
ANALISI DEI SISTEMI DI CONTROLLO A TEMPO … · CONTROLLI AUTOMATICI Prof. Bruno SICILIANO ANALISI...
46
CONTROLLI AUTOMATICI Prof. Bruno SICILIANO ANALISI DEI SISTEMI DI CONTROLLO A TEMPO CONTINUO Schema generale di controllo in retroazione Requisiti di un sistema di controllo Stabilit` a in condizioni nominali Margine di guadagno e margine di fase Analisi della funzione di sensitivit` a complementare Analisi della funzione di sensitivit` a Analisi della funzione di sensitivit` a del controllo Sensitivit` a rispetto a incertezze parametriche Illustrazioni dal Testo di Riferimento per gentile concessione degli Autori 1
Transcript of ANALISI DEI SISTEMI DI CONTROLLO A TEMPO … · CONTROLLI AUTOMATICI Prof. Bruno SICILIANO ANALISI...

CONTROLLI AUTOMATICI Prof. Bruno SICILIANO
ANALISI DEI SISTEMI DI CONTROLLO ATEMPO CONTINUO
Schema generale di controllo in retroazione
Requisiti di un sistema di controllo
Stabilita in condizioni nominali
Margine di guadagno e margine di fase
Analisi della funzione di sensitivitacomplementare
Analisi della funzione di sensitivita
Analisi della funzione di sensitivita del controllo
Sensitivita rispetto a incertezze parametriche
Illustrazioni dal Testo di Riferimento per gentile concessione degli Autori 1

CONTROLLI AUTOMATICI Prof. Bruno SICILIANO
SCHEMA GENERALE DI CONTROLLO INRETROAZIONE
� Schema di controllo in retroazione
? G(s): funzione di trasferimento del sistema sotto controllo(strettamente proprio)
? R(s): funzione di trasferimento del regolatore (anche nonstrettamente proprio)
Illustrazioni dal Testo di Riferimento per gentile concessione degli Autori 2

CONTROLLI AUTOMATICI Prof. Bruno SICILIANO
REQUISITI DI UN SISTEMA DI CONTROLLO
Stabilita
� Stabilita in condizioni nominali
? asintotica stabilita
� Stabilita in condizioni perturbate
? G(s) modello approssimato, variazioni parametriche
? stabilita robusta
Illustrazioni dal Testo di Riferimento per gentile concessione degli Autori 3

CONTROLLI AUTOMATICI Prof. Bruno SICILIANO
Prestazioni
� Prestazioni statiche in condizioni nominali
? segnali canonici dotati di trasformata di LaplaceA=si (sca-lino, rampa)
? segnali sinusoidali con componenti armoniche
� Prestazioni dinamiche in condizioni nominali
? segnale di riferimento e disturbo: scalini
? famiglia di risposte desiderate (Ta�, Ts, S%)
? moderazione della variabile di controllo (costo dell’azionedi controllo)
Illustrazioni dal Testo di Riferimento per gentile concessione degli Autori 4

CONTROLLI AUTOMATICI Prof. Bruno SICILIANO
Funzioni di sensitivita e limiti alle prestazioni
� Funzione di sensitivita
S(s) =1
1 +R(s)G(s)
� Funzione di sensitivita complementare
F (s) =R(s)G(s)
1 +R(s)G(s)
� Funzione di sensitivita del controllo
Q(s) =R(s)
1 +R(s)G(s)= F (s)G�1(s) = R(s)S(s)
+
24Y (s)U(s)E(s)
35 =
24F (s) S(s) �F (s)Q(s) �Q(s) �Q(s)S(s) �S(s) F (s)
3524W (s)D(s)N(s)
35
Illustrazioni dal Testo di Riferimento per gentile concessione degli Autori 5

CONTROLLI AUTOMATICI Prof. Bruno SICILIANO
� Idealmente
F (s) = 1 =) y = w
S(s) = 0 =) effetto nullo did suy
+
? mancanza di attenuazione dell’effetto din suy ee
? Q(s) = G�1(s)) jQ(j!)j crescente con! ) amplifica-zione componenti alta frequenza diu (in contrasto con ilrequisito di moderazione!)
? G(s) strettamente propria,R(s) al piu propria) L(s) =R(s)G(s) strettamente propria:F (s) strettamente propria,S(s) propria (lims!1 F (s) = 0, lims!1 S(s) = 1!)
� Azione combinata diF (s) eS(s) mediante scelta opportuna diR(s)
F (s) + S(s) = 1
? specifiche tradotte in termini diL(s)
Illustrazioni dal Testo di Riferimento per gentile concessione degli Autori 6

CONTROLLI AUTOMATICI Prof. Bruno SICILIANO
STABILITA IN CONDIZIONI NOMINALI
� Sistema retroazionato ai fini dell’analisi di stabilita (stabilitaindipendente dagli ingressi)
? condizione necessaria:L(s) non ha autovalori a parte realepositiva o nulla
� Asintotica stabilita: tutte le radici dell’equazione caratteristica
1 + L(s) = 0
hanno parte reale minore di zero
? possibile applicazione del criterio di Routh (di scarsa utilitanella sintesi di un regolatore)
? criterio di Nyquist
Illustrazioni dal Testo di Riferimento per gentile concessione degli Autori 7

CONTROLLI AUTOMATICI Prof. Bruno SICILIANO
Diagramma di Nyquist
� Percorso di Nyquist
� Diagramma di Nyquist = diagramma polare
Illustrazioni dal Testo di Riferimento per gentile concessione degli Autori 8

CONTROLLI AUTOMATICI Prof. Bruno SICILIANO
� Esempio
L(s) =�
1 + Ts
? diagrammi di Nyquist
Illustrazioni dal Testo di Riferimento per gentile concessione degli Autori 9

CONTROLLI AUTOMATICI Prof. Bruno SICILIANO
Criterio di Nyquist
� Ipotesi
? P: numero di poli diL(s) aRe > 0
? N: numero di giri compiuti dal diagramma di Nyquist diL(s) attorno al punto�1 (positivi se in senso antiorario,negativi se in senso orario)
� Condizione necessaria e sufficiente perche il sistema retroazio-nato sia asintoticamente stabilee cheN sia ben definito e risultiN = P
� Dimostrazione
? L(s) = NL(s)=DL(s) senza radici in comune
K(s) = 1 + L(s) =NL(s) +DL(s)
DL(s)
zeri diK(s) = poli del sistema in anello chiuso
poli di K(s) = poli di L(s) (P aRe > 0)
? s = �j!: diagramma di Nyquist passa per l’origine delpiano complesso) K(s) ha uno o piu zeri in�j! (dia-gramma diL(s) passa per il punto�1: sistema in anellochiuso non asintoticamente stabile!)
Illustrazioni dal Testo di Riferimento per gentile concessione degli Autori 10

CONTROLLI AUTOMATICI Prof. Bruno SICILIANO
? K(s) non ha zeri ins = �j!
contributo di fase diZ zeri (�2� = un giro in senso orario)eP poli (2� = un giro in senso antiorario) diK(s) internial percorso
? numero di giri in senso antiorario attorno all’origineP �Z = N numero di rotazioni diL(s) intorno al punto�1) Z = 0 per l’asintotica stabilita (altrimentiP �N poli aRe > 0)
Illustrazioni dal Testo di Riferimento per gentile concessione degli Autori 11

CONTROLLI AUTOMATICI Prof. Bruno SICILIANO
� Esempio
L(s) =�
1 + Ts
? sistema in anello chiuso:s = �(1 + �)=T
? � > 0, T > 0: P = 0, N = 0) asintotica stabilita
? � > 0, T < 0: P = 1, N = 0) instabilita
? � < 0,T > 0:P = 0,N =
( 0 � > �1) as. stab.non definito � = �1�1 � < �1) instab.
? � < 0,T < 0:P = 1,N =
( 0 � > �1) instab.non definito � = �11 � < �1) as. stab.
Illustrazioni dal Testo di Riferimento per gentile concessione degli Autori 12

CONTROLLI AUTOMATICI Prof. Bruno SICILIANO
� Esempio
L(s) =�
s� > 0
? diagramma di Nyquist
? P = N = 0) asintotica stabilita (s = ��)
Illustrazioni dal Testo di Riferimento per gentile concessione degli Autori 13

CONTROLLI AUTOMATICI Prof. Bruno SICILIANO
� EsempioL(s) = �=s
2� > 0
? diagramma di Nyquist
? N non definito:s = �p�
Illustrazioni dal Testo di Riferimento per gentile concessione degli Autori 14

CONTROLLI AUTOMATICI Prof. Bruno SICILIANO
� Esempio
L(s) =�
(1 + s)3� > 0
? diagramma di Nyquist
? P = 0,N =
(0 xA > �1) asintotica stabilitanon definito xA = �1�2 xA < �1) instabilita
? valutazione dixA (!�: pulsazione di attraversamento)
argL(j!�) = �180�
!� =p3; jL(j!�)j = �=8 =) xA = ��=8
? � < 8: asintotica stabilita,� � 8: instabile
Illustrazioni dal Testo di Riferimento per gentile concessione degli Autori 15

CONTROLLI AUTOMATICI Prof. Bruno SICILIANO
Estensioni del criterio di Nyquist
� Guadagno d’anello variabile
1 + �~L(s) = 0
? come sopra, sostituendo al punto�1 il punto �1=� e aK(s)
~K(s) =1
�+ ~L(s)
Illustrazioni dal Testo di Riferimento per gentile concessione degli Autori 16

CONTROLLI AUTOMATICI Prof. Bruno SICILIANO
� Sistemi con retroazione positiva
? equazione caratteristica
1� ~L(s) = 0
? come sopra sostituendo al punto�1 il punto+1
Illustrazioni dal Testo di Riferimento per gentile concessione degli Autori 17

CONTROLLI AUTOMATICI Prof. Bruno SICILIANO
� Sistemi in anello aperto asintoticamente stabili
? P = 0) asintotica stabilita iff N = 0
? sistema con retroazione (negativa o positiva) conL(s) asin-toticamente stabile (diagramma di Bode del modulo sottol’asse a0 dB: jL(j!)j < 1, 8!) asintotica stabilita)
nel caso diR(s) = �: j�~L(j!)j < 1, 8! ) asintoticastabilita
come sopra:jargL(j!)j < 180�, 8!) asintotica stabilita
Illustrazioni dal Testo di Riferimento per gentile concessione degli Autori 18

CONTROLLI AUTOMATICI Prof. Bruno SICILIANO
� Esempio
L(s) =�
1 + 2�s=!n + s2=!2n
� > 0; !n > 0; 0 < � < 1
? sistema retroazionato asintoticamente stabile (al diminuiredi � diagramma si avvicina sempre piu al punto�1)
? come sopra nel caso di� � 1 (poli reali negativi)
Illustrazioni dal Testo di Riferimento per gentile concessione degli Autori 19

CONTROLLI AUTOMATICI Prof. Bruno SICILIANO
� Sistemi a stabilita condizionata
? sistema retroazionato, asintoticamente stabile per un de-terminato valore di�, diventa instabile al diminuire dellostesso
Illustrazioni dal Testo di Riferimento per gentile concessione degli Autori 20

CONTROLLI AUTOMATICI Prof. Bruno SICILIANO
� Esempio
L(s) =�(1 + s)2
s3� > 0
? P = 0,N =
(0 xA < �1) asintotica stabilitanon definito xA = �1�2 xA > �1) instabilita
? valutazione dixA
argL(j!�) = �180� =) !� = 1) xA = �2�
? � > 0:5: asintotica stabilita,� < 0:5: instabile
Illustrazioni dal Testo di Riferimento per gentile concessione degli Autori 21

CONTROLLI AUTOMATICI Prof. Bruno SICILIANO
� Sistemi con ritardo di tempo
L(s) = e��s
L0(s)
? sfasamento negativo tanto maggiore quanto piu e elevato ilvalore del ritardo� ) probabile instabilita del sistema inretroazione
Illustrazioni dal Testo di Riferimento per gentile concessione degli Autori 22

CONTROLLI AUTOMATICI Prof. Bruno SICILIANO
� Esempio
L(s) = e��s�
s� > 0
? diagramma polare
? P = 0, xA > �1: asintotica stabilita
argL(j!k) = �90� � !k�180=� = �180� � k360�
!k = (4k + 1)�=2� jL(j!k)j = 2��=(4k + 1)�
xA = �2��=�
? � < �=�: asintotica stabilita, altrimenti instabile
Illustrazioni dal Testo di Riferimento per gentile concessione degli Autori 23

CONTROLLI AUTOMATICI Prof. Bruno SICILIANO
MARGINE DI GUADAGNO E MARGINE DIFASE
� Stabilita robusta = distanza nel piano complesso del diagrammapolare diL(s) dal punto�1
? esigenza di indicatori sintetici del grado di robustezza (sem-plici da calcolare dai diagrammi di Bode): margini di stabi-lit a
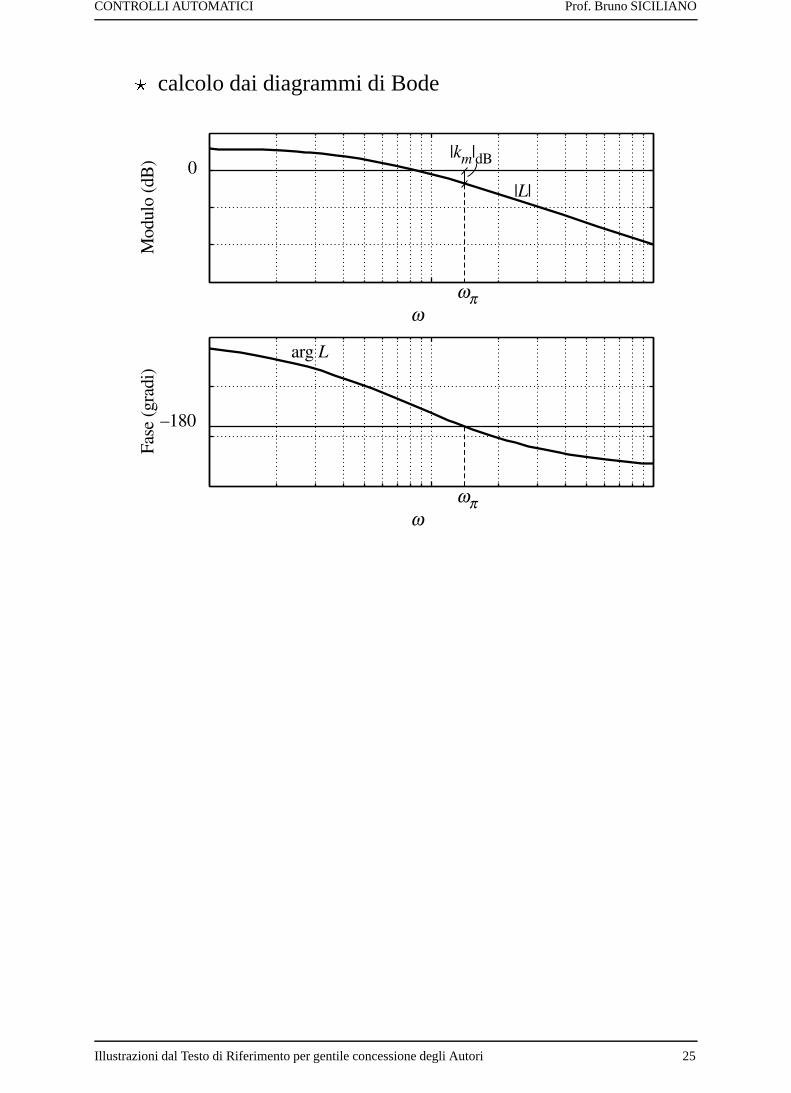
Margine di guadagno
� P = 0perL(s) con diagramma polare con una sola intersezionedel semiasse reale negativo
? margine di guadagno
km =1
jL(j!�)jargL(j!�) = �180�
Illustrazioni dal Testo di Riferimento per gentile concessione degli Autori 24
CONTROLLI AUTOMATICI Prof. Bruno SICILIANO
? calcolo dai diagrammi di Bode
Illustrazioni dal Testo di Riferimento per gentile concessione degli Autori 25

CONTROLLI AUTOMATICI Prof. Bruno SICILIANO
� Sistema retroazionato con guadagno d’anello modificato
? asintotica stabilita perk < km (grado di robustezza a frontedi possibili incertezze sul guadagno d’anello)
� Esempio
L(s) =4
(1 + s)3
? km = 2
Illustrazioni dal Testo di Riferimento per gentile concessione degli Autori 26

CONTROLLI AUTOMATICI Prof. Bruno SICILIANO
Margine di fase
� P = 0 perL(s) con guadagno positivo e diagramma polarecon una sola intersezione del semiasse reale negativo
? margine di fase (!c: pulsazione critica)
'm = 180�� j'cj 'c = argL(j!c) jL(j!c)j = 1
Illustrazioni dal Testo di Riferimento per gentile concessione degli Autori 27

CONTROLLI AUTOMATICI Prof. Bruno SICILIANO
? calcolo dai diagrammi di Bode
Illustrazioni dal Testo di Riferimento per gentile concessione degli Autori 28

CONTROLLI AUTOMATICI Prof. Bruno SICILIANO
� Sistema retroazionato con ritardo
? asintotica stabilita per� < ('m=!c)�=180 (grado di robu-stezza a fronte di possibili incertezze sulla fase della fun-zione d’anello)
� Esempio
L(s) =4
(1 + s)3
jL(j!c)j = 1
!c ' 1:23 'c = argL(j!c) ' �153� =) 'm ' 27�
Illustrazioni dal Testo di Riferimento per gentile concessione degli Autori 29

CONTROLLI AUTOMATICI Prof. Bruno SICILIANO
� Sistema del secondo ordine, privo di zeri, con guadagno unitario
? coppia di poli complessi coniugati, dominanti (nettamentepiu vicini all’asse immaginario rispetto agli altri poli)
jF (j!c)j =jL(j!c)j
j1 + L(j!c)j=
1
j1 + ej'c j
=1q
(1 + cos'c)2 + sin 2'c
=1p
2(1 + cos'c)
=1p
2(1� cos'm)=
1
2sin ('m=2)
jF (j!c)j =1
2�
+
� = sin ('m=2)
? in maniera approssimata
� ='m
2
�
180' 'm
100
Illustrazioni dal Testo di Riferimento per gentile concessione degli Autori 30

CONTROLLI AUTOMATICI Prof. Bruno SICILIANO
ANALISI DELLA FUNZIONE DI SENSITIVITACOMPLEMENTARE
� Prestazioni statiche e dinamiche del sistema (asintoticamentestabile)
� Funzione di sensitivita complementare
F (s) =L(s)
1 + L(s)
? funzione di trasferimento tra il riferimentow e l’uscitay
? funzione di trasferimento, cambiata di segno, tra il di-sturbon e l’uscitay
? funzione di trasferimento tra il disturbon e l’erroree
Illustrazioni dal Testo di Riferimento per gentile concessione degli Autori 31

CONTROLLI AUTOMATICI Prof. Bruno SICILIANO
Analisi statica
� Funzione di trasferimento d’anello
L(s) =�Q
i(1 + �is)Q
i(1 + 2�is=�ni + s2=�2ni)
sgQ
i(1 + Tis)Q
i(1 + 2�is=!ni + s2=!2ni)
lims!0
F (s) = lims!0
�
sg + �=
8><>:
�
1 + �g = 0
1 g > 00 g < 0
? w(t) = Asca(t)
y1
= lims!0
sF (s)A
s= A lim
s!0F (s)
+
� Prestazioni statiche
? migliori quandoL possiede almeno un polo nell’origineg > 0
? if g = 0 then conviene aumentare�
� = �1: F (s) instabile
? if g < 0,F (s) contiene almeno un’azione derivativa (y = 0in corrispondenza di qualunqueA)
Illustrazioni dal Testo di Riferimento per gentile concessione degli Autori 32

CONTROLLI AUTOMATICI Prof. Bruno SICILIANO
Poli e zeri
� Comportamento dinamico
F (s) =NL(s)
DL(s) +NL(s)
? zeri diF (s) = zeri diL(s)
? poli diF (s) = radici del polinomio caratteristico del sistemaretroazionato (luogo delle radici)
Illustrazioni dal Testo di Riferimento per gentile concessione degli Autori 33

CONTROLLI AUTOMATICI Prof. Bruno SICILIANO
Risposta in frequenza
� P = 0 perL(s), diagramma di Bode dijL(j!)j attraversa unasola volta l’asse a0 dB
jF (j!)j = jL(j!)jj1 + L(j!)j '
�1 ! � !c
jL(j!)j ! > !c
� Comportamento da filtro passa-basso con guadagno unitario ebanda passante' pulsazione critica
? tutte le componenti diwa pulsazione minore di!c riprodottefedelmente iny (anche per le componenti din!)
+
? progetto del sistema di controllo: conveniente aumentare!c per poter inseguire variazioni veloci diw (attenzionecomponenti din in alta frequenza!)
Illustrazioni dal Testo di Riferimento per gentile concessione degli Autori 34

CONTROLLI AUTOMATICI Prof. Bruno SICILIANO
ANALISI DELLA FUNZIONE DI SENSITIVITA
� Funzione di sensitivita
S(s) =1
1 + L(s)
? funzione di trasferimento tra il disturbod e l’uscitay
? funzione di trasferimento tra il riferimentow e l’erroree
? funzione di trasferimento, cambiata di segno, tra il disturbod e l’erroree
Illustrazioni dal Testo di Riferimento per gentile concessione degli Autori 35

CONTROLLI AUTOMATICI Prof. Bruno SICILIANO
Analisi statica
� Funzione di trasferimento d’anello in forma fattorizzata
lims!0
S(s) = lims!0
sg
sg + �=
8><>:
1
1 + �g = 0
0 g > 01 g < 0
? w(t) = Asca(t)
e1
= lims!0
sS(s)A
s= A lim
s!0S(s)
+
� Prestazioni statiche
? migliori quandoL possiede almeno un polo nell’origineg > 0
? if g = 0 then conviene aumentare�
? if g < 0,F (s) contiene almeno un’azione derivativa (e = A
in corrispondenza di qualunqueA)
Illustrazioni dal Testo di Riferimento per gentile concessione degli Autori 36

CONTROLLI AUTOMATICI Prof. Bruno SICILIANO
� Errore a regime con ingresso canonico al variare del tipo dellafunzione d’anello
e1
= lims!0
sS(s)A
si= A lim
s!0
sg�i+1
sg + �=
8>>><>>>:
1 g < i� 1
A
�g = i� 1
0 g > i� 1
Asca(t) Aram(t) Apar(t)
g = 0A
1 + �1 1
g = 1 0A
�1
g = 2 0 0A
�
g = 3 0 0 0
Illustrazioni dal Testo di Riferimento per gentile concessione degli Autori 37

CONTROLLI AUTOMATICI Prof. Bruno SICILIANO
Poli e zeri
� Comportamento dinamico
S(s) =DL(s)
DL(s) +NL(s)
? zeri diS(s) = poli di L(s)
? poli di S(s) = poli di F (s)
Illustrazioni dal Testo di Riferimento per gentile concessione degli Autori 38
CONTROLLI AUTOMATICI Prof. Bruno SICILIANO
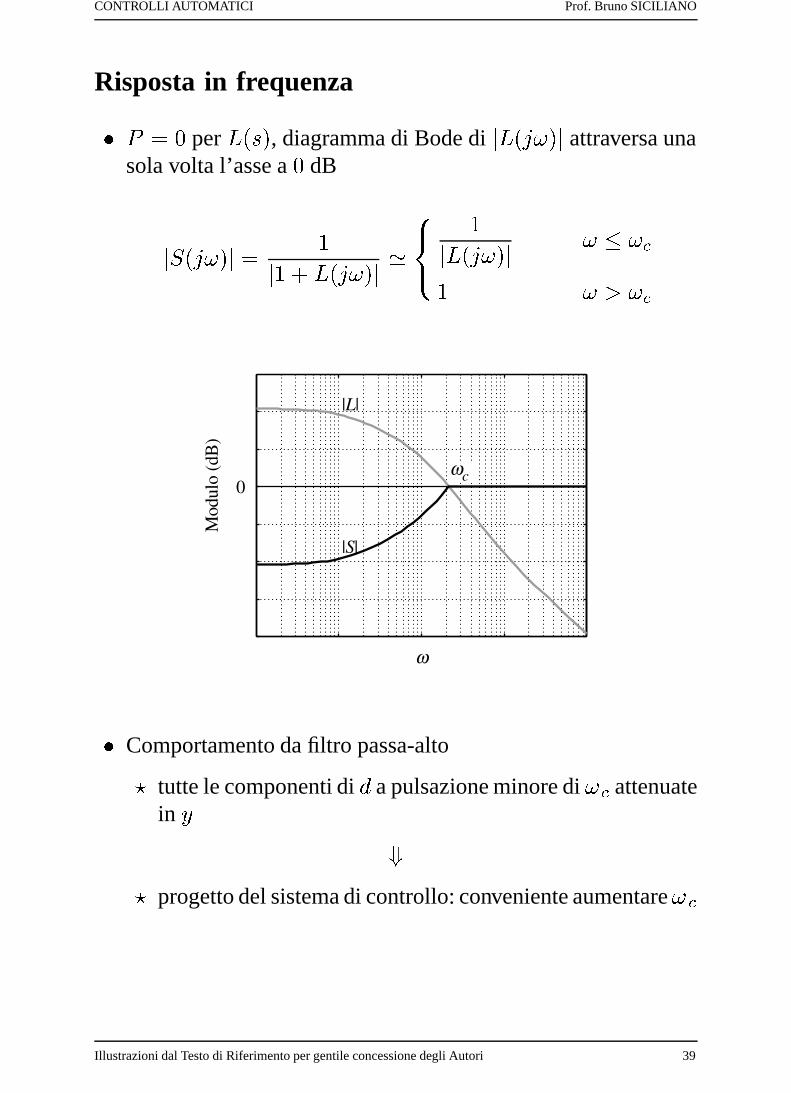
Risposta in frequenza
� P = 0 perL(s), diagramma di Bode dijL(j!)j attraversa unasola volta l’asse a0 dB
jS(j!)j = 1
j1 + L(j!)j '
8<:
1
jL(j!)j ! � !c
1 ! > !c
� Comportamento da filtro passa-alto
? tutte le componenti did a pulsazione minore di!c attenuatein y
+
? progetto del sistema di controllo: conveniente aumentare!c
Illustrazioni dal Testo di Riferimento per gentile concessione degli Autori 39

CONTROLLI AUTOMATICI Prof. Bruno SICILIANO
ANALISI DELLA FUNZIONE DI SENSITIVITADEL CONTROLLO
� Funzione di sensitivita del controllo
Q(s) =R(s)
1 +R(s)G(s)= R(s)S(s) = F (s)G�1(s)
? funzione di trasferimento tra il riferimentow e la variabiledi controllou
? funzione di trasferimento, cambiata di segno, tra il disturbod e la variabile di controllou
? funzione di trasferimento, cambiata di segno, tra il disturbon e la variabile di controllou
Illustrazioni dal Testo di Riferimento per gentile concessione degli Autori 40

CONTROLLI AUTOMATICI Prof. Bruno SICILIANO
Analisi statica
� Funzione di trasferimento d’anello in forma fattorizzata
lims!0
Q(s) = lims!0
�RS(s) =�R
1 + �= lim
s!0
F (s)
�G=
�
�G(1 + �)
? if � � 1 then �Q ' ��1
G : u1
inversamente proporzio-nale al guadagno del processo da controllare) buone pre-stazioni statiche solo con valori elevati della variabile dicontrollo
Illustrazioni dal Testo di Riferimento per gentile concessione degli Autori 41
CONTROLLI AUTOMATICI Prof. Bruno SICILIANO
Poli e zeri
� Comportamento dinamico
Q(s) =NR(s)DG(s)
DR(s)DG(s) +NR(s)NG(s)=
NR(s)DG(s)
DL(S) +NL(s)
? zeri diQ(s) = zeri diR(s) + poli di G(s)
? poli di Q(s) = poli di F (s)
Illustrazioni dal Testo di Riferimento per gentile concessione degli Autori 42

CONTROLLI AUTOMATICI Prof. Bruno SICILIANO
Risposta in frequenza
� P = 0 perL(s), diagramma di Bode dijL(j!)j attraversa unasola volta l’asse a0 dB
jQ(j!)j = jR(j!)jj1 + L(j!)j '
8<:
1
jG(j!)j ! � !c
jR(j!)j ! > !c
+
? progetto del sistema di controllo: evitare l’impiego di rego-latori conjR(j!)j elevato ad alta frequenza (per limitare lesollecitazioni sulla variabile di controllo)
Illustrazioni dal Testo di Riferimento per gentile concessione degli Autori 43
CONTROLLI AUTOMATICI Prof. Bruno SICILIANO
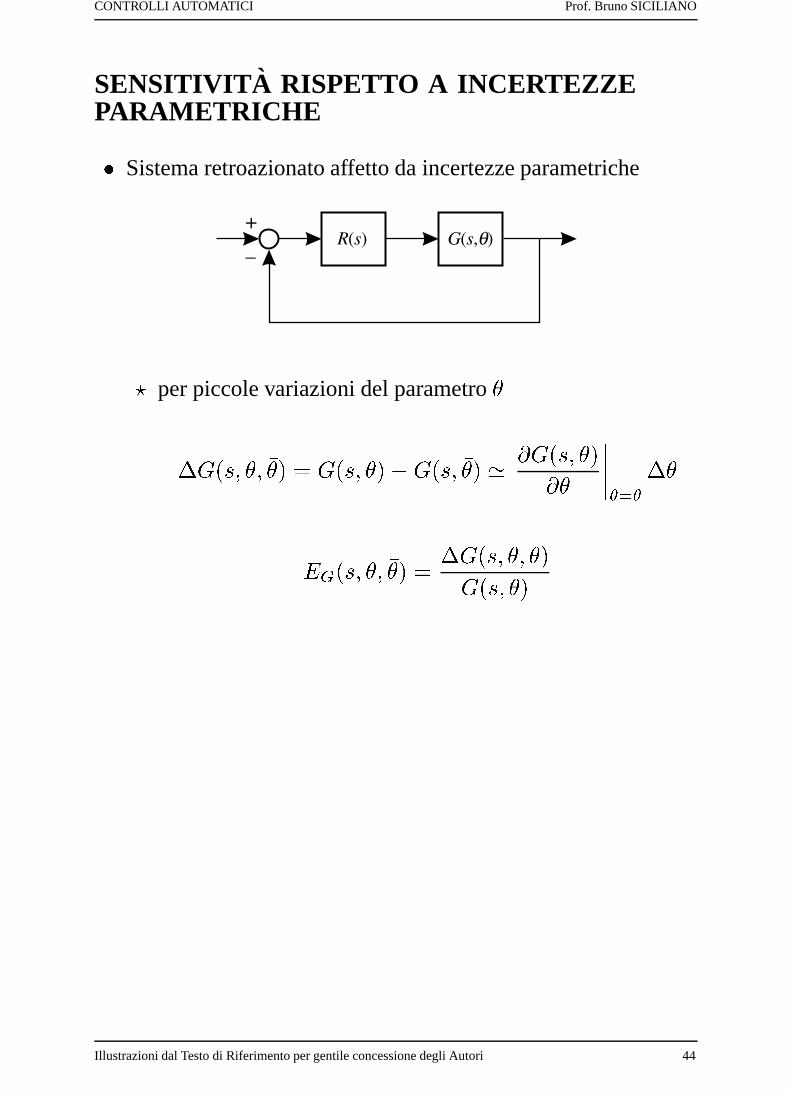
SENSITIVITA RISPETTO A INCERTEZZEPARAMETRICHE
� Sistema retroazionato affetto da incertezze parametriche
? per piccole variazioni del parametro�
�G(s; �; ��) = G(s; �)�G(s; ��) ' @G(s; �)
@�
�����=��
��
EG(s; �; ��) =�G(s; �; ��)
G(s; ��)
Illustrazioni dal Testo di Riferimento per gentile concessione degli Autori 44

CONTROLLI AUTOMATICI Prof. Bruno SICILIANO
? sistema in anello chiuso
F (s; �) =R(s)G(s; �)
1 +R(s)G(s; �)
@F (s; �)
@�=
R(s)
(1 +R(s)G(s; �))2
@G(s; �)
@�
EF (s; �; ��) =�F (s; �; ��)
F (s; ��)' 1
F (s; ��)
@F (s; �)
@�
�����=��
��
=1
1 +R(s)G(s; ��)
�G(s; �; ��)
G(s; ��)
= S(s; ��)EG(s; �; ��)
+��EF (j!; �; ��)
�� = ��S(j!; ��)�� ��EG(j!; �; ��)��
� Nell’intervallo di pulsazioni in cui��S(j!; ��)��� 1, la presenza
della retroazione produce una notevole attenuazione dell’effettodell’incertezza
Illustrazioni dal Testo di Riferimento per gentile concessione degli Autori 45

CONTROLLI AUTOMATICI Prof. Bruno SICILIANO
� Esempio: sistema retroazionato con guadagno d’anello incerto(~L(0) = 1)
? in anello aperto
EL(s; �; ��) =��
��
? in anello chiuso
EF (0; �; ��) =��F��f
=1
1 + ��F
��
��
Illustrazioni dal Testo di Riferimento per gentile concessione degli Autori 46


















