An Optimized Track Length in Roadway Inductive Power Transfer Systems
12
2168-6777 (c) 2013 IEEE. Personal use is permitted, but republication/redistribution requires IEEE permission. See http://www.ieee.org/publications_standards/publications/rights/index.html for more information. This article has been accepted for publication in a future issue of this journal, but has not been fully edited. Content may change prior to final publication. Citation information: DOI 10.1109/JESTPE.2014.2301460, IEEE Journal of Emerging and Selected Topics in Power Electronics IEEE JOURNAL OF EMMERGING AND SELECTED TOPICS IN POWER ELECTRONICS, VOL.X, NO. X, MONTH 2014 1 An Optimized Track Length in Roadway Inductive Power Transfer Systems Wei Zhang, Student Member, IEEE, Siu-Chung Wong, Senior Member, IEEE, Chi K. Tse, Fellow, IEEE, and Qianhong Chen, Member, IEEE Abstract—Application of inductive power transfer (IPT) to electric vehicles moving along the road can provide more charg- ing flexibility with reduction of weight and size of charge-storage batteries required in the vehicles. Existing research focuses on the efficiency improvement and alignment tolerance of the IPT transformer. Consideration of the transformer track length and the vehicle speed is rarely discussed. In this paper, an IPT vehicle charging system using a series of sectional tracks is studied. The relationship among various key parameters, such as vehicle speed, system efficiency and power utilization of the IPT system, is studied in detail. Specifically, the impact on efficiency due to variation of track length and edge correction is reported. The extension of the system from a single pickup to multiple pickups is discussed. Results are verified with finite-element-analysis (FEA) simulation and a scale-down experimental prototype. Index Terms—Roadway vehicle inductive power transfer, sec- tional tracks, coupling coefficient. I. I NTRODUCTION I NDUCTIVE power transfer (IPT) is an emerging technol- ogy for transferring power to a load without any mechanical contact. Applications of IPT have rapidly gained popularity in the industrial and commercial sectors as IPT offers a clean, safe and robust way of delivering power. Examples of IPT applications include wireless charging of home appliances such as electric toothbrushes and mobile phones [1]–[3], and transcutaneous power transfer to medical implants [4], [5]. In high power applications, battery charging to electric vehicles (EVs) [6]–[8] and industrial material handling systems [9] are among the popular examples. In most EV charging systems, the vehicle is designed such that power is transferred wirelessly when the car is parked in a power station, i.e., static charging [10]. Recent development, however, has focused on dynamic charging in order to provide maximum charging flexibility [11]–[14]. One example of dynamic charging is the monorail system, in which pickup is placed on a bogie whose movement relative to the track is naturally constrained and the air gap is relatively small [13], [15]. An obvious drawback of such a system is Manuscript received September 30, 2013; received November 20, 2013; accepted January 11, 2014. This work is supported by Hong Kong RGC General Research Fund, PolyU 5274/13E. A preliminary version of this paper was presented at the IEEE Energy Conversion Congress and Exposition, (ECCE2011), Phoenix, Arizona, USA, September 2011. W. Zhang, S. C. Wong and C. K. Tse are with the Department of Elec- tronic and Information Engineering, The Hong Kong Polytechnic University, Kowloon, Hong Kong (Email: [email protected]). Q. Chen is with the Nanjing University of Aeronautics and Astronautics, Nanjing 210016, China. that the vehicle can only move along a defined track, which is not applicable to electric vehicles. Recently, the technique of dynamic powering of vehicles on monorails has found applications on floor mounted people movers [16] and roadway powered vehicles. An IPT roadway vehicle system is a hands- free charging system that offers convenience and reliability unaffected by dirt, chemicals, weather, etc. Roadway vehicle charging using IPT has already been proposed for more than two decades [17]. However, commer- cial development has been slow mainly due to a number of technological barriers. The transformer primary windings or the tracks buried below the surface of the road are usually constructed in the form of an elongated loop, which can be coupled to more than one transformer secondary windings or pickups. Longer track length than that of pickup and their large air gap (of up to 20 cm) may lead to large leakage flux. The resulting coupling coefficient may be lower than 10%. Methods have been proposed to improve the coupling with minimal ferrite volume and weight such as the adoption of a fish-bone structure of a slim W-type primary core [18] [19]. Besides efficiency enhancement, research has focused on alleviating the positional alignment constraint between the pickup and the track conductors. A multi-phase pickup with both vertical and horizontal wounded coils to capture mag- netic flux in both directions has been proposed to increase the tolerance of lateral movement [20]. Alternatively, track modification such as the polyphase track configuration has been employed to compensate the misalignment by producing a traveling magnetic wave [21]–[23]. The disadvantage of such a system is the high cost and complexity of the power supplies, the fabrication and installation required for multiple phases, and the necessary measures needed to cope with the power imbalance problem [24]. Besides the long loop track of the conventional RVIPT system, circular or rectangular magnetic structures which are ideal for stationary vehicles with tight alignment tolerance have been studied [6], [7], [25], [26]. When such structures are used for roadway moving vehicles, a standard pickup may be half over one primary segment and half over the next primary segment. The actual power coupled can be zero unless the segments have alternative poles [27], [28] or been excited sequentially [29]. There is still lack of an effective design of the IPT transformer with consideration of the transformer track distance and the vehicle speed to suit various traffic conditions. In this paper, a roadway vehicle IPT system (RVIPT) that 0000–0000/00$00.00 c 2014 IEEE
Transcript of An Optimized Track Length in Roadway Inductive Power Transfer Systems

2168-6777 (c) 2013 IEEE. Personal use is permitted, but republication/redistribution requires IEEE permission. Seehttp://www.ieee.org/publications_standards/publications/rights/index.html for more information.
This article has been accepted for publication in a future issue of this journal, but has not been fully edited. Content may change prior to final publication. Citation information: DOI10.1109/JESTPE.2014.2301460, IEEE Journal of Emerging and Selected Topics in Power Electronics
IEEE JOURNAL OF EMMERGING AND SELECTED TOPICS IN POWER ELECTRONICS, VOL.X, NO. X, MONTH 2014 1
An Optimized Track Length in Roadway InductivePower Transfer Systems
Wei Zhang,Student Member, IEEE, Siu-Chung Wong,Senior Member, IEEE, Chi K. Tse,Fellow, IEEE, andQianhong Chen,Member, IEEE
Abstract—Application of inductive power transfer (IPT) toelectric vehicles moving along the road can provide more charg-ing flexibility with reduction of weight and size of charge-storagebatteries required in the vehicles. Existing research focuses onthe efficiency improvement and alignment tolerance of the IPTtransformer. Consideration of the transformer track length andthe vehicle speed is rarely discussed. In this paper, an IPT vehiclecharging system using a series of sectional tracks is studied.The relationship among various key parameters, such as vehiclespeed, system efficiency and power utilization of the IPT system,is studied in detail. Specifically, the impact on efficiency due tovariation of track length and edge correction is reported. Theextension of the system from a single pickup to multiple pickups isdiscussed. Results are verified with finite-element-analysis (FEA)simulation and a scale-down experimental prototype.
Index Terms—Roadway vehicle inductive power transfer, sec-tional tracks, coupling coefficient.
I. I NTRODUCTION
I NDUCTIVE power transfer (IPT) is an emerging technol-ogy for transferring power to a load without any mechanical
contact. Applications of IPT have rapidly gained popularity inthe industrial and commercial sectors as IPT offers a clean,safe and robust way of delivering power. Examples of IPTapplications include wireless charging of home appliancessuch as electric toothbrushes and mobile phones [1]–[3], andtranscutaneous power transfer to medical implants [4], [5]. Inhigh power applications, battery charging to electric vehicles(EVs) [6]–[8] and industrial material handling systems [9]areamong the popular examples.
In most EV charging systems, the vehicle is designedsuch that power is transferred wirelessly when the car isparked in a power station, i.e., static charging [10]. Recentdevelopment, however, has focused on dynamic charging inorder to provide maximum charging flexibility [11]–[14]. Oneexample of dynamic charging is the monorail system, in whichpickup is placed on a bogie whose movement relative to thetrack is naturally constrained and the air gap is relativelysmall [13], [15]. An obvious drawback of such a system is
Manuscript received September 30, 2013; received November 20, 2013;accepted January 11, 2014. This work is supported by Hong Kong RGCGeneral Research Fund, PolyU 5274/13E. A preliminary version of this paperwas presented at the IEEE Energy Conversion Congress and Exposition,(ECCE2011), Phoenix, Arizona, USA, September 2011.
W. Zhang, S. C. Wong and C. K. Tse are with the Department of Elec-tronic and Information Engineering, The Hong Kong Polytechnic University,Kowloon, Hong Kong (Email: [email protected]).
Q. Chen is with the Nanjing University of Aeronautics and Astronautics,Nanjing 210016, China.
that the vehicle can only move along a defined track, whichis not applicable to electric vehicles. Recently, the techniqueof dynamic powering of vehicles on monorails has foundapplications on floor mounted people movers [16] and roadwaypowered vehicles. An IPT roadway vehicle system is a hands-free charging system that offers convenience and reliabilityunaffected by dirt, chemicals, weather, etc.
Roadway vehicle charging using IPT has already beenproposed for more than two decades [17]. However, commer-cial development has been slow mainly due to a number oftechnological barriers. The transformer primary windingsorthe tracks buried below the surface of the road are usuallyconstructed in the form of an elongated loop, which can becoupled to more than one transformer secondary windings orpickups. Longer track length than that of pickup and theirlarge air gap (of up to 20 cm) may lead to large leakage flux.The resulting coupling coefficient may be lower than 10%.Methods have been proposed to improve the coupling withminimal ferrite volume and weight such as the adoption of afish-bone structure of a slim W-type primary core [18] [19].
Besides efficiency enhancement, research has focused onalleviating the positional alignment constraint between thepickup and the track conductors. A multi-phase pickup withboth vertical and horizontal wounded coils to capture mag-netic flux in both directions has been proposed to increasethe tolerance of lateral movement [20]. Alternatively, trackmodification such as the polyphase track configuration hasbeen employed to compensate the misalignment by producinga traveling magnetic wave [21]–[23]. The disadvantage of sucha system is the high cost and complexity of the power supplies,the fabrication and installation required for multiple phases,and the necessary measures needed to cope with the powerimbalance problem [24].
Besides the long loop track of the conventional RVIPTsystem, circular or rectangular magnetic structures whichareideal for stationary vehicles with tight alignment tolerancehave been studied [6], [7], [25], [26]. When such structures areused for roadway moving vehicles, a standard pickup may behalf over one primary segment and half over the next primarysegment. The actual power coupled can be zero unless thesegments have alternative poles [27], [28] or been excitedsequentially [29]. There is still lack of an effective design ofthe IPT transformer with consideration of the transformer trackdistance and the vehicle speed to suit various traffic conditions.
In this paper, a roadway vehicle IPT system (RVIPT) that
0000–0000/00$00.00c©2014 IEEE

2168-6777 (c) 2013 IEEE. Personal use is permitted, but republication/redistribution requires IEEE permission. Seehttp://www.ieee.org/publications_standards/publications/rights/index.html for more information.
This article has been accepted for publication in a future issue of this journal, but has not been fully edited. Content may change prior to final publication. Citation information: DOI10.1109/JESTPE.2014.2301460, IEEE Journal of Emerging and Selected Topics in Power Electronics
2 IEEE JOURNAL OF EMMERGING AND SELECTED TOPICS IN POWER ELECTRONICS, VOL.X, NO. X, MONTH 2014
Track
compensation
Full-bridge
inverter
Pickup side
Pickup
compensation
Track (primary side)
Filter
& load
Track length (DT)
Pickup side
Pickup side
Centrailized
power
station
L1
L2
I1
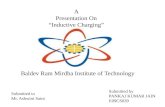
Fig. 1. A roadway charging system.
employs a series of sectional tracks is proposed. The sectionaltrack described in Section III will allow a smooth flux transi-tion when a vehicle is moving from one track to the next trackfor a smooth power transmission. Multiple sectional trackscan also be powered simultaneously to form effectively alonger track. The proposed sectional-track system is supportedby some existing enabling technologies. Multiple sequentialtrack sections can be powered by various distributed energygeneration systems such as the microgrid. The switching ofpower among multiple track sections is supported by vehiclespeed sensors [30]–[32] and an appropriate wireless feedbackarrangement [33]. The length of the sequentially excited tracksection will be optimized to improve the system efficiency forvarious vehicle speeds.
II. EFFICIENCY OFROADWAY VEHICLE IPT SYSTEM
A conventional roadway vehicle IPT system has the cou-pling structure depicted in Fig. 1. The RVIPT assumes onelong track with track lengthDT much longer than the lengthof a vehicle and a large centralized power station that powersall moving vehicles above the track [11], [20], [22], [34], [35].
A moving vehicle picks up powerPS from track currentI1,and the maximum power picked up is given by [36]
PS = ωI1M2
LS
QL (1)
whereω is the operating angular frequency of track currentI1, M is the mutual inductance betweenLP andLS of thetrack and pickup inductances, andQL is the quality factor ofthe system. Normally, secondary compensation is necessarytocreate a resonant tank with the pickup inductor. The secondarycompensation guarantees enough power to be received by thepickup. Similarly, a primary compensation is also essential toachieve a lower VA rating of the power supply [25].
The maximum achievable efficiencies of an IPT system us-ing secondary series and parallel compensation are comparable[37], [38]. We will use the secondary series compensated IPTsystem as an example to illustrate some essential consider-ations for maximizing system efficiency. Similar conclusioncan be obtained for the secondary parallel compensated IPTsystem.
For a secondary series compensated IPT system, the effi-ciency can be maximized by operating at a constant angularfrequencyωS = 1/(LSCS) and an optimized system qual-ity factor of QLs, whereCS is the secondary compensated
capacitor, i.e.,
ηmax =σ
(
1 +√1 + σ
)2 , (2)
QLs =QS√1 + σ
, and (3)
σ = k2QPQS , (4)
wherek = M/√LPLS is the coupling coefficient;QP and
QS are the quality factors of the primary and secondary coilsgiven as
QP =ωSLP
RP
, (5)
QS =ωSLS
RS
, (6)
with RP and RS being coil resistances. From (2), highefficiency can be achieved by maximizingσ = k2QPQS .Apparently, the quality factors in (5) and (6) increase withincreasing operating-frequencyωS . In practice, the quality fac-tors follow the approximate Dowell’s equation which is validfor frequencies much lower than the self-resonant frequencyof the inductor [38]. The quality factor peaks at a frequencymuch lower than the self-resonant frequency of the inductor.
Moreover, the upper bound of the operating frequency islimited by the power being transferred. For a power ratingsuitable for driving a EV, the operating frequency is usuallylimited below 140 kHz [39]. Besides, the pickup VA rating,which can be calculated asPout
√
1 +Q2Ls [36], poses an up-
per limit onQLs, since the VA rating essentially increases withthe operating frequency. At a high power rating and highQLs,arcing between the strands of the litz wire may be induced bythe associated high voltage stress [40]. Furthermore, increasingthe coil quality factor by increasing copper utilization isnota wise choice from the economic point of view.
Alternatively, the power transfer efficiency can be increasedby improving the coupling coefficientk of a single pickup ormaximizing the number of pickups [25] for a particular track.The conventional RVIPT system with a single long track hasobvious drawbacks under light traffic conditions such as atnight or in some remote areas. Since the length of the singlelong track is much larger than the pickup, the leakage fluxoccupies the majority of the total magnetic flux generated bythe track. The coupling coefficient or the system efficiency isinevitably low. Besides, the track current is usually controlledto stay constant in order to guarantee system stability [25],[36]. The conduction loss of the track is still high even ifthere is no vehicle moving over it.
A sectional-track RVIPT system is proposed in this paperto solve the problems associated with long tracks. The systemshown in Fig. 2 utilizes a series of sectional tracks, where thetrack lengthDT is a parameter to be optimized. Individualtracks can be turned on and off based on the number ofvehicles within the range, allowing optimum efficiency to beachieved for power transfer. Several tracks in sequence canbepowered together to form a longer optimized track to takeadvantage of more vehicle pickup coupling which will bedescribed in Section VII. Different sectional tracks can be

2168-6777 (c) 2013 IEEE. Personal use is permitted, but republication/redistribution requires IEEE permission. Seehttp://www.ieee.org/publications_standards/publications/rights/index.html for more information.
This article has been accepted for publication in a future issue of this journal, but has not been fully edited. Content may change prior to final publication. Citation information: DOI10.1109/JESTPE.2014.2301460, IEEE Journal of Emerging and Selected Topics in Power Electronics
ZHANG et al.: AN OPTIMIZED TRACK LENGTH IN ROADWAY INDUCTIVE POWER TRANSFER SYSTEMS 3
Track length
Photovoltaic energy
Fig. 2. Sectional-track roadway inductive power system forcharging electric vehicles.
allocated to different microgrid units to improve efficiency andsystem reliability.
III. SECTIONAL TRACKS AND PICKUPS
Bipolar and unipolar structures are usually adopted for thetrack in commercial applications [18], [20], [21], [23]. Thebipolar structure has the advantage of having a natural returnpath. The power received by pickups is provided by both thesending and returning tracks. The unipolar structure also hasa return path, which can be used for powering vehicles inanother lane. For a single lane motorway, the returning tracklines are distributed deep down and far enough from the centertrack in order to reduce electromagnetic interference withthecentral track, as shown in Fig. 3. However, the return line canbe used as the main track for a dual-lane motorway to improvecoupling and save cost. In this way, multilane motorway canbe implemented with several dual-lane tracks and at most onesingle lane track. Conceptually, adjacent sectional tracks canbe merged to form a longer sectional track along the motorway,as shown in Fig. 3 for single-lane and dual-lane motorways.This flexibility of merging sectional tracks will allow effectivetack length optimization by using a multiples of sectionaltracks.
The directions of usable flux of a single long track canbe horizontal or vertical, as shown in Fig. 4. The structureof the pickup should be designed to save space and to allowthe freedom of lateral movement. Consequently, the pickup isnormally designed to be flat [16], [18]. The vertical flux can becaptured by the flat-E structure of the pickup, within which thewindings are wounded horizontally, while the flat-bar structureis optimized to capture the horizontal flux [18].
The flat-E structure captures the vertical flux of bipolartracks. However, the vertical flux is maximized at the centerof the two tracks and is minimized above each of the tracks,leaving a tight tolerance in lateral alignment [21]. In contrast,
Cancel out
Single lane
Pickup
I1 I’1
Moving direction
Supply line
Returning line
Power
supply
(a)
Cancel out
Pickup
Pickup
I1
I’1
Fast lane
Slow lane
Moving direction
(b)
Fig. 3. Sectional track distribution in (a) single-lane, and (b) dual-lanemotorways.
the flat-bar pickup with a unipolar track has wider range oftolerance in lateral alignment.
In the subsequent sections, the flat-bar pickup is studiedin detail. We will focus our study on the track lengthDT
in relation to the power requirement, coupling coefficient,efficiency and converter design of a single sectional track.In this case, the conventional RVIPT can be regarded as alimited case of our proposed sectional-track RVIPT systemwith infinite track length, i.e.,DT → ∞.
It is expected that further technological enhancements tothe proposed sectional-track system would be needed to fulfillthe various requirements of roadway charging, which includedevelopment of polyphase tracks and quadrature pickup toenable freedom of movement as well as optimized magnetic

2168-6777 (c) 2013 IEEE. Personal use is permitted, but republication/redistribution requires IEEE permission. Seehttp://www.ieee.org/publications_standards/publications/rights/index.html for more information.
This article has been accepted for publication in a future issue of this journal, but has not been fully edited. Content may change prior to final publication. Citation information: DOI10.1109/JESTPE.2014.2301460, IEEE Journal of Emerging and Selected Topics in Power Electronics
4 IEEE JOURNAL OF EMMERGING AND SELECTED TOPICS IN POWER ELECTRONICS, VOL.X, NO. X, MONTH 2014
Flat-E Pickup
Track
Magnetic field
Track
(a)
Magnetic field
Track
Track
Flat-bar Pickup
(b)
Fig. 4. Pickup structures to capture the (a) vertical and (b)horizontal fluxgenerated by (a) bipolar and (b) unipolar tracks for a single-lane motorway.
TABLE ISELECTED PARAMETER VALUES FOR THE TWO-LANE , SINGLE
VEHICLE-CLASS MODEL, CALIBRATED TO TRAFFIC DATA FROM THE
DUTCH MOTORWAY A9 [42].
Parameter Slow lane Fast laneDesired velocity 105 km/h 123 km/hMaximum density 150 vehicles/km 150 vehicles/kmSafe time headway 1.7 s 1.2 s
structures to maximize power transfer and efficiency [26]–[28].
IV. V EHICLE SPEED AND POWER UTILIZATION
The proposed sectional-track infrastructure uses distributedpower sources whose overall power requirement is a naturaldesign parameter for efficiency optimization. The power re-quirement of a sectional track is a function of the numberof pickups coupled to the track. Based on a minimum safetyfollowing distance defined by the so-called “two-second-rule”,the number of moving vehicles supported in a sectional trackat a particular speed can be calculated [41]. In this paper,a more sophisticated model of macroscopic dynamics ofmulti-lane traffic is used [42], from which the equilibriumvelocity-density relationship of the multi-lane model usingthe parameters given in Table I can be derived as shown inFig. 51. Salient relations between the sectional-track lengthand the output requirement are shown in Fig. 6. From Fig. 6,the following observations can be made:
• The power requirement from the track output persectional-track length decreases with increasing speed ofvehicles moving above the track.
• The number of vehicles powered from a sectional trackdecreases dramatically with increasing vehicle speed.
• The sectional-track utilization is lower for higher vehiclespeed.
Although the above findings are targeted for sectional-trackinfrastructure, the results are also true for conventionalRVIPT.
1The variance prefactor in Fig. 5(a) allows direct empirical data fitting toan analytical function which is used to generate Fig. 5(b) [42].
0 20 40 60 800
0.01
0.02
0.03
0.04
0.05
0.06
Density (vehicle/km)
Var
iance
pre
fact
or
Slow lane
Fast lane
(a)
0 20 40 60 80 100 120 1400
20
40
60
80
100
120
140
Density (vehicle/km)
Aver
age
vel
oci
ty(k
m/h
)
Slow lane
Fast lane
(b)
Fig. 5. (a) Density-dependent variance prefactor and (b) equilibrium velocity-density relations of the multi-lane model for the parameter values specifiedin Table I.
Roadway charging is therefore suitable for low-speed urbanareas. However, sectional-track infrastructure has a definitiveadvantage due to the option of turning on or off a track sectiondepending on the amount of traffic within the sectional-trackarea. A track section located near a traffic light will be turnedon more frequently to improve the sectional track utilizationrate. This advantage will become more apparent when thecoupling efficiency is considered, as shown in the subsequentsections.
V. TRACK LENGTH AND EFFICIENCY
For simplicity of illustration, we consider the single-lanetraffic here, and ignore vehicle positioning during overtaking.
As mentioned in Section II, for RVIPT systems with fixed-size pickups, the system efficiency depends on the couplingcoefficientk and the quality factorQP of the track conductors.To investigate their relationship with the track sectionallength,a finite element analysis (FEA) simulation package (Ansoft3D) is used to simulate the operation.
Typical vehicles have a ground clearance between 150 and300 mm, depending on their actual sizes. The clearance willset a lower limit on the air gap of the primary track and thesecondary pickup. If an EV has an air gap of 150 mm tothe road, the track system in the road has to be covered by50 mm of bitumen, and the practical air gap is around 200mm. Pickup size of less than 1 m2 has been implemented

2168-6777 (c) 2013 IEEE. Personal use is permitted, but republication/redistribution requires IEEE permission. Seehttp://www.ieee.org/publications_standards/publications/rights/index.html for more information.
This article has been accepted for publication in a future issue of this journal, but has not been fully edited. Content may change prior to final publication. Citation information: DOI10.1109/JESTPE.2014.2301460, IEEE Journal of Emerging and Selected Topics in Power Electronics
ZHANG et al.: AN OPTIMIZED TRACK LENGTH IN ROADWAY INDUCTIVE POWER TRANSFER SYSTEMS 5
0
100
200
300
400
500
600
0 10 20 30 40 50 60
10km/h
30km/h
60km/h
100km/h
No. of vehicles
Tra
ck l
eng
th (
m)
(a)
0
100
200
300
400
500
600
0 10 20 30 40 50
10km/h
30km/h
60km/h
100km/h
No. of vehicles
Tra
ck l
eng
th (
m)
(b)
Fig. 6. Total number of vehicles on a sectional track for charging at differentvelocities of (a) slow lane and (b) fast lane.
to provide 2 kW [26] and 26.7 kW [28] power transferringthrough an air gap separation of 200 mm. A case study usingstandard test cycles for urban and highway driving conditionshas previously revealed that 40 kW per car is needed for alltraffic scenarios studied in order to avoid the use of batterypower [43].
As the focus in this section is on the optimization of thecoupling efficiency in relation to the track length for a singlepickup, a normalized relationship between the dimension ofthe pickup and the track length can be used and scaledaccordingly for practical use. It is noted that due to theexcessive dimensions of variables, the scaling is restricted tobe within the area of pickup and the track length. It is expectedthat a higher power than the existing pickup’s may be needed,and thus a slightly larger pickup area of 1.425 m2 is used. Apickup using ideal magnetic material with 20 turns of copperwindings is adopted. Its length, width and height are 1.25m, 1.14 m and 0.08 m, respectively, which are used in thesimulation.
The ideal magnetic material used in the simulation isferrite with infinite magnetic susceptibility and zero electricconductivity. In practice, optimization of magnetic structuresfor cost, weight and power should be performed [26]. The airgap between the pickup and the sectional track is 200 mm. Thetrack width is 2 m. An operating frequency offs = 200 kHzis used in the simulation. However, in actual implementation,the switching frequency should be adjusted to optimize thepower efficiency of the system. It has been shown that similarmagnetic structures can achieve similar efficiency values after
Track length
I1
Alignment distance
Moving direction1.14
1.25
0.08
I1/2
I1/2
2
Fig. 7. Physical configuration and dimensions (in meter) of pickup andsectional track used for FEA simulation.
Coup
ling c
oef
fici
ent
Track length (m)
(a)
Track length (m)
LP
(H
)
RP
(oh
m)
(b)
Fig. 8. (a) Coupling coefficient versus track length, and (b)track inductanceand track resistance of the sectional-track system shown inFig. 7 versus tracklength.
optimization for different power levels ranging from 2 W to5 kW [44]. Therefore, dimension scaling retains the samecoupling efficiency though alters the power capability [11],[22]. The three-dimensional configuration of the system isshown in Fig. 7.
The simulated results are shown in Fig. 8. A maximumk and a constantQP with increasing track length can beobserved. These results show the relative advantage of thesectional-track infrastructure over the conventional RVIPTfixed-track-length infrastructure, and thus the sectionaltracklength can be used to optimize the conversion efficiency.

2168-6777 (c) 2013 IEEE. Personal use is permitted, but republication/redistribution requires IEEE permission. Seehttp://www.ieee.org/publications_standards/publications/rights/index.html for more information.
This article has been accepted for publication in a future issue of this journal, but has not been fully edited. Content may change prior to final publication. Citation information: DOI10.1109/JESTPE.2014.2301460, IEEE Journal of Emerging and Selected Topics in Power Electronics
6 IEEE JOURNAL OF EMMERGING AND SELECTED TOPICS IN POWER ELECTRONICS, VOL.X, NO. X, MONTH 2014
VI. SECTIONAL EDGE CORRECTION
It is evident from Fig. 8 that the coupling coefficient startsto decrease when the sectional length is close to the lengthof the pickup. In practice, sectional track length longer thanthe length of the pickup can be easily designed. Therefore,sectional-track length longer than that of the pickup is assumedsubsequently.
However, the coupling coefficient will decrease when avehicle is entering or leaving a sectional track. Solid linesof Figs. 9 (a), (b) and (c) depict the FEA simulation results ofthe variation of coupling coefficient with alignment distancehaving track lengths of 7.5 m, 75 cm and 50 cm, respectively.The relationship between the alignment distance and the tracklength is shown in Fig. 7.
Comparison of Figs. 9 (a) and (b) indicates that the couplingcoefficient is unaffected by scaling. Such scaling allows eco-nomical experimental verification to be performed [21]–[23],as will be shown in Section IX. Comparison of Figs. 9 (b)and (c) indicates that the coupling coefficient starts to roll offat an alignment distance of about 15 cm for a pickup lengthof 12.5 cm and is independent of the track length. Thus, thetrack switching point is at an alignment distance of about 7.5cm for each sectional track.
An edge correction of the coupling coefficient versussectional-track length is shown in Fig. 10, where the maxi-mum k in Fig. 8 (a) is also shown for reference. The edgecorrected coupling coefficient at a particular track lengthiscalculated using the coupling coefficient averaged over theentire alignment distance of a sectional track. Upon averaging,the coupling coefficient is chosen from the previous track ifthealignment distance is smaller than thetrack switching point,as indicated in Fig. 9(c). Otherwise, it will be chosen from thecurrent sectional track.
The curve of the averagek has the same variation tendencyas that ofk before correction. However, when the track lengthis equivalent to the length of the pickup, the existence of edgeeffect results in a lower average value ofk since the edge areasoccupy considerable portion of the track length. The averagevalue ofk approachesk as the track length increases.
VII. M ULTIPLE PICKUPS
In practice, multiple vehicles move along a single sectionaltrack. The study of a pickup with our sectional-track systemistherefore extended to a multi-pickup system, where the numberof vehiclesn in a sectional track is limited by the vehiclespeed and sectional-track length, as depicted in Section IV.The circuit model for multiple secondary windings is shownin Fig. 11.
In our RVIPT system, all pickups are designed identical.The secondary impedances are identical for identical loadingconditions, and the total reflected impedance from all pickupsis
γ1Zr1 +
(n−1)∑
i=2
Zri + γnZrn = (γ1 + γ2 + n− 2)ω2M2
ZS
,
(7)
Alignment distance (m)
Co
up
lin
gco
effi
cien
t
(a)
Alignment distance (cm)
Co
up
lin
gco
effi
cien
t
(b)
Track switching point
Alignment distance (cm)
Coupli
ng
coef
fici
ent
(c)
Fig. 9. Variation ofk versus alignment distance. Simulated results are shownas solid lines in (a) 1:1 actual size with track length of 7.5 m,(b) 10:1 reducedsize with track length of 75 cm, and (c) track length of 50 cm. Thedata pointsindicated as squares are experimental measurements using the reduced sizeprototypes.
Coupli
ng c
oef
fici
ent
Track length (m)
Maximum k
Average k
Fig. 10. Edge corrected coupling coefficient indicted as “Averagek”. Maxi-mum coupling coefficient is also shown as “Maximumk” for comparison.

2168-6777 (c) 2013 IEEE. Personal use is permitted, but republication/redistribution requires IEEE permission. Seehttp://www.ieee.org/publications_standards/publications/rights/index.html for more information.
This article has been accepted for publication in a future issue of this journal, but has not been fully edited. Content may change prior to final publication. Citation information: DOI10.1109/JESTPE.2014.2301460, IEEE Journal of Emerging and Selected Topics in Power Electronics
ZHANG et al.: AN OPTIMIZED TRACK LENGTH IN ROADWAY INDUCTIVE POWER TRANSFER SYSTEMS 7
LM_n
L1_n L2_n
L2_nLM_n
L2_nLM_n
Fig. 11. Multiple secondary winding transformer model.
where 0 ≤ γ1 ≤ 1 and 0 ≤ γ2 ≤ 1 are edge correctionfactors for both ends of the sectional track as studied inSection VI. This is equivalent to the reflected impedance of asingle identical pickup with an equivalent mutual inductancegiven by
Mn =√mM, (8)
where (n − 2) ≤ m = (γ1 + γ2 + n − 2) ≤ n. Hence, theimprovement of coupling coefficientkn [25] is simply
kn =√mk, (9)
wherek is the coupling coefficient of a single pickup andm isa real number less than or equal ton, taking into considerationthe sectional edge correction.
To help understand the system, we define the equivalentlengthDv of a vehicle moving at a speedv as
Dv = DV +DS , (10)
whereDV is the length of the vehicle andDS is the resultantfollowing distance given by the result of Fig. 5. Three possiblecoupling scenarios can be identified as follows:
(a) DT > Dv, (11a)
(b) DT = Dv, and (11b)
(c) DT < Dv, (11c)
which correspond, respectively, to (a) the track being sharedwith maximum number of pickups, i.e.,n > 1; (b) the trackbeing occupied with exactly one vehicle, i.e.,n = 1; and (c)every vehicle being coupled with only one track while othertracks being inactive. In case (c), for each active track,n = 1.
Fig. 12 shows the edge corrected maximum coupling coef-ficient kn for case (a), i.e.,DT > Dv, where the sectional-track system has a maximum number of vehicles movingin accordance with the “multi-lane model” mentioned inSection IV. Also in the figure, the black dashed curve labeledwith “Averagek” corresponds to case (b) or (c) and shows theedge corrected coupling coefficient with one single vehicle.Points A, B, C and D are the crossing points of solid curves(case (a)) with the dashed black curve (case (c)).
For the solid curves in Fig. 12, corresponding to case (a), weobserve peaking ofkn for vehicle speeds 0 km/h and 3.6 km/hat a track length of about 10 m. If the vehicle speed increases
0.04
0.08
0.12
0.16
0.2
0.24
0 20 40 60 80 100Track length (m)
kn
0 km/h
3.6 km/h
18 km/h
36 km/h
Average k
A
B
C
D
k1
Fig. 12. Variation ofkn versus track length with maximum utilization ofvehicles moving at various speeds. The dotted curve labeled with “Averagek” indicates edge corrected coupling coefficient with one pickup. All curvescorrespond tokn with sectional edge correction as described in Section VI.
such that the crossing point is at a track length longer than 10m, e.g., points C and D, the peaking disappears, andkn staysnearly constant asDT increases further. This phenomenon canbe explained as follows. As the track length increases, theaveragek decreases as represented by the dashed curve inFig. 12, and
√n =
√
DT /Dv changes at a greater rate. Ifinitially the rate of increase of
√n is larger than the rate of
decrease ofk with the track length, a maximum ofkn canbe observed according to (9). Eventually, when the rate ofincrease of
√n is comparable to the rate of decrease ofk, kn
stays nearly constant.Essentially, the track length is optimal when peaking ofkn
occurs, or at a crossing point located on the dashed blackcurve in Fig. 12. In particular, for the dimension of vehiclesand track width used, the optimal sectional-track length peaksat a track length of about 10 m. In summary, the Importantobservations from Fig. 12 are as follows:
• For a fixed track length, the maximumkn decreasesrapidly with increasing vehicle velocityv.
• The curves ofkn shown are under the assumption ofmaximum utilization of sectional track, i.e.,n is at itsmaximum.
• The value ofn decreases with increasing vehicle velocityuntil n = 1 which marks a crossing point on the dottedblack curve, satisfying case (b). Any further increase invehicle velocity decreases the utilization of the sectionaltrack. Then, each sectional track hasn equal to either 1or 0. The coupling coefficient of each active track staysat the dotted black curve of “Averagek”.
It is noted that multiple pickups may have stability problemwhich can be solved by adding a decoupling controller in thepickup side [45], [46]. However, whenDT ≤ Dv, i.e., pickupsare powered independently, a regular control scheme can beused.
VIII. I MPLEMENTATION AND FURTHER CHALLENGE
A. Optimizing Sectional Track Length
According to the analysis presented in Section VII, twosectional-track lengthsDT,max1
andDT,max2can be chosen
to optimize the coupling coefficient. The first optimal tracklength isDT,max1
≈ 10 m, where a peaking ofkn at about

2168-6777 (c) 2013 IEEE. Personal use is permitted, but republication/redistribution requires IEEE permission. Seehttp://www.ieee.org/publications_standards/publications/rights/index.html for more information.
This article has been accepted for publication in a future issue of this journal, but has not been fully edited. Content may change prior to final publication. Citation information: DOI10.1109/JESTPE.2014.2301460, IEEE Journal of Emerging and Selected Topics in Power Electronics
8 IEEE JOURNAL OF EMMERGING AND SELECTED TOPICS IN POWER ELECTRONICS, VOL.X, NO. X, MONTH 2014
TABLE IICOMMON PARAMETERS OF THE SCALE-DOWN SECTIONAL TRACKS.
Primary number-of-turns 8Secondary number-of-turns 20Windings quality factor ≈ 20Width of primary and secondary windings 114 mmAir gap 20 mmSecondary winding inductance 113.31µHPower MOSFET (Q1-Q4) IRF540NSchottky diode (D1-D4) STPS20H100CG
TABLE IIIMEASURED PARAMETERS OF THE SCALE-DOWN SECTIONAL TRACKS.
Primary Track length (m) Inductance (µH) k
Track one 0.75 54.91 0.175Track two 0.50 38.55 0.208Track three 0.25 20.90 0.278
n = 3 is observed. This track length is suitable for the chargingof vehicles at stationary or very low speed traffic of less than3 km/h, such as the waiting regions near traffic lights, parkinglots, and waiting areas. The other optimal track length is atDT,max2
≈ 3 m, which is the peaking of the averaged couplingcoefficientk1 at n = 1. The benefits of using a track lengthat k1 are as follows.
1) The coupling coefficient stays at its maximum.2) The coupling coefficient is independent of the vehicle
speed.3) The design of the power converter and its control method
is more straightforward.Furthermore, as
DT,max1
DT,max2
≈ 3, the track lengthDT,max2can be
used as a basic building block, three of which can be integratedto form an effective system withDT,max1
.
B. Optimized Sectional Track Length Meeting Field LeakageRegulations
The optimal sectional track length discussed in Sec-tion VIII-A is ideal for roadways without passing pedestrians.In case there are pedestrians who occasionally break the trafficregulation and walk right on top of the energized primarytrack (at the position “Spot A” of Fig. 13), the track sectionmust be turned off by using a sensor system like the videosurveillance system with object detection algorithms [47].For the roadway area where high performance charging isnecessary with frequent human activities, the sectional-tracklengthDT can be designed equal to or shorter than the lengthof the pickup where the energized sectional tracks are coveredby vehicles.
A pedestrian, who is at a horizontal distance of 1750 mmfrom the nearest two excited sectional tracks at the position“Sport B” shown in Fig. 13, receives electromagnetic radiationfrom both the excited tracks. The worst-case radiation occurswhen currents in both tracks are equal to 100 A (about 30 kWwith 380 V input voltage and 80% efficiency) and there is nopickup above the tracks. The radiation can easily be shieldedby metal films on the road and on vehicles. Fig. 14 shows theelectromagnetic flux density shielded by a metal film on theroad and on vehicles, which is in compliance with the ICNIRPguidelines [48].
Vehicles on road
Spot B
Spot A
4.7m
1.7
m
Sectional
tracks
Fig. 13. Illustrated positions of “Spot A” and “Spot B” of a pedestrian crossingthe road.
Shielding on vehicle
Tracks
Pickup
Shielding on road
Road surface
Hu
man
hei
gh
t
Spot B
Spot B
(a)
0
3
6
9
12
0 30 60 90 120 150 180
kneesfeet groin
head
Mag
net
icst
ren
gth
(μT
)
height (cm)
Spot A
Spot B
(b)
Fig. 14. (a) Cross section of magnetic field distribution at different verticalpositions above “Spot B” of Fig. 13 shielded by metal films on road andon vehicles; (b) magnetic field strength at different height of a pedestrianstanding on “Spot A” and “Spot B”.
C. Further Challenge
The optimal track lengths obtained in this research canbe a good starting point for efficient RVIPT systems. In apractical implementation, misalignment of pickup with thetrack, air gap variation due to vertical vibration of vehicleand device parameter variation due to different operatingtemperatures may result in the variations ofk, resonant induc-tances and capacitances that the system necessitates variablefrequency tracking of the varying optimal operating frequency.The parameters variation should be minimized in the designphase. For any residue variation, the integration of pulse-widthmodulation and phase-lock loop [4] control method may bea solution forDT,max2
. The operating frequency tuning forsectional-track length ofDT,max1
may be integrated with thehigher level communication channel of the energy paymentsystem which takes logs of the amount of energy consumed indifferent geographical position and time of each vehicle. The

2168-6777 (c) 2013 IEEE. Personal use is permitted, but republication/redistribution requires IEEE permission. Seehttp://www.ieee.org/publications_standards/publications/rights/index.html for more information.
This article has been accepted for publication in a future issue of this journal, but has not been fully edited. Content may change prior to final publication. Citation information: DOI10.1109/JESTPE.2014.2301460, IEEE Journal of Emerging and Selected Topics in Power Electronics
ZHANG et al.: AN OPTIMIZED TRACK LENGTH IN ROADWAY INDUCTIVE POWER TRANSFER SYSTEMS 9
TABLE IVMEASURED AND ESTIMATED COUPLING COEFFICIENTS OF MULTIPLE PICKUPS. ALL INDUCTANCES SHOWN ARE INµH.
Number of pickups LP L1 LM LS L2 k kn
1 55.48 41.30 14.18 110.64 100.17 0.179 -
2 57.25 27.7413.95 111.02 100.38 0.175
0.24713.87 111.10 100.53 0.174
3 59.13 18.2413.74 110.50 100.00 0.170
0.29213.50 110.82 100.51 0.16713.63 111.56 101.11 0.168
(a)
vin
Q1
Q3
Q2
Q4
CP CS
LP LS
M
D1
D3
D2
D4
Cf RO
(b)
vin
i1
(c)
Fig. 15. (a) Experimental prototype for verifying the efficiency trend withrespect to track length; (b) circuit diagram; and (c) input switching voltageand current waveforms of the compensation technique.
amount of vehicle above a sectional track ofDT,max1should
be well detected from such system that proper operating fre-quency can be selected for initial resonant frequency locking.Such payment system can easily detect non-electric vehicleorunregistered electric vehicles such that the track underneathcan be turned off. In case a constant frequency operation ismore desirable, an operating frequencyωO taking into account
0.7
0.73
0.76
0.79
0.82
0.85
Eff
icie
ncy
1 2.5 4 5.5 7 8.5 10Track distance (m)
(a)
10 25 40 55 70 85 100
Track distance (cm)
0.7
0.73
0.76
0.79
0.82
0.85
Eff
icie
ncy
0.746
(QO=3.1)
0.810
(QO=2.2)
0.773
(QO=2.6)
(b)
Fig. 16. (a) Calculated efficiency of track with practical size; and (b)calculated and measured efficiencies of 10-fold scale-down tracks.
of all physical variations can be optimally selected. Takefor instance, ifωH in [4] is the desired optimal operatingfrequency,ωO can selected to be the maximum of the varyingωH for all specific conditions.
IX. EXPERIMENTAL EVALUATION
An experimental 10:1 scale-down prototype of the proposedsectional-track RVIPT system, as shown in Fig. 15 (a), hasbeen constructed. Also, Fig. 15 (b) shows the circuit and (c)depicts the input switching voltage and current waveformsof the compensation technique. Series compensation for bothprimary and secondary windings has been selected in ourexperiment. Since the track loading is purely resistive, thereis no additional VAR on the track when loading changes.
Tables II and III give the parameters measured from theprototype. Table IV gives the parameters for the case ofmultiple pickups (three pickups in particular). The efficienciesare calculated with practical track length up to 10 m as shownin Fig. 16 (a) and with the 10:1 scale-down prototype asshown in Fig. 16 (b). The measured efficiencies as indicatedby triangle data points are shown in Fig. 16 (b) which confirmthe analytical results.

2168-6777 (c) 2013 IEEE. Personal use is permitted, but republication/redistribution requires IEEE permission. Seehttp://www.ieee.org/publications_standards/publications/rights/index.html for more information.
This article has been accepted for publication in a future issue of this journal, but has not been fully edited. Content may change prior to final publication. Citation information: DOI10.1109/JESTPE.2014.2301460, IEEE Journal of Emerging and Selected Topics in Power Electronics
10 IEEE JOURNAL OF EMMERGING AND SELECTED TOPICS IN POWER ELECTRONICS, VOL.X, NO. X, MONTH 2014
The measured coupling coefficients versus the alignmentdistance are shown as squares in Fig. 9 (b) for track lengthof 75 cm, and Fig. 9 (c) for track length of 50 cm. The datapoints measured are in excellent agreement with calculatedresults by FEA software.
Table IV gives the measured coupling coefficients in columnk with one, two and three pickups. Also shown in the tableis an extra columnkn which gives the estimation ofkn using(9) of Section VII for two and three pickups. Results showexcellent agreement with the measured values ofk.
X. CONCLUSION
An infrastructure of sectional-track inductive power transfersystems for moving vehicles is proposed and studied. Max-imum coupling power efficiency between the primary trackand the pickup can be achieved by varying the sectional-tracklength. Two optimal sectional-track lengths can be identified.One corresponds to a high coupling coefficient for slowmoving or stationary vehicle application, the other correspondsto a relatively low coupling coefficient suitable for all vehiclespeeds. The analytical results are verified by measurementfrom a scale-down experimental prototype.
REFERENCES
[1] X. Liu and S. Y. R. Hui, “Equivalent circuit modeling of a multilayerplanar winding array structure for use in a universal contactless batterycharging platform,”IEEE Trans. Power Electronics, vol. 22, no. 1, pp.21–29, Jul. 2007.
[2] E. Waffenschmidt and T. Staring, “Limitation of inductivepower transferfor consumer applications,” inProc. IEEE Conf. Power Electronics andApplications, Sep. 2009, pp. 1–10.
[3] X. Liu and S. Y. R. Hui, “Simulation study and experimental verificationof a universal contactless battery charging platform with localizedcharging features,”IEEE Trans. Power Electronics, vol.26, no. 6, pp.2202–2210, Nov. 2007.
[4] Q. Chen, S. C. Wong, C. K. Tse, and X. Ruan, “Analysis, design, andcontrol of a transcutaneous power regulator for artificial hearts,” IEEETrans. Biomedical Circuits and Systems, vol.3, no. 1, pp. 23–31, Feb.2009.
[5] F. Sato, T. Nomoto, G. Kano, H. Matsuki, and T. Sato, “A newcontactless power-signal transmission device for implantedfunctionalelectrical stimulation (FES),”IEEE Trans. Magnetics, vol.40, no. 4, pp.2964–2966, Jul. 2004.
[6] J. L. Villa, A. Llombart, J. F. Sanz, and J. Sallan, “Practical developmentof a 5 kW ICPT system SS compensated with a large air gap,”IEEEInternational Symposium on Industrial Electronics, Jun. 2007, pp. 1219–1223.
[7] J. Sallan, J. L. Villa, A. Llombart, and J. F. Sanz, “Optimal design ofICPT systems applied to electric vehicle battery charge,”IEEE Trans.Industrial Electronics, vol. 56, no. 6, pp. 2140–2149, Jun. 2009.
[8] J. Kim, J. Kim, S. Kong, H. Kim, I. Suh, N. P. Suh, D. H. Cho, J. Kim,and S. Ahn, ”Coil design and shielding methods for a magnetic resonantwireless power transfer system”Proceedings of the IEEE , vol. 101, no.6, pp. 1332–1342, Jun. 2013.
[9] J. de Boeij, E. A. Lomonova, and A. J. A. Vandenput, ”Optimization ofcontactless planar actuator with manipulator,”IEEE Trans. Magnetics,vol. 44, no. 6, pp. 1118–1121, Jun. 2008.
[10] G. Gamboa, C. Hamilton, R. Kerley, S. Elmes, A. Arias, J. Shen, andI. Batarseh, “Control strategy of a multi-port, grid connected, direct-dc PV charging station for plug-in electric vehicles,” inIEEE EnergyConversion Congress and Exposition, Sep. 2010, pp. 1173–1177.
[11] M. L. G. Kissin, G. A. Covic, and J. T. Boys, “Estimating theoutput power of flat pickups in complex IPT systems,” inIEEE PowerElectronics Specialists Conference, Jun. 2008, pp. 604–610.
[12] S. Lee and B. Choi, and C. T. Rim, “Dynamics characterization of theinductive power transfer system for online electric vehicles by Laplacephasor transform ,”IEEE Trans. Power Electronics, vol. 28, no. 12, pp.5902–5909, Dec. 2013.
[13] J. T. Boys, G. A. Covic, and A. W. Green, “Stability and control ofinductively coupled power transfer systems,” inIEEE Proc. ElectricPower Applications, Jan. 2000, pp. 37–43.
[14] S. Jung, H. Lee, C. S. Song, J. H. Han, W. K. Han, and G. Jang, “Optimaloperation plan of the online electric vehicle system through establish-ment of a DC distribution system,”IEEE Trans. Power Electronics, vol.28, no. 12, pp. 5878–5889, Dec. 2013.
[15] G. A. J. Elliott, G. A. Covic, D. Kacprzak, and J. T. Boys,“A newconcept: asymmetrical pick-ups for inductively coupled power transfermonorail systems,”IEEE Trans. Magnetics, vol.42, no. 10, pp. 3389–3391, Oct. 2006.
[16] G. A. Covic, G. Elliott, O. H. Stielau, R. M. Green, and J.T. Boys,“The design of a contact-less energy transfer system for a people moversystem,” inInt. Conf. Power Syst. Technol., Dec. 2000, pp. 79–84.
[17] M. Hutin and M. Leblanc, ”Transformer system for electric railways,”U.S. Patent 527, 857, 1894.
[18] S. Lee, J. Huh, C. Park, N. S. Choi, G. H. Cho, and C. T. Rim, “On-lineelectric vehicle using inductive power transfer system,” inIEEE EnergyConversion Congress and Exposition, Sept. 2010, pp. 1598–1601.
[19] J. Shin, S. Y. Shin, Y. Kim, S. Y. Ahn, S. Lee, G. Jung, S. J. Jeon andD. H. Cho, “Design and implementation of shaped magnetic-resonance-based wireless power transfer system for roadway-powered movingelectric vehicle,”IEEE Trans. Industrial Electronics, vol. 61, no. 3, pp.1179–1192, Mar. 2014.
[20] G. A. J. Elliott, S. Raabe, Gr. A. Covic, and J. T. Boys, “Multiphasepickups for large lateral tolerance contactless power-transfer systems,”IEEE Trans. Industrial Electronics, vol. 57, no. 5, pp. 1590–1598, May2010.
[21] G. A. Covic, J. T. Boys, M. L. G. Kissin, and H. G. Lu, “A three-phaseinductive power transfer system for roadway-powered vehicles,” IEEETrans. Industrial Electronics, vol. 54, no. 6, pp. 3370–3377, Dec. 2007.
[22] M. L. G. Kissin, J. T. Boys, and G. A. Covic, “Interphase mutualinductance in polyphase inductive power transfer systems,”IEEE Trans.Industrial Electronics, vol. 56, no. 7, pp. 2393–2400, Jul. 2009.
[23] M. L. G. Kissin, G. A. Covic, and J. T. Boys, “Steady-state flat-pickuploading effects in polyphase inductive power transfer systems,” IEEETrans. Industrial Electronics, vol. 58, no. 6, pp. 2274–2282, Jun. 2011.
[24] S. Raabe and G. A. Covic, ”Practical design considerations for con-tactless power transfer quadrature pick-ups,”IEEE Trans. IndustrialElectronics, vol. 60, no. 1, pp. 400–409, Jan. 2013.
[25] C. S. Wang, O. Stielau, and G. A. Covic, ”Design considerations fora contactless electric vehicle battery charger,”IEEE Trans. IndustrialElectronics, vol. 52, no. 5, pp. 1308–1314, Oct. 2005.
[26] M. Budhia, G. A. Covic, and J. T. Boys, “Design and optimizationof circular magnetic structures for lumped inductive power transfersystems,”IEEE Trans. Power Electronics, vol. 26, no. 11, pp. 3096–3108, Nov. 2011.
[27] S. Lee, W. Lee, J. Huh, H. J. Kim, C. Park, G. H. Cho and C.T. Rim, “Active EMF cancellation method for I-type pickup of on-line electric vehicles,” inTwenty-Sixth Annual IEEE Applied PowerElectronics Conference and Exposition (APEC), 2011, pp. 1980–1983.
[28] J. Huh, W. Lee, G. H. Cho, B. Lee, and C. K. Rim, “Characterization ofnovel inductive power transfer systems for on-line electricvehicles,” inTwenty-Sixth Annual IEEE Applied Power Electronics Conference andExposition (APEC), 2011, pp. 1975–1979.
[29] J. G. Bolger, “Roadway power and control system for inductivelycoupled transportation system,” U.S. Patent 4,836,344, issued Jun. 6,1989.
[30] T. T. Nguyen, X. D. Pham, J. H. Song, S. Jin, D. Kim, and J. W.Jeon, “Compensating background for noise due to camera vibration inuncalibrated-camera-based vehicle speed measurement system,” IEEETrans. Vehicular Technology, vol.60, no. 1, pp. 30–43, Jan. 2011.
[31] T. X. Mei and H. Li, “Measurement of absolute vehicle speed with asimplified inverse model,”IEEE Trans. Vehicular Technology, vol.59,no. 3, pp. 1164–1171, March 2010.
[32] Y. K. Ki and D. K. Baik, “Model for accurate speed measurement usingdouble-loop detectors,”IEEE Trans. Vehicular Technology, vol.55, no.4, pp. 1094–1101, July 2006.
[33] M. W. Baker and R. Sarpeshkar, “Feedback analysis and design of RFpower links for low-power bionic systems,”IEEE Trans. BiomedicalCircuits Systems, vol. 1, no. 1, pp. 28–38, March 2007.
[34] M. L. G. Kissin, H. Hao, and G. A. Covic, “A practical multiphase IPTsystem for AGV and roadway applications,” inIEEE Energy ConversionCongress and Exposition, Sept. 2010, pp. 1844–1850.
[35] S. Raabe, G. A. J Elliott, G. A. Covic, and J. T. Boys, “A quadraturepickup for inductive power transfer systems,” in2nd IEEE Conferenceon Industrial Electronics and Applications, May, 2007, pp. 68–73.

2168-6777 (c) 2013 IEEE. Personal use is permitted, but republication/redistribution requires IEEE permission. Seehttp://www.ieee.org/publications_standards/publications/rights/index.html for more information.
This article has been accepted for publication in a future issue of this journal, but has not been fully edited. Content may change prior to final publication. Citation information: DOI10.1109/JESTPE.2014.2301460, IEEE Journal of Emerging and Selected Topics in Power Electronics
ZHANG et al.: AN OPTIMIZED TRACK LENGTH IN ROADWAY INDUCTIVE POWER TRANSFER SYSTEMS 11
[36] G. A. Covic and J. T. Boys, “Modern trends in inductive power transferfor transportation applications,”IEEE Trans. Emerging and SelectedTopics in Power Electronics, vol. 1, no. 1, pp. 28–41, Mar. 2013.
[37] W. Zhang, S. C. Wong, C. K. Tse, and Q. Chen, “Design for efficiencyoptimization and voltage controllability of series-seriescompensatedinductive power transfer systems,”IEEE Trans. Power Electronics, vol.29, no. 1, pp. 191–200, Jan. 2014.
[38] W. Zhang, S. C. Wong, C. K. Tse, and Q. Chen, “Analysis andcom-parison of secondary series and parallel compensated inductive powertransfer systems operating for optimal efficiency and load-independentvoltage transfer ratio,”IEEE Trans. Power Electronics, to appear.
[39] G. A. Covic and J. T. Boys, “Inductive power transfer,”Proceedings ofthe IEEE vol. 101, no. 6, pp. 1276–1289, Jun. 2013.
[40] J. Garnica, R. A. Chinga, and J. Lin, “Wireless power transmission:from far field to near field,”Proceedings of the IEEE vol. 101, no. 6,pp. 1321–1331, Jun. 2013.
[41] W. Zhang, S. C. Wong, C. K. Tse, and Q. Chen, “A study of sectionaltracks in roadway inductive power transfer system,” inIEEE EnergyConversion Congress and Expo. (ECCE), 2011, pp. 822–826.
[42] V. Shvetsov and D. Helbing, “Macroscopic dynamics of multilanetraffic,” Physical Review E, vol. 59, issue 6, pp. 6328–6339,Jun. 1999.
[43] S. Chopra and P. Bauer, “Driving range extension of EV with on-road contactless power transfer – a case study,”IEEE Trans. IndustrialElectronics, to appear.
[44] D. A. G. Pedder, A. D. Brown, and J. A. Skinner, “A contactless elec-trical energy transmission system,”IEEE Trans. Industrial Electronics,vol. 46, no. 1, pp. 23–30, Feb. 1999.
[45] N. A. Keeling, G. A. Covic, and J. T. Boys, “A unity-power-factor IPTpick-up for high-power applications,”IEEE Trans. Industrial Electron-ics, vol. 57, no. 2, pp. 744–751, Feb. 2010.
[46] J. T. Boys, G. A. Covic, and Y. X. Xu, “DC analysis technique forinductive power transfer pick-ups,”IEEE Power Electronics letters, vol.1, no. 2, pp. 51–53, Jun. 2003.
[47] M. D. Breitenstein, F. Reichlin, B. Leibe, E. Koller-Meier, and L.V. Gool, “Online multiperson tracking-by-detection from a single,uncalibrated camera,”IEEE Trans. on Pattern Analysis and MachineIntelligence, vol. 33, no. 9, pp. 1820–1833, Sept. 2011.
[48] IEEE Standard for Safety Levels With Respect to Human Exposure toRadio Frequency Electromagnetic Fields 3kHz to 300GHz, IEEE Std.,2006.
Wei Zhang (S’11) received the BSc degree in elec-trical engineering from HeFei University of Technol-ogy, Hefei, China in 2007, and the MSc degree fromNanjing University of Aeronautics and Astronautics,Nanjing, China in 2010. He is currently workingtoward the Ph.D. degree in power electronics at theHong Kong Polytechnic University, Kowloon, HongKong.
His current research interests include inductivepower transfer system and resonant converters.
Siu-Chung Wong (M’01–SM’09) received the BScdegree in Physics from the University of Hong Kong,Hong Kong, in 1986, the MPhil degree in electron-ics from the Chinese University of Hong Kong in1989, and the PhD degree from the University ofSouthampton, U.K., in 1997.
Dr. Wong joined the Hong Kong Polytechnic in1988 as an Assistant Lecturer. He is currently anAssociate Professor of the Department of Electronicand Information Engineering, The Hong Kong Poly-technic University, where he conducts research in
power electronics. Dr. Wong is a senior member of the IEEE and a memberof the Electrical College, The Institution of Engineers, Australia. He is aneditor of theEnergy and Power Engineering Journal and a member of theEditorial Board of theJournal of Electrical and Control Engineering.
In 2012, Dr Wong was appointed as a Chutian Scholar Chair Professor bythe Hubei Provincial Department of Education, China and the appointmentwas hosted by Wuhan University of Science and Technology, Wuhan, China.In 2013, Dr Wong was appointed as Guest Professor by the School ofElectrical Engineering, Southeast University, Nanjing, China. He was avisiting scholar at the Center for Power Electronics Systems, Virginia Tech,VA, USA on November 2008, Aero-Power Sci-tech Center, Nanjing Universityof Aeronautics and Astronautics, Nanjing, China on January2009, and Schoolof Electrical Engineering, Southeast University, Nanjing, China on March2012.
Chi K. Tse (M’90–SM’97–F’06) received the BEng(Hons) degree with first class honors in electricalengineering and the PhD degree from the Universityof Melbourne, Australia, in 1987 and 1991, respec-tively.
He is presently Chair Professor of Electronic En-gineering at the Hong Kong Polytechnic University,Hong Kong. From 2005 to 2012, he was the Headof Department of Electronic and Information Engi-neering at the same university. His research interestsinclude complex network applications, power elec-
tronics and chaos-based communications. He is the author of the booksLinearCircuit Analysis (London: Addison-Wesley, 1998) andComplex Behavior ofSwitching Power Converters (Boca Raton: CRC Press, 2003), co-author ofChaos-Based Digital Communication Systems (Heidelberg: Springer-Verlag,2003), Digital Communications with Chaos (London: Elsevier, 2006),Re-construction of Chaotic Signals with Applications to Chaos-Based Commu-nications (Singapore: World Scientific, 2007) andSliding Mode Control ofSwitching Power Converters: Techniques and Implementation (Roca Raton:CRC Press, 2012) and co-holder of 5 US patents and 2 other pending patents.
Currently Dr. Tse serves as Editor-in-Chief for theIEEE Circuits andSystems Magazine and Editor-in-Chief ofIEEE Circuits and Systems SocietyNewsletter. He was/is an Associate Editor for the IEEE TRANSACTIONS ON
CIRCUITS AND SYSTEMS PART I—FUNDAMENTAL THEORY AND APPLI-CATIONS from 1999 to 2001 and again from 2007 to 2009. He has also beenan Associate Editor for the IEEE TRANSACTIONSON POWERELECTRONICS
since 1999. He is on the Editorial Board of theInternational Journal ofCircuit Theory and Applications and International Journal and Bifurcationand Chaos.
Dr. Tse received the L.R. East Prize from the Institution of Engineers,Australia, in 1987, the Best Paper Award from IEEE TRANSACTIONS ON
POWER ELECTRONICS in 2001 and the Best Paper Award fromInternationalJournal of Circuit Theory and Applications in 2003. In 2005 and 2011,he was selected and appointed as IEEE Distinguished Lecturer. In 2007,he was awarded the Distinguished International Research Fellowship by theUniversity of Calgary, Canada. In 2009 and 2013, he and his co-inventorswon the Gold Medal at the International Exhibition of Inventions of Geneva,Switzerland, on LED lighting technologies. In 2011, he was appointedHonorary Professor by RMIT University, Melbourne, Australia. In 2013, hewas awarded the Gledden Fellowship by the University of Western Australia,Perth, Australia.

2168-6777 (c) 2013 IEEE. Personal use is permitted, but republication/redistribution requires IEEE permission. Seehttp://www.ieee.org/publications_standards/publications/rights/index.html for more information.
This article has been accepted for publication in a future issue of this journal, but has not been fully edited. Content may change prior to final publication. Citation information: DOI10.1109/JESTPE.2014.2301460, IEEE Journal of Emerging and Selected Topics in Power Electronics
12 IEEE JOURNAL OF EMMERGING AND SELECTED TOPICS IN POWER ELECTRONICS, VOL.X, NO. X, MONTH 2014
Qianhong Chen (M’06) was born in HubeiProvince, China, in 1974. She received the B.S.,M.S., and Ph.D. degrees in electrical engineeringfrom Nanjing University of Aeronautics and Astro-nautics, Nanjing, China, in 1995, 1998 and 2001,respectively.
In 2001, she joined the Teaching and ResearchDivision of the Faculty of Electrical Engineering atNanjing University of Aeronautics and Astronautics,China, and is currently a professor with the Aero-Power Sci-Tech Center in the College of Automation
Engineering. From April 2007 to January 2008, she was a research associatein the Department of Electronic and Information Engineering,Hong KongPolytechnic University, Hong Kong, China. Her research interests includeapplication of integrated-magnetics, inductive power transfer converters, soft-switching dc/dc converters, power factor correction, and converter modeling.She has published over 40 papers in international journals and conferences,and is the holder of 7 patents.