Adaptive Locomotion for a Multilegged Robot Over Rough Terrain

of 7
description
Robotics
Transcript of Adaptive Locomotion for a Multilegged Robot Over Rough Terrain
-
IEEE TRANSACTIONS ON SYSTEMS, MAN, AND CYBERNETICS, VOL. SMC-9, NO. 4, APRIL 1979
Adaptive Locomotion of a Multilegged Robotover Rough Terrain
ROBERT B. McGHEE, MEMBER, IEEE, AND GEOFFREY I. ISWANDHI
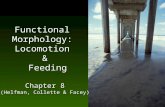
Abstract-Although the off-road mobility characteristics ofwheeled or tracked vehicles are generally recognized as being inferiorto those of man and cursorial animals, the complexity of thejoint-coordination control problem has thus far frustrated attemptsto achieve improved vehicular terrain adaptability through theapplication of legged locomotion concepts. Nevertheless, the evidentsuperiority of biological systems in this regard has motivated anumber of theoretical studies over the past decade which have nowreached a state of maturity sufficient to permit the construction ofexperimental computer-controlled adaptive walking machines. Atleast two such vehicles are known to have recently demonstratedlegged locomotion over smooth hard-surfaced terrain. This paper isconcerned with an extension of the present theory of limb coordi-nation for such machines to the case in which the terrain includesregions not suitable for weight-bearing and which must consequentlybe avoided by the control computer in deciding when and where tosuccessively place the feet of the vehicle. The paper includes acomplete problem formalization, a heuristic algorithm for solution of Fig. 1. Front view ofOSU hexapod vehicle showing control computer ithe problem thus posed, and a preliminary evaluation ofthe proposed background. Vehicle length = 1.3 m, width = 1.4 m, total weight exclualgorithm in terms of a computer simulation study. sive of cables = 103 kg,
INTRODUCTIONU P TOTHE present time, nearly all vehicles for off-roadUlocomotion have made use of systems of wheels ortracks for support and propulsion. This is in strikingcontrast to the locomotion ofman and cursorial animals inwhich articulated systems of levers, individually poweredand flexibly coordinated, are used to achieve this function.Vehicle designers have been aware for some time that theprinciples involved in natural "legged" locomotion systemsresult in superior mobility characteristics due to theirinherently greater adaptability to terrain irregularities andto the fundamentally different nature of the interaction ofsuch systems with the supporting terrain in comparison towheeled or tracked vehicles [1]. Unfortunately, until re-cently, the complexity of the joint coordination controlproblem has frustrated attempts to apply these principles toobtain vehicles with off-road mobility characteristics com-parable to those of living systems. While a theory for suchadaptive walking machines has gradually evolved over thepast decade [2], the attainment of the necessary jointcoordination function by an on-board computer was notfeasible prior to the introduction of microprocessors [3]. In
Manuscript received March 29, 1978; revised November 20, 1978. Thiswork was supported by the National Science Foundation under GrantENG74-21664.
R. B. McGhee is with the Department of Electrical Engineering, OhioState University, Columbus, OH 43210.G. I. Iswandhi was with the Department of Electrical Engineering, Ohio
State University, Columbus, OH. He is now with the Mead PaperCompany, Chillicothe, OH 45601.
response to the emergence of such devices, at least twoexperimental hexapod vehicles have been constructed forthe purpose of supporting research on sensors and oncomputer hardware and software organization for automa-tic limb motion coordination [4]-[7]. Fig. 1 illustrates one ofthese machines.
Detailed consideration of the problem ofautomatic jointmotion coordination reveals a natural hierarchical structurein which the highest levels are concerned with goal attain-ment, the intermediate levels involve motion planning, andthe lower levels involve motion execution [2], [3], [8]. Thispaper is concerned with one ofthemore critical intermediatelevel problems, namely, the determination of an optimalschedule for the lifting and placing of the legs of a vehiclerelative to the supporting terrain. In what follows, a sum-mary ofpreviously available results concerning this problemis presented together with a new problem formalization anda heuristic solution which has shown promising behavior insimulation studies.
PROBLEM STATEMENT AND SUMMARY OFPREVIOUS WORK
A considerable amount of prior work has been devoted tothe leg sequencing problem for the special case of straight-line constant-speed locomotion over level terrain [9]-[12].Central to this work has been the notion ofa finite character-ization of leg states in which each leg ofa machine or animalis idealized to a two-state device, namely, either the state ofbeing on the ground (1-state) or in the air (0-state) [13], [14].This concept leads to the following definitions.
0018-9472/79/0400-0176$00.75 (C 1979 IEEE
n
176
-
MCGHEE AND ISWANDHI: ADAPTIVE LOCOMOTION OF MULTILEGGED ROBOT
Definition 1: The support state of a K-legged locomotionsystem is a binary row vector y(t), such that at any time t,yi(t) = 1 if leg i is in contact with the supporting surface andy(t) = 0 otherwise.
In general, then, the problem to be addressed in this paperis the determination of a sequence of support states for agiven locomotion system over a particular terrain which isoptimal with respect to some specified criterion. A periodicsolution to this problem is usually referred to as a gait [11],[12], [14]-[16].'
In all but one prior study [17], the criterion used forsupport state sequence optimization has been one whichrelates to the degree of static stability of the system underconsideration. A precise specification ofthis criterion, calledthe longitudinal stability margin, is provided by the followingthree definitions.
Definition 2: The support pattern associated with a givensupport state is the convex hull (minimum area convexpolygon) of the point set in a horizontal plane whichcontains the vertical projections of the feet of all supportinglegs [16].
Evidently, support patterns involve geometrical as well astemporal aspects of locomotion. For periodic gaits andstraight-line locomotion, both of these attributes can beincorporated in a vector of initial foot positions and legphasing relationships called a "kinematic gait formula"[15], [16]. Given this or any other complete parametricdescription of the kinematics ofgait, the following definitionformalizes the intuitive concept of static stability.
Definition 3: Consider any support state sequence withkinematics specified by a suitable parameter vector p(t). Letq(t) be the location of the vertical projection of the vehiclecenter of gravity onto any horizontal plane. Then thesupport pattern determined by p(t) is statically stable at timet if and only if q(t) is contained in its interior.
Finally, based upon the above concepts, two measures ofthe degree of static stability associated with a given supportstate sequence are provided by the following.
Definition 4: For a particular support state sequence andassociated kinematic parameter vector p(t), suppose that attime t the corresponding support pattern is statically stable.Then the support state longitudinal stability margin s(t) isdefined as the shortest distance from q(t) to the front or rearboundary of the support pattern as measured in the direc-tion of travel. If the support state sequence is periodic, thenc(K), the gait longitudinal stability margin [16], is defined as
u(K) = min s(t)0
-
IEEE TRANSACTIONS ON SYSTEMS, MAN, AND CYBERNETICS, VOI SMC-9, No. 4. APRI1 1979
THE FREE GAIT PROBLEMA formal statement of the free gait problem in a computa-
tionally tractable form requires a number of furtherdefinitions as follows.
Definition 5: The terrain to be traversed is divided insquare cells. Each cell is either permitted (denoted with 0) orforbidden (denoted with 1).
Definition 6: The motion trace [17] of a vehicle consists ofthe desired trajectory for the vehicle center of gravity. It iscomposed of successive circular arcs specified by either ahuman operator or by some type of automatic system. Thevehicle longitudinal axis is assumed to be tangent to themotion trace at the vehicle center of gravity.
Since the motion trace is assumed to be specified inadvance, the terrain around it should not contain obstaclesso large that they cannot be walked over by the vehicle.3 Ifsuch obstacles should be found along the motion trace, uponencountering them, the vehicle must stop. It is then thehuman operator or control computer's responsibility todefine a new motion trace. While future research mayproduce algorithms for climbing over large three-dimensional obstacles, this case is not treated in this paper.The two computer-controlled legged vehicles known to
the authors both employ a main drive axis (azimuth axis) foreach leg which is parallel to the vertical axis of the vehicle.This arrangement, which can be seen in Fig. 1, motivates thenext two definitions.
Definition 7: Each vehicle leg has a reachable area in theeform of a sector of an annulus. This area is specified by fourparameters: minimum angle fmin, maximum angle l max'minimum radius rmin, and maximum radius rmax. Reachableareas move as the body moves.
Definition 8: A cell is reachable by a leg at a given time ifthe center of that cell is covered by the current reachablearea of that leg. Feet are always placed in the center ofreachable cells.Overlapping reachable areas raise interference problems.
That is, a given leg may exclude regions ofthe reachable areaof legs adjacent to it. Calculation ofthe excluded areas is noteasy and is dependent on where the legs are at a given time.One way of dealing with this problem is to avoid italtogether by eliminating a priori all overlapping reachableareas so that each leg has a distinct region that can beaccessed only by it and not by any other leg. This will bedone in the present work, although it is recognized that inthe future the leg interference problem should be dealt within a more general way to insure that the full capability of agiven vehicle can be utilized during free gait generation.To provide a concrete example ofsome ofthe above ideas,
the geometry of the machine shown in Fig. 1 will be assumed.
While the global problem of choosing a good motion trace (usuallyreferred to as the "navigation" problem) is of itself of considerable interest,this paper is concerned only with the local problem of foot placement(which arises only in connection with legged locomotion) and assumesthat the navigation problem is solved either by human intelligence or bysome higher level automatic system. The interested reader is referred to[8], [21], and [22] for some approaches to the difficult problem of robotnavigation.
Direction of Motion
Excluded Areafor Leg 3
ReachableAreafor Leg 3
-
Excluded Areafor l eg 3
,-Reochoble Areo of Leg 2
-- Front Boundary Line
Excluded Areo for Leg 2
Rear Boundary Line
XV" Reachable Area forLeg 6
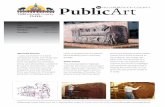
Fig. 3. Schematic top view of vehicle showing leg numbering and boun-dary lines for foot placing. Legs 1, 4, and 5 are shown in their restconfiguration, while reachable and excluded areas are shown for legs 2,3, and 6.
To solve the interference problem, two boundary linesperpendicular to the longitudinal axis of the vehicle can bespecified. For the purposes of this paper, the front boundaryline has been arbitrarily placed one-quarter of the bodylength in front of the vehicle center of gravity. The rearboundary line is similarly placed one-quarter body lengthbehind the vehicle center. The front legs are constrained tobe in front of the front boundary line, while the middle legscan only be between the two boundary lines, and the rearlegs must be behind the rear boundary line. This arrange-ment is illustrated in Fig. 3. These constraints eliminate theinterference problem entirely and motivate the followingtwo definitions.
Definition 9: The excluded area for the front legs is thatpart of their reachable areas behind the front boundary line.The excluded area for the middle legs is the portion of theirreachable areas in front of the front boundary line andbehind the rear boundary line. The excluded area for the rearlegs is the reachable area in front of the rear boundary line.
Excluded areas for the example system considered in thispaper are also shown in Fig. 3.
Definition 10: A terrain cell i is afoothold [17] Fijfor legj ifand only if:
a) cell i is a permitted cell,b) the center of cell i lies in a reachable area of leg.j, andc) the center of cell i is not in the excluded area of leg j.For the present example, the form of the excluded areas is
such that at any given time each cell can be a foothold of atmost one leg. Moreover, each leg has a set of footholds ofwhich not more than one can be in use at any given time. Thissituation suggests the next definition.
Definition 11: A foothold F1j becomes a support point Sifor leg j whenever the foot of leg j is placed in its center.The set of footholds for leg j is thus seen to be the set of all
potential support points for that leg.At this point, it is necessary to introduce some measure of
the relative desirability of footholds to permit realization ofan algorithm for selection of support points associated withsuccessive support state sequences. The next two definitionsprovide one such measure.
178
-
MCGHEE AND ISWANDHI: ADAPTIVE LOCOMOTION OF MULTILEGGED ROBOT
Definition 12: The existence segment of a foothold is thelargest segment of the motion trace such that when theprojection of the vehicle center of gravity is on this segment,cell i is a foothold Fij for leg j [17].
Informally, the existence segment of a foothold is thatportion of the motion trace over which permitted cell i is apotential support point for leg j.
In determining the existence segment, two cases must bedistinguished, namely, the preview case in which the motiontrace is known for some time into future and the nonpreviewcase in which the motion trace is given only up to presenttime. In the latter circumstance, computation of the exist-ence segment can be accomplished by assuming that thecurrent vehicle turning radius will be maintained for anindefinite time into the future. In either case, a quantitativeindication of the usefulness of a particular foothold is givenby the following definition.
Definition 13: The kinematic margin for foothold Fii is thearc length along the motion trace from the current verticalprojection of the center of gravity of the vehicle to theforward end of the existence segment for Fii.The kinematic margin of a foothold evidently relates to
how long a foot can be on a given cell before the leg reachesits kinematic limit. Clearly this notion also applies to eachsupport point Sj, since every support point is also a foothold.For a particular circular arc of the motion trace, relative tothe vehicle, the terrain moves in a circular arc concentricwith the motion trace segment. A foothold Fij will thus tracea circular arc in the opposite direction to the vehicle. Thisobservation proves to be useful in calculating both theexistence segment and the kinematic margin for a givenfoothold.
It is possible that even though the kinematic margins of allsupport points are greater than zero, a vehicle may never-theless be forced to change its support state in order tomaintain static stability. This observation leads to thefollowing definitions.
Definition 14: The stability segment of a given supportpattern is the largest segment of the motion trace such thatwhen the projection of the vehicle center of gravity is on thistrace, the vehicle is statically stable.Combining several of the above ideas permits the follow-
ing definition of a concept central to the solution of the freegait problem.
Definition 15: The existence segment ofa support pattern isa maximal segment of the motion trace such that [17]:
a) the kinematic margins of all support points are greaterthan zero, and
b) the locomotion system is statically stable.Evidently, movement of a legged locomotive system along aprescribed motion trace in a statically stable manner ispossible if and only if there exists a sequence of supportpatterns and corresponding support states such that theexistence segments ofsuccessive support patterns overlap [17].The next section of this paper describes a heuristic algorithmfor finding such sequences when they exist.
AN ALGORITHM FOR FREE GAIT GENERATIONAs stated above, the problem offree gait generation can be
viewed as one of finding a sequence of support points suchthat there is an overlap of the existence segmnent of eachsupport state with that of the support state which proceededit. Evidently, in general, such sequences are not unique. Thusdetermination of a specific sequence requires either imposi-tion of additional constraints or introduction of some typeof global optimization criterion. These considerations moti-vate the following two definitions.
Definition 16: A support state sequence is feasible formotion along a specified motion trace over a given terrain ifand only if there exists an associated sequence of supportpoints such that the existence segments ofsuccessive supportpatterns overlap.
Definition 17: An optimal support point sequence formotion along a specified motion trace over a given terrain isone such that:
a) the corresponding support state sequence is feasible,and
b) some specified criterion function is maximized(minimized).
The optimal support state sequence is the sequence deter-mined by the optimal support point sequence.
It is easy to imagine many different criteria for optimizingsupport point sequences. For example, the minimal stabilitymargin over the whole motion trace could be maximized.Minimizing the maximum load placed on any leg might beimportant in traversing soft soils. If energy can be related tokinematics, then minimizing the total energy to traverse theentire motion trace might be important. The choice of aspecific criterion clearly depends upon the characteristics ofa given vehicle and the nature of its mission. Very likely, inany realistic situation, some combination of all of thesefactors and still other criteria would represent a moresuitable basis for optimization.
In many circumstances, the combinatorial complexity ofthe problem ofdetermining optimal support state sequencesmay be so great as to prohibit its computational solution inan acceptable period of time. While discrete dynamic pro-gramming [23] could perhaps be used to find the optimalsequence if the total number ofterrain cells is not too great, adifferent approach is taken here. Specifically, as in [17], asuboptimal sequence will be sought by making use of analgorithm which determines the support pattern sequenceonly one stage forward rather than over the whole trajec-tory. While such an approach might be expected to giverather poor results, preliminary computer simulation stu-dies have shown that this is not the case, providing that themotion trace has been appropriately selected. That is, if themotion trace is chosen so that a large number of feasiblesupport state sequences exist, then the algorithm to bepresented is typically capable of finding one such sequence.The departure of such sequences from optimality is yet to bedetermined.
Fig. 4 is a flowchart for the free gait algorithm utilized inthis research. This algorithm is similar to that described in
179
-
IEEE TRANSACTIONS ON SYSTEMS, MAN, AND CYBERNETICS, VOL. SMC-9, NO. 4a APR11 1979
Fig. 4. Flowchart for free gait algorithm.
[17], although details differ. To understand its operation, it isuseful to recognize that, at each iteration, one of fourdecisions can be made:
1) Maintain the current support state.2) Lift a leg.3) Place a leg.4) Halt.
Careful examination of each of the corresponding paths inFig. 4 shows that this algorithm tends to maximize thenumber of legs in the air and thus sacrifices stability foradaptability. It can also be seen that a halt state can occurprematurely. In such a circumstance, the algorithm is said tobe deadlocked. In practical terms, the only solution for adeadlocked condition (cul-de-sac) is for the operator ornavigation system to back up the vehicle for a suitabledistance and then either alter the algorithm or specify a newmotion trace.
Clearly, a simple change in the tests for static stabilitywould allow modification of the algorithm of Fig. 4 toenforce a minimum value for stability margin. This wouldtend to increase the average number of legs in a supportingstate and would certainly increase the probability of adeadlock. It is also evident that more complex changes in
algorithm logic are possible such as, for example, placinglegs whenever possible and lifting legs only when deadlock isimminent. These alternatives have not been explored as yet,but remain a subject for future research.The underlying logic for the algorithm of Fig. 4 can be
summarized as follows. Providing that the vehicle remainsstable, legs are lifted so as to maximize the minimum value ofthe kinematic margin over all supporting legs. This in turntends to extend forward the existence segment of eachsupport state to a maximal extent, thereby increasing thelikelihood that a new support state with an overlappingexistence segment can be found. If the vehicle stabilitv isimperiled, then the algorithm corrects this situation byplacing a leg when this is possible. Whenever a leg is placed,among those legs which make the vehicle stable, the one withthe largest kinematic margin is utilized. If leg placing is forthe purpose of allowing a leg to be lifted in the next cycle ofthe algorithm, this is not done unless a net increase in theminimal value of the kinematic margin over all supportinglegs results. This later feature appears to be missinlg from theKugushev and Jaroshevskij algorithm [17]. Likewise, it isnot apparent that in [17] the placing of legs to restore vehiclestability is governed by maximization of the minimumkinematic margin. Both of these features are believed to be
180
-
MCGHEE AND ISWANDHI: ADAPTIVE LOCOMOTION OF MULTILEGGED ROBOT
. . . . . . . . . . .... . . . . .
.
*...0...... .. 0... 0...
.0 0 .. p0........... 1..n..... _na) t = 0.0 sec. b) t = 1. 5 sec.
.0 . 0.* . . . . . ..O.:... . . . .
~~~~~~~~~~.0 . .0 . . ..0
c) t = 3.0 sec. d) t = 4.5 sec.
. ..
. . . .
.
El.0 0 .. ..000
t.. = 6.0 sec. f) t = 7.5 sec.Fg5.Photographs of six representative phases of vehicle support aspresented on display panel during simulated locomotion over terrainwith forbidden cells.
quite important to the success of the free gait algorithm infinding feasible support state sequences over terrain contain-ing a large proportion of forbidden cells.As a final remark, it should be noted that leg placing
requires an exhaustive search over every foothold of everyleg not in a supporting state. This requirement places a lowerbound on the size of terrain cells for real-time application offree gait algorithms.
SIMULATION RESULTSA simulation program including both a representation of
the vehicle and terrain and the free gait algorithm of Fig. 4has been written as part of this research. This program isimplemented on a DEC-10 computer operating in a time-shaird mode and utilizing an AG-60 plasma panel display asan output device. The display is equipped with a touch-panelsensor which allows the user to designate terrain cells asforbidden by simply touching them. A cell can be restored tothe status of a permitted cell by simply touching it onceagain during the terrain specification portion of programexecution. Permitted cells are displayeda al dot designatingthe cell center. while forbidden cells are outlined without theinclusion of such a dot. Fig. 5(a) is a photograph of a typicalsimulated terrain created by this process. This figure alsoshows a simplified depiction of the vehicle as seen from thetop. The dimensions used to represent this vehicle and its
reachable areas correspond to those of the hexapod systemillustrated in Fig. 1. The convention used in the display isthat only supporting legs are shown, since the position oflegs in the air has no bearing on vehicle stability orkinematic limits.
After the terrain and vehicle turning radius have beenspecified by the operator, iterative execution of the free gaitalgorithm begins. Fig. 5(a)-(f) shows six representativephases of such a simulation experiment as presented on theplasma panel display. It can be seen, as expected, that thealgorithm under consideration attempts to keep a maximalnumber of legs in the air with the minimum of threesupporting legs occurring in Fig. 5(e). Many different terrainconditions have been investigated in this research, andthe results presented in Fig. 5 are typical. In particular,support sequences are always nonperiodic and, in fact, arequite unpredictable when the terrain includes more than avery small percentage of forbidden cells. It is noteworthythat no terrain examples have been found as yet in which thesystem becomes deadlocked, unless the vehicle is required totraverse a region in which there is a set of contiguous forbid-den cells constituting an area comparable in size to thevehicle body. Whenever such regions are avoided by properpath selection, the algorithm presented seems to be veryeffective, even when only substantially less than half of theterrain is composed of permitted cells. Similar results arereported in [17].The program to realize the algorithm of Fig. 4 was written
in Fortran and required about 250 statements. Executionwas somewhat faster than real time for a vehicle speed ofabout 0.5 ft/s. Since the computer was used in a time-sharedmode and execution also required display updating, it isbelieved that a small minicomputer (or possibly even amicroprocessor) could solve the support state sequenceproblem on-line for a vehicle similar to the one illustrated inFig. 1.
SUMMARY AND CONCLUSIONSThis paper has presented a formalization of the problem
of choosing a sequence of support points for a legged vehicleto enable it to negotiate terrain in which some regions areunsuitable for support. The formal problem can be viewed asa rather complicated game somewhat akin to solving amaze, but with more complex constraints governing succes-sive moves. The game is "won" if a sequence of supportpoints is found which permits the vehicle to move from itsstarting point to its goal along a specified trajectory withoutstepping on forbidden cells and without becoming unstable.It is clear that biological systems are able to solve thisproblem with great efficiency as is evidenced, for example, bythe behavior of cursorial quadrupeds in rapid motion oververy irregular terrain.
Experience with other simulation studies and with actualvehicles has shown that, while human beings are naturallysuited to solve the support sequence problem for bipedlocomotion, this capability is not readily extended to addi-tional pairs of legs [2], [24], [25]. It appears that, instead, thistask must be relegated to an automatic system if acceptableperformance is to be attained in a legged vehicle when
181
-
IEEE TRANSACTIONS ON SYSTEMS, MAN, AND CYBERNETICS, VOL. SMC-9, NO. 4, APRIL 1979
traversing very difficult terrain. One algorithm capable ofsolving this problem has been presented in this papertogether with some typical results. The authors do notsuggest that this algorithm is in any sense optimal, althoughit is believed that some improvements have been made overthe only previous algorithm proposed for this problem [17].Rather, the importance of this work lies in the completeformalization of the problem and the demonstration thatautomatic solution in real time is feasible with a modest-sized computer.
It is hoped that the presentation of these results willinterest others sufficiently to stimulate further research,which surely should yield both better algorithms and bettermeans for quantifying the performance ofa given algorithm.It is the authors' belief that continued research on thisproblem in parallel with work on other aspects of the jointcoordination control problem [2] can lead to an entirely newclass of vehicles which may exhibit large performanceadvantages over existing vehicles in traversing very irregularterrain and in moving over soft soils. Although further basicresearch is needed before any practical machines can beconstructed, the possible advantages ofthis type of vehicle inapplications such as arctic transport, mining, agriculture,forestry, fire-fighting, explosive ordnance disposal, and evenin unmanned ocean-floor or planetary exploration, provideincentives for such work.
REFERENCES[1] M. G. Bekker, Introduction to Terrain-Vehicle Systems. Ann Arbor,
MI: Univ. Michigan Press, 1969.[2] R. B. McGhee, "Control of legged locomotion systems," Proc. Eigh-
teenth Joint Automatic Control Conf., San Francisco, CA, pp. 205-215, June 1977.
[3] D. E. Orin, R. B. McGhee, and V. C. Jaswa, "Interactive computer-control of a six-legged robot vehicle with optimization of stability,terrain adaptability, and energy," Proc. 1976 IEEE Conf. Decision andControl, Clearwater Beach, FL, Dec. 1976.
[4] J. R. Buckett, "Design of an on-board electronic joint control systemfor a hexapod vehicle," M.S. thesis, Ohio State Univ., Mar. 1977.
[5] C. S. Chao, "A software system for on-line control of a hexapodvehicle utilizing a multiprocessor computing structure," M.S. thesis,Ohio State Univ., Aug. 1977.
[6] R. L. Briggs, "Real-time digital control of an electrically poweredvehicle leg using vector force feedback," M.S. thesis, Ohio StateUniv., Dec. 1977.
[7] D. E. Okhotsimski, V. S. Gurfinkel, E. A. Devyanin, and A. K. Plat-onov, "Integrated walking robot development," presented at 1977Engineering Foundation Conf. Cybernetic Models of the Human Neuro-muscular System, Henniker, NH, Aug. 1977.
[8] D. E. Okhotsimski and A. K. Platonov, "Perceptive robot moving in3D world," Proc. IV Int. Joint Conf. Artificial Intelligence, Tbilisi.Georgian SSR, USSR, Sept. 1975.
[9] S. S. Sun, "A theoretical study of gaits for legged locomotionsystems," Ph.D. dissertation, Ohio State Univ., Mar. 1974.
[10] R. B. McGhee and S. S. Sun, "On the problem of selecting a gait for alegged vehicle," Proc. VI IFAC Symp. Automatic Conitrol in Space,Armenian S.S.R., USSR, Aug. 1974.
[11] A. P. Bessonov and N. V. Umnov, "The analysis of gaits in six leggedvehicles according to their static stability," Proc. Symp. Theory andPractice of Robots and Manipulators, International Centre forMechanical Sciences, Udine, Italy, Sept. 1973.
[12] , "Choice of geometric parameters of walking machines," OnTheory and Practice of Robots and Manipulators, Polish ScientificPublishers, Warsaw, 1976, pp. 63--74.
[13] R. Tomovic, "A general theoretical model of creeping displacement."Cybernetica, IV, pp. 98---107 (English translation), 1961.
[14] R. B. McGhee, "Some finite state aspects of legged locomotion,'Mathematical Biosciences, vol. 2, no. 1/2, pp. 67-84, Feb. 1968.
[15] M. Hildebrand, "Symmetrical gaits of horses," Science, vol. 150, pp.701-708, Nov. 1965.
[16] R. B. McGhee and A. A. Frank, "On the stability properties ofquadruped creeping gaits," Mathematical Biosciences, vol. 3, no. 3/4.pp. 331-351, Oct. 1968.
[17] E. 1. Kugushev and V. S. Jaroshevskij, "Problems of selecting a gaitfor an integrated locomotion robot," Proc. Fourth Int. Conf ArtificialIntelligence, Tbilisi, Georgian SSR, USSR, pp. 789-793, Sept. 1975.
[18] R. B. McGhee, "Robot locomotion," Neural Control of Locomotion,R. M. Herman et al., Eds. New York: Plenum Press. 1976, pp.237-264.
[19] D. M. Wilson, "Insect walking," Annual Review of Entomology, vol.11, pp. 103--121, 1966.
[20] ', "Stepping patterns in Tarantula spiders," J. Experimental Biol-ogy, vol. 47, pp. 133-151, 1967.
[21] P. E. Hart, N. J. Nilsson, and B. Raphael, "A formal basis for theheuristic determination of minimum cost paths," IEEE Trans.Systems Sci. Cybern., vol. SSC-4, no. 2, pp. 100-107, July 1968.
[22] P. J. Blatman, "Environmental modeling and model preprocessingfor a self-contained mobile robot," Proc. 1975 IEEE SMC Conf., SanFrancisco, CA, Sept. 1975.
[23] G. Hadley, Nonlinear and Dynamic Programming. Reading, MA:Addison-Wesley, 1964.
[24] D. E. Okotsimski et al., Problems of Constructing and Modelling theMotion of an Operator-Controlled Walking Machine, Preprint No.125, Institute of Applied Mathematics, Academy of Sciences of theUSSR, Moscow, 1974 (in Russian).
[25] R. S. Mosher, "Exploring the potential of quadruped," SAE PaperNo. 690191, presented at the Int. Automotive Engineering Conf.,Detroit, MI, Jan. 1969.
182











![Locomotion [2015]](https://static.fdocuments.net/doc/165x107/55d39c9ebb61ebfd268b46a2/locomotion-2015.jpg)




