
Adams Tracked Vehicle Toolkit 2018.1 新機能...Adams Tracked Vehicle 2018.1 2 OpenCRG...
7
Adams Tracked Vehicle 2018.1 1 Adams Tracked Vehicle Toolkit 2018.1 新機能
Transcript of Adams Tracked Vehicle Toolkit 2018.1 新機能...Adams Tracked Vehicle 2018.1 2 OpenCRG...

Adams Tracked Vehicle 2018.1 1
Adams Tracked Vehicle Toolkit
2018.1新機能
Adams Tracked Vehicle 2018.1 2
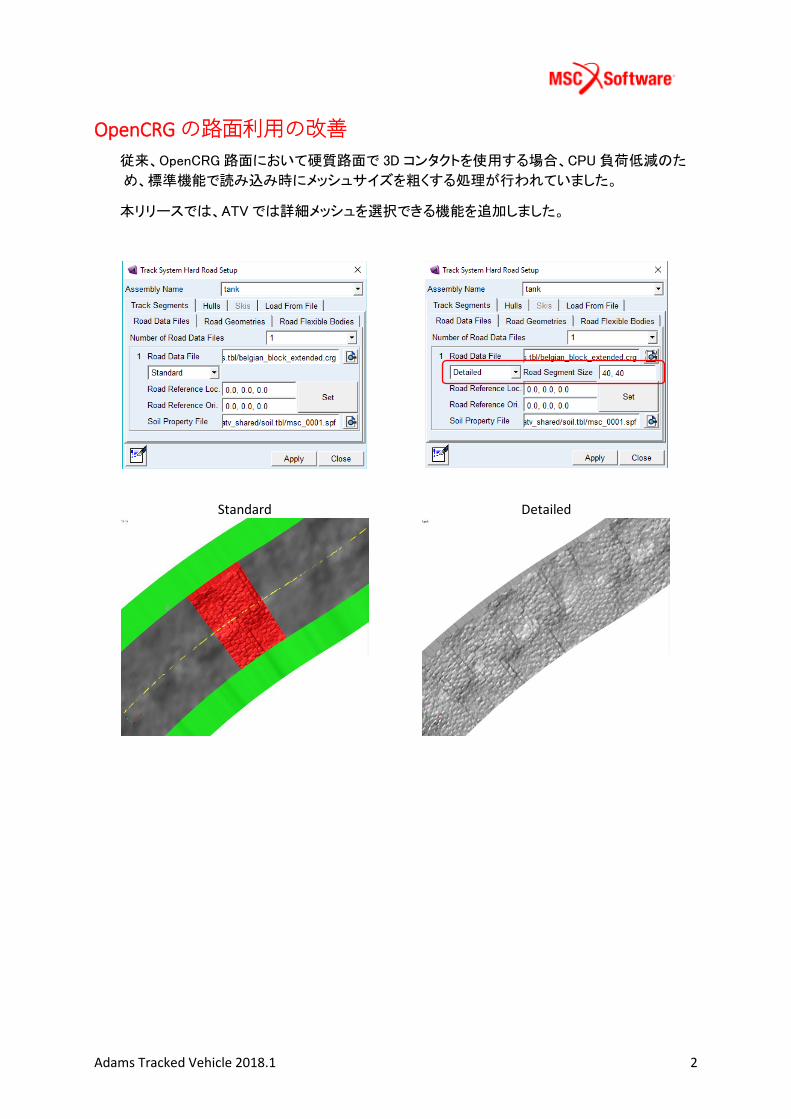
OpenCRG の路面利用の改善
従来、OpenCRG路面において硬質路面で 3D コンタクトを使用する場合、CPU負荷低減のた
め、標準機能で読み込み時にメッシュサイズを粗くする処理が行われていました。
本リリースでは、ATVでは詳細メッシュを選択できる機能を追加しました。
Standard Detailed

Adams Tracked Vehicle 2018.1 3
従来、Soft Soilには 3D メッシュの rdf ファイルしか使用できませんでしたが、本リリースより
OpenCRG ファイルも使用できるようになりました。
Soft Soil Setup
Soft soil 路面

Adams Tracked Vehicle 2018.1 4
ストリングトラックと Soft Soilの設定
従来、Soft Soilおよびストリングトラックに使用される rdx メッシュ路面の Xおよび Y方向の路
面区分の数を指定する必要がありました。
路面区分サイズと路面区分番号の指定を選択することができるようになりました。
*路面区分の数の指定
*路面区分の大きさの指定
路面区分の数の指定 路面区分の大きさの指定

Adams Tracked Vehicle 2018.1 5
解析ダイアログボックスの Tensioner setup の制御
従来、テンショナーの張力調整は初めの静解析時に実施していましたが、1回だけでは釣り合いが
取れない場合もありました。
Tensioner Setup: Tensioner Force または Track Tension の指定
解析のダイアログにおいて、ソルバーのパラメータを指定、変更して複数回の静解析を実施できま
すが、この画面上の各静解析で Tensioner Setupを行うか否かを設定することができるようになりま
した。これにより、解析の安定性を向上させることが可能となります。

Adams Tracked Vehicle 2018.1 6
回転力要素のための幾何形状の制御
従来、回転力要素は表示されるアイコン形状の大きさが固定されていましたが、表示のスケールを
変更できる機能を追加しました。
Before After
下記要素に有効です。
Rotational Spring
Rotational Damper
Rotational Bumpstop
Rotational Friction Damper

Adams Tracked Vehicle 2018.1 7
解析情報の自動保存
ATVの解析は時間がかかり、途中で解析が止まるなどの問題が起こることがあります。
本リリースでは、所定の間隔で自動 SAVEする機能が ATV解析セットアップに実装されました。こ
れにより解析中に問題が発生し、解析が中断された場合、RELOAD機能を使用して途中から解析
を再開することが可能となります。
下記環境変数で制御が可能です。
ENVIRONMENT ATV_SOLVER_SAVE_INTERVAL 10.0
tank_test.adm tank_test ! preferences/solverbias=cxx output/noseparator equilibrium/error=100.000000,maxit=250,stability=100.000000,imbalance=100.000000 simulate/static equilibrium/error=10.000000,maxit=250,stability=10.000000,imbalance=10.000000 simulate/static ! ! Save system done according to setting of ATV_SOLVER_SAVE_INTERVAL save/system, file=tank_test_0000.sav ! ! Reload system can be done by using the following command: !reload/system, file=tank_test_0000.sav, output_prefix=tank_test_reload_0000 simulate/dynamics, end=10.000000, dtout=0.010000 save/system, file=tank_test_0001.sav !reload/system, file=tank_test_0001.sav, output_prefix=tank_test_reload_0001 simulate/dynamics, end=20.000000, dtout=0.010000 save/system, file=tank_test_0002.sav !reload/system, file=tank_test_0002.sav, output_prefix=tank_test_reload_0002 simulate/dynamics, end=30.000000, dtout=0.010000 save/system, file=tank_test_0003.sav !reload/system, file=tank_test_0003.sav, output_prefix=tank_test_reload_0003 simulate/dynamics, end=40.000000, dtout=0.010000 save/system, file=tank_test_0004.sav !reload/system, file=tank_test_0004.sav, output_prefix=tank_test_reload_0004 simulate/dynamics, end=50.000000, dtout=0.010000 save/system, file=tank_test_0005.sav !reload/system, file=tank_test_0005.sav, output_prefix=tank_test_reload_0005 simulate/dynamics, end=60.000000, dtout=0.010000 save/system, file=tank_test_0006.sav !reload/system, file=tank_test_0006.sav, output_prefix=tank_test_reload_0006 ! STOP


















