
Aerodynamics and control in insect flight - aerosociety.com. Richard... · Insect flight as a model...
42
Aerodynamics and control in insect flight Richard J Bomphrey
Transcript of Aerodynamics and control in insect flight - aerosociety.com. Richard... · Insect flight as a model...

Aerodynamics and control in insect flight
Richard J Bomphrey

X ray; muscle physiology suite; GPS & IMU loggers; pressure measurement; force plates; bumpy treadmills; EMG; MRI; micro-CT; robotics; VR; light aircraft; flow tunnels;
The Structure and Motion Laboratory>800 m2 (and 600 m2 more this year)

Early days

aerodynamic forces
3D locomotion
rich sensory
input
neural control
activate muscles
wing morphology and kinematics
Insect flight as a model system
movie: J. Zeil

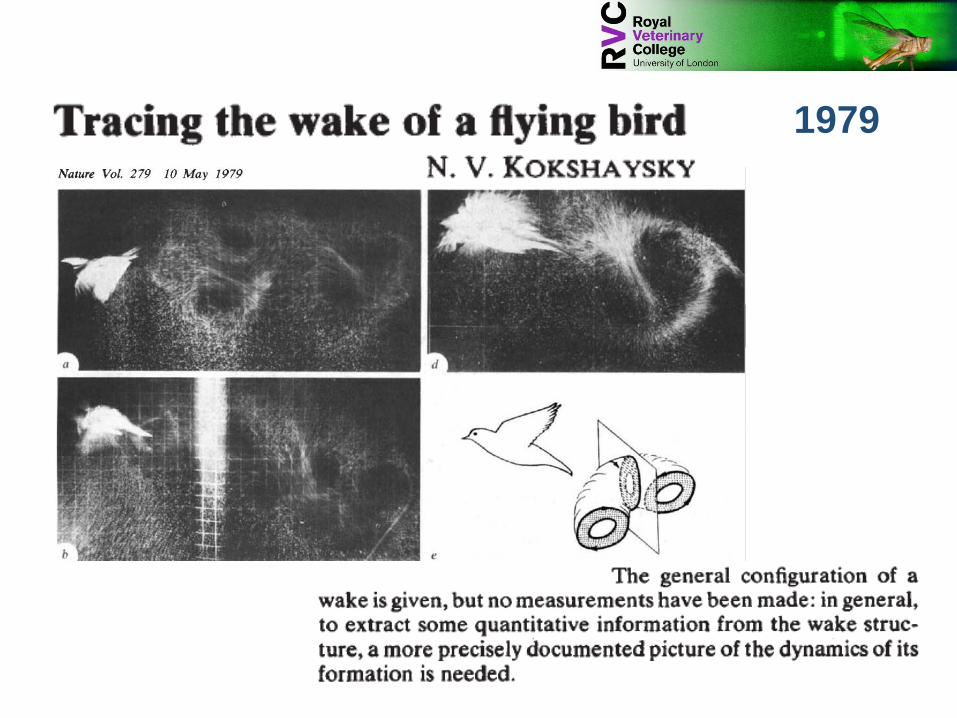
1979

900 stereo pairs
2500 bubble images in each stereo pair
5 stereo pairs fully analysed
1984

2005Tobacco hawkmoth vortex wake over a wingbeat cycle.

The flow around the wings and thorax of Manduca sexta in late downstroke.

The four classes of leading-edge vortex described to date.
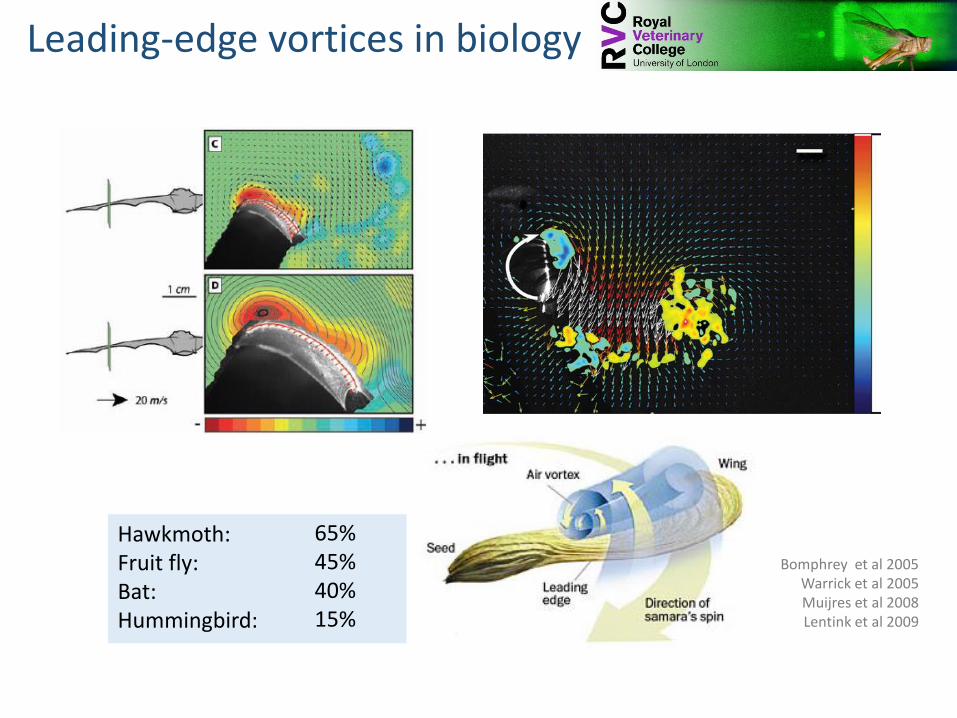
Bomphrey et al 2005Warrick et al 2005Muijres et al 2008Lentink et al 2009
Hawkmoth: Fruit fly:Bat:Hummingbird:
65%45%40%15%
Leading-edge vortices in biology

Walker et al JRS: Interface (2009)Young et al Science (2009)
Kinematics of the desert locust

Walker et al JRS: Interface (2009)Young et al Science (2009)
Kinematics of the desert locust

• CFD validated with close match
• Qualitative and quantitative agreement with full-fidelity model
• Kinematic parameters changed to test corrugation, twist, and bending in the wing…
CFD PIV smoke
Young et al Science (2009)
do
wn
was
h m
s-1
CFD of the desert locust
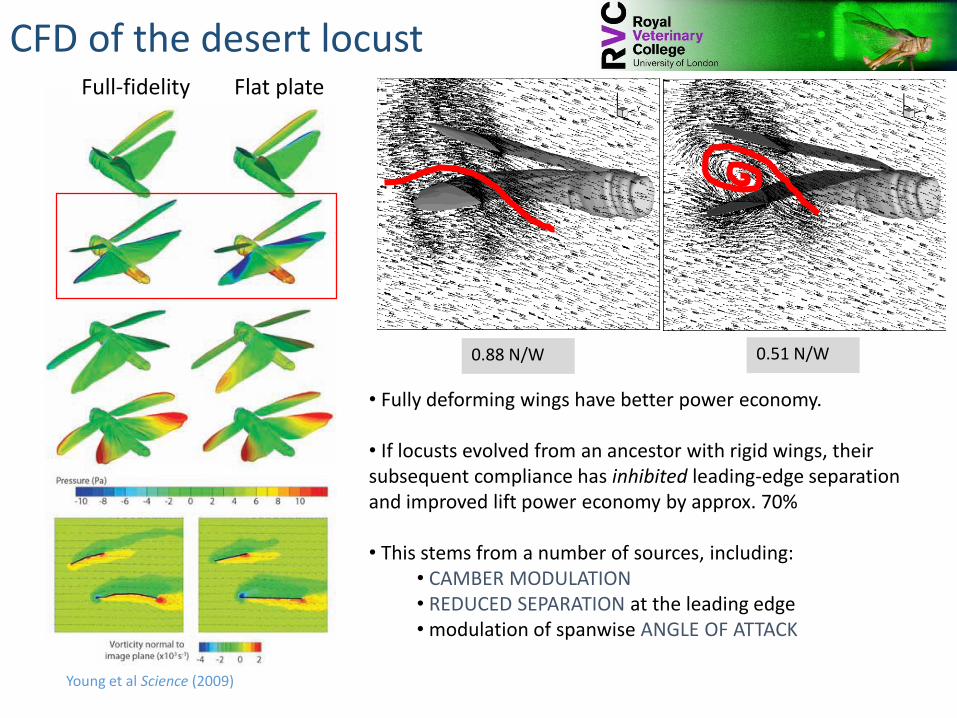
0.88 N/W 0.51 N/W
Full-fidelity Flat plate
• Fully deforming wings have better power economy.
• If locusts evolved from an ancestor with rigid wings, their subsequent compliance has inhibited leading-edge separation and improved lift power economy by approx. 70%
• This stems from a number of sources, including:• CAMBER MODULATION• REDUCED SEPARATION at the leading edge• modulation of spanwise ANGLE OF ATTACK
Young et al Science (2009)
CFD of the desert locust

Hoerner & Borst (1987)
Lift
Spanwise CL
Planform
Downwash angle
Span efficiency

ei=0.89
Span efficiency

Span efficiency: tr-PIV
Ever increasing detail of model species tells us relatively little compared with identifying trends and overarching themes.
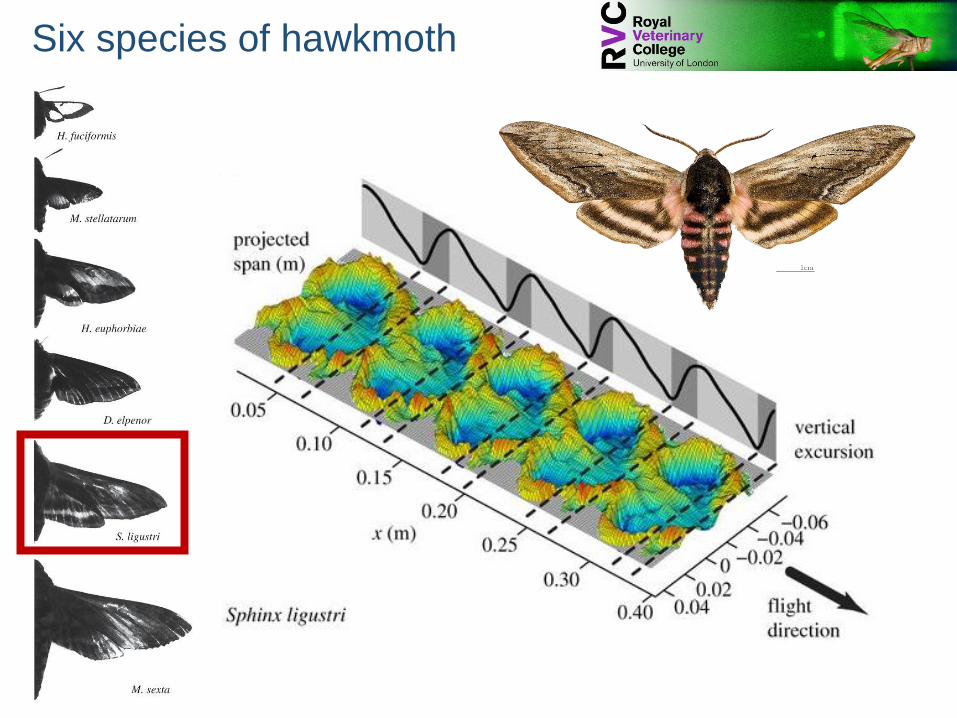
Six species of hawkmoth

Six species of hawkmoth

Advance ratio
Normalised lift
Six species of hawkmoth

Bomphrey R J et al Phil Trans Roy Soc B ( invited for 2016)
Six species of Odonata

P. Henningsson (photo: A. Hedenström)
Swift aerodynamics
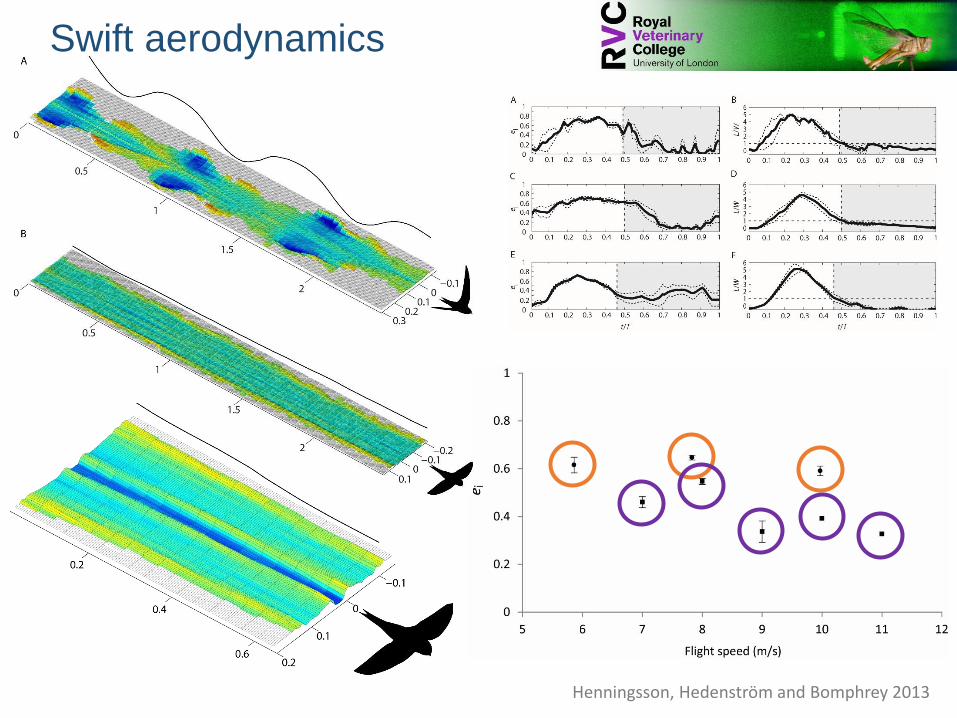
Swift aerodynamics
Henningsson, Hedenström and Bomphrey 2013
sensory systems
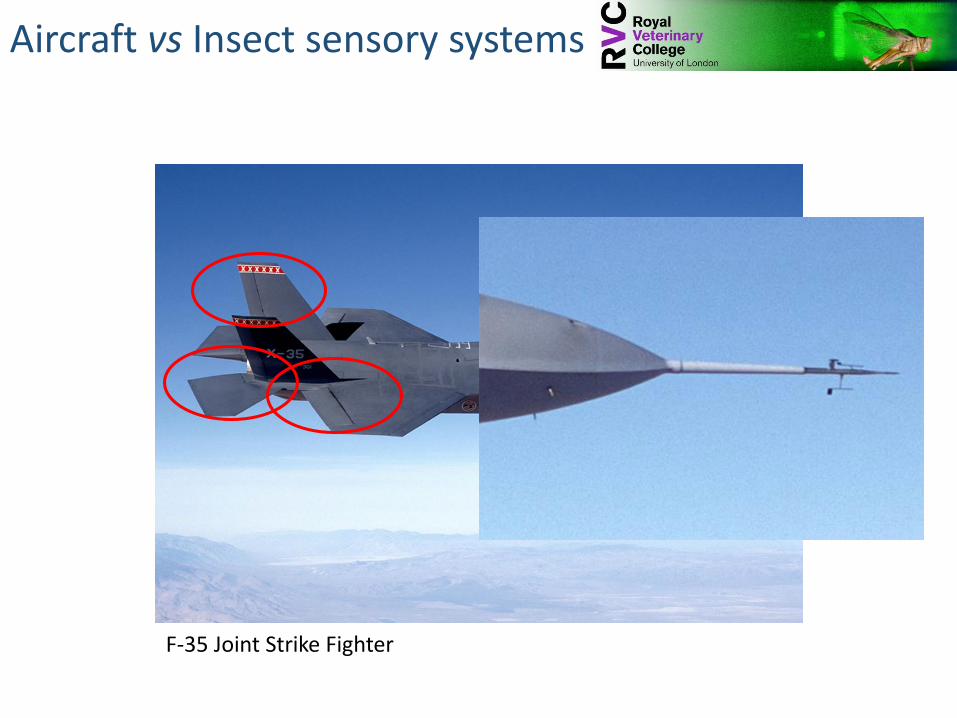
Aircraft vs Insect sensory systems
F-35 Joint Strike Fighter

In contrast, insect sensory systems are highly non-orthogonal
Compound eyeKevin McKenzie, University of Aberdeen
Fly wing hairswww.bugscope.itg.uiuc.edu
Haltereswww.ento.csiro.au
Aircraft vs Insect sensory systems

BBC

Optic Flow

Krapp, 1996Mode Sensing Hypothesis: Krapp, Taylor & Humbert, 2012
Optic Flow

1. Glide: stable
2. The Phugoid- unstable oscillatory modeexchange of kinetic and potential energy
3. Banked Turn; Spiral mode- unstable divergent mode
..there are others
Trade-off Modes of motion
Flight control – two concepts

How is the flight control related to flight dynamics?
© Charles W. Melton
What visual information is important to insects for controlling their flight?
Flight control: example questions
Windsor, Bomphrey and Taylor, 2013
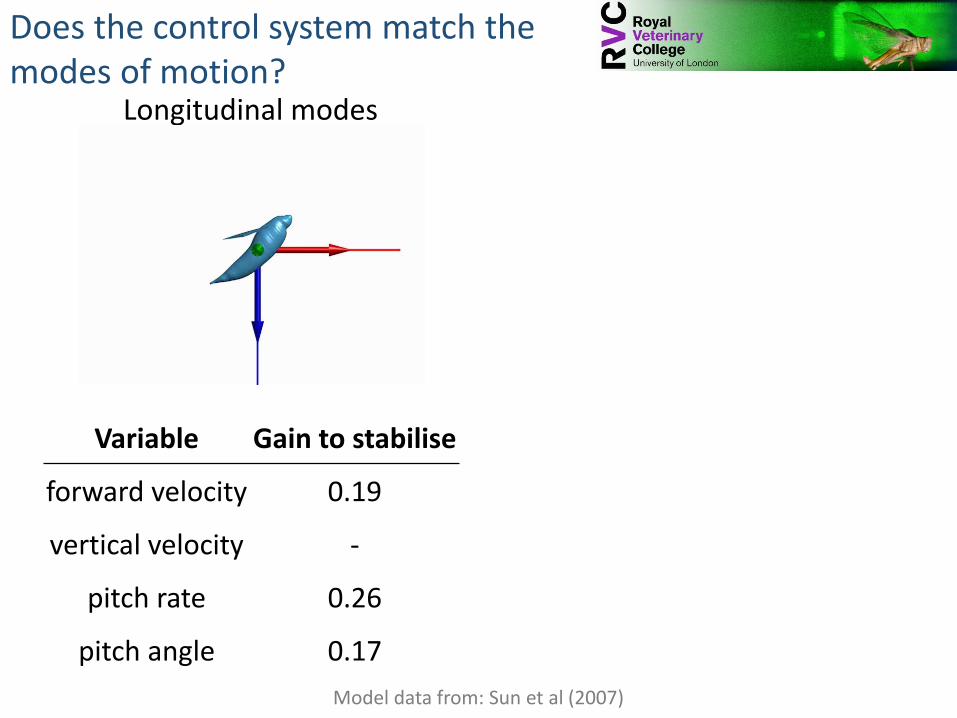
Variable Gain to stabilise
forward velocity 0.19
vertical velocity -
pitch rate 0.26
pitch angle 0.17
Longitudinal modes
Model data from: Sun et al (2007)
Does the control system match the modes of motion?
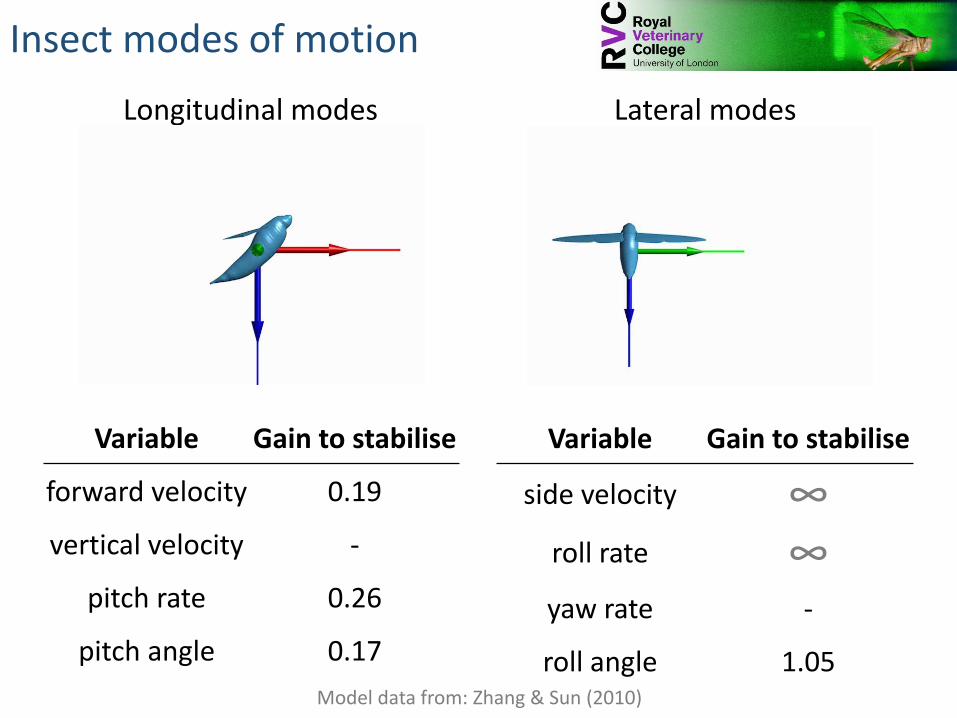
Variable Gain to stabilise
forward velocity 0.19
vertical velocity -
pitch rate 0.26
pitch angle 0.17
Longitudinal modes
Variable Gain to stabilise
side velocity ∞roll rate ∞yaw rate -
roll angle 1.05
Lateral modes
Model data from: Zhang & Sun (2010)
Insect modes of motion

Sensory input
Force output
Flight control system
Black box approach
Windsor, Bomphrey and Taylor (2013)
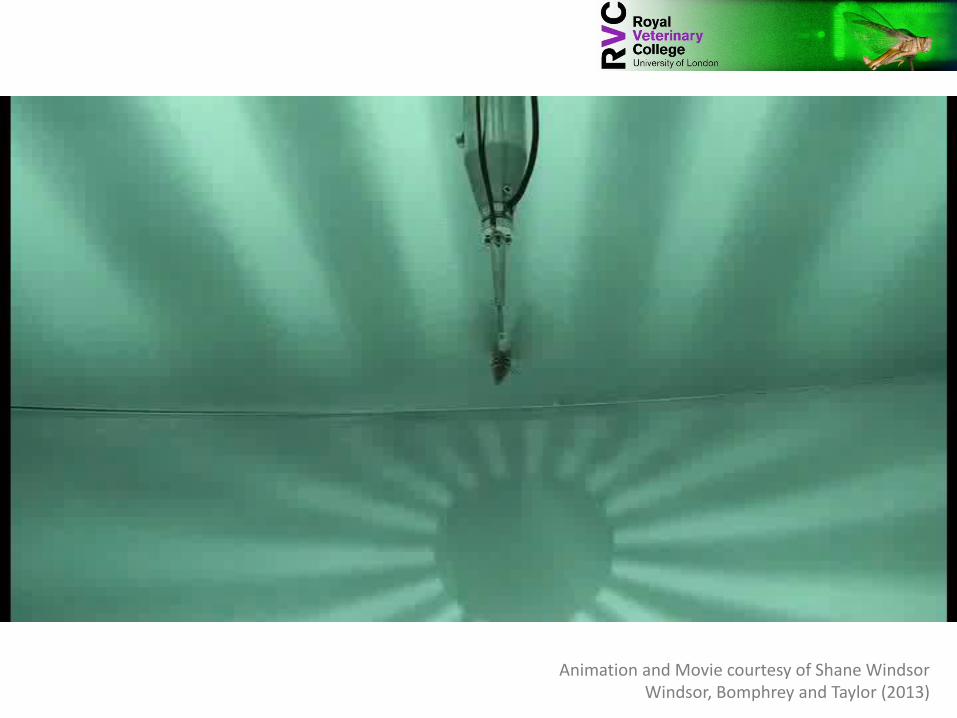
Windsor, Bomphrey and Taylor (2013)Animation and Movie courtesy of Shane Windsor
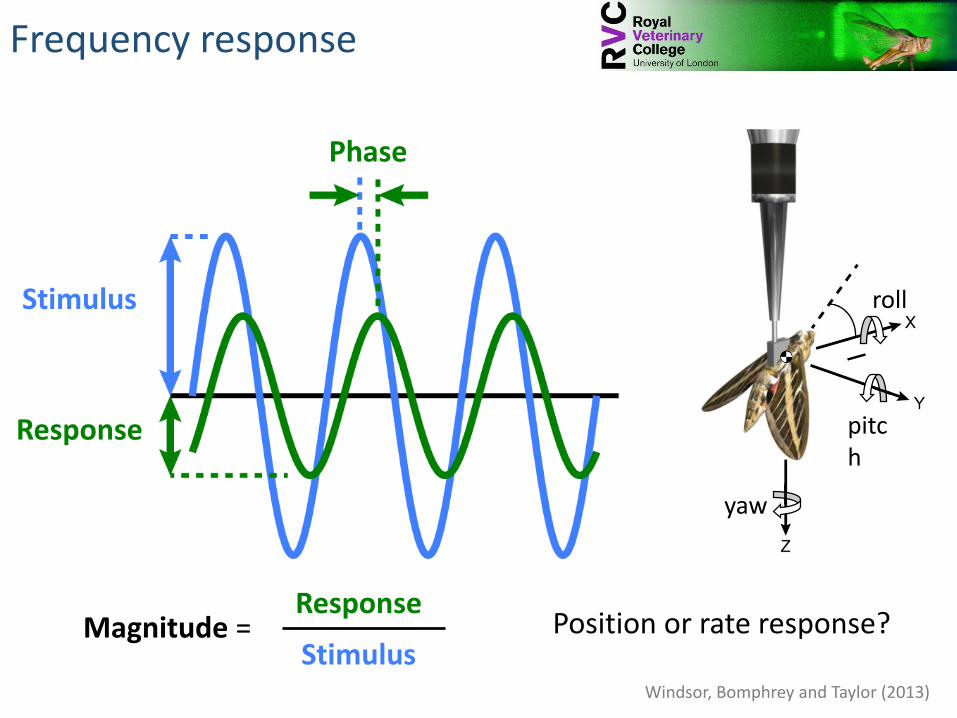
Stimulus
Response
Phase
Magnitude =Stimulus
Response
roll
pitch
yaw
Frequency response
Position or rate response?
Windsor, Bomphrey and Taylor (2013)

AxisWhat is required to stabilise flight?
Measured response
Roll Roll angle Roll angle
PitchPitch anglePitch rate
Forward velocity
Pitch anglePitch rate
Yaw Passively stableYaw angleYaw rate
Axis comparison
Windsor, Bomphrey and Taylor (2013)

movie: T. Nakata

Dr Toshiyuki Nakata (Postdoc)
Dr Nathan Phillips (Postdoc)
Dr Jorn Cheney (Postdoc)
Ms Florence Albert-Davie (PhD student)
Ms Hannah Safi (PhD student)
Mr Fergus McCorkell (Dphil student)
ALUMNI
Dr Per Henningsson






![[2] the Aerodynamics of Hovering Insect Flight I. the Quasi-Steady Analysis](https://static.fdocuments.net/doc/165x107/577d21f01a28ab4e1e963cee/2-the-aerodynamics-of-hovering-insect-flight-i-the-quasi-steady-analysis.jpg)











