
Adaptive Robust Repetitive Control of ... - Purdue Engineeringbyao/Papers/AIM01_motor.pdf ·...
6
Adaptive Robust Repetitive Control of A Class of Nonlinear Systems in Normal Form with Applications to Motion Control of Linear Motors Li Xu Bin Yao Purdue University School of Mechanical Engineering West Lafayette, IN 47907, USA Abstract—In this paper, the idea of adaptive robust control (ARC) is integrated with a repetitive control algorithm to construct a performance oriented control law for a class of nonlinear systems in the presence of both repeatable and non-repeatable uncertain nonlinearities. All the uncertain- ties are assumed to be bounded by certain known bounding functions. The repetitive control algorithm is used to learn and approximate the unknown repeatable nonlinearities, but with physically intuitive discontinuous pro- jection modifications ensuring that all the function estimates are within the known bounds. Robust terms are constructed to attenuate the effect of var- ious uncertainties including non-repeatable uncertainties effectively for a guaranteed transient performance and a guaranteed final tracking accu- racy in general. Theoretically, in the presence of repeatable uncertainties only, asymptotic output tracking is also achieved without using an infinite fast switching control law or an infinite-gain feedback. The motion con- trol of a linear motor drive system is used as an application example, and experimental results are presented to show the effectiveness of the scheme. I. I NTRODUCTION When the dynamic model of a nonlinear system is known pre- cisely, many model-based control theories and design methods can be used to develop nonlinear controllers [1] for trajectory tracking. However, due to the model uncertainties, it is difficult to derive the exact description of the system. Recently, there have been many studies in the topic of “repetitive control” for controlling of mechanical systems in an iterative manner [2]- [5]. Repetitive control schemes are easy to implement and do not require exact knowledge of the dynamic model. This control concept arises from the recognition that many tracking systems, such as computer disk drives, rotation machine tools, or robots, have to deal with periodic reference and/or disturbance signals. The basic idea of repetitive control is to improve the tracking performance from one cycle to the next by adjusting the input based on the error signals between the desired motion and the actual motion of the system from the previous cycles. With con- secutive iterations, the system is expected to eventually learn the task, and execute the motion without any error. The repet- itive control is similar to the iterative learning [5]-[8] scenario, where the desired trajectory is given in a finite time interval and the same initial setting is required at every learning trial. Due to the difficulty of stability analysis, repetitive control has been primarily applied to linear systems [2], [3] or lineariz- able nonlinear systems. The first rigorous stability analysis of a nonlinear repetitive controller was presented in [4]. However, the proposed control law could not handle model uncertainties The work is supported in part by the National Science Foundation under the CAREER grant CMS-9734345 and in part by a grant from Purdue Research Foundation. such as exogenous disturbances which might not be periodic. Realizing this, the authors added a projection mapping in the “learning” algorithm in order to guarantee the boundness of the repetitive estimate. Although this ad hoc method was very im- portant and useful from an implementation point of view, it was not well justified theoretically. Recently, Xu et al. proposed a robust learning control scheme [9] by combining the design methods of variable structure control with iterative learning con- trol straightforwardly. However, the transient performance of this controller was unknown. The actual system may have large tracking errors during the initial transient period or have a slug- gish response. The control law also involved switching in or- der to achieve asymptotic tracking, which introduces chattering. Although chattering can be avoided by using some smooth tech- niques [10], the convergence of the tracking errors to zero was no longer possible, even when the system is subjected to re- peatable uncertainties only. Furthermore, the learning algorithm may still go unbounded under certain circumstances. In this paper, we consider a class of nonlinear systems similar to those in [9]. The idea of ARC is adopted to construct a perfor- mance oriented adaptive robust repetitive control law. Like the robust learning control design in [9], we use the repetitive con- trol technique to learn and eliminate the periodic uncertainties as much as possible while employing robust feedback to handle the non-periodic uncertainties. However, our approach is more than just simply putting these two schemes together. Specifically, based on the available bounds on the repeatable uncertainties, the widely used discontinuous projection mapping is utilized to modify the learning algorithm proposed in [2], which guarantees that the repetitive estimates belong to a known bounded region all the time no matter if the system is subject to non-repeatable disturbances or not. As a result, the possible destabilizing effect of the on-line learning in the presence of non-repeatable model uncertainties is avoided, and certain simple robust feedback can be synthesized to attenuate the effect of both repeatable and non- repeatable uncertain nonlinearities effectively for a guaranteed output tracking transient and final tracking accuracy in general. Furthermore, in the presence of periodic uncertain nonlineari- ties only, asymptotic output tracking is achieved. Experiment results will be provided to illustrate the effectiveness and the high-performance nature of the proposed adaptive robust repet- itive control scheme. 527 527
Transcript of Adaptive Robust Repetitive Control of ... - Purdue Engineeringbyao/Papers/AIM01_motor.pdf ·...

AdaptiveRobust RepetitiveControl of A Classof Nonlinear SystemsinNormal Form with Applications to Motion Control of Linear Motors
Li Xu Bin Yao
PurdueUniversitySchoolof MechanicalEngineering
WestLafayette,IN 47907,USA !"
Abstract— In this paper, the idea of adaptive robust control (ARC) isintegrated with a repetitive control algorithm to construct a performanceoriented control law for a classof nonlinear systemsin the presenceof bothrepeatableand non-repeatableuncertain nonlinearities. All the uncertain-ties are assumedto beboundedby certain known bounding functions. Therepetitive control algorithm is usedto learn and approximate the unknownrepeatablenonlinearities, but with physically intuiti ve discontinuouspro-jection modifications ensuring that all the function estimatesare within theknown bounds.Robust terms areconstructedto attenuatethe effectof var-ious uncertainties including non-repeatableuncertainties effectively for aguaranteed transient performance and a guaranteed final tracking accu-racy in general. Theoretically, in the presenceof repeatableuncertaintiesonly, asymptotic output tracking is alsoachieved without using an infinitefast switching control law or an infinite-gain feedback. The motion con-tr ol of a linear motor dri ve systemis usedasan application example,andexperimental resultsarepresentedto show the effectivenessof the scheme.
I . INTRODUCTION
Whenthedynamicmodelof anonlinearsystemis knownpre-cisely, many model-basedcontrol theoriesanddesignmethodscanbe usedto develop nonlinearcontrollers[1] for trajectorytracking.However, dueto themodeluncertainties,it is difficultto derive the exact descriptionof the system. Recently, therehave beenmany studiesin the topic of “repetitive control” forcontrolling of mechanicalsystemsin an iterative manner[2]-[5]. Repetitive control schemesareeasyto implementanddonotrequireexactknowledgeof thedynamicmodel.Thiscontrolconceptarisesfrom therecognitionthatmany trackingsystems,suchascomputerdisk drives,rotationmachinetools,or robots,have to dealwith periodicreferenceand/ordisturbancesignals.The basicideaof repetitive control is to improve the trackingperformancefrom onecycle to the next by adjustingthe inputbasedon the error signalsbetweenthe desiredmotion andtheactualmotionof thesystemfrom thepreviouscycles.With con-secutive iterations,the systemis expectedto eventually learnthe task,andexecutethe motion without any error. The repet-itive control is similar to the iterative learning[5]-[8] scenario,wherethedesiredtrajectoryis givenin a finite time interval andthesameinitial settingis requiredat every learningtrial.
Due to the difficulty of stability analysis,repetitive controlhasbeenprimarily appliedto linearsystems[2], [3] or lineariz-ablenonlinearsystems.The first rigorousstability analysisofa nonlinearrepetitivecontrollerwaspresentedin [4]. However,the proposedcontrol law couldnot handlemodeluncertainties
The work is supportedin partby theNationalScienceFoundationundertheCAREER grant CMS-9734345and in part by a grant from PurdueResearchFoundation.
5252
suchas exogenousdisturbanceswhich might not be periodic.Realizingthis, the authorsaddeda projectionmappingin the“learning” algorithmin orderto guaranteetheboundnessof therepetitive estimate.Althoughthis ad hocmethodwasvery im-portantandusefulfrom animplementationpointof view, it wasnot well justified theoretically. Recently, Xu et al. proposeda robust learningcontrol scheme[9] by combiningthe designmethodsof variablestructurecontrolwith iterativelearningcon-trol straightforwardly. However, the transientperformanceofthis controllerwasunknown. Theactualsystemmayhave largetrackingerrorsduringtheinitial transientperiodor havea slug-gish response.The control law also involved switching in or-derto achieveasymptotictracking,which introduceschattering.Althoughchatteringcanbeavoidedby usingsomesmoothtech-niques[10], theconvergenceof the trackingerrorsto zerowasno longer possible,even when the systemis subjectedto re-peatableuncertaintiesonly. Furthermore,thelearningalgorithmmaystill go unboundedundercertaincircumstances.
In thispaper, weconsideraclassof nonlinearsystemssimilarto thosein [9]. Theideaof ARC is adoptedto constructaperfor-manceorientedadaptive robust repetitive control law. Like therobust learningcontroldesignin [9], we usetherepetitive con-trol techniqueto learnandeliminatetheperiodicuncertaintiesasmuchaspossiblewhile employing robustfeedbackto handlethenon-periodicuncertainties.However, ourapproachis morethanjust simply putting thesetwo schemestogether. Specifically,basedon the availableboundson the repeatableuncertainties,thewidely useddiscontinuousprojectionmappingis utilized tomodify thelearningalgorithmproposedin [2], whichguaranteesthat the repetitive estimatesbelongto a known boundedregionall the time no matterif thesystemis subjectto non-repeatabledisturbancesor not. As aresult,thepossibledestabilizingeffectof theon-linelearningin thepresenceof non-repeatablemodeluncertaintiesis avoided,andcertainsimplerobustfeedbackcanbesynthesizedto attenuatetheeffectof bothrepeatableandnon-repeatableuncertainnonlinearitieseffectively for a guaranteedoutputtrackingtransientandfinal trackingaccuracy in general.Furthermore,in the presenceof periodicuncertainnonlineari-ties only, asymptoticoutput tracking is achieved. Experimentresultswill be provided to illustrate the effectivenessand thehigh-performancenatureof theproposedadaptive robustrepet-itivecontrolscheme.
77

I I . DISCONTIUNOUS PROJECTION BASED ADAPTIVE
ROBUST REPETITIVE CONTROL
In this section,tracking control of a simple first-ordersys-temwill beusedto illustratethediscontinuousprojectionbasedadaptive robust repetitive control. The systemis assumedtohave thefollowing form
x # ϕ $ x%'& u & d $ x ( t % (1)
wherex ) IR is thestateof thesystem,u ) IR is thecontrol in-put,ϕ ) IR representsanunknownnonlinearfunctionandd $ x ( t %representsthe lumpedmodelingerror and exogenuousdistur-bances.Thecontrolobjectiveis to synthesizeaboundedcontrolinput u suchthatx tracksa desiredtrajectoryxd $ t % ascloselyaspossible.To achievethisobjective,weneedto makethefollow-ing reasonableandpracticalassumptions:
Assumption1: Theunknown functionsareboundedby someknown functions,i.e.,
ϕ $ x%*) Ωϕ∆#,+ ϕ : ϕmin $ x%.- ϕ $ x%- ϕmax $ x%0/1( (2)
d $ x ( t %*) Ωd∆#,+ d : 2 d $ x ( t %324- dmax $ x ( t %5/1( (3)
whereϕmin $ x% , ϕmax $ x% anddmax $ x ( t % areknown.In the above andthroughoutthe paper, the following notationswill be used: 6 min for the minimum value of 6 , 6 max for themaximumvalue of 6 , and the operation - for two vectorsisperformedin termsof thecorrespondingelementsof thevectors.ˆ6 denotestheestimateof 6 .
In practice,many trackingsystemshavetodealwith repetitivetasks,for example,robotsareoftenrequiredto executethesamemotion over andover again. Therefore,for theseapplications,it is assumedthat thedesiredtrajectorysignalxd $ t % is periodic.Namely,
xd $ t 7 T %# xd $ t %!( (4)
whereT is the period. An immediateconsequenceof equa-tion (4) is that the unknown function ϕ $ xd $ t %8% is alsoperiodic.For simplicity, denoteϕ $ xd $ t %8% , ϕmin $ xd $ t %% and ϕmax $ xd $ t %8%as ϕd $ t % , ϕmin $ t % and ϕmax $ t % , respectively. Then, we haveϕd $ t 7 T %# ϕd $ t % .
Let ϕd denotetheestimateof ϕd andϕd theestimationerror
(i.e., ϕd∆# ϕd 7 ϕd). UnderAssumption1, the ideaof discon-
tinuousprojectionbasedARC design[11] canbe borrowed tosolve the tracking control problemfor (1). Specifically, withthe initial estimatesatisfyingthe physicalconstraints(2), i.e.,ϕmin $ τ %- ϕd $ τ %9- ϕmax $ τ % , : τ )<;=7 T ( 0> , the following “learn-ing” algorithmis appliedto updatetheestimateϕd $ t %
ϕd $ t %# Projϕ $ ϕd $ t 7 T %?& Γz%5( (5)
whereΓ is the adaptationratewhich is a positive scalarin thiscase,z # x 7 xd representsthetrackingerror, andtheprojectionmappingProjϕ $8@ % is definedby
Projϕ $A6B%# CD E ϕmax $ t % if 6GF ϕmax $ t %ϕmin $ t % if 6GH ϕmin $ t %6 if ϕmin $ t %-I6G- ϕmax $ t % (6)
5252
Usingsimilarargumentsasin [12], [13], it canbeshown thattheabovetypeof learningalgorithmhasthefollowing properties
P1 ϕd ) Ωϕ #J+ ϕ : ϕmin $ t %- ϕd $ t %- ϕmax $ t %0/P2 ϕd $ t %3K Γ L 1 M Projϕ N ϕd $ t 7 T %& ΓzOP7 ϕd $ t 7 T %RQP7 zST- 0
(7)
whereϕd $ t % ∆# ϕd 7 ϕd.Thestructureof (1) motivatesusto designtheadaptiverobust
repetitivecontrollaw asfollows:
u # ua & us ( ua #U7 ϕd $ t %?& xd ( (8)
whereua is anadjustablemodelcompensationneedfor achiev-ing perfecttracking,andus is arobustcontrollaw to bespecifiedlater. Substituting(8) into (1), andthensimplifying theresultingexpression,oneobtains
z #V7 ϕd $ t %'& ϕ $ x%'& us & d $ x ( t %#V7 ϕd $ t %'& ∆ϕ & us & d $ x ( t %5( (9)
where∆ϕ # ϕ $ x%7 ϕd $ t % . Frommean-valuetheorem,it is as-sumedthatthefollowing inequalityis satisfied:2∆ϕ 2W#X2ϕ $ x%Y7 ϕ $ xd %Z2P- δϕ $ x ( t %32 z2[( (10)
whereδϕ is aknownfunction.Therobustcontrollaw us consistsof two termsgivenby:
us # us1 & us2 ( us1 #U7 ks1z( (11)
whereus1 is usedto stabilizethenominalsystemwith ks1 beingany nonlineargainsatisfying
ks1 \ k & δϕ $ x ( t %5( (12)
in which k is a positive constant.us2 is a robust feedbackusedto attenuatetheeffect of modeluncertainties,which is requiredto satisfythefollowing two constraints
i z;=7 ϕd $ t %?& d $ x ( t %?& us2>- εii zus2 - 0
(13)
whereε is a positive designparameterwhich can be arbitrar-ily small. Essentially, i of (13) shows thatus2 is synthesizedtodominatethe modeluncertaintiescomingfrom theapproxima-tion error ϕd andnon-periodicuncertainnonlinearitiesd $ x ( t % ,and ii of (13) is to make surethat us2 is dissipatingin natureso that it doesnot interferewith the functionalityof themodelcompensationpartua.
Theorem1: If the“learning” algorithmis chosenas(5), thentheadaptiverobustrepetitivecontrollaw (8) guaranteesthatA. In general,all signalsareboundedandthe trackingerror isboundedaboveby2 z2 2 - exp $87 2kt %32 z$ 0%32 2 & ε
k; 1 7 exp $]7 2kt %R>A( (14)
i.e., thetrackingerrorexponentiallydecaysto a ball. Theexpo-nentialconvergingrate2k andthesizeof thefinal trackingerror
( 2 z$ ∞ %Z2B-J^ εk) canbefreely adjustedby thecontrollerparame-
tersε andk in aknown form.
88

B. If after a finite time t0, the non-periodicuncertainnonlin-earitiesdisappear(i.e., d _ x ` t ab 0, c t d t0), then,in additiontoresultA, zerofinal trackingerroris alsoachieved,i.e,z egf 0 ast ef ∞. hProof: Substituting(11) into (9) gives
z i ks1z bUe ϕd _ t a?i ∆ϕ i d _ x ` t a?i us2 j (15)
Noting (10) and(12), the derivative of a positive semi-definite(p.s.d.)functionVs b 1
2z2 is givenby
Vs k e ks1z2 iml∆ϕ lnl zl]i zo=e ϕd _ t a?i d _ x ` t a?i us2pk e kz2 i zo=e ϕd _ t a?i d _ x ` t a?i us2pqj (16)
Thusfrom conditioni of (13)we have
Vs k e kz2 i ε bUe 2kVs i ε ` (17)
whichleadsto (14)andthusprovesresultA of Theorem1. Nowconsiderthesituationin B of Theorem1, i.e.,d _ x ` t agb 0, c t d t0.Choosea positivedefinite(p.d.) functionVa as
Va b Vs i 12
Γ r 1 s t
t r Tϕ2
d _ τ a dτ j (18)
From(16),conditionii of (13)andϕd _ t e T ab ϕd _ t a , it followsthat
Va k e kz2 e zϕd _ t a?i zus2 i 12Γ r 1 o ϕ2
d _ t aYe ϕ2d _ t e T a pk e kz2 e zϕd _ t a?i 1
2Γ r 1 o ϕd _ t aYe ϕd _ t e T a p o ϕd _ t ai ϕd _ t e T age 2ϕd _ t a pbte kz2 e zϕd _ t a?i 12Γ r 1 u ϕd _ t age ϕd _ t e T aqv u 2ϕd _ t ae ϕd _ t a?i ϕd _ t e T aqvk e kz2 e zϕd _ t a?i Γ r 1 o ϕd _ t age ϕd _ t e T a p ϕd _ t a j
(19)
Then,noting(5) and(7), Eqn.(19)becomes
Va k e kz2 e zϕd _ t a'i Γ r 1 u Projϕ _ ϕd _ t e T a'i Γzae ϕd _ t e T a v ϕd _ t abVe kz2 i ϕd _ t aWw Γ r 1 u Projϕ _ ϕd _ t e T a'i Γzae ϕd _ t e T a v e zxk e kz2 j(20)
Thisshowsthatz y z|~z ∞. It is easyto checkthatz y z ∞. So,z_ t a is uniformly continuous.By Barbalat’s lemma,z ef 0 ast ef ∞.
Remark1: One smoothexampleof us2 satisfying(13) canbe found in the following way. Let h be any smoothfunctionsatisfying
h dJlϕM l]i dmax_ x ` t a!` (21)
whereϕM b ϕmax e ϕmin. Then,us2 canbechosenas
us2 bte 14ε
h2zj (22)
Othersmoothor continuousexamplesof us2 canbeworkedoutin thesamewayasin [12], [14], [11].
5252
I I I . ADAPTIVE ROBUST REPETITIVE CONTROL OF
SYSTEMS IN A NORMAL FORM
In this section,the adaptive robust repetitive control designpresentedabove will be generalizedto classof SISO systemswhich canbetransformedto thefollowing controllablecanoni-cal form. Thesystemunderconsiderationis describedby
xi b xi 1 ` i k n e 1xn b ϕ _ xa?i d _ x ` t a?i uy b x1
(23)
wherex bo x1 `8` xn p T y IRn is the state,y is the output, andϕ _ xa andd _ x ` t a areassumedto satisfy (2) and(3) in the pre-vioussection,respectively. Let yd _ t a bea periodicdesiredmo-tion trajectory, which is assumedto be known, boundedwithboundedderivatives up to the n e 1 order. The control ob-jective is to designa boundedcontrol input u such that allsignalsare boundedand the output y tracks yd _ t a as closelyas possiblein spite of all the model uncertainties. As such,if perfect tracking were achieved, the desiredstatewould be
xd _ t a.bo yd _ t a!` yd _ t a!`888` y n r 1d p T y IRn, which is known in ad-
vance.Thus,we candefineϕd b ϕ _ xd _ t a8a andϕd b ϕd e ϕd asin section2. Definethestatetrackingerrorase b x e xd y IRn.Similarto (10),weassumethatthereexistsaknownvectorfunc-tion δϕ _ x ` t ay IRn suchthatl∆ϕ l3bXlϕ _ xaYe ϕ _ xd aZl k δT
ϕ _ x ` t a3l el j (24)
Sincethe system(23) hasmatchedmodeluncertaintiesonly, aswitching-surface-like trackingerrordefinedin [10] is adoptedin thepaper. Furthermore,a dynamiccompensatorcanbe em-ployedto enhancethedynamicresponseof thesystemasin thecontrolof robotmanipulators[12]. Thedesignproceedsasfol-lows.
Let a dynamiccompensatorbe
xc b Acxc i Bce1 ` xc y IRnc ` Bc y IRnc 1
yc b Ccxc ` yc y IR(25)
where _ Ac ` Bc ` Cc a is controllableandobservableande1 is thefirst elementof eor theactualoutputtrackingerror. For simplic-ity, denoteen r 1 asthefirst n e 1 elementsof e. Noting (23),wehave ˙en r 1 bo e2 `8` en p T , which is known. Definea switching-surface-like trackingerrormetricas
ξ b LTe i ycb LTn r 1en r 1 i en i ycb l1e1 i88i ln r 1e n r 2
1 i e n r 11 i yc ` (26)
whereL bXo LTn r 1 ` 1p T , Ln r 1 bXo l1 `88` ln r 1 p T is a constantvector
to be chosenlater. In frequency domain,from (25) and (26),e1 _ sa is relatedto ξ _ sa by
e1 _ sa"b Gξξ _ sa5` Gξ b 1sn r 1 i ln r 1sn r 2 iI888i l1 i Gc _ sa ` (27)
whereGc _ sab Cc _ sInc e Ac a r 1Bc. It is clearthatpolesof Gξ _ sacanbearbitrarily assignedby suitablychoosingdynamiccom-pensatortransferfunctionGc _ sa andtheconstantvectorL; Gξ _ sa
99

shouldbechosensuchthattheresultingdynamicswitchingsur-face ξ 0 (i.e., freeresponseof thetransferfunctionGξ s )possessesfastenoughexponentiallyconvergingrateandtheef-fect of non-zeroξ on e1 is attenuatedto a certaindegree.In ad-dition, the initial valuexc 0 of the dynamiccompensator(25)canbechosento satisfy
Ccxc 0U LTe 0! (28)
Then,ξ 0 0 andthetransienttrackingerrormaybereduce.Noting (25)and(26), thestatespacerepresentationof (27) is
obtainedasxξ Aξxξ Bξξ yξ Cξxξ (29)
wherexξ U xTc eT
n 1 T IRnc n 1 and
Aξ Ac Bc 00 0 In 2 Cc LT
n 1
Bξ 001
Cξ U 0 1 0 (30)
SinceGξ s is chosento bestable,thereexistsans.p.d.matrixPξ for any s.p.dmatrixQξ for thefollowing Lyapunov equation,
ATξ Pξ PξAξ U Qξ (31)
Furthermore,the exponentiallyconverging rateλmin Qξ λmax Pξ canbe
any desiredvalue by assigningthe polesof Aξ to the far leftplaneandsuitablychoosingQξ.
Definethe transformedstateerror vectorasxe xTξ ξ T xT
c eTn 1 ξ T IRnc n. Theoriginalstateerrorvectore is related
to xe by
e Cexe Ce V¡ 0 In 1 0 Cc LTn 1 1 ¢ (32)
Noting (24), thereexist known nonlinearfunctionsδx xe t andδξ xe t suchthat£
∆ϕ
£¥¤δx xe t 3¦ xξ ¦ δξ xe t £ ξ £ (33)
The proposedadaptive robust repetitive control law for (23)hasthesimilar formsas(8)
u ua ϕd t us xe t 5ua y n d t g ϕd t 5us us1 us2
us1 § kxe xe t xe § ks1ξ Cc Acxc Bce1 g LTn 1
˙en 1 BTξ Pξxξ (34)
Theassociatedlearningalgorithmis chosenasfollows
ϕd t Projϕ ϕd t T Γξ ! (35)
In (34),ks1 xe t is any nonlineargainsatisfying
ks1 ¨ k δξ 12kQ
δ2x (36)
wherekQ is any gain lessthanλmin Qξ , andus2 is requiredtosatisfyconstraintssimilar to (13)
i ξ = ϕd t d x t us2 ¤ εii ξus2
¤0
(37)
5353
Theorem2: If the the adaptive robust repetitive control law(34) is applied,with ϕd updatedby (35), thenA. In general,all signalsarebounded.Furthermore,the p.s.d.functionVs definedby
Vs 12
xTξ Pξxξ 1
2ξ2 (38)
is boundedaboveby
Vs
¤exp λVt Vs 0 ε
λV 1 exp λVt (39)
whereλV min λmin Qξ kQ
λmax Pξ 2k .B. If aftera finite time t0, thenon-periodicuncertaintiesdisap-pear(i.e.,d x t 0, © t ¨ t0), then,in additionto resultA, zerofinal trackingerroris alsoachieved,i.e,e gª 0 andxe ª 0 ast ª ∞. «Proof: From(23),(26)and(34), it canbecheckedout that
ξ LTn 1
˙en 1 ϕ x d x t u ynd Cc Acxc Bce1 t ks1ξ BT
ξ Pξxξ ϕd t ∆ϕ d x t us2 (40)
Noting (29), (31), (40) and(33), the derivative of Vs given by(38) is
Vs 12 xT
ξ Pξxξ 12xT
ξ PξxTξ ξξ 1
2 xTξ AT
ξ ξBTξ Pξxξ xT
ξ Pξ Aξxξ Bξξ ξξ 12xT
ξ ATξ Pξ PξAξ xξ 1
2 ξBTξ Pξxξ xT
ξ PξBξξ ξξ¤ 12xT
ξ Qξxξ ξBTξ Pξxξ ξ ¬ ks1ξ BT
ξ Pξxξ ϕd t ∆ϕ d x t us2¤ 12λmin Qξ 3¦ xξ ¦ 2 ks1ξ2 δx ¦ xξ ¦ £ ξ £ δξξ2 ξ ¬ ϕd t d x t us2¤ 12 λmin Qξ g kQ Z¦ xξ ¦ 2 kξ2 ε
(41)
in which δx ¦ xξ ¦ £ ξ £¥¤ 12kQ ¦ xξ ¦ 2 1
2kQδ2
xξ2 hasbeenused.Thusnotingconditioni of (37),wehave
Vs
¤ λVVs ε (42)
which leadsto (39) andprovesresultA of Theorem2. Notingconditionii of (37),B of Theorem2 canbeprovedusingaposi-tivedefinitefunctionVa of theform (18)andthesametechniqueasin (19)and(20).
IV. EXPERIMENT RESULTS
To illustratethe above designs,a two-axispositioningstageshown in Fig.1 is usedasacasestudy. Thetwo axesof theX-Ystagearemountedorthogonallyonahorizontalplanewith theY-axisontopof theX-axis. A particularfeatureof theset-upis thatthetwo linearmotorsareof differenttypes:theX-axis is drivenby anAnoradLCK-S-1 linearmotor (iron core)andtheY-axisis drivenby an AnoradLEM-S-3-Slinear motor (epoxycore).The positionof the stageis measuredby meansof two opticallinearencoderswith theresolutionof 1µm afterquadrature.
Experimentresultsareobtainedfor theY-axiswhosesimpli-fieddynamicsis givenby
x1 x2 Mx2 u Bx2 Ff n x2 d x t !
y x1 (43)
00

Fig. 1. X-Y stage
wherex ®m¯ x1 ° x2 ± T representsthepositionandvelocityof thein-ertiaload,M is theunknown inertiaof thepayloadplusthecoilassembly, B is theunknown dampingconstant,u is the controlvoltage,Ff n is theunknown nonlinearfriction force,andd ² x ° t ³representsthe lumpeddisturbanceconsistingof model uncer-taintiesandexternaldisturbances.
Thecontrollerdesignproposedin SectionIII canbegeneral-ized to solve the trackingcontrol problemof the linear motor.For simplicity, the dynamiccompensator(25) is ignored,i.e.,Cc ® 0. Thusthe switching-surface-like trackingerror is givenby
ξ ® e1 ´ l1e1 ® x2 µ x2eq° x2eq∆® yd µ l1e1 ° (44)
wheree1 ® y µ yd. Dif ferentiating(44) andsubstitutingtheex-pressiongivenby (43),oneobtains
Mξ ® u ´ ϕ ´ d ° (45)
whereϕ ∆® µ Mx2eq µ Bx2 µ Ff n ² x2 ³ . Adding and subtractinga repeatableterm ϕd ² t ³.® µ Myd µ Byd µ Ff n ² yd ³ on the right-handsideof (45)yields
Mξ ® u ´ ϕd ² t ³ ´ ∆ϕ ´ d ° (46)
where∆ϕ ® ϕ µ ϕd. As shown in [4], ∆ϕ canbequantifiedas¶∆ϕ¶¥·
γ1¶e1¶ ´ γ2e2
1 ´ γ3¶ξ¶ ´ γ4
¶ξ¶¬¶e1¶ ° (47)
whereγ1 ° γ2 ° γ3, andγ4 arepositive boundingconstantsthatde-pendon thedesiredtrajectoryandthephysicalpropertiesof thelinearmotor. Similar to [15], theadaptiverobustrepetitivecon-trol law is givenby:
u ® ua ´ us1 ´ us2 °ua ® µ ϕd ² t ³ ° us1 ® µ kξ µ kee1 µ kae2
1ξ ° us2 ® µ 14εh2ξ ° (48)
whereh is definedin Remark1, andthecontrollerparametersk,ke andka arepositivescalarssatisfyingthefollowingconditions:
ka ¸ γ2 ´ γ4 ° kel1 ¸ 12
γ1 ´ 14
γ2 ° k ¸ 12
γ1 ´ γ3 ´ 14
γ4 ¹ (49)
Theassociatedlearningalgorithmis givenin (35).
5353
The designparametersof the adaptive robust repetitive con-troller arechosenas:
l1 ® 200° k ® 20° ke ® 20° ka ® 20° ε ® 1 ° Γ ® 50°ϕmax ® 2 ° ϕmin ® µ 2 ° dmax ® 1 ° ϕd ² 0³® 0 ¹ (50)
For comparisonpurpose,a discrete-timerepetitive controller[3], [16], [17] which was proposedto solve a set-pointregu-lationproblemis alsoimplemented:
Gr ² qº 1 ³® qº N ² 1 µ 1 ¹ 96qº 1 ´ 0 ¹ 9608qº 2³ Q ² qº 1 ³² 0 ¹ 0151qº 1 µ 0 ¹ 01431qº 2³!² 1 µ Q ² q º 1 ³ q º N ³ °(51)
whereq is theonestepdelayshift operator, N ® 100,andtheQfilter is chosenasQ ² qº 1 ³®»² q ´ 2 ´ qº 1 ³¼ 4. Both controllersareimplementedusinga dSPACE DS1103controllerboardandthesamplingrateis fs ® 10KHz.
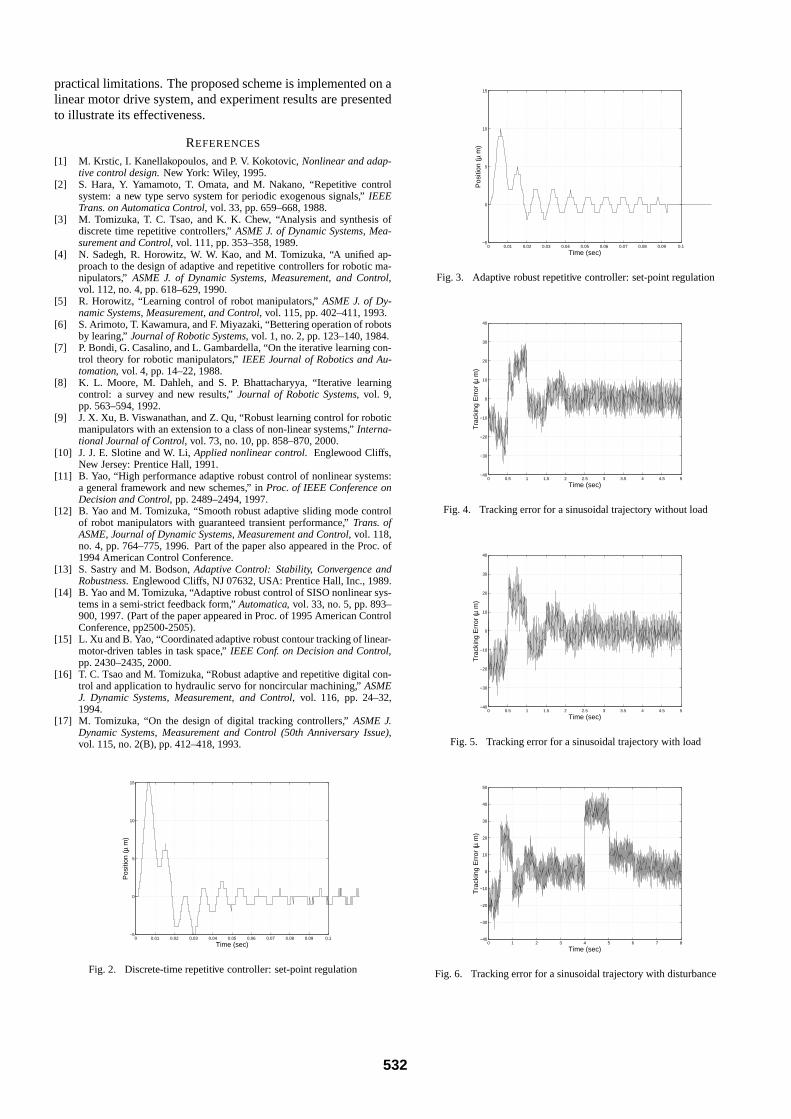
First we considera set-pointregulation problem when thelinear motor is disturbedby a sinusoidaldisturbanced ² t ³½®0 ¹ 2sin² 200πt ³!² V ³ . Theperformanceof thediscrete-timerepet-itive controller and the adaptive robust repetitive controller isshown in Fig. 2 andFig. 3, respectively. It canbeseenthatbothcontrollerscaneliminatetheeffectof thedisturbanceafter5 ¾ 6periods.However, theproposedcontrollerhasa bettertransientperformance.
The motor is then controller by the adaptive robust repet-itive controller to track a desired trajectory yd ® 0 ¹ 05 1 µcos² 2πt ³ ± ² m³ . The tracking error is shown in Fig. 4. It canbe seenthat the transienttrackingerror is relative large. How-ever, it becomessmallerand smallerafter several runs. Thisresultshows thatthecontrolalgorithmensurestheconvergenceof theoutputtrackingerror. To testtheperformancerobustnessof thealgorithmsto parametervariations,themotor is run witha 9.1kg payloadmountedon it. The trackingerror is given inFig. 5. It shows that controllerachievesgoodtrackingperfor-mancein spite of the changeof inertia load. Finally, to testthe performancerobustnessof the controller to disturbance,astepdisturbance(a simulated0.5V electricalsignal)is addedatt=4s. Thetrackingerror is very largewhenthedisturbanceoc-curs(Fig. 6). But thelearningalgorithmcapturesits effectafterseveral runsandcompensatesit quickly. This result illustratestheperformancerobustnessof proposedscheme.
V. CONCLUSION
In this paper, a performanceorientedadaptive robust repeti-tive control law hasbeenconstructedfor a classof n-th orderuncertainnonlinearsystemsin a normalform. Like otherexist-ing repetitive control schemes,the proposedapproachexploitsthe propertyof repetitive tasks. As a result, in the absenceofnon-periodicexogenousdisturbances,theeffectof unknowndy-namicmodelis eliminated.In addition,by utilizing certainpriorinformation aboutthe systemsuchas the boundsof the peri-odic uncertainties,theproposedschemeusesa projectionmap-ping for a stablelearningprocess– a robust performancethattheexistingrepetitivecontrollerscannotachieve. Certainrobustfeedbackis constructedto attenuatethe effect of both modelapproximationerrorsandnon-periodicuncertainnonlinearitiesfor a guaranteedrobust performancein general. By doing so,the presenteddesignenjoys the benefitsof both repetitive con-trol andfast robust feedbackwhile naturallyovercomingtheir
11
practicallimitations.Theproposedschemeis implementedonalinearmotordrive system,andexperimentresultsarepresentedto illustrateits effectiveness.
REFERENCES
[1] M. Krstic, I. Kanellakopoulos,andP. V. Kokotovic, Nonlinearandadap-tive control design. New York: Wiley, 1995.
[2] S. Hara, Y. Yamamoto,T. Omata,and M. Nakano,“Repetitive controlsystem:a new type servo systemfor periodicexogenoussignals,” IEEETrans.onAutomaticaControl, vol. 33,pp.659–668,1988.
[3] M. Tomizuka,T. C. Tsao,andK. K. Chew, “Analysis andsynthesisofdiscretetime repetitive controllers,” ASMEJ. of DynamicSystems,Mea-surementandControl, vol. 111,pp.353–358,1989.
[4] N. Sadegh, R. Horowitz, W. W. Kao, andM. Tomizuka,“A unified ap-proachto thedesignof adaptive andrepetitive controllersfor roboticma-nipulators,” ASMEJ. of DynamicSystems,Measurement,and Control,vol. 112,no.4, pp.618–629,1990.
[5] R. Horowitz, “Learning control of robot manipulators,” ASMEJ. of Dy-namicSystems,Measurement,andControl, vol. 115,pp.402–411,1993.
[6] S.Arimoto, T. Kawamura,andF. Miyazaki,“Betteringoperationof robotsby learing,” Journal of RoboticSystems, vol. 1, no.2, pp.123–140,1984.
[7] P. Bondi,G. Casalino,andL. Gambardella,“On theiterative learningcon-trol theory for robotic manipulators,” IEEE Journal of Roboticsand Au-tomation, vol. 4, pp.14–22,1988.
[8] K. L. Moore, M. Dahleh, and S. P. Bhattacharyya,“Iterative learningcontrol: a survey and new results,” Journal of RoboticSystems, vol. 9,pp.563–594,1992.
[9] J.X. Xu, B. Viswanathan,andZ. Qu,“Robust learningcontrolfor roboticmanipulatorswith anextensionto a classof non-linearsystems,” Interna-tional Journal of Control, vol. 73,no.10,pp.858–870,2000.
[10] J. J. E. SlotineandW. Li, Appliednonlinearcontrol. Englewood Cliffs,New Jersey: PrenticeHall, 1991.
[11] B. Yao,“High performanceadaptive robustcontrolof nonlinearsystems:a generalframework andnew schemes,” in Proc. of IEEE ConferenceonDecisionandControl, pp.2489–2494,1997.
[12] B. YaoandM. Tomizuka,“Smoothrobust adaptive sliding modecontrolof robot manipulatorswith guaranteedtransientperformance,” Trans.ofASME,Journal of DynamicSystems,MeasurementandControl, vol. 118,no. 4, pp. 764–775,1996. Part of thepaperalsoappearedin theProc.of1994AmericanControlConference.
[13] S. SastryandM. Bodson,AdaptiveControl: Stability, ConvergenceandRobustness. EnglewoodCliffs, NJ07632,USA: PrenticeHall, Inc., 1989.
[14] B. YaoandM. Tomizuka,“Adaptive robustcontrolof SISOnonlinearsys-temsin a semi-strictfeedbackform,” Automatica, vol. 33,no.5, pp.893–900,1997.(Partof thepaperappearedin Proc.of 1995AmericanControlConference,pp2500-2505).
[15] L. Xu andB. Yao,“Coordinatedadaptive robustcontourtrackingof linear-motor-driven tablesin taskspace,” IEEE Conf. on DecisionandControl,pp.2430–2435,2000.
[16] T. C. TsaoandM. Tomizuka,“Robustadaptive andrepetitive digital con-trol andapplicationto hydraulicservo for noncircularmachining,” ASMEJ. Dynamic Systems,Measurement,and Control, vol. 116, pp. 24–32,1994.
[17] M. Tomizuka,“On the designof digital tracking controllers,” ASMEJ.DynamicSystems,Measurementand Control (50th Anniversary Issue),vol. 115,no.2(B), pp.412–418,1993.
0 0.01 0.02 0.03 0.04 0.05 0.06 0.07 0.08 0.09 0.1−5
0
5
10
15
Pos
ition
(µ m
)
Time (sec)
Fig. 2. Discrete-timerepetitive controller:set-pointregulation
532532
0 0.01 0.02 0.03 0.04 0.05 0.06 0.07 0.08 0.09 0.1−5
0
5
10
15
Pos
ition
(µ m
)
Time (sec)
Fig. 3. Adaptive robustrepetitive controller:set-pointregulation
0 0.5 1 1.5 2 2.5 3 3.5 4 4.5 5−40
−30
−20
−10
0
10
20
30
40
Tra
ckin
g E
rror
(µ m
)
Time (sec)
Fig. 4. Trackingerrorfor asinusoidaltrajectorywithout load
0 0.5 1 1.5 2 2.5 3 3.5 4 4.5 5−40
−30
−20
−10
0
10
20
30
40
Tra
ckin
g E
rror
(µ m
)
Time (sec)
Fig. 5. Trackingerrorfor asinusoidaltrajectorywith load
0 1 2 3 4 5 6 7 8−40
−30
−20
−10
0
10
20
30
40
50
Tra
ckin
g E
rror
(µ m
)
Time (sec)
Fig. 6. Trackingerrorfor asinusoidaltrajectorywith disturbance






![ROBUST ADAPTIVE BEAMFORMER WITH · PDF filebust adaptive beamforming, ... strained adaptive beamformer is studied in [5, 6] and widely used thereafter. Recently some interesting robust](https://static.fdocuments.net/doc/165x107/5ab383fc7f8b9ad9788e2684/robust-adaptive-beamformer-with-adaptive-beamforming-strained-adaptive.jpg)











