AIAA2004054 - Auburn University
19
AIAA 2004-4054 Nonlinear Rocket Motor Stability Prediction: Limit Amplitude, Triggering, and Mean G. A. Flandro, S. R. Fischbach and J. Majdalani Advanced Theoretical Research Center University of Tennessee Space Institute For permission to copy or republish, contact the copyright owner named on the first page. For AIAA-held copyright, write to AIAA, Permissions Department, 1801 Alexander Bell Drive, Suite 500, Reston, VA 20191-4344. Propulsion Conference and Exhibit 11–14 July 2004 Fort Lauderdale, FL
Transcript of AIAA2004054 - Auburn University

AIAA 2004-4054Nonlinear Rocket Motor Stability Prediction:Limit Amplitude, Triggering, and Mean G. A. Flandro, S. R. Fischbach and J. MajdalaniAdvanced Theoretical Research CenterUniversity of Tennessee Space Institute
For permission to copy or republish, contact the copyright owner named on the first page. For AIAA-held copyright,write to AIAA, Permissions Department, 1801 Alexander Bell Drive, Suite 500, Reston, VA 20191-4344.
Propulsion Conference and Exhibit11–14 July 2004
Fort Lauderdale, FL

40th AIAA/ASME/SAE/ASEE Joint Propulsion Conference and Exhibit AIAA 2004-405411-14 July 2004, Fort Lauderdale, Florida
–1–American Institute of Aeronautics and Astronautics.
Copyright © 2004 by G. Flandro, S. Fischbach, J. Majdalani and J. French. Published by American Institute of Aeronautics and Astronautics,Inc., with permission.
Nonlinear Rocket Motor Stability Prediction:Limit Amplitude, Triggering, and Mean Pressure Shift
Gary A. Flandro*, Sean R. Fischbach,† and Joseph Majdalani‡University of Tennessee Space Institute, Tullahoma, TN 37388
andJonathan C. French§
Software and Engineering Associates, Inc., Carson City, NV 89701
High-amplitude pressure oscillations in solid propellant rocket motor combustion cham-bers display nonlinear effects including: 1) limit cycle behavior in which the fluctuations maydwell for a considerable period of time near their peak amplitude, 2) elevated mean chamberpressure (DC shift), and 3) a triggering amplitude above which pulsing will cause an appar-ently stable system to transition to violent oscillations. Along with the obvious undesirablevibrations, these features constitute the most damaging impact of combustion instability onsystem reliability and structural integrity. The physical mechanisms behind these phenom-ena and their relationship to motor geometry and physical parameters must, therefore, befully understood if instability is to be avoided in the design process, or if effective correctivemeasures must be devised during system development. Predictive algorithms now in usehave limited ability to characterize the actual time evolution of the oscillations, and they donot supply the motor designer with information regarding peak amplitudes or the associatedcritical triggering amplitudes. A pivotal missing element is the ability to predict the meanpressure shift; clearly, the designer requires information regarding the maximum chamberpressure that might be experienced during motor operation. In this paper, a comprehensivenonlinear combustion instability model is described that supplies vital information. The cen-tral role played by steep-fronted waves is emphasized. The resulting algorithm providesboth detailed physical models of nonlinear instability phenomena and the critically neededpredictive capability. In particular, the true origin of the DC shift is revealed.
Nomenclature
a0 Mean speed of sound
e Oscillatory energy density
E Time-averaged oscillatory system energy
Em
2 Normalization constant for mode m
km Wave number for axial mode m
L Chamber length
*Boling Chair Professor, Department of Mechanical and
Aerospace Engineering. Associate Fellow AIAA.†Graduate Assistant, Department of Mechanical, Aerospace
and Biomedical Engineering. Student Member AIAA.‡Jack D. Whitfield Professor of High Speed Flows, De-
partment of Mechanical, Aerospace and Biomedical Engi-neering. Member AIAA.
§ Senior Research Engineer. Member AIAA.
m Mode number
M Reference Mach number in chamber n Outward pointing unit normal vector
p Oscillatory Pressure
P Mean chamber pressure r Radial position R Chamber radius
S Strouhal Number /mbkM
t Time u Oscillatory velocity vector z Axial position
Greek! Growth rate! Inverse square root of the acoustic Reynolds
number, ! / a0R
! Ratio of specific heats

–2–American Institute of Aeronautics and Astronautics.
! Wave amplitude! Kinematic viscosity, µ / !! Density
! Unsteady vorticity amplitude! Mean vorticity amplitude
Subscripts
b Combustion zone m Mode number
Superscripts* Dimensional quantity~ Vortical (rotational) part^ Acoustic (irrotational) part( r ), ( i ) Real and imaginary parts(1) Indicates first-order accuracy
I. IntroductionOMBUSTION instability in solid propellant rocketmotors is frequently associated with sonic waves,
since measured frequencies are closely approximatedby simple acoustic theory. For this reason, analyticalwork aimed at providing physical insight into the phe-nomenon is, quite naturally, founded upon the notion ofperturbed acoustic waves.1-10 All predictive codes arebuilt upon these concepts.2-4,7-20 This includes the SSP(Standard Stability Prediction program) now used al-most universally in treating instability problems. Mostsuch predictive algorithms represent only the linearfeatures of the instability, and provide no informationregarding important nonlinear features of great practicalsignificance.
A typical SSP calculation yields only a set of growthrates based on the underlying linear theory. Usuallythese are net growth rates for each acoustic mode andburn time selected by the analyst. If, for example, all ofthese are found to be negative, then the system isdeemed to be stable. If one (or more) is positive, theuser interprets this to mean that there is a potential in-stability problem. That is, there may be a tendency forthe motor to oscillate. No information is forthcomingregarding what amplitude such oscillations are likely toattain, or whether or not the system is susceptible totriggered instability initiated by random or deliberatepulsing.
The limit cycle, or peak amplitude reached by theoscillations, is obviously an important quantity since itreflects the vibration environment produced by the in-stability. Attempts have been made to understand thislimiting behavior of the wave system by including non-linear corrections that extend the linear acoustic insta-bility theories.5,6,8,21-26 These efforts have been useful indemonstrating certain essential physical phenomena,such as the natural steepening mechanism that causesinitially low-amplitude acoustic waves to transition into
shock-like structures.6,21,23,24,27-29 The central role playedby shock waves in nonlinear longitudinal mode com-bustion instability has also been convincingly demon-strated experimentally.30
More importantly, no information is provided re-garding the much dreaded DC shift, or mean pressureexcursion that often accompanies finite-amplitude os-cillations. It is curious that although the DC shift was,historically, the first observed sign of combustion insta-bility, its true origin and its exact nature have neverbeen successfully established.14,31,32 Therefore, consid-erable attention is devoted in this paper to rectifyingthis situation. In particular we seek to understand indetail its obvious connection to the oscillatory gas mo-tions and the controlling factors in terms of chambergeometry and physical parameters.
In this paper we apply a new set of analytical toolsthat have evolved from many decades of struggle withthe solid propellant rocket combustion instability prob-lem. Recent work by the present authors has led toconsiderable progress in the development and refine-ment of predictive capability. To be useful, such toolsmust go far beyond the usual linear growth rate calcu-lations. To be complete, the analysis must account for:
• Steep-fronted, shocked pressure waves
• Effects of rotational flow interactions
• Combustion coupling effects
• Mean pressure shift and its coupling with theoscillatory flow field.
Each of these elements receives due considerationin the approach detailed in this and companion pa-pers.33,34 Application of the new analysis in prediction,diagnosis and correction of solid rocket motor behavioris described in detail. Its validity will be tested bycomparing results to experimental data from severalprevious studies14,31,32,35-38 to be described in the nextsection.
II. Experimental ObservationsThis section highlights nonlinear combustion insta-
bility attributes as they appear in experimental data.The shortcomings of the linearized analytical tools willbecome quite apparent. Research teams have almostuniversally understood the importance of the nonlinearfeatures so clearly portrayed in test data. This has mo-tivated some excellent work in extending the analyticalbasis and also in devising improved experimental tech-niques to take advantage of the richer set of data whennonlinearity is present. What is presented here is ofnecessity limited to a few key cases; there have, ofcourse, been major contributions by many other inves-tigators.
C

–3–American Institute of Aeronautics and Astronautics.
Figure 1 depicts typical nonlinear combustion in-stability effects in a combustor undergoing high-amplitude pressure fluctuations. Data from a pressuregauge with low frequency resolution is depicted in Fig.2a); both the DC pressure rise and the limit cycle areclearly in evidence. Figure 2b shows the correspondingwaveform measured by high-frequency instrumenta-tion. The steep-fronted nature of the wave is evident.Although this is a shock-like unsteady flow, the meas-ured frequency is closely matched by the first longitu-dinal acoustic mode. The spectrum is illustrated in Fig.2c. The first peak is the 1L (first longitudinal) acousticfrequency, and subsequent peaks correspond to theharmonics. The practiced solid motor combustion in-stability analyst could easily be convinced that the datashown is from an unstable tactical motor firing. How-ever, it happens that this data is from an unstable liquidengine preburner.34 It is used here to point out the im-portant fact that all of the nonlinear features we seek tounderstand can be found in many types of combustorsand industrial burners. Companion papers39,40 describethe nonlinear behavior observed in liquid rocket en-gines. The reader should note that there is much poten-tial benefit in a parallel treatment of these difficultproblems since there is so much commonality. Unfor-tunately there has been little transfer of knowledge be-tween the liquid, solid, and jet engine research commu-nities that deal with combustion instability developmentproblems.
Fig. 1 Nonlinear instability effects.39
A. Nonlinear T-Burner Experiments
We begin with a short description of some excel-lent work conducted by Jensen and Beckstead35 in theirattempt to better characterize nonlinear features seen inT-burner test results. Curiously, this very promisingtechnique was never adopted by the solid rocket indus-try, and even more distressing, with but one notableexception,23 the combustion instability research com-munity seems to have overlooked it completely.
The reader is reminded that a crucial parameter inthe analysis of solid motor instability is the burningsurface response function or admittance function. Dueto the complexity of the unsteady combustion processesin solid propellants, it is still necessary to determine theresponse function experimentally. Thus, any predictiveeffort is only as good as the burner data and data reduc-tion used to characterize the propellant. The T-burnerhas been the most successful device used for securingthis vital information. However, the data is usuallyreduced using only the linear stability model although,as we shall demonstrate, there is much evidence thatnonlinear effects are present that render the linear inter-pretation suspect.
Jensen35 focused on the limit cycle behavior seen inburner data, and attempted to take it into account whenextracting response function data. Little was known atthe time of mechanisms leading to amplitude limiting,so Jensen assumed that nonlinear particle dampingmight account for the observations. Figure 2 showstypical pressure data taken in the experimental program.The most successful approach to representing this datawas to assume that the rate of change of the fluctuatingpressure amplitude, dR/dt, is a simple nonlinear func-tion of the amplitude, R. Jensen wrote:
1
R
dR
dt= ! + "R (1)
where ! is the linear growth rate, and " represents the
Fig. 2 Transition to limit cycle in T-burner.35

–4–American Institute of Aeronautics and Astronautics.
effects of nonlinear damping. The solid line in Fig. 2 isa plot of an optimized curve fit of Eq. (1) to the datapoints shown. The fit is excellent, apparently indicatingthat although Eq. (1) was based on an ad hoc “nonlinearoscillator” analytical approach, it clearly reflects theactual nonlinear mechanisms governing the system be-havior. Note that a distinct limit amplitude appears,and this is related to the coefficients by means of thesimple correlation
! =
" f
R# P= $ P
f(2)
which is found from Eq. (1) by assuming that limitingtakes place when the amplitude no longer changes withtime. The frequency f and mean pressure P are used tonondimensionalize the several groups of terms. It wasfound that the quantity ! (symbol # used in Ref. 35)was very nearly a constant for many sets of data. Itsnumerical value was in the neighborhood of 0.5. Pleasenote that in this model, both the linear growth rate !and nonlinear coefficient " are regarded as unknownparameters to be found from the experimental data asdescribed. Assuming that the linear growth rate is cor-rectly represented in this way, its value could then beused to deduce the propellant response function.
In a later study Flandro23 demonstrated that the !correlation agreed very well with an explicit nonlineardamping mechanism representing a shock-limited non-linear wave. The energy loss due to a steep wave frontwas found to be the major nonlinear damping effectrather than particle damping or nonlinear combustion.It was discovered that this shock mechanism agreedquite well with the measurements; the equivalent of theparameter " was calculated explicitly by using only thegas properties and the chamber speed of sound. Thisconvergence of analysis and experiment guides much ofwhat will be described in later sections of this paper.The following subsections describe additional observa-tions that demonstrate in several other ways the centralimportance of shock waves in nonlinear instability.
B. Resonating Gas Columns with Shock Waves
In a classical experiment, Saenger41 demonstratedin a simple laboratory device every feature of solidrocket motor instability. A piston oscillating at the firstmode acoustic frequency drove a periodic shock wavetraveling back and forth in a tube. The tube length was11 ft. and the piston displacement was only 1/8 in.Pressure measurements established that although thefrequency agreed with acoustic standing wave theory,the wave was steep-fronted. For the present discussion,the most important feature of this experiment was theobservation of a net change in the pressure in the closedpipe. This is in every respect analogous to the DC shiftaccompanying resonant oscillations in unstable rockets.
In other words, the mechanism driving the steep wavessimultaneously leads to a mean pressure shift. This isvery useful information and, as we will demonstrate,fully supports the physical mechanism to be set forth ina later section that illuminates the origin of the DC shiftin nonlinear rocket instability.
C. Brownlee’s Nonlinear Instability Experiments
In several research programs, beginning with hisPh.D. research work at Caltech (guided by Dr. F. E.Marble and carried out at the Jet Propulsion Labora-tory), Brownlee confronted most of the problems wefocus on here. Motors fired in these tests closely re-sembled what are now described as “tactical” rocketmotors.16,17,42 The motors were clearly unstable withoutpulsing. Oscillations became evident only after whatBrownlee described as a delay time. Figure 3 showstypical data with a delay time of about 0.5 seconds. Italso shows Brownlee’s mysterious break correspondingto the apparent cessation of growth. We will show laterthat the time delay is the time required for the initialgrowth of the oscillations from naturally occurringnoise. The “break” simply represents the point at whichthe oscillations reach their limit cycle amplitude.
Of great significance was the observation that a DCpressure rise always accompanied the oscillations whenthese grew to measurable amplitude. Figure 3 showstypical data. Notice that both the mean and oscillatingpressure grow and decay in exact correspondence. Thisis an important clue suggesting the intimate connectionbetween these two nonlinear combustion instabilityphenomena.
All observations of type described must be cap-tured analytically if useful predictive tools are toemerge. A task to be accomplished when time permitswill be interpretation of Brownlee’s excellent set ofdata using the new analytical methods to be discussedhere. It would be worthwhile to devote a similar effortto other combustion instability data archives.
Fig. 3 Mean and oscillating pressure.17

–5–American Institute of Aeronautics and Astronautics.
D. Brownlee’s Shockwave Observations
In several carefully executed experiments, Brown-lee demonstrated the importance of steep-fronted wavesin solid rocket instability. Pressure histories measuredin pulsed longitudinal instability clearly indicate thattraveling shock-like waves characterize the nonlineargas motions.16 Following up with a later study he suc-ceeded in photographically capturing the travelingshock fronts using a windowed motor and the schlierenoptical technique. A unique feature of the experimentswas that both the propellant burning surface and theshock front could be photographed simultaneously.Brownlee felt that “… the interaction of the shock frontwith processes local to the burning surface should pro-duce profound effects.”30 Recent work in liquid rocketinstability by the present writer also suggests effectsakin to detonation-type interactions between the steepwave system and the combustion processes.39,40
E. Blomshield’s Tactical Motor Tests
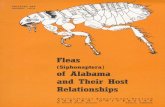
An extensive data set employing full-scale pulsedtactical rockets was secured in a series of highly in-strumented firings.36 These exhibited the classical at-tributes of nonlinear combustion instability. Data re-duction was accomplished by means of the SSP algo-rithm. Figure 4 shows the resulting correlation of themeasured growth rates to SSP predictions. Data pointson the left represent decaying pulses; those on the rightwere growing pulses. Note that exact agreement be-tween the theory and experimental data is indicatedwhen the data point lies on the diagonal line.
-300
-200
-100
0
100
200
300
-300 -200 -100 0 100 200 300
Star Aft (66.8")Star Aft (33.4")Star Fwd. (66.8")Star Fwd. (33.4")Star (66.8")Cylinder (66.8")Cylinder (33.4")
Pred
icte
d gr
owth
rat
e, !
(se
c-1)
Measured growth rate, ! (sec-1)
Full-length star
LESSSTABLE
MORESTABLE
! = +639 sec-1
Fig. 4 Measured vs. theoretical growth rates.36
It is distressing that instability was never predictedby SSP; all points are placed in Fig. 4 on the negativeside in terms of predicted growth rate. When data fromfirings that exhibited decaying pulses were compared tothe SSP predictions, it was felt that acceptable agree-ment had been demonstrated. The authors wrote “…inall cases the trends in measured instability were con-firmed by the Standard Stability Program.” However,the growing pulses indicated extremely poor agreement.The reason for this discrepancy seems clear: decayingpulses correspond to tests where negative net growthrates prevail. Therefore, as oscillations decay, theytend to approach amplitudes sufficiently small to be-have in a nearly linear fashion. On the other hand,growing pulses rapidly reach amplitudes dominated bynonlinearity. It must be pointed out that, even for de-caying pulses, there is strong evidence that nonlineareffects control the gas motions. Predictive capability ofSSP indicated on the left side of Fig. 4 is not accept-able. Nonlinear data reduction of the sort described inthe work by Jensen and Beckstead35 is called for here.
Of even greater concern is that the linear theorydoes not predict the positive growth rates when pulsingleads to growing disturbances; these are correctly char-acterized as triggered instabilities. However, there is asubtle implication that there must be some basic differ-ence between motors with growing pulses and thosethat decay. We will show later that this is simply re-lated to conditions leading to positive linear growthrates. That is, these motors are made susceptible topulsing because (despite the predictions of stabilityfrom the SSP) they must be linearly unstable systems.The important message here is that there is somethingamiss with SSP.
The Blomshield data displays all of the attributesof nonlinear behavior that were discussed in the intro-duction. The spectra corresponding to growing oscilla-tions are rich in harmonics indicating a steepened wavestructure. The DC pressure shift is closely correlatedwith the growth in the oscillations, and a distinct limitcycle is observed. Clearly, if such nonlinear instabilityis to be understood, a prerequisite must be a valid linearapproximation on which to build. This theme guidesthe work described herein.
For emphasis, all motor configurations in this testseries were predicted to be stable as indicated by allpoints in Fig. 4 lying in the lower half of the graph.Therefore, it is the opinion of the authors that lineartheory fails in accounting for Blomshield’s measure-ments. We are challenged to find the nonlinear ele-ments needed to explain these discrepancies in an un-derstandable yet physically and mathematically soundmanner. What is required is the ability to fully predictevery feature displayed in this excellent set of data. Inlater sections we will demonstrate considerable pro-gress in this undertaking.

–6–American Institute of Aeronautics and Astronautics.
III. AnalysisClassical analyses are based on the assumption of a
system of irrotational acoustic waves. Experimentaldata often motivates this approach, since observed os-cillation frequencies are readily correlated with thestanding acoustic modes of the chamber. However,assuming an acoustic basis for an instability theory re-sults in the inability to accommodate correct boundaryconditions (such as the no-slip condition at chamberboundaries) and the loss of important flow features suchas unsteady vorticity that can have major impact on thevalidity of the results. It is also difficult to properlytreat finite amplitude waves using an acoustic model.There is much evidence that the high-amplitude wavesystems in unstable rockets are more akin to travelingshock fronts.43-46 Early efforts were made to account forsteepened wave effects6-7, but the analytical methodsapplied did not lead to practical solutions. These wereusually based on the method of characteristics; they didnot lend themselves well to generalized computationaltechniques of the kind needed for a practical stabilityassessment algorithm.
A. Failure of the SSP
The well-known failure of predictive algorithms insolid rocket analysis is largely the result of neglect ofkey features of the unsteady flow of combustion prod-ucts. In particular, one must account for effects of vor-ticity production and propagation, and for the tendencyof initially weak (essentially acoustic) waves to steepeninto shock-like wave motions.
Solid propellant rocket motor analysis as applied inthe SSP computer program, implements Culick’s irro-tational acoustics based analyses.3-5,8,12,25,47-52 As alreadydemonstrated, this formulation does not yield satisfac-tory predictive capability. This is partly the result ofthe assumption that the wave motions are strictlyacoustic (irrotational) in nature. Recent work by thewriters of the present paper has focused on improvingSSP by inclusion of important mechanisms such asvorticity generation and shock wave interactions.These improvements are now described briefly.
B. Rotational Flow Effects
Considerable progress has been made in the lastdecade in understanding both the precise source of thevorticity and the resulting changes in the oscillatoryflow. Analytical,48,53-60 numerical,61-66 and experimentalinvestigations67-70 have demonstrated that rotationalflow effects play an important role in the unsteady gasmotions in solid rocket motors. Much effort has beendirected to constructing the required corrections to theacoustic model. This has culminated in a comprehen-sive picture of the unsteady motions that agrees withexperimental measurements,48,53,54 as well as numericalsimulations.55
These models were used in carrying out three-dimensional system stability calculations,48,53 in a firstattempt to account for rotational flow effects by cor-recting the acoustic instability algorithm. In this proc-ess one discovers the origin and the three-dimensionalform of the classical flow-turning correction; relatedterms appear that are not accounted for in the SSP algo-rithm. In particular, a rotational correction term wasidentified that cancels the flow-turning energy loss in afull-length cylindrical grain. However, all of these re-sults must now be questioned because they are foundedon an incomplete representation of the system energybalance.
Culick’s stability estimation procedure is based oncalculating the exponential growth (or decay) of anirrotational acoustic wave; the results are equivalent toenergy balance models used earlier by Cantrell andHart.71 In all of these calculations the system energy isrepresented by the classical Kirchoff (irrotational andisentropic) acoustic energy density. Consequently, itdoes not represent the full unsteady field, which mustinclude both acoustic and rotational flow effects. Ki-netic energy carried by the vorticity waves is thus ig-nored. The actual average unsteady energy containedin the system at a given time is about 25% larger thanthe acoustic energy alone.49 Furthermore, representationof the energy sources and sinks that determine the sta-bility characteristics of the motor chamber must also bemodified. Attempts to correct the acoustic growth ratemodel by retention of rotational flow source termsonly,48,53 preclude a full representation of the effects ofvorticity generation and coupling.
C. Nonlinear Effects
The effects of nonlinear interactions play a majorrole in controlling the nonlinear attributes of pressureoscillations in motor combustion chambers. Thus,strictly linearized models are of little value in the pre-sent situation. Of crucial importance is the modeling ofthe time history of the oscillations, their limiting am-plitude, and the critical triggering amplitudes at whichan otherwise stable motor is caused to transition toviolent oscillations. Pulsing of this sort can result fromrandom disturbances and by the passage of pieces ofliner or insulation through the nozzle leading to a mo-mentary decrease in the effective throat area. Thus it isimportant to characterize this aspect of motor behavior.
As described in the last section, shock waves are amajor nonlinear attribute of axial mode oscillations insolid rockets.16,23,24,29 There is no question that shock-like features dominate the gas motions when wavesgrow to finite amplitude. The steepening process is anatural feature of nonlinear resonant oscillations of gascolumns.41,72 Recognition of the role played by shockwaves in combustion instability is certainly not wide-

–7–American Institute of Aeronautics and Astronautics.
spread, although many investigators, especially in thecase of liquid engine instability have examined thispossibility.23,24,73-75 However, current liquid engine orsolid rocket motor instability prediction methods do notrecognize this obviously important aspect of the prob-lem. It constitutes yet another nonlinear feature thatmust be accommodated if a complete theoretical foun-dation is to be constructed.
D. Formulating a Nonlinear Instability Algorithm
In this section we briefly discuss what is neededfrom the theoretical standpoint to provide a useful ana-lytical framework for combustion instability. It is nec-essary to accommodate the features we have identifiedas key elements for a correct physical representation.We must discard models based on the acoustic point ofview. Nonlinear energy losses in steep wave fronts andenergy flow to the wave structure from combustionmust be accommodated. By far, the most effectivemethod for incorporating this large array of physi-cal/chemical interactions is by application of a globalnonlinear energy balance. Methods based on the usualperturbed acoustic wave equation cannot properly ac-count for the many interactions that must be captured.
E. Mathematical Strategy
Since a central concern is the handling of steepfronted waves, it is necessary to carefully lay out a so-lution technique that will lead to a practical predictivealgorithm. To make the mathematical problem tracta-ble, we choose to avoid fashionable numerical strate-gies such as the method of characteristics or a full CFDtreatment of the problem. Either of these techniqueswould likely fail in the problem we are attempting tosolve here.
What is required is an approach that bridges thegap between the earlier perturbation techniques thatlimit the solutions to linear gas motions and other adhoc methods such as those introduced by Culick tostudy nonlinear features of combustion instability.5,21,28
Figure 5 displays a frame from an animation of the de-velopment of the wave system with time predicted byCulick’s model. At the instant shown, the wave hasnearly reached its final limit condition, and the wavefront is moving to the left. This wave pattern is thecomposite of twenty acoustic modes. Energy from thelower order modes has cascaded to the higher modesuntil the stationary state shown in the figure has beenreached. This “mode coupling” effect clearly repre-sents the natural steepening process. What began as aset of standing acoustic modes has transitioned into asingle traveling steep-fronted wave. Once limiting hasoccurred, the wave simply bounces back and forth be-tween the ends of the chamber The period of oscilla-tion corresponds to
steep wave front
direction of wave travel
Relative position in chamber, x
Nor
mal
ized
pre
ssur
e am
plitu
de, p
'Fig. 5 Culick’s fully steepened wave.
the first longitudinal acoustic mode. What is shownhere agrees in every respect with the fully steepenedcondition described in earlier works by the presentwriter.23,24The calculations and animation from whichFig. 5 was taken were carried out by J. French. He hasfully implemented Culick’s nonlinear model in the SSP.It can now be run for longitudinal modes with arbitrarychamber cross-sectional area distribution.
In the problem of central interest here, we are notconcerned with the steepening process, per se, rather,we wish to understand the gas motions in the fullysteepened state. Figure 6 illustrates several aspects ofthe problem we must solve.
Fig. 6 Nonlinear evolution of system amplitude.

–8–American Institute of Aeronautics and Astronautics.
This diagram shows in schematic form all features ofcombustion instability that appear experimentally.Furthermore, it provides a useful way to categorize thevarious analytical methods by which we attempt to un-derstand this very complicated physical problem. Fig-ure 6 shows that if the waves grow from noise in thelinear fashion, the motion is linear and each acousticmode grows individually according to the balance ofenergy gains and losses peculiar to that operating fre-quency. In general, the lowest order mode grows mostrapidly because it requires less energy to excite. As theoscillations grow to finite amplitude, nonlinear effectsappear and there is a phase in which energy is redistrib-uted from lower to higher modal components; it is thisprocess that is described in Culick’s nonlinear model.
As the wave steepens, the relative amplitudes ofthe constituent acoustic modes reach a frozen state cor-responding to shock-like behavior. This is the fullynonlinear state illustrated in the figure. In pulse testingof motors, the steepening process is almost instantane-ous. For example, Brownlee16 notes that when thepulse is fired, “… the injected flow disturbance trav-ersed the length of the motor, partially reflected at thenozzle end, and became a steep-fronted shock-likewave in one cycle.” Thus in modeling such effects, it isunnecessary to trace the full steepening process. Therelative wave amplitudes are readily estimated from alarge database of experimental results. It is readily es-tablished that precise knowledge of the relative ampli-tudes is not necessary to achieve an accurate estimate ofthe limit cycle and triggering amplitudes.
We must formulate a mathematical strategy thatyields the essential information, namely, the limit am-plitude reached by the system in the fully steepenedstate. This is the information required by the motordesigner in assessing potential vibration levels, and aswe will show, the severity of heat loads and force levelson fragile injector components.
The key to simplifying the nonlinear problem is toassume that the fully steepened traveling wave is acomposite of the chamber normal modes:
p r,t( ) = ! t( ) An t( )" n r( )
n=1
#
$ (3)
where !(t) is the instantaneous amplitude and n is the
mode integer. This is a proven simplifying strategy23,24
that follows directly as the final form reached in Cu-lick’s calculations. It conforms well to all experimentalfeatures that must be accommodated in our solutionalgorithm. Before proceeding with the analysis, let usfirst test this model to see if it contains the necessaryfeatures and flexibility.
F. Traveling Shocked Acoustic Waves by Super-position of Standing Normal Modes
Equation (1) provides a useful tool and a way toavoid all computational difficulties associated withmodeling of the unsteady flowfield. In the case of sim-ple longitudinal oscillations in a chamber of constantcross section, the functions in the summation are, forexample:
An t( ) = 8n
4n2 +1
!"#
$%&
sinn'a0
L
!
"#$
%&
( n r( ) = cosn' z
L
!"#
$%&
)
*
++
,
++
(4)
where L is the chamber length and z is the axial posi-tion. If Eq. (1) is evaluated with these parameters, thewaveform illustrated in Fig. 7a is produced. Thisshould be compared to a measured waveform in Fig.7b. The data shown came from precision pressuremeasurements in a liquid rocket preburner undergoinghigh-amplitude nonlinear longitudinal oscillations.
It is clear that Eq. (1) yields an excellent model ofthe actual waveform. It can be used to represent anyexperimental waveform by fitting a Fourier series to thedata. It is known that once the wave has reached thelimit cycle conditions, the waveform remains essen-tially frozen; only the amplitude then changes withtime. This is a powerful computational simplification.
(a) Waveform calculated using Eq. (1) - Twenty Modes
(b) Preburner waveform during severe oscillation
Fig. 7 Measured vs. calculated waveform.

–9–American Institute of Aeronautics and Astronautics.
G. Notation
The following dimensionless variables will be used(star * denotes dimensional quantities; subscript 0 indi-cates quiescent chamber reference conditions):
p = p * P0
! = ! * !0
T = T * T0
u = u * a0
r = r * L
"
#
$$$
%
$$$
F = F * !0a02 L( )
t = t * L a0( )& = & ' a0 L( )e = e * a0
2
"
#
$$$
%
$$$
(5)
where F is a body force and e is specific internal en-ergy. The dimensionless governing equations are:Continuity:
!"!t
+# $ "u( ) = 0 (6)
Momentum:
! "u
"t+ 1
2#u $u % u &'
()*
+,-
= %1
.#p %/ 2# &# & u + /d
2# # $u( ) + F
(7)
Energy:
!!t
" e + 12
u #u( )$%
&' +( # "u e + 1
2u #u( )$
%&' =
=
) 2
* +1( )Pr(2T +
1
*( # pu( ) + "u # u ,-( )
+u #F + ) 2 - #- + u #( ,-$% &'
+)d2 ( #u( )2
+ u #( ( #u( )$%.
&'/+ hi
0wii=1
N
0
1
2
333
4
333
5
6
333
7
333
(8)
Species mass fraction:
!
"Yi
"t+ u #$Yi
%
&'
(
)* +
, 2
Pr$2Yi =wi (9)
State:
p = !T (10)
The Prandtl number Pr and viscous reference lengths(proportional to inverse square root of appropriate Rey-nolds numbers) appear naturally. These are defined as:
Pr !cpµ
"
# 2 =$
a0L
#d2 = # 2 % µ + 4
3( )# f !
"&0cpV
="
&0cpa0 Mb
'
(
)))))
*
)))))
(11)
The latter reference length is the reference flame lengthneeded in regions dominated by combustion heat re-
lease. Other variables needed in modeling chemicalreactions are:
w = w* !0a0 L( )=Dimensionless reaction rate
hio = hi
o( )* a02
= Dimensionless heat of combustion
Yi = Mass fraction for species i
"
#
$$$$
%
$$$$
(12)
H. Separating Steady and Unsteady Parts
The steady and unsteady parts of the variables aredecomposed in the standard manner by writing
! = ! + ! 1( )
p = P + p1( )
T = T + T1( )
u = MbU + u1( )
" = Mb# $U +# $ u1( ) = Mb% +" 1( )
&
'
((((
)
((((
(13)
Since the energy balance is the key to understanding thesystem behavior, let us carefully work with it. In whatfollows, we will avoid the common simplifying as-sumptions such as the isentropic flow limitation. Wewill also carefully include heat transfer and viscosity sothat, in effect, we are modeling a wave system com-posed of superimposed waves of compressibility, vor-ticity, and entropy.
Define the system energy density as
% ! " e + 1
2u #u( ) (14)
Then for a calorically perfect gas the energy equationbecomes
!%
!t= "# $ %u
T
& & "1( ) +12
u $u'
())
*
+,,
-./
0/
12/
3/+
+
"1
&# $ pu( ) + %u $ u 45( )
+6 2 5 $5 " u $# 45( ) + 6 2
& "1( )Pr
#2T
+6d2 # $u( )2 + u $# # $u( )'()
*+,+ &Q + u $F
-
.
////
0
////
1
2
////
3
////
(15)
where a shorthand notation has been adopted for theheat release in combustion processes. The body force,F, is a placeholder for two-phase flow effects such asparticle damping. that will be addressed later. Note thatthe compressive viscous force and conduction heat

–10–American Institute of Aeronautics and Astronautics.
transfer terms are retained. These are the source of theimportant nonlinear energy loss in steep wave fronts.
Using Eq. (13), one can now expand Eq. (15) to givethe equation for the system amplitude. To accomplishthis, the time-averaged Eq. (15) can be written as
2! d!dt
%
=
"# $ %uT
& & "1( ) +12
u $u'
()
*
+,
-
.//
0
122
"1
&# $ pu( ) + %u $ u 34( ) + u $F + &Q
+5 2 4 $4 " u $# 34-. 01 + 5d2u $# # $u( )
+5 2
& "1( )Pr#2T + 5d
2 # $u( )2678
98
:;8
<8
(16)
where
% =1
! P
"p
!#$%
&'(
2
+ 12) "u * "u (17)
is the time-averaged oscillatory energy. Note that thisconsists of a “potential” energy proportional to thepressure fluctuation and a kinetic part proportional tothe square of the particle velocity. The latter is not thesimple acoustic particle velocity; it is the composite ofthe irrotational and rotational parts needed to satisfycorrect boundary conditions at the chamber surfaces.
Equation (17) is similar to the familiar Kirchoff ref-erence energy density from classical acoustics:76
%Kirchoff =1
2
p1( )!
"
#$$
%
&''
2
+ 12(u
1( ) )u 1( ) (18)
The differences are largely the result of relaxing theisentropic flow assumption used in deriving Eq. (16).
I. Spatial Averaging
In order to account for the net behavior of the en-tire system it is now required to integrate the time-averaged energy density over the chamber control vol-ume. We define the reference system energy as
E2 ! %V""" dV =
=1
# P
$p
#%&'
()*
2
+ 12
P $u + $u dVV"""
(19)
where primed variables are defined by factoring out theslowly changing amplitude. For example,
p 1( ) = ! t( ) "p
Then the rate of change of system amplitude can bewritten in the convenient form:
d!dt
= " 1( )! +" 2( )! 2 +" 3( )!3 +L (20)
where !1( ) is the linear growth rate for the composite
wave system. The reader should also notice the similar-ity of this expression to Jensen’s Pi theorem describedin the last section. This expression emphasizes the im-portant fact that the nonlinear model is only as good asthe linear representation of the system.
In many ways, achieving a valid linear model is themost difficult part of the entire combustion instabilityproblem. It has in fact been the downfall of numerouspast attempts. Much time and energy has been ex-pended on attempts to correct deficiencies in the linearmodel by introduction of ad hoc fixes that are oftenbased on guesswork, misinterpretation, and distortion ofexperimental evidence. The roadway is strewn with thewreckage of such attempts. We avoid the temptation todwell on the past. Clearly, the path to success is toavoid losing any of the crucial physical information thathas been collected in the system energy balance con-structed here.
J. Linear Growth Rate
The linear part of Eq. (17) becomes
! 1( ) = 1
2E2"
1
#n $ %p %u +
MbU
# 2P%p 2
&
'((
)
*++dS
S,,
-./
0/
" MbP n $ 12
U %u $ %u( ) + %u U $ %u( ) dSS,,
+ MbPU $ %u 1 %2 + %u $ U 1 %2( )+ %u $ %u 13( )&
'
((
)
*
++dV
V,,,
+ 4 2 n $ %u 1 %2 dSS,, + 4d
2 %u $5 5 $ %u( ) dVV,,,
+ &Q dVV,,, + F dV
V,,,
67/
8/
(21)
where only the placeholders for combustion heat re-lease and two-phase flow interactions are shown.Please note that we have not assumed that the meanpressure is constant as is usually done. The quasi-steady chamber pressure, P , is a slowly changing pa-rameter that is clearly linked to the growth of thewaves. In order to evaluate the linear system stability,one must know P , which, as it happens, is an impor-tant link to the mean (DC) pressure shift.
Careful evaluation of the volume integrals in Eq. (21)leads to the vanishing of several of the terms shown.One of these is the Culick flow turning effect, whichhas been the source of considerable controversy in thesolid propellant rocket instability research commu-nity.48,53,77 Unfortunately, this term leads to a dampingeffect, which in many motor evaluations is as large as

–11–American Institute of Aeronautics and Astronautics.
other main contributions to the energy balance. Toillustrate the handling of its source in Eq. (21), we nowexamine the specific term from which flow turningoriginates:
!41( ) = MbP
2E2U " #u $ #% + #u "U $ #%( )dV
V&&& (22)
The subscript, 4, is an artifact of the numbering systemintroduced in Ref. (49) to keep track of the many linearstability contributions in Eq. (21). Flow turning wasfirst identified by Culick3,11 in his one-dimensional cal-culations as a result of forcing satisfaction of the no-slipcondition (which could not be accomplished in histhree-dimensional model because of the irrotationalflow assumption). Flandro48,49,53,78 later showed that theactual source of the flow turning was the irrotationalpart of the second term in Eq. (22). None of the earlierstability calculations incorporated all of the rotationalterms represented in Eq. (22). These appear becausewe have now used the complete energy balance equa-tion. When all of the terms are properly accounted for,then application of the familiar scalar triple productidentity
A ! B "C( ) = B ! C " A( )
leads to
U ! "u # "$ + "u !U # "$
= % "u !U # "$ + "u !U # "$ = 0(23)
Flow turning has now vanished. This result agrees withconsiderable experimental evidence and with otheranalyses.79,80
This correction to the linear growth rate leads tomajor improvements in correspondence with experi-mental data. The lesson here is that only by accountingfor all unsteady energy gains and losses can a correctlinear stability theory be constructed. Other terms inEq. (21) once thought to have important stability impli-cations do not appear when the integrals are carefullyevaluated.
K. Linear Driving Mechanisms
Equation (21) reflects all potentially important lin-ear sources of unsteady energy as well as damping ef-fects. Many years of experience have shown that thefirst pair of terms represented by the surface integral
!11( ) = "
1
2# E2$p n % u +
Mb
# 2Pn %U $p 2
&
'(
)
*+ dS
S,, (24)
play a central role in driving acoustic waves. They arealso the origin of the important nozzle damping effect.In cases where the combustion energy release occursclose to the surface (as in a burning solid propellant) ornear the injector surface (in liquid rockets), this term isthe primary source of unsteady energy. At first glance,it appears that Eq. (21) should represent zero contribu-
tion since for acoustic motions the pressure and velocityfluctuations are 90o out of phase. However, one mustaccount for the phase shift in the combustion zone re-gion of nonuniformity. This is done in the solid pro-pellant case by introducing the admittance functionaccounting for myriad chemical and physical processeswithin the flame zone. For example, one defines
n ! u = "Mb Ab
r( ) #p
$(25)
expressing the normal velocity fluctuation in terms ofthe pressure disturbance that creates it. Major effort isexpended in the solid rocket community in character-izing the admittance function. This is a familiar sce-nario and need not be reviewed in depth. The solidrocket literature is replete with discussion of this im-portant concept. A lucid treatment can be found in Ref.8. The associated nozzle damping is also described indetail in this and many other documents.
The first term in Eq. (21) is also a potent source ofenergy liquid rocket instability analysis. If
!p n " u is
evaluated at the injection surface accounting for thephase difference between fluctuations in the incomingoxidizer and fuel velocities and the pressure oscillationsat the interface, it will be seen that a powerful analog tothe solid rocket pressure coupling is identified. Exami-nation of experimental data shows that indeed the pres-sures in the oxidizer and fuel feed lines upstream of theinjector reflect the pressure fluctuations in the chamberand exhibit the phase differences needed to explain thispowerful unsteady energy source. Additional energy issupplied to the waves via the more traditional distrib-uted combustion. However, there can be no doubt thatany energy source located at a pressure antinode (e.g.the injector surface) is a potent driver of oscillations ofthe type observed. These matters are currently under-going thorough study by the authors and coworkers.
L. Effects of Nonlinearity
It is now required to examine nonlinear termsarising from the expansion of Eq. (13). The most im-portant of these are the energy losses incurred in steepwave fronts. Let us focus on the last set of terms in Eq.(16). After temporal and spatial averaging, we are leftwith
! 2
" #1( )Pr$2T + !d
2 $ %u( )2 dVV&&& (26)
Those readers with training in gasdynamics will recog-nize in this term the source of the entropy gain and as-sociated energy loss in a steep wave front. In fact, thisterm is usually ignored because it is only significant ifthere are very steep gradients in particle velocity andtemperature. Let us evaluate this term by considering a

–12–American Institute of Aeronautics and Astronautics.
very small portion of the chamber volume that encom-passes the shock layer formed by a steepened wavesystem. The shock layer can be treated as a region ofnonuniformity as illustrated in Fig. 8.
Fig. 8 Shock layer structure.
Following standard procedures, Eq. (26) can be reducedto the classical textbook result showing the origin of theentropy gain in the shockwave. By manipulations usingthe Rankine-Hugoniot equations, we find the formulafor the energy loss in the steep wave to be
dE
dt
!"#
$%& shock
= 'Sport
( ( '1( )s2 ' s1( )*
cv
= ')shock
P
!
"#$
%&
3
Sport( +1
12( 3
!
"#
$
%&
(27)
leading to a simple approximation for the nonlinearstability parameter in Eq. (17), namely
! 2( ) = "
# +1( )3E2
$2#
%&'
()*
3
Sport (28)
where ! is a factor dependent upon the assumed wave-
form for the traveling shock wave, and Sport is the areaof the shock front. In the longitudinal case, this is sim-ply the cross-sectional area of the duct at a convenientlocation.
This nonlinear loss effect is the principal dampingmechanism in both liquid and solid propellant motors,
and is the key element in understanding the limit cyclebehavior so often encountered when finite amplitudewaves appear. It is tempting to carry the implied per-turbation series in Eq. (20) to higher than second orderin the system amplitude. However, such an extension isnot justified in the present situation because we assumethat the unsteady flowfield and mode shape informationfor the chamber are accurate only to the first order inwave amplitude. Let us now test the results that wehave found against experimental evidence.
M. Limit Cycle Amplitude
In solid propellant rockets one is seldom interestedin tracing the details of the growth of the waves to theirfinal state. Such motors usually operate for very longtime on the time scale of the wave motions with veryslow changes in the steady operating parameters. Forthis reason, strictly linear models provide little usefulinformation in the predictive sense. There is, however,a well-known rule of thumb that suggests that largevalues of the linear growth rate, estimated for exampleby using Eq. (21), correlate with large values of thelimit cycle amplitude. Clearly it is the latter amplitudethat is of concern, since it is a measure of the vibrationand other impacts on the system due to the oscillations.
What is required is information concerning thelimit amplitude reached as the wave system approachesa fully steepened form. Equation (20) provides the re-quired limit amplitude. In the fully steepened state, thewave amplitude is stationary, and it is readily seen thatthe limit amplitude is
!limit = "# 1( )
# 2( ) (29)
which is physically meaningful only when !2( ) is
negative. This will always be the case for the shockloss mechanism described by Eq. (23). To the knowl-edge of the authors, there has never been either experi-mental or theoretical evidence of second order interac-tions that are not damping effects. However there maybe nonlinear driving mechanisms of this sort yet to bediscovered. Equation (29) has been tested for manysolid rocket data sets and has been found to yield anexcellent estimate of the limit amplitude. Again, notethat good results depend critically on a valid linear sta-bility estimate.
N. Triggering Amplitude
This is a controversial subject. If one examinesFig. 6, in the context of Eq. (20) (extended to higherorders in the wave amplitude) it is apparent that it istheoretically possible to raise the amplitude of a systemoscillating in its lowest limit cycle to a yet higher limit

–13–American Institute of Aeronautics and Astronautics.
amplitude by adding sufficient energy in a pulse to raisethe oscillations above a critical triggering level. This iswhat might be termed true triggering. Careful exami-nation of solid rocket data has made it clear that thisscenario seldom fits what is actually observed. In everycase studied by the authors, motors that exhibited “trig-gering” were linearly unstable motors. That is, they arenot stable motors that are triggered into a high-amplitude limit cycle. When such burners operatewithout deliberate pulsing, the wave system grows soslowly from the always-present random noise, that os-cillations are barely measurable by the end of the burn.However, when the motor is disturbed by a sufficientlylarge pulse, the broadband energy increment can excitefinite amplitude steep-fronted waves. The system thengrows rapidly to the limit cycle amplitude. Calcula-tions using Eq. (20) agree very well with actual obser-vations. We believe that true triggering is seldom, ifever, observed in actual rocket motors. Much of theconfusion over this issue has resulted from applicationof faulty predictive codes that almost always predict alinearly stable system. A classic example can be foundin the Blomshield data.36 Every motor fired in this testseries was predicted by the SSP to be linearly stable. Infact there is no doubt that many of the motors werelinearly unstable at least during part of the burn. Unlesspulsed, only very low level oscillations were present.Sufficiently strong pulsing during linearly unstable op-eration led to violent oscillations in several tests.
IV. The DC Pressure ShiftThe mean pressure rise, or DC shift, is an oft-
observed feature of nonlinear instability. As illustratedin Fig. 3, it is obviously closely linked to the growthand limiting of the system of acoustic waves. A test ofthe validity of the theory presented in this paper is itsability to predict this important classical feature ofcombustion instability. What we will demonstrate hereis that the same mechanism that drives the oscillations(first term in Eq. (21)) is also the source of the DC shiftphenomenon.
Until now, explaining the mean pressure excursionhas required invoking ad hoc flow-reversal, velocitycoupling, burning surface velocity rectification, or“acoustic erosivity” effects.74 These confusing and of-ten simply misleading paraphernalia can now be dis-carded.
Clearly, any attempt to understand one nonlinearfeature without due attention to other closely connectedfeatures does not take full advantage of the experimen-tal data. In this section, we demonstrate the benefits ofaccommodating all of the key observations in formu-lating the mathematical approach.
Previous theoretical models have been based on theassumption that the mean gas properties remain con-stant. For example, Culick writes: “…we assume that
the average values do not vary with time. That is not anessential assumption, but to correct it requires consider-able elaboration not justified here. However, there arepractical situations in which changes in the averagevalues, particularly the pressure, are important. Nothorough analysis of such cases has been given.”8 Inwhat follows we present the missing analysis.
The formulation described in the last section hasbeen deliberately written without the assumption ofconstant mean properties. Thus we are able to study thecoupling between the unsteady and quasi-steady gasmotions. It is assumed that the chamber mean tem-perature is controlled by combustion heat release and istherefore essentially constant. Then the state equationshows that mean pressure and density are slowlychanging functions of time. The surface referenceMach number and the wave amplitude are also slowfunctions of time as already demonstrated.
A. Formula for Rate of Change of Mean Pressure
The source of the DC shift is readily found if non-linear terms are retained in the continuity equation.Expanding Eq. (6) and taking the time average yields
dP
dt= !" # Mb$U( )! %2
&" # p
1( )u 1( ) (30)
where the first term on the right represents quasi-steadymass flux at the chamber boundaries due to combustionand nozzle outflow. The similarity of the second termto the pressure-coupled acoustic driving in Eq. (21) isintriguing. Integration over the chamber volume leadsto the equation for the rate of change of the quasi-steady chamber operating pressure:
dP
dt=
!1
Vn " #MbU( )dS
S$$ !
!%2 1
&V
'()
*+,
n " p1( )u 1( ) dS
S$$
-
.
//
0
//
1
2
//
3
//
(31)
The first term is handled by means of the standardsteady internal ballistics calculations; the second leadsto the mean pressure shift. Notice that it is proportionalto the second order of the wave amplitude. Equation(31) verifies the anticipated close coupling between themean pressure rise and the growth and limiting of thepressure oscillations.
B. Simulating and Predicting Motor Behavior
The results for the nonlinear system growth and thecorresponding mean pressure excursion must be com-puted simultaneously. When the several system modelsare collected and the integrals are performed, we areleft with a pair of coupled nonlinear, ordinary differen-tial equations:

–14–American Institute of Aeronautics and Astronautics.
d!dt
= " 1( )! +" 2( )!2 +L
dP
dt= # 1( ) + # 1( )!2
$
%&&
'&&
(32)
These are readily solved using a simple numerical algo-rithm. The result is the time history of the growth andlimiting of the pressure oscillation amplitude and theaccompanying growth and limiting of the mean pres-sure amplitude. These results agree in every way withactual motor data.
C. Results
The methods described here are being used to en-hance the SSP by enabling the motor analyst/designerto predict the stability of a given system and to diag-nose sets of experimental data.
We show here some preliminary results from ap-plication of Eq. (32) in the difficult dilemma repre-sented by Blomshield’s data set.36-38,81,82 In virtually allof his motor configurations, the SSP code predictedstable behavior as depicted in Fig. 4. Yet, many of themotors were readily pulsed into high-amplitude oscilla-tions. We seek here to understand this triggering phe-nomenon. Numerical solutions of Eq. (32) yield therequired information.
Figure 9 shows a pressure vs. time trace for a cy-lindrical motor from this test series. The progressivepressure rise results from the increasing burning surfacearea with time. The mean pressure shift and pressureoscillations are clearly shown. Data came from a pres-sure transducer at the motor forward end. The spectrum
Fig. 9 Pressure vs. time for motor no. 9.36
was dominated by the 1L (first longitudinal mode) ac-companied by a great many harmonics representingstrong evidence for steep-fronted waves. Figure 10shows the predicted behavior of this motor found by
solving Eq. (32) using geometrical and physical datafrom the tests; no curve fitting was employed
All important features of the actual data are wellrepresented. Notice that even though the system islinearly unstable, no wave growth or DC shift occursunless the motor is pulsed. Examination of the numeri-cal results reveals that this motor was marginally stableduring the first part of the burn, but the net lineargrowth rate became positive after about t = 0.5 sec.The motor was then susceptible to pulsing, and could be“triggered” into violent oscillations. Parametric studieshave shown that the predicted DC shift and corre-sponding oscillation limit cycle amplitude are insensi-tive to the pulse amplitude; this agrees with experi-mental findings.
To summarize: we have devised a new procedurefor estimating the tendency for a given rocket motorchamber to exhibit nonlinear combustion instability.The new algorithm gives not only growth rate informa-tion and the associated stability maps, but more impor-tantly predicts the evolution of the system oscillationamplitude and the mean pressure shift. These analyti-cal/numerical tools promise to give the motor designerthe ability to avoid design features that may promotecombustion instability much earlier in the developmentcycle than possible using other methods.
Fig. 10 Simulation of motor no. 9.83,84

–15–American Institute of Aeronautics and Astronautics.
If combustion instability problems are encounteredin the motor test phase of development, these new toolsyield an improved method for correlating experimentaldata and correctly interpreting the results. They alsoprovide the ability to test and perfect corrective mecha-nisms if these become necessary.
V. ConclusionsIn this paper we have demonstrated a predictive
algorithm based on sound theoretical foundations thatfully explains the nonlinear behavior observed in unsta-ble rocket motor systems. The close connection be-tween pressure coupling, the main linear drivingmechanism in combustion instability, and the DC pres-sure shift has been illuminated. Knowledge of thephysical parameters that control the pressure coupling,namely the admittance function or response function ofthe propellant, makes it possible to determine thegrowth and limiting amplitude of both the wave systemand the accompanying mean pressure shift.
Much work is left in perfecting and fine tuning thenew methodology. Eventually these tools will be in-corporated into commercially available analysis toolsthat will enable the rocket motor designer and experi-mentalist to better deal with combustion instabilityproblems.
Acknowledgements
This work was sponsored partly by the Universityof Tennessee, UTSI, and partly by Software and Engi-neering Associates, Inc., SEA, Carson City, NV. Dr. J.C. French was the program manager. The first authorwishes to express appreciation for additional supportfrom the Edward J. and Carolyn P. Boling Chair of Ex-cellence in Advanced Propulsion, University of Ten-nessee.
References
1Cheng, S. I, “High Frequency Combustion Instability inSolid Propellant Rockets (Parts I and II),” Jet Propulsion,Vol. 24, No. 1, 1954, pp. 27-32, 102-109.
2Culick, F. E. C., “Acoustic Oscillations in Solid PropellantRocket Chambers,” Acta Astronautica, Vol. 12, No. 2, 1966,pp. 113-126.
3Culick, F. E. C., “The Stability of One-DimensionalMotions in a Rocket Motor,” Combustion Science andTechnology, Vol. 7, No. 4, 1973, pp. 165-175.
4Culick, F. E. C., “Stability of Three-Dimensional Motionsin a Rocket Motor,” Combustion Science and Technology,Vol. 10, No. 3, 1974, pp. 109-124.
5Culick, F. E. C., “Nonlinear Behavior of Acoustic Wavesin Combustion Chambers,” California Institute ofTechnology, Pasadena, CA, 1975.
6Culick, F. E. C., “Nonlinear Behavior Acoustic Waves inCombustion Chambers, Parts 1 and 2,” Acta Astronautica,Vol. 3, 1976, pp. 714-757.
7Culick, F. E. C., “Combustion Instabilities in PropulsionSystems,” American Society of Mechanical Engineers, NoiseControl and Acoustics Division, Vol. 4, 1989, pp. 33-52.
8Culick, F. E. C., and Yang, V., “Prediction of the Stabilityof Unsteady Motions in Solid Propellant Rocket Motors,”Nonsteady Burning and Combustion Stability of SolidPropellants, Vol. 143, edited by L. De Luca, E. W. Price, andM. Summerfield, AIAA Progress in Astronautics andAeronautics, Washington, DC, 1992, pp. 719-779.
9Hart, R. W., and McClure, F. T., “Combustion Instability:Acoustic Interaction with a Burning Propellant Surface,” TheJournal of Chemical Physics, Vol. 10, No. 6, 1959, pp. 1501-1514.
10Hart, R. W., and McClure, F. T., “Theory of AcousticInstability in Solid Propellant Rocket Combustion,” TenthSymposium (International) on Combustion, 1964, pp. 1047-1066.
11Culick, F. E. C., “Stability of Longitudinal Oscillationswith Pressure and Velocity Coupling in a Solid PropellantRocket,” Combustion Science and Technology, Vol. 2, No. 4,1970, pp. 179-201.
12Culick, F. E. C., “Combustion Instabilities in PropulsionSystems,” Unsteady Combustion, Kluwer AcademicPublishers, 1996, pp. 173-241.
13Price, E. W., and Flandro, G. A., “Combustion Instabilityin Solid Rockets,” AFOSR, Technical Rept. TR-87-0459,February 1987.
14Price, E. W. a. S., J. W., “Combustion Instability in SolidPropellant Rocket Motors,” Jet Propulsion, Vol. 28, 1958, pp.190-192.
15Yang, V., Wicker, J., and Yoon, M. W., “Acoustic Wavesin Combustion Chambers,” Liquid Rocket Engine CombustionInstability, Vol. 169, edited by V. Yang and W. E. Anderson,AIAA Progress in Astronautics and Aeronautics, 1995, pp.357-376.
16Brownlee, W. G., “Nonlinear Axial CombustionInstability in Solid Propellant Motors,” AIAA Journal, Vol. 2,No. 2, 1964, pp. 275-284.
17Brownlee, W. G., “An Experimental Investigation ofUnstable Combustion in Solid Propellant Rocket Motors,”Ph.D. Dissertation, California Institute of Technology, 1959.

–16–American Institute of Aeronautics and Astronautics.
18Green, J., L, “Observations on the Irregular Reaction ofSolid Propellant Charges,” Jet Propulsion, Vol. 26, 1956, pp.655-659.
19Nickerson, G. R., Coats, D. E., Hersmen, R. L., andLamberty, J., “A Computer Program for the Prediction ofSolid Propellant Rocket Motor Performance (SPP),” Softwareand Engineering Associates, Inc., AFRPL TR-83-036, CA,September 1983.
20Nickerson, G. R., Culick, F. E. C., and Dang, L. G.,“Standardized Stability Prediction Method for Solid RocketMotors Axial Mode Computer Program,” Software andEngineering Associates, Inc., AFRPL TR-83-017, September1983.
21Culick, F. E. C., “Non-Linear Growth and LimitingAmplitude of Acoustic Oscillations in CombustionChambers,” Combustion Science and Technology, Vol. 3, No.1, 1971, pp. 1-16.
22Culick, F. E. C., “Combustion Instabilities: Mating Danceof Chemical, Combustion, and Combustor Dynamics,” AIAAPaper 2000-3178, July 2000.
23Flandro, G. A., “Approximate Analysis of NonlinearInstability with Shock Waves,” AIAA Paper 82-1220, July1982.
24Flandro, G. A., “Energy Balance Analysis of NonlinearCombustion Instability,” Journal of Propulsion and Power,Vol. 1, No. 3, 1985, pp. 210-221.
25Flandro, G. A., “Analysis of Nonlinear CombustionInstability,” SIAM Minisymposium, March 1998.
26Yang, V., Kim, S. I., and Culick, F. E. C., “Triggering ofLongitudinal Pressure Oscillations in Combustion Chambers,I: Nonlinear Gasdynamics,” Combustion Science andTechnology, Vol. 72, No. 5, 1990, pp. 183-214.
27Culick, F. E. C., “Some Recent Results for NonlinearAcoustics in Combustion Chambers,” AIAA Journal, Vol. 32,No. 1, 1994, pp. 146-168.
28Culick, F. E. C., Burnley, V. S., and Swenson, G.,“Pulsed Instabilities in Solid-Propellant Rockets,” Journal ofPropulsion and Power, Vol. 11, No. 4, 1995, pp. 657-665.
29Levine, J. N., and Baum, J. D., “A Numerical Study ofNonlinear Phenomena in Solid Rocket Motors,” AIAAJournal, Vol. 21, No. 4, 1983, pp. 557-564.
30Brownlee, W. G. and. Kimball., G H, “Shock Propagationin Solid-Propellant Rocket Combustors,” AIAA, Vol. 4, No. 6,1966, pp. 1132-1134.
31Malhotra., S. and G. A. Flandro “On the Origin of the DCShift,” AIAA Paper 97-3249, July 1997.
32Price, E. W., “Experimental Observations of CombustionInstability,” Fundamentals of Solid-Propellant Combustion,Vol. 90, edited by K. Kuo and M. Summerfield, AIAAProgress in Astronautics and Aeronautics, New York, 1984,pp. 733-790.
33Flandro, G. A., Majdalani, J., and French, J. C.,“Incorporation of Nonlinear Capabilities in the StandardStability Prediction Program,” AIAA Paper 2004-4182, July2004.
34Flandro, G. A., Majdalani, J., and Sims, J. D., “NonlinearLongitudinal Mode Instability in Liquid Propellant RocketEngine Preburner,” AIAA Paper 2004-4162, July 2004.
35Jensen, R. C., and Beckstead, M. W., “LimitingAmplitude Analysis,” Hercules Incorporated, Magna, Utah,1973.
36Blomshield, F. S., “Stability Testing and Pulsing of FullScale Tactical Motors, Parts I and II,” Naval Air WarfareCenter, NAWCWPNS TP 8060, February 1996.
37Blomshield, F. S., Crump, J. E., Mathes, H. B., Stalnaker,R. A., and Beckstead, M. W., “Stability Testing of Full-ScaleTactical Motors,” Journal of Propulsion and Power, Vol. 13,No. 3, 1997, pp. 349-355.
38Blomshield, F. S., Mathes, H. B., Crump, J. E., Beiter, C.A., and Beckstead, M. W., “Nonlinear Stability Testing ofFull-Scale Tactical Motors,” Journal of Propulsion andPower, Vol. 13, No. 3, 1997, pp. 356-366.
39Flandro, G. A., Majdalani, J, and Sims, J. D., “NonlinearLongitudinal Mode Instability in Liquid Propellant RocketMotor Preburner,” AIAA 2004-4162, July 2004.
40Flandro, G. A., Majdalani, J, and Sims, J. D., “OnNonlinear Combustion Instability in Liquid Propellant RocketEngines,” AIAA Paper 2004-3516, July 2004 .
41Saenger, R. A. and Hudson, G. E., “Periodic ShockWaves in Resonating Gas Columns,” Journal of theAcoustical Society of America, Vol. 32, No. 8, 1960, pp. 961-970.
42Brownlee, W. G., and Marble, F. E., “An ExperimentalInvestigation of Unstable Combustion in Solid PropellantRocket Motors,” ARS Progress in Astronautics and Rocketry:Solid Propellant Rocket Research, Vol. 1, edited by M.Summerfield, Academic Press Inc., New York, 1960, pp. 455-494.
43Sotter, J. G., Woodward, J. W., and Clayton, R. M,“Injector Response to Strong High-Frequency PressureOscillations,” Journal of Spacecraft and Rockets, Vol. 6, No.4, 1969, pp. 504-506.
44Sotter, J. G. aand Clayton, R. M., “Monitoring theCombustion Process in Large Engines,” Journal of Spacecraftand Rockets, Vol. 4, No. 5, 1967, pp. 702-703.

–17–American Institute of Aeronautics and Astronautics.
45Clayton, R. M., “Experimental Measurements onRotating Detonation-Like Combustion,” JPL, Technical Rept.32-788, Pasadena, CA, August 1965.
46Clayton, R. M., Rogero, R. S., and Sotter, J. G., “AnExperimental Description of Destructive Liquid RocketResonant Combustion,” AIAA Journal, Vol. Vol 6, No. No. 7,1968, pp. 1252-1259.
47Flandro, G. A., “Nonlinear Unsteady Solid PropellantFlame Zone Analysis,” AIAA Paper 98-3700, 1998.
48Flandro, G. A., “Effects of Vorticity on RocketCombustion Stability,” Journal of Propulsion and Power,Vol. 11, No. 4, 1995, pp. 607-625.
49Flandro, G. A., and Majdalani, J., “AeroacousticInstability in Rockets,” AIAA Journal, Vol. 41, No. 3, 2003,pp. 485-497.
50Culick, F. E. C., and Yang, V., “Overview of CombustionInstabilities in Liquid Propellant Rocket Engines,” LiquidRocket Engine Combustion Instability, Vol. 169, edited by V.Yang and W. E. Anderson, AIAA Progress in Astronauticsand Aeronautics, 1995, pp. 1-37.
51Culick, F. E. C., “A Note on Rayleigh's Criterion,”Combustion Science and Technology, Vol. 56, 1987, pp. 159-166.
52Culick, F. E. C., “High Frequency Oscillations in LiquidRockets,” AIAA Journal, Vol. 1, No. 5, 1963, pp. 1097-1104.
53Flandro, G. A., “On Flow Turning,” AIAA Paper 95-2530, July 1995.
54Flandro, G. A., Cai, W., and Yang, V., “TurbulentTransport in Rocket Motor Unsteady Flowfield,” SolidPropellant Chemistry, Combustion, and Motor InteriorBallistics, Vol. 185, edited by V. Yang, T. B. Brill, and W.-Z.Ren, AIAA Progress in Astronautics and Aeronautics,Washington, DC, 2000, pp. 837-858.
55Majdalani, J., Flandro, G. A., and Roh, T. S.,“Convergence of Two Flowfield Models Predicting aDestabilizing Agent in Rocket Combustion,” Journal ofPropulsion and Power, Vol. 16, No. 3, 2000, pp. 492-497.
56Majdalani, J., and Van Moorhem, W. K., “ImprovedTime-Dependent Flowfield Solution for Solid RocketMotors,” AIAA Journal, Vol. 36, No. 2, 1998, pp. 241-248.
57Majdalani, J., “The Boundary Layer Structure inCylindrical Rocket Motors,” AIAA Journal, Vol. 37, No. 4,1999, pp. 505-508.
58Majdalani, J., “Vorticity Dynamics in Isobarically ClosedPorous Channels. Part I: Standard Perturbations,” Journal ofPropulsion and Power, Vol. 17, No. 2, 2001, pp. 355-362.
59Majdalani, J., and Roh, T. S., “Vorticity Dynamics inIsobarically Closed Porous Channels. Part II: Space-Reductive Perturbations,” Journal of Propulsion and Power,Vol. 17, No. 2, 2001, pp. 363-370.
60Majdalani, J., and Roh, T. S., “The Oscillatory ChannelFlow with Large Wall Injection,” Proceedings of the RoyalSociety, Series A, Vol. 456, No. 1999, 2000, pp. 1625-1657.
61Vuillot, F., and Avalon, G., “Acoustic Boundary Layer inLarge Solid Propellant Rocket Motors Using Navier-StokesEquations,” Journal of Propulsion and Power, Vol. 7, No. 2,1991, pp. 231-239.
62Roh, T. S., Tseng, I. S., and Yang, V., “Effects ofAcoustic Oscillations on Flame Dynamics of HomogeneousPropellants in Rocket Motors,” Journal of Propulsion andPower, Vol. 11, No. 4, 1995, pp. 640-650.
63Yang, V., and Roh, T. S., “Transient CombustionResponse of Solid Propellant to Acoustic Disturbance inRocket Motors,” AIAA Paper 95-0602, January 1995.
64Vuillot, F., “Numerical Computation of AcousticBoundary Layers in Large Solid Propellant Space Booster,”AIAA Paper 91-0206, January 1991.
65Baum, J. D., Levine, J. N., and Lovine, R. L., “PulsedInstabilities in Rocket Motors: A Comparison betweenPredictions and Experiments,” Journal of Propulsion andPower, Vol. 4, No. 4, 1988, pp. 308-316.
66Baum, J. D., “Investigation of Flow TurningPhenomenon, Effects of Frequency and Blowing Rate,”AIAA Paper 89-0297, January 1989.
67Glick, R. L., and Renie, J. P., “On the NonsteadyFlowfield in Solid Rocket Motors,” AIAA Paper 84-1475,June 1984.
68Brown, R. S., Blackner, A. M., Willoughby, P. G., andDunlap, R., “Coupling between Acoustic VelocityOscillations and Solid Propellant Combustion,” Journal ofPropulsion and Power, Vol. 2, No. 5, 1986, pp. 428-437.
69Shaeffer, C. W., and Brown, R. S., “Oscillatory InternalFlow Field Studies,” United Technologies, AFOSR ContractRept. F04620-90-C-0032, San Jose, CA, August 1990.
70Shaeffer, C. W., and Brown, R. S., “Oscillatory InternalFlow Studies,” United Technologies, Chemical Systems Div.Rept. 2060 FR, San Jose, CA, August 1992.
71Cantrell, R. H., and Hart, R. W., “Interaction betweenSound and Flow in Acoustic Cavities: Mass, Momentum, andEnergy Considerations,” Journal of the Acoustical Society ofAmerica, Vol. 36, No. 4, 1964, pp. 697-706.
72Chester, W., “Resonant Oscillations in Closed Tubes,”Journal of Fluid Mechanics, Vol. 18, No. 1, 1964, pp. 44-64.
73Harrje, D. T., and Reardon, F. H., “Liquid PropellantRocket Combustion Instability,” NASA, Technical Rept. SP-194, July 1972.
74Levine, J. N. and Baum, J. D., “A Numerical Study ofNonlinear Instability Phenomena in Solid Rocket Motors,”AIAA Journal, Vol. 21, No. 4, 1983, pp. 557-564.

–18–American Institute of Aeronautics and Astronautics.
75Sirignano, W. A. and Crocco, L, “A Shock Wave Modelof Unstable Rocket Combustion,” AIAA Journal, Vol. Vol 2,No. No. 7, 1964.
76Kirchoff, G., Vorlesungen Über Mathematische Physik:Mechanik, 2nd ed., Teubner, Leibzig, 1877, pp. 311-336.
77Van Moorhem, W. K., “Flow Turning in Solid-PropellantRocket Combustion Stability Analyses,” AIAA Journal, Vol.20, No. 10, 1982, pp. 1420-1425.
78Flandro, G. A., and Roach, R. L., “Effects of VorticityProduction on Acoustic Waves in a Solid Propellant Rocket,”Air Force Office of Scientific Research, AFOSR Final Rept.2060 FR, Bolling AFB, DC, October 1992.
79Malhotra, S., “On Combustion Instability in Solid RocketMotors,” Dissertation, California Institute of Technology,2004.
80Van Moorhem, W. K., “An Investigation of the Origin ofthe Flow Turning Effect in Combustion Instability,” 17thJANNAF Combustion Conference, September 1980.
81Blomshield, F. S., Bicker, C. J., and Stalnaker, R. A.,“High Pressure Pulsed Motor Firing Combustion InstabilityInvestigations,” Proceedings of the 1996 Jannaf 33rdCombustion Meeting, Naval Postgraduate School, Monterey,CA, 1996.
82Blomshield, F. S., and Mathes, H. B., “PressureOscillations in Post-Challenger Space Shuttle RedesignedSolid Rocket Motors,” Journal of Propulsion and Power, Vol.9, No. 2, 1993, pp. 217-221.
83Flandro, G. A., Majdalani, J, and French, J., “NonlinearRocket Motor Stability Prediction: Limit Amplitude,Triggering, and Mean Pressure Shift,” AIAA Paper 2004-4054, 2004.
84Flandro, G. A., Majdalani, J, and French, J C.,“Incorporation of Nonlinear Capabilities in the StandardStability Prediction Program,” AIAA Paper 2004-4182, 2004.