
ANALISI STATICA 5 - mionome.com Equilibratore SF-260.pdf · ANALISI STATICA E DINAMICA DELL’...
32
ANALISI STATICA E DINAMICA DELL’ EQUILIBRATORE DEL VELIVOLO Lorenzo Cartabia n° matr. 642207 Luca Parazzoli n° matr. 642272
Transcript of ANALISI STATICA 5 - mionome.com Equilibratore SF-260.pdf · ANALISI STATICA E DINAMICA DELL’...

ANALISI STATICA E DINAMICA DELL’ EQUILIBRATORE
DEL VELIVOLO
Lorenzo Cartabia n° matr. 642207 Luca Parazzoli n° matr. 642272
ANALISI STATICA E DINAMICA DELL’ EQUILIBRATORE DEL VELIVOLO SF-260
2
Indice 1 - Specifiche 2 - Strumenti di calcolo utilizzati 3 - Caratteristiche geometrico strutturali 4 - Modello FEM
4.1 - Elementi di NASTRAN 4.2.1 - Pannellatura posteriore 4.2.2 - Pannellatura anteriore 4.2.3 - Longheroni 4.2.4 - Centine 4.2.5 - Tubo di torsione 4.2.4 - Cerniere 4.2.5 - Capottine
4.3 - Considerazioni 4.4 - Settaggio dei parametri
5 - Carichi 5.1 - Manovra 5.2 - Raffica 6 - Certificazione 6.1 - Flessione 6.1.1 - Semiguscio 6.1.2 - FEM 6.1.3 - Confronto 6.2 - Torsione 6.2.1 - Semiguscio 6.2.2 - FEM 6.2.3 - Confronto 7 - Risultati FEA
7.1 - Verifica “free-free” 7.2 - Analisi statica
7.2.1 - Manovra 7.2.2 - Raffica 7.2.3 - Considerazioni
7.3 - Analisi dinamica 7.3.1 - Analisi modale
8 - Considerazioni 8.1 - Verifica dei parametri 8.2 - Necessità della modellazione della cava
9 - Conclusioni

ANALISI STATICA E DINAMICA DELL’ EQUILIBRATORE DEL VELIVOLO SF-260
3
1 - Specifiche L’obiettivo dell’analisi è la determinazione delle deformazioni dell’equilibratore del velivolo SF-260 conseguenti alla presenza su di esso di due differenti condizioni di carico: una di manovra ed una di raffica. E’ richiesta, inoltre, la determinazione dei primi venti modi propri di vibrare della struttura.
2 - Strumenti di calcolo utilizzati Per la fase di pre-post processing, si è fatto uso del programma FEMAP 8.1, mentre, per la fase di calcolo si è ricorso a MSC NASTRAN 2001 .
3 - Caratteristiche geometrico strutturali L’equilibratore è realizzato secondo una tipologia classica a monolongherone continuo con 6 centine per semiala. In una delle due è ricavato l’alloggiamento per l’aletta di trim, che non sarà considerata durante l’analisi agli elementi finiti. Il bordo d’attacco è sagomato secondo un arco di cerchio, mentre il dorso ed il ventre sono rettilinei; il bordo d’uscita è rinforzato tramite una bandella a sezione rettangolare. Le solette del longherone e delle centine sono ottenute per imbutitura dei pannelli costituenti le rispettive anime. Queste ultime sono alleggerite tramite foratura, ed irrigidite, tramite ulteriori imbutiture, fuori dal piano, per motivi di instabilità. Un semitubo, esteso fino alla seconda centina e vincolato al longherone, trasmette le sollecitazioni torcenti tra il comando e l’equilibratore. Alle estremità in apertura, sono presenti due elementi non strutturali in fibra di vetro (capottine), aventi solo scopo aerodinamico. Tre cerniere vincolano l’equilibratore allo stabilizzatore; esse sono fissate al longherone attraverso delle piastre di rinforzo, imbullonate all’anima, in 25CrMo4. Il resto della struttura è interamente realizzato in ALCLAD 2024 T42. Il peso complessivo dell’equilibratore è 4,850 kg , comprendente anche i pesi delle cerniere ( 211g la centrale, 24g le laterali), le capottine ( 176g ) e della verniciatura (1 e-7 kg/mm2 sulle superfici esterne; 6,8 e-8 kg/mm2 sulle superfici interne).
ANALISI STATICA E DINAMICA DELL’ EQUILIBRATORE DEL VELIVOLO SF-260
4
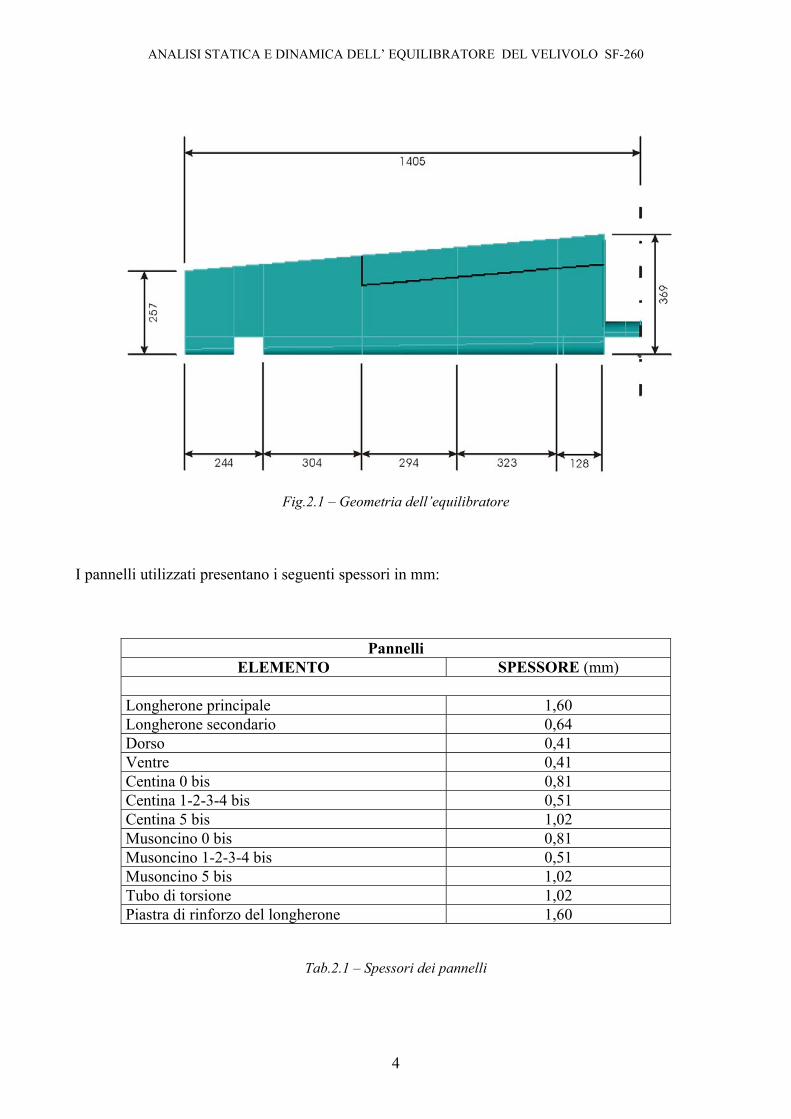
Fig.2.1 – Geometria dell’equilibratore I pannelli utilizzati presentano i seguenti spessori in mm:
Pannelli ELEMENTO SPESSORE (mm)
Longherone principale 1,60 Longherone secondario 0,64 Dorso 0,41 Ventre 0,41 Centina 0 bis 0,81 Centina 1-2-3-4 bis 0,51 Centina 5 bis 1,02 Musoncino 0 bis 0,81 Musoncino 1-2-3-4 bis 0,51 Musoncino 5 bis 1,02 Tubo di torsione 1,02 Piastra di rinforzo del longherone 1,60
Tab.2.1 – Spessori dei pannelli

ANALISI STATICA E DINAMICA DELL’ EQUILIBRATORE DEL VELIVOLO SF-260
5
Fig.2.2 – Esploso dell’equilibratore
4 - Modello FEM Per l’analisi agli elementi finiti si è utilizzato un modello notevolmente semplificato rispetto alla realtà, ed avente una discretizzazione spaziale bassa. Questa scelta è stata possibile in quanto non è richiesto lo studio degli sforzi puntuali all’interno dell’equilibratore, ma solo della sua deformata globale e dei suoi modi propri di vibrare. Si è posta, invece, attenzione alla dislocazione delle masse per non alterare i valori delle frequenze di risonanza. Si è ottenuto così un modello con le seguenti caratteristiche:
M O D E L S U M M A R Y
NUMBER OF GRID POINTS = 1230
NUMBER OF CBEAM ELEMENTS = 465 NUMBER OF CONM2 ELEMENTS = 5 NUMBER OF CQUAD4 ELEMENTS = 1284 NUMBER OF CTRIA3 ELEMENTS = 71 NUMBER OF PLOTEL ELEMENTS = 50
NUMBER OF RBE2 ELEMENTS = 3 NUMBER OF RBE3 ELEMENTS = 14

ANALISI STATICA E DINAMICA DELL’ EQUILIBRATORE DEL VELIVOLO SF-260
6
MASS X-C.G. Y-C.G. Z-C.G.
4.791782 -16,07 -3.412E-17 102,8
MOMENTI PRINCIPALI DI INERZIA (Kgmm2)
*** *** * 3.401939E+04 * * 3.463529E+06 * * 3.433109E+06 * *** ***
4.1 - Elementi di NASTRAN Sono state utilizzate le seguenti tipologie di elementi:
- CQUAD4 : sono degli elementi di piastra quadrilateri descritti secondo il modello di Mindlin, utilizzati per la rappresentazione dei pannelli di rivestimento, delle anime del longherone e delle centine, e del tubo d torsione;
- CTRIA3 : sono degli elementi analoghi ai precedenti ma triangolari, utilizzati solo nella modellazione delle centine;
- CBEAM : sono degli elementi di trave descritti secondo il modello di Timoshenko,
utilizzati per la rappresentazione delle solette del longherone e delle centine; - RBE2 : definisce un corpo rigido i cui gradi di libertà sono specificati rispetto ad un
singolo nodo, e i suoi gradi di vincolo sono specificati rispetto ad un arbitrario numero di nodi. Si è fatto ricorso ad elementi di questo tipo per la modellazione delle cerniere e delle relative piastre;
- RBE3 : è un elemento di interpolazione avente lo scopo di ridistribuire forze e
momenti in una maniera staticamente equivalente, senza incidere sulle caratteristiche di rigidezza del modello. Si è fatto ricorso ad elementi di questo tipo per l’introduzione dei carichi esterni sulle centine;
- CONM2 : è un elemento puntiforme non strutturale che possiede una massa propria.
Si è fatto ricorso ad elementi di questo tipo per la riduzione delle capottine a semplici masse concentrate e per introdurre le masse delle cerniere.

ANALISI STATICA E DINAMICA DELL’ EQUILIBRATORE DEL VELIVOLO SF-260
7
4.2 - Elementi dello stabilizzatore Si mostra come sono state modellate le singole parti dell’equilibratore: 4.2.1 - Pannellatura posteriore Si sono utilizzati solo elementi di piastra, 5 lungo la corda e 6 per ogni passo di centina. Si è posta, però, attenzione affinché le dimensioni degli elementi diminuiscano lungo gli intuibili gradienti di sforzi: ne è nata una meshatura ad infittimento crescente dal bordo d’uscita al longherone, e dall’estremità alare alla mezzeria. Lungo questa direzione, l’infittimento non è comunque monotono; si è, infatti, tenuto conto dei carichi introdotti in maniera non uniforme dalle centine. Si hanno, dunque, elementi di piastra più piccoli a ridosso delle centine e più grandi a metà del passo. Analogo ragionamento è stato fatto per i carichi dovuti alle cerniere. In particolare, gli elementi adiacenti alle centine ed alle cerniere hanno una lunghezza pari a metà dello spessore della sezione dell’equilibratore nel punto, che rappresenta circa 1/3 della lunghezza di diffusione degli sforzi. In questa maniera l’andamento degli effetti di estremità è sufficientemente approssimato.
Fig.4.1 – Pannellatura posteriore
4.2.2 - Pannellatura anteriore Si sono utilizzati solo elementi di piastra, con la stessa discretizzazione in apertura usata per la pannellatura posteriore. Data la ridotta sollecitazione presente in questa zona, per modellare il bordo d’attacco sono parsi sufficienti 2 o 3 elementi in corda a seconda che ci si trovi in estremità (zona meno sollecitata) o in mezzeria (zona maggiormente sollecitata) .

ANALISI STATICA E DINAMICA DELL’ EQUILIBRATORE DEL VELIVOLO SF-260
8
Fig.4.2 – Pannellatura anteriore
4.2.3 - Longherone (principale e secondario) L’anima è realizzata tramite elementi di piastra (due in altezza, mentre in apertura si segue l’andamento presente nella pannellatura). Le solette sono state modellate tramite elementi di trave; mentre i rinforzi, in corrispondenza delle cerniere, sono stati ottenuti tramite un semplice ispessimento degli elementi già presenti. A differenza di quanto è stato fatto in altre parti, si è preferito mantenere i fori di alleggerimento nell’anima, in quanto si trovano in una zona molto sollecitata del longherone, ed il trascurarli, avrebbe potuto portare a risultati eccessivamente approssimati.
Fig.4.3 – Longheroni

ANALISI STATICA E DINAMICA DELL’ EQUILIBRATORE DEL VELIVOLO SF-260
9
4.2.4 - Centine Sono state modellate con piastre, relativamente all’anima, e con travi, relativamente alle solette. Si sono trascurati i fori di alleggerimento, in quanto la zona non è critica, ai fini dell’analisi richiesta; per lo stesso motivo si è evitato inoltre di interrompere le centine poco prima del bordo d’uscita, come accade nella realtà. Se si fosse fatto, si avrebbero avuti degli elementi inutilmente fitti sulla pannellatura, in quanto quest’ultimi si appoggiano sugli stessi nodi presenti sui contorni delle centine. Con le approssimazioni effettuate, però, si ha un eccesso di massa. Si è risolto il problema, diminuendo opportunamente la densità del materiale, in corrispondenza degli elementi di piastra delle centine.
Fig.4.4 – Centine

ANALISI STATICA E DINAMICA DELL’ EQUILIBRATORE DEL VELIVOLO SF-260
10
4.2.5 - Tubo di torsione Si tratta di uno degli elementi più stressati dell’equilibratore; è parso dunque opportuno modellarlo con una risoluzione maggiore delle altri parti. Si è ottenuta una meshatura da 24x6 elementi (tutti plate).
Fig.4.5 – Tubo di torsione 4.2.6 - Cerniere Come già detto, sono modellate con elementi RBE2, per quanto riguarda il cinematismo, e con elementi CONM2, per quanto riguarda la massa. Si noti che del gruppo cerniera fanno parte anche le piastre collegate al longherone, atte a distribuirvi su il carico introdotto.
Fig.4.6 – Cerniera

ANALISI STATICA E DINAMICA DELL’ EQUILIBRATORE DEL VELIVOLO SF-260
11
4.2.7 – Capottine Siccome le capottine non hanno uno scopo strutturale, ma prettamente aerodinamico, si è preferito modellarle con delle semplici masse concentrate, poste nel loro baricentro.
Fig.4.7 – Modellazione della capottina
4.3 - Considerazioni
- Sono stati trascurati i raccordi e le chiodature, dal momento che il loro contributo agli sforzi è solo locale, mentre quello alle masse è trascurabile.
- Sono state trascurate le imbutiture perché hanno lo scopo di resistere agli effetti di
instabilità, che nell’analisi effettuata non viene considerata in quanto di tipo lineare.
- Sono stati utilizzati elementi di piastra anziché quelli di membrana (MEMBRANE), sebbene non siano caricati fuori dalla loro giacitura, per evitare labilità nella struttura che porterebbero ad instabilità numeriche. Si sarebbe potuto altrimenti introdurre centine fittizie in corrispondenza di ogni nodo della pannellatura, ma sarebbe stata una complicazione inutile.
- Sono stati utilizzati elementi di trave anziché quelli di asta (ROD) per evitare che
elementi concorrenti in uno stesso nodo presentino differenti gradi di libertà (asta = 1; piastra = 6).

ANALISI STATICA E DINAMICA DELL’ EQUILIBRATORE DEL VELIVOLO SF-260
12
- Sono stati utilizzati degli elementi beam anziché i più semplici elementi bar in quanto questi, seppur analoghi, non possiedono momento d’inerzia rispetto all’asse x proprio.
- Sono stati trascurati 14 “messaggi di pericolo” da parte di NASTRAN, riferentesi ad
altrettanti eccessi di “taper ratio” in elementi CQUAD4 del modello. Il valore massimo utilizzato nel modello è 0,59, mentre il valore massimo consigliabile è 0,50. Siccome, tuttavia, NASTRAN accetta valori di rastremazione fino a 10, il modello è parso egualmente accettabile.
4.4 - Settaggio dei parametri - BENDING STIFFNESS: è stato posto pari a 3 nelle analisi statiche, per evitare
instabilità numeriche dovute al processo di ingrandimento degli spostamenti. Siccome il bending stiffness provoca un vero e proprio irrigidimento flessionale dei pannelli, è stato poi necessario verificare che, per il valore usato, non vi fossero state variazioni eccessive nei risultati dell’analisi statica. Nel caso di quella modale, è stato lasciato il valore di default pari a 1;
- K6ROT: è stato posto pari a 1, per eliminare le labilità dovute agli
elementi plate. Secondo la modellazione a piastra di Mindlin, infatti, essi non possiedono rigidezza rispetto all’asse perpendicolare al piano medio, e se gli omologhi vertici superiori ed inferiori non sono allineati, possono nascere dei modi spuri. K6ROT ha lo scopo di introdurre la rigidezza sufficiente ad eliminare tale possibilità, e lo si è lasciato nullo solo nel caso della verifica “free-free”;
- WTMASS: è stato posto pari a 0,001. Tale parametro è risultato
necessario, nell’analisi modale, per correggere un errore di dimensioni dovuto all’utilizzo del millimetro quale unità di misura della lunghezza e del kg per la massa.
5 - Carichi Siccome la tipologia strutturale dell’equilibratore è quella del semiguscio, i carichi agenti su di esso sono stati discretizzati e ridotti a forze concentrate applicate in corrispondenza delle centine tramite elementi RBE3 aventi fattore interpolatore pari a 1. La discretizzazione è stata effettuata attribuendo a ciascuna centina il carico compreso tra il proprio semipasso sinistro ed il proprio semipasso destro. Inoltre, per semplificare il modello, ci si è ricondotti a delle condizioni di carico equivalenti a quelle forniteci per la manovra e per la raffica, nelle quali il momento torcente è nullo. Ciò è stato possibile semplicemente ponendo il punto di applicazione dei carichi a 108 mm in corda, dall’asse di cerniera, verso il bordo d’uscita. Nei successivi grafici verranno riportate per completezza anche le azioni dovute alle cerniere, sebbene, nell’analisi, esse non vengano utilizzate.

ANALISI STATICA E DINAMICA DELL’ EQUILIBRATORE DEL VELIVOLO SF-260
13
Si noti, infine, che i punti di applicazione delle forze sono stati posti tutti alla quota y = 100mm. La ragione è solo di tipo visivo, effettuata per distinguere gli elementi RBE3 dal resto della struttura. Una forza può, d’altronde, essere liberamente spostata lungo la propria retta di applicazione.
Fig.5.1 – Introduzione dei carichi
5.1 - Manovra L’andamento dei carichi in fase di manovra risulta essere:
Taglio dovuto alla manovra
-800
-600
-400
-200
0
200
400
600
800
0 200 400 600 800 1000 1200 1400 1600
Posizione in apertura (mm)
Tagl
io (N
)
Graf.5.1 – Discretizzazione del carico da manovra

ANALISI STATICA E DINAMICA DELL’ EQUILIBRATORE DEL VELIVOLO SF-260
14
Centina 0 Centina 1 Centina 2 Centina 3 Centina 4 Centina 5Taglio introdotto (N) 192,565 235,351 313,105 314,149 285,969 224,461
Tab.5.1 – Discretizzazione del carico da manovra
5.2 - Raffica L’andamento dei carichi dovuti alla raffica risulta essere:
Taglio dovuto alla raffica
-160
-120
-80
-40
0
40
80
120
160
200
0 200 400 600 800 1000 1200 1400 1600
Posizione in apertura (mm)
Tagl
io (N
)
Graf.5.2 – Discretizzazione del carico da raffica
Centina 0 Centina 1 Centina 2 Centina 3 Centina 4 Centina 5Taglio introdotto (N) 39,556 48,352 64,334 64,559 58,777 46,094
Tab.5.2 – Discretizzazione del carico da raffica
6 - Certificazione Prima di effettuare l’analisi ad elementi finiti, è opportuno verificare che il modello ottenuto calcoli correttamente sia uno stato di flessione sia uno di torsione arbitrari costanti. Il controllo viene effettuato tramite un’analisi a semiguscio nella quale il semi-stabilizzatore viene schematizzato in tre tronconi rastremati:

ANALISI STATICA E DINAMICA DELL’ EQUILIBRATORE DEL VELIVOLO SF-260
15
- il primo si estende da mezzeria, fino ad una quota x = 112 mm in apertura, ed è
caratterizzato da una sezione monocella;
- il secondo si estende da una quota x = 112 mm in apertura, fino ad x = 240, ed è caratterizzato da una sezione a tre celle;
- il terzo si estende da una quota x = 240 mm in apertura, fino ad x = 1405, ed è caratterizzato da una sezione a due celle;
6.1 - Flessione 6.1.1 - Semiguscio Si è scelto di caricare il semi-equilibratore in estremità in maniera unitaria: T = 1N. La prima zona è interessata solo dalla presenza del longherone e del tubo di torsione. Per schematizzare questi elementi sono stati utilizzati 6 correnti dislocati come mostrato in figura:
Fig.6.1 – Modello a semiguscio della sezione del 1° troncone Le aree dei correnti variano in apertura secondo le seguenti leggi:
A1 = 70,448 - 0,0838 z [mm2] A2 = 35,136 - 0,0755 z [mm2] A3 = 35,136 - 0,0755 z [mm2] A4 = 35,136 - 0,0755 z [mm2] A5 = 70,448 - 0,0838 z [mm2] A6 = 62,882 - 0,0166 z [mm2]
Da questi valori e dalla geometria della sezione, è stato possibile risalire al valore del momento d’inerzia rispetto all’asse x:
J1x = 271881,3 - 375,629 z + 0,015 z 2 – 2,197*10-5 z 3 [mm4]

ANALISI STATICA E DINAMICA DELL’ EQUILIBRATORE DEL VELIVOLO SF-260
16
La seconda zona è interessata dalla presenza del longherone, del tubo di torsione e del rivestimento. Per schematizzare questi elementi sono stati utilizzati 12 correnti dislocati come mostrato in figura:
Fig.6.2 – Modello a semiguscio della sezione del 2° troncone
Le aree dei correnti variano in apertura secondo le seguenti leggi:
A1 = 63,364 – 0,0399 z [mm2] A2 = 63,364 – 0,0399 z [mm2] A3 = 118,515 – 0,1399 z [mm2] A4 = 21,780 – 0,0157 z [mm2] A5 = 21,780 – 0,0157 z [mm2] A6 = 21,780 – 0,0157 z [mm2] A7 = 118,515 – 0,0157 z [mm2] A8 = 63,364 – 0,0399 z [mm2] A9 = 59,904 – 0,0535 z [mm2] A10 = 33,021 – 0,0305 z [mm2] A11 = 33,021 – 0,0305 z [mm2] A12 = 33,021 – 0,0305 z [mm2]
Da questi valori e dalla geometria della sezione, è stato possibile risalire al valore del momento d’inerzia rispetto all’asse x:
J2x = 453487,63 – 484,468 z + 1,3548 z 2 – 0,00129 z 3 [mm4] La terza zona è interessata dalla presenza del longherone e del rivestimento. Per schematizzare questi elementi sono stati utilizzati 9 correnti dislocati come mostrato in figura:
ANALISI STATICA E DINAMICA DELL’ EQUILIBRATORE DEL VELIVOLO SF-260
17
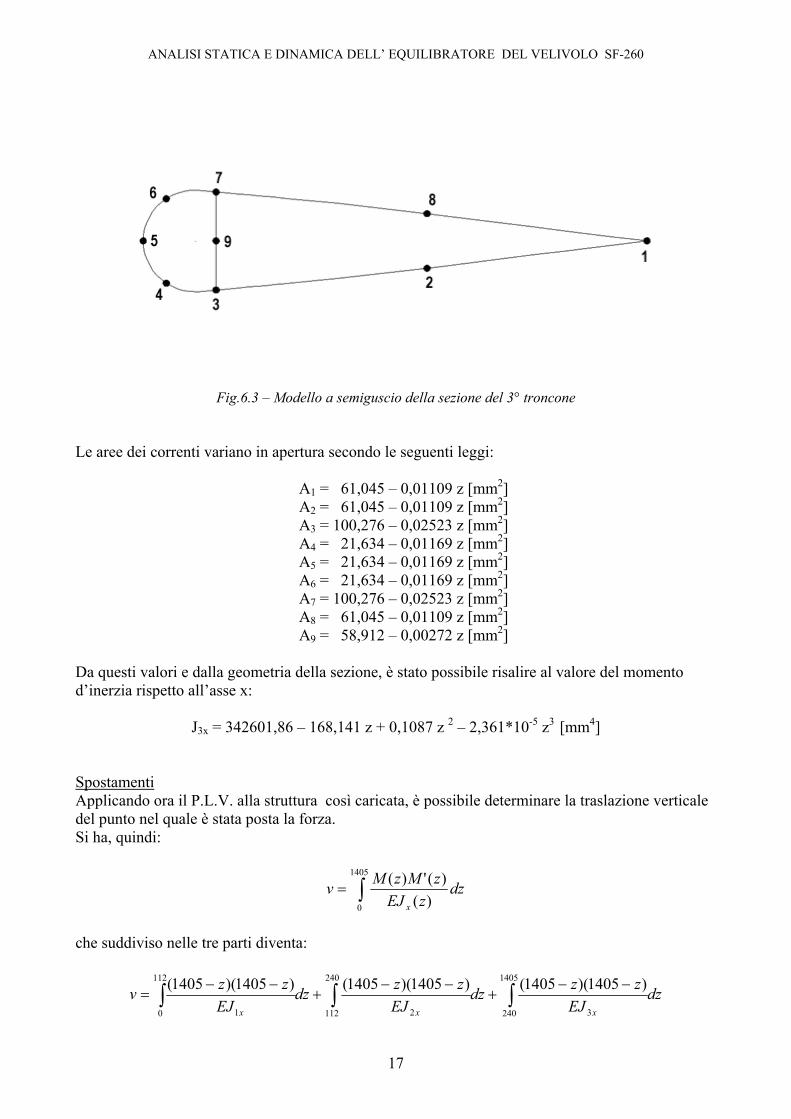
Fig.6.3 – Modello a semiguscio della sezione del 3° troncone
Le aree dei correnti variano in apertura secondo le seguenti leggi:
A1 = 61,045 – 0,01109 z [mm2] A2 = 61,045 – 0,01109 z [mm2] A3 = 100,276 – 0,02523 z [mm2] A4 = 21,634 – 0,01169 z [mm2] A5 = 21,634 – 0,01169 z [mm2] A6 = 21,634 – 0,01169 z [mm2] A7 = 100,276 – 0,02523 z [mm2] A8 = 61,045 – 0,01109 z [mm2] A9 = 58,912 – 0,00272 z [mm2]
Da questi valori e dalla geometria della sezione, è stato possibile risalire al valore del momento d’inerzia rispetto all’asse x:
J3x = 342601,86 – 168,141 z + 0,1087 z 2 – 2,361*10-5 z3 [mm4] Spostamenti Applicando ora il P.L.V. alla struttura così caricata, è possibile determinare la traslazione verticale del punto nel quale è stata posta la forza. Si ha, quindi:
∫=1405
0 )()(')( dz
zEJzMzMv
x
che suddiviso nelle tre parti diventa:
dzEJ
zzdzEJ
zzdzEJ
zzvxxx
∫∫∫−−
+−−
+−−
=1405
240 3
240
112 2
112
0 1
)1405)(1405()1405)(1405()1405)(1405(

ANALISI STATICA E DINAMICA DELL’ EQUILIBRATORE DEL VELIVOLO SF-260
18
Lo spostamento calcolato con questo metodo è risultato essere:
v = 0,043 mm 6.1.2 - FEM Lo studio del modello ad elementi finiti nella stessa condizione di carico porta al risultato:
v = 0,0613mm 6.1.3 - Confronto La differenza percentuale tra i due valori ottenuti per lo spostamento è data in tabella:
Modello Spostamento (mm) Differenza percentuale Semiguscio 0,043
FEM 0,061 28,3
Tab.6.1 – Confronto degli spostamenti ottenuti
6.2 - Torsione Si è scelto di caricare il semi-equilibratore in estremità in maniera unitaria: M = 1 Nm. 6.2.1 - Semiguscio Analogamente a quanto fatto per la flessione, si considerano separatamente le rotazioni dei tre tronconi in cui è stato suddiviso l’equilibratore, e poi se ne effettua la somma. Primo troncone Si tratta della sezione più semplice da trattare, in quanto costituta da una sola cella. Per il calcolo del flusso di taglio costante nei pannelli è sufficiente imporre l’equilibrio rispetto al momento nel piano della sezione attraverso la seguente formula:
Ω=
2tM
q
Secondo troncone Essendo una sezione pluricella, non è più sufficiente l’equazione di equilibrio, ma si sfruttano anche le equazioni di congruenza tra le celle, imponendo uguali le rotazioni nelle differenti celle. Si avrà per cui:

ANALISI STATICA E DINAMICA DELL’ EQUILIBRATORE DEL VELIVOLO SF-260
19
=
=
=Ω∑=
31
21
12
ϑϑ
ϑϑ&&
&&
t
n
iii Mq
con ϑ& pari a:
∑Ω=
i
ii
k tlq
G21ϑ&
Terzo troncone In questa parte si opera in maniera del tutto analoga a come fatto nella parte precedente. Rotazioni Applicando ora il P.L.V. alla struttura così caricata, è possibile determinare la rotazione della sezione sulla quale è stata posta la coppia. Si ha quindi:
∫= dzz)(ϑϑ & che suddiviso nelle tre parti diventa:
∫∫∫ ++=1405
2403
240
1122
112
01 dzdzdz ϑϑϑϑ &&& = (0,00105+0,003+0,0123)° = 0,01635°
6.2.2 - FEM Lo studio del modello ad elementi finiti nella stessa condizione di carico, ottenuta attraverso due forze uguali e contrarie di valore 31,250 N sui nodi estremi del longherone che producono una coppia pari a 1 Nm ed una rotazione pari a:
=ϑ 0,0223° 6.2.3 - Confronto La differenza percentuale tra i due valori ottenuti per la rotazione è data in tabella:
Modello Rotazione (°) Differenza percentuale Semiguscio 0,01635
FEM 0,0223 26,6
Tab.6.2 – Confronto delle rotazioni ottenute

ANALISI STATICA E DINAMICA DELL’ EQUILIBRATORE DEL VELIVOLO SF-260
20
7 - Risultati FEA
7.1 - Verifica “free-free” La correttezza del modello ad elementi finiti è stata verificata inizialmente tramite un’analisi “free-free”, nella quale si studiano i modi propri di vibrare del modello non vincolato. Si sono ottenuti i seguenti valori:
Modo Frequenza (Hz) Comportamento 1 8,20 E-05 2 6,92 E-05 3 2,92 E-05 4 4,83 E-05 5 6,52 E-05 6 8,92 E-05
Moti rigidi
7 33,3 8 35,7 9 37,1 10 37,2
Moti non rigidi
Tab.7.1 – Modi propri nell’analisi “free-free”
Dalla tabella si evince che non sono presenti labilità: esse sono, infatti, caratterizzate da modi propri prossimi allo zero. I primi sei modi, caratterizzati da frequenze basse, sono, invece, quelli relativi ai moti rigidi della struttura.
7.2 - Analisi statica 7.2.1 - Manovra
Nelle analisi statiche, sia per la manovra che per la raffica, si è scelto, per motivi di costi computazionali, di studiare solo mezza struttura. Ciò è stato possibile, in quanto l’equilibratore presenta una sostanziale simmetria, rispetto alla mezzeria, sia per quanto riguarda la rigidezza ed i vincoli, sia per quanto riguarda i carichi applicati. Sì è analizzata esclusivamente la metà nella quale è stata ricavata la cava per l’aletta di trim, in quanto risulta evidentemente essere la meno resistente delle due. Si è posta attenzione a vincolare il semi-equilibratore con un incastro in mezzeria, per ripristinarne le originarie condizioni al contorno. I risultati ottenuti, in termini di deformazione e sforzi massimi e minimi, sono:
Manovra Spostamento massimo (mm) 6,4412 Sforzo massimo nei pannelli (N/mm2) 111,887 Sforzo massimo a taglio nell’anima del longherone (N/mm2) 31,211 Azione massima assiale nel corrente superiore (N) 833,663 Azione massima assiale nel corrente inferiore (N) -832,990
Tab.7.2 – Deformazioni e sforzi da manovra

ANALISI STATICA E DINAMICA DELL’ EQUILIBRATORE DEL VELIVOLO SF-260
21
Fig.7.1 – Deformata dovuta ai carichi da manovra
Fig.7.2 – Sforzi dovuti ai carichi da manovra
ANALISI STATICA E DINAMICA DELL’ EQUILIBRATORE DEL VELIVOLO SF-260
22
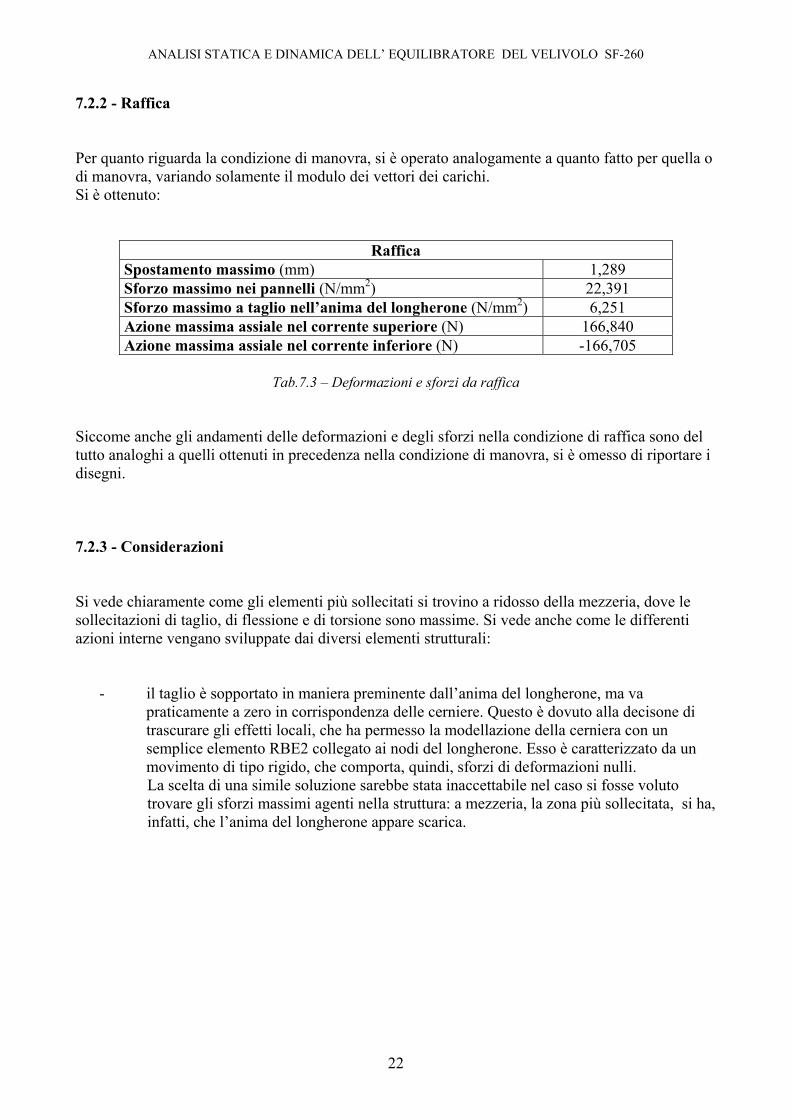
7.2.2 - Raffica Per quanto riguarda la condizione di manovra, si è operato analogamente a quanto fatto per quella o di manovra, variando solamente il modulo dei vettori dei carichi. Si è ottenuto:
Raffica Spostamento massimo (mm) 1,289 Sforzo massimo nei pannelli (N/mm2) 22,391 Sforzo massimo a taglio nell’anima del longherone (N/mm2) 6,251 Azione massima assiale nel corrente superiore (N) 166,840 Azione massima assiale nel corrente inferiore (N) -166,705
Tab.7.3 – Deformazioni e sforzi da raffica
Siccome anche gli andamenti delle deformazioni e degli sforzi nella condizione di raffica sono del tutto analoghi a quelli ottenuti in precedenza nella condizione di manovra, si è omesso di riportare i disegni. 7.2.3 - Considerazioni Si vede chiaramente come gli elementi più sollecitati si trovino a ridosso della mezzeria, dove le sollecitazioni di taglio, di flessione e di torsione sono massime. Si vede anche come le differenti azioni interne vengano sviluppate dai diversi elementi strutturali:
- il taglio è sopportato in maniera preminente dall’anima del longherone, ma va praticamente a zero in corrispondenza delle cerniere. Questo è dovuto alla decisone di trascurare gli effetti locali, che ha permesso la modellazione della cerniera con un semplice elemento RBE2 collegato ai nodi del longherone. Esso è caratterizzato da un movimento di tipo rigido, che comporta, quindi, sforzi di deformazioni nulli. La scelta di una simile soluzione sarebbe stata inaccettabile nel caso si fosse voluto trovare gli sforzi massimi agenti nella struttura: a mezzeria, la zona più sollecitata, si ha, infatti, che l’anima del longherone appare scarica.

ANALISI STATICA E DINAMICA DELL’ EQUILIBRATORE DEL VELIVOLO SF-260
23
Fig.7.3 – Sforzi sul longherone dovuti ai carichi da manovra
- il momento flettente è prevalentemente sopportato dai correnti del longherone, che sono caricati a trazione (corrente inferiore) ed a compressione (corrente superiore). Anche i pannelli sopportano una parte di questo carico e per la verifica a resistenza, è necessario distinguere tra faccia superore od inferiore degli elementi: in essi gli sforzi hanno andamento trapezoidale (crescente in modulo con la distanza dal piano delle corde), per cui, sia per la compressione, sia per la trazione, non è sufficiente calcolare un valore medio di sforzo. Si deve valutare quello in corrispondenza della superficie esterna. Viene in seguito riportato il diagramma dell’azione assiale solo nel corrente superiore in quanto è qualitativamente analogo a quella nel corrente inferiore. Si noti che in corrispondenza dei vincoli esterni l’azione assiale si annulla in quanto sono stati utilizzati elementi RBE2.

ANALISI STATICA E DINAMICA DELL’ EQUILIBRATORE DEL VELIVOLO SF-260
24
Fig.7.4 – Azioni assiali nei correnti dovuti ai carichi da manovra
- il momento torcente è prevalentemente sopportato dal tubo di torsione, che risulta essere
l’elemento più sollecitato di tutta la struttura.
Fig.7.5 – Sforzi sul tubo di torsione dovuti ai carichi da manovra

ANALISI STATICA E DINAMICA DELL’ EQUILIBRATORE DEL VELIVOLO SF-260
25
- la condizione di carico vincolante è senza dubbio quella di manovra, e ciò è evincibile immediatamente dal semplice confronto degli sforzi e delle deformazioni, presenti nei due casi, effettuato nella seguente tabella. In essa vengono riportate le sollecitazioni dovute alla raffica come percentuali di quelle dovute alla manovra:
Spostamenti e sforzi dovuti alla raffica rispetto alla manovra (%)
Spostamento massimo (mm) 20,011 Sforzo massimo nei pannelli (N/mm2) 20,012 Sforzo massimo a taglio nell’anima del longherone (N/mm2) 20,028 Azione massima assiale nel corrente superiore (N) 20,012 Azione massima assiale nel corrente inferiore (N) 20,012
Tab.7.4 – Deformazioni e sforzi da raffica rispetto a quelli da manovra
Si noti comunque come questa sia solamente stata una verifica della corretta modellizzazione del fenomeno: i risultati ottenuti erano immediatamente deducibili dal fatto che i carichi di manovra hanno la stessa distribuzione di quelli di raffica, ma sono 5 volte maggiori in modulo e le deformazioni sono in campo elastico.
7.3 - Analisi dinamica 7.3.1 - Analisi modale Per quanto riguarda lo studio dei modi propri dell’equilibratore, non è stato possibile riferirsi solo a mezza struttura, come effettuato per l’analisi dinamica, in quanto si sarebbero individuate esclusivamente le frequenze di deformazioni simmetriche, perdendo, invece, quelle antisimmetriche che, si vedrà, essere presenti. Si riportano di seguito i primi 20 modi propri, con i relativi comportamenti della struttura: Modo Frequenza (Hz) Comportamento
1 18,5 Flessione antisimmetrica dell’equilibratore nel proprio piano 2 22,4 Flessione simmetrica dell’equilibratore nel proprio piano 3 25,3 Flessione del semi-equilibratore sinistro 4 25,5 Flessione del semi-equilibratore destro 5 33,7 Imbozzamento dei secondi pannelli di sinistra 6 35,7 Imbozzamento biconvesso dei secondi pannelli di sinistra 7 38,9 Imbozzamento dei terzi pannelli di sinistra 8 41,5 Imbozzamento dei quarti pannelli di sinistra 9 43,3 Imbozzamento dei quarti pannelli di destra 10 43,3 Imbozzamento biconvesso dei terzi pannelli di sinistra 11 46,3 Imbozzamento biconvesso dei quarti pannelli di sinistra
ANALISI STATICA E DINAMICA DELL’ EQUILIBRATORE DEL VELIVOLO SF-260
26
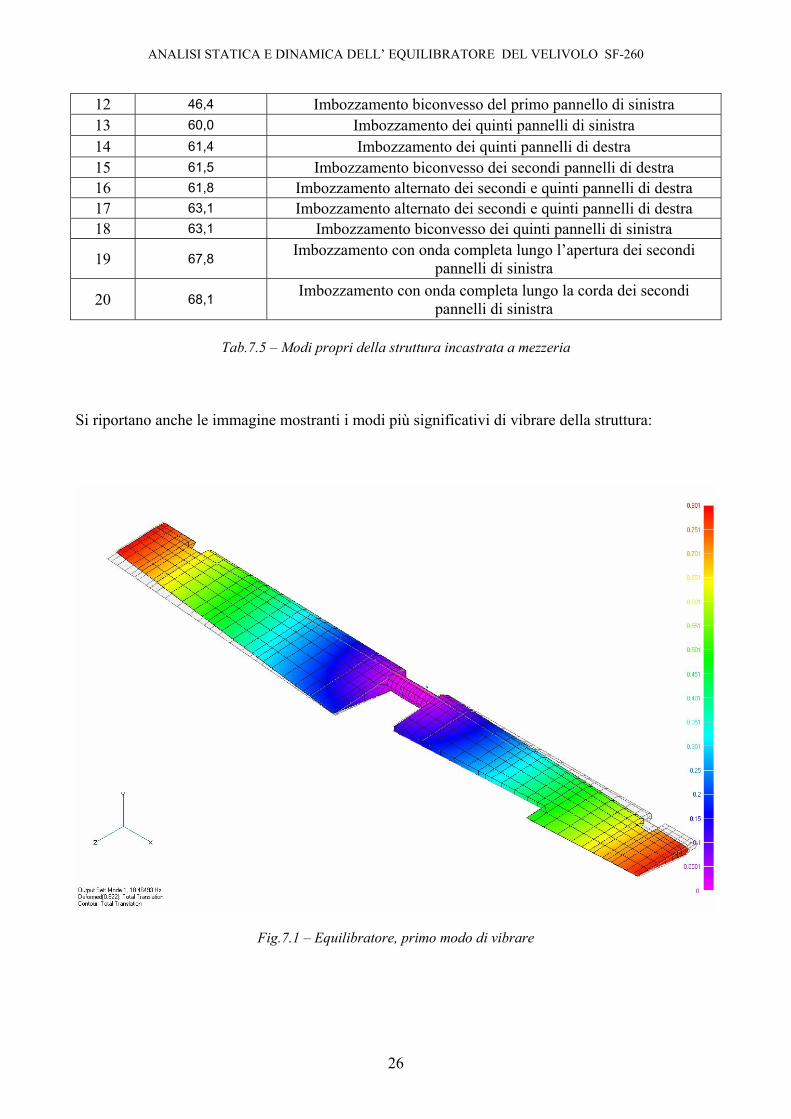
12 46,4 Imbozzamento biconvesso del primo pannello di sinistra 13 60,0 Imbozzamento dei quinti pannelli di sinistra 14 61,4 Imbozzamento dei quinti pannelli di destra 15 61,5 Imbozzamento biconvesso dei secondi pannelli di destra 16 61,8 Imbozzamento alternato dei secondi e quinti pannelli di destra 17 63,1 Imbozzamento alternato dei secondi e quinti pannelli di destra 18 63,1 Imbozzamento biconvesso dei quinti pannelli di sinistra
19 67,8 Imbozzamento con onda completa lungo l’apertura dei secondi pannelli di sinistra
20 68,1 Imbozzamento con onda completa lungo la corda dei secondi pannelli di sinistra
Tab.7.5 – Modi propri della struttura incastrata a mezzeria
Si riportano anche le immagine mostranti i modi più significativi di vibrare della struttura:
Fig.7.1 – Equilibratore, primo modo di vibrare

ANALISI STATICA E DINAMICA DELL’ EQUILIBRATORE DEL VELIVOLO SF-260
27
Fig.7.2 – Equilibratore, secondo modo di vibrare
Fig.7.3 – Equilibratore, terzo modo di vibrare

ANALISI STATICA E DINAMICA DELL’ EQUILIBRATORE DEL VELIVOLO SF-260
28
Fig.7.4 – Equilibratore, quinto modo di vibrare
Fig.7.5 – Equilibratore, quattordicesimo modo di vibrare

ANALISI STATICA E DINAMICA DELL’ EQUILIBRATORE DEL VELIVOLO SF-260
29
Fig.7.6 – Equilibratore, diciannovesimo modo di vibrare
Fig.7.7 – Equilibratore, ventesimo modo di vibrare

ANALISI STATICA E DINAMICA DELL’ EQUILIBRATORE DEL VELIVOLO SF-260
30
Si noti come la scelta di un numero di elementi superiore a quattro, nelle due direzioni, per ciascun pannello, permetta il corretto calcolo dei modi caratterizzati da una deformazione ad onda intera, come il 19° ed il 20°. Se, invece, l’analisi non lo richiedesse, una discretizzazione inferiore potrebbe portare comunque a risultati soddisfacenti.
8 - Considerazioni 8.1 - Verifica dei parametri Caso statico E’ necessario verificare ora che i parametri settati precedentemente, in particolare luogo il “bending stiffness” ed il “K6ROT”, non abbiano inciso eccessivamente sui risultati dell’analisi statica. Il controllo verrà effettuato in base allo spostamento di un nodo posto sul contorno di una centina, e del massimo sforzo calcolato sul longherone, i quali non sono, in prima approssimazione, condizionati dalla scelta di tali parametri.
Bending stiffness K6ROT Max Total
Translation errore commesso sugli spostamenti
Max Plate VMS
(N/mm2)
errore commessosugli sforzi
3 1 6,4412 111,887 Manovra
0 0 6,6726 3,46%
112,183 0,26%
3 1 1,289 22,391 Raffica
0 0 1,335 3,44%
22,450 0,26%
Tab.8.1 – Influenza dei parametri sulle deformazioni e sugli sforzi
Si vede che gli errori sono del tutto trascurabili, per cui la scelta dei parametri è stata corretta. Caso dinamico Si mostra come la variazione della rigidezza a flessione dei pannelli, comporti una notevole alterazione delle frequenze proprie di vibrare dei pannelli, seppure lasci sostanzialmente immutate quelle riferite alla struttura intera:
Bending stiffness = 1 Bending stiffness = 3 Modo Frequenza (Hz) Frequenza (Hz) errore %
1 18,5 18,5 0,07 2 22,4 22,4 0,10 3 25,3 25,7 1,60 4 25,5 25,9 1,51
Modi di struttura

ANALISI STATICA E DINAMICA DELL’ EQUILIBRATORE DEL VELIVOLO SF-260
31
5 33,7 53,5 58,6 6 35,7 59,4 66,2 7 38,9 60,7 56,0 8 41,5 66,1 59,4 9 43,3 66,5 53,7 10 43,3 69,2 59,7 11 46,3 77,7 67,7 12 46,4 77,8 67,8 13 60,0 90,4 50,5 14 61,4 92,1 50,0 15 61,5 97,8 59,0 16 61,8 99,6 61,2 17 63,1 106 68,5 18 63,1 106 68,5 19 67,8 108 59,3 20 68,1 110 61,6
Modi di pannello
Tab.8.1 – Influenza dei parametri sui modi propri
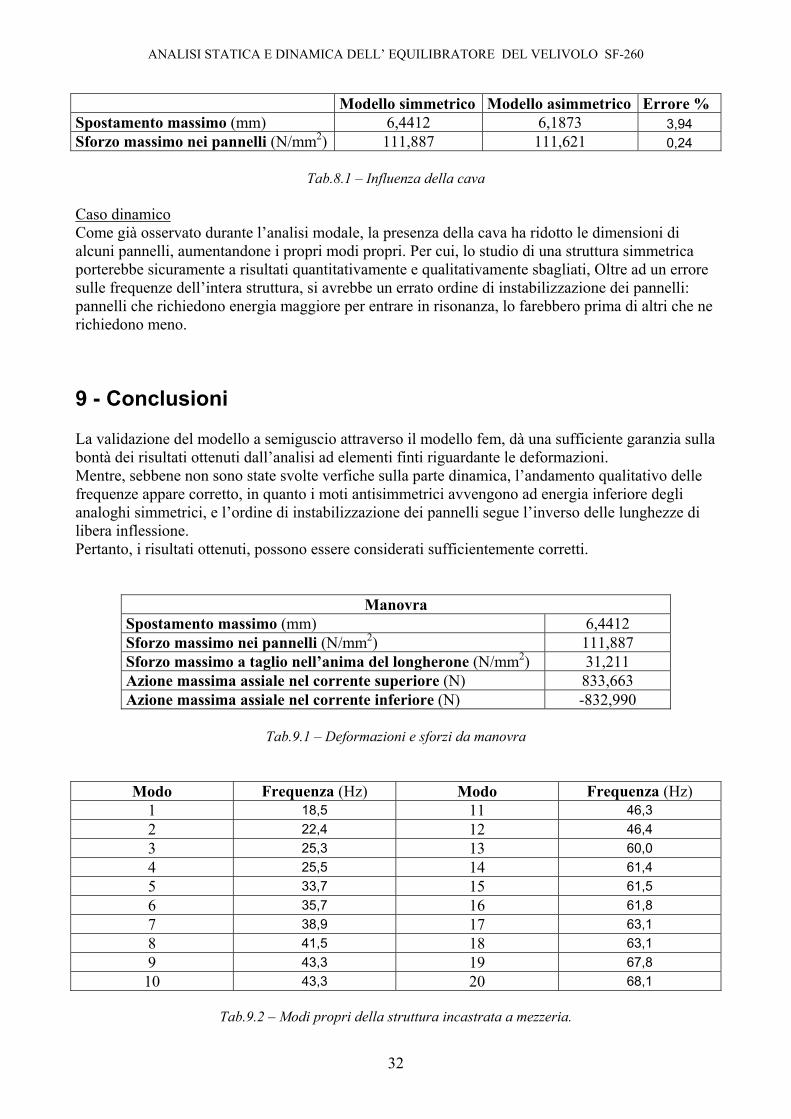
Per cui, è stato necessario mantenere il valore di “bending stiffness” unitario per la soluzione dei modi. I disegni riportati in questa relazione, però, sono stati ottenuti ponendo il bending stiffness pari a 3, esclusivamente per ottenere una migliore visualizzazione grafica. Per quanto riguarda il parametro “K6ROT”, si è notato che, almeno per valori inferiori alla decina, la sua influenza è trascurabile sulle frequenze, ed è stato posto pari ad 1. Caso free-free L’importanza di questa analisi è esclusivamente qualitativa, per cui la scelta dei parametri è di secondaria rilevanza. 8.2 - Necessità della modellazione della cava Si vuole ora verificare quale errore si sarebbe commesso se l’analisi della struttura fosse stata svolta trascurando la presenza della cava dell’aletta di trim: Caso statico L’analisi statica di un modello simmetrico avrebbe portato a risultati molto simili a quelli ottenuti con uno asimmetrico. Nella seguente tabella, nella quale viene riportato il solo caso della manovra, in quanto è il più critico, si vede l’errore che si sarebbe commesso:
ANALISI STATICA E DINAMICA DELL’ EQUILIBRATORE DEL VELIVOLO SF-260
32
Modello simmetrico Modello asimmetrico Errore % Spostamento massimo (mm) 6,4412 6,1873 3,94 Sforzo massimo nei pannelli (N/mm2) 111,887 111,621 0,24
Tab.8.1 – Influenza della cava Caso dinamico Come già osservato durante l’analisi modale, la presenza della cava ha ridotto le dimensioni di alcuni pannelli, aumentandone i propri modi propri. Per cui, lo studio di una struttura simmetrica porterebbe sicuramente a risultati quantitativamente e qualitativamente sbagliati, Oltre ad un errore sulle frequenze dell’intera struttura, si avrebbe un errato ordine di instabilizzazione dei pannelli: pannelli che richiedono energia maggiore per entrare in risonanza, lo farebbero prima di altri che ne richiedono meno.
9 - Conclusioni La validazione del modello a semiguscio attraverso il modello fem, dà una sufficiente garanzia sulla bontà dei risultati ottenuti dall’analisi ad elementi finti riguardante le deformazioni. Mentre, sebbene non sono state svolte verfiche sulla parte dinamica, l’andamento qualitativo delle frequenze appare corretto, in quanto i moti antisimmetrici avvengono ad energia inferiore degli analoghi simmetrici, e l’ordine di instabilizzazione dei pannelli segue l’inverso delle lunghezze di libera inflessione. Pertanto, i risultati ottenuti, possono essere considerati sufficientemente corretti.
Manovra Spostamento massimo (mm) 6,4412 Sforzo massimo nei pannelli (N/mm2) 111,887 Sforzo massimo a taglio nell’anima del longherone (N/mm2) 31,211 Azione massima assiale nel corrente superiore (N) 833,663 Azione massima assiale nel corrente inferiore (N) -832,990
Tab.9.1 – Deformazioni e sforzi da manovra
Modo Frequenza (Hz) Modo Frequenza (Hz) 1 18,5 11 46,3 2 22,4 12 46,4 3 25,3 13 60,0 4 25,5 14 61,4 5 33,7 15 61,5 6 35,7 16 61,8 7 38,9 17 63,1 8 41,5 18 63,1 9 43,3 19 67,8 10 43,3 20 68,1
Tab.9.2 – Modi propri della struttura incastrata a mezzeria.


















