kružniceAko zicu namotanu oko kalema (kružnice) pustimo da se odmota, njen kraj ceprilikom odmotavanja opisivati involutu kružnice u ravni (ovde se zanemarujedebljina zice). Neka je kalem kružnica x2 + y2 = 1, a kraj zice neka je tackaP(x , y) koja je u pocetnom momentu, dok je još žica namotana P0(1,0). Priodmotavanju žica je uvek tangentna na kružnicu u tacki žice Q koja poslednjajoš uvek dodiruje kružnicu. Neka je sa t obeležen ugao koji gradi duž OQ sapozitivnim delom x−ose. Odrediti parametarske jednacine involute kružniceizražavajuci koordinate tacke P(x , y) u zavisnosti od t , t ≥ 0.
Primetimo:važi Q(cos t , sin t), t ≥ 0zatim, za tacku P(x , y) važiP(cos t + x ′, sin t − y ′) gde jex ′ = d(P,Q) cosφ, y ′ = d(P,Q) sinφ
d(P,Q) odgovara dužini kružnog lukaP0Q nad uglom t , odnosnod(P,Q) = t
2π2π = tna kraju, važi φ = π/2− t
Milica Žigic (DMI, PMF, UNS 2019) Analiticka geometrija predavanje 5 13 / 14

Primer 2, involuta kružniceAko zicu namotanu oko kalema (kružnice) pustimo da se odmota, njen kraj ceprilikom odmotavanja opisivati involutu kružnice u ravni (ovde se zanemarujedebljina zice). Neka je kalem kružnica x2 + y2 = 1, a kraj zice neka je tackaP(x , y) koja je u pocetnom momentu, dok je još žica namotana P0(1,0). Priodmotavanju žica je uvek tangentna na kružnicu u tacki žice Q koja poslednjajoš uvek dodiruje kružnicu. Neka je sa t obeležen ugao koji gradi duž OQ sapozitivnim delom x−ose. Odrediti parametarske jednacine involute kružniceizražavajuci koordinate tacke P(x , y) u zavisnosti od t , t ≥ 0.
Primetimo:važi Q(cos t , sin t), t ≥ 0zatim, za tacku P(x , y) važiP(cos t + x ′, sin t − y ′) gde jex ′ = d(P,Q) cosφ, y ′ = d(P,Q) sinφ
d(P,Q) odgovara dužini kružnog lukaP0Q nad uglom t , odnosnod(P,Q) = t
2π2π = tna kraju, važi φ = π/2− t
Milica Žigic (DMI, PMF, UNS 2019) Analiticka geometrija predavanje 5 13 / 14

Primer 2, involuta kružniceAko zicu namotanu oko kalema (kružnice) pustimo da se odmota, njen kraj ceprilikom odmotavanja opisivati involutu kružnice u ravni (ovde se zanemarujedebljina zice). Neka je kalem kružnica x2 + y2 = 1, a kraj zice neka je tackaP(x , y) koja je u pocetnom momentu, dok je još žica namotana P0(1,0). Priodmotavanju žica je uvek tangentna na kružnicu u tacki žice Q koja poslednjajoš uvek dodiruje kružnicu. Neka je sa t obeležen ugao koji gradi duž OQ sapozitivnim delom x−ose. Odrediti parametarske jednacine involute kružniceizražavajuci koordinate tacke P(x , y) u zavisnosti od t , t ≥ 0.
Primetimo:važi Q(cos t , sin t), t ≥ 0zatim, za tacku P(x , y) važiP(cos t + x ′, sin t − y ′) gde jex ′ = d(P,Q) cosφ, y ′ = d(P,Q) sinφ
d(P,Q) odgovara dužini kružnog lukaP0Q nad uglom t , odnosnod(P,Q) = t
2π2π = tna kraju, važi φ = π/2− t
Milica Žigic (DMI, PMF, UNS 2019) Analiticka geometrija predavanje 5 13 / 14

Primer 2, involuta kružniceAko zicu namotanu oko kalema (kružnice) pustimo da se odmota, njen kraj ceprilikom odmotavanja opisivati involutu kružnice u ravni (ovde se zanemarujedebljina zice). Neka je kalem kružnica x2 + y2 = 1, a kraj zice neka je tackaP(x , y) koja je u pocetnom momentu, dok je još žica namotana P0(1,0). Priodmotavanju žica je uvek tangentna na kružnicu u tacki žice Q koja poslednjajoš uvek dodiruje kružnicu. Neka je sa t obeležen ugao koji gradi duž OQ sapozitivnim delom x−ose. Odrediti parametarske jednacine involute kružniceizražavajuci koordinate tacke P(x , y) u zavisnosti od t , t ≥ 0.
Primetimo:važi Q(cos t , sin t), t ≥ 0zatim, za tacku P(x , y) važiP(cos t + x ′, sin t − y ′) gde jex ′ = d(P,Q) cosφ, y ′ = d(P,Q) sinφ
d(P,Q) odgovara dužini kružnog lukaP0Q nad uglom t , odnosnod(P,Q) = t
2π2π = tna kraju, važi φ = π/2− t
Milica Žigic (DMI, PMF, UNS 2019) Analiticka geometrija predavanje 5 13 / 14

Primer 2, involuta kružniceAko zicu namotanu oko kalema (kružnice) pustimo da se odmota, njen kraj ceprilikom odmotavanja opisivati involutu kružnice u ravni (ovde se zanemarujedebljina zice). Neka je kalem kružnica x2 + y2 = 1, a kraj zice neka je tackaP(x , y) koja je u pocetnom momentu, dok je još žica namotana P0(1,0). Priodmotavanju žica je uvek tangentna na kružnicu u tacki žice Q koja poslednjajoš uvek dodiruje kružnicu. Neka je sa t obeležen ugao koji gradi duž OQ sapozitivnim delom x−ose. Odrediti parametarske jednacine involute kružniceizražavajuci koordinate tacke P(x , y) u zavisnosti od t , t ≥ 0.
Primetimo:važi Q(cos t , sin t), t ≥ 0zatim, za tacku P(x , y) važiP(cos t + x ′, sin t − y ′) gde jex ′ = d(P,Q) cosφ, y ′ = d(P,Q) sinφ
d(P,Q) odgovara dužini kružnog lukaP0Q nad uglom t , odnosnod(P,Q) = t
2π2π = tna kraju, važi φ = π/2− t
Milica Žigic (DMI, PMF, UNS 2019) Analiticka geometrija predavanje 5 13 / 14

Primer 2, involuta kružniceAko zicu namotanu oko kalema (kružnice) pustimo da se odmota, njen kraj ceprilikom odmotavanja opisivati involutu kružnice u ravni (ovde se zanemarujedebljina zice). Neka je kalem kružnica x2 + y2 = 1, a kraj zice neka je tackaP(x , y) koja je u pocetnom momentu, dok je još žica namotana P0(1,0). Priodmotavanju žica je uvek tangentna na kružnicu u tacki žice Q koja poslednjajoš uvek dodiruje kružnicu. Neka je sa t obeležen ugao koji gradi duž OQ sapozitivnim delom x−ose. Odrediti parametarske jednacine involute kružniceizražavajuci koordinate tacke P(x , y) u zavisnosti od t , t ≥ 0.
Primetimo:važi Q(cos t , sin t), t ≥ 0zatim, za tacku P(x , y) važiP(cos t + x ′, sin t − y ′) gde jex ′ = d(P,Q) cosφ, y ′ = d(P,Q) sinφ
d(P,Q) odgovara dužini kružnog lukaP0Q nad uglom t , odnosnod(P,Q) = t
2π2π = tna kraju, važi φ = π/2− t
Milica Žigic (DMI, PMF, UNS 2019) Analiticka geometrija predavanje 5 13 / 14

Primer 2, involuta kružnice
Dakle, za tacku P važi
P(cos t + t cos(π/2− t), sin t − t sin(π/2− t)), t ≥ 0.
Konacno, parametrizacija involute kružnice (na crtežu crveno) je data sa
x = cos t + t sin t , y = sin t − t cos t , t ≥ 0
Milica Žigic (DMI, PMF, UNS 2019) Analiticka geometrija predavanje 5 14 / 14

Primer 2, involuta kružniceDakle, za tacku P važi
P(cos t + t cos(π/2− t), sin t − t sin(π/2− t)), t ≥ 0.
Konacno, parametrizacija involute kružnice (na crtežu crveno) je data sa
x = cos t + t sin t , y = sin t − t cos t , t ≥ 0
Milica Žigic (DMI, PMF, UNS 2019) Analiticka geometrija predavanje 5 14 / 14