
Algorithm Presentation
14
Spatial Research Group Presentation Professor Ramnath -Bhavtosh Rath
-
Upload
bhavtosh-rath -
Category
Documents
-
view
74 -
download
2
Transcript of Algorithm Presentation

Spatial Research Group Presentation
Professor Ramnath-Bhavtosh Rath
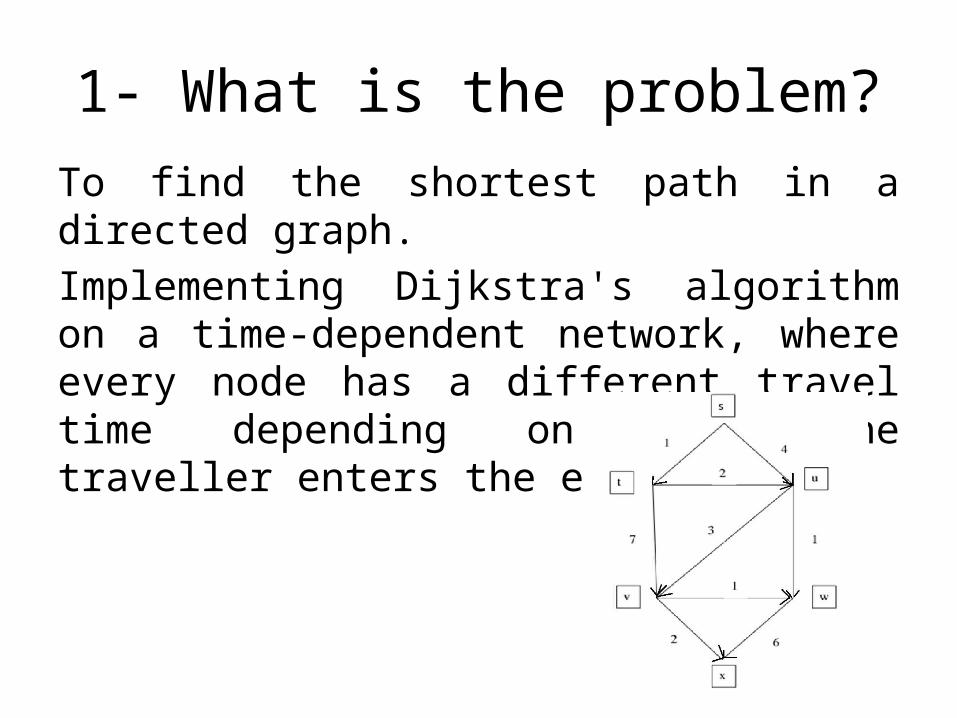
1- What is the problem?To find the shortest path in a directed graph.Implementing Dijkstra's algorithm on a time-dependent network, where every node has a different travel time depending on when the traveller enters the edge.

2 – Why is it important?
• Application in the transportation sector
- Which path to choose from a given set of paths?- When to choose a specific path?
Concept could be applied to any network that suffers from time-dependent congestion problem .
3 – Why is it hard ?
• We have a large search space and need to navigate through this efficiently.

4- What are limitations of related work?
• Continuous approach does not prove bounds on the size of the structures created during search.
• Discrete approach does not act simultaneously on space and time.
5- What is the proposed approach?
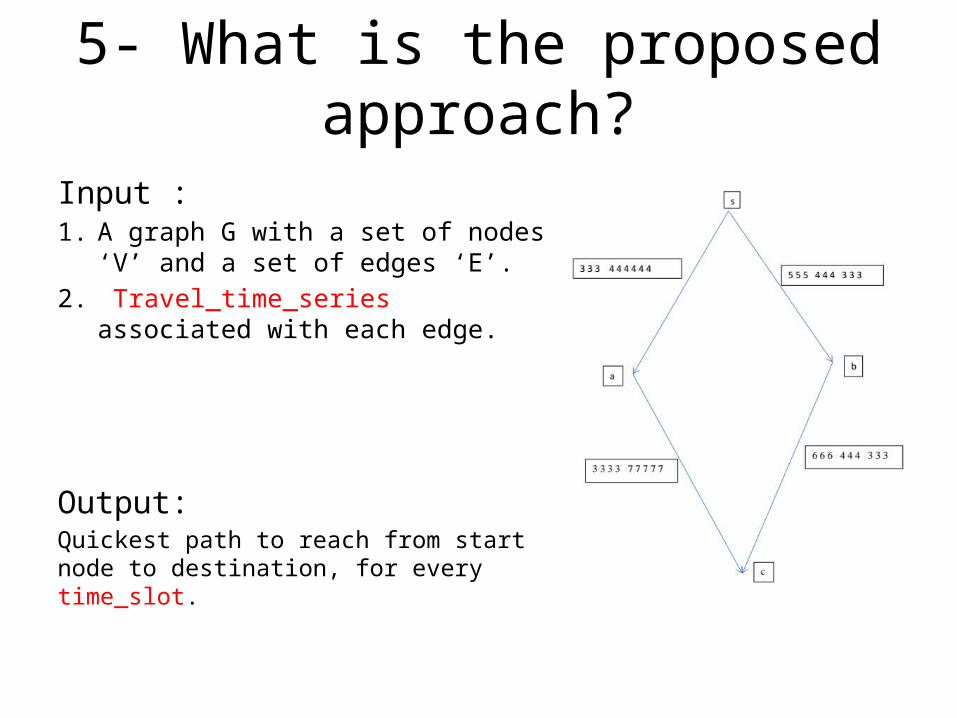
Input :1. A graph G with a set of nodes ‘V’
and a set of edges ‘E’.2. Travel_time_series associated with
each edge.
Output:Quickest path to reach from start node to destination, for every time_slot.

Algorithm approach:
Step1 : Generate labels for all the nodes connected to the Start node. (i.e. s)
To do this, check the Travel_time_series associated with all edges beginning from the start node.
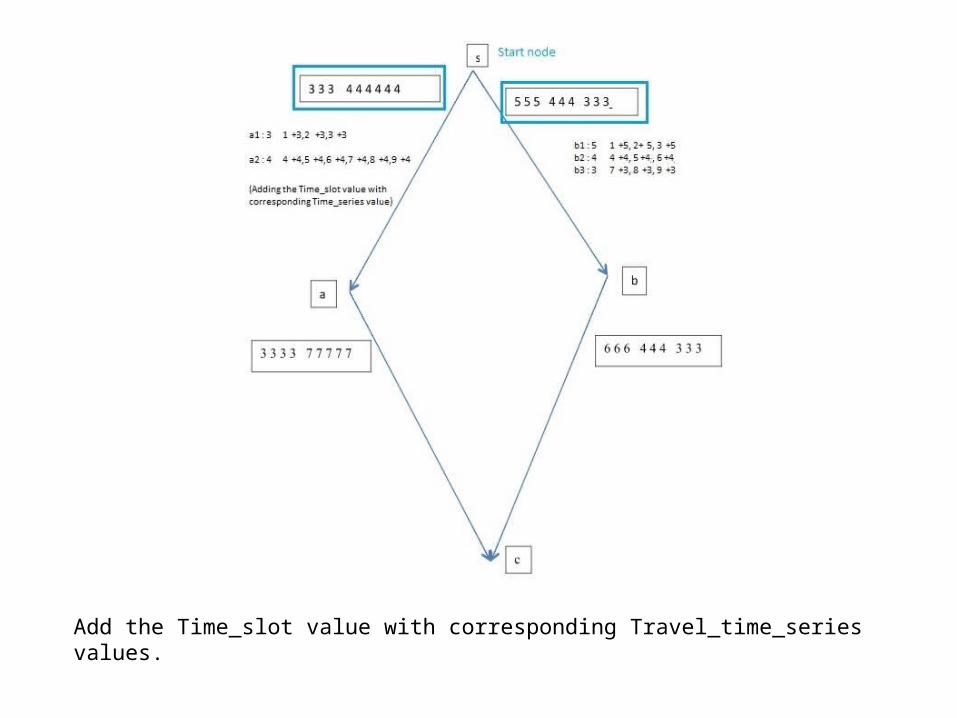
Add the Time_slot value with corresponding Travel_time_series values.

Step 2: Iteratively generate labels from the labels with least time_series generated so far.

Algorithm.


6 – Why is it novel and better ?
• Brings us closer to the idea of not exploring unnecessary paths.

7 – Validation Design ?
• Implement algorithm and compare wth Dijkstra for all start times.
• Parameters to be considered : Length of time series Desired accuracy Frequency with which travel time changes.
(The two algorithms will be tested for different values of these parameters).
Questions / Comments ?


















