Allocation and design of power system stabilizers for mitigating...
12
Allocation and design of power system stabilizers for mitigating low-frequency oscillations in the eastern interconnected power system in Japan Masachika Ishimaru a, * , Ryuichi Yokoyama a , Oriane Magela Neto b , Kwang Y. Lee c a Tokyo Metropolitan University, 1-1 Minamiosawa, Hachioji, Tokyo 192-0397, Japan b FUNREI, Praca Frei Orlando, 170 36307-352 Sao Joao del Rei MG, Brazil c The Pennsylvania State University, University Park, PA 16802, USA Abstract Low-frequency oscillations have been observed on trunk transmission systems in Japan, and have been the subject for studies in fields of operation, control, and devices by the many power system utilities. Power system stabilizers (PSSs) are very effective controllers in enhancing the damping of low-frequency oscillations, since the controllers can increase damping torque for inter area modes by introducing additional signals into the excitation controllers already equipped with generators. In this paper, allocation of PSSs in an interconnected power system with inter area modes has been determined by an eigenvalue analysis, and PSSs for the allocated generators have been designed by a frequency response method. The designed PSSs have been verified in a Japanese power system standard model. This test system is created as a standard model based on the trunk transmission systems in the eastern area of Japan, and reflects characteristic features of the real power systems; therefore, realistic allocation and design for enhancement of the stability of low-frequency oscillations have been verified. q 2004 Elsevier Ltd. All rights reserved. Keywords: Low-frequency oscillation; Power system stability; Frequency response method 1. Introduction Many electric utility systems are undergoing restructur- ing worldwide. In 1999, Japan also amended the Electricity Utility Act effective March 2000. This permitted participation of power producers and suppliers in the market. It deregulated the retail market partially, opening competition up to both domestic and foreign participants. This may result in a future power system, which is much more complicated. Recently, the combined effect of various factors has made it more difficult to maintain system stability. These include the increased use of heavily loaded long-distance transmission lines from power sources in remote and distant locations, an imbalance of power stations in different areas due to environmental and cost issues regarding their construction, and the difficulty of securing transmission line routes. In addition to the increased complication of the system, the societal requirement to maintain and supply high quality power is heightened and stabilization has become a significant issue. Also, under the present system in Japan, where only conventional system stabilization control devices are being used to damp oscillation, there is a concern for the occurrence of low-frequency oscillation phenomena, and developing countermeasures is considered as an urgent task. Two types of oscillation phenomena can occur on the present power system. One is where the oscillation of one generator at a specific power plant has an influence on the system. This type of oscillation is called local-mode oscillation and its behavior is mainly limited to the local area in the vicinity of the power plant. It rarely influences the rest of the system. It has been known that the local oscillation is likely to occur when power is transmitted over long-distance transmission lines from a power plant at a remote location. This type of system can be accurately modeled using the single-machine-infinite-bus (SMIB) system model [1]. The other case has been known as inter-area mode oscillation. This is the case where the low-frequency oscillation is maintained between sets of generators in an interconnected power system. The simplest type of low-frequency oscillation in the inter-area mode is between two interconnected areas. The inter-area mode oscillation has a long history. It has been observed 0142-0615/$ - see front matter q 2004 Elsevier Ltd. All rights reserved. doi:10.1016/j.ijepes.2004.04.007 Electrical Power and Energy Systems 26 (2004) 607–618 www.elsevier.com/locate/ijepes * Corresponding author. Tel.: þ 81-3-4586-6361; fax: þ81-3-4586-1185. E-mail address: [email protected] (M. Ishimaru).
Transcript of Allocation and design of power system stabilizers for mitigating...

Allocation and design of power system stabilizers for mitigating
low-frequency oscillations in the eastern
interconnected power system in Japan
Masachika Ishimarua,*, Ryuichi Yokoyamaa, Oriane Magela Netob, Kwang Y. Leec
aTokyo Metropolitan University, 1-1 Minamiosawa, Hachioji, Tokyo 192-0397, JapanbFUNREI, Praca Frei Orlando, 170 36307-352 Sao Joao del Rei MG, Brazil
cThe Pennsylvania State University, University Park, PA 16802, USA
Abstract
Low-frequency oscillations have been observed on trunk transmission systems in Japan, and have been the subject for studies in fields of
operation, control, and devices by the many power system utilities. Power system stabilizers (PSSs) are very effective controllers in
enhancing the damping of low-frequency oscillations, since the controllers can increase damping torque for inter area modes by introducing
additional signals into the excitation controllers already equipped with generators. In this paper, allocation of PSSs in an interconnected
power system with inter area modes has been determined by an eigenvalue analysis, and PSSs for the allocated generators have been designed
by a frequency response method. The designed PSSs have been verified in a Japanese power system standard model. This test system is
created as a standard model based on the trunk transmission systems in the eastern area of Japan, and reflects characteristic features of the real
power systems; therefore, realistic allocation and design for enhancement of the stability of low-frequency oscillations have been verified.
q 2004 Elsevier Ltd. All rights reserved.
Keywords: Low-frequency oscillation; Power system stability; Frequency response method
1. Introduction
Many electric utility systems are undergoing restructur-
ing worldwide. In 1999, Japan also amended the Electricity
Utility Act effective March 2000. This permitted
participation of power producers and suppliers in the
market. It deregulated the retail market partially, opening
competition up to both domestic and foreign participants.
This may result in a future power system, which is much
more complicated. Recently, the combined effect of various
factors has made it more difficult to maintain system
stability. These include the increased use of heavily loaded
long-distance transmission lines from power sources in
remote and distant locations, an imbalance of power stations
in different areas due to environmental and cost issues
regarding their construction, and the difficulty of securing
transmission line routes. In addition to the increased
complication of the system, the societal requirement to
maintain and supply high quality power is heightened and
stabilization has become a significant issue. Also, under
the present system in Japan, where only conventional
system stabilization control devices are being used to damp
oscillation, there is a concern for the occurrence of
low-frequency oscillation phenomena, and developing
countermeasures is considered as an urgent task.
Two types of oscillation phenomena can occur on the
present power system. One is where the oscillation of one
generator at a specific power plant has an influence on the
system. This type of oscillation is called local-mode
oscillation and its behavior is mainly limited to the local
area in the vicinity of the power plant. It rarely influences
the rest of the system. It has been known that the local
oscillation is likely to occur when power is transmitted over
long-distance transmission lines from a power plant at a
remote location. This type of system can be accurately
modeled using the single-machine-infinite-bus (SMIB)
system model [1]. The other case has been known as
inter-area mode oscillation. This is the case where the
low-frequency oscillation is maintained between sets of
generators in an interconnected power system. The simplest
type of low-frequency oscillation in the inter-area mode is
between two interconnected areas. The inter-area
mode oscillation has a long history. It has been observed
0142-0615/$ - see front matter q 2004 Elsevier Ltd. All rights reserved.
doi:10.1016/j.ijepes.2004.04.007
Electrical Power and Energy Systems 26 (2004) 607–618
www.elsevier.com/locate/ijepes
* Corresponding author. Tel.: þ81-3-4586-6361; fax: þ81-3-4586-1185.
E-mail address: [email protected] (M. Ishimaru).

in the tie-line connecting the large Pacific Southwest and the
Pacific Northwest in the United States. It has also been
observed on the tie-line connecting the northern Midwest
and Canada [2,3]. Observations have also been made of
low-frequency oscillation at 2.5 s per cycle on the trunk
transmission power system of Eastern Japan[4]. In general,
it is difficult to analyze these inter-area mode oscillations
since many generators and complicated network of
transmission lines are involved. Power system stabilizers
(PSSs) have been shown to be effective in stabilizing the
modes where there are different oscillation frequencies, as in
the above case. The PSS is a control device to improve the
stability of the system by introducing a supplementary
signal to an automatic voltage regulator (AVR). The AVR is
an exciter control device, which maintains the terminal
voltage of the generator at a constant level. Unlike AVR,
PSS is not electromechanical but is a supplementary
signal-generating device. Therefore, it is cost effective and
can be easily installed compared with other control devices.
Much research has been done on PSS. Some research has
focused on developing the PSS using multiple signal inputs
such as the generator active power, the generator speed,
and reactive power to maintain the linear characteristics
toward the phase angle on the heavily loaded transmission
system, and the bus voltage for a long distance line from the
generator [5,6]. There are two types of methods for
developing PSSs, where parameter optimization can be
used to damp oscillation between interconnected systems.
The first is to determine the parameters of PSS with
consideration for system operations [7]. The second
includes optimization methods using Artificial Neural
Networks (ANN) [8] or genetic algorithms (GA) [9].
The use of PSS in power system has been both
economical and successful in improving the power system
stability, and is expected to be installed on many
generators connected to the system. However, there are
different kind of power plants connected to the power
system, such as use fossil fuel, hydro and nuclear
power plants, and generators have different characteristics.
In addition, there are pumped storage power plants in
actual use. Whether a PSS is to be installed or not
depends, in part, on the type of power generation. If
low-frequency oscillation is damped by installing an
appropriate number of control devices at appropriate
locations within the power system, even further economic
gain can be expected. For this reason, it is very important
to have a method for determining the locations for PSS on
a realistic power system model. To improve the power
system stability of the entire system, a smaller number of
PSSs have been designed and installed in a real-size
system having inter-area mode oscillations.
The allocation of PSSs have been performed by using an
eigenvalue analysis on the system so that the dominant
generator with the greatest influence on both the power
system stability and the low-frequency oscillation becomes
the candidate for PSS installation. The proposed
approach designed a PSS for this dominant generator with
the capability for damping the system mode. In the design,
the approach used the frequency response method in the
SMIB system model. In the application of the proposed
method, the paper utilized the public domain East10 Model
published from the Institute of Electrical Engineering of
Japan, which is a standard model for the eastern part of the
Japanese interconnection system [10].
2. Power system model and allocation of controllers
It would be desirable to create a model to accurately
analyze each and every equipment in the power system
that is comparable to the real system. However, power
systems are huge systems with connections to
multiple generators and transformers and complicated
network of transmission lines. For this reason, it is
difficult to create a detailed model. The depth of the
system analysis depends on the size of the target power
system, and the accuracy of the model must be
compromised to some degree.
Local mode oscillation has been known to occur at the
generator connected to the system by tie-lines that are
weak for the case of the infinite-bus model. Analysis of
local mode oscillation is done using a detailed model
based on the SMIB system model. However, inter-area
mode occurs in very large system of interconnected,
multi-machine systems; therefore, it is difficult to do a
detailed analysis. In this paper, an aggregated linear
model of a multi-machine power system that does not
involve detailed analysis of a multi-machine power system
but is effective for developing the transmission line
system structure has been used [11].
2.1. Eigenvalue analysis of multi-machine power system
In an analysis of the system stability, eigenvalues of a
power system model have been derived and evaluated.
By analyzing eigenvalues, characteristics of system
dynamics are grasped without a time domain simulation.
Therefore, the eigenvalue analysis is effective in
evaluating the system stability for a multi-machine
power system [14,15].
A swing equation of the ith generator, which indicates
the energy balance between a mechanical input and an
electrical output, is expressed as follows:
Mi
d2
dt2di ¼ Pmi 2 Pei 2 Divi ð1Þ
An active power output of the ith generator in Eq. (1) is
calculated as:
Pei ¼Xn
j¼1
EiEjYij cosðuij 2 di þ djÞ ð2Þ
M. Ishimaru et al. / Electrical Power and Energy Systems 26 (2004) 607–618608

Also, a damping constant of each generator is expressed
as belows:
Di¼e2i v0i
ðX0di2X00
diÞT00doi
X0di2Xei
sin2d0iþðX0
qi2X00qiÞT
00qoi
X0qi2Xei
cos2d0i
( )
ð3Þ
In the case of the stability analysis, the damping constants
are very important coefficients, because the constants affect
real parts of system eigenvalues. In a conventional approach
on power system stability for multi-machine power system,
network reduction has been performed for analysis and
control purpose. This technique is able to deal with
transmission lines, transformers, loads, and other
equipments in the power system by using the per unit (pu)
method. The system eigenvalues have been evaluated by
considering the components and structures of the power
system; that is to say, the eigenvalues reflect electrical
distances between generators. Therefore, the power system
stability has been evaluated in the multi-machine power
system by considering the network configurations.
A condition, that all eigenvalues are in the negative real
half of the complex plane, has been well known for a stable
system. Also, an eigenvalue existing nearby the imaginary
axis, influences the system stability severely. Moreover, the
imaginary parts of system eigenvalues dominate the system
oscillation frequency in the time domain. The parameters in
Eqs. (1)–(3) are listed in Table 1.
2.2. Determination of the dominant generator by utilizing
participation factor
The power system dynamics can be evaluated by
analyzing of the system eigenvalues. In this evaluation,
a dominant root, which is located near the imaginary axis,
can be recognized. In the case of stabilizing the dominant
root by applying an appropriate controller, the power system
stability can be enhanced. This paper proposes an approach
to determine locations of generators, which should be
equipped with the controllers. In the approach, a partici-
pation factor is utilized [12]. The participation factor is
effective in finding state variables affecting the dominant
root. The factor is derived from eigenvectors.
First, eigenvector fj is calculated with an eigenvalue lj of
a system matrix Aðn £ nÞ:
F ¼ ½f1ff2f· · ·fn� ð4Þ
Next, a vector ci is defined as below:
C ¼ ½F21�T ¼ ½c1fc2f· · ·fcn� ð5Þ
In this case, a participation factor pij is expressed as follows:
pij ¼ fij £ cij ð6Þ
Here, these two matrices F and C have been related as
F £CT ¼ I; therefore:
Xn
j¼1
pij ¼Xn
j¼1
fij £ cij ¼ 1:0 þ j0:0 ð7Þ
In a similar way:
Xn
i¼1
pij ¼ 1:0 þ j0:0 ð8Þ
The participation factor pij expresses the influence or
sensitivity upon ith state variable against the eigenvalue
lj; and Eqs. (7) and (8) implies the numerical values are
normalized. In these characteristics, the participation factor
is more effective than normal eigenvectors, and useful for
the eigenvalue analysis. In this paper, the state variable
affecting the dominant root is determined by the evaluation
of the participation factor; moreover, a dominant generator,
which should be equipped with a PSS controller, is selected.
3. Design of power system stabilizer based
on the frequency response method
This paper aims at allocating and designing PSSs against
low-frequency oscillation on the trunk power system in the
eastern area of Japan. The low-frequency oscillation in bulk
power system is related with inter-area mode. However, it is
difficult to prove the cause of the occurrence of the
low-frequency oscillation in the bulk power system. In this
Table 1
List of parameters in Eqs. (1)–(3)
Mi Inertia constant (pu MW s2/rad)
di Rotor angle (rad)
Pmi Mechanical input (pu MW)
Pei Electrical output (pu MW)
Di Damping constant (pu MW s/rad)
vi Deviation from reference speed (rad/s)
Ei Magnitude of internal voltage (pu)
Yij Magnitude of admittance between generators
i and j
(pu)
uij Phase angle of admittance between
generators i and j
(pu)
ei Voltage of infinite bus (pu)
Xei External reactance (pu)
d0i Initial rotor angle of infinite bus voltage (rad)
v0i Rotation speed of generator in steady-state (rad/s)
Xdi0 d-Axis transient reactance (pu)
Xqi0 q-Axis transient reactance (pu)
Xdi00 d-Axis subtransient reactance (pu)
Xqi00 q-Axis subtransient reactance (pu)
Tdoi00 d-Axis subtransient open-circuit time constant (s)
Tqoi00 q-Axis subtransient open-circuit time constant (s)
Fig. 1. Single-machine-infinite-bus (SMIB) system model.
M. Ishimaru et al. / Electrical Power and Energy Systems 26 (2004) 607–618 609

paper, PSS parameters have been designed based on a
frequency response method for a local mode, and the
allocation of PSS controllers has been determined based on
the inter-area mode.
A PSS for the enhancement of the local mode is designed
for SMIB system model shown in Fig. 1. The SMIB system
model ignores power system networks beyond the infinite bus;
therefore, the model has not reflected the electrical distances,
for example components and structures of transmission lines
and other equipments. However, the model is suitable for the
design of PSS parameters, because an exhaustive study on the
generator model has been made already [1].
A generators’ dynamics for small-signal stability anal-
ysis in SMIB system has been expressed, with linearization
by assuming the flux linkages of the field winding is
constant, as follows:
M
v0
s2DdþD
v0
sDdþ KDd ¼ 0 ð9Þ
In the equation above, under condition that the solution
calculated in Eq. (10) is not a positive real number, the
dynamics of the system is stable. In other words, the
condition is that the damping constant D is a positive
number ðD . 0Þ; and the synchronizing coefficient K is also
positive ðK . 0Þ:
s ¼2D ^ j
ffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffi4Kv0M 2 D2
p2M
ð10Þ
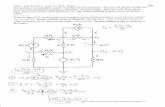
Block diagrams of damping constant and synchronizing
coefficient of a generator and an AVR with a PSS are shown
in Fig. 2. This figure shows that Dd operates as the
synchronous torque for the electrical oscillation of the
generator, also Dv delaying 908 in phase than Dd signal,
functions as the damping torque. Therefore, each torque of
the generator is, respectively, expressed and analyzed in the
design and evaluation of PSS parameters. The constants K 0
and D0 in the figure, respectively, mean the changes in
synchronous torque and damping torque due to equipping
with both an AVR and a PSS. The synchronous torque and
damping torque of the combined generator and the excitation
Fig. 2. Linearized model of SMIB system.
Fig. 3. IEEJ EAST10 power system standard model.
M. Ishimaru et al. / Electrical Power and Energy Systems 26 (2004) 607–618610

controller are defined as the synchronizing torque
coefficient Ks and a damping torque coefficient Kd:
4. Allocation of power system stabilizers
in EAST10 model
The allocated and designed PSSs in the proposed
approach have been verified in a Japanese power system
standard model, named ‘East10 Model’ (Fig. 3), released
by the Institute of Electrical Engineering of Japan. This
test system is created as a standard model based on the
trunk transmission systems in the eastern area of Japan,
and reflects characteristic features in the actual power
systems. In addition, operational conditions in peak load
and off-peak load have been set in the system model. In
this paper, the peak load condition, where generators
operate in their output margin, is used for the allocation of
PSSs. The generators in the power system model have
been normally equipped with AVRs shown in Fig. 4. The
normal AVR is not suitable for installing the PSS because
of its slow operation; therefore, a thyristor excited high
performance AVR shown in Fig. 5 has been installed in
the dominant generator instead of the normal AVR. In
view of economics, the least number of replacing AVRs
and installing PSSs is desired. This paper aims at
enhancing the stability against the low-frequency oscil-
lation by replacing AVRs and installing PSSs into the
dominant generator in a test power system. The EURO-
STAG Ver. 4.0 produced by EDF and Tractebel is used in
simulations. A flow chart of the proposed approach is
shown in Fig. 6.
4.1. Eigenvalue analysis of EAST10 model
In this paper, the eigenvalue analysis has been applied to
the test power system model The power system model is
expressed by Eqs. (1)–(3). The eigenvalues of the controlled
system are derived from these expressions with aggregation
of the power system. The obtained eigenvalues are shown in
Fig. 7. The eigenvalue analysis takes notice of conjugate
eigenvalues; therefore, the eigenvalues that take the
positive numbers in the imaginary part are numbered in
Fig. 7. A slant line area in the figure shows that
an eigenvalue in this area has a peculiar oscillation between
2 and 4 s per cycle.
Fig. 4. Block diagram of automatic voltage regulator.
Fig. 5. Block diagram of thyristor excited high performance automatic
voltage regulator.
Fig. 6. Flow chart for allocation and design of PSS.
Fig. 7. System eigenvalues in EAST10 model.
M. Ishimaru et al. / Electrical Power and Energy Systems 26 (2004) 607–618 611

The results of the eigenvalue analysis indicate that Mode 2
dominates the low-frequency oscillation in EAST10 model,
and Mode 5 affects the power system stability. The Mode 2 is
named ‘Low-Frequency dominant mode’, also Mode 5 is
called ‘Stability dominant mode’ just for the sake of
convenience. When these modes have been stabilized, the
low-frequency oscillation is stabilized and the power system
stability is enhanced. The eigenvalues and oscillation periods
of both dominant modes are listed in Table 2.
4.2. Determination of the dominant generator
for installing PSS by utilizing participation factor
The modes dominating the low-frequency oscillation and
the stability have been selected in the eigenvalue analysis.
In the case when a state variable affecting each dominant
mode has been identified, a dominant generator is
determined. The selected generator is a candidate, which
should have the designed PSS installed. In this paper,
the participation factor has been utilized to determine
the dominant generator. The factor is expressed in complex
numbers. The proposed approach deals with the real part
of the factor and ignores the imaginary part, since
the summation of the participation factor in row or column
is 1.0 þ j0.0 by normalization. The factors, ignoring the
imaginary parts, are called participation rates in distinction
from the participation factors. The participation rates for
EAST10 model is shown in Fig. 8. In the figure, the state
variables are numbered as; ½1 : Dv1;…; 10 : Dv10; 11 :
Dd221;…; 19 : Dd1021�
The results of evaluating the participation rates show
that a generator G9 dominates the low-frequency oscil-
lation and a generator G6 influences the power system
stability. This paper replaces the AVRs in these dominant
generators with the thyristor-excited high performance
AVRs, and designs and installs new PSSs into the AVRs
to enhance the damping.
5. Design of PSS focused on the dominant generator
and verification in the East10 model
Through system analysis with the East10 model,
the dominant generator that most effectively damped the
low-frequency oscillation and the generator that most
improved the stability of the entire system have been
identified. In this section, PSSs for each of these generators
are designed. Here, the AVR is replaced with the thyristor-
excited high performance AVR shown in Fig. 5. The design
goal of PSS is to improve the damping torque coefficient
Table 2
Eigenvalue and oscillation period of dominant modes
Mode No. Eigenvalue Oscillation period (s)
Mode 2 20.0590 þ j1.9843 3.1664
Mode 5 20.0350 þ j3.2597 1.9275
Fig. 8. System participation rates in EAST10 model.
M. Ishimaru et al. / Electrical Power and Energy Systems 26 (2004) 607–618612

with the least influence on the synchronizing torque
coefficient by adding the PSS signal to AVR. Experience
has shown that to do this requires appropriate damping
torque of about 20 pu in the frequency range where the
eigenvalue of the frequency of the given generator is
0.1–1.0 Hz. However, it is desirable to determine the PSS
parameters by examining the damping torque of each
generator. This is because there are differences in capacity
and the inertia constant that are dependent on the power
plant type and because there are influences from the
electrical distance between generators, i.e. influence of
the system structure.
The proposed approach for allocation and design of PSSs
has been examined in the East10 Model. In the power
system model, the low-frequency oscillation between 2 and
4 s per cycle has been observed by opening a single-line at
1.0 s for 0.07 s nearby node No.36. This paper aims at
damping the low-frequency oscillation by a proper
allocation and design of PSSs.
5.1. Design of PSS parameters for the low-frequency
dominant generator
This paper designs a PSS for the low-frequency dominant
generator G9 assuming node No.19 to be the infinite
bus[13]. A block diagram of designed P-Type PSS is
shown in Fig. 9 and effects of the PSS are shown in Fig. 10.
The designed PSS in Fig. 9 realizing 30 pu of the damping
Fig. 9. PSS block diagram for low-freq. dominant generator.
Fig. 10. Kd and Ks in generator No. 9. with P-type PSS.
M. Ishimaru et al. / Electrical Power and Energy Systems 26 (2004) 607–618 613

torque coefficient in the low-frequency domain does not
influence the synchronous torque coefficient. Moreover,
Fig. 10 shows the PSS has an effective damping torque
coefficient in a wide range, including oscillation modes of
generator’s own.
5.2. Verification of the low-frequency dominant PSS
in EAST10 model
The designed PSS has been verified for the contingency,
breaking out the low-frequency oscillation in the EAST10
Fig. 11. Power system oscillations without PSS.
M. Ishimaru et al. / Electrical Power and Energy Systems 26 (2004) 607–618614

model. Simulation results of not replacing AVRs and not
installing PSSs are shown in Fig. 11, and results of replacing
the AVR and installing the designed PSS into the generator
G9 are shown in Fig. 12. These figures show phase angles of
arbitrary generators in the top row, electrical outputs
of generators in the middle, and active power flows through
arbitrary transmission lines in the bottom.
By comparison of these results, the low-frequency
oscillation at about 4 s per cycle of the electrical output of
generator G9 in Fig. 11 is damped in Fig. 12 by installing
the designed PSS into the dominant one; therefore, the
low-frequency oscillation such as in Fig. 11 are removed
from all outputs in Fig. 12. These results indicate that the
proposed approach can damp the low-frequency oscillation
Fig. 12. PS oscillations with low frequency dominant PSS.
M. Ishimaru et al. / Electrical Power and Energy Systems 26 (2004) 607–618 615

by the excitation controller equipped with the generator
related in the dominant eigenvalue. Therefore, the approach
succeeds allocating and designing of the PSS against
oscillation frequencies in a multi-machine power system.
However, the power system stability has not been
enhanced in Fig. 12 yet, because the stability
dominant mode (Mode 5 in Fig. 7) has not been improved
by this PSS. Mode 5 has the oscillation frequency about 2 s
in the period listed in Table 2; therefore, the
oscillation period of simulation results in Fig. 12
corresponds with one of Mode 5. These results indicate
the necessity of installing a PSS into the stability dominant
generator G6 at the same time.
5.3. Design of PSS parameters for the stability dominant
generator
A PSS equipped with the stability dominant generator
G6 is also designed by utilizing SMIB system A diagram
of a designed PSS for G6 is shown in Fig. 13, and effects
of the PSS are shown in Fig. 14.
The damping torque coefficient in Fig. 14 shows about
3 pu. This coefficient value is especially regulated for the
EAST10 model, because higher damping torque coefficient
has a possibility to make the system unstable; therefore, the
design of PSS parameters needs to regulate or adjust against
the dynamics of the entire power system.
Fig. 14. Kd and Ks in generator No. 6 with P-type PSS.
Fig. 13. PSS block diagram for stability dominant generator.
M. Ishimaru et al. / Electrical Power and Energy Systems 26 (2004) 607–618616

5.4. Verification of the stability dominant PSS
in EAST10 model
The designed PSS for the stability dominant generator G6
has been verified in the EAST10 model. In the verification,
the low-frequency dominant PSS has been equipped in
the generator G9. The damping torque coefficient in Fig. 14
is smaller than one in the low-frequency dominant PSS.
However, the designed PSS succeeded in enhancing the
power system stability. The results indicate that the design
of PSS needs to consider the system configurations, i.e. the
electrical distance between generators (Fig. 15).
Fig. 15. PS oscillations with stability dominant PSS.
M. Ishimaru et al. / Electrical Power and Energy Systems 26 (2004) 607–618 617

6. Conclusions
In this paper, the allocation and design method of PSSs
have been proposed to suppress the low-frequency
oscillation in the Eastern area of Japan. The proposed
method was applied to the East10 Model, modeled after the
trunk transmission power system of the Eastern area.
The proposed approach created an aggregated model of
the multi-machine power system and performed the
eigenvalue analysis. Among the eigenvalues identified,
two dominant modes, i.e. low-frequency dominant mode
and stability dominant mode have been focused and
stabilized. These modes are intrinsic to the damping torque
of each generator and the transmission system structure and
components, i.e. the electrical distance between generators.
The proposed approach has succeeded in determining the
dominant generator with the ability to influence these modes
by evaluating the participation rates to the low-frequency
dominant mode and the stability dominant mode.
This paper has examined a system by designing and
configuring a PSS at a particular time of the day using the
East10 Model. Since the power system changes over time,
in the future we will need to examine a robust design and
allocation of PSS that ensures stability at various times.
References
[1] de Mello FP, Concordia C. Concepts of synchronous machine stability
as affected by excitation control. IEEE Trans Power Apparatus Syst
1969;316–29.
[2] Schleif FP, White JH. Damping for the Northwest–Southwest tieline
oscillations an analog study. IEEE Trans Power Apparatus Syst 1966;
PAS-85(12):1239–47.
[3] IEEE Working Group on System Oscillations, Inter Area Oscillation
in Power Systems. IEEE Special Publications 95-Tp-101; 1995.
[4] Michigami T. The development of a new two-input PSS to control
low-frequency oscillation in interconnecting power systems and the
study of a low-frequency oscillation model. Trans IEE Jpn 1995;
115-B(1):42–61.
[5] Kitauchi Y, Taniguchi H, Shirasaki T, Ichikawa Y, Asano M, Banjo
M. Setting scheme and experimental verification of multi-input PSS
parameters for damping low frequency power swing in multi-machine
power system. Trans IEE Jpn 2002;122-B(1):137–44.
[6] Yoshimura K, Uchida N, Okada T. Development of optimizing
method for generator excitation parameters considering overall
stability of multi-machine power system. Trans IEE Jpn 2001;
121-B(2):201–9.
[7] Yoshimura K, Uchida N. Optimization method of P þ v
PSS’s parameters for stability and robustness enhancement in a
multi-machine power system. Trans IEE Jpn 1998;118-B(11):
1312–20.
[8] Salem MM, Zaki AM, Mahgoub OA, El-Zahab EA, Malik OP.
Studies on a multi-machine power system with a neural network based
on excitation controller. Proceeding of IEEE PES Summer Meeting,
July; 2000.
[9] Zhang P, Coonick AH. Coordinated synthesis of pss parameters in
multi-machine power systems using the method of inequalities
applied to genetic algorithms. IEEE Trans Power Syst 2000;15(2):
811–6.
[10] The Technical Committee of the Institute of Electrical Engineering of
Japan, Japanese Power System Model. IEE of Japan, No. 754; 1999.
[11] Anderson PM, Fouad AA. Power system control and stability. IEEE
Press; 1993.
[12] Kundur P. Power system stability and control. New York: McGraw-
Hill; 1994.
[13] Ishimaru M, Yokoyama R, Koyanagi K. PADES: ananalytical tool for
designing of power system stabilizer for cross-compound unit. Proc
IEEE PowerTech Porto 2001;.
[14] Lee BH, Lee KY. Dynamic and static voltage stability enhancement
of power systems. IEEE Trans Power Syst 1993;8(1):231–8.
[15] Khalde MR, Sarkar AK, Lee KY, Park YM. The modal performance
measure for parameter optimization of power system stabilizers. IEEE
Trans Energy Convers 1993;8(4):660–6.
M. Ishimaru et al. / Electrical Power and Energy Systems 26 (2004) 607–618618