Allbot® Folder - PL
2
allbot.eu void setup() { //NAME.attach(motorname, pin, init-angle, flipped, offset-angle); BOT.attach(hipFrontLeft, A1, 45, 0, 0); BOT.attach(hipFrontRight, A0, 45, 1, 0); BOT.attach(hipRearLeft, 9, 45, 1, 0); BOT.attach(hipRearRight, 4, 45, 0, 0); BOT.attach(kneeFrontLeft, 11, 45, 1, 0); BOT.attach(kneeFrontRight, 2, 45, 0, 0); BOT.attach(kneeRearLeft, 10, 45, 1, 0); BOT.attach(kneeRearRight, 3, 45, 0, 0); //INIT sounder pinMode(sounderPin, OUTPUT); //wait for joints to be initialized delay(500); } //INIT sounder pinMode(sounderPin, OUTPUT); //wait for joints to be initialized delay(500); // Chirp for ready chirp(1, 50); chirp(1, 255); chirp(3, 0); } void loop() { // put your main code here, to run repeatedly: } oparte na bazie ARDUINO ® ARDUINO® ORAZ BATERIE DO ZAKUPU OSOBNO. ARDUINO® I ARDUINO® TO ZAREJESTROWANE ZNAKI HANDLOWE W NIEKTÓRYCH KRAJACH. VELLEMAN I ALLBOT NIE SĄ W ŻADEN SPOSÓB POŁĄCZONE Z ARDUINO. ALLBOT® ORAZ ALLBOT LOGO TO ZAREJSTROWANE ZNAKI HANDLOWE FIRMY VELLEMAN NV. WYDAWCA NIE PONOSI ODPOWIEDZIALNOŚCI ZA EWENTUALNE BŁĘDY. ILUSTRACJE I TEKSTY MOGĄ ULEC ZMIANIE BEZ WCZEŚNIEJSZEGO POWIADOMIENIA. NIE WYRZUCAĆ NA ULICĘ. VELLEMAN® TO ZAREJESTROWANY ZNAK HANDLOWY. PRAWA AUTORSKIE 2016 VELLEMAN NV. Twój dystrybutor: ALLBOT app zainteresowany? odwiedź stronę albot.eu aby znaleźć najbliższego dealera! zbuduj. korzystając z instrukcji online ucz się. kodować i pisać szkice podłącz. korzystając z Arduino IDE eksperymentuj. i modyfikuj dostarczone szkice FOL/ALLBOT01PL PODŁĄCZ. ZBUDUJ. EKSPERYMENTUJ. UCZ SIĘ. SYSTEM ROBOTÓW DO DALSZEJ ROZBUDOWY
-
Upload
velleman-nv -
Category
Documents
-
view
230 -
download
2
description
Allbot®, expandable robot system made for Arduino
Transcript of Allbot® Folder - PL

allbot.eu
void set
up() {
//NAME
.attach(
motornam
e, pin,
init-ang
le, flipp
ed, offs
et-angle
);
BOT.at
tach(hip
FrontLef
t, A1,
45, 0,
0);
BOT.at
tach(hip
FrontRig
ht, A0,
45, 1,
0);
BOT.at
tach(hip
RearLeft
, 9,
45, 1,
0);
BOT.at
tach(hip
RearRigh
t, 4,
45, 0,
0);
BO
T.attach
(kneeFro
ntLeft,
11, 45
, 1, 0);
BOT.at
tach(kne
eFrontRi
ght, 2,
45, 0,
0);
BOT.at
tach(kne
eRearLef
t, 10,
45, 1,
0);
BOT.at
tach(kne
eRearRig
ht, 3,
45, 0,
0);
//INIT
sounder
pinMod
e(sounde
rPin, OU
TPUT);
//wait
for joi
nts to b
e initia
lized
delay(
500);
}
//INIT sounder
pinMode(sounderPin, OUTPUT);
//wait for joints to be initialized
delay(500); // Chirp for ready
chirp(1, 50);
chirp(1, 255);
chirp(3, 0);}
void loop() {
// put your main code here, to run repeatedly:
}
oparte na bazie ARDUINO®
ARDUINO® ORAZ BATERIE DO ZAKUPU OSOBNO. ARDUINO® I ARDUINO® TO ZAREJESTROWANE ZNAKI HANDLOWE W NIEKTÓRYCH KRAJACH. VELLEMAN I ALLBOT NIE SĄ W ŻADEN SPOSÓB POŁĄCZONE Z ARDUINO. ALLBOT® ORAZ
ALLBOT LOGO TO ZAREJSTROWANE ZNAKI HANDLOWE FIRMY VELLEMAN NV. WYDAWCA NIE PONOSI ODPOWIEDZIALNOŚCI ZA EWENTUALNE BŁĘDY. ILUSTRACJE I TEKSTY MOGĄ ULEC ZMIANIE BEZ WCZEŚNIEJSZEGO POWIADOMIENIA. NIE WYRZUCAĆ NA ULICĘ. VELLEMAN® TO ZAREJESTROWANY ZNAK HANDLOWY. PRAWA AUTORSKIE 2016 VELLEMAN NV.
Twój dystrybutor:
ALLBOT app
zainteresowany?odwiedź stronę
albot.eu aby znaleźć najbliższego dealera!
zbuduj.korzystając z
instrukcji online
ucz się.kodować i pisać szkice
podłącz.korzystając z Arduino IDE
eksperymentuj.i modyfikuj
dostarczone szkice
FOL/
ALL
BO
T01
PL
PODŁĄCZ.ZBUDUJ.
EKSPERYMENTUJ.
UCZ SIĘ.
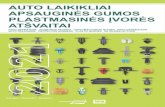
SYSTEM ROBOTÓW DO DALSZEJ ROZBUDOWY

dodatki.Konstruuj i rozbudowuj
robota, ucz się jak go programować, używaj
aplikacji i baw się świetnie!
możliwości.Jesteś kreatywny? Możesz
zbudować swojego własnego ALLBOTA używając różnych dodatków!
poznaj ALLBOTY .
ALLBOTY to modularny system robotów oparty o płytki kompatybilne
z Arduino.
Wszystkie części są open source, więc drukuj je dowolnie na drukarce 3D!
Znajdź ALLBOTY na
ZBUDUJ SWOJEGO PIERWSZEGO ROBOTA ROZBUDUJ SWOJEGO ALLBOTA SKONSTRUUJ SWOJEGO WŁASNEGO ALLBOTA
VR204 ALLBOT dwunożny
VR408 ALLBOT czteronożny
Do każdego ALLBOTA dostępna jest instrukcja online zawierająca przykładowe kody (szkice Arduino), aby pomóc Ci w zaprogramowaniu
twojego Arduino UNO lub Arduino Mega!
VR001 nadajnik IR do sterowania ALLBOTEM poprzez twój smartfon (załączony w VR408)
VR002 prosty zestaw czujników: termometr + czujnik światła + czujnik dźwięku
VR003 zaawansowany zestaw czujników: żyroskop + akcelerometr + magnetometr
VR006 2 x zestawy servo 9G
VR007 zestaw części plastikowych
VR012 noga z dwoma servo mechanizmami
VR013 noga z trzema servo mechanizmami
VRBS2 zestaw baterii Li-ion
znajdź
więcej
dodatków na
allbot.eu
znajdź ALLBOTY na kanale