Algebraic geometry in systems biology - folk.uio.nofolk.uio.no/ranestad/Laubenbacher.pdfAll discrete...
28
Algebraic geometry in systems biology Reinhard Laubenbacher Virginia Bioinformatics Institute and Mathematics Department Virginia Tech [email protected] Reinhard Laubenbacher Algebraic geometry in systems biology
Transcript of Algebraic geometry in systems biology - folk.uio.nofolk.uio.no/ranestad/Laubenbacher.pdfAll discrete...

Algebraic geometry in systems biology
Reinhard Laubenbacher
Virginia Bioinformatics Instituteand
Mathematics DepartmentVirginia Tech
Reinhard Laubenbacher Algebraic geometry in systems biology

Polynomial dynamical systems
Let x1, . . . , xn be variables with values in a finite field F.
DefinitionA polynomial dynamical system (PDS) over F of dimension n isa time-discrete dynamical system
f = (f1, . . . , fn) : Fn −→ Fn,
with fi ∈ F[x1, . . . , xn].
Reinhard Laubenbacher Algebraic geometry in systems biology

Example
Let f = (x7, x1x3, x4, x5, x6, x7, x2) : F72 −→ F7
2.
Structure Dynamics
Reinhard Laubenbacher Algebraic geometry in systems biology

Systems biology
The advent of functional genomics has enabled the molecularbiosciences to come a long way towards characterizing themolecular constituents of life. Yet, the challenge for biologyoverall is to understand how organisms function. By discoveringhow function arises in dynamic interactions, systems biologyaddresses the missing links between molecules and physiology.
Bruggeman, Westerhoff, 2006
Reinhard Laubenbacher Algebraic geometry in systems biology

The biology
Hannahan and Weinberg (2000) The hallmarks of cancer
Reinhard Laubenbacher Algebraic geometry in systems biology

Dynamic Model:Collection of variables x1, . . . , xn with states in setsX1, . . . ,Xn;Collection of relationshipsR1(x1, . . . , xn), . . . ,Rn(x1, . . . , xn);Scheme to update the state of each of the variables overtime.
The Xi can be R, Fq, or any other set, such as{active, inactive}.The Ri can be ODEs, logical rules, stochasticrelationships, etc.Update can be in continuous or discrete time.
Reinhard Laubenbacher Algebraic geometry in systems biology

Discrete models
Assumptions:The Xi are finite sets;The Ri are given as functions fi : X = X1 × · · · × Xn −→ Xi ;Dynamics is generated by iteration of the function
f = (f1, . . . , fn) : X1 × · · · × Xn −→ X1 × · · · × Xn.
Reinhard Laubenbacher Algebraic geometry in systems biology

Example
Reinhard Laubenbacher Algebraic geometry in systems biology

Example cont.
Let Xi = {0,1} for all i .
fMcI = xCIT ∨ xCroT ∨ (xMcI ∧ xMcIold)
fMcIold= xCIT ∧ xCroT
xMcI1= xMcI
fMcro = xCIT ∨ (xMcro ∧ xMcroold)
fMcroold = xCIT
xMcro1= xMcro
xMcro2= xMcro1
fCIT = γcI1 ∨ (γcIhigh ∧ (xMcI1∨ (xCIT ∧ (xCIT old
∨ γcI))))
Reinhard Laubenbacher Algebraic geometry in systems biology

Example cont.
fCIT old= xMcI1
∨ γcIhigh
fCroT = xMcro2∨ (xCroT ∧ xCroT old
)
fCroT old= xMcro2
fγcI = γcI ∨ γcIhigh
fγcI1= γcI
fγcIhigh= γcIhigh .
from F. Hinkelmann and R.L., Boolean models of bistablesystems, Discr. Cont. Dyn. Syst., 2010, in press.
Reinhard Laubenbacher Algebraic geometry in systems biology

Model types
Boolean networks;Logical models;Bounded Petri nets;Agent-based models.
All discrete deterministic models of this type can be translatedinto the framework of polynomial dynamical systems over afinite field:
F. Hinkelmann, D. Murragarra, A. Jarrah, and R. L., Amathematical framework for agent-based models ofcomplex biological networks, Bull. Math. Biol., 2010, inpress.A. Veliz-Cuba, A. Jarrah, R. L., Polynomial Algebra ofDiscrete Models in Systems Biology, Bioinformatics, 26,1637-1643, 2010.
Reinhard Laubenbacher Algebraic geometry in systems biology

What the experimentalist needs
Tools to construct models.Tools to analyze models.Tools to use models to generate biological hypotheses anddiscover new biology.
Goal: Provide algorithms and software for all three. Do it insuch a way that the biologist becomes independent of themodeler.
Reinhard Laubenbacher Algebraic geometry in systems biology

Tools to construct models
Most important tool for ODEs is parameter estimation.Need analogous tool for discrete models.
parameters = unknown coefficients in the polynomials fi .
Choose parameter values by fitting the model to time coursesof experimental data.E. Dimitrova, L.D. Garcia, F. Hinkelmann, A. Jarrah, R.L., B.Stigler, M. Stillman, P. Vera-Licona, Parameter estimation forBoolean models, J. Theor. Comp. Sci. 2010, in press.
Reinhard Laubenbacher Algebraic geometry in systems biology

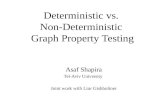
Parameter estimation
Input Functions (Optional)
Upload function file: Browse… what is this?
OR (Edit functions below)
f1 = x1
Input Data
Upload data file: Browse… what is this?
OR (Edit data below)
# First time course 1.2 2.3 3.41.1 1.2 1.32.2 2.3 2.40.1 0.2 0.3
Polynome: Discrete System Identification
If this is your first time, please read the tutorial. It is important that you follow the format specified in the tutorial.Make your selections and provide inputs (if any) in the form below and click Generate to run the software.
Input SpecificationType of Data
Number of nodes: 3 what is this?
Type of Model what is this?
Select the type of polynomial dynamical system to be generated: Stochastic Deterministic
Type of Simulation what is this?
Simulate the state space using an update schedule?
Enter update schedule separated by spaces
If none is entered, then the nodes will be simulated in parallel.
Output Options
Select output to view and file format. what is this?
Show discretized data
Wiring Diagram *.gif Print probabilities in wiring diagram
Show functions for Polynomial dynamical system
State space graph *.gif Print probabilities in state space
Generate
Output will be displayed below. Note: Computation time depends on data size and internet connection.
Reinhard Laubenbacher Algebraic geometry in systems biology

Tools to analyze models
Computation of model dynamics: steady states and limit cycles.
Letf = (f1, . . . , fn) : kn −→ kn
be a PDS. Let a ∈ kn. Then a is a periodic point of f of period tif f t(a) = a. That is:
f t1(a)− a = 0, . . . , f t
n(a)− a = 0.
For small values of n, the entire phase space of the model canbe computed by exhaustive enumeration of all transitions. Forlarge n use computer algebra.
Reinhard Laubenbacher Algebraic geometry in systems biology

Dynamics
ADAM – Analysis of Dynamic Algebraic Models h6p://dvd.vbi.vt.edu
F. Hinkelmann, M. Brandon, B. Guang, R. McNeill, G.Blekherman, A. Veliz-Cuba, and R.L., ADAM: Analysis ofdiscrete models of biological systems using computer algebra,2010, under review.
Reinhard Laubenbacher Algebraic geometry in systems biology

Benchmarks
Reinhard Laubenbacher Algebraic geometry in systems biology

Example
T cell differentiation
From A. Naldi et al., Diversity and plasticity of Th cell typespredicted from regulatory network modelling, PLoS Comp.Biol., 2010.
Reinhard Laubenbacher Algebraic geometry in systems biology

Tools to use models for hypothesis generation
Example: Optimal control for drug therapy
From O. Sahin et al., Modeling ERBB receptor-regulated GI/Stransition to find novel targets for de novo trastuzumabresistence, BMC Sys. Biol. 3, 2009
Reinhard Laubenbacher Algebraic geometry in systems biology

Optimal control for PDS
A controlled PDS (Marchand et al. 1998, On optimal control ofPDS over Z/pZ) is given by
f : Fn × Fm −→ Fn,
with state variables x1, . . . , xn and control variablesu1, . . . ,um.Variety of admissible control inputs:
Qi(x1, . . . , xn; u1, . . . ,um) = 0, i = 1, . . . , r ,
Variety of admissible initial states:
Pj(x1, . . . , xn) = 0, j = 1, . . . , s,
Variety of admissible final states:
Ua(x1, . . . , xn) = 0, a = 1, . . . , t ,
Reinhard Laubenbacher Algebraic geometry in systems biology

Optimal control cont.
Let X0 be the variety of admissible initializations:
X0 = {x ∈ Fn : Pj(x) = 0, j = 1, . . . , s}
and XM be the variety of final states:
XM = {x ∈ Fn : Ua(x) = 0, a = 1, . . . , t}
XM−1 = {x ∈ Fn : ∃ u,Qi(x; u) = 0, i = 1, . . . , r ⇒ f (x; u) ∈ XM}
XM−2 = {x ∈ Fn : ∃ u,Qi(x; u) = 0, i = 1, . . . , r ⇒ f (x; u) ∈ XM−1}
Reinhard Laubenbacher Algebraic geometry in systems biology

Optimal control cont.
A valid control sequence of the system is a sequence of controlinputs {u1, . . . ,uM} which drives the system from one of theinitial states to one of the final states:
x1 //
u2
!!BBB
BBBB
B ◦ // . . . //
##
◦
##x0 //
!!
u1==||||||||◦ //
!!
x2 //
==
u3
!!DDDD
DDDD
D. . . // xM−1
uM // xM
◦ // ◦ //// . . .
uM−1;;wwwwwwwww // ◦
;;
X0 X1 X2 . . . XM−1 XM
Reinhard Laubenbacher Algebraic geometry in systems biology

Optimal control cont.
Problem: Given a controllable system F and an initializationX0. Find a sequence of control inputs which drive the system toan admissible final state XM , in such a way that a given costfunction is minimized.The cost of a trajectory {x0,x1, . . . ,xM} with associated controlsequence Su = {u1, . . . ,uM} is given by a function:
C(Su) =M∑
i=1
c(xi−1,xi ,ui)
where c(xi−1,xi ,ui) is the cost of going from xi−1 to xi by usingthe control input ui .
Reinhard Laubenbacher Algebraic geometry in systems biology

Optimal control cont.
There exist algorithms using dynamic programming to solvethis problem, but with high combinatorial complexity.
See algorithm by H. Marchand:http://www.irisa.fr/vertecs/Softwares/sigali.html
Computer algebra is used to efficiently compute the Xi .
For large problems heuristic algorithms are needed.
Reinhard Laubenbacher Algebraic geometry in systems biology

Future work
More analysis tools;New algorithms;Theoretical results;New optimal control algorithms (NIMBioS working group);A better interface for the biologist user;Integration of the different software packages;Stochastic systems.
Reinhard Laubenbacher Algebraic geometry in systems biology

Theoretical results: example
Study a special class of functions that appears frequently as arule for molecular regulation: nested canalyzing polynomials
Most rules in published models are of this type.Systems constructed from them have the “right” dynamicproperties.The family of nested canalyzing polynomials can beparametrized by binomials.This leads to a closed formula for the number of suchpolynomials.
D. Murragarra and R.L., Regulatory motifs in molecularinteraction networks, 2011, under review.
D. Murragarra and R.L., Nested canalyzing polynomials andgene regulation, 2011.
Reinhard Laubenbacher Algebraic geometry in systems biology

Contributors and Funding
Contributors: G. Blekherman, M. Brandon, E. Dimitrova, L.Garcia, B. Guang, F. Hinkelmann, A. Jarrah, R. McNeill, D.Murragarra, B. Stigler, M. Stillman, A. Veliz-Cuba, P.Vera-Licona.
Funding: NSF, ARO
Reinhard Laubenbacher Algebraic geometry in systems biology

Bull. Math. Biol. April 2011 special issue:
Algebraic Methods in Mathematical Biology
Reinhard Laubenbacher Algebraic geometry in systems biology