
Dept. of Urology, Jahn Ferenc South-Pest Teaching Hospital, Budapest, Hungary Sandor Lovasz MD. PhD.
Upload
clyde-dawsonCategory
view
217download
1
An Algorithmic Proof of the Lopsided Lovasz Local
Lemma
Nick Harvey University of British Columbia
Jan VondrakIBM Almaden

• Let E1,E2,…,En be events in a discrete probability space.
• Let G be a graph on {1,…,n}.Let ¡(i) be neighbors of i, and let ¡+(i) = ¡(i) [ {i}.
• G is called a dependency graph if, for all i,Ei is jointly independent of { Ej : j¡+(i) }.
• Erdos-Lovasz ‘75: Suppose |¡+(i)|· d and P[Ei] · p 8i.If ped· 1 then P[Åi Ei
c] ¸ (1-1/d)n.
Lovasz Local Lemma
E1
E2
E3
E4
E.g., Pairwise Independent Events

Example: k-SAT• Let Á be a k-SAT formula• Pick a uniformly random assignment to the
variables.• Let Ei be the event clause i is unsatisfied. Note
P[Ei]=2-k=p.
• Suppose that each variable appears in 2k/ek clauses.
• Dependency graph: |¡+(i)|· 2k/e = d.• Eg:
• Since ped· 1, LLL implies P[Åi Eic]>0, so Á is
satisfiable.
E1
Clause 1 unsatisfiedE2
Clause 2 unsatisfied
E3
Clause 3 unsatisfiedE4
Clause 4 unsatisfied
Á = (x1Çx2Çx3) Æ (x1Çx4Çx5) Æ (x4Çx5Çx6) Æ
(x2Çx3Çx6)

Stronger forms of LLL
• Symmetric LLL: P[Ei] · 1/(e¢maxj |¡+
(j)|) 8i.• Asymmetric LLL: j2¡+(i) P[Ej] · 1/4
8i.• General LLL: 9 x1,...,xn 2 (0,1)
such thatP[Ei] · xi ¢ j2¡(i) (1-xj) 8i.
• Symmetric LLL: P[Ei] · 1/(e¢maxj |¡+
(j)|) 8i.• Asymmetric LLL: j2¡+(i) P[Ej] · 1/4
8i.• General LLL: 9 y1,...,yn > 0 such
thatP[Ei] · yi / j2¡+(i) (1+yj) 8i.
Stronger forms of LLL

• Symmetric LLL: P[Ei] · 1/(e¢maxj |¡+
(j)|) 8i.• Asymmetric LLL: j2¡+(i) P[Ej] · 1/4
8i.• General LLL: 9 y1,...,yn > 0 such
thatP[Ei] · yi / Jµ¡+(i) yJ 8i.
where yJ = j2J yj.
• Let Ind be the independent sets of the dependency graph.
• Cluster Expansion: 9 y1,...,yn > 0 such that
P[Ei] · yi / Jµ¡+(i) yJ 8i.
J 2 Ind
Stronger forms of LLL

• Let Ind be the independent sets of the dependency graph.
• Let pi = P[Ei].
• For SµV, let
• Shearer ‘85: If qI>0 8I2Ind then P[Åi Eic]
¸ q; > 0.Moreover, for every dependency graph, this is theoptimal criterion under which the LLL is true.
“multivariateindependencepolynomial”
Stronger forms of LLL

Algorithmic Results• LLL gives a non-constructive proof that
Åi Eic ;.
• Can we efficiently find a point in that set?
• Long history:Beck ‘91, Alon ‘91, Molloy-Reed ‘98, Czumaj-Scheideler ‘00, Srinivasan ‘08
• Can find a satisfying assignment for k-SAT instanceswhere each variable appears in · 2k/7 clauses.

Algorithmic Results• Efficiently finding a point in Åi Ei
c.
• Moser-Tardos ‘10: Algorithm for General LLL in “variable model”.– Probability space has product distribution
on variables.– Each events is a function of some subset
of the variables.– Dependency graph connects events that
share variables.
• Many extensions: (but still in variable model)
– Cluster Expansion criterion [Pegden ‘13]– Shearer’s criterion [Kolipaka-Szegedy
‘11]

Algorithmic Results• Efficiently finding a point in Åi Ei
c.
• Moser-Tardos ‘10: Algorithm for General LLL in “variable model”.– Probability space has product distribution
on variables.– Each events is a function of some subset
of the variables.– Dependency graph connects events that
share variables.
• Many extensions in other directions– Derandomization [Chandrasekaran et al.
‘10]– Exponentially many events [Haeupler,
Saha, Srinivasan ‘10]– Column-sparse IPs [Harris, Srinivasan
‘13]– Distributed algorithms [Chung, Pettie, Su
‘14]

Extending LLL Beyond Dependency Graphs
• The definition of a dependency graph is equivalent to
P[Ei | Åj2J Ejc ] = P[Ei] 8J µ [n]n¡+(i).
• Define a lopsidependency graph to be one satisfying
P[Ei | Åj2J Ejc ] · P[Ei] 8J µ [n]n¡+(i).
• Intuitively, edges between events that are “negatively dependent”
• (Easy) Theorem: (Erdos-Spencer ‘91) All existential forms of the LLL remain true with lopsidependency graphs.
J = any set of non-neighbors

Extending LLL Beyond Dependency Graphs
• The definition of a dependency graph is equivalent to
P[Ei | Åj2J Ejc ] = P[Ei] 8J µ [n]n¡+(i).
• Define a lopsidependency graph to be one satisfying
P[Ei | Åj2J Ejc ] · P[Ei] 8J µ [n]n¡+(i).
• Intuitively, edges between events that are “negatively dependent”
• Eg: Let ¼ be a permutation on {1,2}.Let E1 be “¼(1)=1” and E2 be “¼(2)=2”.Then P[E1 | E2
c ] = 0 < 1/2 = P[E1 ].
J = any set of non-neighbors
E1 and E2 are “positively
dependent”

Extending LLL Beyond Dependency Graphs
• The definition of a dependency graph is equivalent to
P[Ei | Åj2J Ejc ] = P[Ei] 8J µ [n]n¡+(i).
• Define a lopsidependency graph to be one satisfying
P[Ei | Åj2J Ejc ] · P[Ei] 8J µ [n]n¡+(i).
• Intuitively, edges between events that are “negatively dependent”
• Eg: Let ¼ be permutation on [n]. [Erdos-Spencer ‘91, Harris-Srinivasan ‘14]Let Ei be “¼(ai)=bi”.Add edges between Ei and Ej if ai=aj or bi=bj.
J = any set of non-neighbors

• Define a lopsidependency graph to be one satisfying
P[Ei | Åj2J Ejc ] · P[Ei] 8J µ [n]n¡+(i).
• Definition: A lopsided association graph is a graph where
P[Ei |F ] ¸ P[Ei] 8F2Fi,where Fi contains all monotone functions of { Ei :
j¡+(i) }.
• Easy: Lopsided association ) Lopsidependency.
• Analogous to “negative association” vs “negative cylinder dependent”
Lopsided Association

• Define a lopsidependency graph to be one satisfying
P[Ei | Åj2J Ejc ] · P[Ei] 8J µ [n]n¡+(i).
• Definition: A lopsided association graph is a graph where
P[Ei |F ] ¸ P[Ei] 8F2Fi,where Fi contains all monotone functions of { Ei :
j¡+(i) }.
• Easy: Lopsided association ) Lopsidependency.
• Main Result: For every probability space with a lopsided association graph, all existential forms of LLL have an algorithmic proof.
Lopsided Association
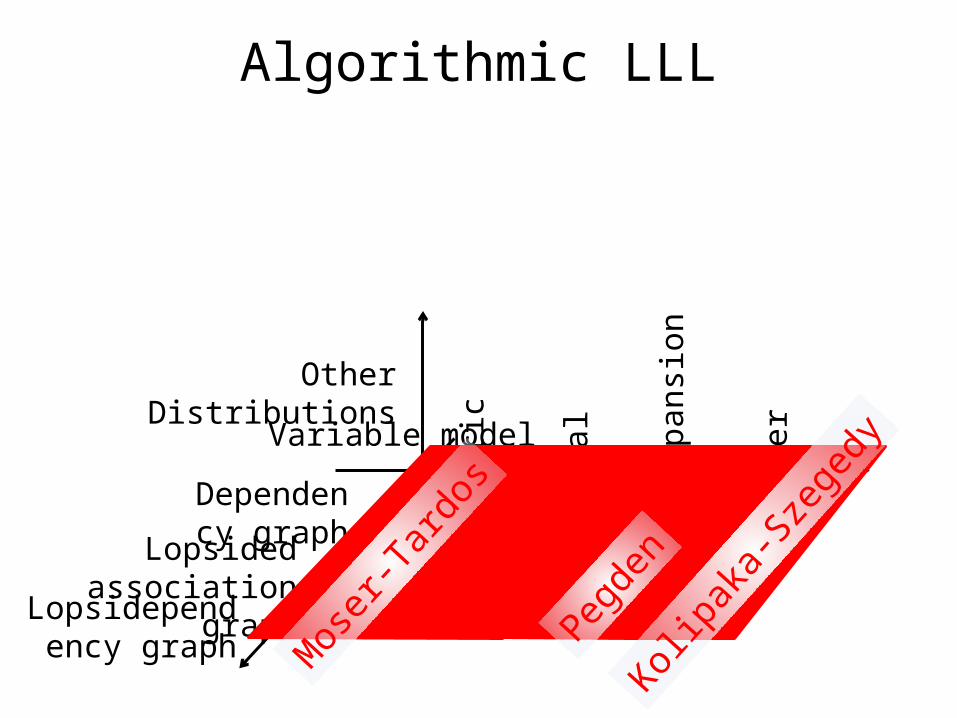
Algorithmic LLL
Sym
metr
ic
Gen
era
l
Clu
ster
Exp
an
sion
Sheare
rVariable model
Dependency graphLopsided
association graphLopsidepend
ency graph Mos
er-Ta
rdos
Pegd
enKo
lipak
a-Sz
eged
y
Other Distributions
Sym
metr
ic
Gen
era
l
Clu
ster
Exp
an
sion
Sheare
rVariable model
Dependency graphLopsided
association graphLopsidepend
ency graph Mos
er-Ta
rdos
Pegd
enKo
lipak
a-Sz
eged
y
Permutations
Harris
-Srin
ivas
an
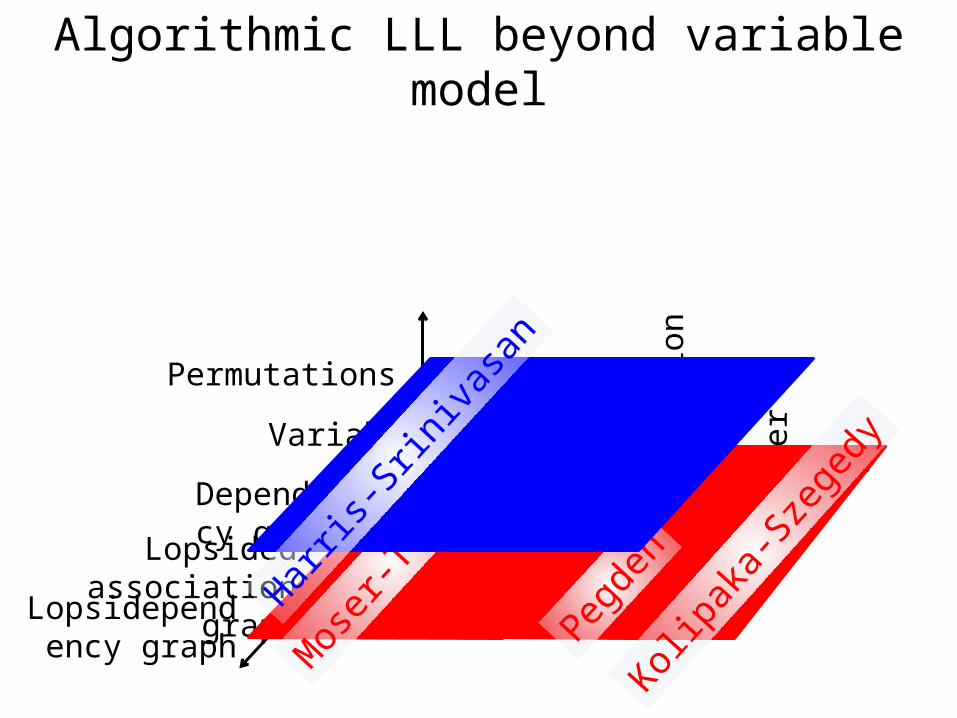
Algorithmic LLL beyond variable model

Sym
metr
ic
Gen
era
l
Clu
ster
Exp
an
sion
Sheare
rVariable model
Perfect Matchings in K n
Dependency graphLopsided
association graphLopsidepend
ency graph Mos
er-Ta
rdos
Pegd
enKo
lipak
a-Sz
eged
y
PermutationsAc
hlio
ptas
-
Iliop
oulo
s
Spanning Trees in K n?
Algorithmic LLL beyond variable model
* Needs slack+ Hamilton cycles in Kn...

Sym
metr
ic
Gen
era
l
Clu
ster
Exp
an
sion
Sheare
rVariable model
Perfect Matchings in K n
Dependency graphLopsided
association graphLopsidepend
ency graph Mos
er-Ta
rdos
Pegd
enKo
lipak
a-Sz
eged
y
Permutations
Achl
iopt
as-
Iliop
oulo
s
Spanning Trees in K n? * Needs
slack+ Hamilton. Cycles...
Algorithmic LLL beyond variable model

Algorithmic LLL beyond variable model
Sym
metr
ic
Gen
era
l
Clu
ster
Exp
an
sion
Sheare
rVariable model
Perfect Matchings in K n
Dependency graphLopsided
association graphLopsidepend
ency graph
Permutations
Spanning Trees in K n
All probability spaces
Our Results
* Need slackin Shearer’scriterion
* Intractability?

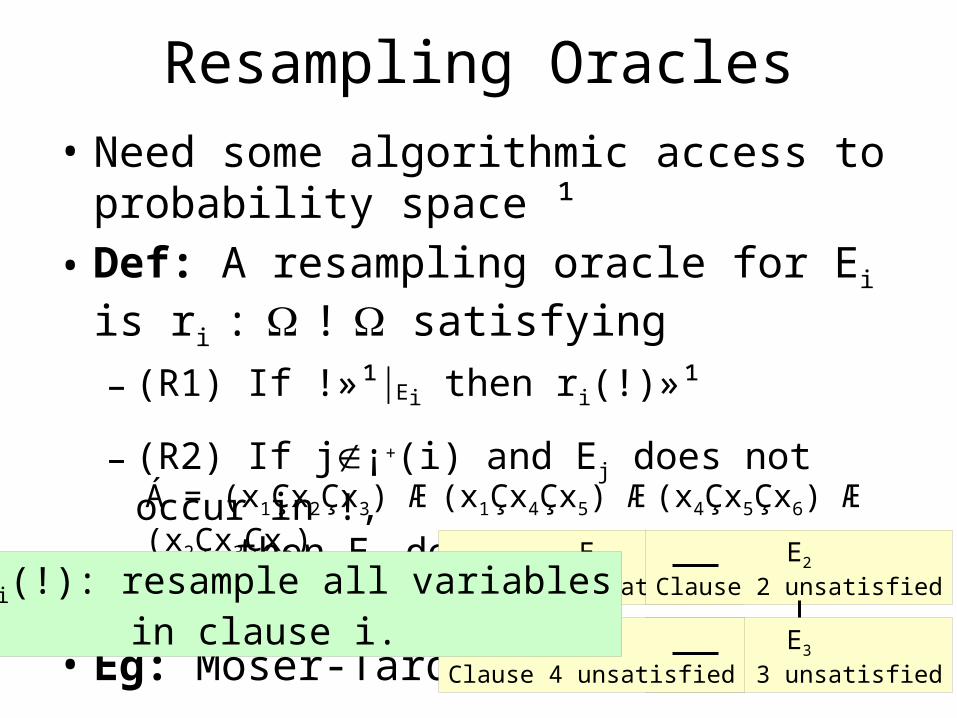
Resampling Oracles• Need some algorithmic access to probability
space ¹• Def: A resampling oracle for Ei is ri : ! satisfying– (R1) If !»¹|Ei then ri(!)»¹
Removes conditioning on Ei
– (R2) If j¡+(i) and Ej does not occur in !, then Ej does not occur in ri(!).
Cannot cause non-neighbors to occur
• Roughly, ri implements a coupling between ¹|Ei and ¹such that (R2) holds.
Resampling Oracles• Need some algorithmic access to
probability space ¹• Def: A resampling oracle for Ei is ri :
! satisfying– (R1) If !»¹|Ei then ri(!)»¹
– (R2) If j¡+(i) and Ej does not occur in !, then Ej does not occur in ri(!).
• Eg: Moser-Tardos Variable modelE1
Clause 1 unsatisfiedE2
Clause 2 unsatisfied
E3
Clause 3 unsatisfiedE4
Clause 4 unsatisfied
Á = (x1Çx2Çx3) Æ (x1Çx4Çx5) Æ (x4Çx5Çx6) Æ
(x2Çx3Çx6)ri(!): resample all variables in clause i.

Resampling Oracles• Need some algorithmic access to probability space
¹• Def: A resampling oracle for Ei is ri : ! satisfying– (R1) If !»¹|Ei then ri(!)»¹
– (R2) If j¡+(i) and Ej does not occur in !, then Ej does not occur in ri(!).
• Theorem: For any probability space and any events, TFAE– Existence of a lopsided association graph– Existence of resampling oracles.
• No guarantees it is compactly representable or efficient.What if events involve some NP-hard problem?

Resampling Oracles• Def: A resampling oracle for Ei is ri : !
satisfying– (R1) If !»¹|Ei then ri(!)»¹
– (R2) If j¡+(i) and Ej does not occur in !, then Ej does not occur in ri(!).
• Theorem: For any probability space and any events, TFAE– Existence of a lopsided association graph– Existence of resampling oracles.
• No guarantees it is compactly representable or efficient.What if events involve some NP-hard problem?

Spanning Trees in Kn
• Let T be a uniformly random spanning tree in Kn
• For edge set A, let EA = { AµT }.
• Lopsidependency Graph: Make EA
a neighbor of EB, unless A and B are vertex-disjoint.
• Resampling oracle rA:
– If T uniform conditioned on EA, want rA(T ) uniform.
–But, should not disturb edges that are vtx-disjoint from A.
Dependency

• EA = { AµT }.
• Resampling oracle rA(T ):
– If T uniform conditioned on EA, want rA(T ) uniform.
–But, should not disturb edges that are vtx-disjoint from A.A
T
–Contract edges of Tvtx-disjoint from A
–Delete remaining edgesvtx-disjoint from A
–Let rA(T ) be a uniformly random spanning tree in resulting graph.
rA(T )

Main Theorem
• Given–any probability space and events–a lopsided association graph– resampling oracles for the events
• Suppose that General LLL, Cluster Expansion or Shearer* holds.
• There is an algorithm to find a point in Åi Ei
c,running in oracle-polynomialy time, whp.
* Need slack for Shearer’s condition.y Actually depending on parameters in General LLL, etc.

Main Theorem• Given–any probability space and events–a lopsided association graph– resampling oracles for the events
• General LLL: 9 x1,...,xn 2 (0,1) such thatP[Ei] · xi ¢ j2¡(i) (1-xj) 8i.
• There is an algorithm to find a point in Åi
Eic,
using oracle calls, whp.

Main Theorem• Given–any probability space and events–a lopsided association graph– resampling oracles for the events
• Cluster Expansion: 9 y1,...,yn > 0 such that
P[Ei] · yi / Jµ¡+(i) yJ 8i.
• There is an algorithm to find a point in Åi Eic,
using oracle calls, whp.
J 2 Ind

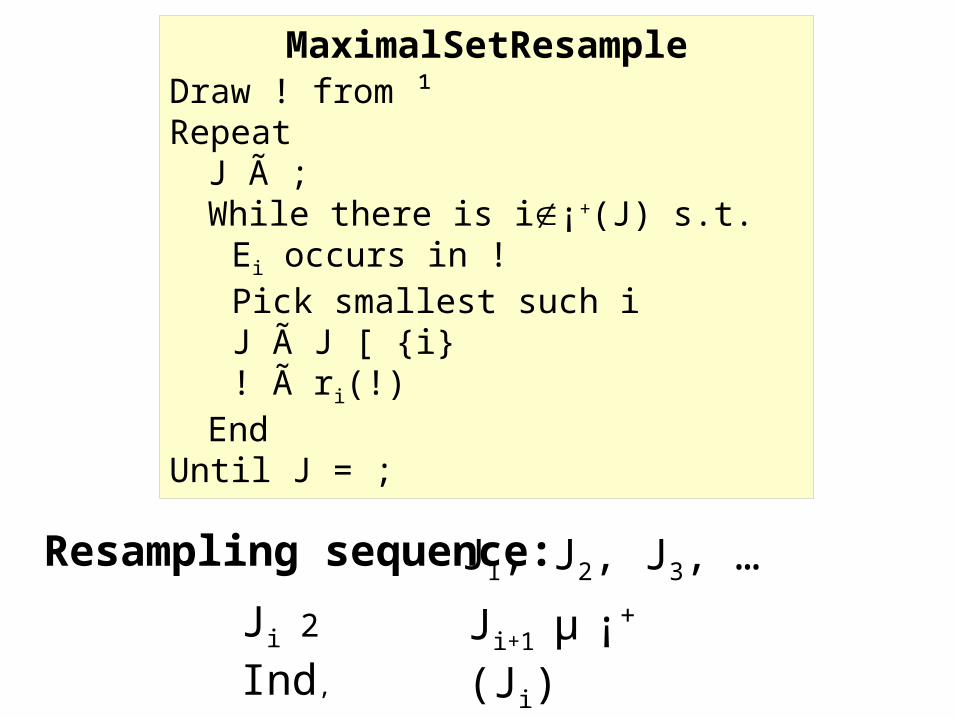
The AlgorithmMaximalSetResample
Draw ! from ¹Repeat
J Ã ;While there is i¡+(J) s.t. Ei occurs
in !Pick smallest such iJ Ã J [ {i}! Ã ri(!)
EndUntil J = ;
• Similar to parallel form of Moser-Tardos

AnalysisReview of Moser-Tardos
E3
E9
E2
E5
E1
E7
E1
E3
E9
…
“Log” or “History” of resampling operations
Start
Dependency graph edges

AnalysisReview of Moser-Tardos
E3
E9
E2
E5
E1
E7
E1
E3
E9
…
“Log” or “History” of resampling operations
Start
Dependency graph edges
Witness tree
MaximalSetResampleDraw ! from ¹Repeat
J Ã ;While there is i¡+(J) s.t. Ei occurs
in !Pick smallest such iJ Ã J [ {i}! Ã ri(!)
EndUntil J = ;
J1, J2, J3, …Resampling sequence:
Ji+1 µ ¡+(Ji)Ji 2 Ind,

• Trivially, E[ # iterations ] = § Pr[ I1,I2,… is a prefix of resampling sequence ]
• Claim: Pr[ I1,…,Ik is a prefix ] · 1·i·k pIi
• Like Moser-Tardos, this is a coupling argument.But instead of using fact that variable have “fresh samples” whenever examined, we use the fact that ri returns thestate to the underlying distribution ¹.
I1,I2,…

• Trivially, E[ # iterations ] = § Pr[ I1,I2,… is a prefix of resampling sequence ]
• Claim: Pr[ I1,…,Ik is a prefix ] · 1·i·k pIi
• Proof: Like Moser-Tardos, using ri returns state to ¹.
• Claim: Let P[Ei] · (1-²) xi ¢ j2¡(i) (1-xj) (General LLL)Then § 1·i·k pIi ·
• Proof: Key idea: inductively show that § 1·i·k pIi ·
I1,I2,…
I1,…,Ik
I1,…,IkI1 = J
Comparison to Fotis’ work• Pros for Fotis:– Don’t need to sample from ¹ (there is no
¹)– Can handle scenarios that are not even
a lopsidependency graph,e.g., Hamilton cycles, Vtx Coloring.
• Pros for us:– Characterize when resampling
operations exist– Gives new proof of General LLL with
Dependency Graphs,in full generality. (Even for Shearer & Lopsided Association Graphs).
– Don’t need any slack in General LLL or Cluster Expansion conditions
– “Fractional transitions” seem easier in our setting

![MultiwayCut,PairwiseRealizableDistributions ... · arXiv:1309.2729v3 [cs.DS] 12 May 2014 MultiwayCut,PairwiseRealizableDistributions, andDescendingThresholds Ankit Sharma∗ Jan Vondrak†](https://static.fdocuments.net/doc/165x107/60715703eb35e567585365a0/multiwaycutpairwiserealizabledistributions-arxiv13092729v3-csds-12-may.jpg)
















