Algjebra Lineare (T.Tashka)
176
Leksione të algjebrës lineare Tanush Shaska
Transcript of Algjebra Lineare (T.Tashka)

Leksione të algjebrës lineare
Tanush Shaska

ii
T. ShaskaDepartment of MathematicsOakland UniversityRochester Hills, MI, 48309.USA
Mathematics Subject Classification (2000): 15-01, 15-00, 15A03, 15A21
Library of Congress Cataloging-in-Publication DataShaska, Tanush.
Algjebra Lineare/Shaska Tanush.Includes bibliographical references and index.ISBN-13: 978-0-97545-414-5ISBN-10: 0-9754541-4-5
©2010 AulonnaPress:All rights reserved. This book can not be translated or copied in whole or in part without the written con-sent of the publisher (AulonnaPress, 8902 El Dorado, White Lake, MI, 48386). Use in connection with anyform of information storage and retrieval, electronic adaptation, computer software, or similar known orunknown technology is forbidden. Any use of this book without written permission of the publisher willbe prosecuted to the full extent of the law.
©2010 AulonnaPress:Të gjitha të drejtat e rezervuara. Ky libër nuk mund të përkthehet ose kopjohet pjesërisht ose i gjithë palejen e shkruar të botuesit (AulonnaPress, 8902 El Dorado, White Lake, MI, 48386). Përdorimi i materi-alit të këtij libri në çdo lloj forme, adoptim elektronic, software, or forma të ngjashme të njohura ose tëpanjohura është plotësisht i ndaluar. Çdo lloj përdorimi i këtij libri pa lejen e shkruar të botuesit do tëdënohet me forcën e plotë te ligjit sipas standarteve ndërkombëtare.
Second Edition: 2010
ISBN-13: 978-0-97545-414-5ISBN-10: 0-9754541-4-5

Përmbajta
1 Vektorët, matricat dhe sistemet lineare 151.1 Hapësira Euklidiane Rn . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 151.2 Norma e një vektori dhe produkti skalar . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 181.3 Matricat dhe algjebra e tyre . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 211.4 Sistemet lineare të ekuacioneve, metoda e Gaussit . . . . . . . . . . . . . . . . . . . . . . . . 26
1.4.1 Veprimet elementare me rradhët . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 281.4.2 Forma row-eçelon . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 28
1.5 Forma e reduktuar row-eçelon, metoda Gauss-Xhordan . . . . . . . . . . . . . . . . . . . . . 321.5.1 Disa njohuri për sistemet homogjene . . . . . . . . . . . . . . . . . . . . . . . . . . . . 341.5.2 Të përshkruajmë bashkësinë e zgjidhjeve . . . . . . . . . . . . . . . . . . . . . . . . . . 36
1.6 Matricat e anasjellta . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 431.6.1 Llogaritja e matricave të anasjellta duke përdorur formën row-eçelon . . . . . . . . . 44
2 Hapësirat vektoriale 512.1 Përkufizimi i hapësirave vektoriale . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 51
2.1.1 Vektorët linearisht të pavarur . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 542.2 Bazat dhe dimensionet . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 56
2.2.1 Një bazë për Matn×n(R) . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 592.2.2 Gjetja e bazës e një nënhapësire në kn . . . . . . . . . . . . . . . . . . . . . . . . . . . 59
2.3 Hapësira nul dhe rangu i një matrice . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 632.3.1 Gjetja e një baze për hapësirat-rresht, hapësirat-kolonë dhe hapësira nul e një matrice. 65
2.4 Shuma, shuma direkte dhe prodhimi direkt . . . . . . . . . . . . . . . . . . . . . . . . . . . . 682.4.1 Shumat direkte . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 692.4.2 Prodhimi direkt . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 70
2.5 Funksionet lineare ndërmjet hapësirave vektoriale . . . . . . . . . . . . . . . . . . . . . . . . 722.5.1 Kompozimi i funksionëve linear, funksionëve të anasjelltë, izomorfizmave . . . . . . 75
2.6 Matricat e shoqëruara me funksionet lineare . . . . . . . . . . . . . . . . . . . . . . . . . . . . 772.7 Ndryshimi i bazave . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 822.8 Ushtrime përsëritje . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 86
3 Përcaktorët, eigenvlerat, eigenvektorët 893.1 Përcaktorët . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 89
3.1.1 Llogaritja e përcaktorëve . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 943.2 Rregulli i Kramerit dhe matricat axhoint . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 96
3.2.1 Axhoint-ët e matricave . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 98
iii

iv PËRMBAJTA
3.3 Eigenvlerat, eigenvektorët dhe eigenhapësirat . . . . . . . . . . . . . . . . . . . . . . . . . . . 1023.4 Metodat iterative për gjetjen e eigenvlerave . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 107
3.4.1 Metoda fuqi . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1073.5 Matrica të ngjashme, diagonalizimi i matricave. . . . . . . . . . . . . . . . . . . . . . . . . . . 107
3.5.1 Diagonalizimi i matricave . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1103.6 Ushtrime përsëritje . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 113
4 Format kanonike 1174.1 Vetitë elementare të polinomëve . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 117
4.1.1 Polinomët e pathjeshtueshëm . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1184.2 Matrica shoqeruese, polinomi minimal, forma normale e Smithit. . . . . . . . . . . . . . . . 1214.3 Forma racionale kanonike . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1274.4 Teorema e Caylay-Hamilton . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 129
4.4.1 Llogaritja e formës racionale kanonike . . . . . . . . . . . . . . . . . . . . . . . . . . . 1304.4.2 Llogaritja e matricës transformuese . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 130
4.5 Forma kanonike e Xhordanit . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1324.6 Ushtrime Përsëritje . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 138
5 Prodhimi i brendshëm dhe Ortogonaliteti 1415.1 Prodhimi i brendshëm . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 141
5.1.1 Prodhimi i brendshëm mbi numrat realë . . . . . . . . . . . . . . . . . . . . . . . . . . 1435.1.2 Prodhimet Hermitiane . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 143
5.2 Bazat ortogonale, proçesi i ortogonalizimit të Gram-Schmidt . . . . . . . . . . . . . . . . . . 1465.2.1 Algortimi i Gram-Schmidt . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 147
5.3 Teorema e Sylvesterit . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1505.4 Hapësira duale . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1515.5 Ushtrime përsëritje . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 153
6 Operatorët në hapësirat e brendshme 1556.1 Operatorët në hapësirat e brendshme . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1556.2 Operatorët Hermitian . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1566.3 Operatorët unitary . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 157
7 Aplikime të Algjebrës Lineare 1597.1 Aplikime në ekuacionet diferenciale . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 159
7.1.1 Sisteme homogjene të ekuacioneve lineare të rendit të parë . . . . . . . . . . . . . . . 1597.1.2 Ekuacionet diferenciale të rendit të n-të . . . . . . . . . . . . . . . . . . . . . . . . . . 1627.1.3 Metoda e variation të parametrave . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 163
7.2 Metoda e katrorëve më të vegjël . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1667.2.1 Metoda e katrorëve më të vegjël për polinomë me grada më të larta . . . . . . . . . . 170
A Numrat kompleksë 177A.1 Numrat kompleksë . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 177
A.1.1 Interpretimi gjeometrik i numrit kompleks . . . . . . . . . . . . . . . . . . . . . . . . . 178

Figurat
1.1 Hapësira Euklidiane R3. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 151.2 Mbledhja dhe shumëzimi skalar i vektorëve. . . . . . . . . . . . . . . . . . . . . . . . . . . . . 161.3 Projeksioni i v në u . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 201.4 Prerja e dy drejtëzave x − y =−1 dhe 3x + y = 9 është një pikë e vetme. . . . . . . . . . . . . 30
4.1 Matrica në formën e Xhordanit. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 134
7.1 Duke i përputhur të dhënat e mësipërme me metodën e katrorëve më të vegjël. . . . . . . . 1697.2 Përputhim të dhënat e mësipërme me anë të metodës katrorëve më të vegjël. . . . . . . . . 1717.3 Përputhim të dhënat me një polinom të gradës 4 . . . . . . . . . . . . . . . . . . . . . . . . . 1727.4 Përputhim të dhënat me një polinom të gradës 4 . . . . . . . . . . . . . . . . . . . . . . . . . 173
v

vi FIGURAT

Parathënie
Me përshtatjen e programeve të reja në Universitetin e Vlorës në degët e shkencave ekzakte dhe in-xhinierike u bë e nevojshme botimi i një libri të algjebrës lineare në Shqip. Ky libër është një kordinimi metodave llogaritëse dhe atyre teorike për të dhënë tek lexuesi një ide mbi aspektet teorike të algjbrëslineare dhe zbatimeve të saj në fushat e tjera. Rëndësi i është kushtuar pjesës algoritmike për t’u dhënëstudentëve një shije të implementimit të disa prej këtyre metodave.
Ne kemi qënë mjaft të kursyer në zgjedhjen e temave që u përfshin në këtë tekst për vet faktin se kylibër do të përdoret vetëm gjatë një semestri. Në fund të librit është një listë e gjatë e disa prej tekstevebashkëkohore dhe disa më historike për lexuesin, i cili do që të thellohet në fushën e algjbrës lineare.
Unë nuk pretendoj origjinalitetin e asnjë prej rezultateve të këtij libri, po është e pamundur të për-mendësh pas çdo rezultati autorin origjinal. Megjithatë, unë nxitoj të marr mbi vete çdo gabim që kylibër mund të ketë, pasi këto janë gabime të miat dhe në asnjë mënyrë të autorëve origjinalë. Të gjithavërejtjet e korrigjimet janë të mirëpritura e ndoshta do të më ndihmojnë në përgatitjen e një botimi tëdytë në të ardhmen.
Këto leksione janë shkruar kryesisht për studentët e vitit të parë e të dytë të universitetit për degëte matematikës, informatikës dhe inxhinierisë. Fillimet e tyre i kanë në vitin 2001-2003 kur unë dhashëdisa herë rresht lëndën e algjebrës lineare në University of California-Irvine. Në vitin 2004 u botua i pariversion i këtij libri në anglisht, i cili është përdorur si tekst në University of Idaho dhe Oakland University.Megjithëse ky libër është një përpjekje modeste e nivelit elementar, unë shpresoj se do të përmbushnevojat fillestare të studentëve të Univeritetit të Vlorës dhe mbarë Shqipërisë në degët e lartëpërmen-dura.
Dua të falenderoj departamentin e matematikës së University of California-Irvine, University of Idahodhe Oakland University që më krijuan mundësinë për të dhënë kursin e algjebrës lineare disa herë meradhë si edhe ish-studenten time Blerina Zykaj, e cila me durim dhe përkushtim ndihmoi për përkthimine këtyre leksioneve nga versioni i anglishtes.
Tanush ShaskaVlorë, 2008.
vii

viii FIGURAT

Kapitulli 1
Vektorët, matricat dhe sistemet lineare
Figura 1.1: Hapësira Euklidiane R3.
E nisim këtë kapitull me kon-ceptin e njohur të hapësirave Euklid-iane (p.sh. Rn). Normën dhe pro-duktin skalar të vektorëve do ti stu-diojmë në kreun e dytë. Më vonëdo të prezantojmë matricat dhe algje-brën e tyre. Përdorimi i matricavepër zgjidhjen e sistemeve lineare tëekuacioneve përfshin gjetjen e formësrow-eçelon dhe formën e reduktuarrow-eçelon të matricës. Këto proçesequhen algoritmi i Gaussit dhe algoritmiGauss-Xhordan, të cilat do ti studio-jmë në kreun 4 dhe 5. Në kreun 6do të studiojmë matricat e anasjelltadhe algoritmet për të gjetur këto ma-trica.
1.1 Hapësira EuklidianeRn
Ne njohim konceptin e një vektorinë planin e numrave realë R2. Fillim-isht ne do të përsërisim disa nga vetitë e vektorëve në R2 dhe pastaj do ti zgjerojmë këto koncepte nëRn .
Një vektor në R2 është një çift i renditur
v := (v1, v2), ku v1, v2 ∈R.
Për çdo dy vektorë u = (u1,u2), v = (v1, v2) përkufizojmë mbledhjen dhe shumëzimin skalar në të njëjtën
15

16 T. Shaska
mënyrë
u+v := (u1 + v1,u2 + v2),
r ·u := (r u1,r u2),(1.1)
ku r ∈R. Gjeometrikisht mbledhja e u dhe v dhe shumëzimi skalar r u përshkruhen si më poshtë:
~u
~v
~u +~v
~r u
~u
Figura 1.2: Mbledhja dhe shumëzimi skalar i vektorëve.
ku r u është një vektor i ri me të njëjtin drejtim si u dhe me gjatësi r shumëzuar me gjatësinë e u-së.Një hapësirë Euklidiane është bashkësia
Rn := {(x1, . . . , xn) | xi ∈R}
ku mbledhja dhe shumëzimi skalar janë të përkufizuar si më poshtë.Për çdo u,v ∈Rn të tillë që
u = (u1, . . . ,un), v = (v1, . . . , vn) (1.2)
përkufizojmë
u+v := (u1 + v1, . . . ,un + vn)
r v := (r v1, . . . ,r vn).(1.3)
Elementët e Rn quhen vektorë dhe elementët r ∈R quhen skalarë. Vektori
0 = (0, . . . ,0)
quhet vektori zero. Kemi vetitë e mëposhtme.
Teorema 1.1. Le të jenë u,v,w vektorë në Rn dhe r, s skalar në R. Pohimet e mëposhtme janë të vërteta:
1) (u+v)+w = u+ (v+w),2) u+v = v+u,3) 0+u = u+0 = u,4) u+ (−u) = 0,

1.1. HAPËSIRA EUKLIDIANE RN 17
5) r (u+v) = r u+ r v,6) (r + s)u = r u+ s u,7) (r s)u = r (s u),8) 1u = u.
Vërtetim: Vërtetimet i lihen lexuesit si ushtrime.Dy vektorë v = (v1, . . . , vn) dhe u = (u1, . . . ,un) quhen vektorë paralelë në qoftë se ekziston një r ∈R e tillëqë v = r u.
Përkufizim 1.1. Janë dhënë vektorët v1, . . . ,vn ∈Rn dhe r1, . . . ,rn ∈R, vektori
r1v1 +·· ·+ rn vn
quhet kombinim linear i vektorëve v1, . . . , vn .
Përkufizim 1.2. Le të jenë v1, . . . ,vn vektorë në Rn . Hapësira e gjeneruar nga këta vektorë e shënuar meSpan (v1, . . . ,vn), është bashkësia në Rn e të gjitha kombinimeve lineare të v1, . . . ,vn .
Span (v1, . . . ,vn) = {r1v1 +·· ·+ rn vn | ri ∈R}
Përkufizim 1.3. Vektorët u1, . . . ,un quhen linearisht të pavarur në qoftë se
r1u1 +·· ·+ rn un = 0
si rrjedhimr1 = ·· · = rn = 0,
në të kundërt, themi se u1, . . . ,un janë linearisht të varur.
Ushtrime:
1. Vërteto se përkufizimi formal i mbledhjes dhe shumëzimit skalar në R2 pajtohet me interpretimingjeometrik të mbledhjes dhe shumëzimit të vektorëve.
2. Le të jenë v = (3,5,−1), u = (1,1,7) dhe w = (0,3,4). Gjej 2u+3v−w.
3. Le të jenë dhënë v = (1,2,−1), u = (3,6,−6). Gjej 2u+3v.
4. Le të jenë dhënë v = (3,5) dhe u = (5,6). Gjej skalarët r, s të tillë që r v+ s u = (5,11).
5. Çfarë domethënë për vektorët u,v ∈R2 të jenë linearisht të varur?
6. Çfarë është span i (0,1) dhe (1,0) në R2?
7. Le të jenë dhënë u = (1,2,0) dhe v = (3,4,0). A mund të jetë w = (1,1,1) një kombinim linear i u dhe v?Çfarë është gjeometrikisht spani i u dhe v?
8. Gjej sipërfaqen e trekëndëshit të përcaktuar nga vektorët u = (1,2,2) dhe v = (2,2,−3).
9. A është trekëndëshi me kulme A = (1,−3,−2), B = (2,0,−4), dhe C = (6,−2,−5) këndrejtë?
10. Le të jetë c një numër realë pozitiv dhe O1, O2 pika në planin x y me koordinata (c,0) dhe (−c,0)respektivisht. Gjej një ekuacion i cili përshkruan të gjitha pikat P të planit x y të tilla që
|| →PO1||+ || →
PO2|| = 2a,
për a > c.

18 T. Shaska
1.2 Norma e një vektori dhe produkti skalar
Tani do të studiojmë dy koncepte shumë të rëndësishme të hapësirave Euklidiane; atë të produktitskalar dhe normës. Konceptin e produktit skalar do ta përgjithësojmë në Kap 4 për çdo hapësirë vektori-ale.
Përkufizim 1.4. Le të jetë dhënë u := (u1, . . . ,un) ∈ Rn . Norma e u-së, e shënuar me ‖u‖, përkufizohet simë poshtë
‖u‖ =√
u21 +·· ·+u2
n
Norma ka vetitë e mëposhtme:
Teorema 1.2. Për çdo dy vektorë u,v ∈Rn dhe çdo skalar r ∈R pohimet e mëposhtme janë të vërteta:i) ‖u‖ ≥ 0 dhe ‖u‖ = 0 atëherë dhe vetëm atëherë kur u = 0ii) ‖r u‖ = |r |‖u‖iii) ‖u+v‖ ≤ ‖u‖+‖u‖
Vërtetim: Vërtetimet e pikave i) dhe ii) janë të thjeshta dhe janë lënë si ushtrime. Vërtetimi i pikës iii)bëhet në Lemën 1.1.
Një vektor njësi ështe një vektor me normë 1. Kini parasysh se për çdo vektor jo-zero u vektori u‖u‖
është vektor njësi.
Përkufizim 1.5. Le të jenëu := (u1, . . . ,un), v := (v1, . . . , vn)
vektorë në Rn . Produkti skalar i u dhe v (ndonjëherë quhet produkt i brendshëm) përkufizohet si mëposhtë:
u ·v := u1v1 +·· ·+un vn ,
dhe ndonjëherë shënohet me ⟨u,v⟩.Identiteti i mëposhtëm
‖v‖2 = v ·v
është shumë i rëndesishëm në ushtrime.
Lema 1.1. Produkti skalar ka vetitë e mëposhtme:i) u ·v = v ·uii) u · (v+w) = u ·v+u ·wiii) r (u ·v) = (r u) ·v = u · (r v)iv) u ·u ≥ 0, dhe u ·u = 0 atëherë dhe vetëm atëherë kur u = 0
Vërtetim: Përdor përkufizimin e produktit skalar për të kontrolluar i) deri iv).Dy vektorë u,v ∈Rn quhen pingulë në qoftë se
u ·v = 0.
Lema 1.2. (Inekuacioni Koshi-Schwarc) Le të jenë u dhe v dy vektorë në Rn . Atëherë
|u ·v| ≤ ||u|| ||v||

1.2. NORMA E NJË VEKTORI DHE PRODUKTI SKALAR 19
Vërtetim: Në qoftë se një nga vektorët është vektori zero, atëherë inekuacioni është i qartë. Pra, supozo-jmë se u,v janë vektorë jozero.
Për çdo r, s ∈Rn kemi ‖r v+ su‖ ≥ 0. Atëherë,
‖r v+ su‖2 = (r v+ su) · (r v+ su)
= r 2 (v ·v)+2r s (v ·u)+ s2 (u ·u) ≥ 0
Marrim r = u ·u dhe s =−v ·u. Duke zëvendësuar në shprehjen e mësipërme, kemi:
‖r v+ su‖2 = (u ·u)2 (v ·v)−2(u ·u) (v ·u)2 + (v ·u)2 (u ·u)
= (u ·u)[(u ·u)(v ·v)− (v ·u)2]≥ 0
Meqënëse (u ·u) = ‖u‖2 > 0 atëherë[(u ·u)(v ·v)− (v ·u)2
]≥ 0. Kështu që,
(v ·u)2 ≤ (u ·u) (v ·v) = ‖u‖2 · ‖v‖2
dhe|u ·v| ≤ ||u|| · ||v||.
Lema 1.3. (Inekuacioni i trekëndëshit ) Për çdo dy vektorë v,u në Rn kemi
‖v+u‖ ≤ ‖v‖+‖u‖Vërtetim: Kemi
‖v+u‖2 = (v+u) · (v+u)
= (v ·v)+2(v ·u)+ (u ·u) ≤ (v ·v)+2‖v‖‖u‖+ (u ·u)
= ‖v‖2 +2‖v‖ ·‖u‖+‖u‖2 = (‖v‖+‖u‖)2
Kështu që, ‖v+u‖ ≤ ‖v‖+‖u‖.
Përkufizim 1.6. Këndi ndërmjet dy vektorëve u dhe v është
θ := cos−1(
u ·v
‖u‖ ·‖v‖)
Vini re se, meqënëse u‖u‖ , v
‖v‖ janë vektorë njësi, atëherë
−1 ≤ u ·v
‖u‖ ·‖v‖ ≤ 1.
Kështu që, këndi ndërmjet dy vektorëve është i mirëpërcaktuar.
Shembull 1.1. Gjej këndin ndërmjet
u = (2,−1,2), dhe v = (−1,−1,1)
Zgjidhje: Duke përdorur formulën e mësipërme, kemi
θ= cos−1(
(2,−1,2) · (−1,−1,1)p9 ·p3
)= cos−1
(p3
9
).
Atëherë θ≈ 1.377 radianë ose θ≈ 78.90◦.

20 T. Shaska
~v
~u
~u −~v~x
pr o j~u~vA
B
C
Figura 1.3: Projeksioni i v në u
Marrim vektorët u dhe v në R2 si në Fig 1.3. Projeksioni i v-së në u, i cili shënohet me pruv, ështëvektori i përfituar duke hequr një pingule nga kulmi i v-së në drejtëzën e përcaktuar nga u. Kështu që,
‖ pruv‖ := ‖ →AO‖ = ||v|| ·cos(CAB) = ||v|| · ⟨u,v⟩
||u|| · ||v|| =⟨v,u⟩⟨u,u⟩ · ||u||.
Mund të shumëzojmë me vektorin njësi u‖u‖ për të marrë
pruv = ⟨v,u⟩⟨u,u⟩ ·u.
Në qoftë se do të donim një vektor pingul me u, atëherë kemi:
x = v−pruv = v− ⟨v,u⟩⟨u,u⟩ ·u.
Do të shohim në vazhdim se si kjo ide është e përgjithësuar në Rn përdoret në metodën katrorëve më tëvegjël.
Ushtrime:
11. Le të jetë 4 ABC një trekëndësh i dhënë dhe θ këndi ndërmjet AB dhe AC. Vërteto ligjin e kosinusit nënjë trekëndësh
BC2 = AB2 +AC2 −2 AB ·AC ·cosθ
12. Vërteto se për çdo dy vektorë u dhe v pohimi i mëposhtëm është i vërtetë
(v−w) · (v+w) = 0 ⇐⇒ ||v|| = ||w||13. Le të jenë a dhe b brinjët anësore të një paralelogrami dhe diagonalet e tij d1,d2. Vërteto se,
d 21 +d 2
2 = 2(a2 +b2).
14. Vërteto se dy diagonalet e një paralelogrami janë pingule atëherë dhe vetëm atëherë kur të gjitha brin-jët e tij janë të barabarta.

1.3. MATRICAT DHE ALGJEBRA E TYRE 21
15. Gjej këndin ndërmjet vektorëve u = (1,2,2) dhe v = (2,2,−3) dhe sipërfaqen e trekëndëshit të përcak-tuar prej tyre.
16. Le të jetë u vektori njësi, tangent me grafikun e y = x2+1 në pikën (2,5). Gjej një vektor v pingul me u.
17. Për cilat vlera të t-së vektorët u = (1,0, t ) dhe v = (t ,−t , t 2) janë pingulë?
18. Vërteto se distanca d e një pike P = (x0, y0) nga drejtëza
ax +by + c = 0
jepet prej
d = |ax0 +by0 + c|pa2 +b2
.
19. Le të jenë vektorët u,v,w me të njëjtën origjinë në R3 dhe koordinata u = (1,2,2), v = (2,2,−3) dhew = (−1,−1,−1). Gjej vëllimin e paralelopipedit të përcaktuar nga u,v,w.
20. Le të jenë u = (1,2,2) dhe v = (1,2,−3) vektorë të dhënë. Gjej projeksionin e u-së në v.
21. Le të jenë u = (1,2,2), v = (2,2,−3) dhe w = (−1,−1,−1) të dhënë në R3. Gjej projeksionin e u në planinvw.
1.3 Matricat dhe algjebra e tyre
Fillojmë me një problem klasik, zgjidhjen e sistemeve lineare. Le të jetë dhënë sistemi i mëposhtëmlinear i ekuacioneve {
3x +12y = 5
2x −2y = 3(1.4)
Zgjidhja e këtij sistemi varet nga koeficientët e çdo ekuacioni. Krijojmë një tabelë me të gjithë koeficientëte këtij sistemi, si më poshtë
A =[
3 122 -2
](1.5)
dhe e quajmë një matricë 2×2.Në përgjithësi, një matricë A m×n është një bashkësi numrash të vendosur në m rreshta dhe n kolona
dhe paraqitet si më poshtë:
A = [ai , j ] =
a1,1 a1,2 a1,3 . . . a1,n
a2,1 a2,2 a2,3 . . . a2,n
a3,1 a3,2 a3,3 . . . a3,n
···
am,1 am,2 am,3 . . . am,n
(1.6)

22 T. Shaska
Rreshti i i -të i A-së është vektori
Ri := (ai ,1, . . . , ai ,n)
dhe kolona e j -të është vektori
C j :=
a1, j
· · ·· · ·
an, j
Le të jetë A = [ai , j ] një matricë m ×n dhe B = [bi , j ] një matricë n × s. Matrica prodhim AB është matricaC = [ci , j ] me përmasa m × s e tillë që ci , j është prodhimi skalar i vektorit të rreshtit të i-të të A-së dhevektorit të kolonës së j-të të B-së.
a11 a12 . . . a1p
a21 a22 . . . a2p
......
. . ....
an1 an2 . . . anp
A : n rreshta p kollona
b11 b12 . . . b1q
b21 b22 . . . b2q
......
. . ....
bp1 bp2 . . . bpq
B : p rradhë q kollona
c11 c12 . . . c1q
c21 c22 . . . c2q
......
. . ....
cn1 cn2 . . . cnq
a 21×b 12
a 22×b 22
a 2p×b p2
+
+ . . .+
C = A×B : n rreshta q kollona
Matrica shumë përkufizohet si
A+B = [ai , j +bi , j
].

1.3. MATRICAT DHE ALGJEBRA E TYRE 23
dhe shumëzimi me një skalar r ∈R përkufizohet si matrica
r A := [r ai , j ].
Matrica zero m ×n, shënohet me 0, është matrica m ×n, e cila ka zero në të gjithë elementët e tij.Një matricë A m ×n quhet matricë katrore në qoftë se m = n. Në qoftë se A = [ai , j ] është një matricë,atëherë të gjitha elementët ai ,i formojnë diagonalen kryesore të A-së.
Matrica identike, e shënuar me In , është matrica n ×n, e cila ka 1-sha në diagonalen kryesore dhezero në vendet e tjera. Një matricë e cila mund të shkruhet si r I quhet një matricë skalare.
Dy matrica quhen të barabarta në qoftë se elementët koresponduese të tyre janë të njëjta. Kiniparasysh se aritmetika e matricave nuk është e njëjte me aritmetikën e numrave. Për shembull, nëpërgjithësi AB 6= BA, ose AB = 0 nuk sjell si rrjedhim se A = 0 ose B = 0. Ne do ti studiojmë disa nga këtoveti me hollësi në seksionet në vazhdim. Më poshtë paraqesim vetitë kryesore të algjebrës së matricave.
Teorema 1.3. Le të jenë A,B,C matrica të përmasave të tilla që veprimet e mëposhtme janë të përcaktuara.Le të jenë r, s skalarë. Atëherë pohimet e mëposhtme janë të vërteta:
i) A+B = B+Aii) (A+B)+C = A+ (B+C)iii) A+0 = 0+A = Aiv) r (A+B) = r A+ r Bv) (r + s)A = r A+ sAvi) (r s)A = r (sA)vii) (r A)B = A(r B) = r (AB)viii) A(BC) = (AB)Cix) IA = A = AIx) A(B+C) = AB+ACxi) (A+B)C = AC+BC
Vërtetim: Shumë prej vërtetimeve janë elementare dhe ne do ti lëmë si ushtrime për lexuesin.Trace e një matrice katrore A = [ai , j ] është shuma e elementëve të diagonales së saj:
tr (A) := a11 +·· ·+ann .
Lema 1.4. Pohimet e mëposhtme janë të vërteta:i) tr (A+B) = tr (A)+ tr (B)ii) tr (AB) = tr (BA).
Vërtetim: Pika e parë është e qartë. Ne do vërtetojmë vetëm pikën ii). Le të jenë A = [ai , j ] dhe B = [bi , j ]matrica n ×n. Shënojmë AB = C = [ci , j ] dhe BA = D = [di , j ]. Atëherë
ci ,i = Ri (A) ·Ci (B) = Ci (B) ·Ri (A) = di ,i ,
ku Ri (A) është rreshti i i -të i A-së dhe Ci (B) është kolona e i -të e B-së. Kjo plotëson vërtetimin.

24 T. Shaska
Shembull 1.2. Për matricat A dhe B të dhëna më poshtë, gjej tr (A), t r (B), t r (A+B), t r (AB) dhe tr (BA).
A = 4 2 2
0 3 121 10 -2
, B = 1 2 61
3 -3 131 2 1
Zgjidhje: Eshtë e qartë se tr (A) = 5, t r (B) =−1. Atëherë, tr (A+B) = 4. Kemi
AB = 74 6 248
41 -7 4-13 8 1289
.
Kështu që, tr (AB) = tr (BA) = 1356.
Në qoftë se kemi matricën A = [ai , j ], e transpozuara e saj është matrica
At := [a j ,i ].
A quhet matricë simetrike në qoftë se A = At . Kini parasysh se për një matricë katrore A e transpozuarae saj përfitohet duke e rrotulluar matricën rrotull diagonales së saj.
Lema 1.5. Për çdo matricë A pohimet e mëposhtme janë të vërtetai) (At )t = A,ii) (A+B)t = At +Bt ,iii) (AB)t = Bt At .
Vërtetim: Pikat i) dhe ii) janë të lehta. Ne do vërtetojmë vetëm pikën iii). Le të jenë A = [ai , j ] dhe B =[bi , j ]. Shënojmë AB = [ci , j ]. Atëherë, (AB)t = [c j ,i ] ku
c j ,i = R j (A) ·Ci (B) = C j (At ) ·Ri (Bt ) = Ri (Bt ) ·C j (At ).
Kjo plotëson vërtetimin.
Shembull 1.3. Për matricat A dhe B të dhëna më poshtë
A = 4 2 2
0 3 121 10 -2
, B = 1 2 61
3 -3 131 2 1
gjej At , Bt , (A+B)t , (AB)t , dhe (BA)t .
Zgjidhje: Kemi
At = 4 0 21
2 3 102 1 -2
, Bt = 1 3 31
2 -3 261 1 1
.
Llogaritja e (A+B)t , (AB)t , dhe (BA)t e kemi lënë si ushtrim për lexuesin.
Le të jetë A një matricë katrore. Në qoftë se ekziston një numër i plotë n i tillë që An = I, atëherë themise A ka rend të fundëm, në të kundërt A ka rend të pafundëm. Numri më i vogël i plotë n i tillë që An = Iquhet rend i A-së.
Ushtrime:

1.3. MATRICAT DHE ALGJEBRA E TYRE 25
22. Gjej trace-në e matricave A, B, A+B, dhe A−B, ku A dhe B janë
A = 4 2 2
0 3 121 10 -1
, B = 1 2 6
3 -3 131 0 13
23. Një matricë A quhet idempotent në qoftë se A2 = A. Gjej një matricë idempotent A, 2×2, të ndryshmenga matrica identike I2. Duke përdorur matricën A, gjej dy matrica B,C të tilla që BC = 0, ku B 6= 0 dheC 6= 0.
24. Le të jetë
A =[
cosθ −sinθsinθ cosθ
]Gjej A2. Ç’mund të thoni për An?
25. Një matricë katrore A është nilpotent në qoftë se ekziston një numër i plotë r ≥ 1 i tillë që Ar = 0. Letë jenë A,B dy matrica të tilla që AB = BA, A2 = 0 dhe B2 = 0. Vërteto se AB dhe A+B janë nilpotente.
26. Le të jetë
A = 4 2 2
0 3 12 0 1
Nëse është e mundur, gjej një matricë B të tillë që AB = 2A.
27. Vërteto se: i) Për çdo matricë A, matrica AAt është simetrike ii) Në qoftë se A është një matricë katroreatëherë A+At është simetrike.
28. Le të jetë A një matricë katrore. Vërteto se (An)t = (At )n .
29. A është i vërtetë identiteti(A+B)2 = A2 +2AB+B2,
për çdo dy m ×n matrica A dhe B.
30. Le të jenë A dhe B dy matrica të tilla që AB = BA. Vërteto se
(A−B)(A+B) = A2 −B2.
31. Le të jenë A dhe B dy matrica të tilla që AB = BA. Vërteto se
(A−B)(A2 +AB+B2) = A3 −B3.

26 T. Shaska
32. Le të jetë Q bashkësia e mëposhtme e matricave
±[
1 00 1
], ±
[i 00 -i
], ±
[0 1
-1 0
], ±
[0 ii 0
]e tillë që i 2 =−1. Për më tepër, le të jenë
I =[
1 00 1
], i =
[i 00 -i
], j =
[0 1
-1 0
], k =
[0 ii 0
].
Vërteto pohimet e mëposhtmei2 = j2 = k2 =−I
dheij = k, jk = i, ji =−k, kj =−i, ik =−j.
Këto matrica ndonjë herë quhen kuaternione. Vërteto se ±i, ±j, ±k kanë rend 4.
1.4 Sistemet lineare të ekuacioneve, metoda e Gaussit
Përkufizim 1.7. Një ekuacion linear me ndryshore (x1, x2, . . . , xn) ka formën
a1x1 +a2x2 +a3x3 +·· ·+an xn = d ,
ku numrat a1, . . . , an ∈ ℜ janë koeficientët e ekuacionit dhe d ∈ ℜ është një konstante. n-elementët erradhitur (s1, s2, . . . , sn) ∈ℜn janë zgjidhje e ekuacionit në qoftë se duke zvendësuar numrat s1, . . . , sn nëvend të ndryshorëve, atëherë ai kthehet në një barazim numerik të vërtetë: a1s1 +a2s2 + . . .+an sn = d .
Një sistem linear ekuacionesh a1,1x1 +·· ·+a1,n xn = b1
a2,1x1 +·· ·+a2,n xn = b2
. . . . . . . . . . . . . . . . . . . . . . . .
am,1x1 +·· ·+am,n xn = bm
ka zgjidhje (s1, s2, . . . , sn) në qoftë se n-elementët e radhitur janë zgjidhje e të gjithë ekuacioneve të sis-temit.
Le të jetë dhënë një sistem linear m ekuacionesh me n të panjohura si më sipër. E shkruajmë këtësistem në formën e matricës së më poshtme
A ·x = b
ku
A = [ai , j ] =
a1,1 a1,2 a1,3 . . . a1,n
a2,1 a2,2 a2,3 . . . a2,n
a3,1 a3,2 a3,3 . . . a3,n
···
am,1 am,2 am,3 . . . am,n
, x =
x1
x2
x3
xm
, b =
b1
b2
b3
bm
.

1.4. SISTEMET LINEARE TË EKUACIONEVE, METODA E GAUSSIT 27
Ne do përdorim matricat dhe do ndërtojmë një algoritëm, i cili mund të përcaktojë nëse një sistem i tillëka zgjidhje dhe të gjejmë këtë zgjidhje. Matrica [A | b] shënohet si më poshtë:
[A | b] :=
a1,1 a1,2 a1,3 . . . a1,n b1
a2,1 a2,2 a2,3 . . . a2,n b2
a3,1 a3,2 a3,3 . . . a3,n b3
· · .· · .· · .
am,1 am,2 am,3 . . . am,n bm
dhe quhet matrica e augmentuar e sistemit korespondues.
Shembull 1.4. Për të zgjidhur sistemin 3x3 = 9
x1 + 5x2 − 2x3 = 213 x1 + 2x2 = 3
ne e transformojmë atë derisa të arrijë në një formë që është më e lehtë për t’u zgjidhur.
këmbejmë rreshtin 1 me rreshtin 3−→
13 x1 + 2x2 = 3
x1 + 5x2 − 2x3 = 23x3 = 9
shumëzojmë rreshtin e parë me 3−→
x1 + 6x2 = 9x1 + 5x2 − 2x3 = 2
3x3 = 9
shtojmë në rreshtin e 2-të rreshtin e parë të shumëzuar me −1−→
x1 + 6x2 = 9−x2 − 2x3 =−7
3x3 = 9
Ky është transformimi i fundit që mund t’i kryejmë mbi këtë sistem, pasi në rreshtin e fundit ne mund tëmarrim një zgjidhje të ndryshme nga trivialja.
Tani mund të gjejmë vlerën e secilit prej ndryshorëve. Ekuacioni i fundit na jep x3 = 3. Duke zvendë-suar x3 = 3 në ekuacionin e dytë, gjejmë x2 = 1. Duke zvendësuar këto dy vlera në ekuacionin e parë gjejmëx1 = 3. Pra, sistemi ka një zgjidhje të vetme, e cila është: { (3,1,3)}.
Shumica e këtij seksioni si dhe shumë prej atyre vijues përmbajnë shembuj mbi zgjidhjen e sistemevelinear me metodën e Gaus-it, e cila është një metodë e shpejt dhe e thjeshtë. Para se të japim këta shem-buj, ne do të tregojmë se kjo metodë është e sigurt, dmth ajo asnjëherë nuk humbet ndonjë zgjidhje tësistemit apo të na jap ndonjë zgjidhje të huaj.
Teorema 1.4 (Metoda e Gausit). Në qoftë se një sistem ekuacionesh linear shndërrohet në një sistem tjetërsipas veprimeve të mëposhtme:
1) një ekuacion ndërron vendin me një tjetër2) të dy anët e një ekuacioni shumëzohen me një konstante jo-zero3) një ekuacione zvendësohet me shumën e tij me shumëfishin e një ekuacioni tjetër,
atëherë këta dy sisteme linear ekuacionesh kanë të njëjtën bashkësi zgjidhjeje.

28 T. Shaska
Secili prej këtyre verpimeve ka një kufi. Nuk lejohet shumëzimi i një rreshti me 0 sepse ky veprimmund të ndryshoi bashkësinë e zgjidhjeve të sistemit. Gjithashtu, ndalohet edhe shuma e një rreshti menjë shumëfish të vet sepse duke i shtuar një rreshti veten e vet të shumëzuar me −1 është njëlloj sikurkëtë rresht ta shumëzosh me 0.
1.4.1 Veprimet elementare me rradhët
Do të përpunojmë matricën e augmentuar [A | b] në mënyrë të tillë që bashkësia e zgjidhjeve të sis-temit linear të mos ndryshojë. Shënojmë me veprime elementare me rradhët (rreshtat) që kryhen nënjë matricë, veprimet e mëposhtme:1) Këmbe rradhën e i-të me rradhën e j-të (shënohet me Ri ↔ R j )
2) Shumëzo rradhën e i-të me një skalar jozero r (shënohet me Ri → r Ri )3) Mblidh rradhën e i-të me rradhën e j-të shumëzuar me r (shënohet me Ri → Ri + r R j )
Eshtë e qartë se këto veprime matricën e augmentuar nuk e ndryshojnë bashkësinë e zgjidhjeve tëkëtij sistemi. Në qoftë se matrica B përfitohet duke kryer veprimet me rradhët në A atëherë matrica Adhe B quhen equivalente sipas rradhëve .
1.4.2 Forma row-eçelon
Përkufizim 1.8. Një matricë është në formën row-eçelon në qoftë se :
1) Të gjitha rreshtat që kanë vetëm zero janë poshtë rreshtave me elementë jozero.2) Elementi i parë jozero në një rresht i korespondon kolonës në të djathtë të elementit të parë jo-zero
në të gjithë rreshtat në vazhdim.
Për një matricë në formën row-eçelon, elementi i parë jozero në një rresht quhet pivoti për atë rresht.
Shembull 1.5. Duke përdorur veprimet me radhët, gjej formën row-eçelon të matricës
A = 1 2 3
2 0 13 2 2
Zgjidhje: Kryejmë veprimet e mëposhtme me rreshtat:
A =1 2 3
2 0 13 2 2
R2→ 12 R2−→
1 2 31 0 1
23 2 2
R2→R1−R2−→1 2 3
0 2 52
3 2 2
R3→ 13 R3−→
1 2 30 2 5
21 2
323
R3→R1−R3−→1 2 3
0 2 52
0 43
73
R3→R2− 32 R3−→
1 2 30 2 5
20 0 −1
Veprimet me rreshtat janë veprime të shpejta dhe të lehta. Më poshtë japim algoritmin sesi të transfor-mojmë një matricë në formën row-eçelon.

1.4. SISTEMET LINEARE TË EKUACIONEVE, METODA E GAUSSIT 29
Algorithm 1. Input: Një matricë A.Output: Forma row-eçelon e A-së1) Fillojmë me kolonën e parë e cila ka elementë jozero.
2) Duke këmbyer vendet e rreshtave marrim një pivot p në rreshtin e parë të kësaj kolone. I bëjmëzero të gjithë elementët poshtë pivotit të kësaj kolone.
3) Vazhdojmë në këtë mënyrë me kolonën tjetër.
Forma row-eçelon e matricave përdoret për të zgjidhur sistemet lineare të ekuacioneve. Le të jetë Ax = b,një sistem linear ekuacionesh. Krijojmë matricën e augmentuar [A | b] dhe gjejmë formën e saj row-eçelon, themi [H | v.] Duke përdorur metodën e zëvendësimit nga fundi (fillojmë zëvendësimin ngarreshti i fundit) zgjidhim sistemin
Hx = v.
Shohim një shembull.
Shembull 1.6. Zgjidh sistemin linear x2 −3x3 =−5
2x1 +3x2 −x3 = 7
4x1 +5x2 −2x3 = 10
Zgjidhje: Atëherë
[A | b] = 0 1 -3 -5
2 3 -1 74 5 -2 10
[H | v] = 2 3 -1 7
0 1 -3 -50 0 -3 -9
duke bërë veprimet R1 ↔ R2, R3 → R3 −2R1, R3 → R3 +R2. Kështu që sistemi linear është ekuivalent mesistemin e mëposhtëm
2x1 +3x2 −x3 = 7
x2 −3x3 =−5
−3x3 =−9
duke përdorur metodën e zëvendësimit nga fundi, kemi:
x = -1
43
Kjo metodë njihet si metoda e Gaussit.
Teorema 1.5. Le të jetëAx = b
një sistem linear dhe [A | b] [H | v], ku [H | v] është në formën row-eçelon. Atëherë një nga pohimet emëposhtën është i vërtetë:
1) Ax = b nuk ka zgjidhje atëherë dhe vetëm atëherë kur H ka një rradhë me të gjithë elementët zerodhe në të njëjtën rradhë c ka një element jozero.
2) Në qoftë se Ax = b ka zgjidhje atëherë një nga pohimet e mëposhtme qëndron:i) ka një zgjidhje të vetme në qoftë se çdo kolonë e H-së përmban një pivotii) ka një numër të pafundëm zgjidhjesh në qoftë se një nga kolonat e H-së nuk ka pivot

30 T. Shaska
Figura 1.4: Prerja e dy drejtëzave x − y =−1 dhe 3x + y = 9 është një pikë e vetme.
Vërtetim: Kujtojmë nga algjebra elementare se një equacion
ax = b
nuk ka zgjidhje atëherë dhe vetëm atëherë kur a = 0 dhe b 6= 0. Ka një zgjidhje të vetme atëherë dhevetëm atëherë kur a 6= 0 dhe b 6= 0 dhe ka një numër të pafundëm zgjidhjesh atëherë dhe vetëm atëherëkur a = b = 0.
Në qoftë se H ka një rresht zerosh dhe në të njëjtin rresht c ka një element jozero cn 6= 0 atëherëekuacioni
0 · xn = cn
nuk ka zgjidhje dhe si rrjedhim sistemi linear Ax = b nuk ka zgjidhje. Edhe e anasjellta është e vërtete sirrjedhim i përkufizimit të formës row-eçelon. Si rrjedhim, pikat 2, i) dhe 2, ii) janë të vërteta
Shembull 1.7. Gjej sa zgjidhje ka sistemi i mëposhtëm:{2x +5y = 3
6x +15y = 9
Zgjidhje: Matrica e augmentuar është
[A | b] =[
2 5 36 15 9
] [H | v] =
[2 5 20 0 0
]Nga teorema e mësipërme, sistemi ka një numër të pafundëm zgjidhjesh. Kjo është e thjeshtë për tu vërtet-uar meqënëse ekuacioni i dytë i sistemit është prodhimi i ekuacionit të parë me numrin 3.
Teorema e mësipërme mund të interpretohet gjeometrikisht për rastet e matricave me koeficientë 2nga 2 ose 3 nga 3. Për shembull, në rastin e një sistemi linear me 2 ekuacione dhe 2 ndryshore, kemirastin e dy drejtëzave në plan. Eshtë e njohur nga gjeometria se dy drejtëza mund të priten në një pikë,asnjë pikë ose në një numër të pafundëm pikash.

1.4. SISTEMET LINEARE TË EKUACIONEVE, METODA E GAUSSIT 31
Ushtrime:
Zgjidhni sistemet lineare duke përdorur metodën e zëvendësimit të Gausit.
33.
34. {x +5y = 2
3x +2y = 92x + y −3z = 0
6x + y −8z = 0
2x − y +5z =−4y −2z = 3
x +2y −3z = 2
5x −3y + z =−1
Gjeni formën row-eçelon të matricave të mëposhtme
35. 0 1 -3 -50 3 0 14 5 -2 10
36.
0 0 0 01 1 -3 -31 3 0 02 5 -2 1
37. Përcakto të gjitha vlerat e b1,b2 të tilla që sistemi i mëposhtëm të ketë zgjidhje{
x1 +11x2 = b1
3x1 +33x2 = b2
38. Përcakto të gjitha vlerat e b1,b2 të tilla që sistemi i mëposhtëm të mos ketë asnjë zgjidhje{x1 +2x2 = b1
−2x1 −4x2 = b2
39. Gjej a, b, dhe c të tilla që parabolay = ax2 +bx + c
të kalojë në pikat (1,-4), (-1,0), dhe (2,3).
40. Gjej a, b, c dhe d të tilla që polinomi i gradës së katërt
y = ax4 +bx3 + cx2 +d
të kalojë në pikat (3, 2), (-1, 6), (-2, 38), dhe (2, 6).

32 T. Shaska
41. Gjej polinomin që kalon nga pikat (3, 1, -2), (1, 4, 5) dhe (2, 1, -4).
Ushtrime programimi:
1. Shkruaj një program kompjuteri, i cili llogarit formën row-eçelon të një matrice të dhënë.
1.5 Forma e reduktuar row-eçelon, metoda Gauss-Xhordan
Le të jetë [A | b] një matricë në formë row-eçelon. A mund ti bëjmë transformime të tjera matricës[A | b] në mënyrë të tillë që zgjidhja e sistemit korespondues të lexohet në ekuacionin e matricës? Kjo naçon në përkufizimin e mëposhtëm:
Përkufizim 1.9. Një matricë është në formën e reduktuar row-eçelon në qoftë se është në formë row-eçelon, të gjithë pivotët janë 1 dhe të gjithë elementët mbi pivotët janë 0.
Sikurse do të shikojmë, kur matrica e koefiçientëve është në formën e reduktuar row-eçelon, atëherëzgjidhja e sistemit linear gjendet menjëherë në kolonën e fundit të matricës së augmentuar. Le të shikjomënjë shembull.
Shembull 1.8. Le të jetë [H | v] një matricë në formën row-eçelon sikurse në shembullin 1.7:
[H | v] = 2 3 -1 7
0 1 -3 -50 0 -3 -9
.
Gjej formën e tij të reduktuar row-eçelon.
Zgjidhje: Për të gjetur formën e reduktuar row-eçelon kryejmë veprimet e mëposhtme me rreshtat
[H | v] = 2 3 -1 7
0 1 -3 -50 0 -3 -9
R1→ 12 R1, R3→− 1
3 R3−→
1 32 - 1
272
0 1 -3 -50 0 1 3
R1→R1− 32 R2−→
1 0 4 110 1 -3 -50 0 1 3
R2→3R3+R2−→
1 0 4 110 1 0 40 0 1 3
R1→R1−4R3−→ 1 0 0 -1
0 1 0 40 0 1 3
Kështu që, mund të arrijmë në përfundimin se zgjidhja e këtij sistemi është
x = -1
43
,
sikurse gjetëm dhe më parë.

1.5. FORMA E REDUKTUAR ROW-EÇELON, METODA GAUSS-XHORDAN 33
Vërejtje. Kini parasysh se forma e reduktuar row-eçelon e matricës A, ndryshe nga forma row-eçelon,është e vetme.
Metoda e cila transformon matricën e augmentuar në formën e reduktuar row-eçelon quhet metodae Gauss-Xhordan.
Vërejtje. Edhe pse metoda e Gauss-Xhordan na e jep zgjidhjen në një formë "më të përshtatshme", nukmund të themi se kjo metodë është më e mirë se metoda e Gausit. Për sisteme të mëdha lineare ështëi rëndësishëm numri i llogaritjeve që na duhet te kryejmë. Në qoftë se përdorim metodën e Gauss-Xhordan, na duhet të kryejmë 50% më shumë veprime sesa po të përdorim metodën e Gausit.
Shembull 1.9. Gjej formën e reduktuar row-eçelon të matricës.
[A | b] = 2 1 -2 1
-2 1 1 2-2 -1 2 2
Trego të gjitha veprimet e kryera me rreshtat. Cilat janë zgjidhjet e sistemit korespondues Ax = b?
Zgjidhje: Forma e reduktuar row-eçelon është
[H | v] = 1 0 − 3
4 00 1 − 1
2 00 0 0 1
Kështu që sistemi nuk ka zgjidhje.
Shembull 1.10. Gjej vlerat e b-së të tilla që sistemi i mëposhtën të ketë një zgjidhje, një numër të pafundëmzgjidhjesh ose asnjë zgjidhje
x1 +2x2 −x3 = b
x1 +x2 +2x3 = 1
2x1 −x2 +x3 = 2
Zgjidhje: Matrica e augmentuar është
[A | b] = 1 2 -1 b
1 1 2 12 -1 1 2
dhe forma e reduktuar row-eçelon është:
[H | v] =
1 0 0 b+3
4
0 1 0 b−14
0 0 1 b−14
Sistemi ka vetëm një zgjidhje për çdo vlerë të b-së.
Të gjithë sistemet linear të ekuacioneve që kemi paë deri tani kanë po aq ekuacione sa edhe ndryshorë.Të gjithë këta sisteme kanë zgjidhje dhe kjo zgjidhje është e vetme. Në përfundim të këtij leksioni, le tëshohim disa raste të tjera që mund të ndodhin.

34 T. Shaska
Shembull 1.11. Për sistemet lineare nuk është e thënë se numri i ekuacioneve duhet të jetë i njëjtë menumrin e ndryshorëve. Sistemi
x + 3y = 12x + y =−32x + 2y =−2
ka më shumë ekuacione se sa ndryshorë. Metoda e Gausit na ndihmon edhe në këtë rast, meqë
−2ρ1+ρ2−→−2ρ1+ρ3
x + 3y = 1
−5y =−5−4y =−4
kjo tregon se një nga ekuacionet është i tepërt. Forma row-eçelon
−(4/5)ρ2+ρ3−→
x + 3y = 1−5y =−5
0 = 0
na jep y = 1 dhe x =−2. Rezultati ‘0 = 0’ rrjedh nga prania e një ekuacioni të tepërt.
1.5.1 Disa njohuri për sistemet homogjene
Një sistem linear quhet homogjen në qoftë se është në formën
Ax = 0.
Eshtë e qartë se zgjidhje e një sistemi të tillë është x = 0 dhe quhet zgjidhja triviale. Matrica e augmentuarpër sisteme të tilla është [A | 0] dhe forma row-eçelon do të jetë [H | 0]. Sistemi ka zgjidhje jotriviale nëqoftë se një nga rreshtat e H-së nuk ka pivot. Do të shikojmë në Kapitullin 3 se kjo është ekuivalente mefaktin që determinanti i matricës A të jetë jozero.
Një arsye tjetër që sistemet linear mund të ndryshojnë nga shembujt e përmendur më parë është sedisa sisteme linear nuk kanë një zgjidhje të vetme. Kjo mund të ndodh në dy mënyra.
E para është se sistemi mund të mos ketë asnjë zgjidhje.
Shembull 1.12. Krahasoni sistemin e shembullit të fundit me këtë sistem:x + 3y = 1
2x + y =−32x + 2y = 0
−2ρ1+ρ2−→−2ρ1+ρ3
x + 3y = 1
−5y =−5−4y =−2
Ky sistem nuk ka zgjidhje pasi asnjë çift numrash nuk i kënaq të gjithë ekuacionet njëkohësisht. Formaeçelon e tregon qartë këtë mungesë zgjidhjeje.
−(4/5)ρ2+ρ3−→
x + 3y = 1−5y =−5
0 = 2
Bashkësia e zgjidhjes është bosh.

1.5. FORMA E REDUKTUAR ROW-EÇELON, METODA GAUSS-XHORDAN 35
Shembull 1.13. Sistemi i mësipërm ka më shumë ekuacione se ndryshor (të panjohura), por nuk është kjoarsyeja që sistemi nuk ka zgjidhje. — 1.11 ka më shumë ekuacione se ndryshor, por përsëri nuk ka zgjidhje.Nuk është e thënë se një sistem nuk ka zgjidhje atëherë kur numri i ekuacioneve të tij është më i madh senumri i ndryshorëve. Në shembulln e mëposhtëm shqyrtohet një sistem linear që ka po aq ekuacione saedhe ndryshorë, por gjithësesi nuk ka asnjë zgjidhje.{
x + 2y = 82x + 4y = 8
−2ρ1+ρ2−→{
x + 2y = 80 =−8
Rasti tjetër është kur sistemi ka një numër të pafundëm zgjidhjesh.
Shembull 1.14. Në këtë sistem {x + y = 4
2x + 2y = 8
çdo çift numrash që kënaq ekuacionin e parë, automatikisht kënaq edhe të dytin. Bashkësia e zgjidhjeve{(x, y) e tillë që x + y = 4} është e pafundme. Disa elementë të saj janë (0,4), (−1,5) dhe (2.5,1.5). Rezultatiqë përftohet nga zbatimi i metodës së Gausit në këtë rast është ndryshe nga ai i shembullit të mëparshëmsepse ne kemi një pafundësi zgjidhjesh.
−2ρ1+ρ2−→{
x + y = 40 = 0
Mos u ngatërroni nga prezenca e ekuacionit 0 = 0. Ai nuk është treguesi që një sistem të ketë njënumër të pafundëm zgjidhjesh.
Shembull 1.15. Mungesa e ‘0 = 0 nuk e ndalon sistemin të ketë disa zgjidhje të ndryshme. Ky sistem, idhënë në formën row- eçelon {
x + y + z = 0y + z = 0
nuk përmabn identitetin ‘0 = 0, megjithatë ka një numër të pafundëm zgjidhjesh. (Për ilustrim, secila prejkëtyre tresheve është një zgjidhje: (0,1,−1), (0,1/2,−1/2), (0,0,0), dhe (0,−π,π).)
Prania e identitetit ‘0 = 0 nuk do të thotë se sistemi duhet të ketë disa zgjidhje (një numr të pafundëmzgjidhjesh). Ky fakt tregohet në 1.11. Pra ky sistem, i cili nuk ka shumë zgjidhje — , faktikisht ai nuk kaasnjë zgjidhje — pavarësisht se kur ndodhet në formën row-çelon form ka një rresht ’0 = 0’.
2x − 2z = 6y + z = 1
2x + y − z = 73y + 3z = 0
−ρ1+ρ3−→
2x − 2z = 6
y + z = 1y + z = 1
3y + 3z = 0
−ρ2+ρ3−→−3ρ2+ρ4
2x − 2z = 6
y + z = 10 = 00 =−3
E mbyllim këtë seksion duke përmbledhur se çfarë kemi për metodën e Gausit.Metoda e Gausit përdor tre veprimet me radhët për të zgjidhur një sistem linear me anë të zvendësimit
nga fundi. Nëse në ndonjë kalim shfaqet ndonjë kontradiksion, atëherë ndërpresim zgjidhjen duke po-huar se sistemi nuk ka asnjë zgjidhje. Nëse në formën row-eçelon çdo rresht ka pivot, atëherë sistemi kanjë zgjidhje të vetme, të cilën e gjejmë duke zvendësuar nga fundi. Në fund, nëse në formën row-eçelonnuk kemi ndonjë kontradiksion, por edhe aman nuk kemi edhe një zgjidhje të vetme (të paktën një ngarreshtat nuk ka asnjë pivot), atëherë sistemi ka një numër të pafundëm zgjidhjesh.

36 T. Shaska
1.5.2 Të përshkruajmë bashkësinë e zgjidhjeve
Për një sistem linear që ka një zgjidhje të vetme, bashkësia e zgjidhjes së tij ka vetëm një element.Bashkësia e zgjidhjes së një sistemi linear që nuk ka zgjidhje është boshe. Në këto raste bashkësia ezgjidhjes përshkruhet lehtë. Bashkësitë e zgjidhjes janë të vështira për tu shpjehuar kur ato përbëhennga shumë elementë.
Shembull 1.16. Ky sistem ka disa zgjidhje sepse në formën row-eçelon2x + z = 3
x − y − z = 13x − y = 4
−(1/2)ρ1+ρ2−→−(3/2)ρ1+ρ3
2x + z = 3
−y − (3/2)z =−1/2−y − (3/2)z =−1/2
−ρ2+ρ3−→
2x + z = 3−y − (3/2)z =−1/2
0 = 0
jo çdo rresht ka pivot. Metoda e Gausit tregon se një treshe kënaq sistemin e parë në qoftë se ajo kënaqsistemin e tretë. Kështu që bashkësia e zgjidhjes
{(x, y, z) e tillë që 2x + z = 3 dhe x − y − z = 1 dhe 3x − y = 4}
mund të shkruhet gjithashtu edhe si
{(x, y, z) e tillë që 2x + z = 3 dhe −y −3z/2 =−1/2}.
Por edhe përshkrimi i dytë nuk është shumë i leverdisshëm. Ai përmban dy ekuacione që ende pëfshin disalidhje jo të thjesha ndërmjet ndryshorëve.
Për të përftuar një bashkësi zgjidhjeje, e cila nuk përmban më këto lidhje të ndrërlikuara ndërmjetndryshorëve, ne shprehim një variabël në varësi të të tjeëve në njërin prej ekuacioneve të bashkësisë dhe ezvendësojmë tek ekuacioni tjetër, duke marrë këtu një ekuacion për ndryshorët x, y, z. Kështu, ekuacionii dytë na jep y = (1/2)− (3/2)z dhe duke zvenësuar y-in në ekuacionin e parë marrim: x = (3/2)− (1/2)z.Kështu që bashkësia e zgjdhjes mund të shkruhet si
{(x, y, z) = ((3/2)− (1/2)z, (1/2)− (3/2)z, z) e tillë që z ∈ℜ}
.
barabartë me 1/2 dhe të dytin −5/2.
Avantazhi i këtij përshkrimi është se nuk ka kufizim për z,ndryshorin e vetëm që ndodhet në bashkësinëe zgjidhjes, ai mund të çdo numër real.
Përkufizim 1.10. Termat jo-udhëheqës në të një sistemi linear ekuacionesh në forën row-eçelon janëtermat e lirë.
Në formën row-eçelon të sistemit të mësipërm, x dhe y janë termat udhëheqës (termat kryesor),ndërsa z është e lirë.

1.5. FORMA E REDUKTUAR ROW-EÇELON, METODA GAUSS-XHORDAN 37
Shembull 1.17. Një sistem linear mund të ketë në fund më shumë se një ndryshorë (termë) të lirë. Kysistem në formën reduktuar ka si terma kryesor x-in dhe y-in, ndërsa si terma të lirë z-in dhe w.
x + y + z − w = 1y − z + w =−1
3x + 6z − 6w = 6−y + z − w = 1
−3ρ1+ρ3−→
x + y + z − w = 1
y − z + w =−1−3y + 3z − 3w = 3−y + z − w = 1
3ρ2+ρ3−→ρ2+ρ4
x + y + z − w = 1
y − z + w =−10 = 00 = 0
Për të marrë një bashkësi zgjidhjeje, ne nisemi nga fundi. Fillimisht, shprehim y në varësi të termave të lirëz dhe w, pra y =−1+z−w. Pastaj në ekuacioni e parë zvendësojmë y-in e gjetur x+(−1+z−w)+z−w = 1dhe e zgjidhim atë në varësi të x-it, prej nga x = 2−2z +2w. Kështu që, bashkësia e zgjidhjeve është
{2−2z +2w,−1+ z −w, z, w) e tillë që z, w ∈R}
Ne preferojmë më shumë këtë përshkrim (këtë mënyrë të dhëni) për bashkësinë e zgjidhjes sepse ndryshorëte vetëm që ndodhen aty z dhe w janë të pakufizuar. Kjo e bën më të thjeshtë zgjedhjen e katërsheve si zgjid-hje të sistemit. Për më tepër, po të marrim z = 1 dhe w = 2, atëherë zgjidhja e sistemit do të jetë (4,−2,1,2).Ndërsa (3,−2,1,2) nuk është një zgjidhje e sistemit sepse komponenti i parë i një zgjidhjeje duhet të jetë 2minus dyfishin e të tretit plus dyfishin e të katërtit.
Shembull 1.18. After this reduction2x − 2y = 0
z + 3w = 23x − 3y = 0
x − y + 2z + 6w = 4
−(3/2)ρ1+ρ3−→−(1/2)ρ1+ρ4
2x − 2y = 0
z + 3w = 20 = 0
2z + 6w = 4
−2ρ2+ρ4−→
2x − 2y = 0
z + 3w = 20 = 00 = 0
x dhe z janë termat kryesor, ndërsa y dhe w janë terma të lirë. Bashkësia e zgjidhjeve të sistemit është{(y, y,2−3w, w) e tillë që y, w ∈R}. Kështu, (1,1,2,0) është një zgjidhje e sistemit, e cila përftohet dukemarrë y = 1 dhe w = 0. Katërshja e radhitur (1,0,5,4) nuk është një zgjidhje e sistemit sepse koordinata eparë nuk është e barabartë me të dytën.
Termat e lirë që përdoren për të përshkruar një familje zgjidhjesh të një sistemi linear do ti quajmëparametër dhe themi se bashkësia e mësipërme parametrizohet nga y dhe w . (Fjalët ‘parametër’ dhe’term i lirë’ nuk kanë të njëjtin kuptim. Në shembullin e mësipërm, y dhe w janë terma të lirë sepse nëformën row-eçelon të sistemit, ato nuk udhëheqin në ndonjë rresht. Ata janë parametra sepse përdorennë përshkrimin e bashkësisë së zgjidhjes. Ne mund të parametrizonim me y dhe z duke e rishkruarekuacionin e dytë si w = 2/3− (1/3)z. Në këtë rast, termat e lirë janë përsëri y dhe w , por parametratjanë y dhe z. Vini re se ne nuk mund të paramentrizojmë me x dhe y , fakt ky që tregon se ndonjëherëka kufizim në zgjedhjen e parametrave. Termat ’parametër’ dhe ’term i lirë’ kanë lidhje me njëri-tjetrinsepse bashksia e zgjidhjeve të një sistemi parametrizohet gjithmon nga termat e lirë.

38 T. Shaska
Shembull 1.19. Ky është shembulli i një tjetër sistemi që ka një pafundësi zgjidhjesh.x + 2y = 1
2x + z = 23x + 2y + z − w = 4
−2ρ1+ρ2−→−3ρ1+ρ3
x + 2y = 1
−4y + z = 0−4y + z − w = 1
−ρ2+ρ3−→
x + 2y = 1−4y + z = 0
−w = 1
Ndryshorët udhëheqës (kryesor) janë x, y dhe w. Ndërsa ndryshori z është i lirë. (Vini re se edhe pse sistemika një pafundësi zgjidhjesh, vlera e një ndryshori është e fiksuar — w =−1.) Shkruajmë w në varësu të z-itsi w =−1+0z. Prej nga y = (1/4)z. Për të shprehur x në varësi të z, zvendësojmë y-in në ekuacionin e parëdhe marrim x = 1−(1/2)z. Kështu që bashkësia e zgjidhjeve është {(1− (1/2)z, (1/4)z, z,−1) e tillë që z ∈R}.
Përkufizim 1.11. Një m×n matricë është një koleksion numrash, të vendosur në m rreshta dhe n kol-lona. Çdo numër i matricës quhet element i saj
Zakonisht matricat shënohen me shkronja të mëdha, për shembull. A. Çdo elementë shënohet me shkro-nja të vogla, për shembull, ai , j është numri që ndodhet në rreshtin i dhe në kolonën j . Për më tepër,matrica
A =(1 2.2 53 4 −7
)ka dy rreshta dhe tre kolona, pra është një matricë 2×3. (Lexohet “dy me tre”, pra numri i rreshtavethuhet gjithmon i pari.) Elementi i parë në rreshtin e dytë dhe në kolonën e parë është a2,1 = 3. Vini re seka rëndësi vendosja e treguesëve: a1,2 6= a2,1 pasi a1,2 = 2.2.
Matricat do të na shoqërojnë kudo në këtë libër. Bashkësinë e matricave n×m do ta shënojmë Mn×m .
Shembull 1.20. Sistemit linear të mëposhtëmx1 + 2x2 = 4
x2 − x3 = 0x1 + 2x3 = 4
i shoqërojmë matricën. 1 2 0 40 1 −1 01 0 2 4
Vija vertikale duhet t’i kujtojë lexuesit ndarjen e koeficientve të sistemit nga e majta me konstantet nga edjathta. Kur një vijë e tillë përdoret për ta ndarë matricën në dy pjesë, ne e quajmë matricën që përftohetmatricë të augmentuar. Me këtë shënim, metoda e Gausit mund të shkruhet si:1 2 0 4
0 1 −1 01 0 2 4
−ρ1+ρ3−→1 2 0 4
0 1 −1 00 −2 2 0
2ρ2+ρ3−→1 2 0 4
0 1 −1 00 0 0 0
Rreshti i dytë na jep y −z = 0, ndërsa në rrestin e parë kemi x+2y = 4, prej nga bashkësia e zgjidhjeve është{(4−2z, z, z) e tillë që z ∈R}.

1.5. FORMA E REDUKTUAR ROW-EÇELON, METODA GAUSS-XHORDAN 39
Ne do ta përdorim gjithashtu këtë mënyrë të shkruari me rreshta për të qartësuar përshkrimin ebashkësisë së zgjidhjeve të sistemit linear. Përshkrimi i tipit {(2−2z +2w,−1+ z −w, z, w) e tillë që z, w ∈R}në 1.17 lexohet me vështirësi. Rishkruajmë bashkësinë duke grupuar gjithë konstantet bashkë, të gjithëkoeficientët para z-it bashkë dhe gjithë koeficientët para w bashkë, duke i shkruar si shumë e maticavekolonë, si mëposhtë:
{
2−100
+
−2110
· z +
2−101
·w e tillë që z, w ∈R}
Për më tepër rreshti i parë tregon se x = 2−2z +2w . Në seksionin e ardhshëm jepet një interpretimgjeometrik, i cili do të na ndihmoj ne për të ndërtuar figurat e bashkësive të zgjidhjeve të sistemeve linear.
Përkufizim 1.12. Një vektor (ose një vektor shtyllë) është një matricë që ka një shtyllë të vetme. Njëmatricë që ka një rresht të vetëm quhet vektor rresht. Elementët e vektorëve quhen komponentë të tijose koordinata.
Vektorët bëjnë një përjashtim nga mënyra e të shktuarit të matricave me shkronja të mdha. Një vektordo e shkruajmë me gërma të vogla latine ose greke, të shoqëruar me një shigjetë sipër: ~a,~b, . . . ose~α,~β,. . . (gjithashtu përdoren edhe gërmat e vogla, të theksuara me ngjyrë të zezë: a ose α). Më poshtë jepetshembulli i një vektori shtyllë që e ka komponentin (koordinatën) e tretë 7 .
~v =1
37
Përkufizim 1.13. Ekuacioni linear a1x1+a2x2+ ·· · +an xn = d me ndryshorë x1, . . . , xn kënaqet (ka zgjid-hje) nga
~s =
s1...
sn
në qoftë se a1s1 +a2s2 + ·· · +an sn = d . Një vektor kënaq një sistem linear nëse ai kënaq çdo ekuacion tësistemit.
Mënyra e re e përshkrimit të bashkësive të zgidhjeve konsiston në mbledhje vektorësh dhe shumëz-imin e tyre me numra realë. Kështu që duhet ti përkufizojmë këto veprime.
Përkufizim 1.14. Shuma e dy vetorëve ~u dhe ~v jepet:
~u +~v =
u1...
un
+
v1...
vn
=
u1 + v1...
un + vn
Në përgjithësi, dy matrica që kanë numër të njëjtë rreshtash dhe kollonash mblidhen në të njëjtën mënyrë.Pra mblidhen elementet në pozicionet respektive të tyre.

40 T. Shaska
Përkufizim 1.15. Shumëzimi me një skalar realë r i një vektori ~v jepet:
r ·~v = r ·
v1...
vn
=
r v1...
r vn
Kështu, shumëzimi i një matrice me një skalar realë bëhet duke shumëzuar çdo element të saj me po tënjëjtin skalar.
Shumëzimi me skalar mund të shkruhet si: r ·~v ose ~v · r ose thjeshtë: r~v . (Shumëzimi me skalar nukduhet ngatruar me ’produktin skalar’ sepse këto emra iu përkasin dy veprimeve të ndryshme.)
Shembull 1.21. 231
+ 3−14
=2+3
3−11+4
=5
25
7 ·
14−1−3
=
7
28−7−21
Sipas shënimeve të mësipëme, ne do të zgjidhim sisteme ekuacionesh linear gjatë gjithë pjesës tjetër
të këtij libri.
Shembull 1.22. Sistemi 2x + y − w = 4
y + w + u = 4x − z + 2w = 0
reduktohet në këtë mënyrë:2 1 0 −1 0 40 1 0 1 1 41 0 −1 2 0 0
−(1/2)ρ1+ρ3−→2 1 0 −1 0 4
0 1 0 1 1 40 −1/2 −1 5/2 0 −2
(1/2)ρ2+ρ3−→
2 1 0 −1 0 40 1 0 1 1 40 0 −1 3 1/2 0
Bashkësia e zgjidhjeve është {(w + (1/2)u,4−w −u,3w + (1/2)u, w,u) e tillë që w,u ∈ℜ}, të cilën e shkru-ajmë sipas vektorëve në trajtën:
{
xyzwu
=
04000
+
1−1310
w +
1/2−11/2
01
u e tillë që w,u ∈ℜ}
Vini re se si komponetët e vektorëve përcaktojnë koeficientët e secilit parametër. Për më tepër, rreshti i tretëi bashkësisë së zgjidhjeve, i shkruar sipas vektorëve tregon se nëse u mbahet e fiksuar, atëherë z rritet metrefishin e vlerës së w.
Kjo formë tregon hapur se sistemi ka një numër të pafundëm zgjidhjesh. Për shembull, fiksojmë u tëbarabartë me 0, ndërsa w le të marrë vlera reale dhe shqyrtojmë komponentin e parë x. Ne marrim njëpafundësi vlerash për të, fakt ky që do të thotë se sistemi ka një pafundësi zgjidhjesh.

1.5. FORMA E REDUKTUAR ROW-EÇELON, METODA GAUSS-XHORDAN 41
Një tjetër gjë që duket qartë është se nëse i bëjmë njëkohësisht w dhe u zero, atëherë kemixyzwu
=
04000
e cila është një zgjidhje e veçantë e sistemit linear.
Shembull 1.23. Në të njëjtën mënyrë, sistemix − y + z = 1
3x + z = 35x − 2y + 3z = 5
reduktohet si: 1 −1 1 13 0 1 35 −2 3 5
−3ρ1+ρ2−→−5ρ1+ρ3
1 −1 1 10 3 −2 00 3 −2 0
−ρ2+ρ3−→1 −1 1 1
0 3 −2 00 0 0 0
i cili ka si bashkësi zgjidhjeje një parametër.
{
100
+−1/3
2/31
z e tillë që z ∈ℜ}
Para se të kalojmë tek ushtrimet, le të përmendim edhe një herë se çfarë na ka ngelur ende pa shyrtuarnë këtë seksion.
Dy seksionet e para dhanë mekanizmin e metodës së Gausit. Përveç rezultatit të teormës 1.4 — pa tëcilën nuk ka kuptim shpjegimi i kësaj metode, ne nuk kemi marrë në konsideratë disa pyetje interesanteqë mund të lindin.
Për shembull, a mund ta përshkruajmë bashkësitë e zgjidhjeve si mësipër? Në bashkësitë e zgjidhjeveqë ne kemi pëshkruar me anë të parametrave të pakufizuar dukej lehtë prania e një numri të pafundëmzgjidhjesh, kështu që përgjigja e kësaj pyetjeje duhet të na thotë diçka mbi përmasat e tyre. Një përgjigjee kësaj pyetjeje gjithashtu mund të na ndihmoj për të vizatuar bashkësitë zgjidhjeve në ℜ2 ose në ℜ3, etj.
Shumë pyetje lindin nga mënyra e përdorimit të metodës së Gausit në zgjidhjen e sistemeve linear.Teorema 1.4 thotë se marrim të njëjtën bashkësi zgjidhjeje edhe nëse zbatojmë metodën e Gausit në dymënyra të ndryshme. Por në këtë rast a marrim të njëjtin numër variablash në të dy veprimet? Pra, seciliprej bashkësive të zgjidhjes a ka të njëjtin numër parametrash? A duhet të jenë ata të njëjtët ndryshor(për shembull, a është e mundur të zgjidhësh një problem, në cilën një herë ke y dhe w te lirë dhe njëherë të kesh y dhe z të tillë?)
Përgjigjen e të gjitha këtyre pyetjeve do ta japim në vazhdim të këtij kapitulli dhe përgjigja për secilënështë ’po’.
Ushtrime:

42 T. Shaska
42. Gjej formën e reduktuar row-eçelon të A-së
A = 1 2 3
2 0 13 2 2
dhe zgjidh sistemin linear Ax = 0.
43. Gjej formën e reduktuar row-eçelon të A-së
A = 0 1 -3 -5
0 3 0 14 5 -2 10
dhe zgjidh sistemin linear Ax = 0.
44. Gjej formën e reduktuar row-eçelon të A
A =
0 0 0 01 1 -3 -31 3 0 02 5 -2 1
dhe zgjidh sistemin linear Ax = 0.
45. Zgjidh sistemin e mëposhtëm me metodën e Gauss-Xhordanx1 +2x2 −x3 = 1
x1 +x2 +2x3 = 3
2x1 −x2 +x3 =−2
46. Zgjidh sistemin e mëposhtëm me metodën e Gausit5x1 +3x2 −x3 =−2
2x1 +2x2 +2x3 = 3
−x1 −x2 +x3 = 6
47. Zgjidh sistemin e mëposhtëm me metodën e Gauss-Xhordan11x1 +12x2 −3x3 = 2
−x1 +3x2 +2x3 = 3
2x1 +3x2 +x3 =−2
48. Vërteto se forma e reduktuar row-eçelon e një matrice është e vetme.

1.6. MATRICAT E ANASJELLTA 43
49. Le të jetë Ax = 0 një sistem homogjen i cili nuk ka zgjidhje jotriviale. Cila është forma e reduktuarrow-eçelon e A-së ?
50. Gjej a,b, dhe c të tilla që parabolay = ax2 +bx + c
të kalojë nga pikat (1,2),(-1,1), dhe (2,3).
51. Gjej a,b,c dhe d të tilla që polinomi i gradës së katërt
y = ax4 +bx3 + cx2 +d
të kalojë nga pikat (3,2), (-1,6), (-2,1), dhe (0,0).
Ushtrime programimi:
2. Shkruaj një program kompjuteri, i cili të zgjidh një sistem linear ekuacionesh me anë të metodës sëGausit dhe metodës Gauss-Xhordan. Testo programin për sisteme shumë të mëdha dhe krahaso kohën përtë dy metodat.
1.6 Matricat e anasjellta
Në këtë seksion do të studiojmë konceptin e rëndësishëm të matricave të anasjellta.
Përkufizim 1.16. Le të jetë A = [ai , j ] një matricë katrore n×n. A quhet e invertueshme në qoftë se ështënjë matricë n ×n A−1 e tillë që
AA−1 = A−1A = In .
A−1 quhet e anasjellta e A-së dhe A quhet e invertueshme. Në qoftë se A nuk është e invertueshmeatëherë quhet singulare.
Teorema 1.6 (Uniciteti i të anasjelltës). Le të jetë A një matricë e invertueshme . Atëherë e anasjellta e A-sëështë e vetme.
Vërtetim: Supozojmë se A ka dy matrica të anasjellta C dhe D. Atëherë,
AC = I = AD dhe CA = I = DA
Si rrjedhim kemi
D(AC) = DI = D
D(AC) = (DA)C = IC = C(1.7)
Kështu që C = D.Gjithashtu kemi edhe përfundimin e mëposhtëm:
Lema 1.6. Le të jenë A, B matrica të invertueshme . Atëherë AB është e invertueshme dhe
(AB)−1 = B−1A−1.

44 T. Shaska
Vërtetim: Ushtrim për lexuesin.
Përkufizim 1.17. Çdo matricë e cila përfitohet nga matrica identitet In duke bërë një veprim me rreshtatquhet matricë elementare .
Teorema 1.7. Le të jetë A një matricë m×n dhe E një matricë elementare m×m. Atëherë E A vepron me tënjëjtat veprime me rreshtat në A si dhe veprimet e kryera në In për të përfituar E.
Vërtetim: Le të jetë E një matricë elementare e përfituar si
ImRi←→R j−→ E.
Atëherë matrica e re është Ri (E) = (0, . . . ,0,1,0, . . .0), ku 1 është në pozicionin e j-të. Kështu që elementëte Ri (E A) janë
Ri (E) ·Cr (A), for r = 1, . . .n
dhe Ri (E A) = R j (A). Në të njëjtën mënyrë, R j (E A) = Ri (A).Rasti kur E përfitohet nga veprimet e tjera me rradhët bëhet në të njëjtën mënyrë dhe është lënë si
ushtrim për lexuesin.
1.6.1 Llogaritja e matricave të anasjellta duke përdorur formën row-eçelon
Le të jetë A një matricë e dhënë. Duam të gjejmë të anasjelltën e saj A−1 në qoftë se ekziston. Kon-siderojmë në fillim matricat elementare.
Le të jetë E një matricë elementare e përfituar nga ndërrimi i vendeve të dy rreshtave të matricës I.Në qoftë se u ndërojmë vendet të njëjtave rreshta në E, do të marrim përsëri I. Kështu që EE = I dhei anasjellti i E-së është vet matrica E. Në qoftë se E përfitohet nga shumëzimi i një prej rreshtave menjë skalar, atëherë pjestojmë të njëjtin rresht me të njëjtin skalar për të marrë përsëri I. Në qoftë se Epërfitohet nga Ri → Ri + r R j atëherë duke bërë veprimet Ri → Ri − r R j do të marrim përsëri I-në. Sirrjedhim, kemi pohimin e mëposhtëm:
Lema 1.7. Matricat elementare janë të invertueshme
Vërtetim: Le të jetë E1 një matricë elemetare. Atëherë E1 përfitohet duke kryer disa veprime me rresh-tat në matricën identike I. Kryejmë të njëjtat veprime në E1 për të përfituar I. Kështu që E1 ka një tëanasjelltë.
Shembull 1.24. Le të jetë E e dhënë si më poshtë
E =
1 0 0 00 0 0 10 0 1 00 1 0 0
Gjej të anasjelltën e saj.
Zgjidhje: E përfitohet duke i ndëruar vendet rreshtave R2 ←→ R4 të matricës identitet. Atëherë E është njëmatricë elementare dhe si rrjedhim e invertueshme. E anasjellta e saj është E meqënëse E2 = I.
Lema 1.8. Le të jenë A dhe B matrica katrore n×n. Atëherë, AB = In atëherë dhe vetëm atëherë kur BA = In .

1.6. MATRICAT E ANASJELLTA 45
Vërtetim: Eshtë e mjaftueshme të tregojmë se në qoftë se AB = In , atëherë BA = In , e anasjellta vërteto-het nga simetria e A-së dhe B-së. Kështu që, supozojmë se AB = In . Le të jetë b një vektor çfarëdo nëRn . Atëherë ABb = b. Pra, sistemi Ax = b ka gjithmonë një zgjidhje (x = Bb). Nga Teorema 1.5 forma ereduktuar row-eçelon e A-së është In . Kështu që, ekzistojnë E1, . . . ,Ek të tilla që
Ek · · ·E1A = In (1.8)
Duke shumëzuar të dyja anët nga e djathta me B, kemi
Ek · · ·E1 (AB) = B.
Por AB = In , kështu që Ek · · ·E1 = B. Si rrjedhim, nga ekuacioni (1.8) kemi BA = In .Tani, kthehemi përsëri tek çështja kryesore e këtij kreu, llogaritja e të anasjelltës së një matrice. Në
përgjithësi hapat e kryera janë si më poshtë. Le të jetë A = [ai , j ] një matricë e dhënë. Për të gjetur A−1
kemi algoritmin e mëposhtëm:
Algorithm 2. Input: Një matricë katrore A.Output: Përcakton nëse A−1 ekziston, në qoftë se po gjen A−1.
1) Formo matricën e augmentuar [A | I]2) Përdor metodën e Gauss-Xhordan për të reduktuar [A | I] në [I | C]. Në qoftë se kjo është e mundur
atëherë C = A−1, në të kundërt A−1 nuk ekziston.
Shembull 1.25. Gjej të anasjelltën e matricës së mëposhtme
A =
-1 1 0 20 2 1 00 1 -2 10 -1 -1 0
Zgjidhje: Formo matricën [A | I]. Atëherë forma e saj e reduktuar row-eçelon është:
[I | C] =
1 0 0 0 -1 -5 2 -90 1 0 0 0 1 0 10 0 1 0 0 -1 0 -20 0 0 1 0 -3 1 -5
Kështu që,
A−1 = C =
-1 -5 2 -90 1 0 10 -1 0 -20 -3 1 -5
Shembull 1.26. Le të jetë A një matricë e dhënë
A =
1 0 0 -11 1 1 0-1 1 1 00 0 -1 -1

46 T. Shaska
Gjej të anasjelltën e saj.
Zgjidhje: Krijo [A | I] si më poshtë
[A | I] =
1 0 0 -1 1 0 0 01 1 1 0 0 1 0 0-1 1 1 0 0 0 1 00 0 -1 -1 0 0 0 1
Forma e saj e reduktuar row-eçelon është
[I | A−1] =
1 0 0 0 0 1
2 - 12 0
0 1 0 0 -1 1 0 10 0 1 0 1 - 1
212 -1
0 0 0 1 -1 12 - 1
2 0
Vërejtje. Më sipër treguam se si të gjejmë të anasjelltën e një matrice. Gjithësesi e anasjellta e një matricenë disa raste mund të mos ekzistojë. Në kapitullin në vazhdim do studiojmë disa kushte të mjaftueshmedhe të nevojshme që e anasjellta i një matrice të ekzistojë.
Ushtrime:
52. a) Le të jetë A një matricë katrore e tillë që A2 = 0. Gjej të anasjelltin e I−A.b) Le të jetë A një matricë katrore e tillë që A2 +2A+ I = 0. Gjej të anasjelltën e A.c) Le të jetë A një matricë katrore e tillë që A3 −A+ I = 0. Gjej të anasjelltën e A.d) Le të jetë A një matricë katrore e tillë që An = 0. Gjej të anasjelltën e I−A.
53. Gjej të anasjelltën e
A =[
1 a0 1
]
A ka A të anasjelltë për çdo vlerë të a-së?
54. Për cilat vlera të a,b,c,d e anasjellta e
A =[
a bc d
]
ekziston? Gjej të anasjelltën për këto vlera të a,b,c,d.
55. Zgjidh sistemin linearAx = b
në qoftë se A është e invertueshme .

1.6. MATRICAT E ANASJELLTA 47
56. Vërteto se në qoftë se B është e invertueshme, atëherë tr (A) = tr (BAB−1).
57. Le të jetë
A = 1 2 -1
0 3 12 0 1
Nëse është e mundur, gjej një maticë B të tillë që AB = 2I.
58. Gjej të anasjelltën e matricës së mëposhtme
A =
5 2 0 23 2 1 03 1 -2 42 4 -1 2
.
59. Le të jenë
A = 1 2 3
-2 1 23 2 1
, B = 3 0 1
2 0 20 2 1
,
dy matrica të dhëna. Gjej: tr (A), t r (B), At , AB, Bt At , t r (BAB−1).
60. Vërteto se në qoftë se A është e invertueshme atëhere edhe At është e invertueshme.
61. Le të jetë r një numër i plotë pozitiv dhe A një matricë e invertueshme. A është Ar domozdoshmërishte invertueshme ? Justifiko përgjigjen e dhënë.
Ushtrime përsëritje
62. Gjej formën e reduktuar row-eçelon të matricës. Trego të gjitha veprimet me rradhët. 4 2 3 3-2 1 1 23 -1 2 1
63. Gjej këndin ndërmjet vektorëve u = (1,2,3) dhe v = (5,1,8).
64. Përcakto të gjitha vlerat e b1,b2 të tilla që sistemi i mëposhtëm të mos ketë asnjë zgjidhjex1 +2x2 −x3 = b1
−2x1 −4x2 +2x3 = b2
x1 −x2 +x3 = 2

48 T. Shaska
65. Gjej sipërfaqen e trekëndëshit ndërmjet tre pikave (1,2), (3,4), (5,6).
66. Le të jenë dhënë matricat
A = 3 2 3
-2 1 20 1 1
, B = 2 -2 1
2 0 20 2 2
,
Gjej: tr (A), t r (B), At , AB, Bt At , t r (BAB−1).
67. Vërteto se në qoftë se AB është e invertueshme, atëherë po kështu janë edhe A dhe B.
68. Një matricë katrore quhet matricë trekëndëshe e sipërme në qoftë se të gjithë elementët nën diago-nalen kryesore janë zero. Sa është shuma dhe produkti i matricave matricë trekëndëshe të sipërme? Justi-fiko përgjigjen e dhënë.
69. Një matricë katrore quhet matricë trekëndëshe e poshtme në qoftë se të gjitha elementët mbi diag-onalen kryesore janë zero. Sa është shuma dhe produkti i matricave trekëndëshe të poshtme? Le të jetëV := Matn×n(R) bashkësia e të gjitha matricave n ×n në R, W1 bashkësia e matricave matricë trekëndëshee sipërme të V-së, dhe W2 bashkësia e të gjitha matricave trekëndëshe të poshtme të V-së. Çfarë është prerjae W1 ∩W2?
70. Le të jetë A një matricë 3 me 2. Vërteto se ekziston një vektor b i tillë që sistemi linear
Ax = b
është i pazgjidhshëm.
71. Le të jetë A një matricë m×n me m > n. Vërteto se ekziston një b, e tillë që sistemi linear Ax = b është ipazgjidhshëm.
72. Le të jetë A një matricë m ×n dhe B një matricë n ×m, ku m > n. Përdor rezultatin e mësipërm për tëvërtetuar se forma row-eçelon e matricës AB ka të paktën një rresht me të gjitha elementët zero.
73. Gjej të gjitha matricat B të tilla që
i)
[0 10 2
]B =
[0 00 0
]ii)
[0 10 2
]B =
[0 0 10 0 2
]

1.6. MATRICAT E ANASJELLTA 49
74. Gjej të gjitha matricat të cilat janë ndërrimtare me[0 10 2
]75. Vërteto se në qoftë se AB = BA atëherë At Bt = Bt At .
76. Le të jetë V bashkësia e të gjitha matricave m ×n me elementë në R. Vërteto se matricat skalare janëndërrimtare me të gjitha matricat nga V. A ka matrica të tjera, të cilat janë ndërrimtare me të gjitha ma-tricat e V-së?
77. Le të jenë a, b, c, d numra realë jo të gjithë zero. Vërteto se sistemi i mëposhtëm ka vetëm një zgjidhjeax1 +bx2 + cx3 +d x4 = 0
bx1 −ax2 +d x3 − cx4 = 0
cx1 −d x2 −ax3 +bx4 = 0
d x1 + cx2 −bx3 −ax4 = 0
78. Për çfarë vlere λ ka zgjidhje sistemi i mëposhtëm:2x1 −x2 +x3 +x4 = 1
x1 +2x2 −x3 +4x4 = 2
x1 +7x2 −4x3 +11x4 = λ
79. Sistemi i mëposhtëm ka një zgjidhje të vetme:ay +bx = c
cx +az = b
bz + c y = a.
Vërteto se abc 6= 0. Gjej zgjidhjen e sistemit.
80. Gjej: [1 10 1
]n
,
[1 01 1
]n
,
[1 11 1
]n
81. Le të jetë
A =[
a bc a
],
e tillë që A2 = I. Vërteto se relacioni i mëposhtëm është i vërtetë kur zëvendësojmë x me A:
x2 − (a +d)x + (ad −bc) = 0.

50 T. Shaska
82. Le të jetë A një matricë 3 me 3. A mund të përgjithësoni problemin e mësipërm për këtë rast? Po nërastin kur A është një matricë n ×n?
83. Gjej rendin e matricave të mëposhtme[1 -11 0
],
[1 -10 1
],
[-1 10 1
],
[1 -1
-1 0
]Ushtrime programimi:
3. Shkruaj një program kompjuteri i cili llogarit fuqinë Am të një matrice A (n×n). Ekzekutoni programinpër disa matrica dhe kontrollo nëse programi është eficient.

Kapitulli 2
Hapësirat vektoriale
Në këtë kapitull do përkufizojmë formalisht hapësirat vektoriale. Pasi diskutuam në kapitullin e më-parshëm hapësirat Euklidiane, koncepti i hapësirës vektoriale në këtë kapitull do të jetë më intuitiv. Gjatëkëtij kapitulli me k do të shënojmë një fushë. Për qëllimin tonë k është një nga bashkësitë që vijojnë Q,R, C. Për më tepër detaje mbi fushat shih në Apendiks.
2.1 Përkufizimi i hapësirave vektoriale
Le të jetë S një bashkësi dhe
f : S ×S → S
(a,b) → f (a,b)(2.1)
një funksion. Një funksion të tillë do ta quajmë veprim binar të përkufizuar në S.
Shembull 2.1. Le të jetë Z një bashkësi numrash të plotë dhe "+"i përkufizuar si
"+" : Z×Z→Z
(a,b) → a +b(2.2)
Atëherë, "+"është një veprim binar i përkufizuar në Z.
Le të jetë V një bashkësi e dhënë dhe ′′+′′ veprim binar i përkufizuar si më poshtë
"+" : V ×V → V
(u,v) → u+v(2.3)
Le të jetë ′′∗′′ një tjetër veprim binar
"∗" : k ×V → V
(r,u) → r ∗u(2.4)
51

52 T. Shaska
Përkufizim 2.1. (V,+,∗) është një hapësirë vektoriale mbi k në qoftë se plotëson vetitë e mëposhtme:
1) (u + v)+w = u + (v +w), ∀u, v, w ∈ V
2) u + v = v +u, ∀u, v ∈ V
3) ∃0 ∈ V, s.t . 0+u = u +0 = u, ∀u ∈ V
4) ∀u ∈ V, ekziston −u ∈ V e tillë që u −u = 0
5) ∀r ∈ k,u, v ∈ V, r ∗ (u + v) = r ∗u + r ∗ v
6) ∀r, s ∈ k,u ∈ V, (r + s)∗u = r ∗u + s ∗u
7) ∀r, s ∈ k,u ∈ V, (r s)∗u = r ∗ (s ∗u)
8) ∃1 ∈ k, s.t .∀u ∈ V, 1∗u = u
Vetitë 1) dhe 2) tregojnë se mbledhja ka vetinë e shoqërimit dhe të ndërrimit. Nga vetia 3) kemi vetinëe identitetit të mbledhjes dhe nga vetia 8) vetinë e identitetit të shumëzimit. Vetia 4) tregon vetinë etë anasjelltit të shumës që zakonisht e quajmë i kundërti. Elementët r, s ∈ k quhen skalarë. Që këtej etutje ne nuk do të përdorim më ′∗′.
Elementët e hapësirës vektoriale quhen vektorë. Që këtej e tutje V/k do quajmë një hapësirë vektori-ale mbi një fushë k. Shpesh mund të përdorim thjesht simbolin V. Në vazhdim do të japim disa shembujklasikë hapësirash vektoriale.
Shembull 2.2. (Hapësirat Euklideane Rn ) Vërteto se Rn është një hapësirë vektoriale me mbledhjen ezakontë të vektorëve dhe shumëzimin skalar. Cili është identiteti i mbledhjes dhe shumëzimit?
Shembull 2.3. (Hapësira e polinomeve me koeficientë në k) Shënojmë me k[x] bashkësinë e polinomeve
f (x) = an xn +an−1xn−1 +·· ·+a1x +a0
ku a0, . . . , an ∈ k. Pëcaktojmë shumën dhe prodhimin skalar të dy polinomeve me
( f + g )(x) := f (x)+ g (x)
(r f )(x) := r f (x)(2.5)
për çdo r ∈ k. Atëherë, k[x] është një hapësirë vektoriale mbi k. k[x] e quajmë gjithashtu edhe unazapolinomiale të polinomeve me një ndryshor. Shiko Kapitullin 4 për më shumë detaje.
Shembull 2.4. (Hapësira e matricave n ×n) Bashkësia e matricave n ×n me elementë nga fusha k, sëbashku me matricën shumë dhe shumëzimin skalar formojnë një hapësirë vektoriale. E shënojmë këtëhapësirë me Matn×n(k).
Shembull 2.5. (Hapësira e funksioneve nga R në R) Le të jetë L (R) bashkësia e të gjithë funksioneve
f :R−→R

2.1. PËRKUFIZIMI I HAPËSIRAVE VEKTORIALE 53
Shënojmë shumën dhe prodhimin skalar të dy funksioneve me
( f + g )(x) := f (x)+ g (x)
(r f )(x) := r f (x)(2.6)
për çdo dy r ∈R. Vërteto se L (R) është një hapësirë vektoriale mbi R.
Përgjithësojmë shembullin e mësipërm si më poshtë:
Shembull 2.6. (Hapësirat e funksioneve) Le të jetë S një bashkësi dhe k një fushë. Një funksion quhetk-vlerë në qoftë se
f : S −→ k
Le të jetë V bashkësia e të gjithë funksioneve k-valued. Shënojmë shumën dhe prodhimin skalar të dyfunksioneve në V si më poshtë
( f + g )(x) := f (x)+ g (x)
(r f )(x) := r f (x)(2.7)
për çdo r ∈ k. Atëherë V është një hapësirë vektoriale mbi k.
Përkufizim 2.2. Një nënbashkësi W ⊂ V quhet nënhapësirë e V-së në qoftë se vetë nënbashkësia Wështë një hapësirë vektoriale.
Shembull 2.7. Le të jetë V =R3. Atëherë çdo v ∈ V është një treshe e renditur
v = (x, y, z).
Le të jetë W bashkësia e vektorëve v ∈ V të tillë që, kordinata e fundit e çdo vektori është 0
W = {v = (x, y,0) | v ∈ V}.
Si rrjedhim W do të jetë bashkësia R2 e cila është gjithashtu një hapësirë vektoriale. Kështu që, W është njënënhapësirë e V-së.
Një bashkësi S e V-së quhet e mbyllur nën mbledhjen në qoftë se për çdo u,v ∈ S kemi (u+v) ∈ S.Quhet e mbyllur nën prodhimin skalar në qoftë se për çdo u ∈ S dhe r ∈ k kemi r u ∈ S.
Lema 2.1. Cdo nënbashkësi W ⊂ V është një hapësirë vektoriale atëherë dhe vetëm atëherë kur është embyllur nën mbledhjen, prodhimin skalar dhe përmban 0.
Vërtetim: Ushtrim për lexuesin.
Shembull 2.8. Le të jetë V =R3 dhe P plani i përcaktuar nga vektorët u dhe v të cilët kalojnë nga origjina.Ky plan është hapësirë vektoriale sepse: përmban vektorin zero, shuma e çdo dy vektorëve në P është përsërinë P, dhe çdo vektor në P i shumëzuar me një skalar është përsëri në P.
Shembull 2.9. (Hapësira nul e një matrice:) Le të jetë A një matricë e dhënë. Shohim bashkësinë e tëgjithë vektorëve në Rn të cilët kënaqin ekuacionin
Ax = 0.
Këtë bashkësi e quajmë hapësira nul të A-së dhe është një nënhapësirë e Rn-së. Vërtetimi është i lehtë dheështë lënë si ushtrim.

54 T. Shaska
Përkufizim 2.3. Le të jetë V një hapësirë vektoriale mbi k dhe v1, . . . vn ∈ V. Atëherë, v është një kom-binim linear i v1, . . . vn në qoftë se mund të shkruhet si
v = r1v1 +·· ·+ rn vn
ku r1, . . . ,rn ∈ k.
Kemi lemën e mëposhtme:
Lema 2.2. Le të jetë V një hapësirë vektoriale dhe v1, . . . , vn ∈ V. Bashkësia W e të gjitha kombinimevelineare të v1, . . . , vn është një nënhapësirë e V-së.
Vërtetim: Ushtrime.
2.1.1 Vektorët linearisht të pavarur
Le të jetë V një hapësirë vektoriale dhe u1, . . . ,un vektorë në V.
Përkufizim 2.4. Vektorët u1, . . . ,un quhen linearisht të pavarur në qoftë se
r1u1 +·· ·+ rn un = 0
sjell si rrjedhim
r1 = ·· · = rn = 0,
në të kundërt, themi se u1, . . . ,un janë linearisht të varur.
Kështu që, bashkësia e vektorëve u1, . . . ,un janë linearisht të varur në qoftë se njëri prej tyre është ishprehur si kombinim linear i vektorëve të tjerë.
Shembull 2.10. Vërteto se u1 = (2,3,1), u2 = (1,2,1), dhe u3 = (1,1,1) janë linearisht të pavarur në R3.
Zgjidhje: Duhet të gjejmë nëse ekzistojnë r1,r2,r3, jo të gjithë zero, të tillë që
r1u1 + r2u2 + r3u3 = 0.
Kemi
(2r1 + r2 + r3,3r1 +2r2 + r3,r1 + r2 + r3) = (0,0,0)
Matrica e augmentuar dhe forma e saj e reduktuar row-eçelon është
[A | 0] = 2 1 1 0
3 2 1 01 1 1 0
[H | ] = 1 0 0 0
0 1 0 00 0 1 0
Meqënëse çdo rresht ka një pivot, atëherë sistemi ka një zgjidhje të vetme (r1,r2,r3) = (0,0,0). Si rrjedhim,u1,u2,u3 janë linearisht të pavarur.
Shembulli në vazhdim duhet të jetë i njohur për studentët të cilët kanë njohuri mbi ekuacionet difer-enciale:

2.1. PËRKUFIZIMI I HAPËSIRAVE VEKTORIALE 55
Shembull 2.11. Le të jetë L (R) hapësira vektoriale e të gjithë funksioneve me vlera reale në t . Vërteto seçiftet e funksioneve sin t ,cos t janë linearisht të pavarur.
Zgjidhje: Le të jetë r1,r2 ∈R të tillë qër1 sin t + r2 cos t = 0,
për çdo t ∈ R. Marrim t = 0, atëherë r2 = 0. Në qoftë se marrim t = π2 , atëherë r1 = 0. Kështu që, sin t dhe
cos t janë linearisht të pavarur.
Ushtrime:
1. Le të jenë U,W nënhapësira të V-së. Përcaktojmë shumën e nënhapësirave të U dhe W me
U+W := {u +w |u ∈ U, w ∈ W}.
Vërteto se U∩W dhe U+W janë nënhapësira të V-së.
2. Le të jetë u ∈ V =Rn dheWu := {v ∈ V |u · v = 0}.
Vërteto se Wu është një nënhapësirë e V-së.
3. Le të jetë S një bashkësi dhe V një hapësirë vektoriale mbi fushën k. Vërteto se bashkësia e funk-sioneve
f : S → k,
nën funksionin e mbledhjes dhe shumëzimit me një konstante është një hapësirë vektoriale.
4. Le të jetë L (R) një hapësirë vektoriale e të gjithë funksioneve me vlera reale në t . Vërteto se ciftete mëposhtme janë linearisht të pavarur.
i) t ,e t
ii) sin t ,cos2t
iii) te t ,e2t
iv) t , sin t .
5. Një matricë trekëndëshe e sipërme është një matricë A = [ai , j ] e tillë që ai , j = 0 për të gjitha i < j .Vërteto se hapësira e matricave të sipërme trekëndëshe është një nënhapësirë e Matn×n(R).
6. Vërteto se k[x] është një hapësirë vektoriale mbi fushën k.

56 T. Shaska
7. Le të jetë k një fushë dhe A := k[x] një unazë polinomiale. Shënojmë me An bashkësinë e poli-nomeve në A të gradës n. A është An një nënhapësirë e A-së? Justifiko përgjigjen.
8. Le të jetë k një fushë dhe A := k[x] unaza polinomiale. Shënojmë me Pn bashkësinë e polinomevenë A të gradës ≤ n. A është Pn një nënhapësirë e A-së? Justifiko përgjigjen.
9. Le të jetëQ bashkësia e numrave racional dhe
Q(p
2) := {a +bp
2 | a,b ∈Q}.
Vërteto se Q(p
2) është një hapësirë vektoriale mbi Q me veprimin e zakonshëm të mbledhjes dheshumëzimit skalar.
10. Dimë se bashkësia e numrave kompleks C është dhënë nga
C := {a +bi | a,b ∈R}
ku i =p−1. A është C një hapësirë vektoriale mbi R me veprimin e zakonshëm të mbledhjes dheshumëzimit skalar?
11. Le të jetë V bashkësia e matricave 2×2 të formës[0 xy 0
]ku x, y janë skalar cfarëdo në R. A është V një hapësirë vektoriale mbi R?
12. A është R një hapësirë vektoriale mbiQ?
2.2 Bazat dhe dimensionet
Në këtë seksion do të studiojmë dy koncepte shumë të rëndësishme të teorisë së hapësirave vektori-ale, atë të bazave dhe dimensioneve. Le të jetë V një hapësirë vektoriale mbi k dhe B := {v1, . . . , vn} ⊂ V.Shënojmë me W bashkësinë e të gjitha kombinimeve lineare të v1, . . . , vn në V. Themi se W është egjeneruar nga v1, . . . , vn .
Përkufizim 2.5. Le të jetë V një hapësirë vektoriale mbi k dhe B := {v1, . . . , vn} ⊂ V. Atëherë B është bazëe V-së në qoftë se plotësohen kushtet e mëposhtme:
i) V = ⟨v1, . . . , vn⟩ të tillë që v1, . . . , vn gjeneron Vii) v1, . . . , vn janë linearisht të pavarur.

2.2. BAZAT DHE DIMENSIONET 57
Shembull 2.12. Le të jetë V =R2. Një bazë e kësaj hapësire vektoriale është
B= {i , j }
ku i = (0,1) dhe j = (1,0).
Zgjidhje: Në të vërtetë, ne dimë prej kalkulusit se çdo vektor v ∈ R2 mund të shkruhet si një kombinimlinear i i -së dhe j -së si më poshtë:
v = r1i + r2 j
për ndonjë numër realë r1, r2. Kjo quhet baza standard e R2.
Teorema 2.1. Le të jetë V një hapësirë vektoriale mbi k dhe B := {v1, . . . , vn} baza e V-së. Në qoftë se
x1v1 +·· ·+xn vn = y1v1 +·· ·+ yn vn ,
atëherëxi = yi , për i = 1, . . . ,n.
Vërtetim: Ngax1v1 +·· ·+xn vn = y1v1 +·· ·+ yn vn
marrim(x1 − y1)v1 +·· ·+ (xn − yn)vn = 0.
Meqënëse B := {v1, . . . , vn} është një bazë e V-së, atëherë v1, . . . , vn janë linearisht të pavarur. Kështu që
xi = yi , for i = 1, . . . ,n.
Teorema sjell si rrjedhim përkufizimin e mëposhtëm:
Përkufizim 2.6. Le të jetë V një hapësirë vektoriale, B := {v1, . . . , vn} një bazë e V-së, dhe u ∈ V e dhënënga
u := x1v1 +·· ·+xn vn .
atëherë (x1, . . . , xn) quhen kordinatat e u-së në lidhje me B-në.
Teorema 2.2. Le të jetë V një hapësirë vektoriale mbi fushën k dhe B1 dhe B2 bazat e V-së të tilla që|B1| = m dhe |B2| = n. Atëherë, m = n.
Vërtetim: Le të jenë bazat B1 dhe B2 të tilla që
B1 = {v1, . . . , vm} dhe B2 = {w1, . . . , wn}
dhe supozojmë se m < n.Meqënëse {v1, . . . , vn} është një bazë, atëherë ekziston x1, . . . , xn ∈ k të tilla që
w1 = x1v1 +·· ·+xm vm .
Dimë se w1 6= 0, meqënëse B2 është një bazë, atëherë të paktën një prej x1, . . . , xm është e ndryshme ngazero. Pa humbur gjeneralitetin, mund të supozojmë se x1 6= 0. Atëherë kemi
x1v1 = w1 −x2v2 −·· ·−xm vm

58 T. Shaska
Kështu që,
v1 = 1
x1w1 − x2
x1v2 −·· ·− xm
x1vm .
Nënhapësira W e gjeneruar nga {w1, v2, . . . , vm} përmban v1. Kështu që, W = V. Vazhdojmë këtë proce-durë derisa zëvendësojmë të gjitha v2, . . . , vm me w2, . . . wm . Kështu që kemi se bashkësia
{w1, . . . , wm}
gjeneron V-në. Atëherë për çdo i > m kemi wi -të si një kombinim linear të w1, . . . , wm . Kjo bie në kon-tradiktë sepse w1, . . . , wn janë linearisht të pavarur meqënëse B2 është një bazë. Kështu që, m ≥ n. Dukendërruar vendet e B1 dhe B2 marrim m = n.
Prej nga kemi përkufizimin e mëposhtëm.
Përkufizim 2.7. Le të jetë V një hapësirë vektoriale dhe B një bazë e V-së. Atëherë,
dim(V) := |B|
quhet dimensioni i V-së.
Hapësirat vektoriale me dimension të fundëm quhen hapësirë vektoriale me dimension të fundëm.Në këtë libër do të studiojmë kryesisht hapësirat vektoriale me dimension të fundëm.
Le të jetë V një hapësirë vektoriale. Nënhapësira W e V-së me dimension dim(W) = 1 quhet drejtëzdhe nënhapësira me dimension 2 quhet plan.
Teorema e mëposhtme është shumë e rëndësishme për të gjetur një bazë. Vërtetimin e saj nuk do tatrajtojmë.
Teorema 2.3. Le të jetë V një hapësirë vektoriale me di m(V) = n dhe {v1, . . . , vn} linearisht të pavarur.Atëherë, {v1, . . . , vn} është bazë për V-në.
Vërtetim: Ushtrime.
Rrjedhim 2.1. Le të jetë V një hapësirë vektoriale dhe W një nënhapësirë e V-së. Në qoftë se dim(W) =dim(V), atëherë W = V.
Vërtetim: Marrim një bazëB= {w1, . . . wn} të W. Kështu që, w1, . . . , wn janë linearisht të pavarur. Atëherënga teorema e mësipërme ata gjenerojnë V-në.
Rrjedhim 2.2. Le të jetë V një hapësirë vektoriale dhe W një nënhapësirë e V-së. Atëherë
dim(W) ≤ dim(V).
Vërtetim: Ushtrim.
Shembull 2.13. Le të jenë u = (1,3) dhe v = (2,7) vektorë në V =R2. Cfarë është hapësira W = ⟨u,v⟩?Zgjidhje: Nga shembujt e mësipërm dimë se dim(V) = 2. Atëherë nga rrjedhimi i mësipërm
dim(W) ≤ 2.
Meqënëse u dhe v nuk janë shumëfisha të njëri tjetrit, atëherë ata janë të pavarur. Kështu që, dim(W) = 2.Nga Rrjedhimi 2.1 kemi se W =R2.

2.2. BAZAT DHE DIMENSIONET 59
2.2.1 Një bazë për Matn×n(R)
Shembujt e bazave që kemi parë deri janë nga hapësirat Rn . Gjithsesi, rezultatet e mësipërme janë tëvërteta për çdo hapësirë vektoriale. Pra cfarë është një bazë dhe dimensioni i Matn×n(R)?
Shembull 2.14. Le të jetë V = Mat2×2(R). Gjej një bazë për V-në dhe dimensionin e tij.
Zgjidhje: Së pari vëmë re se çdo matricë
A =[
a bc d
]∈ V
mund të shkruhet si
A =[
a bc d
]= a
[1 00 0
]+b
[0 10 0
]+ c
[0 01 0
]+d
[0 00 1
]Kështu që bashkësia B= {M1,M2,M3,M4} ,ku
M1 =[
1 00 0
], M2 =
[0 10 0
], M3 =
[0 01 0
], M4 =
[0 00 1
],
gjeneron të gjitha elementet e V-së. A janë M1,M2,M3,M4 linearisht të pavarur? Në qoftë se
r1M1 + r2M2 + r3M3 + r4M4 = 0,
tëherë [r1 r2
r3 r4
]=
[0 00 0
]e cila na jep
r1 = r2 = r3 = r4 = 0.
Kështu që, B është një bazë e V-së dhe dim(V) = 4.
Vërejtje. Në përgjithësi, mund të gjejmë një bazë të Matn×n(k) si më sipër dhe të vërtetojmë se dimen-sioni është n2.
2.2.2 Gjetja e bazës e një nënhapësire në kn
Le të jenë w1, . . . ,wm vektor nëRn dhe W = Span(w1, . . . ,wm). Nga Lema 2.2, W është një nënhapësirëe Rn-së. Ne duam të gjejmë një bazë për W. Së pari duhet të shohim nëse w1, . . . ,wm janë të pavarur.Kështu që, duhet të gjejmë skalar r1, . . . ,rm ∈R të tillë që
r1w1 +·· ·+ rm wm = 0.
Le të jetë w1, . . . ,wm si më poshtë:
w1 = (w1,1, . . . , w1,n)
w2 = (w2,1, . . . , w2,n)
. . .
. . .
wm = (wm,1, . . . , wm,n)
(2.8)

60 T. Shaska
Atëherër1w1 +·· ·+ rm wm = 0
sjell se w1,1r1 +w2,1r2 +·· ·+wm,1rm = 0
w1,2r1 +w2,2r2 +·· ·+wm,2rm = 0
. . . . . . . . . . . . . . . . . . . . . . . .
w1,nr1 +w2,nr2 +·· ·+wm,n rm = 0
Kështu që kemi sistemin w1,1 w2,1 . . . wm,1
w1,2 w2,2 . . . wm,2
. . . . . . . . . . . .
w1,n w2,n . . . wm,n
·
r1
r2
r3
rm
=
000
0
.
i cili mund të shkruhet si
[w1 |w2 | · · · |wm ] ·
r1
r2
r3
rm
=
000
0
.
Për të zgjidhur këtë sistem gjejmë formën row-eçelon të matricës
A = [w1 | w2 | . . . | wm].
Në qoftë se forma row-eçelon ka nga një pivot në secilën kolonë, atëherë w1, . . . ,wm janë linearisht tëpavarur, në të kundërt janë linearisht të varur. Vektorët të cilët formojnë bazë në këtë rast janë të njëjtëtvektorë korespondues me kolonat me pivot. Pra kemi algoritmin e mëposhtëm:
Algorithm 3. Input: Një nënhapësirë W e gjeneruar nga w1, . . . ,wm në kn .Output: Një bazë e W-së
i) Nga matrica A = [w1 | w2 | . . . | wm]ii) Gjej formën row-eçelon të A-sëiii) Kolonat me pivot vijnë prej wi -ve, të cilat formon një bazë për W.
Shembull 2.15. Le të jetë W = Span(w1,w2,w3,w4) ⊂R4 të tilla që
w1 = (1,2,3,1)
w2 = (−1,3,1,5)
w3 = (2,4,2,6)
w4 = (3,3,1,5)
(2.9)

2.2. BAZAT DHE DIMENSIONET 61
Gjej një bazë për W.
Zgjidhje: Formojmë matricën A = [w1, . . . ,wn].
A =
1 -1 2 32 3 4 33 1 2 11 5 6 5
Forma e reduktuar row-eçelon e A-së është
1 0 0 − 25
0 1 0 − 35
0 0 1 75
0 0 0 0
Kështu që, baza e W-së është B= {w1,w2,w3}.
Teorema 2.4. dim(Rn) = n
Vërtetim: Marrim bashkësinë
B= {(1,0, . . . ,0), (0,1,0, . . . ,0), . . . , (0, . . . ,1)}
e vektorëve elementar. Eshtë e qartë se kjo bashkësi gjeneron Rn meqënëse çdo vektor në Rn mund tëshkruhet si një kombinim linear elementësh në B.
Krijojmë matricën A = [w1, . . . ,wn]. Atëherë A = I, pra është në formën e reduktuar row-eçelon.Meqënëse çdo kolonë ka një pivot, atëherë elementët e B-së janë linearisht të pavarur.
Baza B quhet baza standarte e Rn .
Shembull 2.16. Le të jetë P4 hapësira vektoriale e polinomeve me koeficientë realë dhe gradë ≤ 4. Përcaktonëse { f1, f2, f3, f4, f5} të dhëna si më poshtë
f1 = 2x4 −x3 +2x2 −1
f2 = x4 −x
f3 = x4 +x3 +x2 +x +1
f4 = x2 −1
f5 = x −1
formojnë një bazë për P4.
Zgjidhje: Marrim bazën B= {x4, x3, x2, x,1} për P4. Lexuesi duhet të verifikojë se kjo është një bazë për P4.Atëherë kordinatat e f1, f2, f3, f4, f5 në lidhje me bazënB janë
f1 = (2,−1,2,0,−1)
f2 = (1,0,0,−1,0)
f3 = (1,1,1,1,1)
f4 = (0,0,1,0,−1)
f5 = (0,0,0,1,−1)

62 T. Shaska
Ne mund të përcaktojmë nëse polinomët janë të pavarur duke përcaktuar së pari nëse kordinatat e vek-torëve korespondues në R5 janë të pavarur. Matrica koresponduese është
2 1 1 0 0-1 0 1 0 02 0 1 1 00 -1 1 0 1
-1 0 1 -1 -1
dhe forma e saj e reduktuar row-eçelon është matrica identike I5. Meqënëse çdo kolonë ka një pivot atëherëvektorët janë të pavarur nëR5 dhe si rrjedhim f1, . . . f5 janë të pavarur në P4. Dimensioni i P4 është dimP4 =5. Kështu që { f1, f2, f3, f4, f5} formon një bazë për P4.
Ushtrime:
1. Le të jetë V një hapësirë vektoriale mbi k. Në qoftë se një bashkësi vektorësh është linearisht epavarur në V, provo se bashkësia nuk e përmban vektorin zero.
2. Le të jetë W = Span(w1,w2,w3) ⊂R4 e tillë që
w1 = (1,2,3,1)
w2 = (−1,3,1,5)
w3 = (1,4,0,6)
(2.10)
Gjej një bazë për W.
3. Le të jetë W = Span(w1,w2) ⊂R6 të tillë që
w1 = (1,2,3,1,9,5)
w2 = (2,4,6,2,18,10)(2.11)
Gjej një bazë për W.
4. Vërteto se çdo bashkësi B ⊂ Rn , n vektorësh jo-zero të cilët janë dy nga dy pingulë formojnë njëbazë për Rn .
5. Le të jetë V = Mat3×3(R). Gjej një bazë për V dhe dimensionin e V-së.
6. Le të jetë V = k[x]. Vërteto se
f1 = x6 +x4 dhe f2 = x6 +3x4 −x,
janë linearisht të pavarur.

2.3. HAPËSIRA NUL DHE RANGU I NJË MATRICE 63
7. Le të jetë k një fushë dhe V := k[x] hapësira vektoriale e polinomeve në x. Shëno me Pn hapësirëne polinomeve në V të gradës ≤ n. Gjej një bazë për Pn .
8. Le të jetë V hapësira vektoriale e funksioneve f :R→R. Le të jetë W nënhapësira e V-së e tillë që
W := Span (sin2 x,cos2 x).
Vërteto se W përmban të gjithë funksionët konstant.
9. Le të jetë V hapësira vektoriale e funksioneve f :R→R. Vërteto se bashkësia
{1,sin x, sin2x, . . . , sinnx}
është një bashkësi e pavarur vektorësh në V.
10. Le të jetë V hapësira vektoriale e funksioneve f :R→R. Gjej një bazë të nënhapësirës
W = Span (3− sin x,2sin2x − sin3x,3sin2x − sin4x, sin5x − sin2x}.
Udhëzim : Përdor ushtrimin e mëparshëm.
Ushtrime programimi:
1) Shkruaj një program kompjuteri, i cili llogarit një bazë për
W = Span(w1, . . . ,wn) ⊂Rn .
2.3 Hapësira nul dhe rangu i një matrice
Le të jetë A një matricë m ×n mbi k. Marrim në konsideratë të gjitha rreshtat Ri të A-së. Këta janëvektorë në kn . Hapësira e gjeneruar nga vektorët-rradhë të A-së quhet hapësira e rradhëve e A-së. Në tënjëjtën mënyrë vektorët-kolonë të A-së janë vektorë në km dhe hapësira e gjeneruar e vektorëve-kolonëquhet hapësira e kolonave e A-së. Si më parë hapësira nul e A-së do të jetë bashkësia e zgjidhjeve tëA-së.
Teorema 2.5. Le të jetë A një matricë m ×n. Dimensioni i hapësirës rresht është i njëjtë me dimensionin ehapësirës kolonë. Ky dimension i përbashkët është i barabartë me numrin e pivotëve të formës row-eçelontë A-së.
Vërtetim: Përdorim metodën e mësipërme për të gjetur dimensionin për të dy rastet. Ky dimension ështënumri i pivotëve.
Ky dimension i përbashkët quhet rangu i A-së dhe shënohet me rank (A). Dimension i hapësirësnul quhet nulitet i A-së dhe shënohet me null (A).

64 T. Shaska
Teorema 2.6. Le të jetë A një matricë m ×n dhe H forma e saj row-eçeloni) rank (A) = numri i pivotëve të H-sëii) null (A)= numri i kolonave pa asnjë pivot
Për më tepër,rank (A)+null (A) = n
Vërtetim: Na ka mbetur për të treguar se null (A) është i barabartë me numrin e kolonave pa pivot nëformën row-eçelon. Kjo është e qartë, meqënëse numri i ndryshore të lira për sistemin korespondueslinear është i barabartë me numrin e kolonave pa pivot të A-së në formën row-eçelon .
Shembull 2.17. Gjej rangun, nulitetin , një bazë për hapësirën rresht, një bazë për hapësirën kolonë, dhenjë bazë për hapësirën nul të matricës
A = 2 1 1
3 2 21 1 1
Zgjidhje: Së pari gjejmë formë e reduktuar row-eçelon të A-së.
A = 2 1 1
3 2 21 1 1
H = 1 0 1
0 1 10 0 0
Atëherë
rank (A) = 2 dhe null (A) = 1.
Një bazë për hapësirën kolonë është
B1 =
231
,
121
.
Për të gjetur një bazë të hapësirës rresht përdorim rreshtat e H-së të cilët përmbajnë pivot. Pra kemi
B2 = {(1,0,1), (0,1,1)}.
Për të gjetur një bazë për hapësirën nul na duhet të zgjidhim sistemin
Hx = 0
Matrica e augmentuar është:
[H | 0] = 1 0 1 0
0 1 1 00 0 0 0
Kështu që, x3 është një ndryshore e lirë dhe x2 +x3 = 0 dhe x1 +x3 = 0. Zgjidhja është
x = -x3
-x3
x3
= x3
- 1-11
Pra, një bazë për hapësirën nul është
B3 =
- 1-11
.

2.3. HAPËSIRA NUL DHE RANGU I NJË MATRICE 65
2.3.1 Gjetja e një baze për hapësirat-rresht, hapësirat-kolonë dhe hapësira nul e njëmatrice.
Na është dhënë një matricë A m ×n, duam të gjejmë bazat e hapësirave të shoqëruara të. Kemi algo-ritmin e mëposhtëm:
Algorithm 4. Input: Një matricë A m ×nOutput: Një bazë për hapësirën rresht, hapësirën kolonë dhe hapësira nul e A-së
i) Gjej formën e reduktuar row-eçelon H të A-sëii) Kolonat e A-së të cilat i korespondojnë kolonave me pivot të H-së, formojnë një bazë për
hapësirën kolonë.iii) Rreshtat jozero të H-së formojnë një bazë për hapësirën rresht.iv) Përdor zëvendësimin nga fundi për të zgjidhur Hx = 0.
Shembull 2.18. Gjej bazat e hapësirave të shoqëruar me A
A = 1 2 -1 3
1 1 2 12 -1 1 2
Zgjidhje: Forma e reduktuar row-eçelon është
H =
1 0 0 3/2
0 1 0 1/2
0 0 1 -1/2
Një bazë për hapësirën kolonë është
112
,
21-1
,
-121
Rangu i A-së është rank (A) = 3 dhe null (A) = 1. Kështu që, ekziston një ndryshore e lirë të cilën e shënojmëme x4. Duke zgjidhur Hx = 0 kemi
x =
- 32 x4
- 12 x4
12 x4
x4
= x4
- 32
- 12
12
1

66 T. Shaska
Një bazë për hapësirën nul është
B=
- 32
- 12
12
1
.
Për një bazë të hapësirës rresht marrim tre rreshtat e H-së.
Shembull 2.19. Gjej rangun, nulitetin dhe një baze për hapësirën kolonë, hapësirën rresht dhe hapësirënnul të një matrice.
A = 4 2 3 3
-2 1 1 23 -1 2 1
Zgjidhje: Forma e reduktuar row-eçelon e A-së është
H =
1 0 0 - 6
23
0 1 0 923
0 0 1 2523
Atëherë,
rank (A) = 3, null (A) = 1
Për bazën e hapësirës kolonë kemi 4
-23
,
21-1
,
312
Për bazën e hapësirës rresht marrim tre rreshtat e A-së, meqënëse secila prej tyre përmban nga një pivot.Pastaj gjejme një bazë për hapësirën nul. Kështu që, duhet të zgjidhim sistemin
Hx = 0.
Zgjidhja është
x =
- 623
923
2523
1
· x4 =
- 6
9
25
23
· t ,

2.3. HAPËSIRA NUL DHE RANGU I NJË MATRICE 67
për disa ndryshore të lira t . Kështu që, një bazë është
B=
- 69
2523
Teorema në vazhdim lidh disa nga çështjet e mëparshme të këtij seksioni.
Teorema 2.7. Le të jetë A një matricë n ×n. Pikat e mëposhtme janë ekuivalente:i) Ax = b ka një zgjidhje të vetme për çdo b ∈Rn .ii) A është ekuivalente sipas radhëve me In
iii) A ka të anasjelltëiv) Vektorët sipas kolonave të A-së formojnë një bazë për Rn
Vërtetim: Ushtrime Rezultati i mëposhtëm është shumë i përdorshëm në rastet kur duam të gjejmëtë anasjelltin.
Rrjedhim 2.3. Le të jetë A një matricë n ×n. Atëherë A ka të anasjelltë atëherë dhe vëtëm atëherë kur
rank (A) = n.
Ushtrime:
1. Gjej rangun, një bazë për hapësirën rresht, një bazë për hapësirën kolonë dhe një bazë për hapësiënnul për matricat e mëposhtme.
2 3 2 11 1 0 12 3 1 -1
,
1 1 11 2 33 4 5
,
1 2 34 5 67 8 9
2. Le të jetë A një matricë katrore. Vërteto se
null (A) = null (At ).
3. Le të jenë A, B matrica të tilla që produkti AB është i përcaktuar. Vërteto se
rank (AB) ≤ rank (A).
4. Jep një shembull dy matricash A,B të tilla që
rank (AB) < rank (A).
5. Le të jetë A një matricë m ×n. Provo se
rank (AAt ) = rank (A).

68 T. Shaska
6. Le të jenë u dhe v vektorë sipas kolonave linearisht të pavarur në R3 dhe A një matricë 3×3 e cilaka të anasjelltë. Provo se vektorët Au dhe Av janë linearisht të pavarur.
7. Përgjithëso problemin e mësipërm në Rn . Le të jenë u1, . . . ,un vektorë sipas kolonave linearisht tëpavarur në Rn dhe A një matricë n ×n e cila ka të anasjelltë. Provo se vektorët Au1, . . . , Aun janëlinearisht të pavarur.
8. Le të jenë u dhe v vektorë sipas kolonave nëR3 dhe A një matricë 3×3 e cila ka të anasjelltë. Provo senë qoftë se vektorët Au dhe Av janë linearisht të pavarur atëherë u dhe v janë linearisht të pavarur.
9. Përgjithëso problemin e mësipërm në Rn . Le të jenë u1, . . . ,un vektorë sipas kolonave në Rn dhe Anjë matricë n ×n e cila ka të anasjelltë. Provo se në qoftë se vektorët Au1, . . . , Aun janë linearisht tëpavarur atëherë u1, . . . ,un janë linearisht të pavarur.
10. Le të jetë
A =[
cosθ −sinθsinθ cosθ
]për një kënd θ. Merr çdo vektor u ∈R2 dhe krahasoje me vektorin Au. Çfarë ndodh gjeometrikisht?
11. Le të jetë A si në ushtrimin e mësipërm dhe {u,v} një bazë në R2. Vërteto se {Au, Av} është një bazëpër R2. Ndoshta duhet parë hapësira nul e A.
Ushrime Programimi:
1) Shkruaj një program kompjuteri i cili llogarit rangun dhe nulitetin e një matrice të dhënë.
2) Shkruaj një program kompiuteri i cili gjen një bazë për hapësirën nul, hapësirën kolonë dhehapësirën rresht të një matrice të dhënë.
2.4 Shuma, shuma direkte dhe prodhimi direkt
Le të jetë V një hapësirë vektoriale me dimension të fundëm dhe U,W nënhapësira të saj. Shënojmëshumën U+W të nënhapësirave U dhe W si më poshtë
U+W := {u +w | u ∈ U, w ∈ W}
Kjo bashkësi U+W është një nënhapësirë e V-së. Shiko ushtrimin 1 në fund të këtij seksioni.
Lema 2.3. Le të jetë V një hapësirë vektoriale me dimension të fundëm dhe U,W nënhapësira e saj. Atëherë
dim(U+W) = dimU+dimW −dim(U∩W).
Vërtetim: Ushtrim.

2.4. SHUMA, SHUMA DIREKTE DHE PRODHIMI DIREKT 69
2.4.1 Shumat direkte
Themi se V është shumë direkte e U-së dhe W-së, e shënuar me V = U⊕W, në qoftë se çdo elementv në V shprehet në mënyrë të vetme si shumë e
v = u +w
për ndonjë u ∈ U dhe w ∈ W.
Teorema 2.8. Le të jenë U,W nënhapësira të hapësirës vektoriale V. Në qoftë se V = U+W dhe U∩W = {0},atëherë
V = U⊕W.
Vërtetim: Le të jetë v në V dhe v = u + w për ndonjë u ∈ U dhe w ∈ W. Për të provuar se V është njëshumë direkte na duhet të tregojmë se u dhe w janë të përcaktuar në mënyrë të vetme. Supozojmë seekzistojnë u′ dhe w ′ të tillë që v = u′+w ′. Atëherë,
v − v = (u −u′)+ (w −w ′) = 0
Kështu që, u −u′ = w ′−w . Meqënëse u −u′ =∈ U dhe w −w ′ ∈ W, atëherë
(u −u′) = (w ′−w) ∈ U∩W = {0}
Pra,u = u′ dhe w = w ′.
Kjo plotëson vërtetimin.
Teorema 2.9. Le të jetë V një hapësirë vektoriale me dimension të fundëm mbi k dhe W një nënhapësirë eV-së. Atëherë, ekziston një nënhapësirë U ⊂ V e tillë që
V = U⊕W
Vërtetim: Le të jenë dimV = n dhe dimU = r , ku r < n. Le të jetë
B= {b1, . . . ,bn}
një bazë për V. Atëherë mund të zgjedhim r elementë të B-së, të cilët cilët formojnë një bazë për U, psh.b1, . . . ,br . Le të jetë
W := {br+1, . . . ,bn}
Eshtë e qartë se V = U+W. Gjithashtu U∩W = {0}, në të kundërt b1, . . . ,bn nuk janë linearisht të pavarur.Nënhapësira U quhet komplement i W-së në V.
Shembull 2.20. Le të jetë V =R3 dheB= {i , j ,k}
baza standarte e saj. Le të jetëU := ⟨i , j ⟩
atëherë, nga teorema e mësipërmeV := U⊕W
ku W = ⟨k⟩. Kështu qëR3 = ⟨i , j ⟩⊕⟨k⟩

70 T. Shaska
Teorema 2.10. Le të jetë V një hapësirë vektoriale me dimension të fundëm mbi k, e tillë që V = U ⊕W.Atëherë,
di m(V) = di m(U)+di m(W)
Vërtetim: Le të jenë B1 dhe B2 baza për U dhe W respektivisht. Themi
B1 = {u1, . . . ,ur }
B2 = {w1, . . . ,ws }
Atëherë çdo element i U-së mund të shkruhet si një kombinim i vetëm linear i
u = x1u1 +·· ·+xr ur
dhe çdo element i W-së mund të shkruhet si një kombinim linear i vetëm i
w = y1w1 +·· ·+ ys wr
Pra, çdo element i V-së mund të shkruhet si një kombinim linear i vetëm i
v = x1u1 +·· ·+xr ur + y1w1 +·· ·+ ys wr
Kjo tregon se bashkësia{u1, . . . ,ur ,w1, . . . ,ws }
formon një bazë për V-në. Përkufizimi i shumës direkte mund të përgjithësohet për disa shuma.Themi se
V =n⊕
i=1Vi = V1 ⊕·· ·⊕Vn
në qoftë se çdo element në V mund të shkruhet në mënyrë të vetme si shumë
v = v1 +·· ·+ vn , wi th vi ∈ Vi .
2.4.2 Prodhimi direkt
Përkufizimi i prodhimit direkt është i bazuar në prodhimin kartezian. Përsëritim disa nga përku-fizimet më të rëndësishme të prodhimit kartezian. Le të jenë U dhe W hapësira vektoriale mbi një fushëk. Le të jetë U×W bashkësia e të gjithë çifteve të (u,w) të tillë që u ∈ U dhe w ∈ W, dmth dhe w ∈ W. Pra,
U×W := {(u,w) | u ∈ U,w ∈ W}
Shumën e çdo dy çifteve të renditura (u1,w1) dhe (u2,w2) e shënojmë si më poshtë
(u1,w1)+ (u2,w2) = (u1 +u2,w1 +w2)
Shumëzimin skalar e shënojmë si më poshtë: për çdo r ∈ k,
r (u,w) = (r u,r w)
Ushtrim: Vërteto se U×W me këtë shumë dhe prodhim skalar është një hapësirë vektoriale mbi k.

2.4. SHUMA, SHUMA DIREKTE DHE PRODHIMI DIREKT 71
Përkufizim 2.8. Hapësira vektoriale U×W quhet prodhim direkt i U-së dhe W-së.
Lema 2.4. Le të jenë U,W hapësira vektoriale. Atëherë,
dim(U×W) = dimU+dimW
Vërtetim: Vërtetimi është lënë për lexuesin.
Përkufizimi i prodhimit skalar mund të përgjithësohet për disa faktorë. Për shembull
V :=n∏
i=1Vi = V1 ×·· ·×Vn
është bashkësia e n-elementëve të radhitur, ku mbledhja dhe shumëzimi skalar janë të përcaktuar koor-dinatë për koordinatë.
Ushtrime:
1. Le të jenë V = R2 dhe W nënhapësira të gjeneruara nga w = (2,3). Le të jetë U një nënhapësirë egjeneruar nga u = (1,1). Vërteto se V është shuma direkte e W-së dhe U-së. A mund ta përgjithë-soni këtë për çdo dy vektorë u dhe w?
2. Le të jetë V = R3. Le të jetë W hapësira e gjeneruar nga w = (1,0,0) dhe le të jetë U nënhapësira egjeneruar nga u1 = (1,1,0) dhe u2 = (0,1,1). Vërteto se V është shuma direkte e W-së dhe U-së.
3. Le të jenë u dhe v dy vektorë jozero në R2. Nëse nuk ekziston një c ∈ R e tillë që u = cv, vërtetose {u,Bv} është një bazë e R2 dhe se R2 është një shumë direkte e nënhapësirës së gjeneruar ngaU = ⟨u⟩ dhe V = ⟨v⟩ respektivisht.
4. Le të jenë U dhe W nënhapësira të V-së. Cfarë janë U+U, U+V? A është U+W = W +U?
5. Le të jenë U,W nënhapësira të hapësirës vektoriale V. Vërteto se
dimU+dimW = dim(U+W)+dim(U∩W)
6. Le të jetë V = Mat2×2(k),
U :={[
a b-b a
]| a,b ∈ k
}dhe
W :={[
a bb -a
]| a,b ∈ k
}.

72 T. Shaska
Vërteto se:
i) U dhe W janë nënhapësira të V-së.
ii) V = U⊕W
7. Le të jenë U dhe W nënhapësira të hapësirës vektoriale V.
i) Vërteto se U∩W ⊂ U∪W ⊂ U+W.
ii) Kur është U∪W një nënhapësirë e V-së?
ii Cila është nënhapësira më e vogël e V-së e cila përmban U∪W?
8. Le të jetë V një hapësirë vektoriale mbi k dhe S bashkësia e të gjithave nënhapësirave të V-së. Kon-siderojmë veprimin e mbledhjes së nënhapësirës në S . Vërteto se ekziton një zero në S për këtëveprim dhe ky veprim ka vetinë e shoqërimit.
9. Le të jetë V një hapësirë vektoriale mbi k dhe S bashkësia e të gjithave nënhapësirave të V-së. Kon-siderojmë veprimin e prerjes në S . Vërteto se ky veprim ka vetinë e shoqërimit. A ekziston njëidentitet për këtë veprim (dmth, ekziston një E ∈S i tillë që A∩E = A, për çdo E in S )?
2.5 Funksionet lineare ndërmjet hapësirave vektoriale
Në këtë seksion do të studiojmë funksionet ndërmjet hapësirave vektoriale. Ne jemi të interesuar nëfunksione të cilët ruajnë veprimet në hapësirën vektoriale. Para se të përkufizojmë këta funksione, duhettë përsëritni përkufizimet e funksioneve injektive, syrjektive dhe bijektive nga kalkulusi. Le të jenë V dheV′ hapësira vektoriale mbi të njëjtën fushë k.
Përkufizim 2.9. Një funksion
T : V → V′
do të quhet funksion linear në qoftë se kushti i mëposhtëm është i vërtetë për çdo u,v ∈ V dhe r ∈R:
i) T(u+v) = T(u)+T(v),ii) T(r ·u) = r ·T(u)
Shembull 2.21. Le të jetë V =Rn dhe A një matricë n ×n. Përcaktojmë funksionin e mëposhtëm:
TA : V −→ V
x −→ A ·x(2.12)
Mund ta vërtetojmë shumë lehtë se ky është një funksion linear.

2.5. FUNKSIONET LINEARE NDËRMJET HAPËSIRAVE VEKTORIALE 73
Shembull 2.22. Le të jenë U dhe V hapësira vektoriale mbi k. Përcaktojmë Përcaktojmë bashkësinë e tëgjithë funksioneve linear f : U → V me
L (U,V) := { f : U → V | f ështëlinear }
Përcaktojmë mbledhjen në L (U,V) si mbledhjen e zakonshme të funksioneve dhe shumëzimi skalar do tëjetë shumëzimi me një konstante nga k. Me një fjalë,
( f + g )(u) = f (u)+ g (u)
r ∗ f (u) = r · f (u)
E lëmë si ushtrim për lexuesin vërtetimin se L (U,V) është një hapësirë vektoriale mbi k. Kjo është njëhapësirë e rëndësishme të cilën do ta përdorim përsëri më vonë.
Lema 2.5. Le të jetë T : V → W një funksion linear ndërmjet hapësirave vektoriale V dhe W. Atëherë po-himi i mëposhtëm është i vërtetë:
i) T(0V) = 0W .ii) Për çdo v ∈ V, T(−v) =−T(v).
Vërtetim: Vërtetimi është i thjeshtë.
T(0V) = T(v−v) = T(v)+T(−v) = T(v)−T(v) = 0W
Pjesa ii) është e qartë.
Përkufizim 2.10. Le të jetë T : U → V një funksion linear ndërmjet hapësirave vektoriale U dhe V. Kernelii T-së, i shënuar me ker (T) është i përcaktuar si më poshtë
ker (T) := {u ∈ U | T(u) = 0W}
Imazhi i T-së është i përcaktuar si:
Img (T) := {v ∈ V | ∃u ∈ U,T(u) = v}
Lema 2.6. Le të jetëT : V → W
një funksion linear. Atëherë,
i) ker (T) është një nënhapësirë e V-sëii) Img (T) është një nënhapësirë e W-së.
Vërtetim: Ushtrim Lema e mëposhtme është ndihmëse për të gjetur nëse një funksion linear ështëinjektiv ose jo.
Lema 2.7. Le të jetëT : V → W
një funksion linear. Atëherë ker (T) = {0V} atëherë dhe vetëm atëherë kur T është injektiv.

74 T. Shaska
Vërtetim: Supozojmë se ker (T) = {0V}. Atëherë, për çdo v1,v2 ∈ V të tillë që T(v1) = T(v2) kemi:
T(v1)−T(v2) = 0 =⇒ T(v1 −v2) = 0 =⇒ (v1 −v2) ∈ ker (T)
e cila do të thotë sev1 −v2 = 0 =⇒ v1 = v2
Supozojmë se T është injektiv dhe le të jetë v ∈ ker (T). Atëherë T(v) = T(0V) = 0W sjell se v = 0V .
Shembull 2.23. Le të jetë C(R) hapësira vektoriale e të gjithë funksioneve të diferencueshëm f : R→ R.Marrim në konsideratë funksionin
D : C(R) → C(R)
f (x) → D( f (x)) = f ′(x)
ku f ′(x) është derivati i f (x). Vërteto se D është një funksion linear.
Teorema 2.11. Le të jetë T : V → W, një funksion linear injektiv. Në qoftë se v1, . . . vn janë elementë linear-isht të pavarur në V, atëherë T(v1), . . . ,T(vn) janë elementë linearisht të pavarur në W.
Vërtetim: Le të jetëy1T(v1)+·· ·+ ynT(vn) = 0W
për skalarët y1, . . . , yn . AtëherëT(y1v1)+·· ·+T(yn vn) = 0W
e cila sjell seT(y1v1 +·· ·+ yn vn) = 0W
Meqënëse T është injektiv atëherë ker (T) = {0} dhe
y1v1 +·· ·+ yn vn = 0V
Kjo sjell sey1 = ·· · = yn = 0
meqënëse v1, . . . ,vn janë linearisht të pavarur. Kështu që T(v1), . . . ,T(vn) janë elementë linearisht tëpavarur në W.Teoremat e mëposhtme do ti pranojmë pa vërtetim.
Teorema 2.12. Le të jetë T : V → W një funksion linear. Atëherë,
dimV = dim ker (T)+dim Img (T)
Teorema 2.13. Le të jetë T : V → W një funksion linear dhe dimV = dimW. Në qoftë se ker (T) = {0} oseImg (T) = W, atëherë T është bijektiv.
Vërtetim: Në qoftë se ker (T) = {0}, atëherë T është injektiv dhe
dim Img (T) ≥ dimV = dimW
Kështu që Img T = W dhe T janë surjektiv.Në qoftë se Img (T) = W, atëherë T është syrjektiv dhe
dimker (T) = 0
Kështu që ker (T) = {0V} dhe T janë gjithashtu injektiv.
2.5. FUNKSIONET LINEARE NDËRMJET HAPËSIRAVE VEKTORIALE 75
Shembull 2.24. Le të jetë A matrica -1 2 34 5 67 8 9
dhe LA funksioni linear
LA : R3 −→R3
x −→ A ·x(2.13)
Përcakto nëse funksioni LA është bijektiv.
Zgjidhje: Në fillim përcaktojmë ker (LA). Ne duam të gjejmë të gjithë x ∈R3, të tillë që
T(x) = Ax = 0
Kështu që ker (LA) është i njëjtë si me hapësirën nul të A. Për të gjetur hapësirën nul procedojmë si mëposhtë: Forma e reduktuar row-eçelon është
H = 1 0 0
0 1 00 0 1
Kështu që rank (A) = 3, null (A) = 0 dhe hapësira nul e A-së është {0}. Kështu që, ker (LA) = {0} dhe LA janëinjektiv. Nga teorema e mëparshme arrijmë në përfundimin se LA është bijektiv.
2.5.1 Kompozimi i funksionëve linear, funksionëve të anasjelltë, izomorfizmave
Eshtë e natyrshme pyetja nëse kompozimi i dy funksionëve linear është gjithashtu linear ose nëse ianasjellti i një funksioni linear është linear.
Teorema 2.14. Le të jenë U,V,W hapësira vektoriale mbi një fushë k dhe f dhe g funksione lineare:
Uf−→ V
g−→ W
Atëherë funksioni
g ◦ f : U −→ W
është gjithashtu linear.
Vërtetim: Le të jetë u1,u2 ∈ U. Atëherë
(g ◦ f )(u1 +u2) = g(
f (u1 +u2))= g
(f (u1)+ f (u2)
)= (g ◦ f )(u1)+ (g ◦ f )(u2)
Gjithashtu,
(g ◦ f )(r ·u) = g(
f (r ·u)= g (r · f (u)) = r · (g ◦ f )(u)

76 T. Shaska
Shembull 2.25. Le të jenë A dhe B matrica me dimensione m ×n dhe n × s respektivisht dhe LA,LB funk-sione linear
Rm LA−→Rn LB−→Rs
të tillë që LA(x) = Ax dhe LB(x) = Bx. Funksioni LB ◦LA është i dhënë nga
LB ◦LA : Rm −→Rs
x −→ (BA) x
dhe mund të vërtetohet shumë lehtë që është linear.
Teorema 2.15. Le të jenë U,V hapësira vektoriale mbi një fushë k dhe f : U −→ V një funksion linear i cilika të anasjelltë f −1 : V −→ U. Atëherë, f −1 është linear.
Vërtetim: Ushtrim Le të jenë U,V hapësira vektoriale dhe
L : U −→ V
një funksion linear i cili ka të anasjelltë. Atëherë, L quhet izomorfizëm dhe U dhe V quhen hapësiraizomorfike.
Ushtrime:
1. Le të jetë T :R→R, i tillë që T(x) = sin x. A është T një izomorfizëm? Shpjego.
2. Le të jetë A = [ai j ] një matricë n ×n dhe me tr (A) shënojmë trace e saj. Vërteto se funksioni
tr : Matn×n(k) −→ k
A −→ tr (A)
është një funksion linear.
3. Le të jetë L ([0,1],R) bashkësia e funksionëve të integrueshëm në intervalin [0,1]. Kontrollo nësefunksioni
φ : L ([0,1],R) −→L (R)
f (x) −→∫ 1
0f (x)d x
është një funksion linear.
4. Le të jetë T :Rn →Rn një funksion linear i dhënë nga T(x) = Ax, për ndonjë matricëA n×n e cila katë anasjelltë. Vërteto se T është një bijeksion.

2.6. MATRICAT E SHOQËRUARA ME FUNKSIONET LINEARE 77
5. Le të jetë P4 një hapësirë vektoriale e polinomëve me koeficienta realë dhe me gradë ≤ 4. Vërtetose P4 është izomorfike me R5.
6. Përgjithëso rezultatin e mësipërm. Pra, provo se Pn është izomorfike me Rn+1.
7. A mund të gjeni dy hapësira vektoriale me të njëjtin dimension, të cilat nuk janë izomorfike? Shp-jegojeni.
8. Dimë se C është një hapësirë vektoriale mbi R. Përcaktojmë funksionin T : C → C, të tillë qëT(z) = z, ku z është i konjuguari kompleks i z-së. A është T një funksion linear?
9. Le të jetë T : C→ C, e tillë që T(z) = z + z0, ku z0 është një numër kompleks i dhënë. A është T njëizomorfizëm?
10. Le të jetë T :C→C, e tillë që
T(z) =
1
zfor z 6= 0
0 for z = 0
A është T një izomorfizëm? Shpjego.
2.6 Matricat e shoqëruara me funksionet lineare
Një nga gjërat më të mira të algjebrës lineare është se çdo funksioni linear mund ti shoqërojmë njëmatricë dhe anasjelltas. Kështu që, ne mund të përdorim vetitë e matricave për të kuptuar funksionëtlinear. Në këtë seksion ne do të gjejmë se si mund të gjejmë matricën kur na është dhënë funksioni.
Le të jenë V dhe U hapësira vektoriale me dimension të fundëm mbi një fushë k dhe
L : U −→ V
një funksion linear. Për më tepër, le të jenë
B1 := {u1, . . . ,un}
B2 := {v1, . . . . . . ,vm}
baza për U dhe V respektivisht. Atëherë vlerat e L(u1), . . . ,L(un) janë si më poshtë:
L(u1) = a1,1 v1 +·· ·a1,m vm
L(u2) = a2,1 v1 +·· ·a2,m vm
· · · · · · · · ·L(un) = an,1 v1 +·· ·an,m vm

78 T. Shaska
për ndonjë skalar ai , j ∈ k. Marrim matricën n ×m dhënë me A = [ai , j ], ku ai , j janë si më poshtë. Etranspozuara e saj At është matrica m ×n
At =
a1,1 a2,1 · · · an,1
a1,2 a2,2 · · · an,2
· · · · · ·a1,m a2,m · · · an,m
e cila quhet matrica e shoqëruar me funksionin linear L në varësi të bazave B1 dhe B2 dhe e shënojmë
MB2B1
(L).Në të vërtetë, çdo vektor x ∈ U shkruhet si
x = x1u1 +·· ·+xn un
ku x1, . . . , xn janë skalar në k. Prej nga,
L(x) =x1L(u1)+·· ·+xnL(un)
= x1(a1,1 v1 +·· ·a1,m vm
)+ x2
(a2,1 v1 +·· ·a2,m vm
)· · · · · · · · ·
+ xn(an,1 v1 +·· ·an,m vm
)=(a1,1x1 +a2,1x2 +·· ·an,1xn)v1
(a1,2x1 +a2,2x2 +·· ·an,2xn)v2
· · · · · · · · ·(a1,m x1 +a2,m x2 +·· ·an,m xn)vm
Kështu që, kordinatat e vektorëve L(x) në varësi të bazës B2 të V-së janë
L(x) =
a1,1 x1 +a2,1x2 +·· ·+an,1xn
a1,2 x1 +a2,2x2 +·· ·+an,2xn
· · · · · · · · ·· · · · · · · · ·
a1,m x1 +a2,m x2 +·· ·+an,m xn
=
a1,1 a2,1 · · · an,1
a1,2 a2,2 · · · an,2
· · · · · ·a1,m a2,m · · · an,m
·
x1
x2
··
xn
= At x = MB2B1
(L)x

2.6. MATRICAT E SHOQËRUARA ME FUNKSIONET LINEARE 79
Kështu, për çdo funksion linear L : U → V ekziston një matricë MB2B1
(L) në varësi të bazave B1 dheB2, e tillë që
L(x) = MB2B1
(L)x
Zakonisht MB2B1
(L) e shënojmë si më poshtë
MB2B1
(L) = [L(u1)B2 | · · · | L(un)B2
]ku çdo L(ui )B2 është vektori kolonë L(ui ) në varësi të bazës B2 të V-së.
Shembull 2.26. Le të jetë L :R2 →R3 funksion linear i dhënë nga
L(x, y) = (x − y,2x −3y, x −3y)
Gjej matricën e shoqëruar me L në varësi të bazës standarte.
Zgjidhje: Baza standarte për R2 është
B1 = {i , j } = {(1,0), (0,1)}
Atëherë
L(i ) = (1,2,1)
L( j ) = (−1,−3,−3)
në varësi të bazës standarte të R3. Kështu që, matrica e shoqëruar e L :R2 →R3 është 1 -12 -31 -3
në varësi të bazës standarte të R2 dhe R3.
Shembull 2.27. Le të jetë
T :R2 →R2
(x, y) → (x cosθ− y sinθ, x sinθ+ y cosθ)
Lexuesi duhet të vërtetojë se T është një funksion linear. Eshtë një ushtrim në trigonometri të vërtetosh seky funksion rrotullon çdo pikë të R2 me një kënd θ. Kush është matrica e shoqëruar me T në varësi të bazësstandarte të R2?
Zgjidhje: Kemi
T(1,0) = (cosθ, sinθ),
T(0,1) = (−sinθ,cosθ)
Atëherë, matrica e shoqëruar është:
A := M( f ) =[
cosθ −sinθsinθ cosθ
]

80 T. Shaska
Kemi parë në ushtrimet e Chapter 1 se
An =[
cosnθ −sinnθsinnθ cosnθ
]Dhe në të vërtetë ky rezultat mund të pritet meqënëse duke u rrotulluar n-herë nga θ është njëlloj si të tërrotullohen me këndin nθ.
Tani do shikojmë një shembull ku asnjë nga bazat B1, B2 nuk është bazë standarte.
Shembull 2.28. Le të jetë
T :R3 −→R4
(x, y, z) −→ (x + y, y + z, x − y, y − z)
një funksion linear. Fiksojmë bazat
B1 = {(1,1,1), (2,1,0), (3,1,1)} = {u1,u2,u3},
B2 = {(1,0,0,1), (1,2,0,0), (2,3,2,1), (0,0,0,2)} = {v1,v2,v3,v4}
e R3 dhe R4 respektivisht. Gjejmë matricën e shoqëruar të L-së në varësi të B1 dhe B2.
Zgjidhje: Në fillim e gjejmë si më poshtë
T(u1) = (2,2,0,0) =: w1
T(u2) = (3,1,1,1) =: w2
T(u3) = (4,2,2,0) =: w3
Tani na duhet të shprehim vektorët w1,w2,w3 në varësi të bazës B2. Secila prej tyre duhet të shprehen si
r1v1 + r2v2 + r3v3 + r4v4 = (r1 + r2 +2r3,2r2 +3r3,2r3,2r4)
Kështu që kemi (në varësi të B2)
w1 = (1,1,0,0)
w2 = (9
4,−1
4,
1
2,
1
2)
w3 = (3
2,−1
2,1,0)
Matrica është
MB2B1
=
1 94
32
1 − 14 − 1
2
0 − 12 1
0 12 0

2.6. MATRICAT E SHOQËRUARA ME FUNKSIONET LINEARE 81
Teorema në vazhdim e bën më të qartë lidhjen midis matricave dhe funksionëve linear. Le të jenë U dheV hapësira vektoriale mbi k dhe B1, B2 bazat e tyre respektive. Që këtej e tutje për një funksion linear
f : U → V do të përdorim M( f ) në vend të MB2B1
( f ).
Teorema 2.16. Le të jenë U dhe V hapësira vektoriale mbi k dhe B1, B2 bazat e tyre respektive. Për çdof , g ∈L (U,V) pikat e mëposhtme janë të vërteta:
i) M( f + g ) = M( f )+M(g )
ii) M(r f ) = r M( f ), për çdo skalar r ∈ k.
iii) M( f ◦ g ) = M( f ) ·M(g )
Vërtetim: Vërtetimi është lënë si ushtrim. Teorema e mëposhtme vërteton jo vetëm se çdo funksionilinear mund ti shoqërojmë një matricë, por edhe e anasjellta është e vërtetë.
Teorema 2.17. Le të jenë U dhe V hapësira vektoriale mbi k me dimensione n dhe m respectivisht. Fiksobazat B1, B2 të U-së dhe V-së. Për më tepër, le të jetë L (U,V) hapësira e funksionëve linear f : U → V.Atëherë
Φ : L (U,V) −→ Matm×n(k)
f −→ M( f )(2.14)
është një izomorfizëm.
Vërtetim: Teorema e mëparshme vërteton se Φ është një funksion linear. Së pari, vërtetojmë se φ ështëinjektiv. Le të jenë f , g ∈L (U,V), të tillë qëΦ( f ) =Φ(g ). Kështu që, M( f ) = M(g ). Pra, për çdo x ∈ U kemi
M( f )x = M(g )x
e cila ndomethënë se f (x) = g (x). Pra, f = g dhe Φ është injektiv.Le të jetë A ∈ Matm×n(K). Përcaktojmë funskionin
LA : U −→ V
x −→ Ax(2.15)
Atëherë, LA ∈L (U,V). Kështu që, Φ është surjektiv.
Ushtrime:
1. Kontrollo nëse funksioni T :R3 −→R4, i tillë që
T(x, y, z) = (x +2, y −x, x + y)
është linear. Në qoftë se është linear atëherë gjej matricën e tij shoqëruese.

82 T. Shaska
2. Gjej matricën shoqëruese në varësi të bazave standarte të funksionit T :R3 −→R3, i tillë që
T(x, y, z) = (x, y, x + y + z)
3. Gjej matricën shoqëruese në varësi të bazave standarte të funksionit T :R3 −→R3 i tillë që
T(x, y, z) = (x + y,3y,7x +2y +4z)
4. Gjej matricën shoqëruese në varësi të bazave standarte të funksionit T :R5 −→R5 i tillë që
T(x1, . . . , x5) = (x1, x2, x3, x4, x5)
5. Le të jetë L 1(R) hapësira vektoriale e funksioneve të diferencueshëm nga R në R. Le të jetë
V := Span (sin x,cos x)
dhe D : L 1(R) → L 1(R) funksioni i diferencueshëm. Ngushtimi i këtij funksioni në V na jep njëfunksion linear DV : V → V. Gjej matricën shoqëruese të DV për B1 =B2 = {sin x,cos x}.
6. Le të jetë Pn hapësira vektoriale mbi R e polinomëve me koefiçientë në R dhe gradë ≤ n. Derivimii polinomeve është një funksion linear në këtë hapësirë. Gjej maricën shoqëruese për
B1 =B2 = {1, x, . . . , xn}.
7. Le të jenë u = (1,2) ∈R2 dhe T :R2 →R2 të tillë që T(x) = u+x. Gjej matricën shoqëruese të T-së nëvarësi të bazave standarte të R2.
8. Le të jetë T : R2 → R2 transformimi i cili rrotullon çdo pikë me kënd Θ kundër lëvizjes sé akrepavetë orës. Gjej matricën shoqëruese në varësi të bazave standarte të funksionit.
9. Le të jetë T : R2 → R2 transformimi i planit i cili çon çdo pikë në pikën e tij simetrike në lidhje meboshtin e x-ve(dmth, T(x, y) = T(x,−y)). Gjej matricën shoqëruese të T-së në varësi të bazave stan-darte të funksionit.
10. Gjej matricën standarte të refleksionit të planitt x y në lidhje me drejtëzën y = x +2.
2.7 Ndryshimi i bazave
Ndonjëherë na duhet të punojmë me dy baza të ndryshme për të njëjtën hapësirë vektoriale. Disku-timi i mësipërm na jep një rrugë për të gjetur kordinatat e vektorit në varësi të një bazë të dhënë.
Le të jetë V një hapësirë vektoriale dhe B,B′ dy baza të V-së të dhëna nga
B= {b1, . . . ,bn}, B′ = {b′1, . . . ,b′
n}

2.7. NDRYSHIMI I BAZAVE 83
dhe T : V → V funksion linear, i tillë që
T : V −→ V
bi −→ b′i
(2.16)
Matricën shoqéruese të T e shënojmë me MB′B dhe e quajmë matrica e transformimit e B-së në B′.
Atëherë MB′B është e dhënë nga
MB′B = [T(b1) | · · · · · · |T(bn) ] = [b′
1 | · · · · · · |b′n ]
ku b′i -të janë dhënë në varësi të bazës B′. Marrim algoritmin për të llogaritur matricën e transformimit.
Algorithm 5. Input: Një hapësirë vektoriale V dhe dy baza B1 = {u1, · · ·un} dhe B2 = {v1, · · ·vn} të V-së
Output: Matrica e transformimit MB2B1
, e tillë që
MB2B1
· vB1 = vB2
i) Krijojmë matricënA = [v1 | · · · | vn | u1 | . . . | un ]
ii) Transformojmë A me anë të veprimeve me radhët të matricës[I | MB2
B1
]Shembull 2.29. Le të jetë V =R2 dhe
B1 = {(1,1), (1,0)}, B2 = {(1,2), (−1,1)}
dy baza të V-së. Gjej matricë e transformimit MB2B1
. Janë dhënë vektorët u,v me kordinata
u = (3,4), dhe v = (−2,3)
në varësi të bazës B1, gjej kordinatat e tyre në varësi të B2.
Zgjidhje: Së pari krijojmë matricën
A =[
1 -1 1 12 1 1 0
]Duke kryer veprime me rreshtat e transformojmë në 1 0 2
313
0 1 - 13 - 2
3
Atëherë,
MB2B1
= 1
3·[
2 1-1 -2
]ku
uB2 = MB2B1
·[
34
]= 1
3
[10
-11
]dhe vB2 = MB2
B1·[
-23
]=−1
3
[14
].

84 T. Shaska
Shembull 2.30. Le të jetë u ∈ R3 me kordinata në bazën standarte u = (1,2,3). Gjej kordinatat e u-së nëvarësi të bazës B′ = {(1,1,1), (2,0,1), (3,1,1)}.
Zgjidhje: Së pari krijojmë matricën
A = 1 2 3 1 0 0
1 0 1 0 1 01 1 1 0 0 1
Duke kryer veprime me rreshtat e transformojmë në 1 0 0 - 1
212 1
0 1 0 0 -1 10 0 1 1
212 -1
Atëherë
M := MB2B1
=
− 1
212 1
0 −1 1
12
12 −1
dhe
M ·u =
72
1
− 32
Le të jetë V një hapësirë vektoriale me dimension të fundëm dhe B e B′ baza të V-së. Le të jetëL : V → V një transformim linear dhe MB dhe MB′ matrica shoqëruese për L në varësi të bazave B dheB′ respektivisht. Kemi teoremën e mëposhtme:
Teorema 2.18. Le të jetë M := MB′B matrica e transformimit nga B në B′. Atëherë,
MB′ (L) = M−1 ·MB(L) ·M
Vërtetim: Ushtrim.
Shembull 2.31. Gjej matricën shoqëruese për funksionin linear
T :R3 −→R4
të tillë qëT(x, y, z) = (x − y +2z, y + z,3x −2y − z,7y + z)
dhe gjej një bazë për ker (T).
Zgjidhje: Kemi
T(1,0,0) = (1,0,3,0)
T(0,1,0) = (−1,1,−2,7)
T(0,0,1) = (2,1,−1,1)
(2.17)

2.7. NDRYSHIMI I BAZAVE 85
Matrica shoqëruese është:
M(T) :=
1 -1 20 1 13 -2 -10 7 1
dhe forma e reduktuar row-eçelon e tij është:
H(T) :=
1 0 00 1 00 0 10 0 0
Sistemi
H(T)x = 0
ka si zgjidhje vetëm x = 0. Pra, ker (T) = {0}.
Ushtrime:
1. Le të jetë B1 = {1, x, x2, x3} një bazë për P3. Vërteto se
B2 = {2x −1, x2 −x +1, x3 −x, x3 −x,−2}
është gjithashtu një bazë. Gjej matricën shoqëruese nga B1 në B2.
2. Le të jetë V := Span (ex ,e−x ). Gjej kordinatat e
f (x) = sinh x, g (x) = cosh x
në lidhje me B= {ex ,e−x }.
3. Le të jetë V := Span (ex , xex ). Gjej matricën transformuese nga B1 në B2, ku
B1 := {ex , xex } dhe B2 = {2xex ,4ex }.
4. Le të jetë B1 := {i , j } baza standarte e R2 dhe u,v vektorët e përftuar duke rrotulluar në drejtim tëkundërt të akrepave të sahatit, me kënd θ, vektorët i , j respektivisht. Eshtë e qartëB2 := {u,v} është
një bazë për R2. Gjej MB2B1
.
86 T. Shaska
2.8 Ushtrime përsëritje
1. Përkufizo hapësirën vektoriale mbi një fushë k, nënhapësirën, hapësirën nul, shumën direkte,prodhimin direkt, funksionin linear, kernel dhe image e një funksioni linear.
2. Një matricë katrore quhet trekëndore e sipërme në qoftë se të gjithë elementët nën diagonalenkryesore janë zero. Le të jetë V = Matn×n(R) dhe W bashkësia e të gjitha matricave trekëndore tësipërme të V-së. A është W nënhapësirë e V-së? Justifiko përgjigjen.
3. Një matricë katrore quhet trekëndore e poshtme në qoftë se të gjithë elementët mbi diagonalenkryesore janë zero. Le të jetë V = Matn×n(R), W1 bashkësia e të gjitha matricave trekëndore tësipërme të V-së dhe W2 bashkësia e të gjitha matricave trekëndore të poshtme të V-së. Çfarë ështëprerja e W1 ∩W2?
4. Le të jetë A një matricë e anasjelltë n×n. Sa është rank (A), null (A)? Çfarë është forma e reduktuarrow-eçelon e A-së.
5. Gjej matricën shoqëruese për funksionin linear
T :R3 −→R4
i tillë qëT(x, y, z) = (x − y +2z, y + z,3x −2y − z,7y + z)
dhe gjej një bazë për ker (T).
6. Gjej matricën standarte të rrotullimit të planit x y ne drejtim të kundërt me akrepat e sahatit rrethorigjinës me kënd:
i) 45◦
ii) 60◦
iii) 15◦
7. Le të jetë B := {u,v,w} një bazë për R3 dhe A një matricë 3× 3, e cila ka të anasjelltë. Vërteto se{Au, Av, Aw} është një bazë për R3.
8. Le të jetëAx = b
një sistem linear me n ekuacione dhe n të panjohura. Sa zgjidhje ka ky sistem në qoftë se rank (A) =n? Po në qoftë se rank (A) < n ? Shpjego.

2.8. USHTRIME PËRSËRITJE 87
9. Gjej një bazë për nënhapësirën W = Span(w1,w2,w3,w4) në R3, ku w1, . . . ,w4 janë dhënë si mëposhtë:
w1 = (1,0,3,1)
w2 = (−1,3,1,5)
w3 = (1,4,2,1)
w4 = (3,0,1,5)
(2.18)
10. Le të jenë V = R2 dhe W nënhapësira të gjeneruara nga w = (2,3). Le të jetë U nënhapësira egjeneruar nga u = (−1,1). Vërteto se V është shuma direkte e W-së dhe U-së.
11. Kontrollo nëse funksioni T :R3 −→R3 i tillë që
T(x, y, z) = (x −2, y −x, x + y)
është linear. Në qoftë se është linear atëherë gjej matricën e tij shoqëruese.
12. Le të jetë T :R2 →R2 rrotullimi kundër akrepave të sahatit me kënd θ= π3 . Gjej
T(1,0), T(1,1), T(−1,1).
13. Gjej rangun, nulitetin dhe bazat për hapësirën kolonë, hapësirën rresht dhe hapësirën nul të ma-tricës:
1 2 3 1-2 1 1 2-1 3 4 3-1 3 4 3
14. Le të jetë B := {u,v,w} e tillë që
u = (1,2,3), v = (1,−1,1), w = (1,3,1)
A është B një bazë për R3? Justifiko përgjigjen.
15. Gjej matricën shoqëruese për funksionin linear
T :R4 −→R4
i tillë qëT(x, y, z, w) = (x − y + z,2x −2y +2z, x + y − z −b,2x −w)
dhe gjej një bazë për ker (T).
88 T. Shaska
16. Le të jetë V = Matn(R). Gjej matricat që janë ndërrimtare me çdo element të V-së.
17. Le të jetë GL2(k) bashkësia e matricave në Mat2(k) të cilat kanë të anasjelltë. A është GL2(k) njënënhapësirë e Mat2(k)? Justifiko përgjigjen.

Kapitulli 3
Përcaktorët, eigenvlerat, eigenvektorët
Teoria e përcaktorëve u zhvillua në shekullin e 17-të dhe 18-të. Fillimisht ishte Cramer i cili hodhibazat e para në teorinë e përcaktorëve dhe më vonë e vazhduan Bezout, Vandermonde, Laplace, Cauchy,etj. Me zhvillimin e algjebrës moderne dhe koncepteve të reja, si psh format multilineare, grupet epërkëmbimeve, etj, koncepti i përcaktorit u bë më i plotë. Dhe ne vazhdojmë me këtë koncept në al-gjebrën e lartë edhe në ditët tona. Kjo çështje është trajtuar në Apendiks B.
3.1 Përcaktorët
Në këtë seksion do të përkufizojmë përcaktorin e matricës. Rruga më e mirë për këtë është me for-mat e alternuara dhe përkëmbimet, por kjo mund të jetë disi e vështirë në këtë nivel. Në vend të saj nepërdorim një këndvështrim më kompjutacional.
Përkufizim 3.1. Le të jetë A = [ai j ] një matricë n×n. Për çdo (i , j ) le të jetë Ai j një matricë (n−1)×(n−1)e përfituar duke hequr rreshtin e i -të dhe kolonën e j -të. Atëherë, Ai j quhet një minor i A-së dhe
ai j = (−1)i+ j det (Ai j ) (3.1)
quhet (i, j)–kofaktor i A-së.
Përkufizim 3.2. Le të jetë A = [ai j ] një matricë n ×n. Atëherë për një i = 1, . . .n të fiksuar përcaktori iA-së është i përcaktuar si më poshtë:
det (A) :=n∑
j=1(−1)i+ j ·ai , j ·det (Ai j ) =
n∑j=1
ai , j · ai , j
dhe është i pavarur nga zgjedhja e i -së.
Përcaktori i matricës A
89

90 T. Shaska
A :=
a1,1 a1,2 a1,3 . . . a1,n
a2,1 a2,2 a2,3 . . . a2,n
a3,1 a3,2 a3,3 . . . a3,n
· ·· ·· ·
am,1 am,2 am,3 . . . am,n
jepet si më poshtë
det (A) =
a1,1 a1,2 a1,3 . . . a1,n
a2,1 a2,2 a2,3 . . . a2,n
a3,1 a3,2 a3,3 . . . a3,n
· ·· ·· ·
am,1 am,2 am,3 . . . am,n
Shembull 3.1. Le të jetë A një matricë 2×2
A =[
a bc d
]Atëherë përcaktori i saj është
det (A) = a bc d
= ad −bc.
Shembull 3.2. Le të jetë A një matricë 3×3
A =a1,1 a1,2 a1,3
a2,1 a2,2 a2,3
a3,1 a3,2 a3,3
Atëherë përcaktori i saj është
det (A) =a1,1a2,2 a2,3
a3,2 a3,3−a1,2
a2,1 a2,3
a3,1 a3,3+a1,3
a2,1 a2,2
a3,1 a3,2
= a1,1a2,2a3,3 +a1,2a2,3a3,1 +a2,1a3,2a1,3 −a3,1a2,2a1,3 −a3,2a2,3a1,1 −a2,1a1,2a3,3
Në shumë libra të algjebrës lineare elementare teknika e mëposhtme jepet për të kujtuar se si të gje-jmë përcaktorin e një matrice 3 me 3.
Përkufizim 3.3. Përkufizimi i përcaktorit si më sipër quhet shtjellim me minorë përgjatë rreshtave tëi -të.

3.1. PËRCAKTORËT 91
Një interpretim vizual i përcaktorit jepet si më poshtë. Shigjetat e drejtuara për poshtë përfaqësojnëprodhime me koefiçientë 1 dhe shigjetat e drejtuara lartë përfaqësojnë prodhime me koefiçientë -1.
det (M) =∣∣∣∣∣∣a11 a12 a13
a21 a22 a23
a31 a32 a33
∣∣∣∣∣∣= (
a11a22a33 +a21a32a13 +a31a12a33)− (
a13a22a31 +a23a32a11 +a33a12a31)
a11 a12 a13
a21 a22 a23
a31 a32 a33
a11 a12 a13
a21 a22 a13
+
+
+
−
−
−
Së pari, na duhet të tregojmë që zgjedhja e rreshtave nuk e ndryshon përcaktorin. Ne nuk do ta bëjmëvërtetimin e teoremës, pasi për një vërtetim të plotë duhet një përkufizim shumë i saktë i përcaktorit,sikurse është dhënë në Apendiks B.
Teorema 3.1. Shtjellimi përgjatë çdo rreshti apo kolone nuk e ndyshon përcaktorin.
Teorema e mësipërme na lejon të zgjedhim rreshtin apo kolonën me sa më shumë zero gjatë llogarit-jes së përcaktorit të matricës.
Shembull 3.3. Llogarit përcaktorin e matricës
A =
1 2 0 4 00 2 0 0 12 1 2 1 21 1 2 4 50 2 1 2 0
Zgjidhje: Meqënëse rreshti i dytë ka tre zero, ne bëjmë llogaritjen përgjatë këtij rreshti. Pra kemi
det (A) = 2 ·1 0 4 02 2 1 21 2 4 50 1 2 0
−1 ·1 2 0 42 1 2 11 1 2 40 2 1 2
Le të jetë
A1 :=
1 0 4 02 2 1 21 2 4 50 1 2 0
, A2 =
1 2 0 42 1 2 11 1 2 40 2 1 2

92 T. Shaska
Atëherë
det (A1) = 1 ·2 1 22 4 51 2 0
+4 ·2 2 21 2 50 1 0
= (5+8−8−20)+4(2−2 ·5) =−15−32 =−47
(3.2)
det (A2) =1 2 11 2 42 1 2
−2 ·2 2 11 2 40 1 2
−4 ·2 1 21 1 20 2 1
= (4+16+1−4−4−4)−2(8+1−4−8)−4(2+4−8−1)
= 9−2 · (−3)−4 · (−3) = 27
Kështu që,det (A) = 2 · (−47)−27 =−121
Lema 3.1. det (A) = det (AT)
Vërtetim: Le të jetë A = [ai j ] një matricë e dhënë. E vërtetojmë Lemën me anë të induksionit. Për n = 1vërtetimi është trivial. Supozojmë se lema është e vërtetë për n < r . Ne duam të tregojmë se është evërtetë për n = r . Përcaktori i A-së është
det (A) = a11|A11|−a12|A12|+ · · ·+ (−1)r+1a1r |A1r |Përkufizojmë me B := At . Atëherë
det (B) = b11|B11|−b21|B21|+ · · ·+ (−1)r+1br 1|B1r |.Gjithsesi, a1 j = b j 1 dhe B j 1 = At
1 j . Nga hipoteza e induksionit kemi |A1 j | = |B j 1|. Kështu që, det (A) =det (B) = det (At ).
Vërejtje. Përcaktori i një matrice trekëndore është prodhimi i elementëve të diagonales së tij.
Tregojmë se kjo është e vërtetë me anë të një matrice trekëndore të sipërme.
Shembull 3.4. Le të jetë A një matricë trekëndore
A :=
a1,1 a1,2 a1,3 . . . a1,n
0 a2,2 a2,3 . . . a2,n
0 0 a3,3 . . . a3,n
· ·· ·· ·
0 0 0 . . . am,n
Zgjidhje: Gjejmë përcaktorin duke shtjelluar përgjatë kolonës së parë. Eshtë e qartë se
det (A) =n∏
i=1ai ,i .

3.1. PËRCAKTORËT 93
Shohim disa veti të përcaktorëve.
Lema 3.2. Le të jetë A një matricë n ×n. Veprimet me rreshtat kanë efektet e mëposhtme në përcaktorë:
i) Në qoftë se kemi kryer veprimin Ri ←→ R j në një matricë A, atëherë përcaktori i matricës sëpërfituar A′ është
det (A′) =−det (A)
ii) Në qoftë se dy rreshta të A-së janë të njëjtë, atëherë
det (A) = 0
iii) Në qoftë se kryejmë veprimin Ri → r Ri , atëherë përcaktori i matricës së përfituar A′ është
det (A′) = r ·det (A)
iv) Veprimi R j → r Ri +R j nuk e ndryshon përcaktorin.
Vërtetim: i) Procedojmë me anë të induksionit. Vërtetimi për n = 2 është trivial. Supozojmë se vetiaështë e vërtetë për të gjitha matricat me dimension më të vogël se n. Le të jetë B një matricë e përfituarpasi kemi bërë veprimin Ri ←→ R j në A. Llogarit përcaktorin duke zhvilluar përgjatë rreshtit të s-të, kus 6= i dhe s 6= j . Atëherë
det (A) = as1|As1|−as2|As2|+ · · ·+ (−1)s+n asn |Asn |.
Për çdo 1 ≤ r ≤ n kemi(−1)s+r |Asr | = −(−1)s+r |Br s |.
Nga hipoteza e induksionit, |Br s | = −|Asr |. Pra, det (B) =−det (A).ii) Ky është rrjedhim i menjëherëshëm i pikës i).iii) Rrjedhim i menjëherëshëm i përkufizimit.iv) Le të jetë B matrica e përfituar pasi kemi kryer veprimin R j → r Ri +R j në A. Atëherë,
det (B) = b j 1|B j 1|+ · · ·+ (−1) j+nb j n |B j n |= (r ai 1 +a j 1)|B j 1|+ · · ·+ (−1) j+n(r ai n +a j n)|B j n |=
(r ai 1|B j 1|+ · · ·+ (−1) j+nr ai n |B j n |
)+
(a j 1|B j 1|+ · · ·+ (−1) j+n a j n |B j n |
)= r det (C)+det (A)
ku C është përfituar duke i ndëruar vendet rreshtave të A-së. Pra, det (C) = 0 dhe det (B) = det (A).
Teorema 3.2. Një matricë A ka të anasjelltë atëherë dhe vetëm atëherë kur det (A) 6= 0.
Vërtetim: Le të jetë A një matricë e dhënë. Llogarisim formën row eçelon të A-së. Atëherë
det (A) = r ·det (H)
për disa konstante r 6= 0. Matrica A ka të anasjelltë atëherë dhe vetëm atëherë kur H ka pivotë në çdorresht. Meqënëse H është trekëndore, atëherë përcaktori i saj është prodhimi i këtyre pivotëve. Pra, A ka

94 T. Shaska
të anasjelltë atëherë dhe vetëm atëherë kur det (H) 6= 0. Si rrjedhim, A ka të anasjelltë atëherë dhe vetëmatëherë kur det (A) 6= 0.
Lema 3.3. Le të jetë A,B ∈ Matn×n(k). Në qoftë se det (A) = 0 atëherë det (AB) = 0.
Vërtetim: Ushtrim për lexuesin.
Teorema 3.3. Le të jetë A,B ∈ Matn×n(k). Atëherë
det (AB) = det (A)det (B).
Vërtetim: Së pari supozojmë se A është diagonal. Atëherë, për të përfituar matricën AB, çdo rresht i B-sëshumëzohet me Ai ,i . Pra,
det (AB) = (a11 · · ·ann) ·det (B) = det (A) ·det (B).
Supozojmë se A ka të anasjelltë (në rast të kundërt teorema është e vërtetë si rrjedhim i Lemës së mësipërme). Atëherë, A mund të kthehet në formën diagonale D duke kryer veprime me rreshtat (shumëz-imi me konstante nuk është i lejuar). Kështu që, D = EA për një matricë elementare E ku E korespondinme kembim radhësh ose mbledhje radhësh. Pra, det (A) = (−1)r ·det (D), për disa r . Atëherë,
E(AB) = (EA)B = DB.
Pra, kemi
det (AB) = (−1)r ·det (DB) = (−1)r ·det (D) ·det (B) = det (A) ·det (B).
Kjo plotëson vërtetimin.
Shembull 3.5. Gjej përcaktorin e matricës AB kur
A :=
1 0 0 02 2 0 09 2 4 0
12 10 2 5
, B =
3 0 0 02 1 0 0
21 -7 2 013 2 31 2
Zgjidhje: Meqënëse të dyja janë matrica trekëndore dhe det (AB) = det (A) ·det (B) kemi
det (AB) = (1 ·2 ·4 ·5) · (3 ·1 ·2 ·2) = 480
3.1.1 Llogaritja e përcaktorëve
Të llogaritësh një përcaktor sikurse e kemi përshkruar më sipër është një proçes i gjatë. Gjithësesi nemund të bëjmë veprime me rreshtat për ta llogaritur përcaktorin më shpejt.

3.1. PËRCAKTORËT 95
Algorithm 6. Input: Një matricë katrore AOutput: Përcaktori i A-së
1) Redukto A-në në formën row-eçelon duke përdorur vetëm mbledhje dhe ndërrim të rreshtave.2) Në qoftë se gjatë kësaj proçedure të gjithë elementët e një prej rreshtave bëhen zero atëherë
det (A) = 0,
në të kundërt
det (A) = (−1)r ·n∏
i=1pi
ku pi -të janë pivotët dhe r është i barabartë me sa herë i kemi ndëruar vendet rreshtave.
Ushtrime:
1. Le të jetë A një matricë (n ×n) e cila ka të anasjelltë. Vërteto se
det (A−1) = 1
det (A)
2. Gjej përcaktorin e
A = 1 1 1
1 1 12 0 1
, B = 2 1 3
2 -1 04 0 3
3. Gjej përcaktorin e
A = 1 0 1
0 1 02 0 1
, B = 2 1 3
2 -1 0-1 0 5
4. Gjej përcaktorin e
A =
5 -1 0 21 2 1 03 1 -2 40 4 -1 2
, B =
5 2 0 23 2 1 03 1 -2 42 4 -1 2
dhe përdor rezultatin për të gjetur det (A−1) dhe det (B−1).
5. Le të jetë A një matricë e tillë që det (A) 6= 0. A ka ndonjë zgjidhje sistemi Ax = b?
6. Le të jetë A e dhënë si më poshtë
A =[
a bc d
]Cili është kushti për a,b,c,d e tilla që A të ketë të anasjelltë? Gjej të anasjelltin.

96 T. Shaska
7. Le të jetë C një matricë e cila ka të anasjelltë. Vërteto se
det (A) = det (C−1AC).
8. Përcaktori i një matrice A n ×n është det (A) = 3. Gjej det (2A), det (−A), dhe det (A3).
9. Le të jetë A një matricë n ×n. Në qoftë se çdo rresht i A-së shumëzoeht me 0 vërteto se det (A) = 0.
10. Le të jetë A një matricë n×n. Në qoftë se çdo rresht i A-së shumëzohet me 1 vërteto se det (A−I) = 0.A sjell kjo si rrjedhim se det (A) = 0 ?
3.2 Rregulli i Kramerit dhe matricat axhoint
Deri tani kemi zgjidhur sisteme lineare duke përdorur metodën e Gausit. Në këtë seksion do tëshohim një metodë tjetër, e cila do të na japë një formulë për zgjidhjen e sistemeve lineare.
Le të jetë një sistem linearA ·x = b
i dhënë ku
A = [ai , j ] =
a1,1 a1,2 a1,3 . . . a1,n
a2,1 a2,2 a2,3 . . . a2,n
a3,1 a3,2 a3,3 . . . a3,n
···
am,1 am,2 am,3 . . . am,n
, x =
x1
x2
x3
xm
, b =
b1
b2
b3
bm
.
Për çdo k = 1, . . . ,n, përkufizojmë matricën Bk të jetë matrica e përfituar nga zëvendësimi i kolonëssë k-të të A-së me vektorin b si më poshtë:
Bk =
a1,1 a1,2 a1,3 . . . b1 . . . a1,n
a2,1 a2,2 a2,3 . . . b2 . . . a2,n
a3,1 a3,2 a3,3 . . . b3 . . . a3,n
· . . . . . . .· . . . . . . .· . . . bi . . .· . . . . . . .· . . . . . . .
am,1 am,2 am,3 . . . bn . . . am,n
Teorema 3.4. (Kramer) Në qoftë se A është matricë e cila ka të anasjelltë, atëherë sistemi linear
Ax = b
ka një zgjidhje të vetme të dhënë nga
xk = det (Bk )
det (A), për k = 1, . . . ,n.

3.2. RREGULLI I KRAMERIT DHE MATRICAT AXHOINT 97
Vërtetim: Zgjidhja është x = A−1b. Shtjellojmë det Bk në kofaktorët e kolonës së k-të. Kemi
det Bk = b1A1k +·· ·+bn Ank .
Duke shumëzuar me 1det A
, ky është komponenti i k-të i vektorit x.
Shembull 3.6. Zgjidh sistemin e mëposhtëm me anë të rregullit të Kramerit{2x +3y = 5
5x − y = 7
Zgjidhje: Atëherë
A =[
2 35 -1
], B1 =
[5 37 -1
], B2 =
[2 55 7
]dhe
det (A) =−17, det (B1) =−26, det (B2) =−11
Pra,
x1 = 26
17, x2 = 11
17
Tani mund të ilustrojmë sistemin linear me pesë ekuacione dhe pesë të panjohura.
Shembull 3.7. Zgjidh sistemin linear Ax = b, ku A është si në Shembullin 3.3 dhe
b =
100
-10
Zgjidhje: Sikurse në Shembullin (3.3) përcaktori i A-së është det (A) =−121. Llogarisim
det (B1) =−61, det (B2) =−14, det (B3) = 44, det (B4) =−8, det (B5) = 28
Atëherë, zgjidhja e sistemit është
x =
61121
14121
− 411
8121
− 28121

98 T. Shaska
Një sistem linearAx = b
i tillë që b = 0 quhet sistem homogjen.
Teorema 3.5. Një sistem homogjen ka një zgjidhje jozero atëherë dhe vetëm atëherë kur det (A) = 0.
Vërtetim: Ushtrim.
3.2.1 Axhoint-ët e matricave
Ekzistenca e të anasjelltit të një matrice varet nga fakti nëse përcaktori i matricës është 0. Natyrishtne duam të gjejmë një formulë për gjetjen e të anasjelltin të një matrice në lidhje me përcaktorin.
Përkufizim 3.4. Le të jetë A = [ai , j ] një matricë n×n, me elementë ngaC. Për çdo element ai , j , kofaktorikorespondues është i përkufizuar si
ci , j = (−1)i+ j det (Ai j )
shih (3.1). Krijojmë matricën C = [ci , j ]. Le të jetë
C := [ ci , j ],
ku ci , j është i konjuguari kompleks i ci , j . Matrica
adj (A) := (C
)t
quhet axhoint e A-së.
Shembull 3.8. Gjej axhointin e matricës:
A = i+1 2 i-1
0 2i 0i 1 -1
Zgjidhje: Atëherë
C = -2i 0 2
-1-i 0 1-i4 0 -2+2i
Pra,
C = 2i 0 2
-1+i 0 1+i4 0 -2-2i
dhe
adj (A) = -2i -1-i 4
0 0 02 1-i -2+2i

3.2. RREGULLI I KRAMERIT DHE MATRICAT AXHOINT 99
Vërejtje. Kini parasysh se në qoftë se matrica ka elementë nëR, atëherë nuk është e nevojshme të marrimtë konjuguarit e ci , j meqënëse i konjuguari i një numri realë është po ai numër. Kjo është arsyeja psenë shumë libra të cilët trajtojnë vetëm matrica me elementë nga R përkufizimi i axhoint nuk përmendmarrjen e të konjuguarëve.
Shembull 3.9. Le të jetë A matrica e mëposhtme.
A :=
1 2 0 -10 2 0 02 1 -1 11 1 2 -1
Zgjidhje: Atëherë, axhointi saj është
adj (A) =
-2 5 -4 -20 -6 0 06 -3 0 -6
10 -7 -4 -2
Teorema 3.6. Le të jetë A një matricë e cila ka të anasjelltë dhe adj (A) axhoint i saj. Atëherë
A · adj (A) = adj (A) ·A = det (A) · In
Vërtetim: Ushtrim.Nga teorema e mësipërme arrijmë në përfundimin se për një matricë të dhënë A e tillë që det (A) 6= 0
kemi
A−1 = 1
det (A)adj (A)
Atëherë e anasjellta e matricës A jepet si më poshtë
A−1 = 1
det (A)adj (A) =
c11|A|
c21|A| · · · cn1
|A|c12|A|
c22|A| · · · cn2
|A|...
.... . .
...
c1n|A|
c2n|A| · · · cnn
|A|
Shembull 3.10. Gjej axhointin e A-së
A = 1 2 3
4 5 67 8 9
.
Zgjidhje: Axhointi është
adj (A) = -3 6 -3
6 -12 6-3 6 -3
Vini re se det (A) = 0, pra kjo matricë nuk ka të anasjelltë.

100 T. Shaska
Ushtrime:
1. Le të jetë kurba
A+By +Cx +Dy2 +Ex y +x2 = 0
e dhënë e cila kalon nga pikat (x1, y1), . . . , (x5, y5). Përcakto A,B,C,D dhe E. Ky ishte problem i parëpër të cilin Kramer ishte i interesuar kur zbuloi këtë formula.
2. Duke përdorur rregullin e Kramerit zgjidh sistemin Ax = b,ku
A =
5 -1 0 21 2 1 03 1 -2 40 4 -1 2
, b =
5332
3. Gjej axhointin e
A = 1 0 1
0 1 02 0 1
, B = 2 1 3
2 -1 0-1 0 5
dhe përdore rezultatin për të gjetur A−1 dhe B−1.
4. Gjej axhointin e
A =
5 -1 0 21 2 1 03 1 -2 40 4 -1 2
, B =
5 2 0 23 2 1 03 1 -2 42 4 -1 2
dhe përdore rezultatin për të gjetur A−1 dhe B−1.
5. Përcakto në qoftë se matrica
A :=
1 0 0 -10 1 0 02 1 -1 11 0 2 -1
ka të anasjelltë.
6. Le të jenë f , g si më poshtë:
f (x) = al x l +·· ·+a0
g (x) = bm xm +·· ·+b0(3.3)

3.2. RREGULLI I KRAMERIT DHE MATRICAT AXHOINT 101
Matrica
Syl ( f , g , x) =
al bm
al−1 al bm−1 bm
al−2 al−1 . bm−2 bm−1 .. al−2 . . . . . .. . . . al . . . . bm
a1 . . . al−1 b0 . . . bm−1
a0 a1 . . al−2 b0 . . .a0 . . . . . .
. . . .. . .
a0 b0
(3.4)
quhet matrica Silvester e f (x) dhe g (x). Rezultanti i f (x) dhe g (x), e shënuar me Res( f , g , x),është
Res( f , g , x) := det (Syl ( f , g , x)).
Pohimi i mëposhtëm është një fakt elementar në algjerën e polinomeve:
Polinomët f (x) dhe g (x) kanë një faktor të përbashkët në k[x] atëherë dhe vetëm atëherë kur Res( f , g , x) =0.
Le të jetë
F(t ) = u(1+ t 2)− t 2
G(t ) = v(1+ t 2)− t 3(3.5)
Gjej Res(F,G, t ).
7. Le të jetë
f (x) = x5 −3x4 −2x3 +3x2 +7x +6
g (x) = x4 +x2 +1(3.6)
Gjej Res( f , g , x).
8. Le të jetëf (x) = an xn + . . . a1x +a0
dhe f ′(x) derivati i tij. Përkufizojmë dallorin ∆ f e f (x) në lidhje me x si më poshtë:
∆ f := (−1)n(n−1)
2
anRes( f , f ′, x).
Pohimi i mëposhtëm është një fakt elementar në algjerën e polinomeve:

102 T. Shaska
Polinomi f (x) ka rrënjë të dyfishta atëherë dhe vetëm atëherë kur ∆ f = 0.
A kaf (x) = 6x4 −23x3 −19x +4
ndonjë rrënjë të dyfishtë në C?
9. Gjej b-në e tillë qëf (x) = x4 −bx +1
ka një rrënjë të dyfishtë në C.
10. Gjej p-në e tillë qëf (x) = x3 −px +1
ka një rrënjë të dyfishtë në C.
3.3 Eigenvlerat, eigenvektorët dhe eigenhapësirat
Lexuesi, besoj se e ka vënë re se është shumë më e lehtë të punosh me matrica diagonale. Për shem-bull, në qoftë se A është diagonale atëherë det (A) është i lehtë për tu gjetur, një sistem linear Ax = b ështëi lehtë për tu zgjidhur dhe An është e lehtë për tu llogaritur. Si mund të "transformohet"një matricë nënjë matricë diagonale? Në këtë seksion do të studiojmë një nga konceptet më të rëndësishme të algje-brës lineare sikurse eigenvlerat, eigenvektorët dhe eigenhapësirat. Rëndësia e tyre do të jetë e qartë nëseksionin tjetër.
Përkufizim 3.5. Le të jetë A një matricë n×n. Një skalar jozeroλquhet një eigenvlerë në qoftë se ekzistonnjë vektor jozero v i tillë që
Av = λv
Vektori v quhet eigenvektori, i cili i korenspondon λ-së.
Pohim 3.1. Pikat e mëposhtme janë ekuivalente:1) λ është një eigenvlerë i A-së2) det (λI−A) = 0
Vërtetim: Për të llogaritur eigenvlerat dhe eigenvektorët e vëmë re se
Av = λv =⇒ (A−λI)v = 0
Pra, një eigenvlerë është një skalar λ për të cilin sistemi
(A−λI)x = 0
ka një zgjidhje jotriviale. Dimë se ky sistem ka një zgjidhje jotriviale atëherë dhe vetëm atëherë kur për-caktori i matricës koefiçient është zero. Kështu që, ne duam të gjejmë λ të tillë që
det (A−λI) = 0.

3.3. EIGENVLERAT, EIGENVEKTORËT DHE EIGENHAPËSIRAT 103
Le të jetë A = [ai , j ] një matricë e dhënë. Atëherë ekuacioni i mësipërm mund të shkruhet si
det (A−λI) =
a1,1 −λ a1,2 a1,3 . . . a1,n
a2,1 a2,2 −λ a2,3 . . . a2,n
a3,1 a3,2 a3,3 −λ . . . a3,n
· ·· ·· ·
an,1 an,2 an,3 . . . an,n −λKjo plotëson vërtetimin. Duke llogaritur këtë përcaktor marrim një polinom në varësitë λ-së, të gradës të paktën n. Ky quhet polinomi karakteristik i A-së, të cilin e shënojmë me char (A,λ).Të gjesh eigenvlwrat e A-së është njëlloj si të gjesh rrënjët e polinomit char (A,λ).
Rrjedhim 3.1. λ është një eigenvlerë atëherë dhe vetëm atëherë kur është një rrënjë e polinomit karakter-istik.
Vërejtje. Kujtoni nga algjebra se një polinom i gradës n mund të ketë të paktën n rrënjë. Kështu që njëmatricë n×n mund të ketë të paktën n eigenvlera. Shiko Apendiks B për më shumë detaje mbi polinomët.
Shumëfishmëria e një eigenvlere, si një rrënjë e polinomit karakteristik quhet shumëfishmëri al-gjebrike e një eigenvlere. Për një eigenvlerë të fiksuar λ, eigenvektorët korespondues janë dhënë ngazgjidhjet e sistemit
(A−λI)x = 0
Në të njëjtën mënyrë një hapësirë të tillë e kemi quajtur hapësirën nul të matricës koefiçient (A−λI).
Përkufizim 3.6. Në qoftë se λ është një eigenvlerë e A-së, bashkësia
EL := {v ∈ V | A v = λv}
quhet eigenhapësirë e A-së që i korenspondon λ-së. Dimensioni i eigenhapësirës quhet shumëfishmërigjeometrike e eigenvlerës λ.
Vërejtje. Mund të tregohet se shumëfishmëria gjeometrike është gjithmonë ≤ se shumëfishmëria algje-brike.
Të gjesh eigenvlerat kërkon të zgjidhësh ekuacionin e një polinomi, gjë e cila mund të jetë e vështirëpër polinome të gradave të larta. Pasi kemi gjetur eigenvlerat atëherë përdorim sistemin linear
(A−λI)x = 0
për të gjetur eigenvektorët. E paraqesim këtë në shembullin e mëposhtëm.
Shembull 3.11. Gjej polinomin karakteristik dhe eigenvlerat e matricës:
A =[
1 25 4
].
Zgjidhje: Polinomi karakteristik është
char (A,λ) = det (A−λI) = 1−λ 25 4−λ
= (1−λ)(4−λ)−5 ·2 = λ2 −5λ−6 = (λ+1)(λ−6)

104 T. Shaska
Eigenvlerat janë λ1 =−1 dhe λ2 = 6. Të dyja kanë shumëfishmëri algjebrike 1.Në qoftë se λ1 =−1 sistemi ndryshon: [ −1 2
5 2
]x = 0
dhe zgjidhja e tij është
v1 =[
-11
]Eigenhapësira e tij është
Eλ1 = ⟨v1⟩.
Ka dimension 1 dhe si rrjedhim shumëfishmëri gjeometrike e λ1 =−1 është gjithashtu 1.
Për λ2 = 6 sistemi bëhet: [-5 25 -2
]x = 0
dhe zgjidhja e tij është
v2 =[
152
]Eigenhapësira e tij është
Eλ2 = ⟨v2⟩.Kjo eigenhapësirë gjithashtu ka dimension 1 dhe si rrjedhim shumëfishmëri gjeometrike i λ2 = 6 ështëgjithashtu 1.
Shembull 3.12. Gjej eigenvlerat dhe shumëfishmëritë e tyre për matricën
A :=
1 0 2 12 1 0 -10 0 2 00 0 1 -2
Zgjidhje: Polinomi karakteristik është
char (A, x) = (x −1)2 (x −2)(x +2)
Kështu që janë tre eigenvlera, λ1 = 1, λ2 = −2, λ3 = 2. Eigenvlera λ1 = 1 ka shumëfishmëri algjebrike 2,ndërsa të tjerët kanë shumëfishmëri algjebrike 1.
Për të gjetur shumëfishmëritë gjeometrike për λ1,λ2,λ3 duhet të gjejmë eigenvektorët korespondues.Duke zgjidhur sistemin korespondues kemi
v1 =
0100
, v2 =
1
- 53
0-3
, v3 =
9
1741
Kështu që shumëfishmëritë gjeometrike për λ1,λ2,λ3 janë respektivisht 1, 1, 1.

3.3. EIGENVLERAT, EIGENVEKTORËT DHE EIGENHAPËSIRAT 105
Më poshtë do të shohim një shembull kur shumëfishmëritë algjebrike dhe gjeometrike janë të njëjtëpër çdo eigenvlerë.
Shembull 3.13. Gjej eigenvlerat dhe shumëfishmëritë e tyre për matricën
A :=
1 0 0 10 1 0 21 -1 2 30 0 0 -2
Zgjidhje: Polynomi karakteristik është
char (A, x) = (x −1)2 (x −2)(x +2)
Kështu që janë tre eigenvlera, λ1 = 1, λ2 =−2, λ3 = 2. Eigenvlera λ1 = 1 ka shumëfishmëri algjebrike 2 dhetë tjerët kanë shumëfishmëri algjebrike 1.
Për të gjetur shumëfishmëritë gjeometrike për λ1,λ2,λ3 duhet të gjejmë eigenvektorët e tyre korespon-dues. Duke zgjidhur sistemin korespondues kemi:
Për λ= 1 eigenvektorët janë
u =
1100
, u =
-1010
Kështu që shumëfishmëria gjeometrike e λ1 = 1 është 2.
Për λ2 dhe λ3 eigenvektorët janë respektivisht v2 dhe v3, si më poshtë:
v2 =
1252
-3
, v3 =
0010
Pra, shumëfishmëria geometrike për λ2 dhe λ3 është 1.
Vërejtje. Do shikojmë në kapitullin tjetër se dy shembujt e mësipërm paraqesin dy klasa të matricave. Nedo të mësojmë se si të veprojmë me secilën nga këto klasa.
Ushtrime:
1. Gjej eigenvlerat dhe shumëfishmëritë algjebrike dhe gjeometrike të tyre, për secilën nga matricat
A =
5 -1 0 21 2 1 03 1 -2 40 4 -1 2
, B =
5 2 0 23 2 1 03 1 -2 42 4 -1 2

106 T. Shaska
2. Le të jetë A një matricë diagonale n ×n e dhënë si më poshtë
A =
1 0 0 00 2 0 00 0 3 00 0 0 4
Cilat janë eigenvlerat dhe t shumëfishmëritë e tyre?
3. Llogarit eigenvlerat dhe shumëfishmëritë e tyre për matricën A3, ku A është e njëjtë si në shem-bullin e mësipërm.
4. Le të jetë A një matricë diagonale n ×n e tillë që det (A) 6= 0. Supozojmë se të gjithë elementët nëdiagonale janë të ndryshëm. Sa eigenvlera të ndryshme ka A dhe cilat janë shumëfishmëritë e tyre?
5. Le të jetë A një matricë 2 me 2 me trace T dhe përcaktor D. Gjej një formulë e cila të jap eigenvlerate A-së në termat e T-së dhe D-së.
6. Le të jetë A dhe B e dhënë si më poshtë:
A =
5 -1 0 21 2 1 03 1 -2 40 4 -1 2
, B =
5 2 0 23 2 1 03 1 -2 42 4 -1 2
Gjej eigenvlerat e tyre. Në secilin rast llogarit shumën dhe prodhimin e eigenvlerave dhe krahasoime tracenë dhe përcaktorin e matricës.
7. Vërteto se një matricë katrore ka të anasjelltë atëherë dhe vetëm atëherë kur të gjithë eigenvleratjanë jozero.
8. Le të jetë A një matricë 3 me 3. A mund të gjeni një formulë e cila të përcaktojë eigenvlerat e A-sënë qoftë se njohim trace dhe përcaktorin e A-së?
9. Gjej polinomin karakteristik, eigenvlerat dhe eigenvektorët e matricës
A = -1 -1 0
1 1 13 1 -2

3.4. METODAT ITERATIVE PËR GJETJEN E EIGENVLERAVE 107
3.4 Metodat iterative për gjetjen e eigenvlerave
Deri tani metoda e vetme për gjetjen e eigenvlerave të një matrice është zgjidhja e polinomeve karak-teristik. Në këtë seksion do të japim një metodë të re e cila shmang polinomin karakteristik dhe merr njëpolinom të përafërt me të, duke përafruar një eigenvektor fillimisht dhe më pas do të përdorim pikërishtkëtë eigenvektor për të gjetur eigenvlerat përkatëse.
3.4.1 Metoda fuqi
Metoda fuqi aplikohet mbi një matricë n ×n e cila ka një eigenvlerë dominuese λ1, ku eigenvleradominuese është ajo që në vlerë absolute është më e madhja. Për shembull, në qoftë se një matricë kaeigenvlerat −4,−3,1 dhe −4 atëherë eigenvlera e tij dominuese është −4.
Teorema 3.7. Le të jetë A një matricë e diagonalizueshme me eigenvlerë dominuese λ1. Aëherë gjendet njëvektor x0, jo-zero i tillë që vargu i vektorëve xk , i përkufizuar si:
x1 = Ax0,x2 = Ax1, . . . ,xk = Axk−1, . . .
i afrohet eigenvlerës dominante.
3.5 Matrica të ngjashme, diagonalizimi i matricave.
Në këtë seksion do të studiojmë konceptin e ngjashmërisë së matricave. Do të përcaktojmë kushte tënevojshme dhe të mjaftueshme që një matricë të jetë e ngjashme me një matricë diagonale. Kur kjo tëjetë e mundur do të gjejmë algoritmin për të përcaktuar këtë matricë diagonale.
Përkufizim 3.7. Dy matrica A dhe B quhen të ngjashme Në qoftë se existon një matricë C e tillë që
A = C−1 BC.
Dy matrica të ngjashme A dhe B i shënojmë me A ∼ B.
Lema 3.4. Vetia e ngjashmërisë është një veti ekuivalence.
Vërtetim: Relacioni i mësipërm është refleksiv sepse A = I−1AI.Në qoftë se A ∼ B, atëherë ekziston një matricë C e tillë që A = C−1BC. Duke shumëzuar nga e majta
me C dhe nga e djathta me C−1 kemi që B = CAC−1. Pra, B = (C−1
)−1AC−1. Kështu që B ∼ A.
Në qoftë se A ∼ B dhe B ∼ C, atëherë ekzistojnë matricat M dhe N të tilla që
A = M−1BM dhe B = N−1CN
Pra kemi
A = M−1BM = (M−1N−1) ·C · (NM) = (NM)−1C(NM).
Kështu që A ∼ C dhe relacioni është kalimtar.Teorema e mëposhtme është përfundimi më i rëndësishëm i këtij seksioni. Nuk do ta kryejmë vërtetimine saj.

108 T. Shaska
Teorema 3.8. Le të jetë A një matricë n ×n dhe
λ1, . . . ,λi , . . . ,λs
të gjitha eigenvlerat e ndryshme të A-së. Në qoftë se për çdo λi shumëfishmëria gjeometrike është e njëjtëme shumëfishmërinë algjebrike, themi
alg. mult.(λi ) = geom. mult. (λi ) = ei
AtëherëA = CDC−1
ku D është matrica diagonale e dhënë më poshtë
D =
λ1
. . .λ1
λ2
. . .λ2
. . .λn
. . .λn
e1
en
dheC = [
v1,1, . . .v1,ei ,v2,1, . . . ,v2,e2 , . . .vs,es
]si dhe vi ,1, . . . ,vi ,ei është një bazë për eigenhapësirën Eλi .
Matricën C në teoremën e mësipërme e quajmë matricë tranzicioni të A-së të shoqëruar me D.Shohim dy shembuj në lidhje me teoremën e mësipërme.
Shembull 3.14. Le të jetë
A =
2 1 0 2
-1 0 -1 02 1 0 11 0 -1 1
Zgjidhje: Polinomi i saj karakteristik është
char (A,λ) = (λ2 −2λ+2)(λ2 −λ−1)
Eigenvlerat janë
1± i,1
2±p
5
2
dhe shumëfishmëria algjebrike e tyre është 1. Tani gjejmë shumëfishmërinë gjeometrike për çdo eigenvlerë.λ= 1+ i: atëherë zgjidhim sistemin
A− (1+ i)In = 0

3.5. MATRICA TË NGJASHME, DIAGONALIZIMI I MATRICAVE. 109
Zgjidhja është
v1 =
1
−1+ i10
dhe eigenhapësira koresponduese ka dimension 1.
Në të njëjtën mënyrë, në qoftë se λ= 1− i atëherë eigenvektori është:
v2 =
1
−1− i10
Në qoftë se λ3 = 1
2 +p
52 , λ4 = 1
2 +p
52 , atëherë eigenvektorët korespondues janë
v3 =
− 132 + 5
2
p5
1
6−3p
5
152 − 7
2
p5
, v4 =
− 132 − 5
2
p5
1
6−3p
5
152 − 7
2
p5
Pra, meqënëse shumëfishmëria algjebrike e çdo eigenvlere është e njëjtë me shumëfishmërinë gjeometrike,atëherë A është e ngjashme
D =
1+ i 0 0 0
0 1− i 0 0
0 0 12 +
p5
2 0
0 0 0 12 −
p5
2
Matrica e tranzicionit në këtë rast është C = [v1,v2,v3,v4].
Lema 3.5. Matricat e ngjashme kanë eigenvlera të njëjtë.
Vërtetim: Le të jetë A ∼ B, themi seA = C−1BC
për ndonjë matricë C e cila ka të anasjelltë. Atëherë,
char (A,λ) = det (A−λ I) = det (A−λ I) ·det (C−1) ·det (C)
= det(C−1(A−λI)C
)= det(C−1AC−λC−1IC
)= det
(C−1AC−λI
)= det (B−λI) = char (B,λ).
Kështu që, polinomi karakteristik është i njëjtë. Pra, A dhe B kanë eigenvlera të njëjtë.
Lema 3.6. Le të jetë A një matricë n ×n dhe
λ1,λ2, . . . ,λn

110 T. Shaska
eigenvlerat e tyre (jo domozdoshmërisht të ndryshëm) të tilla që shumëfishmëria algjebrike dhe gjeometrikejanë të njëjtë. Atëherë,
tr (A) = λ1 +λ2 +·· ·+λn .
Vërtetim: Ushtrim
3.5.1 Diagonalizimi i matricave
Duam të shohim rastin e mëposhtëm: Na është dhënë një matricë A, gjej një matricë diagonale D tëtillë që A është e ngjashme me D. Gjithashtu, gjej matricën C e cila lidh A dhe D. Teorema e mësipërmejep një algoritëm se si mund ta zgjidhim këtë shembull.
Algorithm 7. Input: Një matricë A, me dimensione n ×nOutput: Matricat C dhe D të tilla që
A = C DC−1
Në qoftë se A është e diagonalizueshme, në të kundërt shkruaj’A nuk është e diagonalizueshme’.
i) Llogarit eigenvlerat e A-së dhe shumëfishmëritë algjebrike të tyre .
ii) Për çdo eigenvlerë λ1, llogarit shumëfishmërinë gjeometrike të λi dhe eigenvektorët kore-spondues
vi ,1, . . . ,vi ,s
iii) Krijo matricat D dhe C si në teoremën e mësipërme.
Shembull 3.15. Le të jetë A një matricë 4×4 e dhënë si më poshtë
A :=
9 0 0 0
-2 1 -3 -4-6 0 6 04 4 3 11
Gjej në qoftë se kjo matricë është e diagonalizueshme dhe nëse po, gjej një matricë diagonale D të ngjashmeme A dhe matricën transitive C të shoqëruar me D.
Zgjidhje: Polinomi karakteristik i A-së është
char (A, x) = (x −3)(x −6)(x −9)2.
Kështu që, eigenvlerat janëλ1 = 3, λ2 = 6, λ3 = 9
me shumëfishmëri algjebrike 1, 1, dhe 2 respektivisht. Eigenvektorët korespondues të λ1,λ2,λ3 janë respek-tivisht v1,v2, dhe w1,w2 si më poshtë
v1 :=
0
-201
, v2 :=
01
-31
, w1 :=
21
-40
, w2 :=
10
-21

3.5. MATRICA TË NGJASHME, DIAGONALIZIMI I MATRICAVE. 111
Pra, shumëfishmëritë gjeometrike janë respektivisht 1,1, dhe 2. Si rrjedhim matrica A është e diagonal-izueshme dhe C dhe D janë
D =
3 0 0 00 6 0 00 0 9 00 0 0 9
, C :=
0 0 2 1
-2 1 1 00 -3 -4 -21 1 0 1
Shembull 3.16. Le të jetë A një matricë 3 me 3 si më poshtë
A = 2 1 0
0 2 00 0 3
.
Kontrollon nëse A është e ngjashme me një matricë diagonale.
Zgjidhje: Atëherë char (A,λ) = (λ−2)2(λ−3). Për eigenvlerën λ= 2, shumëfishmëria algjebrike është 2 dheeigenhapësira jepet nga
E2 = {t
010
| t ∈Q}
Shumëfishmëria gjeometrike është 1, kështu që A nuk është e ngajshme me matricën diagonale të eigen-vlerave.
Lema 3.7. Le të jetë A e ngjashme me një matricë diagonale D e tillë që A = C−1 DC. Atëherë
An = (C−1)Dn C
Vërtetim: Ushtrim për lexuesin.
Ushtrime:
1. Le të jetë A një matricë n ×n me polinom karakteristik
char (A,λ) = anλn +αn−1λ
n−1 +·· ·+a1λ+a0.
Vërteto setr (A) = (−1)n−1 ·an−1.
2. Diagonalizo (Në qoftë se është e mundur) matricën:
A =
3 1 4 2
-1 0 -1 02 1 0 11 0 -1 1

112 T. Shaska
3. Le të jetë
A =
2 1 3 2
-1 0 -1 05 1 0 11 0 -1 3
, dhe B =
3 1 4 2
-1 0 -1 02 1 0 11 0 -1 1
.
Përcakto në qoftë se A dhe B janë të ngjashme.
4. Le të jetë
A =
2 1 3 2
-1 0 -1 05 1 0 11 0 -1 3
, dhe B =
-10 -2 2 3
+ 11 7 -5 1-15 -2 5 4-15 -4 5 3
.
Përcakto në qoftë se A dhe B janë të ngjashme.
5. Le të jetë
A =[
8 22 5
]Gjej eigenvkerat dhe eigenvektorët e saj. Gjej shumëfishmërinë gjeometrike dhe algjebrike. Gjejmatricat C,D të tilla që
A = C−1DC
6. Le të jetë
A = 1 2 4
3 5 22 6 9
Gjej eigenvlerat e A-së. Llogarit A11.
7. Le të jetë A një matricë 4 me 4
A :=
-2 -5 -2 -1
32
72
32 0
12
−12
−32 -1
−52
−72
−12 1
Vërteto se A = C−1DC ku
C :=
1 2 1 11 1 -1 0
-1 1 1 21 1 0 -1
, D :=
-1 0 0 00 -1 0 00 0 1 00 0 0 2
Llogarit A6.

3.6. USHTRIME PËRSËRITJE 113
8. Llogarit Ar për
A =[
-3 5-2 4
]ku r është një numër pozitiv.
Ushtrime programimi:
1) Shkruaj një program kompjuteri i cili të përcaktojë nëse një matricë A është e diagonalizueshmedhe nëse po të llogarisë matricat C dhe D të tilla që A = C−1DC. Programi nuk duhet të ekzeku-tohet, por të shkruhet në pseudo-code. Mund të supozoni ekzistencën e një funksioni i cilizgjidh ekuacione polinomiale të gradës n.
3.6 Ushtrime përsëritje
1. Le të jenë A dhe B dy matrica me eigenvlera të njëjta. A janë A dhe B domosdoshmërisht të ng-jashme? Shpjego përgjigjen.
2. Gjej eigenvlerat dhe shumëfishmëritë algjebrike dhe gjeometrike për matricën
A =
1 1 0 21 2 1 01 1 2 40 1 -1 2
3. Gjej eigenvlerat dhe shumëfishmëritë algjebrike dhe gjeometrike për matricën
B =
2 2 0 11 1 1 01 1 -2 11 4 -1 2
4. Një formë kuadratike është një ekuacion polinomial i gradës së dytë me tre ndryshore x, y , z, i cilika formën
F(x, y, z) = ax2 +by2 + cz2 +2d x y +2exz +2 f y z
ku koefiçientët a deri në i janë numra realë. Marrim në konsideratë kurbën
F(x, y, z) = j .
Atëherë ky ekuacion mund të shkruhet në formën
xt Ax = j

114 T. Shaska
ku
x = x
yz
dhe A = a d e
d b fe f c
Matrica A quhet matrica e shoqëruar me formën kuadratike F(x, y, z). Ndonjë herë është ndih-mëse nëse rrotullojmë boshtet xy në mënyrë të tillë që ekuacioni i kurbës së më sipërme të mos iketë termat x y, y z, xz. Këto forma kuadratike quhen forma kuadratike diagonale.
Le të jetë forma kuadratike F(x, y, z) e dhënë si më poshtë
F(x, y, z) = 2x2 +3y2 +5z2 −x y −xz − y z.
Gjej matricën tranzitive e cila transformon këtë formë në një formë diagonale.
5. Le të jetë F(x, y, z) një formë kuadratike dhe A matrica e saj shoqëruese. Inertia e A-së, e shënuarme i n(A), është e përkufizuar si treshja
i n(A) := (n1,n2,n3)
ku ni për i = 1,2,3 përcakton numrat pozitivë, negative dhe zero të eigenvlerave të A-së respek-tivisht. Vërteto pikat e mëposhtme:
i) Në qoftë se i n(A) = (3,0,0) atëherë forma kuadratike është një elipsoid.
ii) Në qoftë se i n(A) = (2,0,1) atëherë forma kuadratike është një parabolë eliptike.
iii) Në qoftë se i n(A) = (2,1,0) atëherë forma kuadratike është një hiperbolë of one sheet.
iv) Në qoftë se i n(A) = (1,2,0) atëherë forma kuadratike është një hiperbolë of two sheets.
v) Në qoftë se i n(A) = (1,1,1) atëherë forma kuadratike është një parabolë hiperbolike.
vi) Në qoftë se i n(A) = (1,0,2) atëherë forma kuadratike është një cilindër parabolik.
6. Le të jetë sfera njësi në R3 me ekuacion
x2 + y2 + z2 = 1
të dhënë. Duke përdorur metodën e ushtrimit të mëparshëm, klasifikoje sipas listës së më sipërme.
7. Klasifiko sipërfaqen kuadratike
2x2 +4y2 −5z2 +3x y −2xz +4y z = 2.

3.6. USHTRIME PËRSËRITJE 115
8. Klasifiko sipërfaqen kuadratike
x2 + y2 − z2 +3x y −5xz +4y z = 1.
9. Klasifiko sipërfaqen kuadratikex2 + y2 + z2 = 1.
10. Vërteto se në qoftë se A është matricë diagonale, atëherë A është e ngjashme me At .
Ushtrime programimi:
1) Shkruaj një program kompjuteri, i cili përcakton nëse çdo dy matrica A dhe B janë të ng-jashme. Përdor gjithçka që kemi përdor në Chapter 3, për ta bërë këtë program sa më efiçientqë të jetë e mundur.
2) Dizenjo algoritmin më të mirë që të jetë e mundur për llogaritjen e përcaktorit të një matrice.Shpjego zgjedhjen tuaj.

116 T. Shaska

Kapitulli 4
Format kanonike
Qëllimi kryesor i këtij kapitulli është të klasifikojmë transformimet e ndryshme lineare të një hapësirevektoriale apo klasat e ngjashmërisë së matricave.
Le të jetë V një hapësirë vektoriale me dimension n mbi fushën k dhe B një bazë e V-së. Gjithashtu,T : V → V është një funksion linear dhe A = MB
B(T) është matrica e tij shoqëruese. Duke zgjedhur një
bazë tjetër B′ për V na jep një matricë të re B = MB′B′ (T) të shoqëruar me T, të quajtur
B = P−1 AP
ku P = MBB′ (i d), shiko Kapitullin 2. A mund të gjejmë B′ të tillë që matrica shoqëruese e T-së të jetë sa
më e thjeshtë? Strategjia është të zgjedhimB′ të tillë qëB të jetë sa më afër me matricën diagonale. Kemidy raste:
i) k nuk i përmban të gjithë eigenvlerat e A-së
ii) k i përmban të gjithë eigenvlerat.
Këto dy raste na sjellin respektivisht tek forma racionale kanonike dhe forma kanonike e Xhordanit tëcilat do ti studiojmë ne seksionet 2 dhe 3.
4.1 Vetitë elementare të polinomëve
Në këtë seksion do të përsërisim disa nga vetitë elementare të polinomëve. Për më shumë detajelexuesit e interesuar mund të lexojnë [?SB], [?Sh-gal] ose [?DF].
Si më sipër, me fushë k do të kuptojmë një nga bashkësitë e mëposhtme: Q, R, or C.Një polinom f (x) me koefiçientë në k jepet si më poshtë
f (x) = an xn +an−1xn−1 +·· ·+a1x +a0
ku a0, . . . , an ∈ k. an quhet koefiçienti i parë i f (x). Polinomi f (x) quhet monik në qoftë se an = 1.Përcaktojmë si k[x] bashkësinë e të gjithë polinomëve në x me koefiçientë nga k. Le të jenë f , g ∈ k[x].
Me f +g , f ·g përcaktojmë mbledhjen dhe shumëzimin e zakonshëm të polinomëve. Bashkësia e të gjithë
funksioneve racional p(x)q(x) përcaktohet nga k(x),
k(x) :={
p(x)
q(x)
∣∣ p(x), q(x) ∈ k[x]
}117

118 T. Shaska
dhe është një fushë. Teorema në vazhdim vërteton se algoritmi i mirënjohur i Euklidit aplikohet edhe përpolinomet.
Teorema 4.1. (Algoritmi i Euklidit) Le të jenë f , g ∈ k[x] dhe supozojmë se g 6= 0. Atëherë ekzistojnënumrat e vetëm r , q ∈ k[x], të tillë që
f = q · g + r
ku deg r < deg g .
Polinomi r (x) quhet mbetje e pjestimit të f (x) me g (x). Në qoftë se r (x) është polinomi zero (dmth,r (x) ≡ 0) atëherë themi se g (x) pjesëton f (x) dhe shkruhet si g (x) | f (x). Në qoftë se α ∈ k e tillë qëf (α) = 0 themi se α është një rrënjë për f (x). Si rrjedhim kemi:
Rrjedhim 4.1. Le të jetë f ∈ k[x] dhe α ∈ k të tillë që f (α) = 0. Atëherë f (x) = (x −α) · g (x).
Le të jetë f (x) një polinom dhe α një rrënjë e f (x)-it, e tillë që
f (x) = (x −α)e · g (x)
dhe (x −α) - g (x). Numri e quhet shumëfishmëri e rrënjës α.
Rrjedhim 4.2. Le të jetë k një fushë e tillë që çdo polinom jo-konstant në k[x] ka një rrënjë në k. Atëherë,për çdo f ∈ k[x] ekzistojnë α1, . . . ,αn ∈ k dhe c ∈ k të tilla që
f (x) = c (x −α1) · · · (x −αn).
Rrjedhim 4.3. Le të jetë f ∈ k[x] e tillë që deg( f ) = n. Ekzistojnë jo më shumë se n rrënjë të f -së në k.
Teorema 4.2. (Teorema Themelore e Algjebrës) Çdo polinom f (x) me gradë n dhe koefiçientë në C ka nrrënjë, duke numëruar edhe shumëfishmëritë.
Shembull 4.1. Le të jetë f (x) ∈C[x] i dhënë si më poshtë
f (x) = (x2 +1)2 · (x −1)3 · (x −2)
Atëherë, rrënjët e f (x) janë i ,−i ,1, dhe 2 me shumëfishmëri 2, 2, 3 dhe 1, respektivisht. Kështu që, rrënjët ef (x) janë
i , i ,−i ,−i ,1,1,1,2.
Pra, ekzistojnë 8 rrënjë sikurse e prisnim meqënëse deg f = 8.
4.1.1 Polinomët e pathjeshtueshëm
Sikurse do të shohim në seksionet në vazhdim, është e rëndësishme të dimë nëse një polinom idhënë mund të faktorizohet ose jo mbi një fushë k (psh, k = Q). Një polinom f (x) ∈ k[x] është i path-jeshtueshëm në qoftë se nuk mund të shkruhet si prodhim
f (x) = g (x) ·h(x)
ku g (x) dhe h(x) janë polinomë jo-konstant. Do japim disa teknika se si të kontrollojmë nëse një polinomështë i pathjeshtueshëm mbi fushën e numrave racionalëQ.

4.1. VETITË ELEMENTARE TË POLINOMËVE 119
Teorema 4.3. (Test i rrënjës integrale) Le të jetë f (x) një polinom me koefiçientë të dhënë si më poshtë
f (x) = an xn +an−1xn−1 +·· ·+a1x +a0
dhe α një rrënjë e f (x) e tillë që α= bd , (b,d) = 1. Atëherë b | a0 dhe d | an .
Shembull 4.2. Vërteto se polinomi f (x) = x3 +2x +2 është i pathjeshtueshëm mbiQ.
Zgjidhje: Supozojmë se faktorët e f (x) janë nëQ[x] dhe se një nga faktorët është linear. Kështu që, f (x) kanjë rrënjë racionale α= b
d . Nga teorema e mëparshme kemi
b | 2, dhe d | 1
Kështu që, b = ±1,±2 dhe d = ±1. Atëherë kemi α = ±1,±2. Eshtë e thjeshtë për të parë se këto vlera nukjanë rrënjë të f (x). Kështu që f (x) është i pathjeshtueshëm.
Teorema 4.4. (Kriteri Eisenstein) Le të jetë f (x) një polinom me koefiçientë të dhënë si më poshtë
f (x) = an xn +an−1xn−1 +·· ·+a1x +a0
dhe p një numër i thjeshtë në A i tillë që:
i) p | ai për çdo i ≤ n −1ii) p2 - a0
iii) p - an .
Atëherë, f (x) është i pathjeshtueshëm mbiQ.
Shembull 4.3. Vërteto se
f (x) = x7 +12x6 −9x5 +30x4 −6x3 +15x2 +12x −3
është i pathjeshtueshëm mbiQ.
Zgjidhje: Kini parasysh se p = 3 i pjeston të gjithë koefiçientËt, përveç koefiçientit të parë. Për më tepërp2 = 9 nuk pjeston a0 =−3. Duke aplikuar teoremën e mëparshme arrijmë në përfundimin se f (x) është ipathjeshtueshëm mbiQ.
Teorema 4.5. (Kriteri i plotë i Eisensteinit) Le të jetë f (x) një polinom me koefiçientë të dhënë si më poshtë
f (x) = an xn +an−1xn−1 +·· ·+a1x +a0
dhe p një numër i thjeshtë në A i tillë që:
1. Ekziston një r (0 ≤ r ≤ n) e tillë që p - ar
2. p | ai për çdo 0 ≤ i ≤ r −1
3. p2 - a0
4. f (x) = h(x) · g (x), e tillë që h, g ∈ A[x].
Atëherë, deg(h) ≥ r ose deg(g ) ≥ r .

120 T. Shaska
Shembull 4.4. Le të jetë p një numër i thjeshtë. Vërteto se
f (x) = x5 +2x4 +3x3 +3
është i pathjeshtueshëm nëQ[x].
Zgjidhje: Përdorim teoremën e mëparshme. Meqënëse 3 pjeston a0, . . . , a3 por jo a4 atëherë r = 4. Kështuqë, në qoftë se f (x) është i thjeshtueshëm atëherë është prodhim i polinomëve të gradëse 4 dhe 1. Pra f (x)ka një rrënjë recionale. Vërteto se kjo nuk mund të ndodh me anë të testit të rrënjës integrale.
Ushtrime:
1. Përdor algoritmin e i Euklidit për të shkruar xn−1x−1 si një polinom.
2. Vërteto se f (x) = x3 −3x −1 është i pathjeshtueshëm nëQ.
3. Për çdo numër të thjeshtë p, vërteto se x2 −p dhe x3 −p janë të pathjeshtueshëm nëQ.
4. Le të jetë α ∈Z e tillë që α pjestohet nga një numër i thjeshtë p, por p2 - α. Vërteto se xn −α është ipashjeshtueshëm.
5. Vërteto se f (x) = x4 +1 është i pathjeshtueshëm mbiQ.
6. Vërteto se polinomët e mëposhtëm janë të pathjeshtueshëm mbiQ.
1) x4 +10x +5
3) x4 −4x3 +6
4) x6 +30x5 −15x3 +6x −120
7. Faktorizo mbiQ polinomin
f (x) = x3 −7x2 +16x −12.
8. Faktorizo mbiQ polinomin
f (x) = x3 +x2 +x −14.
9. Një ekuacion të gradës së dytë e zgjidhim me anë të formulave kuadratike. A dini ndonjë formulëpër të zgjidhur një polinom të gradës së tretë? Po për një polinom të gradës së 4, 5?

4.2. MATRICA SHOQERUESE, POLINOMI MINIMAL, FORMA NORMALE E SMITHIT. 121
4.2 Matrica shoqeruese, polinomi minimal, forma normale e Smithit.
Sikurse më sipër me k shënojmë një nga fushat Q,R, ose C dhe Matn×n(k) shënojmë hapësirën vek-toriale e të gjitha matricave n ×n me elementë në k. Le të jetë A ∈ Matn×n(k) dhe f ∈ k[x] e dhënë nga
f (x) = an xn +·· ·+a0.
Përkufizojmë me
f (A) := an An +·· ·+a1 A+a0 I.
Atëherë f (A) është një matricë n ×n me elementë në k.
Teorema 4.6. Le të jetë A ∈ Matn×n(k). Atëherë ekziston një f ∈ k[x] jo-zero e tillë që
f (A) = 0.
Vërtetim: Hapësira vektoriale Matn×n(k) ka dimension n2. Kështu që,
I, A, A2, . . . , As
janë linearisht të varur për s > n2. Pra, ekzistojnë a0, . . . , as të tillë që
as As + . . . aA+a0I = 0.
Marrim f (x) = as xs + . . . a1x +a0.
Përkufizim 4.1. Quajmë polinom minimal të A-së polinomin e vetëm monik m ∈ k[x] me gradë mini-male të tillë që m(A) = 0. Polinomin minimal të A-së e shënojmë me mA(x).
Përkufizim 4.2. Le të jetë f (x) një polinom monik në k[x] e dhënë me
f (x) = xn +an−1 xn−1 +·· ·+a0.
Matrica shoqëruese e f (x) është matrica n ×n
C f :=
0 0 . . . . . . −a0
1 0 . . . . . . −a1
0 1 . . . . . . −a2
. . . . . . . . .
. . . . . . . . .0 0 . . . 1 −an−1
dhe e shënojmë me C f .
Lema 4.1. Le të jetë f (x) ∈ k[x] dhe C f matrica shoqëruese. Polinomi karakteristik i C f është
char (C f , x) = f (x).
Vërtetim: Ushtrim.

122 T. Shaska
Për një matricë të dhënë A polinomi karakteristik char (A, x) = det (xI− A). Matrica (xI− A) mundtë konsiderohet si një matricë mbi fushën k(x). Për më tepër, A është gjithashtu në Matn×n(k(x) ). Nëteoremën në vazhdim do tregojmë se si çdo matricë në Matn×n(k(x) ) mund të transformohet në një ma-tricë diagonale me anë të veprimeve elementare. Këto veprime elementare janë
i) Këmbimi i vendeve të dy rreshtave apo kolonave (Ri ←→ R j )
ii) Duke shtuar një shumëfish (në k[x]) të një rreshti apo kolone (Ri −→ q(x) ·Ri +R j ).
iii) Duke shumëzuar çdo rresht apo kolonë me një element jo-zero në k (Ri −→ u ·Ri , për u ∈ k)
Dy matrica A dhe B, njëra prej të cilave mund të përfitohet duke kryer veprimet elementare në matricëntjetër, quhen ekuivalent sipas Gausit. Për matricat, elementët e të cilave janë polinomë kemi si mëposhtë:
Teorema 4.7. Le të jetë M ∈ Matn×n(k[x] ). Atëherë, duke përdorur veprimet elementare, matrica M mundtë kthehet në formën diagonale
1·
·1
e1(x)·
··
es (x)
ku e1(x), . . . ,en(x) janë polinomë monik të tillë që
ei (x) | ei+1(x), për i = 1, . . . , s −1.
Vërtetim: Do përdorim veprimet elementare për të transformuar M në një matricë diagonale. Nga tëgjitha matricat të cilat janë ekuvalente sipas Gausit me M, zgjidh matricën me elementë me gradë më tëulët. Një matricë e tillë le të jetë A = [ai j (x)] dhe elementi me gradë më të ulët është ai j =: m(x).
Duke shkëmbyer vendet e rreshtave me kolonat e sjellim këtë element në pozicionin (1,1). Të gjithëelementët e kolonës së parë mund të shkruhen si (algoritëm i Euklidit )
a1 j = m(x) q j (x)+ r j (x)
ku degr j (x) < degm(x).Duke kryer veprimin R j −m(x) q j (x) → R j për j = 2, . . .n kolona e parë e matricës është
m(x)r2(x)
. . .
. . .rn(x)
.

4.2. MATRICA SHOQERUESE, POLINOMI MINIMAL, FORMA NORMALE E SMITHIT. 123
Zgjidh elementin m′(x) me gradën më të vogël në kolonën e parë dhe duke këmbyer rreshtat ven-dose këtë element në pozicionin (1,1). Kryej të njëjtin proçes si më sipër. Atëherë gradat e r ′
j (x) do të
zvogëlohen të paktën me një njësi. Meqënëse k[x] është një bashkësi përcaktimi e Euklidit ky proçes dotë përfundoj pasi kemi kryer një numër të fundëm veprimesh dhe kolona e parë do të marrë këtë formë
m1(x)0
. . .
. . .0
.
Në të vërtetë, numri maksimal i veprimeve nuk mund të jetë më i madh se degm(x).Më pas kryejmë të njëjtën proçedurë për rreshtin e parë dhe marrim
m2(x) 0 . . . 0a′
2,1(x) a′2,2(x) . . . a′
2,n(x)a′
3,1(x) a′3,2(x) . . . a′
3,n(x). . .
a′n,1(x) a′
n,2(x) . . . a′n,n(x)
Duke vazhduar përsëri me kolonë e parë dhe kështu në vazhdim, marrim një varg veprimesh
A → A(1) → A(2) → . . .
Shënojmë me mi (x) elementin në pozicionin (1,1) pas veprimit të i -të. Atëherë
degm(x) > degm1(x) > . . .
Pra, proçedura duhet të ndalojë dhe matrica do të jetë si më poshtëe1(x) 0 . . . 0
0 a′′2,2(x) . . . a′′
2,n(x)0 a′′
3,2(x) . . . a′′3,n(x)
. . .0 a′′
n,2(x) . . . a′′n,n(x)
ku e1(x) ka gradën më të vogël dhe pjeston të gjithë elementët a′′
i , j (x).
Tani kryejmë të njëjtën proçedurë me kolonën dhe rreshtin tjetër. Si përfundim do marrim
D :=
e1(x) 0 . . . 0
0 e2(x) . . . 00 0 . . . 0
. . .0 0 . . . en(x)
të tillë që ei (x) | ei+1(x), për i = 1, . . . ,n −1.
Vërejtje. Në qoftë se të gjitha ei (x) = 0 atëherë do të ndodh në pozicionin e fundit meqënëse të gjithae j (x), j 6= i e tjera duhet të pjestojnë ei (x).

124 T. Shaska
Përkufizim 4.3. Le të jetë A ∈ Matn×n(k). Atëherë nga teorema e mësipërme, matrica xI− A mund tëvendoset në formën diagonale
1·
·1
e1(x)·
··
es (x)
e tillë që ei (x)-të janë monik dhe ei (x) | ei+1(x), për i = 1, . . . , s −1. Kjo quhet forma normale e Smithitpër A-në dhe elementët ei (x) me gradë jozero quhen faktorë invariant të A-së.
Lema 4.2. Polinomi karakteristik i A-së është prodhimi i faktorëve invariant të tij deri në shumëzimin menjë konstante.
Vërtetim: Kemichar (A, x) = det (xI−A).
Meqënëse (xI−A) ∼ Smith (A) atëherë
det (xI−A) = c ·det (Sm(A)),
për ndonjë c ∈ k.
Lema 4.3. Le të jenë e1(x), . . .es (x) faktorët invariant të A-së të tillë që
ei (x) |ei+1(x), për i = 1, . . . , s.
Polinomi minimal ma(x) është faktori invariant më i madh i A-së. Pra
es (x) = mA(x).
Vërtetim: Ushtrim
Shembull 4.5. Gje formën normale të Smithit për matricën A të dhënë si më poshtë:
A := 2 -2 14
0 3 -70 0 2
Zgjidhje: Kemi
xI−A = x - 2 2 - 14
0 x-3 70 0 x-2

4.2. MATRICA SHOQERUESE, POLINOMI MINIMAL, FORMA NORMALE E SMITHIT. 125
Kryejmë veprimet e mëposhtme elementare
xI−A = x −2 2 - 14
0 x −3 70 0 x −2
C1←→C2−→
2 x −2 - 14x −3 0 7
0 0 x −2
R2→(x−3)R1−2R2−→
2 x −2 - 140 (x −2)(x −3) −14(x −2)0 0 x −2
C2→(x−2)C1−2C2−→
2 0 - 140 −2(x −2)(x −3) −14(x −2)0 0 x −2
R1→ 12 R1, R2→− 1
2 R2−→
1 0 - 70 (x −2)(x −3) 7(x −2)0 0 x −2
C3→7C1+C3−→
1 0 00 (x −2)(x −3) 7(x −2)0 0 x −2
C2←→C3−→
1 0 00 7(x −2) (x −2)(x −3)0 (x −2) 0
R3→R2−7R3−→
1 0 00 7(x −2) (x −2)(x −3)0 0 (x −2)(x −3)
C3→(x−3)C2−7C3−→
1 0 00 7(x −2) 00 0 −7(x −2)(x −3)
R2→ 17 R2, R3→− 1
7 R3−→

126 T. Shaska
1 0 00 (x −2) 00 0 (x −2)(x −3)
e cila është forma normale e Smithit Sm(A). Lexuesi mund të kontrolloj se polinomi karakteristik i Smith (A)dhe A-së janë të njëjtë.
Ushtrime:
1. Gjej matricën shoqëruese tëf (x) = x3 −x −1.
2. Gjej matricën shoqëruese tëf (x) = (x −2)2(x −3).
3. Le të jetë A një matricë 2×2 me elementë nëQ e tillë që char (A, x) = x2+1. Gjej polinomin minimaltë A-së.
4. Le të jetë f (x) një polinom i pathjeshtueshëm i gradës së tretë nëQ. P.sh.
f (x) = ax3 +bx2 + cx +d .
Le të jetë A një matricë 3×3 me elementë në Q, të tillë që char (A, x) = f (x). Gjej polinomin mini-mal mA(x) of A. A mund ta përgjithësoni në një polinom të gradës n?
5. Gjej formën normale të Smithit të matricave në dy shembujt e mësipërm.
6. Përcakto të gjithë polinomët minimal të mundshëm të matricës A me polinom karakteristik
char (A, x) = (x −2)2(x −3)
7. Përcakto të gjitha format normale të Smithit, të mundshme së matricës A me polinom karakteristik
char (A, x) = (x −2)2(x −3)
8. Gjej të gjitha format normale të Smithit, të mundshme të matricës A me polinom karakteristik
char (A, x) = x3 −1.
Ushtrim programimi:
1) Shkruaj një program kompiuteri i cili gjen formën normale të Smithit për një matricë të dhënëA.

4.3. FORMA RACIONALE KANONIKE 127
4.3 Forma racionale kanonike
Le të jetë f (x) një polinom me koefiçient në një fushë k. Sikurse treguam në seksionin e mëparshëm,jo të gjitha rrënjët e një polinomi janë domosdoshmërisht në k. Për shembull, jo të gjithë polinomët mekoefiçientë racional faktorizohen në faktorë linear mbi bashkësinë e numrave racional. Le të jetë A njëmatricë e dhënë me elementë në k. Në këtë seksion do të shohim se si gjejmë matricën "më të mirë"D tëngjashme me A dhe me elementë përsëri në k. Lexuesi mund të supozojë se k =Q.
Le të jetë A ∈ Matn×n(k) dhe D = Smith (A), forma e tij normale e Smithit sikurse në seksionin emëparshëm. Le të jenë e1(x), . . . ,es (x) faktorët invariant të A-së dhe C1, . . . ,Cs matrica shoqëruese kore-sponduese. Matrica-bllok
C1
C2
··
·Cs
quhet forma kanonike racionale e A-së dhe e shënojmë me Rat (A). Fjala rationale përdoret për tëtreguar se kjo formë është llogaritur e gjitha brenda fushës k. Kini parasysh se,
e1(x) · · ·es (x) = c ·char (A, x)
e cila sjell si rrjedhim se
dege1 +·· ·+deges = deg char (A, x).
Kështu që, A dhe Rat (A) kanë dimension të njëjtë.
Shembull 4.6. Gjej formën kanonike racionale të matricës
A := 2 -2 14
0 3 -70 0 2
Zgjidhje: Faktorët invariant të kësaj matrice i gjetëm në Shembullin 4.5 në seksionin e fundit. Ato janëe1(x) = x −2 dhe e2(x) = (x −2)(x −3). Atëherë forma racionale e A-së është
Rat (A) = 2
0 -61 5
Teorema 4.8. Le të jetë k një fushë dhe A ∈ Matn×n(k). Atëherë pohimi i mëposhtëm është i vërtetë:
i) Dy matrica në Matn×n(k) janë të ngjashme atëherë dhe vetëm atëherë kur kanë të njëjtën formëracionale.
ii) Forma racionale e A-së është e vetme.

128 T. Shaska
Vërtetim: Le të jetë A e ngajshme me B. Atëherë char A(x) = char B(x) meqënëse janë polinome mbi k.Kështu që, forma normale e Smithit është e njëjtë për A-në dhe B-në. Pra, A dhe B kanë të njëjtën formëracionale.
Në qoftë se A dhe B kanë të njëjtën formë racionale, atëherë ata kanë të njëjtët faktorë invariant.
ii) Faktorët invariant mund të zgjidhen në mënyrë të vetme. Si rrjedhim edhe forma racionale ështëe vetme.
Shembull 4.7. Le të jetë A një matricë 10 me 10, e tillë që faktorët invariant të saj janë
e1(x) = x −2
e2(x) = (x −2)(x3 +x +1)
e3(x) = (x −2)(x −3)(x3 +x +1)
(4.1)
Gjej formën racionale kanonike të A-së.
Zgjidhje: Duke shumëzuar kemi
e2(x) = x4 −2x3 +x2 −x −2
e3(x) = x5 −5x4 +7x3 −4x2 +x +6(4.2)
Kështu që, forma racionale kanonike e A-së është
Rat (A) =
20 0 0 21 0 0 10 1 0 -10 0 1 2
0 0 0 0 -61 0 0 0 -10 1 0 0 40 0 1 0 -70 0 0 1 5
Shembull 4.8. Le të jetë A një matricë 8 me 8 e tillë që faktorët invariant të saj janë
e1(x) = x3 +x +1
e2(x) = (x2 +2)(x3 +x +1) = x5 +3x3 +x2 +2x +2(4.3)
Zgjidhje: Kështu që forma racionale kanonike është
Rat (A) =
0 0 -11 0 -10 1 0
0 0 0 0 -21 0 0 0 -20 1 0 0 -10 0 1 0 -30 0 0 1 0

4.4. TEOREMA E CAYLAY-HAMILTON 129
Ushtrime:
1. Gjej formën racionale kanonike të kësaj matrice mbiQ[1 23 4
]
2. Le të jetë A matrica 8 me 8 e dhënë si:
A =
0 0 0 0 0 0 0 11 0 0 0 0 0 0 00 1 0 0 0 0 0 00 0 1 0 0 0 0 00 0 0 1 0 0 0 00 0 0 0 1 0 0 00 0 0 0 0 1 0 00 0 0 0 0 0 1 0
Gjej eigenvlerat e saj. Cilat janë eigenvlerat e AT?
4.4 Teorema e Caylay-Hamilton
Teorema e Caylay-Hamilton është një nga teoremat më të njohura të algjebrës lineare. Mund të për-doret për llogaritjen e formave racionale kanonike të matricave.
Teorema 4.9. (Cayley - Hamilton) Le të jetë A ∈ Matn×n(k), mA(x) polinomi i saj minimal dhe char A(x)polinomi karakteristik i A-së. Atëherë,
mA(x) | char A(x).
Vërtetim: Le të jenë e1(x), . . . ,es (x) faktorët invariantë të A-së të tillë që ei (x) |ei+1(x), për i = 1, . . . s. Dimëse
char A(x) = e1(x) · · ·es (x)
Meqënëse es (A) = mA(A) = 0 dhe es (x) |char A(x), atëherë char A(A) = 0.Meqënëse m(x) është polinomi minimal, atëherë
degmA(x) ≤ degcharA(x).
Nga algoritmi i Euklidit,
charA(x) = q(x)mA(x)+ r (x)
i tillë që degr (x) < degmA(x). Meqënëse charA(A) = 0, atëherë r (A) = 0. Pra r (x) është polinomi zero, nëtë kundërt r (x) do të jetë polinomi minimal.

130 T. Shaska
4.4.1 Llogaritja e formës racionale kanonike
Seksioni i mësipërm përcakton një algoritëm për formën normale të Smithit të një matrice A. Kjona jep të gjithë faktorët invariant të A-së. Në qoftë se dimë faktorët invariant atëherë është e lehtë tëshkruajmë formën racionale kanonike Rat (A) of A. Gjithsesi, ekzistojnë teknika për të llogaritur direktformën racionale kanonike të një matrice duke kryer veprime elementare ose të gjesh faktorët invariantpa qenë nevoja të llogarisim formën normale të Smithit. Në këtë seksion do të paraqesim disa nga këtoteknika me anë të shembujve.
Shembull 4.9. Le të jetë A një matricë 3 me 3 e dhënë si më poshtë:
A =
233
703
203
- 43 - 11
3 - 43
-2 -7 -1
Gjej formën e saj racionale kanonike.
Zgjidhje: Polinomi karakteristik i A-së është
char (A, x) = (x −1)3.
Atëherë, nga teorema e Cayley-Hamilton polinomi minimal i A-së është një nga polinomët e mëposhtëm:
mA(x) = (x −1), (x −1)2, (x −1)3
Për më tepër, mA(A) = 0. Kontrollojmë se A− I 6= 0 dhe (A− I)2 = 0. Kështu që polinomi minimal është
mA(x) = (x −1)2
Kështu që forma normale e Smithit është
Smith (A) = 1
x −1(x −1)2
dhe forma racionale
Rat (A) = 1
0 -11 2
4.4.2 Llogaritja e matricës transformuese
Ne dimë se si të llogarisim formën racionale të një matrice A. Atëherë, A është e ngjashme me formëne saj racionale Rat (A). Kështu që ekziston një matricë C e cila ka të anasjelltë, e tillë që
A = C−1 Rat (A)C
Ne duam të llogarisim C. Strategjia është të mbajmë shënim të gjitha veprimet elementare të kryera nëxI−A dhe ti kryejmë këto veprime në I për të marrë C-në si prodhim i matricave elementare.

4.4. TEOREMA E CAYLAY-HAMILTON 131
Algorithm 8. Input: Një matricë A n ×nOutput: Matrica C e tillë që
A = C−1 Rat (A)C
1) Krijo matricën xI−A.
2) Transformoje në formën normale të Smithit dhe mbaj shënim të gjitha veprimet elementaretë kryera.
3) Për çdo veprimet në hapin 2, kryej veprimet e mëposhtme në matricën identike I sipas rreg-ullave të listuara mëposhtë:
a) Ri ←→ R j =⇒ Ci ←→ C j
b) Ri −→ q(x) ·Ri +R j =⇒ Ci −→ q(x) ·Ci +C j
c) Ri −→ u ·Ri , për u ∈ k =⇒ Ci −→ u ·C j
4) Matrica e përfituar pasi kemi kryer këto veprime në I është matrica e kërkuar C.
Ushtrime:
1. Gjej formën racionale të matricës 3 me 3 me faktorë invariant
e1(x) = (x −1), e2(x) = (x −1), e3(x) = x −1.
2. Gjej formën racionale kanonike të matricave mbiQ
A = 0 -4 85
1 4 -300 0 3
, B = 2 2 1
0 2 -10 0 3
dhe përcakto nëse A dhe B janë të ngjashme.
3. Gjej faktorët invariant factors të
2 2 13 4 11 5 1
4. Vërteto se dy matrica jo-skalare 2×2 mbi k janë të ngajshme atëherë dhe vetëm atëherë kur kanë
të polinom karakteristik të njëjtë.
5. Gjej formën racionale kanonike të 0 -1 -10 0 0
-1 0 0

132 T. Shaska
6. Përcakto të gjitha format racionale kanonike të mundshme për një matricë me polinom karakter-istik
f (x) = x2 (x2 +1)2
7. Përcakto të gjitha format racionale kanonike të mundshme për një matricë me polinom karakter-istik
f (x) = xp −1
për një numër tek të thjeshtë p.
8. Polinom karakteristiki i një matrice të dhënë A është
char (A, x) = (x −1)2 · (x +1) · (x2 +x +1).
Cilë janë polinomët minimal të mundshëm të A-së?
9. Gjej të gjitha klasat e ngjashme të matricave 2×2 me elementë nëQ dhe rend 4 (dmth, A4 = I).
Ushtrim programimi:
1) Shkruaj një program kompjuteri i cili gjen formë racionale kanonike të një matrice të dhënë A.
4.5 Forma kanonike e Xhordanit
Le të jetë α ∈ k. Atëherë një matricë e formës
Jα =
α 1α 1
· ·· ·
α 1α
quhet blloku i Xhordanit.
Lema 4.4. Le të jetë A një matricë s × s me polinom karakteristik
char A(x) = (x −α)s .
Atëherë, A është e ngjashme me matricën bllok s × s të Xhordanit Jα.
Vërtetim: Le të jetë f (x) := (x −α)s . Atëherë, teorema e Cayley-Hamilton sjell që
f (A) = (A−αI)s = 0.

4.5. FORMA KANONIKE E XHORDANIT 133
Kështu që, mA(x) = (x −α)r ose mA−αI(x) = xr . Pra, (A−αI) është e ngjashme me matricën shoqëruese Dtë g (x) := xr , ku
D =
0 10 1
0 ·· ·
· ·· 1
0
Pra, ekziston një matricë e cila ka të anasjelltë P e tillë që
P−1 (A−αI)P = D
e cila sjell se P−1 AP = D+αI. Pra, A është e ngjashme me
D+αI =
α 1α 1
α 1· ·
· ·α 1
α
Një matricë është në formën kanonike të Xhordanit në qoftë se është një matricë diagonale bllok
J =
J1
J2
..
Jn
me blloqe të Xhordanit përgjatë diagonales.
Teorema 4.10. Le të jetë A një matricë n×n me elementë në k dhe supozojmë se k përmban të gjithë eigen-vlerat e A-së. Atëherë,
i) A është e ngjashme me një matricë në formën kanonike të Xhordanit.ii) Forma kanonike e Xhordanit të A-së, të cilën e shënojmë me J(A) është e vetme sipas permuta-
cioneve të blloqeve.
Pra, për të gjetur formën kanonike të Xhordanit të një matrice A n me n, në fillim gjejmë faktorëtinvariant të saj e1(x), . . . ,es (x). Meqënëse fusha k përmban të gjithë eigenvlerat e A-së dhe çdo ei (x) |char (A, x), atëherë faktorizojmë faktorët invariant si
ei (x) = (x −α1)e1 · · · (x −αr )er
Për çdo αi , i = 1, . . . ,er kemi një bllok të Xhordanit. Meqënëse prodhimi i të gjithë faktorëve invariantbarazon polinomin karakteristik të A-së, kombinimi i të gjithë blloqeve të Xhordanit përgjatë diagonaletdo të krijojnë një matricë n me n (me të njëjtin dimension si A).

134 T. Shaska
Figura 4.1: Matrica në formën e Xhordanit.
Vërejtje. Forma kanonike e Xhordanit të një matrice A është diagonale atëherë dhe vetëm atëherë kur Aështë e diagonalizueshme.
Shembull 4.10. Të dyja matricat
A =
0 1 1 11 0 1 11 1 0 11 1 1 0
, B =
5 2 -8 -8-6 -3 8 8-3 -1 3 43 1 -4 -5
,
kanë të njëjtin polinom karakteristikf (x) = (x −3)(x +1)3.
Përcakto nëse këto matrica janë të ngjashme dhe gjej formën e tyre kanonike të Xhordanit.
Zgjidhje: Polinomi minimal për A dhe B është një nga polinomët e mëposhtëm:
m1(x) =(x −3)(x +1),
m2(x) =(x −3)(x +1)2,
m3(x) =(x −3)(x +1)3.
(4.4)
Kontrollojmë se (A−3I)(A+ I) = 0. Në të njëjtën mënyrë kontrollojmë se (B−3I)(B+ I) = 0. Kështu që,polinomi minimal i A-së dhe B-së është
m(x) = (x −3)(x +1).
Format normale të tyre të Smithit janë
Smith (A) = Smith (B) =
1
x +1x +1
(x −3)(x +1)

4.5. FORMA KANONIKE E XHORDANIT 135
Atëherë format kanonike të Xhordanit janë
J(A) = J(B) =
-1
-1-1
-3
Pra, A dhe B janë të ngajshme. Për më tepër, A dhe B janë matrica të diagonalizueshme dhe ne mund tidiagonalizojmë ato duke përdorur teknikat e kapitullit të mëparshëm.
Shembull 4.11. Le të jetë A një matricë e tillë që faktorët invariant të saj janë
e1(x) =(x −2)2(x2 +1)
e2(x) =(x −2)3(x2 +1)2(4.5)
Gjej formën racionale dhe kanonike të Xhordanit të A-së.
Zgjidhje: Duke kryer shumëzimet marrim
e1(x) =x4 −4x3 +5x2 −4x +4
e2(x) =x7 +6x6 +14x5 −20x4 +25x3 −22x2 +12x −8(4.6)
Forma racionale kanonike është
Rat (A) =
0 0 0 -41 0 0 40 1 0 -50 0 1 4
0 0 0 0 0 0 81 0 0 0 0 0 -120 1 0 0 0 0 220 0 1 0 0 0 -250 0 0 1 0 0 200 0 0 0 1 0 -140 0 0 0 0 1 -6
,
dhe forma kanonike e Xhordanit
J(A) =
2 10 2
-i+i
2 1 00 2 10 0 2
-i 10 -i
i 10 i

136 T. Shaska
Shembull 4.12. Le të jetë A një matricë 3 me 3 si më poshtë
A = 2 1 0
0 2 00 0 3
Gjej formën e saj kanonike të Xhordanit.
Zgjidhje: Atëherë char (A,λ) = (λ−2)2(λ−3). Për eigenvlerat λ= 2, shumëfishmëria algjebrike është 2 dheeigenhapësira jepet si:
E2 = {t
100
| t ∈Q}
Shumëfishmëria gjeometrike është 1, kështu që A nuk është e ngjashme me matricën diagonale të eigen-vlerave.
Kemi
xI−A = x −2 1 00 x −2 00 0 x −3
C1←→C2−→ 1 x −2 0
x −2 0 00 0 x −3
R2=(x−2)R1−R2−→
1 x −2 00 (x −2)2 00 0 x −3
C2=(x−2)C1−C2−→ 1 0 0
0 - (x −2)2 00 0 x −3
R2←→R3C2←→C3−→
1 0 00 x −3 00 0 (x −2)2
−→ 1 0 0
0 1 00 0 (x −2)2(x −3)
Atëherë forma e saj kanonike e Xhordanit është
J(A) = 2 1
0 23
.
Ne mund të kishim dalluar se A është në formën kanonike të Xhordanit. Vini re se shumëfishmëria gjeometrikepër çdo eigenvlerë është 1 dhe ekziston një bllok i Xhordanit për secilën prej tyre. Gjithashtu shumëfish-mëritë algjebrike të eigenvlerave janë 2 dhe 1 dhe blloqet korespondues të Xhordanit janë me përmasa 2dhe 1 respektivisht. Do të shohim se këto fakte nuk janë thjesht rastësi.
Ushtrime:
1. Le të jetë A një matricë me polinom karakteristik
char (A, x) = x3 +x2 +x +1

4.5. FORMA KANONIKE E XHORDANIT 137
Gjej formën racionale të A-së mbiQ dhe formën kanonike të Xhordanit të A-së mbi C.
2. Gjej formën racionale dhe formën kanonike të Xhordanit të 2 1 11 2 01 1 3
.
3. Llogarit formën kanonike të Xhordanit të një matrice me polinom karakteristik f (x) = xn −1, forn ≥ 2.
4. Vërteto se në qoftë se A2 = A, atëherë A është e ngjashme me matricën diagonale e cila ka vetëm 0dhe 1-sha përgjatë diagonales.
5. Gjej formëm kanonike të Xhordanit 3 2 01 2 71 -2 3
.
6. Gjej formën kanonike të Xhordanit 1 0 00 0 -20 1 3
.
7. Gjej formën kanonike të Xhordanit të matricave
A = 0 -4 85
1 4 -300 0 3
, B = 2 2 1
0 2 -10 0 3
dhe përcakto nëse A dhe B janë të ngjashme.
8. Përcakto formën kanonike të Xhordanit për matricën n ×n mbiQ e cila i ka të gjithë elementët 1.
9. Le të jetë A matricë 2×2 e cila i korespondon rrotullimit të planit kompleks me 2π5 . Gjej formën
kanonike të Xhordanit të A-së. Shpjego në termat e numrave kompleks.
10. Le të jetë A matricë 2×2 e cila i korespondon rrotullimit të planit kompleks me T(z) = 1z . Gjej for-
mën kanonike ë Xhordanit të A-së. Shpjego në termat e numrave kompleks.
Ushtrime Programimi:
1) Shkruaj një program kompjuteri i cili gjen format kanonike të Xhordanit të një matrice tëdhënë A.

138 T. Shaska
4.6 Ushtrime Përsëritje
1. Gjej formën racionale kanonike të një matrice A 5 me 5, me polinom karakteristik
char (A, x) = x5 +2x4 −12x3 +4x2 −6x +10
2. Le të jetë A një matricë n me n, e cila ka n eigenvlera të ndryshëm λ1, . . . ,λn . Gjej formën kanoniketë Xhordanit të A-së.
3. Polinomi karakteristik i një matrice A 3 me 3 është
char (A, x) = (x −1)2(x −2).
Gjej të gjitha format racionale dhe kanonike të Xhordanit të mundshme të A-së.
4. Përcakto nëse matricat A dhe B janë të ngjashme
A =
-1 1 0 00 -1 0 00 0 -2 00 0 0 -2
, B =
-1 1 0 00 -1 0 00 0 -2 10 0 0 -2
5. Diagonalizo matricën ose shpjego përse nuk mund të diagonalizohet.
A =
3 1 0 -14 0 0 3-4 2 2 -32 -4 0 7
6. Diagonalizo matricën ose shpjego përse nuk mund të diagonalizohet.
A =
7 -1 0 2
-10 4 0 -45 -1 2 2
-15 3 0 -4
7. Le të jetë A një matricë nilpotente n ×n. Vërteto se An = 0.
8. Le të jetë A një matricë trekëndore e sipërme (të gjithë elementët në diagonalen kryesore dheposhtë saj janë 0). Vërteto se A është nilpotent.
9. Le të jetë A një matricë 2×2, e cila i korespondon rrotullimit të planit kompleks me 2πn . Gjej formën
kanonike të Xhordanit të A-së. Shpjego në termat e numrave kompleks.

4.6. USHTRIME PËRSËRITJE 139
10. Përcakto bashkësinë e klasave të ngjashme të matricave A 3× 3 mbi C, të cilat kënaqin kushtinA3 = 1.
11. Përcakto bashkësinë e kalsave të ngjashme të matricave A 3× 3, mbi C, të cilat kënaqin kushtinA6 = 1.
12. Përcakto bashkësinë e klasave të ngjashme të matricave A 6×6 mbi C, me polinom karakteristik:
char (A, x) = (x4 −1)(x2 −1).

140 T. Shaska
Kapitulli 5
Prodhimi i brendshëm dheOrtogonaliteti
Në këtë kapitull do të studiojmë konceptin e rëndësishëm të prodhim të brendshëm në një hapësirëvektoriale. Pasi kemi paraqitur bazat ortogonale dhe ortonormale do të studiojmë proçesin e ortogo-nalizimit të Gram-Schmidt. Në seksionin e fundit do të japim një prezantim të thjeshtë të hapësiraveduale.
5.1 Prodhimi i brendshëm
Le të jetë V një hapësirë vektoriale mbi fushën k. Kini parasysh se në këtë libër me k shënojmë një ngafushat Q,R ose C. Për α ∈ k i konjuguari kompleks i α-së shënohet me α. Le të jetë f (u, v) një funksion idhënë si më poshtë
f : V ×V −→ k
(u, v) = f (u, v)(5.1)
Funksioni f quhet prodhim i brendshëm (prodhim skalar) në qoftë se vetitë e mëposhtme janë tëvërteta, për çdo u, v, w ∈ V dhe r ∈ k:
i) f (u, v) = f (v,u),ii) f (u, v +w) = f (u, v)+ f (u, w)iii) f (r u, v) = r f (u, v).
Prodhim e brendshëm do ta shënojmë me ⟨u, v⟩ në vend të f (u, v). Prodhim i brendshëm quhet jo-degenerate në qoftë se
⟨u, v⟩ = 0,për çdo v ∈ V =⇒ u = 0
Hapësira vektoriale V me një prodhim të brendshëm quhet njëhapësirë e brendshme. Japim disashembuj hapësirash të brendshme.
Shembull 5.1. Vërteto se ⟨u,αv⟩ = α⟨u, v⟩.Zgjidhje: Në të vërtetë, ⟨u,αv⟩ = ⟨αv,u⟩ = α⟨u, v⟩ = α⟨u, v⟩.
141

142 T. Shaska
Shembull 5.2. Le të jetë V =Rn dhe konsiderojmë produktin skalar
u = (u1, . . . ,un), v = (v1, . . . , vn)
u · v = u1v1 +·· ·+un vn
E lëmë si ushtrim për lexuesin të vërtetojë se ky është prodhim i brendshëm në V.
Shembull 5.3. Le të jetë V hapësira e funksioneve realë të vazhdueshëm në [0, 1]
f : [0,1] −→R
Për f , g ∈ V përkufizojmë
⟨ f , g ⟩ =∫ 1
0f (t ) · g (t )d t
Duke përdorur vetitë e integraleve është e lehtë të vërtetojmë se ky është një prodhim i brendshëm.
Shembull 5.4. Le të jetë V hapësira vektoriale si më sipër dhe
f (x) = sin x, g (x) = cos x
Llogarit ⟨ f , g ⟩.Zgjidhje: Kemi
⟨ f , g ⟩ =∫ 1
0sin x cos x d x = 1
2
∫ 1
0sin(2x) d x = 1
4(−cos2+cos0) = 1−cos2
4
Përkufizim 5.1. Le të jetë V hapësirë vektoriale dhe ⟨·, ·⟩ një prodhim i brendshëm në V. Le të jetë u ∈ V.E quajmë v-në ortogonale me u-në në qoftë se ⟨u, v⟩ = 0, ndonjëherë shënohet dhe si: u ⊥ v . Për njëbashkësi S ⊂ V bashkësia ortogonale e saj S⊥ është e përkufizuar si më poshtë
S⊥ := {v ∈ V | ∃ s ∈ S, s ⊥ v}
Në qoftë se S është një nënhapësirë e V-së atëherë S⊥ quhet komplementi ortogonal i S-së.
Kini parasysh se për çdo prodhim të brendshëm
⟨u,u⟩ = ⟨u,u⟩.Pra ⟨u,u⟩ ∈R dhe përkufizimi i mëposhtëm ka kuptim.
Përkufizim 5.2. Një prodhim i brendshëm është përkufizuar pozitivisht në qoftë se pikat e mëposhtmejanë të vërteta:
i) ⟨u,u⟩ ≥ 0 për çdo u ∈ V.ii) ⟨u,u⟩ > 0 atëherë dhe vetëm atëherë kur u 6= 0.
Norma e një elementi v ∈ V është e përkufizuar si
||v || :=√⟨v, v⟩.
Më poshtë do të studiojmë hapësirat vektoriale mbi R dhe ato mbi C.

5.1. PRODHIMI I BRENDSHËM 143
5.1.1 Prodhimi i brendshëm mbi numrat realë
Kini parasysh se në ktë rast përkufizimi i prodhimt të brendshëm është një funksion
⟨u, v⟩ : V ×V −→R
i tillë që vetitë e mëposhtme janë të vërteta për çdo u, v, w ∈ V dhe r ∈R:
i) ⟨u, v⟩ = ⟨v,u⟩,ii) ⟨u, v +w⟩ = ⟨u, v⟩+⟨u, w⟩iii) ⟨αu, v⟩ = α⟨u, v⟩ = ⟨u,αv⟩.
Shembull 5.5. Le të jetë V =Rn . Për çdo u, v ∈ V, të tillë që
u = (u1, . . . ,un), v = (v1, . . . , vn)
përkufizojmë⟨u, v⟩ = u1v1 +·· ·+un vn
Ky është produkti skalar që njohim nga hapësirat Euklideane, të cilat i studjuam në Kapitullin 1. Vërtetose ky është një prodhim i brendshëm.
5.1.2 Prodhimet Hermitiane
Le të jetë V një hapësirë vektoriale mbi C. Prodhim i brendshëm në këtë rast quhet prodhim hermi-tian. Ekziston një funksion në V
⟨u, v⟩ : V ×V −→C
i tillë që vetitë e mëposhtme janë të vërteta për çdo u, v, w ∈ V dhe r ∈C:
i) ⟨u, v⟩ = ⟨v,u⟩,ii) ⟨u, v +w⟩ = ⟨u, v⟩+⟨u, w⟩iii) ⟨αu, v⟩ = α⟨u, v⟩ dhe ⟨u,αv⟩ = α⟨u, v⟩.
Shembull 5.6. Le të jetë k ⊂C dhe V = kn . Për çdo
u = (u1, . . . ,un), v = (v1, . . . , vn)
përkufizojmë⟨u, v⟩ = u1v1 +·· ·+un vn
Vërteto se ky është një prodhim hermitian. Këtë prodhim në veçanti do ta quajmë prodhim i brend-shëm Euklidian.
Kini parasysh se për prodhimin e brendshëm Euklidian ⟨·, ·⟩⟨u,u⟩ = u1u1 +·· ·+un un = ||u1||2 +·· ·+ ||un ||2
Norma e u ∈ V është përkufizuar si
||u|| =√⟨u,u⟩ =
√||u1||2 +·· ·+ ||un ||2

144 T. Shaska
Shembull 5.7. Le të jetë V hapësira e funksioneve kompleks të vazhdueshëm
f : [0,1] −→C
Për f , g ∈ V përkufizojmë
⟨ f , g ⟩ =∫ 1
0f (t ) · g (t ) d t
Duke përdorur vetitë e integraleve kompleks vërteto se ky është një prodhim i brendshëm.
Shembull 5.8. (Seritë e Fourier) Le të jetë V hapësira e funksioneve të vazhdueshëm me vlera nga numratkompleks
f : [−π,π] −→C
Për f , g ∈ V përkufizojmë
⟨ f , g ⟩ =∫ π
−πf (t ) · g (t ) d t
Për çdo numër të plotë n, përkufizojmëfn(t ) = en·i t .
Vërteto se:
i) në qoftë se m 6= n atëherë ⟨ fn , fm⟩ = 0ii) ⟨ fn , fn⟩ = 2π
iii) ⟨ f , fn⟩⟨ fn , fn⟩ =
12π
∫ π−π f (t )e−i nt d t.
Vlera ⟨ f , fn⟩⟨ fn , fn⟩ quhet koefiçienti i Fourierit në varësi të f -së.
Teorema 5.1. Le të jetë V hapësirë vektoriale me dimension të fundëm mbi C me prodhim hermitian tëpërkufizuar pozitivisht. Në qoftë se W është një nënhapësirë e V-së, atëherë
V = W ⊕W⊥.
Për më tepër,dimV = dimW +dimW⊥.
Vërtetim: Ushtrim.
Ushtrime:
1. Le të jetë V = R2 dhe prodhimi i brendshëm është prodhimi Euklidian. Si përsritje e Kapitullit tëparë vërteto pikat e mëposhtme për çdo u, v ∈ V
i) ||u + v ||2 = ||u||2 +||v ||2ii) ||u + v || ≤ ||u||+ ||v ||iii) ||u|| = 0 atëherë dhe vetëm atëherë u = 0.
iv) |⟨u, v⟩| ≤ ||u|| · ||v ||

5.1. PRODHIMI I BRENDSHËM 145
2. Le të jetë V hapësira e finksioneve realë të vazhdueshëm
f : [0,1] −→R
Për f , g ∈ V përcaktojmë
⟨ f , g ⟩ =∫ 1
0f (t ) · g (t )d t
Për f (x) = x3 të dhënë, gjej g (x) ∈ V të tillë që g është ortogonal me f .
3. Le të jetë V hapësira vektoriale si në ushtrimin e mësipërm dhe W bashkësia e të gjithë polinomëvenë V. A është W nënhapësirë e V-së? Për një polinom të dhënë
f (x) = an xn +an−1xn−1 +·· ·+a1x +a0,
A mund të gjeni g (x) ∈ V i tillë që ⟨ f , g ⟩ = 0 ?
4. Le të jetë V := Matn(R). Përcakto prodhimin e brendshëm të matricave M dhe N si
⟨M,N⟩ = tr (MN)
Vërteto se ky është një prodhim i brendshëm dhe është jo-degenerate.
5. Vërteto inekualitetin e Schwartzit|⟨u, v⟩| ≤ ||u|| · ||v ||
për prodhimin hermitian.
6. Vërtato pikat e mëposhtme për prodhimin hermitian:
i) ||u|| ≥ 0
ii) ||u|| = 0 atëherë dhe vetëm atëherë u = 0.
iii) ||αu|| = |α| ||u||iv) ||u + v || ≤ ||u||+ ||v ||
7. Le të jetë V := Matn(R). Le të jenë A,B dy matrica në V të tilla që
A :=[
a1 a2
a3 a4
], dhe B :=
[b1 b2
b3 b4
]
A është prodhimi i mëposhtëm
⟨A,B⟩ = a1b1 +a2b2 +a3b3 +a4b4
një prodhim i brendshëm në V?

146 T. Shaska
8. Shënojmë me P2 hapësirën e polinomëve në k[x] dhe gradë ≤ 2. Le të jenë f , g ∈ P2 të tillë që
f (x) = a2x2 +a1x +a0, dhe g (x) = b2x2 +b1x +b0.
Përkufizojmë
⟨ f , g ⟩ = a0b0 +a1b1a2b2.
Vërteto se ky është një prodhim i brendshëm në P2.
9. Le të jetë P2 i pajisur me prodhimin e brendshëm si në shembullin e mësipërm. Përshkruaj të gjithëpolinomët me normë 1.
10. Le të jetë V := L ([0,1],R) hapësira e funksioneve realë të vazhdueshëm në [0,1] me prodhim tëbrendshëm
⟨ f , g ⟩ =∫ 1
0f (t ) · g (t )d t
Përshkruaj normën e shoqëruar me këtë prodhim të brendshëm dhe me të gjithë funksionet menorm 1.
5.2 Bazat ortogonale, proçesi i ortogonalizimit të Gram-Schmidt
Le të jetë V një hapësira vektorialebe me dimension të fundëm mbi k, me prodhim të brendshëm⟨·, ·⟩. Norma e një elementi v ∈ V është i përkufizuar si
||v || :=√⟨v, v⟩.
Le të jetë
B= {v1, . . . , vn}
një bazë për V-në. Atëherë B quhet bazë ortogonale në qoftë se për çdo i 6= j kemi
⟨vi , v j ⟩ = 0.
Në qoftë se për çdo i = 1, . . .n, ||vi || = 1 atëherë B quhet bazë ortonormale.
Teorema 5.2. Në qoftë se v1, . . . , vn janë linearisht të pavarur atëherë ekziston një bashkësi ortogonaleu1, . . . ,un e tillë që
Span (v1, . . . , vn) = Span (u1, . . .un)
Vërtetim: Ushtrim. Atëherë kemi rrjesdhimin e mëposhtëm.
Rrjedhim 5.1. Çdo hapësirë me prodhim të brendshëm dhe dimension të fundëm ka një bazë ortogonale.

5.2. BAZAT ORTOGONALE, PROÇESI I ORTOGONALIZIMIT TË GRAM-SCHMIDT 147
5.2.1 Algortimi i Gram-Schmidt
Algorithm 9. Input: Bashkësia S = {v1, . . . , vn} e vektorëve.Output: Një bashkësi ortogonale e vektorëve W = {w1, . . . , wn} e tillë që
Span (v1, . . . , vn) = Span (w1, . . . wn)
i) Fiksojmë një bashkësi të renditur S, psh
v1, v2, . . . , vn
ii) Le të jetëw1 := v1
iii) Llogarit të gjitha wi -të duke përdorur formulën rekursive
wi+1 = vi+1 − ⟨vi+1, wi ⟩⟨wi , wi ⟩
wi −·· ·− ⟨vi+1, w1⟩⟨w1, w1⟩
w1
për çdo i = 1, . . . , n −1.
iii) Bashkësia {w1, . . . , wn} është bashkësia W e kërkuar
Shembull 5.9. Le të jetë V =R3 dhe prodhimi i brendshëm në V është prodhimi skalar. Le të jetë
v1 = (1,2,3), v2 = (2,2,1)
dhënë. Gjej një bazë ortogonale të Span (v1, v2).
Zgjidhje: Le të jetë w1 = v1. Atëherë
w2 = v2 − ⟨v2, w1⟩⟨w1, w1⟩
w1 = (2,2,1)− 9
14(2,2,1) = (
19
14,
5
7,−13
14) (5.2)
Eshtë e qartë se w1 ⊥ w2.
Shembull 5.10. Le të jetë V hapësira e funksioneve realë të vazhdueshëm
f : [0,1] −→R
Për f , g ∈ V përkufizojmë
⟨ f , g ⟩ =∫ 1
0f (x) · g (x)d x
Si në shmebullin 1, ky është një prodhim i brendshëm. Le të jetë
f (x) = x, g (x) = x2

148 T. Shaska
Meqënëse të dy janë të vazhdueshëm atëherë f , g ∈ V. Gjej një bazë ortogonale të Span (u, v).
Zgjidhje: Le të jetë w1 = f . Atëherë
w2 = g − ⟨g , f ⟩⟨ f , f ⟩ f = x2 −
(∫ 10 x3 d x∫ 10 x2 d x
)x = x2 − 3
4x
Lexuesi duhet të kontrollojë nëse w1 ⊥ w2.
Konsiderojmë ushtrimin e seksionit 1. Duek përdorur proçedurën e Gram-Schmidt zgjidhja e këtyreushtrimeve është shumë e lehtë.
Shembull 5.11. Le të jetë V hapësira e funksioneve realë të vazhdueshëm. Në qoftë se f (x) = x3 është idhënë, gjej g (x) ∈ V i tillë që g të jetë ortogonal me f .
Zgjidhje: MarrimS = { f ,1}
Duam të gjejmë një bashkësi ortogonale W të tillë që f ∈ W. Le të jetë w1 = f . Atëherë
w2 = 1− ⟨1, f ⟩⟨ f , f ⟩ f = 1−
∫ 10 x3 d x∫ 10 x6 d x
x3 = 1− 7
4x3
Lexuesi mund ta kontrollojë këtë ⟨ f , w2⟩ = 0.
Ushtrime:
1. Gjeni një bazë ortogonale për hapësirën nul të matricës
A := 2 -2 14
0 3 -70 0 2
2. Gjeni një bazë ortogonale për hapësirën nul të matricës 2 1 1
1 2 01 1 3
.
3. Gjeni një bazë ortogonale për hapësirën nul të matricës
A =
3 1 0 -14 0 0 3-4 2 2 -32 -4 0 7
4. Le të jetë V hapësira e funksioneve realë të vazhdueshëm. Në qoftë se f (x) = x2 dhe g (x) = ex janë
të dhënë, gjej një bashkësi ortogonale W = {w1, w2} të tillë që Span ( f , g ) = Span (w1, w2).

5.2. BAZAT ORTOGONALE, PROÇESI I ORTOGONALIZIMIT TË GRAM-SCHMIDT 149
5. Në hapësirë e funksioneve realë të vazhdueshëm gjej një funksion g (x) i cili është ortogonal mef (x) = sin x.
6. Vërteto se identiteti i mëposhtëm është i vërtetë për çdo prodhim të brendshëm
||u+v||+ ||u−v|| = 2||u||+2||v||
7. Le të jetë V =R4 dhe prodhimi i brendshëm në V është prodhimi skalar. Le të jetë
v1 = (1,2,3,4),
v2 = (2,0,2,1),
v3 = (1,1,1,1),
v4 = (1,2,3,4)
v5 = (0,0,1,2)
(5.3)
e dhënë. Gjej një bazë ortogonale të Span (v1, v2, v3, v4, v5).
8. Shënojmë me P2 hapësirën e polinomëve në k[x] dhe gradë ≤ 2. Le të jenë f , g ∈ P2 të tillë që
f (x) = a2x2 +a1x +a0, dhe g (x) = b2x2 +b1x +b0.
Përkufizojmë
⟨ f , g ⟩ = a0b0 +a1b1a2b2.
Le të jenë f1, f2, f3, f4 të dhënë si më poshtë
f1 = x2 +3
f2 = 1−x
f3 = 2x2 +x +1
f4 = x +1.
(5.4)
Gjej një bazë ortogonale të Span ( f1, f2, f3, f4).
9. Gjej bazë ortogonale për nënhapësirën Span (1,p
x, x) e hapësirës vektoriale C0,1 të funksioneve tëvazhdueshëm në [0,1], ku ⟨ f , g ⟩ = ∫ 1
0 f (x)g (x)d x.
10. Gjej një bazë ortonormale për planin
x +7y − z = 0.
Ushtrime programimi:
1) Shkruaj një program kompjuteri i cili implementon proçedurën e Gram-Schmidt.

150 T. Shaska
5.3 Teorema e Sylvesterit
Le të jetë V një hapësirë vektoriale me dimension të fundëm mbiR dhe ⟨·, ·⟩ një prodhim i brendshëmnë V. Nga seksioni i mëparshëm ne mund të gjejmë një bazë ortogonale B= {v1, . . . , vn} të V. Meqënëseprodhimi i brendshëm nuk është domosdoshmërisht i përkufizuar pozitivishtë, atëherë ⟨vi , vi ⟩ mund tëjetë ≤ 0. Shënojmë
ci := ⟨vi , vi ⟩për i = 1, . . .n. Ne mund ta riorganizojmë bazën B të tillë që
c1, . . . ,cp > 0, cp+1, . . . ,cp+s < 0, cp+s+1, . . . ,cp+s+r = 0,
ku p + s + r = n. Teorema e Sylvesterit thotë se numrat p, s,r nuk varen nga zgjedhja e bazës ortogonaleB. E normalizojmë bazën si më poshtë. Le të jetë
v ′i :=
vi , në qoftë se ci = 0vip
ci, në qoftë se ci > 0
vip−ci, në qoftë se ci < 0
(5.5)
Atëherë bashkësia B′ është një bazë e V-së e tillë që
⟨vi , vi ⟩ =±1, or 0.
Një bazë e tillë quhet bazë ortonormale e V-së.Le të jetë
B= {v1, . . . , vn}
një bazë ortogonale e V-së e tillë që
c1, . . . ,cp = 1, cp+1, . . . ,cp+s =−1, cp+s+1, . . . ,cp+s+r = 0
ku p + s + r = n dhe ci := ⟨vi , vi ⟩.
Teorema 5.3. Numrat p,r, s janë të përkufizuar në mënyrë të vetme nga prodhimi i brendshëm dhe nukvaren nga zgjedhja e bazës ortogonale B.
Numrin e plotë p (resp., s) ndonjëherë e quajmë tregues i pozitivitetit (resp., negativitetit) dhe çifti(p, s) quhet shenjë e prodhimit të brendshëm.
Ushtrime:
1. Cila është shenja e Rn me prodhimin e brendshëm të zakonshëm Euklidian?

5.4. HAPËSIRA DUALE 151
2. Le të jetë W hapësira e gjeneruar nga
v1 = (1,2,3,4),
v2 = (2,0,2,1),
v3 = (1,1,1,1),
v4 = (1,2,3,4)
v5 = (0,0,1,2)
(5.6)
Gjej shenjën e prodhimit Euklidian për W.
3. Shënojmë me P2 hapësirën e polinomëve në k[x] dhe gradë ≤ 2. Le të jenë f , g ∈ P2 të tillë që
f (x) = a2x2 +a1x +a0, dhe g (x) = b2x2 +b1x +b0.
Përkufizojmë⟨ f , g ⟩ = a0b0 +a1b1a2b2.
Gjej shenjën e këtij prodhimi të brendshëm për P2.
5.4 Hapësira duale
Le të jetë V një hapësirë vektoriale mbi fushën k.
Përkufizim 5.3. Hapësira duale e V-së është hapësira vektoriale (mbi k)
V∗ :=L (V,k)
e të gjithë funksioneve lineare L : V −→ k. Elementët e hapësirës dual quhen funksionalë.
Shembull 5.12. Le të jetë V = kn . Shembuj të thjeshtë funksionalë janë funksionet kordinativë
φi (x1, . . . , xn) = xi
E lëmë si ushtrim për lexuesin të verifikoj nëse këto janë functionalë.
Teorema 5.4. Le të jetë V një hapësirë vektoriale me dimension të fundëm. Atëherë,
dimV = dimV∗
Vërtetim: Ushtrimi 1. Lema në vazhdim ndërton një bazë për V∗.
Lema 5.1. Le të jetë V një hapësirë vektoriale mbi fushën k dhe V∗ hapësirë duale e saj. Le të jetë
B= {v1, . . . , vn}
një bazë për V-në. Për çdo i = 1, . . .n, përkufizojmë
φi :={φ(vi ) = 1
φ(v j ) = 0,përj 6= i(5.7)
Funksionalet {φ1, . . . ,φn} formojnë një bazë për V∗.
152 T. Shaska
Vërtetim: Ushtrim.
Përkufizim 5.4. Baza {φ1, . . . ,φn} e V∗ quhet baza duale.
Koncepti i hapësirës dual është një koncept shumë i rëndësishëm në algjebrën lineare. Më poshtëjapim disa shembuj functionals të cilët janë të rëndësishme në fusha të ndryshme të matematikës.
Shembull 5.13. Le të jetë V një hapësirë vektoriale mbi k me prodhim skalar ⟨·, ·⟩. Fiksojmë një elementu ∈ V. Funksioni
V −→ k
v −→⟨v,u⟩
është a functional.
Shembull 5.14. Le të jetë V hapësira vektoriale e funksioneve të vazhdueshëm me vlera realë e në intervalin[0,1]. Përkufizojmë
δ : V −→R
e tillë që δ( f ) = f (0). Atëherë δ është një functional i quajtur funksionali Dirak.
Teorema 5.5. Le të jetë V hapësirë vektoriale me dimension të fundëm mbi k me një prodhim skalar jo-degenerate. Funksioni
Φ : V −→ V∗
v 7→ Lv(5.8)
është një izomorfizëm.
Vërtetim: Shiko për shembuj [?La] (faqe. 128).
Ushtrime:
1. Le të jetë V një hapësirë vektoriale me dimension të fundëm. Vërteto se dimV = dimV∗.
2. Le të jetë V = Matn×n(R). Përshkruaj V∗.
3. Le të jetë V =R2n. Përshkruaj V∗.

5.5. USHTRIME PËRSËRITJE 153
5.5 Ushtrime përsëritje
1. Le të jetë V hapësira e funksioneve realë të vazhdueshëm
f : [0,1] −→R
Për f , g ∈ V përkufizojmë
⟨ f , g ⟩ =∫ 1
0f (x) · g (x)d x
i) Le të jetë n një numër i plotë i fiksuar dhe
f (x) = sinnx, g (x) = cosnx
gjej ⟨ f , g ⟩.
ii) Gjej një funksion pingul me f (x) = ex .
2. Le të jetë V =C2 dhe ⟨·, ·⟩ prodhimi Euklidian në V. Le të jenë u,v ∈ V të tillë që
u = (2+ i , i −1), v = (i , i +3)
Gjej ⟨u,v⟩, ||u||, ||v||.
3. Le të jetë V := Matn(C). Le të jenë M,N dy matrica në V. Vërteto se
⟨M,N⟩ = tr (MN)
është një prodhim i brendshëm.
4. Le të jetë V =R4 dhe prodhim i brendshëm në V është prodhimi skalar. Le të jetë
v1 = (1,2,3,1), v2 = (2,2,1,2), v3 = (1,1,1,1)
e dhënë. Gjej një bazë ortogonale të Span (v1, v2, v3).
5. Gjej një bazë ortogonale për hapësirën nul të matricës
A := -1 -3 1
0 3 15 2 2
6. Gjej një bazë ortogonale për hapësirën nul të matricës 2 1 4
1 2 -14 1 3
.

154 T. Shaska
7. Gjej një bazë ortogonale për hapësirën nul të matricës
A =
3 1 7 -14 1 2 3-4 2 2 -32 -4 3 7
8. Gjej një bazë ortogonale për nëhapësirën Span (1,
px, x2) të hapësirës vektoriale C0,1 të funksion-
eve të vazhdueshëm në [0,1], ku ⟨ f , g ⟩ = ∫ 10 f (x)g (x)d x.
9. Gjej një bazë ortonormale për planin
4x +3y +2z = 0.

Kapitulli 6
Operatorët në hapësirat e brendshme
6.1 Operatorët në hapësirat e brendshme
T. Shaska
Le të jetë V një hapësirë vektoriale me dimension të fundëm mbi mbi k me prodhim skalar non-degenerate <,>.
Përkufizim 6.1. Një funksion linear A : V → V quhet f operator.
Lema 6.1. Le të jetë A : V → V një operator. Atëherë ekziston një operator i vetëm B : V → V i tillë që për çdov, w ∈ V kemi
< Av, w >=< v,Bw > .
Vërtetim: Ushtrim.
E quajmë B-në transpose të A-së dhe e shënojmë me At . Kështu që,
< Av, w >=< v, At w > .
Teorema 6.1. Le të jetë V hapësirë vektoriale me dimension të fundëm mbi k dhe me prodhim skalarnon-degenerate <,>. Le të jenë A,B operatorë të V-së, dhe c ∈ k. Atëherë pikat e mëposhtme janë të vërteta:
1. (A+B)T = AT +BT
2. (AB)T = BT AT
3. (c A)T = c AT
4. (AT)T = A
Vërtetim: Ushtrim
155

156 KAPITULLI 6. OPERATORËT NË HAPËSIRAT E BRENDSHME
6.2 Operatorët Hermitian
Le të jetë V një hapësirë vektoriale me dimension të fundëm mbi C dhe prodhim skalar pozitiv tëpërcaktuar <,>.
Teorema 6.2. Për një funksion të dhënë L : V →C, ekziston një w ′ ∈ V e vetme e tillë që L(v) =< v,W′ > përçdo v.
Vërtetim: Skip it.
Lema 6.2. Për një operator të dhënë A : V → V ekziston një operator i vetëm A∗ : V → V i tillë që ∀v, w ∈ Vkemi
< Av, w >=< v, A∗w > .
Vërtetim: Si në Lemën 6.1.Operatorin A∗ e quajmë f axhoint të A-së.
f Ushtrim: Vërteto se A∗ është linear.
f Exercise: Vërteto seA∗ = AT.
Një operator A quhet f hermitian (ose f self-axhoint) në qoftë se A∗ = A.
Teorema 6.3. Le të jetë V një hapësirë vektoriale me dimension të fundëm mbi C dhe me prodhim skalarpositive të përcaktuar <,>. Le të jenë A,B operatorë të V-së, dhe c ∈ k. Atëherë pikat e mëposhtme janë tëvërteta:
1. (A+B)∗ = A∗+B∗
2. (AB)∗ = B∗ A∗
3. (c A)∗ = c A∗
4. (A∗)∗ = A
Lema 6.3. Pikat e mëposhtme janë të vërteta:
< A(v +w), v +w >−< A(v −w), v −w >= 2[< Aw, v >+< Av, w >]
< A(v +w), v +w >−< Av, v >−< Aw, w >=< Av, w >+< Aw, v >Vërtetim: Ushtrim
Teorema 6.4. Le të jetë A një operator dhe
< Av, v >= 0 për të gjitha v ∈ V.
Atëherë, A = 0.
Vërtetim: Ushtrim
Teorema 6.5. Le të jetë V i dhënë si më sipër dhe A një operator. Atëherë A është hermitian atëherë dhevetëm atëherë kur
< Av, v >∈R për të gjitha v ∈ V.
Vërtetim:

6.3. OPERATORËT UNITARY 157
6.3 Operatorët unitary
Përkufizim 6.2. A quhet f realë unitary në qoftë se
< Av, Aw >=< v, w > për çdo v, w ∈ V
Teorema 6.6. Le të jetë V e dhënë si më sipër dhe A : V → V një funksion linear. Pikat e mëposhtme janë tëvërteta:
1) A është unitary2) A ruan normën e vektorëve (i.e., ||Av || = ||v || për çdo v ∈ V).3) Për çdo vektor njësi u ∈ V, Au është gjithashtu njësi.
Vërtetim:
Teorema 6.7. Le të jetë Ve dhënë si më sipër dhe A : V → V një funksion linear. Atëherë A është unitaryatëherë dhe vetëm atëherë kur
AT A = I.

158 KAPITULLI 6. OPERATORËT NË HAPËSIRAT E BRENDSHME

Kapitulli 7
Aplikime të Algjebrës Lineare
7.1 Aplikime në ekuacionet diferenciale
Në këtë seksion do të japim disa aplikime të algjebrës lineare në ekuacionet diferenciale. Pjesa mëe madhe e këtij materiali mund të gjendet në çdo libër ekuacionesh diferenciale. Ne duam thjesht tëtregojmë përdorimin e algjebrës lineare në këtë çështje pa e diskutuar në detaje.
7.1.1 Sisteme homogjene të ekuacioneve lineare të rendit të parë
Le të jetë dhënë si më poshtë një sistem linear me m ekuacione diferenciale dhe me n të panjohura:p1,1 y1(t )+·· ·+p1,n yn(t ) = y ′
1(t )
p2,1 y1(t )+·· ·+p2,n yn(t ) = y ′2(t )
. . . . . . . . . . . . . . . . . . . . . . . .
pm,1 y1(t )+·· ·+pm,n yn(t ) = y ′n(t )
(7.1)
ku pi , j janë konstante dhe y1, . . . , yn janë funksione në varësi të t-së. Gjithashtu, shënojmë me y ′i (t )
derivatin e parë të yi (t ) për çdo i . E shkruajmë këtë sistem në formë matrice si
A ·y(t ) = y′(t ) (7.2)
ku
A = [pi , j ] =
p1,1 p1,2 p1,3 . . . p1,n
p2,1 p2,2 p2,3 . . . p2,n
p3,1 p3,2 p3,3 . . . p3,n
···
pm,1 pm,2 pm,3 . . . pm,n
, y(t ) =
y1
y2
y3
ym
, y′(t ) =
y ′1
y ′2
y ′3
y ′m
.
Prej Kapitullit 2 dimë se çdo sistem linear ekuacionesh nuk ka zgjidhje, ka një zgjidhje ose një numërtë pafundëm zgjidhjesh. Në rastin kur ka një numër të pafundëm zgjidhjesh, atëherë hapësira e zgjid-hjeve është një hapësirë vektoriale dhe ne duam të kemi një bazë për këtë hapësirë vektoriale. Le të jenë
159

160 T. Shaska
Y1, . . . ,Yn zgjidhje të sistemit (7.2) për çdo pikë në intervalin t ∈ (α,β). Këto zgjidhje i quajmë linearishttë pavarur në qoftë se përcaktori i matricës
M :=
Y1 Y2 Y3 . . . Yn
Y′1 Y′
2 Y′3 . . . Y′
n
Y(2)1 Y(2)
2 Y(2)3 . . . Y(2)
n···
Y(m)1 Y(m)
2 Y(m)3 . . . Y(m)
n
është jozero. E shënojmë këtë me
W(Y1, . . . ,Yn) := det (M)
dhe e quajmë Wronskian e Y1, . . . ,Yn . Teorema e mësipërme nga ekuacionet diferenciale përcaktojmë njëhapësirë të tillë.
Teorema 7.1. Le të jenë Y1, . . . ,Yn zgjidhje linearisht të pavarura të sistemit (7.2) për çdo pikë në intervalint ∈ (α,β). Atëherë çdo zgjidhje Y(t ) mund të shprehet si një kombinim linear i Y1, . . . ,Yn ,
Y(t ) = c1Y1(t )+·· ·+cnYn(t ).
Bashkësia e zgjidhjeve Y1, . . . ,Yn quhet bashkësia themelore e zgjidhjeve.
Shembull 7.1. Zgjidh ekuacionin diferencial të mëposhtëm
y ′(t ) = a · y(t )
me vlerë fillestare y(0) = y0.
Zgjidhje: Ekuacioni ka zgjidhje të përgjithshme
y(t ) = ceat .
Duke përdorur kushtin e vlerës fillestare marrim y(t ) = y0eat .
Le të jetë dhënë sistemi homogjen.A ·y(t ) = y′(t ) (7.3)
Në qoftë se matrica e koeficientëve A është në formën diagonale, atëherë sistemi është:
a11 · y1(t ) = y ′1(t )
a22 · y2(t ) = y ′2(t )
···
ann · yn(t ) = y ′n(t ).
(7.4)
Zgjidhja e përgjithshme është dhënë nga
y =
y1
y2
···
yn
=
k1 ea11t
k2 ea22t
···
kn eann t

7.1. APLIKIME NË EKUACIONET DIFERENCIALE 161
Në përgjithësi, diagonalizojmë A-në dhe reduktojmë sistemin (7.1) në (7.4). Në qoftë se A mund të diag-onalizohet atëherë shkruhet si
A = C−1DC
ku D është matrica diagonale si në kapitujt 3 ose 4. Atëherë
C−1DC y = y′
dhe
DCy = Cy′.
Le të jetë v = Cy, atëherë v′ = Cy′. kështu që
Dv = v′.
Tani proçedojmë si në ekuacionin (7.4).
Shembull 7.2. Zgjidh sistemin linear diferencialy ′
1 = y1 − y2 − y3
y ′3 = y3 − y2 − y1
y ′2 = y2 − y1 − y3
Zgjidhje: Matrica e koeficientëve është
A = 1 -1 -1
-1 1 -1-1 -1 1
.
Forma normale e saj e Xhordanit është
J(A) = C−1AC = -1 0 0
0 2 00 0 2
, ku C = 1 -1 -1
1 1 01 0 1
.
Përcaktojmë v = C−1y dhe zgjidhja është
v = k1 e−t
k2 22t
k3 e2t
.
Atëherë,
y = Cv = 1 -1 -1
1 1 01 0 1
v1
v2
v3
= k1e−t −k2e2t −k3e2t
k1e−t +k2e2t
k1e−t +k3e2t

162 T. Shaska
7.1.2 Ekuacionet diferenciale të rendit të n-të
Tani do shohim sesi metoda e mësipërme mund të përdoret për të zgjidhur ekuacione diferenciale tërendeve më të larta. Fillojmë me ekuacione diferenciale homogjene. Le të jetë
y (n) +an−1 y (n−1)(t )+ . . . a1 y ′1(t )+a0 y = 0
një ekuacion diferencial homogjen. Bëjmë zëvendësimet e mëposhtme y (i−1) = yi , për i = 1, . . .n dhey (0) = y . Atëherë sistemi merr formën
A ·y = y′ (7.5)
ku
A =
0 1 0 . . . . . . 00 0 1 . . . . . . 0
·· 0
0 0 · . . . . . . 1−a0 −a1 −a2 . . . . . . an−1
, y =
y1
y2
y3
ym
, y′ =
y ′1
y ′2
y ′3
y ′m
.
Tani vazhdojmë duke zgjidhur këtë sistem si në seksionin e mësipërm.
Shembull 7.3. Gjej zgjidhje e përgjithshme të ekuacionit diferencial
y′′′ −7y
′′ +14y′ −8y = 0.
Zgjidhje: Le të jetë y1 = y, y2 = y′, y3 = y
′′. Atëherë kemi sistemin 0 1 0
0 0 18 -14 7
·y1
y2
y3
=y ′
1y ′
2y ′
3
.
Lexuesi mund të kontrollojë se zgjidhja e përgjithshme është
y(t ) = c1e t + c2e2t + c3e4t .
Mund të përdorim një mënyrë më të shpejtë për të zgjidhur
Ay = y′.
Shënojmë eigenvlerat e A-së me λi , i = 1, . . . ,r dhe le të jenë mi shumëfishmëritë e tyre respektive algje-brike. Atëherë, zgjidhje e përgjithshme do të ketë formën
y(t ) =[
c1,0eλ1t + c1,1teλ1t +·· ·+c1, j t j eλ1t + c1,m1−1t m1−1eλ1t]
+ . . . · · ·++ . . . · · ·+[cr,0eλr t + cr,1teλr t +·· ·+cr, j t j eλr t + c1,mr −1t mr −1eλr t
] (7.6)
Eshtë e qartë se polinomi karakteristik i A-së është i dhënë nga
char (A,λ) = λn +an−1λn−1 +·· ·+a1λ+a0.

7.1. APLIKIME NË EKUACIONET DIFERENCIALE 163
Shembull 7.4. Gjej zgjidhjen e përgjithshme të ekuacionit diferencial
y (6) −14y (5) +79y (4) −228y (3) +351y (2) −270y +81 = 0.
Zgjidhje: Atëherë kemi polinomin karakteristik
λ6 −14λ5 +79λ4 −228λ3 +351λ2 −270λ+81 = 0
i cili faktorizohet si
(λ−1)2 (λ−3)4 = 0.
Kështu që, eigenvlerat janëλ1 = 1 dheλ2 = 3 me shumëfishitet 2 dhe 4 respektivisht. Zgjidhja e përgjithshmeështë
y(t ) = c1e t + c2te t + c3e3t + c4te3t + c5t 2e3t .
Vërejtje. Metoda e mësipërme përfshin rrënjët e një ekuacioni polinomial të gradës së n-të i cili ështëjoefektive nëse nuk përdorim disa teknika të tjera.
7.1.3 Metoda e variation të parametrave
Tani ne mund ta përgjithësojmë teknikën e mësipërme për çdo ekuacion diferencial të gradës n. Letë jetë
y (n) +pn−1(t )y (n−1) + . . . p1(t )y ′1 +p0(t )y = g (t )
një ekuacion diferencial, për t ∈ [a,b]. Do të përshkruajmë shkurtimisht se si të zgjidhim një ekuacion tëtillë. Nliteraturë kjo metodë njihet si metoda e variation të parametrave.
Nga ekuacioni homogjen
y (n) +pn−1(t )y (n−1) + . . . p1(t )y ′+p0(t )y = 0
në fillim gjejmë një bashkësi themelore zgjidhjesh
Y1, . . . ,Yn
Përdoren teknika të ndryshme, në qoftë se pi -të janë funksione konstante apo jo. Në seksionin e më-parshëm diskutuam rastin kur të gjitha pi -të janë funksione konstante.
Pasi kemi gjetur një bashkësi zgjidhjesh themelore, atëherë zgjidhje e përgjithshme ka formën
y(t ) = c1Y1 +·· ·+cnYn +Y(t )
ku Y(t ) quhet zgjidhje e veçantë. Atëherë, Y(t ) është dhënë nga
Y(t ) = u1Y1 +·· ·+unYn
i tillë që u1, . . . ,un janë funksione diferencial në t .

164 T. Shaska
Për të përcaktuar u1, . . . ,un vazhdojmë si më poshtë: Ne mund të llogarisim Y′, . . .Y(n−1) dhe marrimkushte fillestare të mjaftueshme të tilla që sistemi linear i mëposhtëm të jetë i vërtetë:
Y1 Y2 . . . Yn
Y′1 Y′
2 . . . Y′n
. . . . . .
. . . . . .
. . . . . .Y(n−1)
1 Y(n−1)2 . . . Y(n−1)
n
u′1
u′2
.
.
.u′
n
=
00..0
g (t )
Ne mund ta zgjidhim këtë sistem linear duke përdorur rregullin e Kramerit. Kështu që kemi gjeturu′
1, . . . ,u′n , të cilat janë funksione të integrueshëm në [a,b].
Për më tepër, ne gjejmë u1, . . .un duke integruar
ui =∫
u′i d t .
Zgjidhja e veçantë ështëY(t ) = u1Y1 +·· ·+unYn
dhe zgjidhja përfundimtare është
y(t ) = c1Y1 +·· ·+cnYn +Y(t ).
Metoda e variacionit të parametrave është e përshkruar në detaje në çdo libër elementarë ekuacioneshdiferenciale. Ne dhamë vetëm një përshkrim të shkurtër tË metodës. Për më shumë detaje lexuesi duhettë kontrollojë librat e ekuacioneve diferenciale.
Shembull 7.5. Zgjidh ekuacionin diferencial
y′′ −6y
′ +8y = e t .
Zgjidhje: Së pari gjejmë bashkësinë themelore të zgjidhjeve të ekuacionit homogjen
y′′ −6y
′ +8y = 0.
Ekuacioni karakteristik ështëλ2 −6λ+8 = 0
dhe eigenvlerat janë λ1 = 2 dhe λ2 = 4. Pra zgjidhja e përgjithshme është
y(t ) = c1e2t + c2e4t +Y(t )
kuY(t ) = u1(t ) ·e2t +u2(t )e4t .
Kështu që kemi [e2t e4t
2e2t 4e4t
] [u′
1u′
2
]=
[0e t
]dhe
u′1 =
1
2e−3t , u′
2 =−1
2e t .

7.1. APLIKIME NË EKUACIONET DIFERENCIALE 165
Duke integruar në varësi të t-së marrim
u1 =−1
6e−3t + c, u2 =−1
2e t + c.
Kështu që,
y(t ) = c1e2t + c2e4t − 1
6e−3t − 1
2e t + c.
Mund të përdorim teknika të ndryshme për të përcaktuar Y(t ). Pjesa më e madhe e tyre do të varennga funksioni g (t ). Në ushtrimet e mëposhtme lexuesi do të gjej ekuacione me zgjedhje të tjera të g (t ).
Ushtrime:
1. Zgjidh sistemin e mëposhtëm linear të ekuacioneve diferenciale.{y′1 = 3y1 −5y2
y′2 = y1 −2y2
2. Zgjidh sistemin e mëposhtëm linear të ekuacioneve diferenciale.y′1 = y1 +2y2 −3y3 − y4 +11y5
y′2 = 2y1 + y2 −3y3 −5y4 +3y5
y′3 = 3y1 −2y2 + y3 +3y4 +4y5
y′4 = 4y1 +4y2 +2y3 −7y4 +6y5
y′5 = 6y1 −3y2 −5y3 +2y4 +9y5
3. Zgjidh sistemin e mëposhtëm linear të ekuacioneve diferenciale.y′1 = y1 + y5
y′2 = y2 −3y3 −5y4
y′3 = y3 +3y4 +4y5
y′4 = 4y2 +2y3 −7y4
y′5 = 6y1 −2y4 +9y5
4. Zgjidh ekuacionin diferencial
y (5) −15y (3) +10y′′ +60y
′ −72y = 0
5. Zgjidh ekuacionin diferencial
y′′ −3y
′ +17y = 0
6. Zgjidh ekuacionin diferencial
y′′ −3y
′ +17y = e t

166 T. Shaska
7. Zgjidh ekuacionin diferencial
y′′ −7y ′+12 = e2t
me kushte fillestare y ′(0) = 1 dhe y(0) = 2.
8. Gjej zgjidhjen e përgjithshme të ekuacionit
y′′ −7y ′+12 = e−2t .
7.2 Metoda e katrorëve më të vegjël
Metoda e katrorëve më të vegjël u zbulua për herë të parë nga Gausi në fillim të viteve 1800 dhe ështëpërdorur gjatë gjithë kohës që atëherë në shumë fusha të matematikës dhe inxhinierisë. Marrim në kon-sideratë problemin e mëposhtëm:
Problem: Kemi bashkësinë e dhënë
x x1 x2 x3 x4 . . . xn
y y1 y2 y3 y4 . . . yn
Tabela 7.1: Pershtatja e funksionit
Gjej një funksion linear y = f (x) që u përshtatet më mirë këtyre të dhënave.
Geometrikisht dy nga këto pika (xi , yi ) përcaktojnë një drejtëz. GJithsesi, ne po kërkojmë drejtëzën ecila është "më afër"me të gjitha këto pika. Le të supozojmë se ekuacioni i f (x) është i dhënë nga
f (x) = ax +b.
Atëherë kemi
yi = axi +b, për i = 1, . . .n.
Në përkufizimin e matricës kemi
x1 1x2 1· ·· ·· ·
xn 1
[
ab
]=
ax1 +bax2 +b
···
axn +b
ose e shkruajmë këtë si
Av ∼= y,

7.2. METODA E KATRORËVE MË TË VEGJËL 167
ku
A =
x1 1x2 1· ·· ·· ·
xn 1
, v =[
ab
], y =
ax1 +bax2 +b
···
axn +b
.
Tani na duhet të përcaktojmë v =[
ab
]të tillë që vektori i gabimit Av− y është minimal. KOncepti i
minimalit varet nga lloji i aplikimit. Metoda e katrorve më të vegjël është bazuar në idenë se na duhet qëmagnituda ||Av−y|| të jetë minimale. Shënojmë me d := Av−y. Atëherë, di = ax+b−yi . Duke minimizuar||Av−y|| ndomethënë që minimizojmë ||Av−y||2, e cila domethënë që minimizojmë
d 21 +d 2
2 +·· ·+d 2n .
Le të jenë v1 dhe v2 vektorë kolona të A-së. Vektori Av = av1+bv2 shtrihet në hapësirën W = Span (v1, v2).Ne duam të gjejmë një vektor v0 ∈ W të tillë që prodhimi skalar Av · (Av0 −y) = 0 për çdo v ∈ W. Atëherëkemi
Av · (Av0 −y) = (Av)T (Av0 −y) = (Av)T Av0 − (Av)Ty
= vT AT Av0 −vT ATy = vT (AT Av0 −ATy
)= 0(7.7)
për çdo v ∈ W. Sepse prodhimi skalar është një prodhimi i brendshëm jo-degenerate atëherë
AT Av0 −ATy = 0
dhev0 = (AT A)−1 ATy.
MatricënP := (AT A)−1 AT
ndonjëherë e quajmë matrica projeksion e A-së.
Shembull 7.6. Le të jenë dhënë të dhënat e mëposhtme
x 1 2 2 5y 2 3 5 7
Gjej një funksion linear i cili përputhet sa më mirë me të dhënat.
Zgjidhje: Atëherë
A :=
1 12 12 15 1
, dhe b =
2357
Kemi
AT A =[
34 1010 4
]

168 T. Shaska
Zgjidhja e katrorëve më të vegjël është
v0 = (AT A)−1 ATy = 1
6
[78
]Kështu që, drejtëza që përputhet më mirë me të dhënat e mësipërme është
y = 7
6x + 4
3
Sikurse do të shikojmë në kapitullin e mëposhtëm metoda katrorëve më të vegjël ka kufizimet e sajpasi jo çdo gjë në aplikime është lineare. Në qoftë se për disa të dhëna përafrojmë një model linearatëherë ky model mund të ndodh që të mos i përputhet këtyre të dhënave shumë mirë. Në shembullintjetër shohim se ndonjëherë një përafrim i tillë nuk i përputhet fare të dhënave.
Shembull 7.7. Jepen të dhënat e mëposhtme
x 1 2 3 4 5y 2 5 4 7 2
Gjej një funksion linear i cili i përshtatet sa më mirë të dhënave.
Zgjidhje: Atëherë
A :=
1 12 13 14 15 1
, dhe y =
25472
Zgjidhja e katrorëve më të vegjël është
v0 = (AT A)−1 ATy = 1
5
[1
17
]Kështu që, drejtëza që i përputhet më mirë të dhënave të mësipërme është
y = x
5+ 17
5
Grafiku në Fig. 7.1 është grafiku i të dhënave të funksionit.
Në shembullin e mësipërm gjetëm një funksion linear i cili i përputhet të dhënave sa më mirë. Gjithës-esi, metoda e katrorëve më të vegjël mund të përdoret vetëm për të gjetur funksione lineare. Më poshtëdo ta përgjithësojmë këtë metodë.
Le të jetë A një matricë m×n, v një vekor n×1 dhe y një vektor m×1. Le të kemi të dhënë ekuacionine matricës.
Av ∼= y
Zgjidhja e katrorëve më të vegjël e ekuacionit të matricës Av ∼= y është një vektor v0 i tillë që
||y−Av0|| ≤ ||y−Av||

7.2. METODA E KATRORËVE MË TË VEGJËL 169
Figura 7.1: Duke i përputhur të dhënat e mësipërme me metodën e katrorëve më të vegjël.
për çdo v.
Tani na duhet të përcaktojmë v =[
ab
]të tillë që vektori gabim Av− y është minimal. Koncepti
i minimal varet nga lloji i aplikimit. Metoda e katrorëve më të vegjël është e bazuar në faktin që nekërkojmë që magnituda ||Av−y|| të jetë minimale. Shënojmë me d := Av−y. Atëherë, di = ax +b − yi .Duke minimizuar ||Av−y|| minimizojmë ||Av−y||2, e cila minimizon
d 21 +d 2
2 +·· ·+d 2n .
Le të jenë v1 dhe v2 vektora kolonë të Asë. Vektori Av = av1+bv2 shtrihet në hapësirën W = Span (v1, v2).Ne duam të gjejmë vektorin v0 ∈ W të tillë që prodhimi skalar Av · (Av0 −y) = 0 për çdo v ∈ W. Atëherë
kemi
Av · (Av0 −y) = (Av)T (Av0 −y) = (Av)T Av0 − (Av)Ty
= vT AT Av0 −vT ATy = vT (AT Av0 −ATy
)= 0(7.8)
për çdo v ∈ W. Sepse prodhimi skalar është një prodhim i brendshëm jo-degenerate atëherë
AT Av0 −ATy = 0

170 T. Shaska
dhev0 = (AT A)−1 ATy
MatricaP := (AT A)−1 AT
quhet matrica projeksion e A-së. Vektori Av0 quhet projeksioni ortogonal i y-së në hapësirën kolonë tëA-së.
7.2.1 Metoda e katrorëve më të vegjël për polinomë me grada më të larta
Marrim në konsideratë të njëjtin problem si në seksionin e mësipërm. Gjithsesi, përafrimi që duamtë përdorim nuk është domosdoshmërisht linear, por një polinom i gradës n. Dihet se në qoftë se janëdhënë n pika në plan atëherë ekziston një polinom i gradës n i cili kalon nga këto pika, nëse pikat janëlinearisht të varura. Kështu që, për shumë aplikime kemi r pika dhe duam të gjejmë një polinom tëgradës n i cili përputhet sa më mirë me këto të dhëna për n < r . Shohim problemin:
Problem: Na është dhënë një bashkësi të dhënash
x x1 x2 x3 x4 . . . xr
y y1 y2 y3 y4 . . . yr
Tabela 7.2: Metoda e katroreve me te vegjel
Gjej një polinom të gradës n
y = f (x) = an xn +an−1xn−1 +·· ·+a1x +a0
i cili përputhet sa më mirë me këto të dhëna.
Këtë polinom mund ta shkruajmë në formën e një matrice si më poshtë:
xn1 . . . x1 1
xn2 . . . x2 1· · · ·· · · ·· · · ·
xnn . . . xn 1
an
an−1
···
a0
=
an xn1 +an−1xn−1
1 +·· ·+a1x1 +a0
an xn2 +an−1xn−1
2 +·· ·+a1x2 +a0
···
an xnn +an−1xn−1
n +·· ·+a1xn +a0
Si më sipër e shënojmë këtë si Av = y. Zgjidhja e katrorëve më të vegjël është
v0 = (AT A)−1 ATy
Shembull 7.8. Jepen të dhënat e mëposhtme si në shmebullin e mësipërm.
x 1 2 3 4 5y 2 5 4 7 2
Gjej një polinom të gradës 2 që u përshatet të dhënave sa më mirë.

7.2. METODA E KATRORËVE MË TË VEGJËL 171
Zgjidhje: Atëherë
A :=
1 1 14 2 19 3 1
16 4 125 5 1
, dhe y =
25472
Figura 7.2: Përputhim të dhënat e mësipërme me anë të metodës katrorëve më të vegjël.
Zgjidhja katrorëve më të vegjël është
v0 = (AT A)−1 ATy =
− 6
7
18735
− 135
Kështu që, polinomi i gradës së dytë që përputhet më mirë me këto të dhëna është
y =−6
7x2 + 187
35x − 13
5
Grafiku i mësipërm është grafiku i të dhënave të funksionit. Kini parasysh se marrim një përafrim më tëmirë se në rastin kur funksioni është linear.
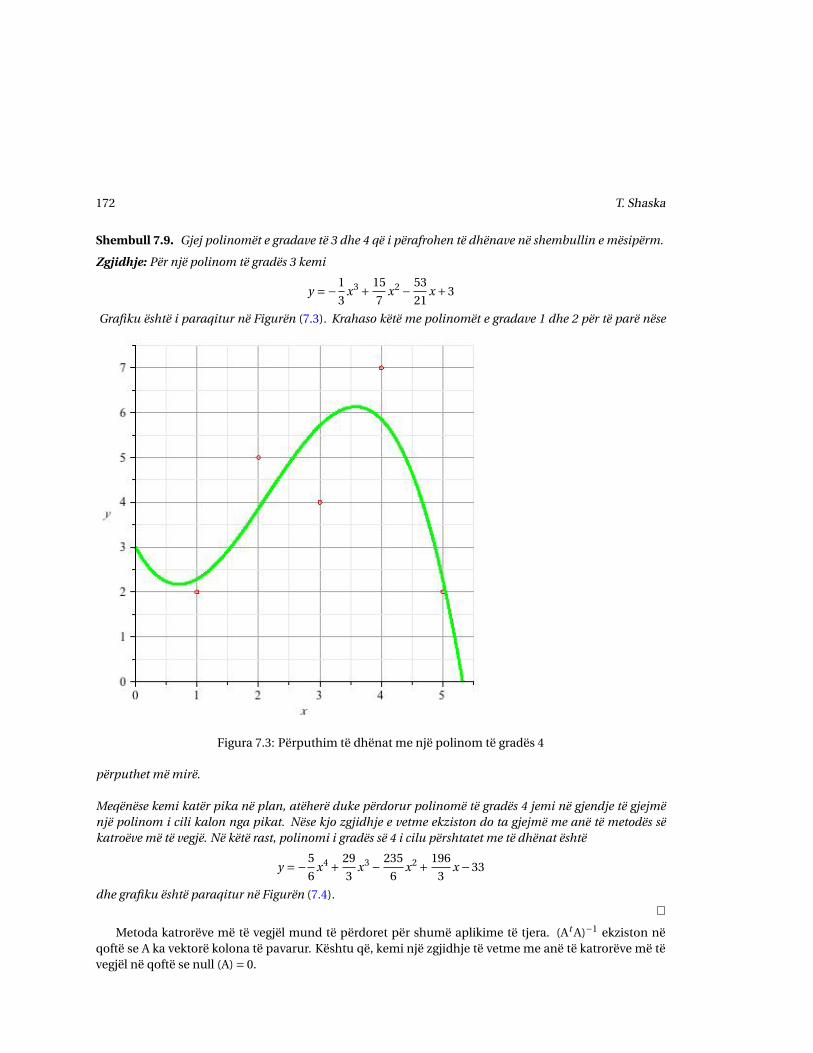
172 T. Shaska
Shembull 7.9. Gjej polinomët e gradave të 3 dhe 4 që i përafrohen të dhënave në shembullin e mësipërm.
Zgjidhje: Për një polinom të gradës 3 kemi
y =−1
3x3 + 15
7x2 − 53
21x +3
Grafiku është i paraqitur në Figurën (7.3). Krahaso këtë me polinomët e gradave 1 dhe 2 për të parë nëse
Figura 7.3: Përputhim të dhënat me një polinom të gradës 4
përputhet më mirë.
Meqënëse kemi katër pika në plan, atëherë duke përdorur polinomë të gradës 4 jemi në gjendje të gjejmënjë polinom i cili kalon nga pikat. Nëse kjo zgjidhje e vetme ekziston do ta gjejmë me anë të metodës sëkatroëve më të vegjë. Në këtë rast, polinomi i gradës së 4 i cilu përshtatet me të dhënat është
y =−5
6x4 + 29
3x3 − 235
6x2 + 196
3x −33
dhe grafiku është paraqitur në Figurën (7.4).
Metoda katrorëve më të vegjël mund të përdoret për shumë aplikime të tjera. (At A)−1 ekziston nëqoftë se A ka vektorë kolona të pavarur. Kështu që, kemi një zgjidhje të vetme me anë të katrorëve më tëvegjël në qoftë se null (A) = 0.

7.2. METODA E KATRORËVE MË TË VEGJËL 173
Figura 7.4: Përputhim të dhënat me një polinom të gradës 4
Shembull 7.10. Gjej zgjidhjen katrorëve më të vegjël për sistemin
x1 −x2 = 4
3x1 +2x2 +x3 = 33x1 +2x2 −5x3 = 1
2x1 +x2 −x3 = 3
Zgjidhje: Kemi
Ax = y
ku
A =
1 -1 03 2 13 2 -52 1 -1
, y =
4313
.

174 T. Shaska
Zgjidhja e katrorëve më të vegjël është
v0 = (At A)−1At y =
617275
−2111
29275
.
Atëherë projeksioni ortogonal i y në hapësirën kolonë të A-së është vektori Av0 i dhënë nga
Av0 =
1142275
17955
331275
12355
=
4.152727273
3.254545455
1.203636364
2.236363636
.
Ushtrime:
1. Jepen të dhënat e mëposhtmex 1 2 3 4 5y 8 13 18 23 28
Gjej funksionin linear i cili u përshtatet më mirë të dhënave.
2. Jepen të dhënat e mëposhtme
x 0 1 3 2 -2y 2 1 -1 -5 4
Gjej një funksion linear i cili u përshtatet më mirë të dhënave.
3. Gjej një polinom të gradës 2 i cili u përshtatet më mirë të dhënave të mëposhtme.:
x 0 1 3 2 5y -2 -1 2 4 2
4. Gjej një polinom të gradës 3 i cili u përshtatet më mirë të dhënave të mëposhtme.
x 0 1 3 5 -2y 2 3 5 0 -4
7.2. METODA E KATRORËVE MË TË VEGJËL 175
5. Gjej zgjidhjen e katrorëve më të vegjël të sistemitx1 −x2 = 4
3x1 +2x2 = 33x1 +2x2 = 1
6. Gjej zgjidhjen e katrorëve më të vegjël të sistemitx1 −11x2 = 1
3x1 +x3 = 2x1 +2x2 = 1
2x1 +x2 −x3 = 31
dhe projeksionin ortogonal korespondues.
7. Gjej zgjidhjen katrorëve më të vegjël të sistemit5x1 −12x2 = 4x1 +3x2 =−2
6x1 +2x2 =−1
dhe projeksionin ortogonal korespondues.
8. Gjej zgjidhjen katrorëve më të vegjël të sistemit3x1 −x2 +3x3 = 43x1 +7x2 +x3 = 3
3x1 +2x2 −x3 = 212x1 +x2 −x3 = 4
dhe projeksionin ortogonal korespondues.

176 T. Shaska

Shtesa A
Numrat kompleksë
A.1 Numrat kompleksë
Në këtë seksion do të flitet për numrat kompleksë, algjebrën e numrave kompleksë dhe interpretimingjeometrik të tyre. Përkufizime bazë dhe veti të numrave kompleksë mund të gjenden në literatura tëndryshme, shih për shembull [?alg]. Simbolet z,u, w, v shërbejnë për të treguar numrat kompleksë dhemeC është shënuar bashkësia e të gjithë numrave kompleksë. Shënojmë me i simbolin numrin që gëzoncilësinë i 2 =−1.
Përkufizim A.1. Bashkësia e numrave kompleksë, C quhet bashkësia
C := {a +bi | a,b ∈R}
Dy numra kompleksë z1 = a+bi dhe z2 = c+di janë të barabartë atëherë dhe vetëm atëherë kur a = bdhe c = d . Do të përkufizojmë shumën dhe prodhimin e dy numrave kompleks si:
(a +bi )+ (c +di ) = (a + c)+ (b +d)i
(a +bi ) · (c +di ) = (ac −bd)+ (ad +bc)i
Vërejmë se prodhimi nuk është tjetër veçse prodhimi i zakonshëm i shprehjeve algjebrike, me shtesën sei 2 =−1. Numrin real a e quajmë pjesa reale e numrit kompleks z = a+bi ndërsa numrin real b e quajmëpjesa imagjinare. I përcaktojmë ato si më poshtë:
ℜ(z) = a, ℑ(z) = b
Për çdo z ∈R kemi z =ℜ(z)+0 · i . Në qoftë se z = a+bi dhe a = 0 atëherë z quhet thjesht imagjinar. Përnjë numër kompleks të dhënë x = a +bi përcaktojmë të konjuguarin e numrit kompleks si:
z := a −bi
Pasqyrimi
C→C
z → z(A.1)
është syrjektiv, dhe quhet pasqyrimi i konjugimit kompleks. Në qoftë se z ∈ C, kemi se z është realatëherë dhe vetëm atëherë kur z = z.
177

178 T. Shaska
A.1.1 Interpretimi gjeometrik i numrit kompleks
Ne mund ta paraqesim numrin kompleks z = a +bi si një pikë në sistemin koordinativ x y , me koor-dinata (a,b). Largesa e kësaj pike nga origjina është ρ=
pa2 +b2, pra ρ= |z|. Këndi −π
2 ≤ θ≤ π2 i tillë që
tanθ= ba , quhet argument i z
Vëmë re se a = ρcosθ dhe b = ρsinθ. Prej nga:
z = ρ (cosθ+ i sinθ) .
Kjo quhet paraqitja polare e z. Paraqitjen polare të numrit kompleks e përdorim për të interpretuarprodhimin dhe pjestimin e numrave kompleks. Le të jenë z, w dy numra kompleks të çfarëdoshëm tëtillë që:
z = r1(cosα+ i sinα) dhe w = r2(cosβ+ i sinβ)
Atëherë,
z ·w = r1r2(cos(α+β)+ i sin(α+β)
)z
w= r1
r2
(cos(α−β)+ i sin(α−β)
) (A.2)
Për më tepër ka vend lema e mëposhtme:
Lema A.1. (Formula e Muavrit) Për çdo numër të plotë n ≥ 1
(cosθ+ i sinθ)n = cos(nθ)+ i sin(nθ).
Është e qartë se z = r (cosθ+ i sinθ) dhe n një numër i plotë ≥ 1 atëherë
zn = r n(cosnθ+ i sinnθ).
Do të përdorim gjithashtu Formulën e Eulerit
e iθ = cosθ+ i sinθ.
Shënojmë me εn = cos 2πn + i sin 2π
n . Duke përdorur formulën e Muavrit marrim εnn = 1. Ky numër εn
quhet rrënja e n-të primitive e njëshit. Të gjitha fuqitë e εn janë në rrethin njësi dhe kanë vetinë se kurngrihen në fuqi n japin 1. Kur nuk ka keqkuptime në lidhje me n ne thjesht shënojmë εn me ε. Dukeshumëzuar ε me veten e vet, thjesht rrotullojmë ε me një kënd prej θ = 2π
n , prej nga pas n-rrotullimeshdo të arrijmë tek pika z = (1,0).
Një numër kompleks z thuhet se ka rend n ≥ 1 në qoftë se zn = 1 dhe zm 6= 1 për të gjithë 0 < m < n.Të gjithë numrat kompleks z të rendit n quhen rrënjë primitive të njëshit.
Ushtrime:
1. Vërtetoni:i) z +w = z +wii) zw = z ·w

A.1. NUMRAT KOMPLEKSË 179
2. Vërtetoni se për çdo u, v ∈C,|u · v | = |u| · |v |.
3. Le të jenë z = r1(cosα+ i sinα) dhe w = r2(cosβ+ i sinβ). Vërtetoni se
z ·w = r1r2(cos(α+β)+ i sin(α+β)
)4. Vërtetoni formulën e Muavrit. Për çdo numër të plotë n ≥ 1
(cosθ+ i sinθ)n = cos(nθ)+ i sin(nθ)
5. Vërtetoni se për çdo numër racional r ∈Q(cosθ+ i sinθ)r = cos(rθ)+ i sin(rθ)
6. Zgjidhni ekuacioninzn −1 = 0
7. Le të jetë z = 12 + i
p3
2 . Njehsoni z2, z3, z4, z5, z7, z8, z9.
8. Shprehni numrat 3e−4πi
6 ,−3e2πi
n në formën standarte.
9. Zgjidhni ekuacionin
(z + 3
z2 )(3z2 −2z +5) = 0.
10. Faktorizoni plotësisht polinomin p(z) = z7 −1.
11. Faktorizoni nëQ polinomin p(z) = z5 −1.
12. A ka ekuacioniz4 + z3 + z2 + z +1 = 0
zgjidhje racionale?
13. A mund të shprehet f (x) = xn−1x−1 si një polinom? Cila është shprehja?
14. Llogarisni modulin e numrave kompleks:
(i +1)10, (1
2+ i
p3
2)12.
15. Jepet funksioni f (z):f :C→C
z → a z +b
c z +d,
ku ad −bc = 1. Jepet që
f (1) =−1, f (i ) = i , f (2) =−1
2
a) Gjeni f (z) dhe më pas f (2), f (2i ), f ( 12 ).
b) Le të jetëC = {z ∈C | |z| = 1,Re(z) ≥ 0}.
Gjeni f (C).

180 T. Shaska
16. Jepet funksioni f (z):f :C→C
z → a z +b
c z +d
ku ad −bc = 1. Jepet
f (i ) =−i , f (3) = 1
3, f (−1) =−1
a) Gjeni f (z) dhe më pas f (2), f (2i ), f ( 12 ).
b) Le të jetëC = {z ∈C | |z| = 2,}
rrethi me qendër në origjinë dhe me rreze 2. Gjeni f (C).
17. Shënojmë me ε5 rrënjën e pestë primitive të njëshit. Gjeni transformimin e Mobiusit f (x) të tillë që
f (0) = 0, f (1) = ε5, f (ε5) = ε25
Vërtetoni përgjigjen tuaj. Gjeni f (ε25), f (ε3
5), f (ε45).
18. Shprehni numrat 3e−4πi
6 ,−3e2πi
n në formën standarte.
19. Zgjidhni ekuacionin: zn −1 = 0.
20. Llogarisni modulin e numrave kompleks:
(i +1)10, (1
2+ i
p3
2)12.
21. Shënojmë me ε5 rrënjën e pestë primitive të njëshit. Gjeni transformimin e Mobiusit f (x) të tillë që
f (0) = 0, f (1) = ε5, f (ε5) = ε25
Vërtetoni përgjigjen tuaj. Gjeni f (ε25), f (ε3
5), f (ε45).

Bibliografia
[1] Lubjana Beshaj, Valmira Hoxha, and Tony Shaska, On superelliptic curves of level n and their quotients, I, Albanian J. Math. 5(2011), no. 3, 115–137. MR2846162 (2012i:14036)
[2] A. Bialostocki and T. Shaska, Galois groups of prime degree polynomials with nonreal roots, Computational aspects of algebraiccurves, 2005, pp. 243–255. MR2182043 (2006h:12009)
[3] A. Elezi and T. Shaska, Special issue on algebra and computational algebraic geometry, Albanian J. Math. 1 (2007), no. 4, 175–177. MR2367211
[4] , Quantum codes from superelliptic curves, Albanian J. Math. 5 (2011), no. 4, 175–191. MR2945762
[5] J. Gutierrez and T. Shaska, Hyperelliptic curves with extra involutions, LMS J. Comput. Math. 8 (2005), 102–115. MR2135032(2006b:14049)
[6] Jaime Gutierrez, D. Sevilla, and T. Shaska, Hyperelliptic curves of genus 3 with prescribed automorphism group, Computationalaspects of algebraic curves, 2005, pp. 109–123. MR2182037 (2006j:14038)
[7] Vishwanath Krishnamoorthy, Tanush Shaska, and Helmut Völklein, Invariants of binary forms, Progress in Galois theory, 2005,pp. 101–122. MR2148462 (2006b:13015)
[8] K. Magaard, T. Shaska, S. Shpectorov, and H. Völklein, The locus of curves with prescribed automorphism group,Surikaisekikenkyusho Kokyuroku 1267 (2002), 112–141. Communications in arithmetic fundamental groups (Kyoto,1999/2001). MR1954371
[9] Kay Magaard, Tanush Shaska, and Helmut Völklein, Genus 2 curves that admit a degree 5 map to an elliptic curve, Forum Math.21 (2009), no. 3, 547–566. MR2526800 (2010h:14050)
[10] N. Pjero, M. Ramasaço, and T. Shaska, Degree even coverings of elliptic curves by genus 2 curves, Albanian J. Math. 2 (2008),no. 3, 241–248. MR2492097 (2010b:14058)
[11] E. Previato, T. Shaska, and G. S. Wijesiri, Thetanulls of cyclic curves of small genus, Albanian J. Math. 1 (2007), no. 4, 253–270.MR2367218 (2008k:14066)
[12] R. Sanjeewa and T. Shaska, Determining equations of families of cyclic curves, Albanian J. Math. 2 (2008), no. 3, 199–213.MR2492096 (2010d:14043)
[13] David Sevilla and Tanush Shaska, Hyperelliptic curves with reduced automorphism group A5, Appl. Algebra Engrg. Comm.Comput. 18 (2007), no. 1-2, 3–20. MR2280308 (2008c:14042)
[14] T. Shaska, Curves of genus 2 with (N,N) decomposable Jacobians, J. Symbolic Comput. 31 (2001), no. 5, 603–617. MR1828706(2002m:14023)
[15] , Computational aspects of hyperelliptic curves, Computer mathematics, 2003, pp. 248–257. MR2061839 (2005h:14073)
[16] , Genus 2 fields with degree 3 elliptic subfields, Forum Math. 16 (2004), no. 2, 263–280. MR2039100 (2004m:11097)
[17] , Genus two curves covering elliptic curves: a computational approach, Computational aspects of algebraic curves, 2005,pp. 206–231. MR2182041 (2006g:14051)
[18] , Subvarieties of the hyperelliptic moduli determined by group actions, Serdica Math. J. 32 (2006), no. 4, 355–374.MR2287373 (2007k:14055)
[19] , Computational algebraic geometry and its applications [Foreword], Appl. Algebra Engrg. Comm. Comput. 24 (2013),no. 5, 309–311. MR3183721
[20] , Computational algebraic geometry [Foreword], J. Symbolic Comput. 57 (2013), 1–2. MR3066447
181

182 BIBLIOGRAFIA
[21] , Some remarks on the hyperelliptic moduli of genus 3, Comm. Algebra 42 (2014), no. 9, 4110–4130. MR3200084
[22] T. Shaska and L. Beshaj, The arithmetic of genus two curves, Information security, coding theory and related combinatorics,2011, pp. 59–98. MR2963126
[23] T. Shaska, W. C. Huffman, D. Joyner, and V. Ustimenko (eds.), Advances in coding theory and cryptography, Series on CodingTheory and Cryptology, vol. 3, World Scientific Publishing Co. Pte. Ltd., Hackensack, NJ, 2007. Papers from the Conferenceon Coding Theory and Cryptography held in Vlora, May 26–27, 2007 and from the Conference on Applications of ComputerAlgebra held at Oakland University, Rochester, MI, July 19–22, 2007. MR2435341 (2009h:94158)
[24] T. Shaska and M. Qarri, Algebraic aspects of digital communications, Albanian J. Math. 2 (2008), no. 3, 141–144. MR2495805
[25] T. Shaska and C. Shor, Codes over Fp2 and Fp ×Fp , lattices, and theta functions, Advances in coding theory and cryptography,
2007, pp. 70–80. MR2440170 (2010a:94120)
[26] T. Shaska, C. Shor, and S. Wijesiri, Codes over rings of size p2 and lattices over imaginary quadratic fields, Finite Fields Appl. 16(2010), no. 2, 75–87. MR2594505 (2011b:94059)
[27] T. Shaska and F. Thompson, Bielliptic curves of genus 3 in the hyperelliptic moduli, Appl. Algebra Engrg. Comm. Comput. 24(2013), no. 5, 387–412. MR3118614
[28] T. Shaska and V. Ustimenko, On the homogeneous algebraic graphs of large girth and their applications, Linear Algebra Appl.430 (2009), no. 7, 1826–1837. MR2494667 (2010a:05103)
[29] T. Shaska and G. S. Wijesiri, Codes over rings of size four, Hermitian lattices, and corresponding theta functions, Proc. Amer.Math. Soc. 136 (2008), no. 3, 849–857. MR2361856 (2008m:11132)
[30] , Theta functions and algebraic curves with automorphisms, Algebraic aspects of digital communications, 2009, pp. 193–237. MR2605301 (2011e:14057)
[31] T. Shaska, G. S. Wijesiri, S. Wolf, and L. Woodland, Degree 4 coverings of elliptic curves by genus 2 curves, Albanian J. Math. 2(2008), no. 4, 307–318. MR2470579 (2010b:14064)
[32] Tanush Shaska, Determining the automorphism group of a hyperelliptic curve, Proceedings of the 2003 International Sympo-sium on Symbolic and Algebraic Computation, 2003, pp. 248–254 (electronic). MR2035219 (2005c:14037)
[33] , Some special families of hyperelliptic curves, J. Algebra Appl. 3 (2004), no. 1, 75–89. MR2047637 (2005i:14028)
[34] (ed.), Computational aspects of algebraic curves, Lecture Notes Series on Computing, vol. 13, World Scientific PublishingCo. Pte. Ltd., Hackensack, NJ, 2005. Papers from the conference held at the University of Idaho, Moscow, ID, May 26–28, 2005.MR2182657 (2006e:14003)
[35] , Some open problems in computational algebraic geometry, Albanian J. Math. 1 (2007), no. 4, 297–319. MR2367221(2008k:14108)
[36] Tanush Shaska and Engjell Hasimaj (eds.), Algebraic aspects of digital communications, NATO Science for Peace and SecuritySeries D: Information and Communication Security, vol. 24, IOS Press, Amsterdam, 2009. Papers from the Conference “NewChallenges in Digital Communications” held at the University of Vlora, Vlora, April 27–May 9, 2008. MR2605610 (2011a:94002)
[37] Tanush Shaska and Jennifer L. Thompson, On the generic curve of genus 3, Affine algebraic geometry, 2005, pp. 233–243.MR2126664 (2006c:14042)
[38] Tanush Shaska and V. Ustimenko, On some applications of graphs to cryptography and turbocoding, Albanian J. Math. 2 (2008),no. 3, 249–255. MR2495815 (2010a:05102)
[39] Tanush Shaska and Helmut Völklein, Elliptic subfields and automorphisms of genus 2 function fields, Algebra, arithmetic andgeometry with applications (West Lafayette, IN, 2000), 2004, pp. 703–723. MR2037120 (2004m:14047)
[40] Tanush Shaska and Quanlong Wang, On the automorphism groups of some AG-codes based on Ca,b curves, Serdica J. Comput.1 (2007), no. 2, 193–206. MR2363086 (2008m:94029)
[41] Tanush Tony Shaska, Curves of genus two covering elliptic curves, ProQuest LLC, Ann Arbor, MI, 2001. Thesis (Ph.D.)–Universityof Florida. MR2701993
[42] Tony Shaska, Genus 2 curves with (3,3)-split Jacobian and large automorphism group, Algorithmic number theory (Sydney,2002), 2002, pp. 205–218. MR2041085 (2005e:14048)
[43] Helmut Voelklein and Tanush Shaska (eds.), Progress in Galois theory, Developments in Mathematics, vol. 12, Springer, NewYork, 2005. MR2150438 (2006a:00014)