By: Craig Chan & Olusegun Michael Abidoye Advisor: Steven Gutschlag 27 April 2005

Active Suspension SystemJosh Rose, Xander Serrurier, Rhydon Vassay, Chase Ramseyer
Advisor: Steven Gutschlag4/27/2017

Outline
1. Project Summary
2. Previous Work
3. Functional Description
4. System Block Diagram
5. Work Completed/Results
6. Future Work
7. Questions
2

Project SummarySuspension Systems
● Purpose○ Used to support the chassis of a vehicle on
its axles○ Used to prevent chassis movements
caused by road imperfections to the car’s passengers
● Primary types○ Passive○ Active○ Hybrid (semi-active)
3

4
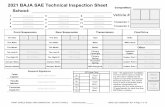
Suspension system type Passive suspension system Semi-active suspension system
Active suspension system
Regulatory element General shock absorber Adjustable damping Hydraulic system or Servo motor system
Action principle Damping constant Damping continuously adjustable
Adjust the force between wheel and vehicle body
Control method No Hydraulic Electronics or fluid control
Bandwidth Unknown Up to 20Hz > 15Hz
Energy consumption Zero Minimal Significant
Lateral dynamics control Poor Moderate Good
Vertical dynamics control Poor Moderate Good
Cost Lowest Middle Highest
Project SummarySuspension Systems

5
Project SummaryObjectives
● Redesign existing active suspension system● Design/implement safety measures● Design power electronics to operate existing
hardware● Develop rudimentary control software

● Real-time disturbance minimization● Applications
○ Cars, tractors, off-road vehicles○ Chassis suspension○ Cab/seat suspension
6
Project SummaryACTSS Overview

● Developed power electronics○ H-bridge○ Snubber circuits○ Isolation circuits
● Developed proportional control system● Disturbance cancelled:
○ 75% with load○ 87.5% without load
7
Project SummaryPrevious Work

Previous WorkHardware Specifications
● EMAC Micropac 535○ 11MHz on-board crystal○ Separate LCD/keypad interfaces○ 8 10-bit ADC channels○ 24 digital IO○ 3 EIA-232 serial ports○ Programmed in Assembly
8

● MSK4227 H-Bridge○ 200V, 20A rating (Tc = 25° C)○ 20µA logic input current○ 1µs minimum switching dead time
required○ Direct-mounted heatsink with forced
convection
9
Previous WorkHardware Specifications

● 4N25 Optical Isolator○ 5V supply voltage○ 10mA enable current○ Max 70V output○ 50mA output current○ 2µs switching speed○ 5000V isolation voltage
10
Previous WorkHardware Specifications

● IDC EC2-H Electric Cylinder○ 160V DC, 12A○ 3600N max thrust○ 930mm/sec max no load speed
■ 1 in/ 27.2ms○ 5.0N-m max torque
11
Previous WorkHardware Specifications

● Position Sensors (P1613)○ Light duty potentiometer○ 2 in bidirectional travel○ 2K Ohms
● 3-Phase Motor (4Z394)● Camshaft (VPLE-212)
○ 1in displacement
12
Previous WorkHardware Specifications

● Atmel ATmega 128 Microcontroller○ Personal extensive experience○ Code development in embedded C○ 6MHz on-board crystal○ 8 10-bit ADC channels○ 53 digital IO channels○ 2 serial ports
13
Current Hardware List

● 6N137 Optical Isolator○ 5V supply voltage○ 15mA enable current○ Logic-level output○ 50mA output current○ 10Mega-Baud switching speed○ 5300V isolation voltage
14
Current Hardware List

Functional DescriptionSystem Overview
15

System Block DiagramsSubsystem Overview
PWMAD
C
Upper Position Sensor
Pow
er
Ele
ctro
nics
Act
uato
r
Upper Platform
Keypad Microcontroller
Em_Stop
Linear Actuator
PWM
Mot
or
Lower Position Sensor
LCD
16

17
System Block DiagramsConceptual Flow Chart

18
System Block DiagramsH-Bridge Overview
NC
NC
+VCC
+VB
HINA
LINA
HINB
LINB
COM
COM
V+
V+
B0
B0
A0
A0
BV-
BV-
AV-
AV-

19
Work Completed/ResultsH-Bridge Isolation

20
Gate Drive Circuit
HINA
LINA
LINB
HINB
Work Completed/ResultsH-Bridge With Isolation

21
H-bridge output(e.g. A0)
Optical Isolator output
Switching Signal(From Function Generator)
Work Completed/ResultsH-Bridge Testing

22
Work Completed/ResultsTesting the Potentiometer

23
Work Completed/ResultsVoltage Regulator Circuits

24
Work Completed/ResultsSnubber Circuit

25
Work Completed/ResultsPSpice Simulations

26
Work Completed/ResultsPSpice Simulations
Load Current

27
Work Completed/ResultsPSpice Simulations
Load Voltage

● PWM creation○ Timer/count match interrupt
● Feedback○ ADC interrupt
● User interface○ Keypad○ LCD○ External interrupts
28
Work Completed/ResultsSoftware

SoftwarePWM Creation
● Timer/counter 1 ○ Fast PWM mode
● Output compare○ OCCR1A○ OCCR1B
29

● ADC interrupt○ Indicates conversion
complete● Calculation
○ Input from potentiometer○ Determines position based
on voltage
30
SoftwareFeedback (ADC)

● Run with control system
● Run without control system
● Manually extend/retract actuator
31
SoftwareUser Interface

32
ResultsSimulations

33
ResultsSimulations

● Physical isolation● Reduced reaction time● Heat dissipation● Emergency control
○ Limit switches○ Emergency stop
34
ResultsSafety Design

35
ResultsSafety Design

36
Part Description Quantity Cost ($) Supplier Purchased
Atmega128A Dev Kit Microcontroller and Development Board
1 39.99 Waveshare Y
Keypad Keypad 1 7.49 Vetco Y
LCD (HD44780) LCD Display 1 5.28 Ebay Y
AVR Dragon Atmega128 Programmer 1 53.75 Mouser Y
MSK4227 H-Bridge 1 Unavailable MSK N
PS21A79 Replacement H-Bridge 2 73.47 Digikey Y
6N137 Optical Isolator 4 0.49 Mouser N
IDC Electric Cylinder EC2H Linear Actuator 1 540.00 Amazon N
Maurey Linear Motion Sensor P1613
Position Sensor 2 300.00 Process Industrial Surplus Corp N
Maxi-Torq 4z394 3-Phase Motor 1 535.00 Amazon N
VPLE-212 Camshaft 1 83.10 Motion Industries N
Parts List

37
Part Description Quantity Cost ($) Supplier Purchased
ADXL335 Accelerometer 1 9.90 Digikey Y
51-256.025 Emergency Stop 23.91 Newark Y
HEV2AN-P-DC24V Power Relay 1 66.47 Newark Y
MY4N-D2-DC24 4 Pole Relay 2 30.73 Digikey N
NBF-32016 Enclosure 1 22.20 Amazon Y
LM317 Voltage Regulator 2 0.71 Digikey N
7805 Voltage Regulator 1 0.62 Digikey N
7815 Voltage Regulator 1 0.64 Digikey N
EE80251S2-000U-999 Cooling Fan 1 3.42 Digikey N
Parts List
Total Cost $445.45

38
Task Worked on by Completed
Research All Yes
Software Development Xander, Chase Yes
Test Actuator Rhydon, Josh Yes
Test H-Bridge All Yes
Test Position Sensors Josh, Rhydon Yes
Snubber Circuit Design Rhydon, Josh Yes
PSpice Simulations Josh Yes
Develop Rudimentary Control System Xander, Chase Testing
Safety Design Chase, Josh Yes
Assemble System All Yes
Run Test Cases on System All Testing
Documentation All Yes
Division of Labor

● Design/mount additional physical safety measures○ Front shield○ Top shield
● Develop a more complex position-based control scheme
● Design and implement an acceleration-based control system using an accelerometer
39
Future Work

● Previous Senior Projects:○ Patrice Jackson and Shawn Downey (2003)
http://ee.bradley.edu/projects/proj2003/vanchoco/
○ Blake Boe and Tyson Richards (2006)
http://ee.bradley.edu/projects/proj2006/actss/
● Research Papers○ [1] W.K.N. Anakwa. “Development and Control of a
Prototype Pneumatic Active Suspension System.” Bradley University, IL, Oct. 2001.
○ [2] Q. Zhou. “Research and Simulation on New Active Suspension Control System.” Lehigh University, PA, 2013.
40
References

Questions?

Regulator Power Calculations
P12V = 2.328WP15V = 0.030WP5V = 0.114W
TJ = PRJA + TA
T12V = 106.48 ℃
42