Advisor: I. M. Navon · 2014. 4. 28. · MLEF is a hybrid ensemble filter that directly minimizes...
1
Conclusions and Future Work The Weather Research and Forecasting model (WRF) has proven to be adequate for the purposes of pro- viding an estimate of the wind speed as well as the uncertainty associated with this prediction (see figure 3). This will be beneficial for the unit commitment problem of wind turbines. We would also like to ex- tend this study to predict fields such as temperature, net solar radiation, relative humidity, and precipita- tion. This can be used to predict the power consump- tion as well as potential power output and potentially hasten the adoption of solar power as well. Data assimilation improves this prediction and gives results consistent with metereological observations. We are currently in the process of comparing data as- similation of WRF using 4DVar, EnKF, and MLEF in the presence of discontinuities. We will also investi- gate nested grid data assimilation methods combining state vectors and seeking combined covariance matri- ces. We anticipate that our study will further the state of knowledge of data assimilation and expedite the adoption of green power in the United States. Figure 3: Wind speed validation at 10m above ground at the Argonne MET tower site. The red line represents the ensemble mean, the blue line represents the unperturbed solution, the black line represents the actual observations. The red shaded area represents a confidence interval of two stan- dard deviations. Nonsmooth Optimization A nonsmooth optimization (NSO) problem is one where the function or its derivatives have discontinu- ities. This is an important issue because NSO problems often arise in nature. For example, in attempting to assimilate satellite radiance observations, a discontinuity is introduced by the existence of clouds. Much of the traditional mathematical theory of optimization, built upon the assumption of smoothness, cannot be used to prove convergence results. However, preliminary results show that modifying current optimization algorithms to pay close attention to issues of convergence can have significant payoff. Two main classes of optimization algorithms, bundle and subgradient methods, show significant promise. Maximum Likelihood Ensemble Filter MLEF is a hybrid ensemble filter that directly minimizes the likelihood of the posterior pdf directly in a manner reminiscent of 3DVar (4DVar without the time dependence). It takes several best practices from other ensemble filter methods, including: • Using reduced-rank square-root forecast ( ˆ P 1/2 i ) and analysis (P 1/2 i ) error covariances • Minimizing the maximum likelihood problem J (x)= 1 2 (x - x b ) T B -1 (x - x b )+(y - H [x]) T R -1 (y - H [x]) – here the definitions are the same as in 4DVar and EnKF, but H is in general non-linear observation operator and the observations are only for the current timestep – uses conjugate gradient to solve the optimization problem • Sophisticated Hessian preconditioning • Calculates the square-root analysis error covariance in a manner similar to Ensemble Transform Kalman Filter (ETKF) 3DVar and 4DVar Ensemble Kalman Filter The Kalman filter is the optimal predictor of state given that the model and observation operator are linear and the errors are Gaussian. The algorithm has two steps: predict and update. • Predict: – Prediction state: ˆ x i = F i x i-1 – Prediction covariance: ˆ P i = F i P i-1 F T i • Update: – Innovation: z i = y i - H i ˆ x i – Innovation covariance: S i = H i ˆ P i H T i + R i – Kalman gain: K i = ˆ P i H T i S -1 i – Analysis state: x i =ˆ x i + K i z i – Analysis covariance: P i =(I - K i H i ) ˆ P i Here the variables are the same as in 4DVar except: • P 0 = B and P i is the analysis error covariance at time i • H i and F i are the linearized observation and model operators, respectively The Ensemble Kalman Filter is a modification of the Kalman filter. In an application such as numerical weather prediction, there are thousands or even millions of state variables. Forming the covariance matrix directly would be prohibitive, and thus an ensemble of Monte Carlo runs are used to to produce a low- rank sample estimate of the error covariance matrices. It also allows one to use the in general nonlinear model. 4DVar data assimilation In order to improve forecasts, data assimilation is used to integrate observations with the model prediction to come up with an optimal estimate of the state. This is accomplished by minimizing a the constrained cost function: J (x)=(x - x b ) T B -1 (x - x b )+ n X i=0 (y i - H i [x i ]) T R -1 i (y i - H i [x i ]) subject to the constraint x i = F i (x i-1 ), x 0 = x Where: • x is the initial model state, the independent variable • x b is the background prediction (from a previous analysis cycle) • B is the background covariance matrix • y i is the observation of the state of the model at time i • x i is the model state at time i with the strong constraint x i = F i (x i-1 ) • H i is the (generally non-linear) observation operator at time i • F i is the (generally non-linear) model operator at time i • R i is the observation covariance matrix at time i • n is the number of observation batches (time steps that have observations) • The Hessian of J at the minimum gives the uncertainty (i.e. B 0 = ∇ 2 J (x * ), x * = arg min J (x)) Figure 2: The mean wind and pressure stdev Figure 1: Validation test nested domains WRF Model WRF is a mesoscale NWP system based on finite volume/finite difference developed jointly by NCAR, NOAA, NCEP, the University of Oklahoma and other agencies. The WRF model is a fully compressible, and nonhydrostatic model that uses: • a terrain-following hydrostatic pressure as the vertical coordinate • grid staggering for the wind components • Runge-Kutta 2nd and 3rd order time integration schemes • 2nd to 6th order advection schemes in both horizontal and vertical directions • a time-split small step for acoustic and gravity-wave modes • extensive physical modeling such as long- and shortwave radiation, cumulus, microphysics, etc. • allows nested domains (see figure 1) Wind energy unit commitment The United States DoE has set the goal of 20% of electrical power from wind by the year 2020. The unit commitment problem involves the following considerations: • The power cannot drop below a given threshold • Coal plants: – pollute and have a large carbon footprint – have a reliable energy output – require time to switch on and off • Wind turbines: – have no carbon footprint – have a power curve that depends on the wind speed – create power with variable/unreliable intensity The problem is to maximize wind turbine usage without going below the threshold by committing wind turbines and coal plants over the next 24 hours. To do this, a prediction of the wind speed as well as an accurate estimate of the uncertainty must be provided. ———————————————————————————————————————————————————————————————————————————————————————————– Abstract The United States Department of Energy has targeted 20% wind power penetration by 2020. Accurate numerical wind speed prediction is an important step to increasing the prevalence of wind energy. Less coal plants can be committed to producing energy if wind speeds can be reliably forecast at the production site, but an uncertainty estimate of the wind speed prediction is necessary to solve the stochastic programming problem and ensure power needs are met. At Argonne National Laboratory, the Weather Research and Forecasting (WRF) model is used to predict wind speed at turbine locations as well as produce an uncertainty estimate. Data assimilation in time (4DDA) of meteorological observations are used with the EnKF (Ensemble Kalman Filter) and Maximum Likelihood Ensemble Filter (MLEF) to improve predictions by finding optimal or near-optimal estimates of model state. The EnKF is an ensemble method that assumes that the model probability distribution is Gaussian and linearizes the model and observation operators. Unlike the Kalman filter, EnKF evolves the covariance using sampling techniques rather than forming the state covariance directly, but like Kalman filters, the observation operator must be linearized. MLEF is an ensemble filter that minimizes a cost function that maximizes the likelihood of the posterior distribution. Unlike the EnKF, the fully nonlinear observation operator can be used, which is suitable for highly nonlinear observation operators. The goal of this project is to extend the MLEF to non-smooth and non-differentiable observation operators such as cloud cover, radar and satellite. Integrating non-smooth observations from radar or satellite will further improve the prediction skill of the model. Future work includes further improvements in data assimilation as well as using the system to predict fields such as temperature, net solar radiation, relative humidity, and precipitation. These fields can be used for the purpose of predicting consumer power demand, solar power output, and potentially several other energy-related areas. Advisor: I. M. Navon Jeff Steward & Emil Constantinescu Improving Wind Power Unit Commitment with Nonsmooth Data Assimilation Dept. of Scientific Computing Florida State University Argonne National Laboratory
Transcript of Advisor: I. M. Navon · 2014. 4. 28. · MLEF is a hybrid ensemble filter that directly minimizes...

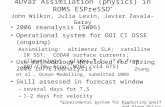
Conclusions and Future WorkThe Weather Research and Forecasting model (WRF)has proven to be adequate for the purposes of pro-viding an estimate of the wind speed as well as theuncertainty associated with this prediction (see figure3). This will be beneficial for the unit commitmentproblem of wind turbines. We would also like to ex-tend this study to predict fields such as temperature,net solar radiation, relative humidity, and precipita-tion. This can be used to predict the power consump-tion as well as potential power output and potentiallyhasten the adoption of solar power as well.
Data assimilation improves this prediction and givesresults consistent with metereological observations.We are currently in the process of comparing data as-similation of WRF using 4DVar, EnKF, and MLEF inthe presence of discontinuities. We will also investi-gate nested grid data assimilation methods combiningstate vectors and seeking combined covariance matri-ces. We anticipate that our study will further the stateof knowledge of data assimilation and expedite theadoption of green power in the United States.
Figure 3: Wind speed validation at 10m aboveground at the Argonne MET tower site. The redline represents the ensemble mean, the blue linerepresents the unperturbed solution, the black linerepresents the actual observations. The red shadedarea represents a confidence interval of two stan-dard deviations.
Nonsmooth OptimizationA nonsmooth optimization (NSO) problem is one where the function or its derivatives have discontinu-ities. This is an important issue because NSO problems often arise in nature. For example, in attemptingto assimilate satellite radiance observations, a discontinuity is introduced by the existence of clouds.Much of the traditional mathematical theory of optimization, built upon the assumption of smoothness,cannot be used to prove convergence results. However, preliminary results show that modifying currentoptimization algorithms to pay close attention to issues of convergence can have significant payoff. Twomain classes of optimization algorithms, bundle and subgradient methods, show significant promise.
Maximum Likelihood Ensemble FilterMLEF is a hybrid ensemble filter that directly minimizes the likelihood of the posterior pdf directly in amanner reminiscent of 3DVar (4DVar without the time dependence). It takes several best practices fromother ensemble filter methods, including:
•Using reduced-rank square-root forecast (P̂1/2i ) and analysis (P1/2
i ) error covariances
•Minimizing the maximum likelihood problem
J(x) =1
2(x− xb)
TB−1(x− xb) + (y −H [x])TR−1(y −H [x])
– here the definitions are the same as in 4DVar and EnKF, but H is in general non-linear observationoperator and the observations are only for the current timestep
– uses conjugate gradient to solve the optimization problem
• Sophisticated Hessian preconditioning
• Calculates the square-root analysis error covariance in a manner similar to Ensemble Transform KalmanFilter (ETKF)
3DVar and 4DVar
Ensemble Kalman FilterThe Kalman filter is the optimal predictor of state given that the model and observation operator are linearand the errors are Gaussian. The algorithm has two steps: predict and update.
• Predict:
– Prediction state: x̂i = Fixi−1
– Prediction covariance: P̂i = FiPi−1FTi
•Update:
– Innovation: zi = yi −Hix̂i
– Innovation covariance: Si = HiP̂iHTi + Ri
– Kalman gain: Ki = P̂iHTi S−1
i– Analysis state: xi = x̂i + Kizi
– Analysis covariance: Pi = (I−KiHi)P̂i
Here the variables are the same as in 4DVar except:
•P0 = B and Pi is the analysis error covariance at time i
•Hi and Fi are the linearized observation and model operators, respectively
The Ensemble Kalman Filter is a modification of the Kalman filter. In an application such as numericalweather prediction, there are thousands or even millions of state variables. Forming the covariance matrixdirectly would be prohibitive, and thus an ensemble of Monte Carlo runs are used to to produce a low-rank sample estimate of the error covariance matrices. It also allows one to use the in general nonlinearmodel.
4DVar data assimilationIn order to improve forecasts, data assimilation is used to integrate observations with the model predictionto come up with an optimal estimate of the state. This is accomplished by minimizing a the constrainedcost function:
J(x) = (x− xb)TB−1(x− xb) +
n∑i=0
(yi −Hi[xi])TR−1
i (yi −Hi[xi])
subject to the constraint xi = Fi(xi−1), x0 = x
Where:
• x is the initial model state, the independent variable
• xb is the background prediction (from a previous analysis cycle)
•B is the background covariance matrix
• yi is the observation of the state of the model at time i
• xi is the model state at time i with the strong constraint xi = Fi(xi−1)
•Hi is the (generally non-linear) observation operator at time i
• Fi is the (generally non-linear) model operator at time i
•Ri is the observation covariance matrix at time i
• n is the number of observation batches (time steps that have observations)
• The Hessian of J at the minimum gives the uncertainty (i.e. B′ = ∇2J(x∗),x∗ = arg min J(x))
Figure 2: The mean wind and pressure stdevFigure 1: Validation test nested domains
WRF ModelWRF is a mesoscale NWP system based on finite volume/finite difference developed jointly by NCAR,NOAA, NCEP, the University of Oklahoma and other agencies. The WRF model is a fully compressible,and nonhydrostatic model that uses:
• a terrain-following hydrostatic pressure as the vertical coordinate
• grid staggering for the wind components
• Runge-Kutta 2nd and 3rd order time integration schemes
• 2nd to 6th order advection schemes in both horizontal and vertical directions
• a time-split small step for acoustic and gravity-wave modes
• extensive physical modeling such as long- and shortwave radiation, cumulus, microphysics, etc.
• allows nested domains (see figure 1)
Wind energy unit commitmentThe United States DoE has set the goal of 20% of electrical power from wind by the year 2020. The unitcommitment problem involves the following considerations:
• The power cannot drop below a given threshold
• Coal plants:
– pollute and have a large carbon footprint– have a reliable energy output– require time to switch on and off
•Wind turbines:
– have no carbon footprint– have a power curve that depends on the wind speed– create power with variable/unreliable intensity
The problem is to maximize wind turbine usage without going below the threshold by committing windturbines and coal plants over the next 24 hours. To do this, a prediction of the wind speed as well as anaccurate estimate of the uncertainty must be provided.
———————————————————————————————————————————————————————————————————————————————————————————–
Abstract The United States Department of Energy has targeted 20% wind power penetration by 2020. Accurate numerical wind speed prediction is animportant step to increasing the prevalence of wind energy. Less coal plants can be committed to producing energy if wind speeds can be reliably forecastat the production site, but an uncertainty estimate of the wind speed prediction is necessary to solve the stochastic programming problem and ensurepower needs are met. At Argonne National Laboratory, the Weather Research and Forecasting (WRF) model is used to predict wind speed at turbinelocations as well as produce an uncertainty estimate. Data assimilation in time (4DDA) of meteorological observations are used with the EnKF (EnsembleKalman Filter) and Maximum Likelihood Ensemble Filter (MLEF) to improve predictions by finding optimal or near-optimal estimates of model state.The EnKF is an ensemble method that assumes that the model probability distribution is Gaussian and linearizes the model and observation operators.Unlike the Kalman filter, EnKF evolves the covariance using sampling techniques rather than forming the state covariance directly, but like Kalman filters,the observation operator must be linearized. MLEF is an ensemble filter that minimizes a cost function that maximizes the likelihood of the posteriordistribution. Unlike the EnKF, the fully nonlinear observation operator can be used, which is suitable for highly nonlinear observation operators. Thegoal of this project is to extend the MLEF to non-smooth and non-differentiable observation operators such as cloud cover, radar and satellite. Integratingnon-smooth observations from radar or satellite will further improve the prediction skill of the model. Future work includes further improvements in dataassimilation as well as using the system to predict fields such as temperature, net solar radiation, relative humidity, and precipitation. These fields can beused for the purpose of predicting consumer power demand, solar power output, and potentially several other energy-related areas.
Advisor: I. M. Navon
Jeff Steward & Emil Constantinescu
Improving Wind Power Unit Commitmentwith Nonsmooth Data Assimilation
Dept. of Scientific ComputingFlorida State University
Argonne National Laboratory