ACRt-I - FOM - D00204472
182
Array Compensated True Resistivity Tool (ACRt TM ) Field Operations Manual Revision F March 2009 D00204472
Transcript of ACRt-I - FOM - D00204472

Array Compensated True Resistivity Tool (ACRtTM)
Field Operations Manual
Revision F March 2009 D00204472

ii ACRt Field Operations Manual D00204472 Rev E
All information contained in this publication is confidential and proprietary property of Halliburton Company. Any reproduction or use of these instructions, drawings or photographs without the express written permission of an officer of Halliburton Company is forbidden. © Copyright 2005 Halliburton Company All Rights Reserved. Printed in the United States of America The drawings in this manual were the most recent revisions and the best quality available at the time this manual was printed. We recommend that you check your manual for individual drawing clarity and revision level. Should you have equipment with revisions later than the drawings in this manual, or should you require higher quality drawings than the drawings in this manual; Replacements can be ordered from the Engineering Print Room in Houston.

Halliburton Energy Services
D00204472 Rev E ACRt Field Operations Manual iii
Revision Record Array Compensated True Resistivity Tool REV DATE Description A Jan/07 Initial Release B Aug/07 Updated Calibration formats for both HES and Customer. C Jan/08 Replaced IQ and INSITE with LOGIQ. D Feb/08 Calibration safety operation procedure and related OEB/NOMEMs update OEB-2006_022: Standardization of the Induction Calibration Stand (Page 67) NOMEM_352: Induction Calibration Stand Testing and Inspection (Page 67) E Dec/08 Transportation and lifting sleeve recommended.
OEB_2008_068: transportation and lifting sleeve (pages 119, 53 and 56) F Mar/09 ACRt Parameter Editor update (page 46)
D00229028_C INSTALLATION, INSPECTION, AND LOAD TESTING REQUIREMENTS, INDUCTION CALIBRATION FACILITIES
PAPERS SPE_101930, SPWLA38th, and SPWLA40th (Section 6) Appendix_B A novel Borehole Correction
Revision

Halliburton Energy Services
iv ACRt Field Operations Manual D00204472 Rev E
This page left intentionally blank.

Halliburton Energy Services
D00204472 Rev E ACRt Field Operations Manual v
Table of Contents Revision Record........................................................................................................................... iii Table of Contents.......................................................................................................................... v List of Figures .............................................................................................................................. ix List of Tables................................................................................................................................ xi Preface........................................................................................................................................xiii Section 1 – General Information .................................................................................................15 Introduction .................................................................................................................................15
Tool Description ....................................................................................................................................... 15 Tool Enhancements & Improvements...................................................................................................... 16
Tool Length (Asymmetric Design) ...................................................................................................... 16 Ceramic Components......................................................................................................................... 17 Temperature Correction Algorithm ..................................................................................................... 17 Automatic Borehole Correction Algorithm .......................................................................................... 17 Software Focusing Algorithm ............................................................................................................. 17 Triple Frequency Array ....................................................................................................................... 18 SP....................................................................................................................................................... 18
Equipment List ......................................................................................................................................... 19 Equipment List ......................................................................................................................................... 19 Mnemonic List.......................................................................................................................................... 19
Theory of Operation ....................................................................................................................25 Nature of the Measurement ..................................................................................................................... 25 Skin Effect Correction: ............................................................................................................................. 27 Bore Hole Correction ............................................................................................................................... 30
Contents

Halliburton Energy Services
vi ACRt Field Operations Manual D00204472 Rev E
Software Focusing ................................................................................................................................... 34 Parameters .............................................................................................................................................. 34
Section 2 – Safety.......................................................................................................................35 Danger to Personnel ...................................................................................................................35 Explosives...................................................................................................................................36 High Voltages..............................................................................................................................36 Heavy Equipment........................................................................................................................36 Equipment Hazards ....................................................................................................................36 Notes, Cautions and Warnings ...................................................................................................36 Section 3 – Operating Procedures..............................................................................................37 Introduction .................................................................................................................................37
INSITE Data Acquisition .......................................................................................................................... 37 LOGIQ Wireline Tool Selection................................................................................................................ 37 Service Setup........................................................................................................................................... 38 Tool Power Up ......................................................................................................................................... 38 Calibration Procedures ............................................................................................................................ 38 Miscellaneous .......................................................................................................................................... 38 Service Setup........................................................................................................................................... 41
ACRtTM Transportation and Handling ..........................................................................................53 Fiberglass Sleeves......................................................................................................................53 Pre-and Post-Job Inspection.......................................................................................................53 Wellsite Operations.....................................................................................................................53
Preparation ......................................................................................................................................... 53 ACRtTM Limitations......................................................................................................................54
Hole Sizes: ......................................................................................................................................... 54 Temperature and Pressure:................................................................................................................ 55 Resistivity Measurements:.................................................................................................................. 55 Drilling Fluids and service selection: .................................................................................................. 55
Logging .......................................................................................................................................56 Rig up and down...................................................................................................................................... 56 Tool power up and functional check ........................................................................................................ 57
Logging Flash Table Parameter Editor............................................................................................... 58 Standard Colors and Dash codes for INSITE..................................................................................... 61 Repeatability....................................................................................................................................... 62 Real Time Quality Control .................................................................................................................. 62
Section 4 – Calibration................................................................................................................65

Halliburton Energy Services
D00204472 Rev E ACRt Field Operations Manual vii
ACRtTM Calibration......................................................................................................................65 Shop Calibration .........................................................................................................................65
Loop Off Calibration................................................................................................................................. 66 Loop On Calibration................................................................................................................................. 66 Free Air Calibration.................................................................................................................................. 66
Calibrations Procedures Flow Chart ...........................................................................................67 Calibration Preparation ...............................................................................................................69 Calibration Steps.........................................................................................................................73 Calibration and Survey Problems ...............................................................................................96
Shop Calibration Problem........................................................................................................................ 96 Sonde General Properties ..........................................................................................................99 Section 6 – Reference Material................................................................................................107 Appendix A – Calibration Theory ..............................................................................................115 General Information ..................................................................................................................115 Appendix B – A Novel Borehole Correction ..............................................................................133 Appendix C – ACRtTM Algorithm Theory ...................................................................................148 Inversion with a Quantitative Pattern Recognition ....................................................................148 Appendix D – OEBs/NOMEMs, Induction Tool Calibration Fixture Standard & Inspection ......175

Halliburton Energy Services
viii ACRt Field Operations Manual D00204472 Rev E
This page left intentionally blank.

Halliburton Energy Services
D00204472 Rev E ACRt Field Operations Manual ix
List of Figures Figure 1 Simple Induction Tool Diagram.............................................................................................26 Figure 2 ACRtTM Response in Homogeneous Formation ..................................................................27 Figure 3 ACRtTM Response in Homogeneous Formation 12KHz Frequency...................................27 Figure 4 ACRtTM Skin Effect Corrected Response in Homogeneous Formation...........................28 Figure 5 ACRtTM Skin Effect Correction Log Example........................................................................29 Figure 6 Automatic Borehole Correction Algorithm ..........................................................................31 Figure 7 Skin Effect Corrected ACRtTM Data .......................................................................................31 Figure 8 Bore Hole Corrected ACRtTM Data.........................................................................................32 Figure 9 ACRtTM Skin Effect VS Borehole Corrections Log Example...............................................33 Figure 10 ACRtTM Software Focusing Results ....................................................................................34 Figure 11 INSITE Data Acquisition Task Flow - Manage a data acquisition session......................39 Figure 12 NSITE Toolstring Configuration Flow Chart ......................................................................40 Figure 13 Wireline INSITE Data Acquisition Start up Window ..........................................................41 Figure 14 Data Acquisition Initial Setup Window ...............................................................................42 Figure 15 Service Selection Window ...................................................................................................43 Figure 16 Adding an ACRtTM Serial Number to the Service...............................................................44 Figure 17 Adding an ACRtTM Serial Number to the Service ACRtTM Node........................................44 Figure 18 GTET – ACRtTM Service Tool String Setup .........................................................................45 Figure 19 Save As Service ....................................................................................................................46 Figure 20 Loading the Service..............................................................................................................46 Figure 21 Parameter Window Editor ....................................................................................................47 Figure 22 Power Display Graphical User Interface.............................................................................47 Figure 23 Data Acquisition Initialization Panel ...................................................................................48 Figure 24 Powering up the GTET- ACRtTM...........................................................................................49 Figure 25 GTET- ACRtTM Initialized Properly.......................................................................................50 Figure 26 Data Acquisition....................................................................................................................50 Figure 27 Alternative Method to Open the Tool Data Monitor...........................................................50 Figure 28 Tool Data and Result Data Monitor Windows ....................................................................51 Figure 29 Data Acquisition ACRtTM Waveforms Window setup ........................................................52 Figure 30 ACRtTM Waveforms Window ................................................................................................52 Figure 31 Calibration Task Flow...........................................................................................................67 Figure 32 Recommended ACRtTM / HACRt Calibration Area .............................................................68 Figure 33 Tool string, ACRt calibration ...............................................................................................70 Figure 34 Thermometer & Cabbage head connected.........................................................................70 Figure 35 Tie the tag lines at top and bottom of ACRt.......................................................................71 Figure 36 Tool slings in correct position, ACRt calibration ..............................................................71
Figures

Halliburton Energy Services
x ACRt Field Operations Manual D00204472 Rev E
Figure 37 Keep tool balanced, ACRt calibration.................................................................................72 Figure 38 ACRt on post stands ready for calibration.........................................................................72 Figure 39 INSITE System Manager Window........................................................................................73 Figure 40 INSITE Data Acquisition – Initial Setup ..............................................................................74 Figure 41 INSITE Service Selections – Initial Setup ...........................................................................74 Figure 42 INSITE Parameter Window Editor........................................................................................75 Figure 43 INSITE Data Acquisition Window ........................................................................................75 Figure 44 INSITE Data Acquisition Window ........................................................................................76 Figure 45 INSITE Events Log Window .................................................................................................76 Figure 46 INSITE DAQ Tool Initialization Windows ............................................................................77 Figure 47 Parameter Window Editor ....................................................................................................78 Figure 48 INSITE Data Acquisition Window Calibration Configuration Option...............................78 Figure 49 INSITE Tool Calibration Window Setup ..............................................................................79 Figure 50 INSITE Tool Calibration Window setup coefficient options .............................................79 Figure 51 INSITE Tool Calibration Window Setup ..............................................................................80 Figure 52 INSITE Tool Calibration New Coefficient File loading setup ............................................80 Figure 53 INSITE Tool Calibration Window Setup ..............................................................................81 Figure 54 INSITE Tool Calibration Window Setup ..............................................................................81 Figure 55 INSITE Tool Calibration Window Setup ..............................................................................82 Figure 56 INSITE Tool Calibration Window Loop Off .........................................................................82 Figure 57 INSITE Tool Calibration Window Loop Off complete step................................................83 Figure 58 INSITE Tool Calibration Window Loop On slide step........................................................83 Figure 59 INSITE Tool Calibration Window Loop On beginning step ..............................................84 Figure 60 INSITE Tool Calibration Window Loop On complete step................................................84 Figure 61 INSITE Tool Calibration Window free Space Previous step .............................................85 Figure 62 INSITE Tool Calibration Window Free Space step ............................................................85 Figure 63 INSITE Tool Calibration Window Setup ..............................................................................86 Figure 64 INSITE Tool Calibration Window Sonde error step ...........................................................86 Figure 65 INSITE Tool Calibration Window Setup ..............................................................................87 Figure 66 INSITE Tool Calibration Mud Cell step 4 ............................................................................87 Figure 67 INSITE Tool Calibration Window Setup ..............................................................................89 Figure 68 INSITE Tool Calibration Report, HES Format.....................................................................90 Figure 69 INSITE Tool Calibration Report, HES Format.....................................................................91 Figure 70 INSITE Tool Calibration Report, HES Format.....................................................................92 Figure 71 INSITE Tool Calibration Report, HES Format.....................................................................93 Figure 72 INSITE Tool Calibration Report, HES Format.....................................................................94 Figure 73 INSITE Tool Calibration Report, Customer Format ...........................................................95 Figure 74 ACRtTM Sonde Tool ...............................................................................................................99 Figure 75 Schematic of typical calibration steps: (a) “loop-off” step; (b) “loop-on” step; (c) “air-
hang” step.......................................................................................................................................121 Figure 76 68a ........................................................................................................................................122 Figure 77 68b ........................................................................................................................................123 Figure 78 68c ........................................................................................................................................124 Figure 79 71a ........................................................................................................................................125 Figure 80 71b ........................................................................................................................................126 Figure 81 71c ........................................................................................................................................126 Figure 82 74a ........................................................................................................................................127 Figure 83 74b ........................................................................................................................................128 Figure 84 74c ........................................................................................................................................128 Figure 85 77a ........................................................................................................................................129

Halliburton Energy Services
D00204472 Rev E ACRt Field Operations Manual xi
List of Tables Table 1 ACRtTM Enhancements..............................................................................................................16 Table 2 ACRtTM Standard Equipment ....................................................................................................19 Table 3 ACRtTM Auxiliary Equipment ....................................................................................................19 Table 4 ACRtTM Results Mnemonics (R_ACRt) ....................................................................................19 Table 5 ACRtTM Results Mnemonics Cont’d .........................................................................................20 Table 6 ACRtTM Results Mnemonics Cont’d .........................................................................................21 Table 7 ACRtTM Input Mnemonics (I_ACRt) ........................................................................................21 Table 8 ACRtTM Input Mnemonics Cont’d .............................................................................................22 Table 9 ACRtTM Telemetry Mnemonics (T_ACRt)...............................................................................23 Table 10 ACRtTM Telemetry Mnemonics Cont’d .................................................................................24 Table 11 Ohm Check – Instrument Section – Top Connector – Pin-to-Pin ......................................109 Table 12 Ohm Check – Instrument Section – Top Connector to Bottom Connector ......................109 Table 13 Ohm Check – Instrument Section – Top Connector to Case .............................................109 Table 14 Ohm Check – Instrument Section – Bottom Connector to Case .......................................110 Table 15 ACRtTM / HACRt peak positions and readings of calibration loop sweeping..................120
Tables

Halliburton Energy Services
xii ACRt Field Operations Manual D00204472 Rev E
This page left intentionally blank.

Halliburton Energy Services
D00204472 Rev E ACRt Field Operations Manual xiii
Preface This Field Operations Manual provides General and Operational information for the Array Compensated True Resistivity tool. Study the manual to develop a thorough understanding of the tool before operating or servicing it for the first time. Observe all notes, cautions and warnings to minimize the risk of personal injury or damage to the equipment.
Section 1 General Information – contains ACRtTM tool specifications, tool description, equipment lists, mnemonic tables, theory of operation as well as the functional diagrams for the ACRtTM.
Section 2 Safety – contains safety procedures and references that must be observed in order to reduce the risk of death or injury to personnel and minimize the risk of equipment damage, destruction, or loss of operating effectiveness.
Section 3 Operating Procedures – contains tool configuration information and procedures for non-well site and well site operations.
Section 4 Log Quality Control and Troubleshooting – contains information regarding real-time log quality assurance, region specific log examples and troubleshooting guide for the ACRtTM tool.
Section 5 Maintenance – contains information on tool maintenance.
Section 6 Reference Material – contains a list of reference documents referred to in this manual. (In addition, supplemental materials are included that contain information useful in operating, maintaining, and troubleshooting the tool.)
Appendix A Calibration Theory
Appendix B ACRtTM Algorithm Theory
Appendix C OEBs
Preface

Halliburton Energy Services
xiv ACRt Field Operations Manual D00204472 Rev E
This page left intentionally blank.

Halliburton Energy Services
D00204472 Rev E ACRt Field Operations Manual 15
Section 1 – General Information
Introduction
Tool Description
The LOGIQ Array Compensated True Resistivity tool (ACRtTM) is an LOGIQ compatible electric logging tool. The ACRtTM tool uses the principles of magnetic induction to determine the conductivity of geologic strata. The tool contains a transmitter, which generates an alternating magnetic field, and a receiving array that constantly measures this field. As the magnetic fields expand and collapse they will induce eddy currents in the surrounding formations, and these currents will induce magnetic fields of their own. As the ACRtTM is lifted through the borehole, the system will constantly measure and record data on the magnetic fields produced by the transmitter and by these eddy currents. By interpreting the data, the conductivity of the various strata the tool passes through can be determined.
A single transmitter coil generates magnetic fields at 12 kHz, 36 kHz and 72 kHz. The primary signals of the Array Induction are collected by a 6-receiver coil array. Receiver coils are positioned at 6, 10, 17, 29, 50 and 80 inches from the transmitter coil. The transmitter-to-main receiver spacing controls the depth of investigation and allows the ACRtTM to make deep elemental measurements with high-vertical resolution. The ACRtTM outputs radial depth of investigation curves at depths of 10”, 20”, 30”, 60” and 90”. Curves for all depths are processed at one, two and four-foot vertical resolutions. The ACRtTM readings can also be resolution matched to the MRIL Prime with a 4-foot vertical resolution. The tool also provides a borehole fluid resistivity measurement (Rm) that is utilized along with the shallow arrays to compensate for borehole irregularities and tool position in the well.
Section
1

Halliburton Energy Services
16 ACRt Field Operations Manual D00204472 Rev E
Tool Enhancements & Improvements
The ACRtTM features a number of improvements over the previous generation of induction tools. The table below outlines the key features of the tool.
Table 1 ACRtTM Enhancements
Tool Attributes Benefits
1. Tool Length (Asymmetric Design) Less susceptible to erratic tool movement.
2. Ceramic Components (Shorter Arrays)
Decreased sensitivity to thermal expansion
Improved Accuracy & Repeatability
Improved Rxo Measurement
3. Temperature Correction Algorithm Increased Accuracy & Repeatability
Based on Tool Specific Temp Coefficients
4. Adaptive Borehole Correction Algorithm Improved Radial Profile Reliability
Improved reliability of short array measurements
5. Software Focusing Algorithm Improved Radial Profile Reliability
Improved Rt Measurement
6. Triple Frequency Array Improved Skin Effect Corrections
Improved response in high conductivity formations
7. SP SP Buttons integrated with Sonde.
Tool Length (Asymmetric Design) The ACRtTM is significantly shorter than previous induction tools. The Sonde / Pre-Amplifier section measures approximately 173.5”. The instrument section measures approximately 60.33”, making the entire tool 233.92” (19.5 ft). The shorter tool length should increase the ability of the ACRtTM to traverse the borehole as well as move some of the sensors above the ACRtTM lower in the borehole. The most significant benefit of the asymmetric design is the elimination of balancing the measurement of two independent coils to arrive at a single output, especially in boreholes prone to producing erratic tool movement. The asymmetric design results in improved repeatability and accuracy.

Halliburton Energy Services
D00204472 Rev E ACRt Field Operations Manual 17
Ceramic Components The close proximity of the short arrays and the transmitter in the ACRtTM demands the use of a material with a low and predictable thermal coefficient of expansion. The short spaced coils are wrapped around ceramic bobbins and the spacers used to “tune” the array are made of the same material. The use of ceramic insures stability of the arrays and therefore improves the reliability and accuracy of the radial measurements as well as Rt.
Temperature Correction Algorithm The temperature correction algorithm for the ACRtTM utilizes a heat transfer model based on tool-specific coefficients. Each individual sonde is characterized during a heat cycle and the coefficients generated are stored with the tool. There are two temperature sensors (RTD – Resistance Temperature Detectors) placed on the feedpipe of the sonde. The feedpipe is utilized to route wires through the sonde to the appropriate array coils and it shields the signal on these wires from the signal of the transmitter coil. The feedpipe is fabricated of copper and has an effect on the characteristics of each coil array that changes with temperature. In order to compensate for this change, the feedpipe temperature is measured. One RTD is located under the ceramic bobbins and the other under the fiberglass portion of the sonde. The additional sensor allows for more accurate modeling of the temperature distribution in the feedpipe. The additional sensor coupled with the tool-specific coefficients helps to improve the accuracy and repeatability of the tool.
Automatic Borehole Correction Algorithm This Bore Hole Correction algorithm utilizes a multitude of inputs to yield a more accurate and repeatable radial profile. Previous generation tools relied on inputs from the caliper and mud resistivity Rm to help develop the radial profile for the tool. This algorithm uses those inputs as well as an inversion of the shallow arrays to assist in determining the position of the tool in the well bore. The algorithm then uses comparative and iterative methods to determine the appropriate corrections to be applied based on pre-calculated geometric factors stored in the form of a 4-dimension matrix. The net result is a more robust radial profile.
Software Focusing Algorithm Conventional tools attempt to “focus” the tool response using carefully selected coil arrangements. The “focusing” is therefore fixed by the tool design. In array induction tools, the measurements from the various arrays are combined and filtered through a software algorithm to achieve “focusing” of the tool response, thus the name, software focusing. The term “focusing” refers to a process to enhance the response contribution from an area of interest (specific depth of investigation in the formation) while reducing the response contribution from the other areas (i.e. the borehole). The method of software focusing used in the ACRtTM is called “2-D” or two-dimensional. The 2-D refers to simultaneous processing in the vertical as well as radial directions. The software focusing method utilized by the ACRtTM produces a much-improved radial profile as well as a more accurate measurement of Rt.

Halliburton Energy Services
18 ACRt Field Operations Manual D00204472 Rev E
Triple Frequency Array The ACRtTM utilizes three frequencies (12 kHz, 36 kHz and 72 kHz) to alleviate the problems created by skin effect. Skin effect is a tendency for alternating current (AC) to flow mostly near the outer surface of a solid electrical conductor. The effect becomes amplified as the frequency increases and as conductivity increases. With respect to an induction logging tool, this phenomena reduces the apparent conductivity measurement and alters the predicted geometric factor. This is of particular importance in low resistivity formations. The ACRtTM, by virtue of utilizing three frequencies increases the operating range of the tool and improves the tools resistance to skin effect. This method uses only the in-phase signal and ignores the noise prone and unstable quadrature (X) signal. The result is improved response and accuracy in highly conductive formations.
SP The SP button is mechanically integrated into the ACRtTM. The previous generation of induction tool suffered from leakage due to pressure forcing the SP electrode to be removed from the sonde. These tools also utilized a separate SP sub P/N 101333194) to generate a SP curve. The ACRtTM buttons serve as the SP sensors, as well as the oil fill ports in the lower section of the sonde. The result is an improved SP response coupled with improved mechanical integrity.
A DRAFT of the Tool Specifications can be found at the following link: http://halcape001.corp.halliburton.com/PublishedDocs/Specification_D00220439_1.doc

Halliburton Energy Services
D00204472 Rev E ACRt Field Operations Manual 19
Equipment List
Table 2 ACRtTM Standard Equipment
Description Part NO. Observations
Tool, Induction, Array Compensated True Resistivity 101382722
Section, Sonde/Pre-Amp, ACRtTM 101392072
Section, Electronics Assembly, ACRtTM 101429228
Transportation and lifting sleeve 101657392 OEB-2008/068, Recommend
ACRtTM Standoff 100015011
Cabbage Head – Molded Hole Finder 100135165 J-Latch 6.0” O.D.
Calibration Wheel 100140946 Same as used with HRI
HRI/HRAI/ ACRtTM Calibration Resistor 100004136 0.417 ohm +/- 0.005 ohm
Thread Protector, 3 5/8” , Male 100132237
Thread Protector, 3 5/8” , Female 100132239
Spanner Wrench 100007583
Table 3 ACRtTM Auxiliary Equipment
Description Part NO.
Oil: DC 200 100124481
Mud Sensor Removal Tool 100144438
Oil Bladder Insertion Tool 101458544
Oil Level Gauge 101455286
Oil Fill Kit 101349815
Mnemonic List
Table 4 ACRtTM Results Mnemonics (R_ACRt)
NO. Mnemonic Description
1. RO90 90 in. Resistivity – 1 ft. Vertical Resolution – ohm-m
2. RO60 60 in. Resistivity – 1 ft. Vertical Resolution – ohm-m
3. RO30 30 in. Resistivity – 1 ft. Vertical Resolution – ohm-m
4. RO20 20 in. Resistivity – 1 ft. Vertical Resolution – ohm-m
5. RO10 10 in. Resistivity – 1 ft. Vertical Resolution – ohm-m
6. RO06 06 in. Resistivity – 1 ft. Vertical Resolution – ohm-m
7. RT90 90 in. Resistivity – 2 ft. Vertical Resolution – ohm-m

Halliburton Energy Services
20 ACRt Field Operations Manual D00204472 Rev E
8. RT60 60 in. Resistivity – 2 ft. Vertical Resolution – ohm-m
Table 5 ACRtTM Results Mnemonics Cont’d NO. Mnemonic Description
9. RT30 30 in. Resistivity – 2 ft. Vertical Resolution – ohm-m
10. RT20 20 in. Resistivity – 2 ft. Vertical Resolution – ohm-m
11. RT10 10 in. Resistivity – 2 ft. Vertical Resolution – ohm-m
12. RT06 06 in. Resistivity – 2 ft. Vertical Resolution – ohm-m
13. RF90 90 in. Resistivity – 4 ft. Vertical Resolution – ohm-m
14. RF60 60 in. Resistivity – 4 ft. Vertical Resolution – ohm-m
15. RF30 30 in. Resistivity – 4 ft. Vertical Resolution – ohm-m
16. RF20 20 in. Resistivity – 4 ft. Vertical Resolution – ohm-m
17. RF10 10 in. Resistivity – 4 ft. Vertical Resolution – ohm-m
18. RF06 06 in. Resistivity – 4 ft. Vertical Resolution – ohm-m
19. CO90 90 in. Conductivity – 1 ft. Vertical Resolution - mmho
20. CO60 60 in. Conductivity – 1 ft. Vertical Resolution - mmho
21. CO30 30 in. Conductivity – 1 ft. Vertical Resolution - mmho
22. CO20 20 in. Conductivity – 1 ft. Vertical Resolution - mmho
23. CO10 10 in. Conductivity – 1 ft. Vertical Resolution - mmho
24. CO6 06 in. Conductivity – 1 ft. Vertical Resolution - mmho
25. CT90 90 in. Conductivity – 2 ft. Vertical Resolution - mmho
26. CT60 60 in. Conductivity – 2 ft. Vertical Resolution - mmho
27. CT30 30 in. Conductivity – 2 ft. Vertical Resolution - mmho
28. CT20 20 in. Conductivity – 2 ft. Vertical Resolution - mmho
29. CT10 10 in. Conductivity – 2 ft. Vertical Resolution - mmho
30. CT6 06 in. Conductivity – 2 ft. Vertical Resolution - mmho
31. CF90 90 in. Conductivity – 4 ft. Vertical Resolution - mmho
32. CF60 60 in. Conductivity – 4 ft. Vertical Resolution - mmho
33. CF30 30 in. Conductivity – 4 ft. Vertical Resolution - mmho
34. CF20 20 in. Conductivity – 4 ft. Vertical Resolution - mmho
35. CF10 10 in. Conductivity – 4 ft. Vertical Resolution - mmho
36. CF6 06 in. Conductivity – 4 ft. Vertical Resolution - mmho
37. LMAN Left Mandrel - Used to represent tool in borehole diagram – in.
38. RMAN Right Mandrel - Used to represent tool in borehole diagram – in.
39. RSO Right Stand Off – Represents tool standoff graphically. – in.

Halliburton Energy Services
D00204472 Rev E ACRt Field Operations Manual 21
40. LSO Left Stand Off – Represents tool standoff graphically. – in.
Table 6 ACRtTM Results Mnemonics Cont’d
NO. Mnemonic Description
41. TMPF Feed Pipe Temperature Upper – 1 of 2 temperature sensors. Located under the fiberglass section of the receiver coils - deg F.
42. ECC Eccentricity – Used to define tools position in borehole. – in.
43. CDIA Calculated Diameter – Derived from inversion of radial measurements conductivity measurements.– in.
44. RT Rt -True Resistivity – Resistivity of the un-invaded zone – ohm-m
45. RXO Rxo - Flushed Zone Resistivity – ohm-m
46. RXRT Ratio of Rxo over Rt
47. DI Diameter of Investigation: Effective Diameter – in.
48. DIIN Inner Diameter of Investigation – Used to determine Rt and Rxo
49. DIOU Outer Diameter of Investigation – Used to determine Rt and Rxo
50. RMUD Mud Resistivity – ohm-m
Table 7 ACRtTM Input Mnemonics (I_ACRt)
NO. Mnemonic Description
1. F1R1 Frequency 1/Receiver 1: 12kHz / 80 Inch Real - mmho
2. F1X1 Frequency 1/Receiver 1: 12kHz / 80 Inch Imaginary - mmho
3. F1R2 Frequency 1/Receiver 2: 12kHz / 50 Inch Rea - mmho
4. F1X2 Frequency 1/Receiver 2: 12kHz / 50 Inch Imaginary - mmho
5. F1R3 Frequency 1/Receiver 3: 12kHz / 29 Inch Real - mmho
6. F1X3 Frequency 1/Receiver 3: 12kHz / 29 Inch Imaginary - mmho
7. F1R4 Frequency 1/Receiver 4: 12kHz / 17 Inch Real - mmho
8. F1X4 Frequency 1/Receiver 4: 12kHz / 17 Inch Imaginary - mmho
9. F1R5 Frequency 1/Receiver 5: 12kHz / 10 Inch Real - mmho
10. F1X5 Frequency 1/Receiver 5: 12kHz / 10 Inch Imaginary - mmho
11. F1R6 Frequency 1/Receiver 6: 12kHz / 6 Inch Real - mmho
12. F1X6 Frequency 1/Receiver 6: 12kHz / 6 Inch Imaginary - mmho
13. F2R1 Frequency 2/Receiver 1: 36kHz / 80 Inch Real - mmho
14. F2X1 Frequency 2/Receiver 1: 36kHz / 80 Inch Imaginary - mmho
15. F2R2 Frequency 2/Receiver 2: 36kHz / 50 Inch Real - mmho
16. F2X2 Frequency 2/Receiver 2: 36kHz / 50 Inch Imaginary - mmho
17. F2R3 Frequency 2/Receiver 3: 36kHz / 29 Inch Real - mmho

Halliburton Energy Services
22 ACRt Field Operations Manual D00204472 Rev E
18. F2X3 Frequency 2/Receiver 3: 36kHz / 29 Inch Imaginary - mmho
Table 8 ACRtTM Input Mnemonics Cont’d
NO. Mnemonic Description
19. F2R4 Frequency 2/Receiver 4: 36kHz / 17 Inch Real - mmho
20. F2X4 Frequency 2/Receiver 4: 36kHz / 17 Inch Imaginary - mmho
21. F2R5 Frequency 2/Receiver 5: 36kHz / 10 Inch Real - mmho
22. F2X5 Frequency 2/Receiver 5: 36kHz / 10 Inch Imaginary - mmho
23. F2R6 Frequency 2/Receiver 6: 36kHz / 6 Inch Real - mmho
24. F2X6 Frequency 2/Receiver 6: 36kHz / 6 Inch Imaginary - mmho
25. F3R1 Frequency 3/Receiver 1: 72kHz / 80 Inch Real - mmho
26. F3X1 Frequency 3/Receiver 1: 72kHz / 80 Inch Imaginary - mmho
27. F3R2 Frequency 3/Receiver 2: 72kHz / 50 Inch Real - mmho
28. F3X2 Frequency 3/Receiver 2: 72kHz / 50 Inch Imaginary - mmho
29. F3R3 Frequency 3/Receiver 3: 72kHz / 29 Inch Real - mmho
30. F3X3 Frequency 3/Receiver 3: 72kHz / 29 Inch Imaginary - mmho
31. F3R4 Frequency 3/Receiver 4: 72kHz / 17 Inch Real - mmho
32. F3X4 Frequency 3/Receiver 4: 72kHz / 17 Inch Imaginary - mmho
33. F3R5 Frequency 3/Receiver 5: 72kHz / 10 Inch Real - mmho
34. F3X5 Frequency 3/Receiver 5: 72kHz / 10 Inch Imaginary - mmho
35. F3R6 Frequency 3/Receiver 6: 72kHz / 6 Inch Real - mmho
36. F3X6 Frequency 3/Receiver 6: 72kHz / 6 Inch Imaginary - mmho
37. RMUD Mud Resistivity – ohm-m
38. F1RT 12 kHz Reference - Real
39. F1XT 12 kHz Reference - Imaginary
40. F2RT 36 kHz Reference - Real
41. F2XT 36 kHz Reference - Imaginary
42. F3RT 72 kHz Reference - Real
43. F3XT 72 kHz Reference - Imaginary
44. TFPU Temperature Upper Feedpipe (Fiberglass Section) – deg F
45. TFPL Temperature Lower Feedpipe (Ceramic Section) – deg F
46. ITMP Instrument Temperature – deg F
47. TCVA Temperature Correction Average
48. TUDV Upper Temperature Derivative
49. TLDV Lower Temperature Derivative

Halliburton Energy Services
D00204472 Rev E ACRt Field Operations Manual 23
Table 9 ACRtTM Telemetry Mnemonics (T_ACRt)
NO. Mnemonic Description
1. F1R1 Frequency 1/Receiver 1: 12kHz / 80 Inch Real - mmho
2. F1X1 Frequency 1/Receiver 1: 12kHz / 80 Inch Imaginary - mmho
3. F1R2 Frequency 1/Receiver 2: 12kHz / 50 Inch Rea - mmho
4. F1X2 Frequency 1/Receiver 2: 12kHz / 50 Inch Imaginary - mmho
5. F1R3 Frequency 1/Receiver 3: 12kHz / 29 Inch Real - mmho
6. F1X3 Frequency 1/Receiver 3: 12kHz / 29 Inch Imaginary - mmho
7. F1R4 Frequency 1/Receiver 4: 12kHz / 17 Inch Real - mmho
8. F1X4 Frequency 1/Receiver 4: 12kHz / 17 Inch Imaginary - mmho
9. F1R5 Frequency 1/Receiver 5: 12kHz / 10 Inch Real - mmho
10. F1X5 Frequency 1/Receiver 5: 12kHz / 10 Inch Imaginary - mmho
11. F1R6 Frequency 1/Receiver 6: 12kHz / 6 Inch Real - mmho
12. F1X6 Frequency 1/Receiver 6: 12kHz / 6 Inch Imaginary - mmho
13. F2R1 Frequency 2/Receiver 1: 36kHz / 80 Inch Real - mmho
14. F2X1 Frequency 2/Receiver 1: 36kHz / 80 Inch Imaginary - mmho
15. F2R2 Frequency 2/Receiver 2: 36kHz / 50 Inch Real - mmho
16. F2X2 Frequency 2/Receiver 2: 36kHz / 50 Inch Imaginary - mmho
17. F2R3 Frequency 2/Receiver 3: 36kHz / 29 Inch Real - mmho
18. F2X3 Frequency 2/Receiver 3: 36kHz / 29 Inch Imaginary - mmho
19. F2R4 Frequency 2/Receiver 4: 36kHz / 17 Inch Real - mmho
20. F2X4 Frequency 2/Receiver 4: 36kHz / 17 Inch Imaginary - mmho
21. F2R5 Frequency 2/Receiver 5: 36kHz / 10 Inch Real - mmho
22. F2X5 Frequency 2/Receiver 5: 36kHz / 10 Inch Imaginary - mmho
23. F2R6 Frequency 2/Receiver 6: 36kHz / 6 Inch Real - mmho
24. F2X6 Frequency 2/Receiver 6: 36kHz / 6 Inch Imaginary - mmho
25. F3R1 Frequency 3/Receiver 1: 72kHz / 80 Inch Real - mmho
26. F3X1 Frequency 3/Receiver 1: 72kHz / 80 Inch Imaginary - mmho
27. F3R2 Frequency 3/Receiver 2: 72kHz / 50 Inch Real - mmho
27. F3X2 Frequency 3/Receiver 2: 72kHz / 50 Inch Imaginary - mmho
29. F3R3 Frequency 3/Receiver 3: 72kHz / 29 Inch Real - mmho
30. F3X3 Frequency 3/Receiver 3: 72kHz / 29 Inch Imaginary - mmho
31. F3R4 Frequency 3/Receiver 4: 72kHz / 17 Inch Real - mmho
32. F3X4 Frequency 3/Receiver 4: 72kHz / 17 Inch Imaginary - mmho

Halliburton Energy Services
24 ACRt Field Operations Manual D00204472 Rev E
Table 10 ACRtTM Telemetry Mnemonics Cont’d
NO. Mnemonic Description
33. F3R5 Frequency 3/Receiver 5: 72kHz / 10 Inch Real - mmho
34. F3X5 Frequency 3/Receiver 5: 72kHz / 10 Inch Imaginary - mmho
35. F3R6 Frequency 3/Receiver 6: 72kHz / 6 Inch Real - mmho
36. F3X6 Frequency 3/Receiver 6: 72kHz / 6 Inch Imaginary - mmho
37. F1RT 12 kHz Reference - Real
38. F1XT 12 kHz Reference - Imaginary
39. F2RT 36 kHz Reference - Real
40. F2XT 36 kHz Reference - Imaginary
41. F3RT 72 kHz Reference - Real
42. F3XT 72 kHz Reference - Imaginary
43. IMUD Mud Cell Current
44. VMUD Mud Cell Voltage
45. STAT ACRtTM Status
46. RMUD Mud Resistivity – ohm-m
47. TFPU Temperature Upper Feedpipe (Fiberglass Section) – deg F
48. TFPL Temperature Lower Feedpipe (Ceramic Section) – deg F
49. ITMP Instrument Temperature – deg F
50. TCVA Temperature Correction Average
51. TUDV Upper Temperature Derivative
52. TLDV Lower Temperature Derivative
53. TIDV Instrument Temperature Derivative
54. TCHA Temperature Instrument Chassis – deg F
55. TRBD Temperature Receiver Board – deg F

Halliburton Energy Services
D00204472 Rev E ACRt Field Operations Manual 25
Theory of Operation
Nature of the Measurement
Laterolog measurements require survey current to flow into the formation, so a conductive medium must be present in the borehole. They cannot be run in boreholes containing air, gas or oil-based mud systems. In wells where a definitive Laterolog measurement cannot be made, an induction type tool must be utilized to determine the formation’s resistivity.
The ACRtTM is an induction device that uses electromagnetic principles to determine formation resistivity in boreholes containing fluids of low to medium conductivity, or in air drilled holes. Unlike a microguard or laterolog tool, the induction tool does not require current to flow from the tool to the formation, so a conductive liquid need not be present in the borehole when the tool is run. Induction tools, as well as laterolog tools, are designed to operate in formations containing saline waters.
In formations containing fresh (high resistivity) water, there can be insufficient contrast in formation resistivity to distinguish zones containing hydrocarbons from those containing water. To locate hydrocarbons in such formations, it is best to use a dielectric tool.
The ACRtTM may be used to:
• Determine resistivity of the un-invaded zone (Rt) • Distinguish between salt water bearing and hydrocarbon bearing formations • Define bed boundaries • Estimate invasion boundaries • Indicate movable hydrocarbons • Indicate permeable zones • Correlate formations • Perform accurate Mud Resistivity measurements (Rm) Figure 1 shows a diagram of how a simple induction tool operates. In this figure, the induction tool transmitter array induces an electrical current in the formation; the receiver array senses the electromagnetic field produced by this current. No current flows between the tool and the formation.

Halliburton Energy Services
26 ACRt Field Operations Manual D00204472 Rev E
Figure 1
Simple Induction Tool Diagram The ACRtTM tool contains one transmitter coil and an array of six receiver coils, which propagate and detect the electromagnetic fields. The transmitter coil is driven by a composite excitation current at three frequencies of approximately 12 kHz, 36 kHz and 72 kHz. The current passing through the transmitter coil generates an electromagnetic field, which induces electrical currents (eddy currents) in the formation. These eddy currents in turn generate their own electromagnetic fields, which induce a voltage, known as the “R-signal,” in the tool’s receiver coils. Another voltage, called the “X-signal,” is also induced in the receiver coils. That component results mainly from electromagnetic coupling between the transmitter and the receiver coils, but is affected by the formation as well.
The amplitude of the R-signal varies with changes in the formation resistivity and is used to determine that resistivity. The magnitude of the R-signal is reduced in low-resistivity formations (skin effect) and is affected by the proximity and resistivity of adjacent beds (shoulder bed affect).
The formation conductivity is measured in mS/m (milli-Siemens per meter) commonly called milli-mho (mmho). It is the reciprocal of the resistivity expressed in ohm-m. Given the resistivity R in ohm-m, the conductivity C in milli-mho would be calculated as:
C = 1000/R
The ACRtTM tool makes measurements of formation resistivity at six depths of investigation. The resistivity measurements are used together to adjust for invasion effects to obtain the true resistivity of the formation (Rt) and for calculating water saturation in uninvaded zones (Sw).

Halliburton Energy Services
D00204472 Rev E ACRt Field Operations Manual 27
Skin Effect Correction:
Skin effect makes the apparent conductivity value smaller than it should be and makes the response functions or geometric factors different from the ones derived under the Doll limit, causing severe non-linearity.
Figure 2
ACRtTM Response in Homogeneous Formation Figure 2 demonstrates the result of skin effect on the 80-inch array. The curve SEC is the ideal response. Skin effect is a function of three factors: the formation conductivity (σ ), the operating frequency ( f ) and the transmitter-receiver spacing ( L ). Figure 3 illustrates that skin effect varies with different operating frequencies.
Figure 3
ACRtTM Response in Homogeneous Formation 12KHz Frequency

Halliburton Energy Services
28 ACRt Field Operations Manual D00204472 Rev E
Figure 3 demonstrates the response of all of the sub-arrays in a homogenous formation at the 12 kHz frequency. This illustrates the fact that skin effect varies with transmitter-receiver spacing. The skin effect correction method utilized by the ACRtTM corrects for the skin effect in the aspect of apparent conductivity value and at the same time restores the geometric factor resulting in a two-dimensional correction. Figure 4 illustrates the results of the skin effect correction in a homogeneous formation.
Figure 4
ACRtTM Skin Effect Corrected Response in Homogeneous Formation

Halliburton Energy Services
D00204472 Rev E ACRt Field Operations Manual 29
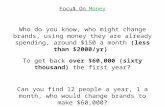
36 kHz Curves - Before Skin Effect Corection After Skin Effect Correction
F2R5
mmho per metre
1K 0
mmho per metre
DSE51K 0
F2R4
mmho per metre
1K 0mmho per metre
DSE41K 0
F2R3
mmho per metre
1K 0
mmho per metre
DSE31K 0
SP
millivolts
F2R2
mmho per metre
1K 0mmho per metre
DSE21K 0
Gamma API
api
0 150 F2R1
mmho per metre
1K 0mmho per metre
DSE11K 0
2100
Figure 5
ACRtTM Skin Effect Correction Log Example Figure 5 is a log example that illustrates the difference between the initial input data and the skin effect corrected data. The data shows the transition from permeable sandstone to less permeable shale. Notice that the initial data shows more separation in the shale zone than it does in the permeable sand. After the skin effect correction is applied, the sand appears to have more invasions and the conductivity is reading much higher. The SEC algorithm works by identifying differences between the frequencies for each sub-array. Large differences between the three operating frequencies of a particular sub-array indicate that the array is being influenced by skin effect. The algorithm works to mitigate this effect. As an example, the data from the three frequencies in a low conductivity zone should overlay one another, indicating minimal influence by skin effect. Looking at the data above, we know that the zone from 2120’ and below is shale. The zone is impermeable and the induction curves should stack, however, there is a fair amount of separation. That separation is due to Bore Hole effect. The next step will be to remove the contribution due to the borehole from the data.

Halliburton Energy Services
30 ACRt Field Operations Manual D00204472 Rev E
Bore Hole Correction
The measurements from the short spaced sub-arrays of an array induction tool contain significant borehole effects, which, if not properly corrected for, propagate through the array induction processing, resulting in false shallow-investigation logs. The purpose of borehole correction is to remove the borehole effect from the measurement.
The corrections applied to the array curves compensate for the effects of the well bore fluid and borehole geometry. The corrections are closely tied to the expected Geometric Factor for each array as seen below:
( )BH
BHmudaBHC G
G−
∗−=
1σσσ
Where BHCσ = Bore Hole Corrected conductivity. aσ = Apparent conductivity (measured conductivity before BHC). mudσ = Conductivity of the mud. BHG = Bore Hole Geometric Factor, a function of (caliper, eccentricity, mudσ & aσ ) The amount of the borehole effect is, besides the tool configuration, a function of the environment surrounding the tool. This is defined by the borehole geometry, the mud conductivity, the eccentricity of the tool inside the borehole and the formation conductivity. A perfect borehole correction can only be accomplished when all these environmental variables are known. The complexity of the borehole effect and the uncertainty of the environmental variables turn us to adaptive schemes to correct for the borehole effect.
Automatic Borehole Correction Algorithm: The Automatic Borehole Correction algorithm utilizes a multitude of inputs to yield a more accurate and repeatable radial profile. Previous generations of BHC relied on inputs from the caliper and mud resistivity (Rm) to help develop the radial profile for the tool. The adaptive algorithm uses those inputs as well as an inversion of the shallow arrays and mud cell to assist in determining the position of the tool in the well bore. The algorithm then uses comparative and iterative methods to determine the appropriate corrections to be applied based on known geometric factors stored in the form of a four dimensional matrix. The net result is a more robust radial profile with less dependency on data from the mud cell and caliper, which could introduce error into the output of the radial curves.
The use of a caliper with this tool is HIGHLY
RECOMMENDED. Logging without a caliper will significantly reduce the accuracy of the radial output curves.

Halliburton Energy Services
D00204472 Rev E ACRt Field Operations Manual 31
Error Introduction: The figure to the left demonstrates the typical position of the ACRtTM in an elongated borehole. In this situation, the tool caliper would more than likely read the longer axis of the borehole. This introduces error into the correction algorithm. The position of the tool in the well bore and therefore, the contribution of the borehole fluid to the signal is crucial in obtaining an accurate correction. The use of a single axis caliper does not accurately describe the borehole geometry and forces the software to use this value. Inversion of the sub-arrays yields a better description of the borehole geometry based on the expected response functions of the tool. This method yields more accurate results for the tool.
Figure 6 Automatic Borehole Correction Algorithm
Figure 7
Skin Effect Corrected ACRtTM Data

Halliburton Energy Services
32 ACRt Field Operations Manual D00204472 Rev E
Figure 7 shows a set of modeled ACRtTM data that has only had skin effect corrections applied. The formation modeled had the following criteria. Caliper: 10 inches. Rm: 0.2 ohm-m Rt: 20 ohm-m. Notice the large amount separation in the data, especially on the sub 6, which is the 6 inches array. Due to its shallow depth of investigation, the sub 6 is reading mostly borehole fluid.
Figure 8 shows the same data after borehole correction has been applied. Once the borehole effects have been removed, the sub-arrays begin to correlate.
Figure 8
Bore Hole Corrected ACRtTM Data In Figure 8 notice that the response of the deep sub-arrays (subs 1-3) has not changed much, indicating that the those arrays are less influenced by the signal coming from the bore hole region. The shallow arrays, however, change by a magnitude of 10 as the borehole correction process removes the effects of the borehole.

Halliburton Energy Services
D00204472 Rev E ACRt Field Operations Manual 33
After Skin Effect Correction After Bore Hole Correction
DSE5 11K 0
mmho per metre
DBH51K 0mmho per metre
DSE4 11K 0mmho per metre
DBH41K 0mmho per metre
DSE3 11K 0
mmho per metre
DBH31K 0mmho per metre
SP
millivolts
DSE2 11K 0mmho per metre
DBH21K 0mmho per metre
Gamma API
api
0 150 DSE1 11K 0mmho per metre
DBH11K 0
mmho per metre
2100
Figure 9
ACRtTM Skin Effect VS Borehole Corrections Log Example Figure 9 shows the difference between the skin effect corrected curves and the borehole corrected curves. With the effects produced by the high formation and high mud conductivities removed from the data, it becomes clear that the top zone is permeable sandstone and the bottom section impermeable shale. The next processing step will generate the radial curves that are displayed on the logs given to the customer.

Halliburton Energy Services
34 ACRt Field Operations Manual D00204472 Rev E
Software Focusing
Figure 10
ACRtTM Software Focusing Results
Parameters
There are two kinds of parameters associated with ACRt service which are needed by realtime logging processing algorithm.
• Wellbore condition parameters in “SHARED PARAMTERS”: Such as Bit Size, Mud, Total depth and temperature, etc..
• Tool position reference and temperature correction selection under “ACRt PARAMETERS”
The more in detail information of each parameter option will be explained in Section 3- Operation procedure.
Although the ACRtTM is capable of obtaining valid data without
a caliper, the use of a CALIPER with this tool is HIGHLY RECOMMENDED. In addition, the minimum or proper
STANDOFF has to be used accordingly with borehole size. Keep in mind that in its current format, INSITE software is incapable of mapping curves during re-logging operations, therefore, all calipers and ACRtTM data must be obtained
simultaneously.

Halliburton Energy Services
D00204472 Rev E ACRt Field Operations Manual 35
Section 2 – Safety
Danger to Personnel Refer to the Halliburton Management System (HMS) for the Logging and Perforating Service Delivery Linkage of Processes. The HMS processes can be found at the following link. http://halworld.halnet.com/WRK/WRKhms/wrkhms_content/processes/HES/HES_Logging/NetFiles/LP-GL-HES-LP-000.htm
General safety guidelines are also covered in publication 770.00356, Safety and Health Manual.
Detailed information on all associated HSE risks are provided as well as links to all safety related manuals.
Monthly and yearly inspection and labeling of the induction calibration fixture, stands, slings, poles, etc. has to be carried out and documented per NOMEM-352/OEB-2006/022 standards. Refer to Appendix C.
In addition, the safety procedure for ACRt calibration which is included in Section 4 - ACRt shop calibration has to be followed in detail.
Section
2

Halliburton Energy Services
36 ACRt Field Operations Manual D00204472 Rev E
Explosives
High Voltages
Heavy Equipment
Equipment Hazards
Notes, Cautions and Warnings All Notes, Cautions and Warnings appearing in this document convey the following:
Notes emphasize additional information that may be useful to
the reader.
Caution messages give directions that, if not observed could result in loss of data or in damage to equipment.
Warnings alert users to a specific procedure or
practice that, if not followed correctly, could cause personal injury or be a safety hazard.

Halliburton Energy Services
D00204472 Rev E ACRt Field Operations Manual 37
Section 3 – Operating Procedures
Introduction
INSITE Data Acquisition
This section shows the task flow for the Wireline Data Acquisition application that control the way INSITE applications communicate with the wireline data acquisition tools. See Figure 12 INSITE Data Acquisition Task Flow (Manage a data acquisition session) and Figure 13 LOGIQ Tool String Configuration.
The Wireline Data Acquisition application is used to configure, operate and monitor tools during data acquisition service sessions.
LOGIQ Wireline Tool Selection
The following section shows the task flow for the tool selection; the wireline tool selection is a part of the Data Acquisition. Complete service selection can be built using this application. In addition to building service with different tools, individual tool properties can be edited or new tools (passive tools, for example: spacer, flex joints etc.) can be created on the fly.
The LOGIQ Wireline tool selection is used to edit tool properties, create/edit/load service configuration, view service depth offset, view physical delay (tool joints), view/save/print tool diagram, generate/view service report, create/delete new serial number, view use of the serial number under a different service, and reposition the tool in the service setup.
Section
3

Halliburton Energy Services
38 ACRt Field Operations Manual D00204472 Rev E
Service Setup
This section describes systematically how to configure the toolstring service.
Tool Power Up
The following section explains the Power Panel Graphic User Interface (GUI) and describes systematically how to power-up the ACRtTM
Calibration Procedures
This section shows the task flow of the calibration process on the INSITE software and the gamma ray and accelerometer sensors shop, field and post calibrations required by the ACRtTM. See Figure 14.
Miscellaneous
The last two sections include transportation, handling and storage and wellsite operation (preparation, logging, post job and Log Quality control).

Halliburton Energy Services
D00204472 Rev E ACRt Field Operations Manual 39
Figure 11 INSITE Data Acquisition Task Flow - Manage a data acquisition session

Halliburton Energy Services
40 ACRt Field Operations Manual D00204472 Rev E
Figure 12 NSITE Toolstring Configuration Flow Chart

Halliburton Energy Services
D00204472 Rev E ACRt Field Operations Manual 41
Service Setup
1. In the desktop, double-click icon to get access to the WLI INSITE application.
2. In INSITE System Manager, click the icon and double-click on to select (Figure 14).
The Wireline Data Acquisition application controls the way
INSITE applications communicate with Wireline data acquisition tools.
Figure 13
Wireline INSITE Data Acquisition Start up Window

Halliburton Energy Services
42 ACRt Field Operations Manual D00204472 Rev E
3. The Data Acquisition - Initial Setup window will open where a Logging Service can be selected. Choose Select New Service.
Figure 14
Data Acquisition Initial Setup Window

Halliburton Energy Services
D00204472 Rev E ACRt Field Operations Manual 43
4. The Service Selection Window appears.
Figure 15
Service Selection Window
5. In the Service Selection panel, build the logging string including Depth Panel, Cable Head, GTET
and ACRtTM. Choose the correct SN from the WL LOGIQ tool listing. If the SN is not present, create one by clicking the New SN icon as show in Figure 18.

Halliburton Energy Services
44 ACRt Field Operations Manual D00204472 Rev E
Figure 16
Adding an ACRtTM Serial Number to the Service 6. Use the right panel under ALL TOOLS>WL INSITE expands the ACRtTM node and select the SN
created and drag and drop it in the toolstring window. 7. If the Serial Number is already in the database, it can be selected from the drop down menu that
appears when you click the ACRtTM serial number of the toolstring window as show in Figure 18.
Figure 17 Adding an ACRtTM Serial Number to the Service ACRtTM Node

Halliburton Energy Services
D00204472 Rev E ACRt Field Operations Manual 45
Figure 18 GTET – ACRtTM Service Tool String Setup

Halliburton Energy Services
46 ACRt Field Operations Manual D00204472 Rev E
8. Click Save (Figure 21 Save as Service) and then click the LOAD button of the toolstring window as shown in the Figure 22 below.
Figure 19
Save As Service
Figure 20
Loading the Service 9. The Service will be loaded and the Parameter Editor window will pop up. 10. Edit the parameter as required by the service to be run and close the Parameter Editor window.

Halliburton Energy Services
D00204472 Rev E ACRt Field Operations Manual 47
Figure 21
Parameter Window Editor 11. The Power Display GUI and the DAQ Tool initialization windows will open.
Figure 22
Power Display Graphical User Interface

Halliburton Energy Services
48 ACRt Field Operations Manual D00204472 Rev E
Figure 23
Data Acquisition Initialization Panel
12. The Depth Display should be green in the Initialization window indicating that DIMP Front-End panel is communicating. The , and status indicator will be red until power is applied. The , and will be green when power is applied and proper communication is established.
13. Before powering up, ensure the power supplies Front-End is communicating: the TX and RX lights
should be blinking and green in the Power Display GUI 14. In the AC1-Instrument power, enter about 207 volts in the Set field. The Power Supply window
indicates the voltage in the Output of the ELGAR. The Set window is the actual voltage applied to the wireline at surface (Slip ring) in W3 mode.
15. In the Current window, enter a current limit. This limit should be set as per the power requirement of the tool string to be logged; if GTET- ACRt are the only tools in the string, the limit should be set to 2.1 A.

Halliburton Energy Services
D00204472 Rev E ACRt Field Operations Manual 49
Figure 24
Powering up the GTET- ACRtTM
16. Click the Attach button to apply power to the tool string. The bigger font numbers in the respective panels will indicate the actual voltage and current. Check the Tool Bus voltage and make sure it falls in the green area about 200 V; adjust the surface voltage as necessary.
17. Once power is attached, the initialization handshake between the GTET- ACRtTM and the Surface modem is started and in about 30 seconds, the GTET- ACRt will have established communication. Monitor the status of tools in the DAQ Initialization window.

Halliburton Energy Services
50 ACRt Field Operations Manual D00204472 Rev E
Figure 25 GTET- ACRtTM Initialized Properly
18. Open the Tool Data Monitor (From main Menu bar: Data Tool Data Monitor) to fine-tune the Instrument voltage to 200 Volt DC.
19. Monitor sensors for proper values (Power supplies ±15v, ±5v, 3v…)
Figure 26 Data Acquisition
Figure 27
Alternative Method to Open the Tool Data Monitor

Halliburton Energy Services
D00204472 Rev E ACRt Field Operations Manual 51
Figure 28 Tool Data and Result Data Monitor Windows
20. On the INSITE Data Acquisition window, click the Data tab as in the Figure 30. The system will pop up another window where the raw ACRtTM Waveforms can be monitored.
21. Clicking on the ACRtTM Waveform option allows the operator to check the ACRtTM raw data input waveforms as shown on Figure 31.

Halliburton Energy Services
52 ACRt Field Operations Manual D00204472 Rev E
Figure 29
Data Acquisition ACRtTM Waveforms Window setup
Figure 30
ACRtTM Waveforms Window 22. Once the toolstring is powered up, the toolstring establish communications with the surface system,
the tool data (raw inputs) and result data monitor are OK, either proceed with the master calibration routine, tool check operation or continue with the logging job operation.

Halliburton Energy Services
D00204472 Rev E ACRt Field Operations Manual 53
ACRtTM Transportation and Handling The ACRtTM should be transported in two separated pieces, the ACRI-IA Instrument Section and the ACRS-IA Sonde Section. The joint between the Sonde and the Preamp is a shop joint and should never be broken and kept within transportation protection sleeve on location and/or for transportation.
The ACRtTM lifting / transportation sleeve like the HRAI-X / HRIT is recommended, refers to OEB_2008_068, it is because that Sonde fiberglass is a weak point of the tool. The external fiberglass will break or the internal mandrel will crack if the tool is picked up in one piece with the instrument or another piece of equipment on top of it.
http://halcape001.corp.halliburton.com/PublishedDocs/FieldNotification_OEB-2008_068_1.doc
Never pickup the ACRS Sonde section of the tool assembled with other sections, it will break or will be cracked internally or damage the tool at the place where the Preamp section joints
the fiberglass.
Fiberglass Sleeves The repair and/or replacement of the sonde fiberglass sleeve are specialized and costly. The thickness of the sleeve should be equal to or in slight of 1/4”. Check and inspect it periodically for wear and / or damage.
The fiberglass that surrounds the ACRt/HACRt sonde can cause irritation and discomfort when brought into direct contact with the human skin. Use gloves and long sleeves when handling the body of the sonde.
Pre-and Post-Job Inspection Always check the oil level of the sonde before and after every job. Follow the proper procedure when filling the tool.
Visually check the pins, o-rings and isolators for breakage and/or cuts.
Always check and replace the stand-off for wear or when it becomes excessive.
Wellsite Operations
Preparation • Check the oil level of the pressure balance system of the ACRS to ensure the tool is properly filled.
Follow up the Manufacturing Procedure Oil Fill ACRtTM document D00231830 • Inspect and check the conditions (worn or bent) of the SP electrode. Replace it following the
instruction procedures stated in the Service Manual 101382722 (D00237673) page 121 under Remove / Replace the SP Button.

Halliburton Energy Services
54 ACRt Field Operations Manual D00204472 Rev E
Although the ACRtTM is capable of obtaining valid data without
a caliper, the use of a caliper with this tool is HIGHLY RECOMMENDED. Keep in mind that in its current format, INSITE software is incapable of mapping curves during re-logging operations, therefore, all calipers and ACRtTM data
must be obtained simultaneously.
• The ACRtTM should be run with a 1.5” standoff. If the hole size is too small for a standoff, then the tool should be run slick.
• The ACRtTM should all means be run with a caliper tool. • The ACRtTM is a bottom tool. Therefore a hole finder, a bottom cabbage or bottom nose device
must be run at the bottom of the tool. • Rig up the SP surface electrode or fish well in advance of the operation to allow the electrode to be
become wet regardless if the tool will use the internal SP signal or it will come out form an external SP electrode. One of the most important things in running a SP is to have a good surface electrode return. The surface electrode should be buried and a shallow hole filled with mud from the mud pit or salty water. If the location ground is extremely dry, drive a metal rod in the ground to the moisture level, and make a good connection between the rod and the SP electrode. Keep the surface electrode from away from the rig and other sources of electrical noise. Make sure the SP line is in good condition. It must be fully isolated and in perfect continuity from the electrode to the connector on the line reel. NOTE: The SP and the MUD CELL Resistivity
• The ACRtTM is powered up with a GTET at 200 VDC and 200 Hz. Monitor the Tool Bus Nulling Icon on the Power Display Panel. It tends to kick or fluctuate slightly as the transmitter turns on when logging the tool in a high conductivity environment such the calibration resistor.
• The ACRtTM logging speed recommended is 100 ft/m (30m/m).
ACRtTM Limitations
Hole Sizes: The ACRtTM can be run in holes ranging in size from 4 ¾” to 12 ¼”. Accuracy varies with frequency and transmitter-receiver spacing. The ACRtTM should not be run in holes smaller that 4 ¾”.

Halliburton Energy Services
D00204472 Rev E ACRt Field Operations Manual 55
Temperature and Pressure: The ACRtTM is a typical tool rated to 350 deg F associated to the LOGIQ tool family. It can be run under 350 deg F for 10 hours with the tool power ON or 100 hours with the tool power OFF depending on formation resistivity and borehole conditions. The ACRtTM tool has a standard pressure rating of 20,000 PSI. Under all circumstances, it is critical that the oil level is correct in the pressure compensation section of the ACRtTM Sonde, temperature and or pressure will affect the response otherwise. The accuracy of the tool diminishes quickly if the Oil Level protocol is not followed properly.
Resistivity Measurements: The ACRtTM logging tool measures formation resistivity in a range of 0.2 to 1000 Ohms-m with good accuracy (+/-1mmho + 2% * formation conductivity). Since the ACRtTM works at different frequencies and has receiver arrays at different distances the accuracy varies from ±10 mS/m + 2%, 6 and 10” receivers, ±4 mS/m + 2%, 17” receiver and ±2 mS/m + 2% for the 12 KHz, ±2 mS/m + 2%, 6 and 10” receivers, ±1.5 mS/m + 2%, 17” receiver and ±1 mS/m + 2% for the 36 and 72 KHz.
Beyond the formation resistivity range the ACRtTM induction tool continues to respond to formation conductivity, but with diminished accuracy. As an Induction tool the ACRtTM is recommended for formation resistivity where the ratio of the formation resistivity versus mud resistivity is smaller than 1000.
Drilling Fluids and service selection: As known, induction tool is best capable for Oil Based Mud drilling fluid well. However, in reality, more and more induction services are required to run in operation. The ACRtTM tool as part of the Induction tool family is also a good choice to be run in holes that are drilled with OBM or Air Filled holes. In WBM drilling fluid well, the borehole effect is primary factor to be counter for shorter arrays response correction. The high salinity mud and bigger borehole, the higher bore hole effect. Generally, the ACRtTM result curves are real time borehole corrected properly by adaptive bore hole scheme. However, when the mud resistivity is smaller that 0.1 ohm-m or the ratio between Rt / Rm >> 1000, the Dual Laterolog Resistivity tool is the best choice. The ACRt/HACRt/HRAI job planner is valid in webpage and can help to determine either induction or laterlog is the best for the job borehole condition. Here is example of the planer chart which showing the normal ACRt Rt operation range at 1ft, 2ft and 4ft.
• If the operation guideline is within the left side of 1ft zone, ACRt is the preferred option. • If the operation guideline were of the 4ft right side, DLLT must be the choice. limit • If the operation guideline is between 1ft and 4ft, ACRt could be used for the job, but, the Rt
credibility need to be concerned. There is no published document regarding borehole salinity limitations on ACRtTM as off this moment. Be sure the tool is operated within the preferred operation are as shown in the following graphic. http://halworld.corp.halliburton.com/internal/PS/lp/contents/Ops/HESPSlog/hespslog_products/HRAI_JobPlanner_v15.xls

Halliburton Energy Services
56 ACRt Field Operations Manual D00204472 Rev E
ACRt Preferred Operation Area
The online ACRt_job planner is available at: ACRt_JobPlanner
Logging
Rig up and down
Cautions needs to be pay attention while rig up or down with ACRt tool. It is strong recommended with the ACRt tool in one piece and keeps sonde within lifting and transportation sleeve while rig up after pre-power on check, and rope guiding alone with the catwalk up to rig floor. Then remove the sleeve for tool string connection. In similar, the sleeve will be slide on after washing out the sonde when ACRt is out of bore hole on the floor prior to rig down.

Halliburton Energy Services
D00204472 Rev E ACRt Field Operations Manual 57
Tool power up and functional check
The ACRtTM is a tool without different tool modes so after the tool is assembled and hanging in the derrick it can be powered up – even in casing. 1. With the tool vertically in the derrick perform the following:
• Ensure the logging system is configured properly. (Refer to Section 3 Setup on the Operation Procedures Section Page 45).
• Power up the toolstring. Adjust the Power Display Panel increasing or decreasing the head
voltage until the Tool Bus Null Indicator is at zero. Wait until the Surface MODEM panel synchronizes with the toolstring downhole MODEM (GTET).
• A good exercise is to cycle the tool power up attaching and detaching the power to verify the
tool synchronizing and verify the surface system communication with the downhole toolstring.
• Monitor the GTET and ACRtTM tool response opening the tool data monitor window as in Figure 30 on page 40. Check for the Gamma counts, analogue, digital and instrument power, temperature sensor readings for the entire tools in the string. Then, open up the ACRtTM
Waveform and be sure the tool gives signals as show in the Figure 28 on page 41, and all the power, internal R_refs, temperature, etc... are in normal readings without any error message.
• Verify that the logging parameters are correct as per stated on FOM Section 1 page 34 Table 1-
7 ACRtTM Primary Parameters. 2. The ACRtTM can and should be logged while going down. The SP response should be monitored
and setup while RIH. However, it can be seen that the Down_Log SP does spiking sometimes. Always monitor the Tool Bus Null indicator when running tools in a hole, as the temperature of the string and line changes slightly. So, does the power consumption. As usual, the uplog functional check and casing check has to be done prior to keeping down log to TD.
• The present ACRtTM software version deconvolution routine will take 140 ft before the logs
prints out on the monitor or the camera.
After reaching the bottom of the logging interval, and depths correction are made, open the caliper tool and start logging either the repeat section log or the main section. Normally the ACRtTM logging speed can be between 60 to 100 ft/m, therefore the logging speed usually is not the limiting factor. Monitor either the repeat or the main section as per standard LQA procedures. Verify that the invasion profile matches the mud system and expected formation water resistivities. In most cases, the Induction is run in fresh mud where the shallowest reading shows the highest resistivity and the deepest reading exhibits the lowest resistivity.

Halliburton Energy Services
58 ACRt Field Operations Manual D00204472 Rev E
Logging Flash Table Parameter Editor ACRt Primary Parameters explanation
1. Shared parameters
• Bit Size (in): Insure that this parameter is correct as the BHC algorithm utilizes this parameter whether the caliper is available or not.
• Use Bit Size instead of Caliper for all the application: Default is “No” 1) With “No” in default, the caliper in the string will be used for ACRt_BHC correction. If there are more than one caliper in the service, use the Map_Inputs_Source to select the caliper. In general with triple comb, SDLT is the default caliper input.
2) If “Yes” is selected, BS will be used as caliper for the service which needs caliper for borehole correction. In fact, for ACRt services, in this case, BS is used as the initial point for caliper inversion of borehole correction, which is as same as downlog in default.
• Borehole Fluid Weight (ppg): input

Halliburton Energy Services
D00204472 Rev E ACRt Field Operations Manual 59
• Mud Resistivity (ohmm): The measured mud resistivity by survey meter in truck, it could be used for ACRt_BHC in case of Mud_Cell were failed.
• Temperature of Mud (F): The temperature of measured Mud sample. • Oil Based Mud System?: Default is “No”,
1) “No”, Water based Mud 2) “Yes”, Oil Based Mud
• Logging Interval is Cased?: Default is “No”, this option does not affect ACRt service. • AHV Casing OD (in): input • Surface Temperature (F): Local surface temperature which is used for Mud resistivity calculation
if Gradient is selected in Rmud_Source in ACRt option. • Total Well Depth (ft): input, in fact, the TVD will be used for Mud resistivity calculation if
Gradient is selected in Rmud_Source in ACRt option. • Bottom Hole Temperature (F): Measured Max bottom temperature will be used combing with
Surface_Temperature and TVD for Mud resistivity calculation if Gradient is selected in Rmud_Source in ACRt option.
2. ACRt parameters
• Process ACRt?: default is “Yes”.
1) “Yes”, normal ACRt processing routines will take place from I_ACRt, to R_ACRt_Debug to R_ACRt outputs.
2) “No”, only T_ACRt is recorded, none of I_ACRt or R_ACRt be done. • Minimum Tool Standoff (in): default is “1.5”
The input of the standoff’s size put on ACRt string, which is used by BHC for tool position inversion if “Free Hanging” is selected in ACRt_ToolPosition option.
• Temperature Correction Source: default is “ FP Lwr & FP Upr”

Halliburton Energy Services
60 ACRt Field Operations Manual D00204472 Rev E
1) “FP Lwr & FP Upr”: Both FeedPipe Lower and Upper temperature sensors will be used associating with their co-efficiency file for temperature correction.
2) “FP Lower only”: Only FeedPipe Lower temperature sensor will be used associating with its co-efficiency file for temperature correction.
3) “FP Upper only”: Only FeedPipe Upper temperature sensor will be used associating with its co-efficiency file for temperature correction.
• Tool Position: Default is “Free Hanging”
1) “Free Hanging”: Tool position is uncertain or unknown case in borehole. Tool position is
inversed by algorithm while logging process. 2) “Centered”: Assume that tool is always in center along with borehole. 3) “Eccentered”: Assume that tool is always decentered against wall along borehole.
• Rmud Source: default is “Mud Cell”
1) “Mud Cell”: Mud Cell measurement will be used for ACRt_BHC correction.

Halliburton Energy Services
D00204472 Rev E ACRt Field Operations Manual 61
2) “Gradient”: The Rmud will be calculated by surveyed Mud Resistivity and temperature gradient along with borehole, which will be used for ACRt_BHC.
3) “Inversion”: The Rmud will be inversed by borehole correction algorithm based on ACRt array inputs.
• Minimum Resistivity for MAP: The default is 0.2. It is the minimum resistivity value reference to be used for AMP presentation.
• Maximum Resistivity for MAP: The default is 2000. It is the maximum resistivity value
reference to be used for AMP presentation.
More options related ACRt operation under advanced option.
Standard Colors and Dash codes for INSITE Unless a client specifies distinct trace patterns, this is what is to be the default for the ACRt. These standards can be found in the Resistivity component for the ACRt 1_240. Remember; do not display the 6-inch radial curve.
TRACE STYLE WIDTH COLOR RT90 SOLID #3 BLUERT60 LONG DASH #3 RED BROWNRT30 LONG CHAIN #3 GREENRT20 DASH #3 MAGENTART10 SOLID #2 BLACK
ACRT Radial 1_240 Default Real Time Log Template
Recommended presentation Template of ACRT Radial, Rxo, RT and Res_Map, 1_240

Halliburton Energy Services
62 ACRt Field Operations Manual D00204472 Rev E
Repeatability Tool repeatability is affected by various borehole and environmental conditions including:
Hole Size, Washouts, Tool Stand-off, Mud Salinity, High Resistive Formations (>200 ohm-m), Mud Filtrate and Tool Motion.
Real Time Quality Control In logging mode the receiver signal contains the direct-coupled and formation-induced signal from each receiver, subsequently amplified by the preamplifiers. The transmitter current channel samples the output current of the transmitter via precision current-transformer. The phase-sensitive detection results are then sent to the surface. The real part of each data is prefixed with R_ while the imaginary part is prefixed with X_. Periodically, the tool performs an internal gain measurement, when the same reference signal is injected into the receiver inputs as well as the current measurement circuit. The results of the phase-sensitive detection of each signal are then sent to the surface. This internal gain data is used to compensate for any gain or phase differences (and changes thereof with time or temperature). ACRt surface system takes the down-hole signals as inputs and transforms them into well-site client deliverables. The main procedures are: Preprocessing and Advanced Processing.

Halliburton Energy Services
D00204472 Rev E ACRt Field Operations Manual 63
Preprocessing includes: The pre-processed data are written to the ADI database and are available for further processing and visualization.
• Sonde calibration application --- converts down-hole signals into apparent conductivities; • Stacking and sampling in depth and depth alignment; • Temperature correction --- compensating temperature drifts;
Advanced processing includes:
• Skin-effect correction --- removing skin effects, improving linearity; • Borehole correction --- removing borehole effects and reducing cave effects; • Software focusing --- combining sub-array measurements into client deliverable curves: 3 sets
of vertical resolution 1ft, 2ft and 4ft, each set consists of 5 curves of penetration depth 10in, 20in, 30in, 60in and 90in.
• Radial inversion --- solving for Rt, Rxo and invasion depths. The automatic method that is used in ACRt BHC process should be closely monitored. This is because automatic BHC can potentially over-estimate or under-estimate some parameters like borehole size and mud resistivity. Look closely to the caliper and mud resistivity. Usually, when the physical and inverted measurements differ substantially, that usually suggests a potential problem, e.g. either the physical measurement is wrong or the inverted parameter is wrong; or, other effects including shoulder effect, anisotropy effect and invasion effect might have been mistaken for borehole effect. Thermodynamic temperature correction method corrects temperature effects caused by the feed pipe temperature and by the radial temperature difference between the coil and the feed pipe. Look closely to the lower and upper feed pipe temperature sensors. If any of those sensors fails, there is not guaranty that the tool response is temperature corrected and is not a valid data (lower or upper array).

Halliburton Energy Services
64 ACRt Field Operations Manual D00204472 Rev E
This page left intentionally blank.

Halliburton Energy Services
D00204472 Rev E ACRt Field Operations Manual 65
Section 4 – Calibration
ACRtTM Calibration The ACRtTM employs three calibration processes:
• Precision Conductive Loop (Primary) • ‘R’ and ‘X’ signal calibrations (Secondary) • Transmitter current for casing detection (Wellsite Verifier) The primary and secondary calibrations are performed as shop calibration procedures. The standard induction calibration fixture has to be used and inspected annually per OEB/NOMEM as next: http://halcape001.corp.halliburton.com/PublishedDocs/FieldNotification_OEB-2006_022_1.doc: Upgrade and Standardization of the Induction Calibration Stand http://halcape001.corp.halliburton.com/PublishedDocs/FieldNotification_NOMEM352_1.doc : Induction Calibration Stand Testing and Inspection http://cwiprod.corp.halliburton.com/cwi/View.jsp?id=49212.31355.23878.65184 The safety procedures for ACRt calibration has to be followed during preparation, Loop On/Off and Free Air steps. There is none Wellsite Verifier calibration for this tool.
Shop Calibration
The ACRtTM should be calibrated on a monthly basis. The tool
should be recalibrated any time that a major repair is performed or a software change is implemented.
Section
4

Halliburton Energy Services
66 ACRt Field Operations Manual D00204472 Rev E
Calibration is not allowed to be done during Thunder, Rain, Windy or any severe weather conditions or
unusual RA area.
A full shop calibration of the ACRtTM requires three calibration steps:
1. Loop Off 2. Loop On 3. Free Space PM-1 periodic maintenance must be performed prior to a shop calibration. See the appropriate sections of this document for instructions.
Loop Off Calibration
In the Loop Off calibration, the calibration software will conduct various checks of the tool. During Loop Off calibration the tool is supported horizontally about five feet off of the ground. At remote sites or offshore, the tool may be hung vertically.
Loop On Calibration
During Loop On calibration an induction loop is passed over the Sonde area of the tool while the software collects data. In this mode, the tool is supported about five feet off of the ground. At remote sites or offshore, the tool may be hung vertically and swept using the Offshore Calibration Fixture.
Free Air Calibration
The Free Air calibration cycle is very similar to the Loop Off cycle, except that the tool is supported completely free of the ground. In the shop method it will be supported horizontally about 20 feet off of the ground. In the Offshore method, it will be supported vertically.

Halliburton Energy Services
D00204472 Rev E ACRt Field Operations Manual 67
Calibrations Procedures Flow Chart
Figure 31
Calibration Task Flow

Halliburton Energy Services
68 ACRt Field Operations Manual D00204472 Rev E
Figure 32
Recommended ACRtTM / HACRt Calibration Area

Halliburton Energy Services
D00204472 Rev E ACRt Field Operations Manual 69
Calibration Preparation The engineer has to look at the monthly and yearly inspection record of the induction tool calibration history book, and make sure that all the stands, poles, hoist, slings, etc. are valid and labeled correct. Otherwise, the ACRt tool calibration would not be allowed to take place. As usual, the similar pre-job preparation and calibration site inspection procedures should be following in order to ensure the ACRt calibration is successful. A pre-job safety meeting with the crew involved in the calibration procedure has to be done. Write a JSA including all hazards that can be found during the calibration. Make sure all personnel have full PPE equipment). Check all the equipment needed to perform the calibration:
• ACRt Sonde and Instrument • GTET • 12-pins LOGIQ Jumper at least 25 feet long. • Calibration Loop with Resistor attached (Check the continuity of the loop and that
resistor value is 0.417 ohm +/- 0.005 ohm) • Tag Lines • Tool Dollies (2) • C-Spanner wrench • Thermometer Sub (optional) • Cabbage Head (optional) • AC extension cord • Hoist • Caution tape and cones
The engineer leads the inspections per as checklist which should be documented along with the calibration report and filed together in the tool history folder.
• Inspect the surrounding area. Watch for obstacles on the way. • Inspect the post; look for cracks. • Inspect the Hoist line. • Inspect the Fiberglass calibration beam; check if it has all the slings, screws and nuts needed to
support the tool. • Inspect the slings, making sure they are not torn.
1. Validate that the calibration stands are in compliance with their yearly certification.
2. Insure that the monthly inspection of the stand is current.
3. Spool out enough cable from the logging unit and take the tools near the wooden post. Connect
the cable head to the GTET and Jumper the Telemetry to the ACRt using the long jumper. Refer to Figure 33.

Halliburton Energy Services
70 ACRt Field Operations Manual D00204472 Rev E
Figure 33
Tool string, ACRt calibration
4. Install the Thermometer sub (if it is available) and the Cabbage head to the ACRt to help avoid the sling sliding off of the tool while lifting. The thermometer sub is also a spacer to give more room for the tool to set on the post for safety and loop sweep. Refer to Figure 34.
Figure 34
Thermometer & Cabbage head connected

Halliburton Energy Services
D00204472 Rev E ACRt Field Operations Manual 71
5. Tie tag lines at the top of the ACRt instrument and Bottom of the ACRt sonde, using an oilfield knot to be able to help guide and balance the tool while lifting up and down for the Free Air step. Refer to Figure 35.
Figure 35 Tie the tag lines at top and bottom of ACRt
6. Install the Slings on the tool to support the tool in three sections: one at the top of the
Instrument, the second one at the top of the sonde and the third one at the bottom of the sonde. Refer to Figure 36.
Figure 36
Tool slings in correct position, ACRt calibration
7. Slowly start lifting the calibration beam with the hoist while making sure that the tool is balanced. Lift the tool at least two feet off the tool dolly to check balance and wait for 5 minutes to test the setup. The tag lines may be used at the beginning to equalize the tool after picking up. Refer to Figure 37.

Halliburton Energy Services
72 ACRt Field Operations Manual D00204472 Rev E
Figure 37
Keep tool balanced, ACRt calibration
8. Place the tool on the wooden post. Use the tag lines to guide the tool and make sure the operator at the hoist has a direct line-of-sight of the tool and all personnel.
9. The tool is now on the wooden post and ready to be calibrated. Do not forget to remove the
Tool dolly from the Calibration area. Follow the ACRt FOM guidelines to calibrate the tool.
Figure 38 ACRt on post stands ready for calibration
10. The Calibration beam could be left hanging in the air with a light tension supporting the tool
weight. (If for any reason the tool should slide or fall, the Beam is going to act as a backup to keep the tool from falling.)

Halliburton Energy Services
D00204472 Rev E ACRt Field Operations Manual 73
Calibration Steps Launch the INSITE System Manager program as shown in the following figures below.
Figure 39
INSITE System Manager Window Click on Data Acquisition icon and then click Select New Service from the Data Acquisition Initial Setup window.

Halliburton Energy Services
74 ACRt Field Operations Manual D00204472 Rev E
Figure 40
INSITE Data Acquisition – Initial Setup
Figure 41
INSITE Service Selections – Initial Setup
Click to load the new service

Halliburton Energy Services
D00204472 Rev E ACRt Field Operations Manual 75
Figure 42
INSITE Parameter Window Editor Close the Parameter Editor window and the system will pop up several windows as the Power Display and Data Acquisition Windows.
Figure 43 INSITE Data Acquisition Window
Power up the tool using the LOGIQ tool power up standard procedure.

Halliburton Energy Services
76 ACRt Field Operations Manual D00204472 Rev E
Figure 44
INSITE Data Acquisition Window
Figure 45
INSITE Events Log Window

Halliburton Energy Services
D00204472 Rev E ACRt Field Operations Manual 77
Verify that the Tool Initialization window has the green ACRtTM -IB Led ON and the associate clock hand is rotating.
Figure 46
INSITE DAQ Tool Initialization Windows

Halliburton Energy Services
78 ACRt Field Operations Manual D00204472 Rev E
Figure 47
Parameter Window Editor At the Data Acquisition Window click on the Configure tab and choose Tool Calibration.
Figure 48
INSITE Data Acquisition Window Calibration Configuration Option
The system will pop up the Tool Calibration Window Setup.

Halliburton Energy Services
D00204472 Rev E ACRt Field Operations Manual 79
Figure 49
INSITE Tool Calibration Window Setup
In the tool calibration window, click on the . The calibrate window setup will light on the
window allowing the user to be able to calibrate the tool.
Click on window. The system will pop up another window that shows the ACRtTM coefficients.
Figure 50 INSITE Tool Calibration Window setup coefficient options

Halliburton Energy Services
80 ACRt Field Operations Manual D00204472 Rev E
Figure 51
INSITE Tool Calibration Window Setup
Figure 52
INSITE Tool Calibration New Coefficient File loading setup

Halliburton Energy Services
D00204472 Rev E ACRt Field Operations Manual 81
Figure 53
INSITE Tool Calibration Window Setup
Figure 54
INSITE Tool Calibration Window Setup

Halliburton Energy Services
82 ACRt Field Operations Manual D00204472 Rev E
STEP #1: INSITE Tool Calibration Window 1 of 4 will be opened next.
Figure 55
INSITE Tool Calibration Window Setup IMPORTANT: Before starting the following steps, the tool must be communicating for at least 5 minutes to stabilize its electronics temperature. It is recommended that waiting for warming up 15~20 minutes before taking calibration data.
Press CALIRATE and the seconds count down from 60 to 0.
Figure 56
INSITE Tool Calibration Window Loop Off If step 1 is completed successfully, this message will be displayed. Refer to Figure 57.

Halliburton Energy Services
D00204472 Rev E ACRt Field Operations Manual 83
Figure 57
INSITE Tool Calibration Window Loop Off complete step Press NEXT to the advance to the second calibration step.
STEP #2 Windows 2 of 4 is opened
Figure 58
INSITE Tool Calibration Window Loop On slide step At the calibration area, place the Calibration Loop fixture on the lower end of the sonde and attach the load resistor. The loop is ready to be pulled with a rope by another person up to the upper end of the sonde in a constant speed during 60 seconds.

Halliburton Energy Services
84 ACRt Field Operations Manual D00204472 Rev E
Figure 59 INSITE Tool Calibration Window Loop On beginning step
In INSITE, simultaneously press CALIBRATE and sign to the other person to begin pulling the loop. The seconds will count down from 60 to 0.
If STEP 2 is completed successfully, this message will be displayed in refer Figure 60.
Figure 60
INSITE Tool Calibration Window Loop On complete step Press NEXT to the advance to the third calibration step.
STEP #3 Windows 3 of 4 in opened refer to Figure 61.

Halliburton Energy Services
D00204472 Rev E ACRt Field Operations Manual 85
Figure 61
INSITE Tool Calibration Window free Space Previous step
Figure 62
INSITE Tool Calibration Window Free Space step
12. The Calibration Loop is removed from the sonde and the tool is lifted 20 ft high refer to 63. and
don’t take free air data until the tool is stile. The Hoist operator must have a direct sight of the tool and personnel, Making sure the slings are still in the proper place and the other operators are handling the tag lines. Nobody is allowed to stand underneath the tool lifted at any time.

Halliburton Energy Services
86 ACRt Field Operations Manual D00204472 Rev E
Figure 63
INSITE Tool Calibration Window Setup In INSITE press CALIBRATE and the seconds will count down from 60 to 0.
If STEP 3 is completed successfully, this message will be displayed.
Figure 64
INSITE Tool Calibration Window Sonde error step

Halliburton Energy Services
D00204472 Rev E ACRt Field Operations Manual 87
Lower to tool back to its place on the 5’ wooden supports and add the central column.
Figure 65 INSITE Tool Calibration Window Setup
In INSITE press CALIBRATE and the seconds will count down from 10 to 0
If STEP 4 is completed successfully, this message will be displayed.
Figure 66
INSITE Tool Calibration Mud Cell step 4 Press NEXT to finish the calibration process.
The ACRtTM -COIL ARRAY SHOP CALIBRATION SUMMARY window will be opened.
Check the following to confirm good calibration results.

Halliburton Energy Services
88 ACRt Field Operations Manual D00204472 Rev E
The CALIBRATION SONDE TEMPERATURE should display a reasonable value.
Rotate the tool so the Mud Cell is up and fill the Mud Cell cavity with the .1 ohmmeter solution.
The Mud Cell reading in the TOOL DATA MONITOR should read between .092 and .108 Ohmmeter.
CALIBRATION SONDE TEMPERATURE: 38.6 Deg C
GAIN COEFFICIENT SUMMARY
R Gain Factor X Gain Factor Loop Phase (mmhos/volt) (mmhos/volt) (degrees)
Coil 12KHz 36KHz 72KHz 12KHz 36KHz 72KHz 12KHz 36KHz 72KHz
80" 0.9613 0.9573 0.9517 -0.0018 0.0037 0.0080 1.93 0.98 0.82 50" 0.9384 0.9363 0.936 -0.0008 0.0032 0.0053 1.92 0.77 0.33 29" 0.9368 0.9363 0.9386 -0.0048 0.0015 0.0036 1.81 0.64 0.10 17" 1.0096 1.0094 1.0123 -0.0050 -0.0004 -0.0013 1.86 0.82 0.40 10" 0.9955 0.9942 0.9955 0.0008 0.0017 0.0001 2.01 0.77 0.25 6" 1.0112 1.0104 1.0115 0.0008 0.0017 0.0004 2.01 0.75 0.20
SONDE ERROR SUMMARY
REAL 12 KHz REAL 36 KHz REAL 72 KHz mmhos) (mmhos) (mmhos)
Coil Offset Last Diff Offset Last Diff Offset Last Diff
80" -1.0 -1.0 0.0 -4.3 -4.3 -0.1 -5.5 -5.4 -0.1 50" -5.1 -5.1 0.0 -4.6 -4.6 0.0 -4.9 -4.9 0.0 29" -19.4 -19.4 -0.0 -5.8 -5.8 -0.0 -4.1 -4.1 -0.0 17" -99.9 -99.6 -0.3 -29.2 -29.2 -0.1 -24.5 -24.5 -0.1 10" -476.9 -479.3 2.4 -103.9 -104.6 0.7 -51.8 -52.2 0.4 6" 659.0 639.8 19.3 311.7 303.2 8.5 159.0 155.0 4.0
IMAG 12 KHz IMAG 36 KHz IMAG 72 KHz
(mmhos) (mmhos) (mmhos)
Coil Offset Last Diff Offset Last Diff Offset Last Diff
80" 113.9 111.7 2.2 -2.4 -2.4 -0.0 -71.0 -69.7 -1.4 50" 173.0 173.9 -0.9 22.4 22.6 -0.1 -48.6 -48.9 0.2 29" -59.9 -59.9 -0.0 -43.0 -42.9 -0.0 -63.9 -63.9 -0.0 17" -9.5 -9.4 -0.1 -16.5 -16.4 -0.1 -36.9 -36.8 -0.1 10" -486.7 -490.6 3.9 -58.2 -58.6 0.4 58.7 59.1 -0.4 6" -758.0 -739.9 -18.1 -163.2 -159.3 -3.8 337.6 328.3 9.3
MEASUREMENT SUMMARY
REAL 12 KHz REAL 36 KHz REAL 72 KHz
(mmhos) (mmhos) (mmhos) Coil Meas Cal Ratio Meas Cal Ratio Meas Cal Ratio
80" 1116 1138 1 365 372 1 114 116 1 50" 2387 2375 1 781 777 1 242 241 1 29" 4680 4681 1 1530 1530 1 476 476 1 17" 6434 6454 1 2104 2111 1 654 656 1 10" 5622 5581 1 1841 1827 1 573 568 1 6" 4010 4126 1 1313 1352 1 408 421 1
Applied Temperature Corrections
80 in 50 in 29 in 17 in 10 in 6 in.
Loop Off
Real
12K -0.183 -0.301 -0.404 -2.938 -9.730 -5.469 36K -0.125 -0.172 -0.193 -1.118 -2.766 -2.032 72K -0.014 -0.079 -0.068 -0.720 -1.602 -0.780

Halliburton Energy Services
D00204472 Rev E ACRt Field Operations Manual 89
Imag
12K -0.642 -0.784 -4.861 -1.732 -1.084 24.245 36K -0.363 -0.469 -1.628 -0.109 0.752 8.841 72K -0.533 -0.706 -0.929 -0.019 0.044 1.741
Freespace
Real
12K -0.184 -0.288 -0.425 -3.023 -10.034 -5.520 36K -0.131 -0.169 -0.201 -1.171 -2.855 -2.068 72K -0.032 -0.087 -0.079 -0.777 -1.650 -0.752
Imag
12K -0.634 -0.775 -4.854 -2.210 -1.907 19.600 36K -0.331 -0.421 -1.612 -0.271 0.532 7.420 72K -0.454 -0.597 -0.895 -0.101 -0.027 1.186
Applied Ground Effect Corrections
80 in. 50 in. 29 in. 17 in. 10 in. 6 in.
Real
12K 1.023 0.695 0.449 0.305 0.219 0.175 36K 0.701 0.491 0.330 0.236 0.178 0.149 72K 0.511 0.371 0.260 0.194 0.155 0.134
Imag
12K 0.407 0.257 0.149 0.087 0.050 0.031 36K 0.400 0.253 0.147 0.086 0.049 0.030 72K 0.354 0.225 0.130 0.075 0.041 0.025
Ground Conductivity 69.27
Figure 67 INSITE Tool Calibration Window Setup

Halliburton Energy Services
90 ACRt Field Operations Manual D00204472 Rev E
Clicking on REPORT the system will open this formal CALIBRATION REPORT. Figure 68 shows the HES Format and Figure 69 shows the Customer Format.
ARRAY COMPENSATED TRUE RESISTIVITY SHOP CALIBRATION
Tool Name: ACRt - 1098843 Reference Calibration Date: 27-Jun-07 11:48:22
Engineer: T. WYBLE Calibration Date: 27-Jun-07 12:06:05
Software Version: WL INSITE Development (Not for field use) (Build 1) Calibration Version: 1
GAIN COEFFICIENT SUMMARY
Subarray R Gain Factor X Gain Factor Loop Phase Error (deg)
12 KHz 36 KHz 72 KHz 12 KHz 36 KHz 72 KHz 12 KHz 36 KHz 72 KHz
A1 (80") 1.0032 1.0049 1.0063 -0.0023 0.0037 0.0077 1.9059 0.9659 0.7783
A2 (50") 1.0025 1.0030 1.0014 -0.0013 0.0043 0.0082 1.8956 0.8245 0.4695
A3 (29") 1.0039 1.0046 1.0053 -0.0062 0.0015 0.0053 1.7443 0.6318 0.1725
A4 (17") 0.9963 0.9951 0.9985 -0.0042 0.0035 0.0074 1.9058 1.0443 0.9010
A5 (10") 1.0084 1.0061 1.0072 -0.0003 0.0018 0.0015 1.9474 0.7758 0.3263
A6 (6") 0.9811 0.9811 0.9832 -0.0018 0.0013 0.0005 1.8618 0.7281 0.2064
SONDE OFFSET SUMMARY
Subarray R12KHz R36KHz R72KHz
SError (mmho/m)
Last SError (mmho/m)
Difference(mmho/m)
SError (mmho/m)
Last SError(mmho/m)
Difference(mmho/m)
SError (mmho/m)
Last SError(mmho/m)
Difference(mmho/m)
A1 (80") -3.069 -2.639 -0.430 -4.689 -4.726 0.037 -5.046 -5.252 0.206
A2 (50") -4.657 -4.456 -0.201 -4.204 -4.315 0.111 -4.392 -4.630 0.238
A3 (29") -18.135 -18.142 0.007 -4.356 -4.466 0.110 -3.018 -3.195 0.177
A4 (17") -119.806 -119.552 -0.254 -37.188 -37.664 0.476 -27.574 -27.991 0.417
A5 (10") -515.889 -504.381 -11.508 -109.314 -107.758 -1.556 -49.780 -49.358 -0.422
A6 (6") 678.005 676.445 1.560 313.069 312.471 0.598 154.962 155.417 -0.455
Subarray X12KHz X36KHz X72KHz
SError (mmho/m)
Last SError (mmho/m)
Difference(mmho/m)
SError (mmho/m)
Last SError(mmho/m)
Difference(mmho/m)
SError (mmho/m)
Last SError(mmho/m)
Difference(mmho/m)
A1 (80") 119.296 121.268 -1.972 0.652 0.802 -0.150 -67.352 -67.989 0.637
A2 (50") 129.661 128.594 1.067 8.533 7.585 0.948 -54.327 -55.865 1.538
A3 (29") 73.463 70.084 3.379 0.907 -0.459 1.366 -41.562 -42.723 1.161
A4 (17") 10.782 11.408 -0.626 -1.538 -2.069 0.531 -26.766 -27.865 1.099
A5 (10") -524.157 -516.392 -7.765 -57.228 -56.024 -1.204 58.039 58.819 -0.780
A6 (6") -998.050 -972.754 -25.296 -269.791 -256.063 -13.728 261.852 277.396 -15.544
Figure 68 INSITE Tool Calibration Report,
HES Format

Halliburton Energy Services
D00204472 Rev E ACRt Field Operations Manual 91
TYPICAL GAIN RANGE
Subarray R12KHz R36KHz R72KHz
Lower (mmho/m) Upper Lower (mmho/m) Upper Lower (mmho/m) Upper
A1 (80") 0.95 1.0032 1.05 0.95 1.0049 1.05 0.95 1.0063 1.05
A2 (50") 0.95 1.0025 1.05 0.95 1.0030 1.05 0.95 1.0014 1.05
A3 (29") 0.95 1.0039 1.05 0.95 1.0046 1.05 0.95 1.0053 1.05
A4 (17") 0.95 0.9963 1.05 0.95 0.9951 1.05 0.95 0.9985 1.05
A5 (10") N/A N/A N/A 0.95 1.0061 1.05 0.95 1.0072 1.05
A6 (6") N/A N/A N/A 0.95 0.9811 1.05 0.95 0.9832 1.05
GAIN HISTORIC CHECK
Subarray R12KHz (mmho/m)
R36KHz (mmho/m)
R72KHz (mmho/m)
Present Last Difference Tolerance Present Last Difference Tolerance Present Last Difference Tolerance
A1 (80") 1.0032 1.0113 -0.008 +/- 0.01 1.0049 1.0126 -0.008 +/- 0.01 1.0063 1.0147 -0.008 +/- 0.01
A2 (50") 1.0025 0.9973 0.005 +/- 0.01 1.0030 0.9979 0.005 +/- 0.01 1.0014 0.9965 0.005 +/- 0.01
A3 (29") 1.0039 0.9995 0.004 +/- 0.01 1.0046 0.9988 0.005 +/- 0.01 1.0053 0.9970 0.008 +/- 0.01
A4 (17") 0.9963 0.9930 0.003 +/- 0.01 0.9951 0.9914 0.004 +/- 0.01 0.9985 0.9949 0.004 +/- 0.01
A5 (10") 1.0084 0.9995 N/A N/A 1.0061 0.9985 0.007 +/- 0.01 1.0072 0.9980 0.009 +/- 0.01
A6 (6") 0.9811 0.9759 N/A N/A 0.9811 0.9752 0.006 +/- 0.01 0.9832 0.9772 0.006 +/- 0.01
TYPICAL PHASE RANGE
Subarray R12KHz R36KHz R72KHz
Lower (deg) Upper Lower (deg) Upper Lower (deg) Upper
A1 (80") 1.6 1.9059 2.2 0.5 0.9659 1.5 -0.6 0.7783 1.0
A2 (50") 1.6 1.8956 2.2 0.3 0.8245 1.2 -0.6 0.4695 0.6
A3 (29") 1.6 1.7443 2.2 0.3 0.6318 1.2 -0.6 0.1725 0.6
A4 (17") 1.6 1.9058 2.2 0.3 1.0443 1.2 -0.6 0.5901 0.6
A5 (10") N/A N/A N/A 0.3 0.7758 1.2 -0.6 0.3263 0.6
A6 (6") N/A N/A N/A 0.3 0.7281 1.2 -0.6 0.2064 0.6
Figure 69 INSITE Tool Calibration Report,
HES Format

Halliburton Energy Services
92 ACRt Field Operations Manual D00204472 Rev E
PHASE HISTORIC CHECK
Subarray R12KHz (deg)
R36KHz (deg)
R72KHz (deg)
Present Last Difference Tolerance Present Last Difference Tolerance Present Last Difference Tolerance
A1 (80") 1.9059 1.9020 0.004 +/- 0.25 0.9659 0.9537 0.012 +/- 0.10 0.7783 0.7846 -0.006 +/- 0.03
A2 (50") 1.8956 1.8794 0.016 +/- 0.25 0.8245 0.7935 0.031 +/- 0.10 0.4695 0.4605 0.009 +/- 0.03
A3 (29") 1.7443 1.7413 0.003 +/- 0.25 0.6318 0.6159 0.016 +/- 0.10 0.1725 0.1822 -0.010 +/- 0.03
A4 (17") 1.9058 1.8923 0.013 +/- 0.25 1.0443 1.0269 0.017 +/- 0.10 0.5901 0.5912 -0.011 +/- 0.03
A5 (10") 1.9474 1.9461 N/A N/A 0.7758 0.7612 0.015 +/- 0.10 0.3263 0.3328 -0.007 +/- 0.03
A6 (6") 1.8618 1.8676 N/A N/A 0.7281 0.7066 0.022 +/- 0.10 0.2064 0.2109 -0.005 +/- 0.03
TYPICAL SONDE OFFSET RANGE
Subarray R12KHz R36KHz R72KHz
Lower (mmho/m) Upper Lower (mmho/m) Upper Lower (mmho/m) Upper
A1 (80") -3 -2.938 -1 -6 -4.689 -2 -6 -5.046 -2
A2 (50") -6 -4.657 -2 -6 -4.204 -2 -6 -4.392 -2
A3 (29") -27 -18.135 -9 -9 -4.356 -3 -9 -3.018 -3
A4 (17") -180 -119.806 -60 -45 -37.188 -15 -39 -27.574 -13
A5 (10") N/A -515.889 N/A -150 -109.314 -50 -90 -49.780 -30
A6 (6") N/A 678.005 N/A 175 313.069 525 90 154.962 270
SONDE OFFSET HISTORIC CHECK
Subarray R12KHz (mmho/m)
R36KHz (mmho/m)
R72KHz (mmho/m)
Present Last Difference Tolerance Present Last Difference Tolerance Present Last Difference Tolerance
A1 (80") -3.069 -2.639 -0.430 +/- 1.0 -4.689 -4.726 0.037 +/- 1.0 -5.046 -5.252 0.206 +/- 1.0
A2 (50") -4.657 -4.456 -0.201 +/- 1.0 -4.204 -4.315 0.111 +/- 1.0 -4.392 -4.630 0.238 +/- 1.0
A3 (29") -18.135 -18.142 0.007 +/- 1.5 -4.356 -4.466 0.110 +/- 1.0 -3.018 -3.195 0.177 +/- 1.0
A4 (17") -119.806-
119.552
-0.254 +/- 3.5 -37.188 -37.664 0.476 +/- 1.6 -27.574 -27.991 0.417 +/- 1.6
A5 (10") -515.889-
504.381
N/A N/A -109.314 -107.758 -1.556 +/- 3.0 -49.780 -49.358 -0.422 +/- 2.5
A6 (6") 678.005 676.445 N/A N/A 313.069 312.471 0.598 +/- 8.0 154.962 155.417 -0.455 +/- 5.0
Figure 70 INSITE Tool Calibration Report,
HES Format

Halliburton Energy Services
D00204472 Rev E ACRt Field Operations Manual 93
TYPICAL BALANCE RANGE
Subarray R12KHz R36KHz R72KHz
Lower (mmho/m) Upper Lower (mmho/m) Upper Lower (mmho/m) Upper
A1 (80") 0 119.296 200 -10 0.652 10 -100 -67.352 0
A2 (50") 0 129.661 200 -15 8.533 15 -100 -54.327 0
A3 (29") 0 73.463 150 -30 0.907 10 -100 -41.562 40
A4 (17") -100 10.782 150 -20 -1.538 20 -100 -26.766 100
A5 (10") N/A -524.157 N/A -110 -57.228 110 -200 58.039 200
A6 (6") N/A -998.050 N/A -450 -269.791 450 -600 261.852 600
BALANCE HISTORIC CHECK
Subarray R12KHz (mmho/m)
R36KHz (mmho/m)
R72KHz (mmho/m)
Present Last Difference Tolerance Present Last Difference Tolerance Present Last Difference Tolerance
A1 (80") 119.296 121.268 -1.972 +/- 3.0 0.652 0.802 -0.150 +/- 1.5 -67.352 -67.989 0.637 +/- 3.0
A2 (50") 129.661 128.594 1.067 +/- 3.0 8.533 7.585 0.948 +/- 1.5 -54.327 -55.865 1.538 +/- 3.0
A3 (29") 73.463 71.084 2.379 +/- 3.0 0.907 -0.459 1.366 +/- 2.0 -41.562 -42.723 1.161 +/- 3.0
A4 (17") 10.782 11.408 -0.626 +/- 3.0 -1.538 -2.069 0.531 +/- 2.0 -26.766 -27.865 1.099 +/- 4.0
A5 (10") -524.157-
516.392
N/A N/A -57.228 -56.024 -1.204 +/- 3.5 58.039 58.819 -0.780 +/- 5.0
A6 (6") -998.050-
972.754
N/A N/A -269.791 -256.063 -13.728 +/- 10.0 261.852 277.396 -15.544 +/- 19.0
TRANSMITTER CURRENT GAIN (*) – Under Further Development R-MUD VERIFICATION
Signal Lower R Upper Lower X Upper Lower (ohm-m)
Measured(ohmm)
Upper (ohm-m)
12K 0.9 (*) 0.92211.4 (*) -.05 (*) 0.1877 0.0 (*) Mud Cell 0.95 0.998 1.05
36K 1.6 (*) 1.29542.4 (*) -0.3 (*) -0.6858 0.3 (*)
72K 1.7 (*) 1.43382.5 (*) -0.8 (*) 0.0264 -0.2 (*)
Figure 71 INSITE Tool Calibration Report,
HES Format

Halliburton Energy Services
94 ACRt Field Operations Manual D00204472 Rev E
Measurements
Measurement Value Units Sonde Temperature 114.59 degF
Instrument Temperature 101.47 degF
Ground Conductivity 98.24
Figure 72 INSITE Tool Calibration Report,
HES Format

Halliburton Energy Services
D00204472 Rev E ACRt Field Operations Manual 95
ARRAY COMPENSATED TRUE RESISTIVITY SHOP CALIBRATION
Tool Name: ACRt – 10918843 Reference Calibration Date: 27-Junc-07 17:20:17
Engineer: T.WYBLE Calibration Date: 27-Jun-07 17:27:26
Software Version: WL INSITE Development (Not for field use)(Build1) Calibration Version: 1
TYPICAL GAIN RANGE
Subarray R12KHz R36KHz R72KHz
Lower (mmho/m) Upper Lower (mmho/m) Upper Lower (mmho/m) Upper
A1 (80") 0.95 1.0032 1.05 0.95 1.0049 1.05 0.95 1.0063 1.05
A2 (50") 0.95 1.0025 1.05 0.95 1.0030 1.05 0.95 1.0014 1.05
A3 (29") 0.95 1.0039 1.05 0.95 1.0046 1.05 0.95 1.0053 1.05
A4 (17") 0.95 0.9963 1.05 0.95 0.9951 1.05 0.95 0.9985 1.05
A5 (10") N/A N/A N/A 0.95 1.0061 1.05 0.95 1.0072 1.05
A6 (6") N/A N/A N/A 0.95 0.9811 1.05 0.95 0.9832 1.05
TYPICAL SONDE OFFSET RANGE
Subarray R12KHz R36KHz R72KHz
Lower (mmho/m) Upper Lower (mmho/m) Upper Lower (mmho/m) Upper
A1 (80") -3 -2.938 -1 -6 -4.689 -2 -6 -5.046 -2
A2 (50") -6 -4.657 -2 -6 -4.204 -2 -6 -4.392 -2
A3 (29") -27 -18.135 -9 -9 -4.356 -3 -9 -3.018 -3
A4 (17") -180 -119.806 -60 -45 -37.188 -15 -39 -27.574 -13
A5 (10") N/A N/A N/A -150 -109.314 -50 -90 -49.780 -30
A6 (6") N/A N/A N/A 175 313.069 525 90 154.962 270
TRANSMITTER CURRENT GAIN
(*)-Under Further Development R-MUD VERIFICATION
Signal Lower R Upper Signal Lower (ohm-m)
Measured(ohmm)
Upper (ohm-m)
12K 0.9 (*) 0.8153 1.4 (*) Mud Cell 0.95 1.001 1.05
36K 1.6 (*) 1.1603 2.4 (*)
72K 1.7 (*) 1.5081 2.5 (*)
Figure 73 INSITE Tool Calibration Report,
Customer Format

Halliburton Energy Services
96 ACRt Field Operations Manual D00204472 Rev E
Once go through and review all the calibration values, and make sure each f that is within the tolerance, then, loaded the calibration to update the ACRt calibration. Meantime, it is always recommending to backup the calibration file once the successful calibration be accomplish.
Calibration and Survey Problems For survey problems refer to the troubleshooting guidelines in section X.X
Shop Calibration Problem
If the sonde error ER or Gain Factor of R and X are out of tolerance the first place to look is at the Phase column (P). Compare this phase reading t the previous calibration.
If all of the receiver readings are out of tolerance then, something is probably wrong in the calibration setup or procedure. Check the loop and the resistor on the loop. It is extremely important with the ACRtTM / HACRt to have absolute clean contacts for the resistor. Also, take off any metal parts like a watch, keyrings, etc when swiping the loop over the tool. Check the calibration area for possible problems. Cove the procedures again. Then perform the calibration again. If the problem persists in all of the receivers then it may be a problem with the tool.
If only one or two readings are out of tolerance, then again check the phase (P) column. Again check he calibration setup and procedure then try again. Be very careful to compare the actual readings and not the change because the changes should be minimal when doing two calibrations in sequence. If the problem persists it may be related to the receiver(s) that is/are out of tolerance.
As a recommendation at the end of the shop cal run a piece of log with the tool hanging in the air and plot the raw 12 KHz, 36 KHz and 72 KHz. Look for the reading stability as in the figures below.

Halliburton Energy Services
D00204472 Rev E ACRt Field Operations Manual 97
ACRT Comp Array Inputs - Time
ACRT Comp Array Inputs - Time

Halliburton Energy Services
98 ACRt Field Operations Manual D00204472 Rev E
This page left intentionally blank.

Halliburton Energy Services
D00204472 Rev E ACRt Field Operations Manual 99
Section 5 – Maintenance
Sonde General Properties The ACRtTM sonde is an induction sensor that transmits RF signals into the formation and receives returned RF signals generated by the formation’s induced eddy currents.
The RF signal is a complex waveform composed from three sine waves of 12, 36 and 72 kHz transmitted simultaneously from one transmitter coil. The induced signals from the six progressively spaced receiver coil pairs are amplified to allow resistivity measurement of different formation depths.
Figure 74 ACRtTM Sonde Tool
Section
5

Halliburton Energy Services
100 ACRt Field Operations Manual D00204472 Rev E
Additional sonde sensors include:
• Borehole mud resistivity • Spontaneous Potential (SP) Two antenna temperature positions
ACRtTM sonde physical characteristics include:
• O.D = 3.625" • Length = 15.5' • Sonde weight = 218 lb • Instrument section weight = 106 lb • Maximum pressure = 20,000 psi Maximum temperature = 350ºF
Use O-lube grease to lubricate all O-rings.
For Maintenance purposes, refers to the ACRt Service Manual 1015000000.

Halliburton Energy Services
D00204472 Rev E ACRt Field Operations Manual 101
ACRI-IA PM-1 Data Sheet SERIAL
NUMBER: PM1 PART NUMBER: 101298806
SHOP ORDER: ACRI/HRII - I w/ ISOLATED GROUNDS DWG NUMBER: D00098258
INSTRUCTION
SHEET: D00122911
DOC. REVISION: C
***** USE ONLY A SIMPSON 260/270 VOM FOR CHECKING THE TOOL ***** RED
LEAD BLACK LEAD (SET SELECTOR SWITCH TO + DC)
UPPER HEAD UPPER HEAD READING SCALE DATE DATE DATE
3 5 OPEN R X 10K 7 8 12K +/- 2KΩ R X 10K 8 7 600Ω +/- 50Ω R X 100 3 9 15K R X 10K
COAX INNER COAX OUTER 50 +/- 5Ω R X 1
UPPER HEAD HOUSING READING SCALE DATE DATE DATE
3 HOUSING OPEN R X 10K 5 HOUSING OPEN R X 10K 7 HOUSING OPEN R X 10K 8 HOUSING OPEN R X 10K 9 HOUSING OPEN R X 10K
LOWER HEAD HOUSING READING SCALE DATE DATE DATE
1 HOUSING OPEN R X 10K 2 HOUSING OPEN R X 10 K 3 HOUSING OPEN R X 10 K 4 HOUSING OPEN R X 10 K 5 HOUSING OPEN R X 10 K 6 HOUSING OPEN R X 10 K 7 HOUSING OPEN R X 10 K 8 HOUSING OPEN R X 10 K 9 HOUSING OPEN R X 10 K
10 HOUSING OPEN R X 10 K 11 HOUSING OPEN R X 10 K 12 HOUSING OPEN R X 10 K 13 HOUSING OPEN R X 10 K 14 HOUSING OPEN R X 10 K 15 HOUSING OPEN R X 10 K 16 HOUSING OPEN R X 10 K 17 HOUSING OPEN R X 10 K 18 HOUSING OPEN R X 10 K 19 HOUSING OPEN R X 10 K 20 HOUSING OPEN R X 10 K

Halliburton Energy Services
102 ACRt Field Operations Manual D00204472 Rev E
21 HOUSING OPEN R X 10 K 22 HOUSING OPEN R X 10 K 23 HOUSING OPEN R X 10K 24 HOUSING OPEN R X 10K 25 HOUSING OPEN R X 10K 26 HOUSING OPEN R X 10K 27 HOUSING OPEN R X 10K 28 HOUSING OPEN R X 10K 29 HOUSING OPEN R X 10K 30 HOUSING OPEN R X 10K 31 HOUSING OPEN R X 10K 32 HOUSING OPEN R X 10K 33 HOUSING OPEN R X 10K 34 HOUSING OPEN R X 10K 35 HOUSING OPEN R X 10K 36 HOUSING OPEN R X 10K 37 HOUSING OPEN R X 10K
* DIODE EFFECT
** SLOW CAP CHARGE TO VALUE SHOWN
COMMENTS:
I CERTIFY THAT ALL APPLICABLE PM1 PROCEDURE STEPS HAVE BEEN PERFORMED AND MEET ACCEPTED CRITERIA.
TECHNICIAN'S SIGNATURE: DATE:
TECHNICIAN'S SIGNATURE: DATE:
TECHNICIAN'S SIGNATURE: DATE:

Halliburton Energy Services
D00204472 Rev E ACRt Field Operations Manual 103
SERIAL NUMBER: PM1 PART NUMBER: 101392072
SHOP ORDER: ACRS-IA DWG NUMBER: D00170277
INSTRUCTION SHEET: D00221302
DOC. REVISION: C
***** USE ONLY A SIMPSON 260/270 VOM FOR CHECKING THE TOOL ***** RED
LEAD BLACK LEAD (SET SELECTOR SWITCH TO + DC)
UPPER HEAD TO HOUSING READING SCALE
READING AFTER
ASSEMBLY
READING AFTER
PRESSURE
READING AFTER
TESTWELL 1 4.2 ± .3Ω R X 1 2 *SCC 18KΩ ± 2K R X 10K 3 > 100KΩ R X 10K 4 *SCC 8KΩ ± 2K R X 10K 5 *SCC 12KΩ ± 2K R X 10K 6 OPEN R X 10K 7 OPEN R X 10K 8 < .2Ω R X 1 9 OPEN R X 10K 10 > 100KΩ R X 10K 11 > 100KΩ R X 10K 12 OPEN R X 10K 13 OPEN R X 10K 14 *SCC 25KΩ ± 3K R X 10K 15 *SCC 25KΩ ± 3K R X 10K 16 < .2Ω R X 1 17 < .2Ω R X 1 18 < .2Ω R X 1 19 < .2Ω R X 1 20 *SCC 25KΩ ± 3K R X 10K 21 OPEN R X 10K 22 < .2Ω R X 1 23 *SCC 16KΩ ± 2K R X 10K 24 < .2Ω R X 1 25 19K ± 2KΩ R X 10K 26 16K ± 2KΩ R X 10K 27 OPEN R X 10K 28 OPEN R X 10K 29 4.2 ± .3Ω R X 1 30 OPEN R X 10K 31 OPEN R X 10K 32 OPEN R X 1 33 *SCC 25KΩ ± 3K R X 10K 34 OPEN R X 10K 35 OPEN R X 10K 36 *SCC 25KΩ ± 3K R X 10K 37 *SCC 25KΩ ± 3K R X 10K
*SCC = Slight cap. charge

Halliburton Energy Services
104 ACRt Field Operations Manual D00204472 Rev E
UPPER HEAD TO UPPER HEAD READING SCALE
READING AFTER
ASSEMBLY
READING AFTER
PRESSURE
READING AFTER
TESTWELL
1 29 7.5 ± .5Ω R X 1 3 10 >100KΩ R X 10K 3 11 >100KΩ R X 10K 3 24 >100KΩ R X 10K 10 11 >100KΩ R X 10K 10 24 >100KΩ R X 10K 11 24 >100KΩ R X 10K
UPPER HEAD TO MUDCELL READING SCALE READING
AFTER ASSEMBLY
READING AFTER
PRESSURE
READING AFTER
TESTWELL
3 CENTER BUTTON <1 Ω R X 1
10 ELECTRRODE 1 < 1 Ω R X 1
11 ELECTRODE 2 < 1 Ω R X 1
24 OUTER RING < 1 Ω R X 1
MUDCELL TO HOUSING READING SCALE READING
AFTER ASSEMBLY
READING AFTER
PRESSURE
READING AFTER
TESTWELL CENTER BUTTON > 100KΩ R X 10K
ELECTRODE 1 > 100KΩ R X 10K ELECTRODE 2 > 100KΩ R X 10K
UPPER HEAD TO S.P. BUTTONS READING SCALE
READING AFTER
ASSEMBLY
READING AFTER
PRESSURE
READING AFTER
TESTWELL
9 <2 Ω R X 1
COMMENTS:
I CERTIFY THAT ALL APPLICABLE PM1 PROCEDURE STEPS HAVE BEEN PERFORMED AND MEET ACCEPTED
CRITERIA.
TECHNICIAN'S SIGNATURE: DATE:
TECHNICIAN'S SIGNATURE: DATE:
TECHNICIAN'S SIGNATURE: DATE:

Halliburton Energy Services
D00204472 Rev E ACRt Field Operations Manual 105
OUTER RING 24
D
ELECTRODE 1 10
A
ELECTRODE 2 11
C
CENTER BUTTON 3 B

Halliburton Energy Services
106 ACRt Field Operations Manual D00204472 Rev E
This page left intentionally blank.

Halliburton Energy Services
D00204472 Rev E ACRt Field Operations Manual 107
Section 6 – Reference Material
The attached documents are provided for REFERENCE ONLY. Check
Matrix for the most current revision level of these procedures and forms.
Manufacturing Calibration Procedures_D00218012
D00231830 Manufacturing Procedure Oil Fill, ACRtTM
D00237165 Procedure Oil Level Check, ACRtTM
ACRtTM Instrument Section PM Recording Tables
D00122911 Instruction Sheet PM1 HRII-I with Isolated Grounds
D00221302 Instruction Sheet PM1 ACRS–IA
D00231531 Procedure, Monthly Inspection, Induction calibration Stand
D00229028 INSTALLATION, INSPECTION, AND LOAD TESTING REQUIREMENTS, INDUCTION CALIBRATION STAND
SPE_101930 A New Asymmetrical Array Induction Logging Tool
SPWLA 38th Strange Invasion profile: What Multiarray induction logs can tell us about how Oil-Based Mud affects the invasion process and wellbore stability, 1997
SPWLA 40th Interpreting Multiarray induction logs in Difficult Environments, 1999
Section
6

Halliburton Energy Services
108 ACRt Field Operations Manual D00204472 Rev E
This page intentionally left blank.

Halliburton Energy Services
D00204472 Rev E ACRt Field Operations Manual 109
ACRtTM Instrument Section PM Recording Tables
DATE: ______________
INSTRUMENT S/N: ______________ SONDE S/N: ______________
Table 11 Ohm Check – Instrument Section – Top Connector – Pin-to-Pin
From To Reference Reading Scale Items Checked
Actual Measurement
3 5 C/E to Open R X 10K SP to Armor
7 8 20 kΩ ± 2 kΩ R X 10K Power Lines
8 7 500 ± 50 Ω R X 10K Power Lines
Coax + Coax – 50 ± 5 Ω R X 10K Ethernet
Table 12 Ohm Check – Instrument Section – Top Connector to Bottom Connector
From To Reference Reading Scale Items Checked
Actual Measurement
3 9 15 kΩ R X 10K SP Line
Table 13 Ohm Check – Instrument Section – Top Connector to Case
From To Reference Reading Scale Items Checked
Actual Measurement
1 Case Open R X 10K Spare 1
2 Case Open R X 10K Spare 2
3 Case Open R X 10K SP Electrode
4 Case Open R X 10K Spare 3
5 Case Open R X 10K Armor
6 Case Open R X 10K Spare 4
7 Case C/E to Open R X 10K Instrument Power
8 Case C/E to Open R X 10K Instrument Power
9 Case Open R X 10K Spare 5

Halliburton Energy Services
110 ACRt Field Operations Manual D00204472 Rev E
From To Reference Reading Scale Items Checked
Actual Measurement
10 Case Open R X 10K Spare 6
11 Case Open R X 10K Spare 7
12 Case Open R X 10K Spare 8
Coax + Case 1 MΩ+ R X 1 Ethernet+
Coax – Case 1 MΩ+ R X 1 Ethernet–
Table 14 Ohm Check – Instrument Section – Bottom Connector to Case
From To Reference Reading Scale Items Checked
Actual Measurement
1 Case Open/Open R X 10K +3F (Transmitter)
2 Case 8 kΩ/6 kΩ R X 10K Cal 0 (Receiver)
3 Case 8 kΩ/9 kΩ R X 10K + I Mud (Current)
4 Case 160 Ω/240 Ω R X 100 –5 VA
5 Case 240 Ω/160 Ω R X 100 +5 VA
6 Case 800 Ω/650 Ω R X 100 Temperature +
7 Case 250 Ω/250 Ω R X 1 Temperature –
8 Case <0.2 Ω R X 1 Analog Ground (Ground)
9 Case Open R X 10K SP In
10 Case 14 kΩ/10 kΩ R X 10K – V Mud (Voltage)
11 Case 8 kΩ/9 kΩ R X 10K + V Mud (Voltage)
12 Case 9 kΩ/10 kΩ R X 10K + Channel 4M V(RU78)
13 Case 90 Ω/ 3.5 Ω R X 1 +5 VD
14 Case 10 kΩ/10 kΩ R X 10K + Channel 1M V(RU42)
15 Case 10 kΩ/10 kΩ R X 10K + Channel 6S V(RU30)
16 Case 650 Ω/650 Ω R X 100 Receiver 2 Reference A
17 Case 650 Ω/650 Ω R X 100 Receiver 1 Reference A

Halliburton Energy Services
D00204472 Rev E ACRt Field Operations Manual 111
From To Reference Reading Scale Items Checked
Actual Measurement
18 Case 1 kΩ/1 kΩ R X 100 Receiver 2 Reference B
19 Case 1 kΩ/1kΩ R X 100 Receiver 1 Reference B
20 Case 3.5 kΩ/3.5 kΩ R X 100 + Channel 2M V(RU54)
21 Case 3.5 kΩ/3.5 kΩ R X 100 + Channel 3M V(RU64)
22 Case 1.1 kΩ/950 Ω R X 100 Sonde ID
23 Case 1.1 kΩ/950 Ω R X 100 ID SDA
24 Case 9.5 kΩ/9.5 kΩ R X 10K – I Mud (Current)
25 Case 8 kΩ/6 kΩ R X 10K Phase
26 Case 5 kΩ/5 kΩ R X 10K ID SDL
27 Case Open/Open R X 10K +2F Transmitter
28 Case Open/Open R X 10K –2F Transmitter
29 Case Open/Open R X 10K –3F Transmitter
30 Case 8 kΩ/8 kΩ R X 10K + Transmitter Reference
31 Case 8 kΩ/8 kΩ R X 10K – Transmitter Reference
32 Case <0.2 Ω R X 1 Digital Ground (Ground)
33 Case 10 kΩ/10 kΩ R X 10K + Channel 3S V(RL54)
34 Case 10 kΩ/10 kΩ R X 10K + Channel 2S V(RL69)
35 Case 10 kΩ/10 kΩ R X 10K + Channel 1S V(RL78)
36 Case 10 kΩ/10 kΩ R X 10K + Channel 4S V(RL42)
37 Case 10 kΩ/10 kΩ R X 10K + Channel 5S V(RL18)

Halliburton Energy Services
112 ACRt Field Operations Manual D00204472 Rev E
This document is provided here FOR REFERENCE ONLY. Check Matrix for the most current revision level of the ACRS-IA PM1 form.

Halliburton Energy Services
D00204472 Rev E ACRt Field Operations Manual 113

Halliburton Energy Services
114 ACRt Field Operations Manual D00204472 Rev E

Halliburton Energy Services
D00204472 Rev E ACRt Field Operations Manual 115
Appendix A – Calibration Theory General Information The error generated in the calibration stage of an induction tool directly propagates into the final induction measurements.
Here below is a description of a method for accurate calibration of an induction tool. The method stems from the rigorous formulation of the induction calibration. The accuracy depends on the compensation for the temperature effect, the earth ground effect and the suppressing of the random noise.
Also it describes a method for figuring out the earth ground conductivity and the earth ground effects, which requires no engineering calibration procedure change.
Calibration Concept and Complexities in Practice The induced voltage received by a receiver of an induction tool is amplified, digitized and processed through electronic circuits and firmware. The surface computer receives the number which misses its unit. This received number (signal) is then converted into apparent conductivity with a linear transformation:
offseta GS σσ −= * . (1)
Where, S is the received signal; G is a multiplier, called gain; offsetσ is an additive, called offset or sonde error. The calibration of an induction tool is to figure out the gain and the offset.
Because induction logging tools have very large response volumes, it is impossible to make equivalent artificial formation of known conductivity for the calibration purpose. Stemmed from the Doll induction theory, loop calibrators are normally used.
Appendix
A

Halliburton Energy Services
116 ACRt Field Operations Manual D00204472 Rev E
The loop calibration setup is shown schematically in Fig.1. The calibration is achieved through three steps: “loop-off” step, “loop-on” step and “air-hang” step. The gain G is calculated with the following equation;
offlooponloop
calibrator
SSG
__ −=
σ. (2)
Where, calibratorσ is the equivalent conductivity of the calibrator; onloopS _ and offloopS _ are the signals received at “loop-on” step and at “loop-off” step. The offset is calculated with equation bellow:
GS hangairoffset ⋅= _σ . (3)
Where, onloopS _ is the signal received at the “air-hang” step.
Applying the calibration concept to a real tool, we meet the following difficulties.
• Real tools are affected by temperature; • Hard to find perfect non-conductive environment for the “air-hang” step; • Received signal on the “loop-on” step is a function of the position of the calibrator; • Received signal subject to random noise. The methods to deal with these complexities directly relate to the accuracy of a real calibration practice.
Rigorous Formulation for Calibration Taking account of the temperature effect, a measured signal (S) is converted into apparent conductivity
( aσ ) by the following equation.
)()(* TTGS Trefsondea σσσ Δ−−= . (4)
Where, )( refsonde Tσ , called as “sonde error”, is the apparent conductivity portion from the tool body
when the temperature is Tref; TσΔ is the temperature effect which is a function of the temperature (T). Here, we assume that the temperature effect is zero when the tool temperature equals Tref, which is chosen 25oC.
Following Equation (4), we obtain the responses equations for the calibration steps. At “loop-off” step,
)()()( ___ offloopTrefsondeoffloopgroundoffloop TTHGS σσσ Δ++=⋅ . (5)

Halliburton Energy Services
D00204472 Rev E ACRt Field Operations Manual 117
Where, groundσ is the apparent conductivity portion from the Earth ground which is treated as a semi-infinite plane; Hloop_off is the height where the tool is positioned for “loop-off” step. The height is
commonly chosen 5ft above the ground as shown in Figure 1. )( _ offloopT TσΔ is the temperature effect
which is a function of the temperature of the “loop-off” step ( offloopT _ ). At “loop-on” step,
)()()( ___ onloopTrefsondeonloopgroundcalibratoronloop TTHGS σσσσ Δ+++=⋅ . (6)
Where, calibratorσ is the equivalent conductivity of the calibrator; )( _ onloopT TσΔ is the temperature effect
which is a function of the temperature of the “loop-on” step ( onloopT _ ); Hloop_on is the height where the tool is positioned for “loop-on” step, which is commonly chosen the same as for the “loop-off” step. At “air-hang” step,
)()()( ___ hangairTrefsondehangairgroundhangair TTHGS σσσ Δ++=⋅ . (7)
Where, Hair_hang is the height where the tool is positioned for the “air-hang” step, which is commonly chosen 20ft above the earth ground. Combining Equation (5) and (6), we obtain
offlooponloop
offloopTonloopToffloopgroundonloopgroundcalibrator
SSTTHH
G__
____ )]()([)]()([−
Δ−Δ+−+=
σσσσσ.
(8) When the temperature effect for the “loop-on” step equals that of the “loop-off” step and the heights are identical, Equation (8) reduces back to Equation (2). In other words, the pre-assumption for Equation (2) is that the temperature effects and the ground effects are the same for both the “loop-off” step and the “loop-on” step. This pre-assumption can be met by making sure
Hloop-on = Hloop-off, and Tloop-on = Tloop-off.
From Equation (7), we obtained the equation to calculate the sonde error.
)()()( ___ hangairThangairgroundhangairrefsonde THGST σσσ Δ−−⋅= . (9)
Properly evaluating the ground effect )( _ hangairground Hσ and temperature effect )( _ hangairT TσΔ
becomes the key for accurate sonde error )( refsonde Tσ . The evaluation of )( _ hangairT TσΔ will be discussed separately in the scope of temperature correction. Here, we next concentrate on the evaluation of the ground effect.

Halliburton Energy Services
118 ACRt Field Operations Manual D00204472 Rev E
Earth Ground Effect on Calibration A simple way to reduce the earth ground effect is to position the tool high above the earth ground for the “air-hang” calibration step. However, an engineering-practical height cannot meet the accuracy requirement of modern induction tools.
Extensive modeling has been conducted for deep understanding of the ground effect. Figure 2 presents earth ground effect along with height above the earth ground. Displayed in (2a), (2b) and (2c) are modeled earth ground effects for an array induction tool at frequencies of 12kHz, 36kHz and 72kHz respectively. The earth ground conductivity is chosen 143mMho/m, which is a typical value over many regions.
Figure 3 presents earth ground effect of different earth ground conductivities along with height. Displayed in (3a), (3b) and (3c) are modeled earth ground effects for an induction sub-array of 80in spacing at frequencies of 12kHz, 36kHz and 72kHz respectively.
In order to evaluate the earth ground effect, the earth ground conductivity need to be figured out first. Theoretically, it can be achieved by inversion with the experimental data. Numerical experiments, however, showed that a straight-forward method yield more reliable result.
From Equation (7) and (5), we come to the following formula to calculate the ground effect difference between the heights of the “loop-off” step and the “air-hang” step.
)]()([][
)]()([
____
__
hangairToffloopThangairoffloop
hangairgroundoffloopground
TTGSGS
HH
σσ
σσ
Δ−Δ−⋅−⋅=
− . (10)
The ground effect difference directly relates the earth ground conductivity. The relationship can be established through numerical modeling and stored as look-up tables. Figure 4 presents the look-up tables with plots. The relationship between the ground effect difference and the earth ground conductivity shown in figure (4a), (4b) and (4c) correspond to frequencies of 12kHz, 36kHz and 72kHz respectively. The heights here are chosen 5ft for the “loop-off” calibration step and 20ft for the “air-hang” calibration step. Because an array induction tool consists of several sub-arrays and operating with several frequencies, solving for the earth ground conductivity is an overall-determined problem even with the look-up tables. In order to obtain the most reliable ground conductivity, a weighting scheme is applied. The weights are chosen according to the steepness of the curves shown in Figure 4. The steepness is defined by the slope or the derivative of the corresponding curve. Once the earth ground conductivity is determined, the ground effects are calculated through numerical modeling. Figure 5 shows the modeled results, which can be also stored and used as look-up tables. Figure 6 schematically illustrates the method. After the ground effect obtained and temperature effect evaluated, Equation (9) is applied to calculate the sonde error.

Halliburton Energy Services
D00204472 Rev E ACRt Field Operations Manual 119
Suppressing Random Noise In the “loop-off” and “air-hang” calibration steps, the induction signal can be recorded over a period of time and then stacked to reduce random noise. In the “loop-on” step, the induction signals are recorded while calibrator is sweeping over the tool through all sub-arrays. The peak readings are obtained through searching the recorded signals and used to in the gain calculation with Equation (8). Because the tool takes sample with a time interval of a small fraction of a second (for example 50 msec), the peak readings should not be missed, as long as the calibrator is not sweeping extremely fast over the tool. However, the random noise and RF noise picked up by the tool can produce an error of up to several mMho/m. Two methods are proposed to reduce this type of noise. (1) Stationary loop-on – putting the calibrator on the peak position, which is figured or calculated (Table 1) out and marked on the tool before hand, let the tool recording the induction signals over a period of time for stacking. Figure 7 shows the possible error due to possible miss-place of the calibration loop when the stationary calibration procedure is used. This figure tells the stationary calibration procedure is practical. (2) Constant calibrator sweeping – using a mechanical method to sweep the calibrator over the tool with a constant speed and fitting the recordings to the theoretical profile, which can be calculated before hand. Summary The error generated in the calibration stage of an induction tool directly propagates into the final induction measurements. The information disclosed is a method for accurate calibration of an induction tool. The method stems from the rigorous formulation of the induction calibration. The accuracy depends on the compensation for the temperature effect, the earth ground effect and the suppressing of the random noise. Also disclosed is a method for figuring out the earth ground conductivity and the earth ground effects, which requires no engineering calibration procedure change. The method determines the earth ground conductivity and then the ground effects. The induction measurement difference between the “loop-off” step and the “air-hang” step is used as inputs to solve for the earth ground conductivity. The earth ground conductivity is in return used as the input for calculating the ground effects. The method also applies to calibrations in which the tools are positioned vertically.

Halliburton Energy Services
120 ACRt Field Operations Manual D00204472 Rev E
Table 15 ACRtTM / HACRt peak positions and readings of calibration loop sweeping.
Peak Position (in)
R_12kHz (mS/m)
X_12kHz (mS/m)
R_36kHz (mS/m)
X_36kHz (mS/m)
R_72kHz (mS/m)
X_72kHz (mS/m)
80” 76.701 1138 -680 374 -657 118 -403 50” 46.635 2378 -1420 780 -1371 245 -840 29” 23.718 4698 -2805 1538 -2703 482 -1654 17” 11.102 6536 -3900 2131 -3729 666 -2281 10” 5.903 5895 -3485 1888 -3225 590 -1965 6” 3.655 4047 -2387 1328 -2370 409 -1457

Halliburton Energy Services
D00204472 Rev E ACRt Field Operations Manual 121
a) “Loop Off”
b) “Loop On”
c) “air-hang”
Figure 75 Schematic of typical calibration steps: (a) “loop-off” step; (b) “loop-on” step; (c) “air-hang” step.
Array Induction Tool
Nonconductive Supporters
Array Induction Tool
Nonconductive Supporters
5ft5 ft
Array Induction Tool
Nonconductive Supporters
Loop CalibratorArray
Induction Tool
Nonconductive Supporters
Loop Calibrator
5 ft5 ft
A r r a y I n d u c t i o n T o o l
N o n c o n d u c t i v e S u p p o r t e r s
A r r a y I n d u c t i o n T o o l
N o n c o n d u c t i v e S u p p o r t e r s
2 0 f t2 0 f t

Halliburton Energy Services
122 ACRt Field Operations Manual D00204472 Rev E
Earth ground effect for sub-arrays of different spacing along with height. Displayed in (2a), (2b) and (2c) are modeled earth ground effects for an array induction tool at frequencies of 12kHz, 36kHz and 72kHz respectively. The earth ground conductivity is chosen 143mMho/m.
Figure 76
68a

Halliburton Energy Services
D00204472 Rev E ACRt Field Operations Manual 123
Figure 77
68b

Halliburton Energy Services
124 ACRt Field Operations Manual D00204472 Rev E
Figure 78
68c
Earth ground effect of different earth ground conductivities along with height. Displayed in (3a), (3b) and (3c) are modeled earth ground effects for an induction sub-array of 80in spacing at frequencies of 12kHz, 36kHz and 72kHz respectively.

Halliburton Energy Services
D00204472 Rev E ACRt Field Operations Manual 125
Figure 79
71a

Halliburton Energy Services
126 ACRt Field Operations Manual D00204472 Rev E
Figure 80
71b
Figure 81
71c

Halliburton Energy Services
D00204472 Rev E ACRt Field Operations Manual 127
The relationship between the ground effect difference and the earth ground conductivity. (4a), (4b) and (4c) correspond to frequencies of 12kHz, 36kHz and 72kHz respectively. The heights here are chosen 5ft for the “loop-off” step and 20ft for the “air-hang” step.
Figure 82
74a

Halliburton Energy Services
128 ACRt Field Operations Manual D00204472 Rev E
Figure 83
74b
Figure 84
74c

Halliburton Energy Services
D00204472 Rev E ACRt Field Operations Manual 129
Earth ground effect at 20ft height along with earth ground conductivity. (5a), (5b) and (5c) correspond to frequencies of 12kHz, 36kHz and 72kHz respectively.
Figure 85 77a

Halliburton Energy Services
130 ACRt Field Operations Manual D00204472 Rev E
Figure 5b
Figure 5c

Halliburton Energy Services
D00204472 Rev E ACRt Field Operations Manual 131
Figure 6 – illustration of the process for estimating the earth ground effects on air-hang calibration.
Figure 7 – the possible error due to possible misplace of the calibration loop when the stationary calibration procedure is used, showing that the stationary calibration procedure is practical.

Halliburton Energy Services
132 ACRt Field Operations Manual D00204472 Rev E
This page left intentionally blank.

Halliburton Energy Services
D00204472 Rev E ACRt Field Operations Manual 133
Appendix B – A Novel Borehole Correction
The array induction measurements from the short-spacing sub-arrays contain significant borehole effects, which, if are not properly corrected for, can propagate through the array induction processing, resulting in false shallow-investigation logs. A perfect borehole correction for an array induction measurement can be accomplished only when the environment surrounding the tool is fully known. The environment is basically defined by the borehole size, the mud conductivity, the formation conductivity and the tool eccentricity, named environmental variables. The borehole size and the mud conductivity may be available from external measurements with various confidence levels. The eccentricity and the formation conductivity, however, need to be figured out from the induction measurements. An adaptive borehole correction method conducts the borehole correction regardless of the availability of the external measurements of the mud conductivity and the borehole size. The key to an adaptive borehole correction, therefore, is to figure out the four environmental variables from the induction measurements. In 1991 Schlumberger developed an adaptive borehole correction method. However, that method has two major shortcomings. (a) The least-square inversion method used to solve for the four environmental variables are prone to local minimums, poor resolvability of the borehole size and the eccentricity, and poor convergence. (b) The method requires complex ways to fit the huge amount of pre-calculated forward modeling data to achieve a reliable pseudo forward computation. New insight into the borehole effect and its correction leads us to a novel adaptive borehole correction method and system, which is based on a data library of borehole geometrical factors, features with a pattern matching method, and eventually much more reliably and efficiently solves for the environmental variables to achieve an optimized borehole correction.
Section
B

Halliburton Energy Services
134 ACRt Field Operations Manual D00204472 Rev E
The adaptive borehole correction system has been implemented and applied to our array induction tool ACRT. It has been tested with modeled data and field data.
Introduction The measurements from short-spacing sub-arrays of an array induction tool contain significant borehole effect which, if are not properly corrected for, propagate through the array induction processing, resulting in false shallow-investigation logs. The borehole correction is to remove the borehole effect from the measurement. The amount of the borehole effect is, besides the tool configuration, a function of the borehole and formation environment surrounding the tool defined the borehole size, the mud conductivity, the eccentricity of the tool inside the borehole, the formation conductivity, which are referred to as the “four environmental variables” in this context. A perfect borehole correction can only be accomplished when all these environmental variables are known. Though the borehole size and the mud conductivity can be measured with a caliper device and a mud sensor, the accuracy of those measurements is not always good enough. Besides, the eccentricity and the formation conductivity normally are not exactly known. The complexity of the borehole effect and the uncertainty of the environmental variables turn us to adaptive schemes to correct for the borehole effect. An adaptive borehole correction scheme utilizes known ones of the environmental variables, inverts for the unknown ones from the induction measurements and eventually achieves the best possible borehole correction. Minerbo et al. in 1991 (US 5041975) developed such a scheme. It is based on an inversion algorithm with a pseudo forward modeling computation. The pseudo forward modeling is accomplished by fitting the model calculations to closed form mathematical expressions. The inversion algorithm matches the measured data from the shortest-spacing arrays to the model calculations to solve for the four environmental variables. The borehole correction is then implemented with those inverted environmental variables. There are, however, two major disadvantages of that scheme. Firstly its inversion algorithm is prone to the typical non-uniqueness or local minimum. In other words, different initial guess of the variables may lead to different inversion solution to the variables. Secondly, the method requires a very complex method to accomplish its pseudo forward modeling.
Borehole Correction for Array Induction Measurements Assuming a homogeneous formation of conductivity tσ penetrated by a borehole of conductivity mudσ , the borehole correction of a response of an induction tool ( aσ ) is implemented by the following equation:
),,,(1),,,(
tmudbh
tmudbhmudabhc caleccG
caleccGσσ
σσσσσ
−×−
= . (1)
Where, bhcσ is the borehole-corrected measurement; Gbh is the borehole geometrical factor which is a function of the four environmental variables: the borehole size (cal), the mud conductivity ( mudσ ), the

Halliburton Energy Services
D00204472 Rev E ACRt Field Operations Manual 135
tool eccentricity (ecc) and the formation conductivity ( tσ ). Figure 1 shows a set of typical borehole geometrical factors along with the borehole size. Though the borehole size and the mud conductivity can be measured with a caliper device and a mud sensor, the accuracy of those measurements is not always good enough. The formation conductivity can be roughly estimated from deeper array measurements, but the tool eccentricity is always unknown. The key to the adaptive borehole correction of an array induction tool is to figure out the four environmental variables. With array induction tool, multiple array measurements are acquired with depth of investigation varying from several inches to around one hundred inches. The shallow ones contain large borehole signal, while the deep ones contains only small amount of borehole signal. This variation of borehole signal content in the measurements of an array induction tool allows for a solution to the four environment variables.
Data Library of Borehole Geometrical Factors A skin-effect corrected induction measurement often behaves in quasi linearity. The following equation is widely used without significant error to express the skin-effect corrected induction measurement ( aσ ) in a homogeneous formation penetrated by a borehole.
ttmudbhmudtmudbha caleccGcaleccG σσσσσσσ ×−+×= )],,,(1[),,,( . (2) This equation implies: (A) The primary dependence of the induction measurement ( aσ ) on the mud conductivity ( mudσ ) and
the formation conductivity ( tσ ) is the explicit multiplication relation; (B) The nonlinearity primarily comes from the non-explicit dependence of the borehole geometrical
factor on the four environmental variables. With a pre-calculated data library of the borehole geometrical factors, Equation (2) can be used as the forward modeling computation for the inversion of the environmental variables and for the borehole correction presented by Equation (1). The data library of the borehole geometrical factors contains four discrete dimensions corresponding to the four environmental variables. Because the borehole geometrical factor does not bear the primary dependence of the induction measurement ( aσ ) on the mud conductivity ( mudσ ) and the formation conductivity ( tσ ), the discrete points can be sparse along the dimensions of the mud conductivity and the formation conductivity, resulting in a relatively small data library of the borehole geometrical factor. With this small data library, it is not necessary to fit the data to closed form mathematical expressions.
Enhancement of Sensitivity to Geometry Variables Among the four environmental variables, the mud conductivity and formation conductivity, referred to as conductivity variables in this context, define the electrical property of the environment surrounding

Halliburton Energy Services
136 ACRt Field Operations Manual D00204472 Rev E
the tool in conductivity unit, while, the borehole size and the tool eccentricity, referred to as geometry variables in this context, define the geometry of the environment surrounding the tool in length unit. These geometry variables indirectly relate to the raw induction measurements, showing lower resolvability than the conductivity variables in a simultaneous inversion. Mixing these two types of variables in the simultaneous inversion often causes local minimums, increased computation time and slow convergence. Apparently, the geometry variables are more contained in the trend formed by the induction measurements of different transmitter-receiver spacings than in the absolute amplitude of those measurements. In addition, unlike the induction measurements, the borehole geometrical factors are primarily determined by the geometry variables. In order to enhance the sensitivity of the induction measurements to the geometry variables, a transformation is introduced as
tmud
ia
iai
σσσσ
δ−
−=
+1
. (3)
Where, the superscript i denotes the ith subarray of an array induction tool. The whole set of array induction measurements is expressed by aΩ , with m denoting the total number of subarrays of the array induction tool:
,,, 21 maaaa σσσ L∈Ω . (4)
The set of new quantities created from the transformation is expressed by Ψ and are referred to as “pattern measurements:”
,,, 121 −∈Ψ mδδδ L . (5) Using Equation (2), Equation (3) is further derived into
1+−= ibh
ibh
i GGδ . (6) Because i
bhG and 1+ibhG primarily depend on the geometry variables, the pattern measurement ( iδ ),
therefore, primarily depends on the geometry variables: the borehole size (cal) and the eccentricity (ecc). Therefore, the transformation suppresses the sensitivity to the mud conductivity ( mudσ ) and the formation conductivity ( tσ ), while, the sensitivity to the eccentricity (ecc) and the borehole size (cal) is enhanced.
Solving for Environmental Variables With estimated mud conductivity ( mudeσ ) and estimated formation conductivity ( teσ ), the pattern measurement ( i
measuredδ ) is transformed from the skin-effect corrected measurements.
temude
iiimeasured σσ
σσδ
−−
=+1
secsec ; (7)
,,, 121 −∈Ψ mmeasuredmaesuredmeasuredmeasured δδδ L .
Equation (7) is further derived to the following form: ][ 1+−×= i
bhibh
imeasured GGCδ .
Where,

Halliburton Energy Services
D00204472 Rev E ACRt Field Operations Manual 137
temude
tmudCσσσσ
−−
= .
The pre-calculated data library of the borehole geometrical factors is also transformed and converted into a table (expressed by Φ ) of variables cal and ecc as follows:
,,1;,,1;1,,1);,( _ ecccalkji
calpre NkNjmiecccal LLL ==−=∈Φ δ ;
),,(),,(),( ,1
,_ temudekji
bhtemudekji
bhkji
calpre ecccalGecccalGecccal σσσσδ +−= . (8) Where, calN and eccN are the total number discrete points in cal and ecc respectively. Figure 2 plots the table with the borehole size (cal) being varying and the eccentricity (ecc) being fixed, while the mud conductivity is 1 mS/m and the formation conductivity is 0.01 mS/m. If C equals 1, solving for the geometry variables is just an issue of searching the table. In general, however, solving for the geometry variables is achieved by fitting the pattern vector ( measuredΨ ) to the pattern vectors transformed from the pre-calculated borehole geometrical factors that are stored in a data library. The pattern matching can be implemented by means of an objective function, defined as
pm
i
icalpre
imeasuredi ecccalbecccalT ∑
−
=
−=1
1_ ),(),( δδ . (9)
Where, ib is the weighting factor corresponding to ith element of the pattern vector, which is normally chosen 1. The power p defines the type of norm used, which is normally chosen 2. i
measuredδ is calculated from skin-effect corrected measurements with Equation (7). i
calpre _δ is ith element of the pattern vector transformed from pre-calculated borehole geometrical factors. The objective function (T) varies with the borehole size (cal) and the eccentricity (ecc) as i
calpre _δ is a function of the borehole size (cal) and the eccentricity (ecc). The best fitted cal and ecc will yield the minimum target function T. These best fitted cal and ecc are the solutions of the borehole size and the eccentricity under the presently estimated mud conductivity ( mudeσ ) and formation conductivity ( teσ ). Other pattern matching methods can be also used to find the best fitted cal and ecc. Once the geometry variables are solved, the mud conductivity ( mudσ ) and the formation conductivity ( tσ ) can be obtained by solving the following linear equation system.
⎪⎪⎩
⎪⎪⎨
⎧
−×+×=
−×+×=−×+×=
)1(
)1()1(
222
111
mt
mmud
m
tmud
tmud
bhbha
bhbha
bhbha
GG
GGGG
σσσ
σσσσσσ
M . (10)
The borehole geometrical factors ( 1bh
G through mbh
G ) are obtained from the data library interpolated on the basis of estimated mud conductivity, estimated formation conductivity, inverted borehole size and

Halliburton Energy Services
138 ACRt Field Operations Manual D00204472 Rev E
inverted eccentricity. The inversion of the geometry variables and the inversion of the conductivity variables are still linked due to the fact that the borehole geometrical factors are functions of the all four environmental variables. This link leads to iterative applications of the two separate inversions.
Adaptive Borehole Correction System
Based on the methodology presented above, an adaptive borehole correction system is developed. The system is based on a data library of borehole geometrical factors and features with the separate solutions of geometry variables and conductivity variables. Figure 3 presents the configuration of the system. The system consists of three major components named as: “data library”, “work engine” and “work space”. The data library contains pre-calculated borehole geometrical factors and resolution-matching filters. The geometrical factors for each sub-array are stored as a four-dimensional data set, corresponding to the four environmental variables. Each geometrical factor is extracted from a modeled result by the following equation.
itim
ititimicieiaitimicieia
tm
ttmuda
tmudbh
calecccaleccG
σσσσσσ
σσ−
−=
),,,(),,,( . (11)
ntitnmimncicneiemia
,,2,1,,2,1
,,2,1,,2,1,,2,1
L
L
L
L
L
=====
Where, itt
σ is the itth discrete formation conductivity; immud
σ is the imth discrete mud conductivity; calic is the icth discrete borehole diameter; eccie is the ieth discrete tool eccentricity. ecc defines the distance between the tool center and the borehole center. ia
aσ is the modeled and skin-effect corrected apparent conductivity of the iath sub-array. ia
bhG is the borehole geometrical factor of the iath sub-array. The “data library” also contains pre-designed resolution-matching filters. Because the real formation is not infinitely thick and different sub-array has different vertical response, the array induction measurements at a specific depth are mixtures of formation signal, borehole signal and shoulder-bed signal. The resolution-matching filters are used to make the measurements of all sub-arrays to have equal shoulder-bed effect so that the resolution-matched measurements can be treated as they were from an infinitely thick formation, which is the assumption that the borehole correction method is established. The “work engine” comprises of five modules: Resolution Matching, Initial Formation Conductivity Estimation, Inversion for Geometry Variables, Inversion for Conductivity Variables, and Borehole Correction.

Halliburton Energy Services
D00204472 Rev E ACRt Field Operations Manual 139
The Resolution Matching module applies the resolution-matching filters to measurements of each sub-array to produce resolution-matched measurements, on which the inversion for the four environmental variables is based. The Initial Formation Conductivity Estimation module estimates the formation conductivity by weighted average of the resolution matched measurements. Or,
∑ ×=m
ia
iaaia
init wt
σσ . (12)
Because of the possible existence of invasion, the formation conductivity in the context of borehole correction is actual an equivalent conductivity, which lies between the invaded zone conductivity and the un-invaded zone conductivity. Therefore, the distribution of weights centers preferably on the sub-arrays of medium depth of investigation. The Inversion for Geometry Variables module solves for the borehole size and the eccentricity in the pattern domain. Because the dynamic range for the borehole size and the eccentricity is relatively small, whole-range searching for the solution is proven reliable and efficient enough. The Inversion for Conductivity Variables module solves for the formation conductivity and the mud conductivity on the basis of the linear equation system shown in Equation (8) with a quadratic programming method. The Inversion for Geometry Variables module and the Inversion for Conductivity Variables module are applied iteratively until the solutions are stable or the number or iterations reaches the pre-set limit. Once the four environmental variables are ready, the Borehole Correction module applies the borehole correction to the skin-effect corrected measurements with Equation (1), resulting in borehole corrected measurements. The “work space” consists of classes and/or arrays to store the inputs, outputs and the intermediate results, namely: the skin-effect corrected array induction measurements, the resolution-matched array induction measurements, four environmental variables, and the borehole corrected array induction measurements.
Application of the Adaptive Borehole Correction System The adaptive borehole correction system has been implemented and applied to an array induction tool. The sub-arrays of the tool are spaced by 80 inches (sub1), 50 inches (sub2), 29 inches (sub3), 17 inches (sub4), 10 inches (sub5), and 6 inches (sub6) from the common transmitter. The raw measurements from those sub-arrays are processed through skin-effect correction, borehole-effect correction and software focusing to produce vertical-resolution matched curves of six depths of investigation, named: 6in, 10in, 20in, 30in, 60in and 90in.

Halliburton Energy Services
140 ACRt Field Operations Manual D00204472 Rev E
The system has been tested with synthetic data set and field data as well. Figure 4 shows modeled skin-effect corrected array induction measurements. The formation is a “chirp” model with the borehole diameter Cal of 10 inches, the mud resistivity Rmud of 0.2 Ohmm, the formation resistivity Rt of 20.0 Ohmm, the shoulder-bed resistivity Rs of 2.0 Ohmm, and the invaded zone resistivity Rxo of 5.0 Ohmm. The borehole effect is obvious on the three short sub-arrays. For instance, sub6 reads about 1600 mS/m against the shoulder bed while sub1 reads around 500 mS/m. If the borehole effect is not removed, the borehole effect propagates through the software focusing process, resulting in curves of false curves separation as shown in Figure 5. Figure 6 shows the borehole corrected measurements. Comparing the sub6 curves on Figure 5 and Figure 6, we can see more than 1000 mS/m is removed as the borehole effect. Applying the software focusing process to these borehole corrected measurements, we obtain curves shown on Figure 7, where the curve separation reflects the existence of invasion. The curves stack against shoulder bed sections. Figure 8 presents a set of array induction skin-effect corrected measurements before borehole correction. The borehole is fiberglass-cased and contains a fluid of around 285 mS/m conductivity. The original borehole size is unknown. The bit size is 7.875 inches. Because the mud conductivity is close to the conductivity of the high-conductivity sections, the borehole effect over these high-conductivity sections are relatively small. Over the low-conductivity sections, however, the borehole effect is significant. The borehole correction is conventionally conducted with measured mud conductivity and a provided borehole size, which is the bit size. The borehole corrected measurements are shown in Figure 9. With the adaptive borehole correction system, the borehole size is inverted from the induction measurements by setting the BHC Flag at 3. The inverted borehole size is shown in Figure 10. The validity of the invented cal can only be directly confirmed with the open-hole caliper measurement. However, sands of less than 1000ft depth can be very uncompressed and inclined to have borehole enlargements. With the inverted borehole size and the measured mud conductivity, the borehole correction yields slightly different borehole corrected measurements shown in Figure 11. The differences of the borehole corrected measurements between Figure 9 and Figure 11 are over the low-resistivity sand sections.
Conclusions Array induction measurements are subject to borehole effect. Correcting for the borehole effect requires the borehole size, the tool eccentricity, the mud conductivity and the formation resistivity. Adaptive borehole correction inverts for those environmental variables based on array induction measurements, with or without mud conductivity measurement and with or without borehole size measurement, to achieve an optimized borehole correction.

Halliburton Energy Services
D00204472 Rev E ACRt Field Operations Manual 141
In-depth insight into the borehole effect and its correction leads to a novel adaptive borehole correction method and system, which is based on a data library of borehole geometrical factors and features with a pattern matching method. The adaptive borehole correction system has been implemented and applied to an array induction tool. It has been successfully tested with modeled data and field data as well.
Conductivity Parameters:Conductivity Parameters:
---- σσ tt---- σσ mm
Geometry Parameters:Geometry Parameters:
---- CaliperCaliper
---- EccentricityEccentricity
BoreholeBorehole
σ mσσ tt
Logging Logging ToolToolCaliper
EccentricityEccentricity
σσ mm

Halliburton Energy Services
142 ACRt Field Operations Manual D00204472 Rev E
Borehole Geometrical Factor(Rt=100 Ohmm, Rm=1 Ohmm, Ecc=0)
Borehole Diameter (in)
0 5 10 15 20 25 30 35-0.2
0.0
0.2
0.4
0.6
0.8
80in.50in.29in.17in.10in.6in.
Borehole Geometrical Factor Difference(Rt=100 Ohmm, Rm=1 Ohmm, Ecc=0)
Borehole Diameter (in)
0 5 10 15 20 25 30 35-0.05
0.00
0.05
0.10
0.15
0.20
0.25
0.30
50in.-80in.29in.-50in.17in.-29in.10in.-17in.6in.-10in.
Figure 2 -- a set of pattern vectors along with borehole size.
Figure 1 -- a set of typical borehole geometrical factors along with the borehole size.
Bor
ehol
e G
eom
etric
al F
acto
rB
oreh
ole
Geo
met
rical
Fac
tor D
iffer
ence

Halliburton Energy Services
D00204472 Rev E ACRt Field Operations Manual 143
Res
olut
ion
Mat
chin
g
Inve
rsio
n fo
r Ec
cent
ricity
and
B
oreh
ole
Siz
e
Inve
rsio
n fo
r Mud
an
d Fo
rmat
ion
Con
duct
iviti
es
Bor
ehol
e C
orre
ctio
n
Ski
n-Ef
fect
C
orre
cted
M
easu
rem
ents
Bore
hole
-Cor
rect
ed
Mea
sure
men
ts
Initi
al F
orm
atio
n C
ondu
ctiv
ity E
stim
atio
n
Mud
Con
duct
ivity
Form
atio
n C
ondu
ctiv
ity
Bor
ehol
e S
ize
Ecce
ntric
ity
Bore
hole
G
eom
etric
al
Fact
ors
Res
olut
ion
-Mat
chin
g Fi
lters
Res
olut
ion-
Mat
ched
M
easu
rem
ents
Wor
k S
pace
Wor
k En
gine
Dat
a Li
brar
y
Res
olut
ion
Mat
chin
g
Inve
rsio
n fo
r Ec
cent
ricity
and
B
oreh
ole
Siz
e
Inve
rsio
n fo
r Mud
an
d Fo
rmat
ion
Con
duct
iviti
es
Bor
ehol
e C
orre
ctio
n
Ski
n-Ef
fect
C
orre
cted
M
easu
rem
ents
Bore
hole
-Cor
rect
ed
Mea
sure
men
ts
Initi
al F
orm
atio
n C
ondu
ctiv
ity E
stim
atio
n
Mud
Con
duct
ivity
Form
atio
n C
ondu
ctiv
ity
Bor
ehol
e S
ize
Ecce
ntric
ity
Bore
hole
G
eom
etric
al
Fact
ors
Bore
hole
G
eom
etric
al
Fact
ors
Res
olut
ion
-Mat
chin
g Fi
lters
Res
olut
ion
-Mat
chin
g Fi
lters
Res
olut
ion-
Mat
ched
M
easu
rem
ents
Wor
k S
pace
Wor
k En
gine
Dat
a Li
brar
y
Figu
re 3
---C
onfig
urat
ion
of th
e ad
aptiv
e bo
reho
le c
orre
ctio
n sy
stem
.

Halliburton Energy Services
144 ACRt Field Operations Manual D00204472 Rev E
0 20 40 60 80 100 120 140
1
10
6in10in20in30in60in90in
0 20 40 60 80 100 120 140
100
1000
sub1sub2sub3sub4sub5sub6
Appa
rent
Con
duct
ivity
(mS
/m)
Depth (ft)
Fig. 4 --- Modeled array induction measurements before borehole correction. The formation is a “chirp” model with: Cal = 10 inches, Rmud = 0.2 Ohmm, Rt = 20.0 Ohmm, Rs = 2.0 Ohmm, Rxo = 5.0 Ohmm.
Depth (ft)
App
aren
t Res
istiv
ity(O
hmm
)
Fig. 5 --- Array induction software focused curves processed with non-borehole corrected measurements shown in Fig.2.

Halliburton Energy Services
D00204472 Rev E ACRt Field Operations Manual 145
0 20 40 60 80 100 120 140
1
10
6in10in20in30in60in90in
Fig. 6 --- Borehole corrected array induction measurements produced from the measurements shown in Fig.2.
0 20 40 60 80 100 120 140
100
1000
sub1sub2sub3sub4sub5sub6
Depth (ft)
Appa
rent
Con
duct
ivity
(mS
/m)
Depth (ft)
Fig. 7 --- Array induction software focused curves processed with borehole corrected measurements shown in Fig.4.
App
aren
t Res
istiv
ity(O
hmm
)

Halliburton Energy Services
146 ACRt Field Operations Manual D00204472 Rev E
500 550 600 650 700 750 800
1
10
100
1000
sub1sub2sub3sub4sub5sub6
500 550 600 650 700 750 800
1
10
100
1000
sub1sub2sub3sub4sub5sub6
Appa
rent
Con
duct
ivity
(mS
/m)
Appa
rent
Con
duct
ivity
(mS
/m)
Depth (ft)
Depth (ft)
Fig. 9 --- Borehole corrected measurements processed measured mud conductivity and provided borehole size (BHC Flag = 1).
Fig. 8 --- Field array induction measurements before borehole correction. The borehole is fiberglass-cased and contains a fluid of around 285 mS/m conductivity. The original borehole size is unknown. The bit size is 7.875 inches.

Halliburton Energy Services
D00204472 Rev E ACRt Field Operations Manual 147
500 550 600 650 700 750 8002
4
6
8
10
Bit size (in)Inverted Cal (in)Rmud (Ohmm)
500 550 600 650 700 750 800
1
10
100
1000
sub1sub2sub3sub4sub5sub6
Appa
rent
Con
duct
ivity
(mS
/m)
Depth (ft)
Depth (ft)
Fig. 11 --- Borehole corrected measurements processed with measured mud conductivity and inverted borehole size (BHC Flag = 3).
Fig. 10 --- Inverted borehole size. The bit size and the mud resistivity are also presented as references.
Bit
/ Cal
/ R
mud

Halliburton Energy Services
148 ACRt Field Operations Manual D00204472 Rev E
Appendix C – ACRtTM Algorithm Theory
Inversion with a Quantitative Pattern Recognition Inversion refers to a methodology by which model parameters are derived from measurement data. The inversion methodology is achieved by searching for a minimum point of an object function which is conventionally the misfit between the field measurements and the numerically forward computed measurements. When the object function reaches its minimum point, the model used for the numerical forward computation is taken as the model underlying the field measurements. To search for the minimum point of the object function, the model parameters used for the numerical forward computation is automatically adjusted on the basis of optimization schemes.
There are two noticeable subjects in the inversion technique: poor resolution and simultaneity. Some of the model parameters to be derived have very weak dependence to the misfit and can be only derived by the inversion with a large uncertainty. These model parameters are said of poor resolution. The inversion is eventually solved by optimization schemes, therefore, the fewer the number of model parameters is the more efficient and the more stable is the solution. But, in reality, some of the model parameters have to be solved simultaneously. Those model parameters are said of simultaneity. These two subjects make the inversion technique very subtle.
The present inversion methodology breaks through the conventional inversion philosophy on object function, resulting in a new way to tackle the problems of poor resolution and simultaneity. The method developed is suitable for a broad variety of inversion problems. As an example, the radial inversion of array induction logs is illustrated with this new method.
Section
C

Halliburton Energy Services
D00204472 Rev E ACRt Field Operations Manual 149
Radial Inversion of Array Induction Logs Array induction tools measure formation resistivity with several different depths of investigation. ACRtTM, HACRt and HRAI are typical array induction tools. ACRtTM acquires induction measurements with 6 sub-arrays and operates at three frequencies simultaneously. The raw induction measurements are processed through skin-effect correction, borehole correction and software focusing. Three sets of final logs are produced with 1-foot, 2-foot and 4-foot vertical resolution. Each set contains 5 induction logs with investigation depth of 10 inches, 20 inches, 30 inches, 60 inches and 90 inches respectively. From the array induction measurements or processed measurements, inversion technique is used to determine the formation model parameters, such as the true conductivity ( tσ ), invasion zone conductivity ( xoσ ) and invasion depth (DI). The invasion depth (DI) is here defined as the radial distance from the borehole axis to the invasion front. Because an induction tool responds to its surrounding volume that includes borehole, shoulder-bed formation, mud-filtrate-invaded zone of the formation and virginal zone of the formation, to solve for all the formation model parameters a 2D inversion is theoretically needed in vertical wells and a 3D inversion is needed in deviated wells. The array induction processing system, however, efficiently corrects for borehole effect, matches vertical resolution and even removes the dipping effect. The resulted logs at a specific depth can be interpreted as logs of infinitely thick formation. Radial 1D inversion is, therefore, commonly used to solve for the tσ , xoσ and DI in well-site processing. Under the radial 1D assumption, an induction measurement can be expressed as
∫∞
=0
)()( drrrRGF iia σσ . (1)
Where, RGF is the radial geometrical factor of the induction measurement. The superscript (i) indicates the ith one of the array induction measurements. If )(rσ is an arbitrary function of the radius (r), )(rσ is unsolvable with limited number of measurements. Pre-assumption of )(rσ has to be introduced. Figure 1 shows three typical pre-assumptions: step profile (a), linear transition profile (b) and smooth transition profile (c). For array induction interpretation, the smooth transition profile is mostly applied though different function may be used to describe the smooth transition (Howard, 1992). For the sake of simplicity, we choose the step profile in this context. Under the pre-assumption of step profile of the invasion, Equation (1) is simplified into the following form;
)](1[*)(* DIIRGFDIIRGF it
ixo
ia −+= σσσ . (2)

Halliburton Energy Services
150 ACRt Field Operations Manual D00204472 Rev E
Where, IRGF is the integrated radial geometrical factor. Obviously, the invasion profile is defined by three model parameters: the invasion zone conductivity ( xoσ ), the true formation conductivity ( tσ ) and the invasion depth (DI). With more than three independent array induction measurements, we should be able to solve for these three model parameters. Because of the non-explicitness of the IRGF dependence with DI, an inversion has to be used for the DI, tσ and xoσ . As the first step of the inversion, a misfit object function (Omis) is conventionally formed as follows.
tionregularizaDIwDIOpN
ixot
ia
iamixotmis +−= ∑ ),,(),,( σσσσσσ . (3)
Where, N is the total number of measurements, which is 6 for HRAI and 5 for ACRtTM; i
amσ is the ith
array induction field measurement; iaσ is the ith array induction forward-computed measurement; p...
denotes norm of the pth order; p is mostly set to 2 for inversion under the least square sense; iw is the weighting factor used to take care of measurement uncertainty. The term, regularization, is to stabilize the solution of the optimization problem. There are numerous different ways to construct the regularization, resulting in different inversion methods, such as the maximum entropy inversion, maximum flatness inversion and minimum oil inversion. Different sorts of constraints can be applied, depending on the optimization scheme used. By evaluating the partial derivatives of the misfit object function with respect to all the model parameters, one could analyze the resolvability of the model parameters (DI, tσ and xoσ ) and concluded that DI can be only poorly resolved. This conclusion dims several DI-related applications, such as permeability indication. Quantitative Pattern Recognition Inversion Quantitative pattern recognition can be defined as the quantitative categorization via the extraction of the significant features or attributes of the data from a background of irrelevant detail. In the light of the quantitative pattern recognition, it is found that information of the invasion depth (DI) lies in the pattern that the array induction measurements form, while, weakly relates to the amplitude of an individual measurement. Figure 2 shows the dependence of HRAI array induction measurements with invasion depth. The formation true resistivity is 1 Ω-m and the invasion zone resistivity is 20 Ω-m. The information of invasion depth is clearly contained in the trend formed by the measurements. For example, when there is no invasion (DI=0), the array induction measurements essentially read the same as each other. As the invasion depth increases, shallow measurements start to separate from the deep measurements and the array induction measurements separate from each other when the invasion depth reaches deep (>60 inches).

Halliburton Energy Services
D00204472 Rev E ACRt Field Operations Manual 151
For the detailed description of the information extraction, we introduce the multi-dimension Euclidean space. The array induction measurements can be expressed as a point in the “measurement space”, presented by a multi-element vector ( aΩ ), containing the measurements of 10in-, 20in-, through 120in-investigation depth for HRAI case. Or,
,,,,, 654321aaaaaaa σσσσσσ=Ω . (4)
The trend of the measurements can be mathematically extracted by constructing a pattern vector (Ψ ), corresponding to a point in the “pattern space”, which is defined as
,,,, 54321 δδδδδ=Ψ . (5) Where,
61
1
aa
ia
iai
σσσσ
δ−−
=+
. (6)
The construction of the pattern vector is not unique. Several different constructions may exist and all adequately express the same pattern. Equation (6) is just a normalized difference and its legitimacy is given in appendix A. Generally speaking, different type of problem requires different construction of the pattern vector. The information about the invasion depth (DI) is extracted and expressed with the pattern vector (Ψ ) by the transformation from the measurement space to the pattern space. In the pattern space, the invasion depth (DI) becomes well-resolvable and can even be separated from the other two model parameters, tσ and xoσ . Inversion technique can be applied in pattern space. The object function here is no longer the misfit. Instead, it represents the Euclidean distance and is referred to as quantitative pattern recognition object function (Oqpr). Mathematically,
tionregularizaDIwDIOpM
ixot
ic
imixotqpr +−= ∑ ),,(),,( σσδδσσ . (7)
Where, M is the number of elements of the pattern vector, which is 5 for HRAI case; i
mδ is the ith element of the pattern vector transferred from the field measurements; i
cδ is the ith element of the pattern vector transferred from the forward-computed measurements. The inversion based on Equation (7) is referred to as QPR inversion. Figure 3 shows forward-computed HRAI measurements in radial 1D formation with true formation resistivity of 100 Ω-m, invasion zone resistivity of 2 Ω-m and invasion depth of 47 inches. Taking this data set as the field measurements, we calculate the misfit object function with Equation (3) and the QPR object function with Equation (7). In the calculation the regularization is set to zero and iw is set to one.

Halliburton Energy Services
152 ACRt Field Operations Manual D00204472 Rev E
Figure 4 presents the misfit object function and the QPR object function calculated with both the formation resistivity and invasion zone resistivity chosen as the true values. In this case, both misfit object function and QPR object function have minimum points at the invasion depth of 47 inches. When the formation resistivity is chosen on its true value but the invasion zone resistivity is chosen off its true value, the misfit object function shows a minimum point at around 85 inches of invasion depth, while, the QPR object function still indicates 47 inches of invasion depth (Figure 5). Figure 6 presents the misfit object function and the QPR object function calculated with both the formation resistivity and invasion zone resistivity off their true values. The QPR object function still firmly indicates 47 inches of invasion depth, while, the misfit object function fails to point the right value of the invasion depth. Figure 7, Figure 8, Figure 9 and Figure 10 present another case. In Figure 7 are the forward-computed HRAI measurements in radial 1D formation with true formation resistivity being 10 Ω-m, invasion zone resistivity being 20 Ω-m and invasion depth being 30 inches. In Figure 8 are the misfit object function and the QPR object function calculated with both the formation resistivity and invasion zone resistivity chosen as their true values. In Figure 9 the formation resistivity and the invasion zone resistivity are chosen off their true values by a small amount. Then, the QPR object function indicates 30 inches of invasion depth, while, the misfit object function fails to point the right value of the invasion depth. Even when the formation resistivity and the invasion resistivity are chosen off their true values by relatively large amount (in Figure 10), the minimum point of QPR object function is just slightly off the true invasion depth. Comparing the misfit object function with the QPR object function shown in Figure 4, Figure 5, Figure 6, Figure 8, Figure 9 and Figure 10, we can draw the following observations.
(a) When the misfit object function is used, error in the determination of formation conductivity and invasion zone conductivity propagates into the solution of the invasion depth. The error in the solution of the invasion depth propagates into the solutions of the formation conductivity and invasion zone conductivity in return. This strong interaction among the solutions of the model parameters forces us to solve for all these model parameters simultaneously. When the initial guess of the model parameters is chosen improperly, what is more, the iterative procedure of the optimization can be divergent.
(b) When the QPR object function is used, the solution of the invasion depth is relatively
independent of the correctness of the determination the formation conductivity and the invasion zone conductivity. This feature allows the separation of the solution of invasion depth from the determination of the formation conductivity and the invasion zone conductivity. As the matter of fact, once the invasion depth is known, the relation of the array induction measurements with the formation conductivity and the invasion conductivity becomes linear (see Equation 2). Therefore, the formation conductivity and the invasion conductivity can be determined by solving a linear equation system.

Halliburton Energy Services
D00204472 Rev E ACRt Field Operations Manual 153
Applications of QPR inversion Conventional inversion schemes are implemented by minimizing the misfit between the field measurements and forward-computed measurements. Although some of the parameters to be inverted in a specific problem relate to the measurements directly, some relate to the measurements indirectly. The existence of those indirect parameters complicates the whole inversion. Typical complications are (1) that the parameters, including the “direct” ones and the “indirect” ones, have to be solved simultaneously, resulting in minimization problems of poor convergence; and (2) that the indirect parameters are normally solved with large uncertainty. Those complications largely affect the efficiency and reliability of the inversion schemes. The core scheme for QPR inversion is presented in Figure 11 with a flowchart. Though the QPR inversion scheme can be used stand-alone, its advantages are fully made use when it hybrids with conventional inversion schemes. Figure 12 gives the flowchart of the hybrid implementation. The QPR scheme is used to invert for the indirect parameters in the pattern space, while, the conventional inversion schemes is used to invert for the direct parameters in the measurement space. Iteration approach can be applied to form a more sophisticated method. With direct parameters given, the indirect parameters can be better inverted for with the QPR scheme. With more accurate indirect parameters, the direct parameters can be better solved in return. The iteration continues until the convergence checks are satisfied. The procedures are briefed as:
(1) Estimating the direct parameters from the field measurements; (2) Transforming the field measurements into pattern space; (3) Inverting for the indirect parameters in pattern space; (4) Inverting for the direct parameters in the measurement space; (5) Calculating the misfit in the measurement space; (6) Checking for convergence on the base of the misfit; (7) Going to (8) on convergence or going to (3) for next iteration; (8) Outputting final inversion results.
In the radial inversion of array induction measurements, the invasion depths are typical indirect parameters (D1 and D2) and the conductivities ( tσ and xoσ ) are direct parameters. Following the procedures described above, the radial inversion of array induction measurements is formulated as shown by the flowchart in Figure 13. The QPR scheme inverts for the invasion depths. The conventional scheme inverts for the conductivities. The implementation is described by the following procedure:
(1) Estimate the invasion depth(s): DI if the step invasion profile is used, or D1 and D2 if the transition invasion profile is used;
(2) Transform the field measurements into the pattern space; (3) Invert for the invasion depth(s) by 1D (2D) optimization in the pattern space; (4) Invert for the formation conductivity and invasion zone conductivity by a linear optimization in
the measurement space; (5) Calculate the misfit in the measurement space; (6) Check for convergence on the base of the misfit;

Halliburton Energy Services
154 ACRt Field Operations Manual D00204472 Rev E
(7) Go to (8) on convergence or go to (3) for next iteration; (8) Output the invasion depth(s) and the formation conductivity and invasion conductivity as the
final inversion results. In the 2D inversion of induction measurements, the conductivities (formation conductivity and invasion zone conductivity) are direct parameters and the geometries (boundary position and invasion depth) are indirect parameters. If the geometries are known, the conductivities are linearly related to the measurements and can be solved with linear optimization. The geometries nonlinearly relate to the measurements and can only be solved with nonlinear optimization. Because the misfit object function is used, the two groups of model parameters are not successfully separated and solved sequentially. With QPR inversion, the 2D inversion can be implemented as described by the flowchart in Figure 14. Although the QPR inversion is introduced with the inversion of array induction measurements, the methodology can be applied to a broad variety of inversion problems. In various inversion problems, many model parameters, such as borehole size relative dip angle, anisotropy, permeability, frequency dispersion and wettability of reservoir formations are typical parameters about which the information lies in the trends of the measurements. They are difficult to be solved using the conventional misfit object functions. The QPR inversion will certainly be applied to all those problems. In all the applications of QPR inversion, efficiency and stability are the two obvious advantages. Besides, certain model parameters can now be solved which previously are classified as poorly resolvable.
Appendix A
Legitimacy for the pattern vector construction by Equation (6) Under the pre-assumption of step invasion profile and of radial 1D formation, the ith array induction measurement can be expressed by Equation (2).
)](1[*)(* DIIRGFDIIRGF it
ixo
ia −+= σσσ . (2)
From Equation (2), the difference between i
aσ and 1+iaσ is obtained as the following,
)]()([*)( 11 DIIRGFDIIRGF ii
txoia
ia
++ −−=− σσσσ . (A-1)
The right hand side of Equation (A-1) is a product of two terms. The first term )( txo σσ − has nothing to do with invasion depth while, the second term, )]()([ 1 DIIRGFDIIRGF ii +− is apparently independent of the formation conductivity and invasion zone conductivity. Although the geometrical factors vary with background conductivity, it is treated as a constant once the background conductivity is estimated from the field measurements. From Equation (A-1), therefore, we can construct a pattern vector which well expresses the information about the invasion depth. Mathematically, we have

Halliburton Energy Services
D00204472 Rev E ACRt Field Operations Manual 155
)()( 11
DIIRGFDIIRGF ii
txo
ia
ia +
+
−=−−
σσσσ
. (A-2)
Because xoσ and tσ are unknown, we use the difference between the shallowest measurement and the deepest measurement in the place of )( txo σσ − , resulting in Equation (6).
61
1
aa
ia
iai
σσσσ
δ−−
=+
. (6)
There may be different ways to approximate )( txo σσ − , but the pattern vector constructed by Equation (6) does extract the information about invasion depth with irrelevant background suppressed. Or,
)]()([ 161
1
DIIRGFDIIRGF ii
aa
ia
iai +
+
−∝−−
=σσσσ
δ . (A-3)
The construction of the pattern vector is not unique. Several different constructions may exist and adequately express the same pattern for QPR inversion purpose. Equation (6) is just one of the several. In addition, different type of problem generally requires different construction of the pattern vector.
Figure 1 – Three typical pre-assumed invasion profile that can be used for invasion profile: (a) step profile; (b) linear transition profile; (c) smooth transition profile.

Halliburton Energy Services
156 ACRt Field Operations Manual D00204472 Rev E
Figure 2 – Dependence of array induction (HRAI) measurements with invasion depth. The trend formed by the measurements clearly contains the information of invasion depth.
Figure 3 -- Forward-computed HRAI measurements in a radial 1D formation with true formation resistivity being 100 Ω-m, invasion zone resistivity being 2 Ω-m and invasion depth being 47 inches.

Halliburton Energy Services
D00204472 Rev E ACRt Field Operations Manual 157
Figure 4 -- The misfit object function and the QPR object function calculated with both the formation resistivity and invasion zone resistivity chosen as their true values.
Figure 5 -- The misfit object function and the QPR object function calculated with the formation resistivity being its true value while the invasion zone resistivity being off its true values.

Halliburton Energy Services
158 ACRt Field Operations Manual D00204472 Rev E
Figure 6 -- The misfit object function and the QPR object function calculated with both the formation resistivity and invasion zone resistivity chosen off their true values.
Figure 7 -- Forward-computed HRAI measurements in a radial 1D formation with true formation resistivity being 10 Ω-m, invasion zone resistivity being 20 Ω-m and invasion depth being 30 inches.

Halliburton Energy Services
D00204472 Rev E ACRt Field Operations Manual 159
Figure 8 -- The misfit object function and the QPR object function calculated with both the formation resistivity and invasion zone resistivity chosen as their true values.
Figure 9 -- The misfit object function and the QPR object function calculated when both the formation resistivity and invasion zone resistivity are chosen off their true values by small amount.

Halliburton Energy Services
160 ACRt Field Operations Manual D00204472 Rev E
Figure 10 -- The misfit object function and the QPR object function calculated when both the formation resistivity and invasion zone resistivity are chosen off their true values by relatively large amount.

Halliburton Energy Services
D00204472 Rev E ACRt Field Operations Manual 161
Field Measurements
Transforming into Pattern Space
Indirect Parameters
Inverting for Indirect Parameters
in Pattern Space
Estimating Direct Parameters

Halliburton Energy Services
162 ACRt Field Operations Manual D00204472 Rev E
Field Measurements
Transforming into Pattern Space
Indirect Parameters
Inverting for Indirect Parameters
Inverting for Direct Parameters
Direct Parameters
Calculating Misfit
Misfit<Threshold
Indirect Parameters and Direct Parameters
Estimating Direct Parameters
N
Y
Flowchart for the inversion of generic logs with the QPR method inverting for the indirect parameters of the formation model

Halliburton Energy Services
D00204472 Rev E ACRt Field Operations Manual 163
High Array Induction Log Sensitivity to Invasion Apparent invasion responses on array induction tools are governed by a host of variables: the depth of invasion, the resistivity contrast of the invaded and un-invaded zones, the radial geometric factors of the radial logs, bed thickness, and the borehole correction and processing schemes employed. The relationship between the invasion depth and the curve separation is non-linear The HRAI, ACRtTM, HACRt (Halliburton Tools), the HDIL (Baker Hughes), and the AIT (Schlumberger) typically could exhibit different responses (curve separation) to a given invasion condition. The following discussion contains the methodology by which one can understand and account for these differences. A convenient way to characterize an array induction tool’s response to invasion is to analyze the difference of the geometrical factors for the shallowest and deepest radial curves. This work has been done on the ACRtTM, HACRt and HRAI. It has been found that the depth of invasion must be greater than 6” for all tools radial curves to display appreciable separation. In addition, the bed thickness must exceed 5’ and Rt : Rxo should be larger than 2. Array Induction Curve Separation One application of array induction data is to describe the near-wellbore invasion profile. Provided there is a resistivity contrast between the mud filtrate and native fluids, the availability of both shallow and deep reading measurements permits one to detect the radial position of the invasion front. The shallowest and deepest logs of an array induction tool, processed or raw, normally form the envelope of the observed invasion response and we will focus on these two logs in this discussion. Assuming a step-type (or piston-type) invasion, xoσ denotes the invasion zone conductivity, tσ denotes the virgin formation conductivity and DI denotes the invasion depth defined as the radial distance from the borehole wall to the invasion front. The shallowest and deepest measurements are expressed as
tshallowxoshallowshallow DIIRGFDIIRGF σσσ ×−+×= )](1[)( ; tdeepxodeepdeep DIIRGFDIIRGF σσσ ×−+×= )](1[)( . Where, the IRGF is the integrated radial geometrical factor that represents the radial response function of an induction measurement. Taking the absolute difference of the two measurements, we get
)()( DIIRGFDIIRGF deepshallowtxodeepshallow −×−=− σσσσ . (1) This simple equation clearly shows us that induction log separation depends on not only the difference of the response functions but also the difference between the conductivities of the invaded formation and the virginal formation. When the invasion depth is fixed, the log separation is proportional to the difference between xoσ and tσ , and in order for array induction logs to have a visible curve

Halliburton Energy Services
164 ACRt Field Operations Manual D00204472 Rev E
separation, the contrast ratio of xoσ and tσ needs to be at least about 2 as the logs are displayed in logarithmic scale. When the difference between xoσ and tσ is fixed, the log separation is a function of the depth of invasion.
Separation and Invasion Depth The above explanation is intuitive and in the domain of common knowledge. What is frequently overlooked, however, is that the above mentioned relationships are not linear. While radial curve separation does increase with increasing invasion depth, it does so only up to a point, beyond which curve separation actually decreases.
ACRtTM Integrated Radial Geometrical Factors (Raw Measurements)
Figure 1 – ACRtTM integrated radial geometrical factor of the shallowest and deepest arrays To examine this non-linearity in more detail, we will assume the difference between xoσ and tσ is fixed. In this case, radial curve separation is controlled by the integrated geometrical factors. More precisely, separation is controlled by the difference of the geometrical factors, for shallowest and deepest sub-arrays. In Figure 1, we see the ACRtTM integrated radial geometrical factors for the shallowest (18-in spacing) and the deepest arrays (78-in spacing).

Halliburton Energy Services
D00204472 Rev E ACRt Field Operations Manual 165
Figure 2 - The difference in radial geometric factors for the raw 78” and 18” ACRtTM data and the software focused computed 120” and 10” radial curves These radial geometric factors are subtracted from each other to yield the curves shown in Figure 2. The dot-dashed blue curve represents the difference for the ACRtTM raw data (18” and 78”). The solid red curve represents the difference for computed radial curves (10” and 120”), derived from the standard 2D software focusing algorithm Array induction tools need software processing to produce final logs. Normally many tasks are assigned to the processing, such as matching the vertical resolution, symmetrization of the raw responses, compensating for borehole rugosity effects, and so on. Another important task is extrapolation. In extrapolation, software designers seek to reconcile the physical location of the sub-arrays with desired computed radial outputs. For example, while all array induction tools output 10”, 20”, 30”, 60” and 90” computed radial curves; no tool has sub-arrays located exactly at these distances from the transmitter. But the extrapolation process by which the raw data is adjusted for these differences must be managed carefully. In particular, extrapolation must be limited before it introduces propagation noise, which detracts from accuracy and results in spiky, unstable radial curve outputs. In Figure 2, the amount of extrapolation in the ACRtTM is seen by observing the difference between the red and the blue curves. Note that while there is some extrapolation (which slightly enhances sensitivity to shallow invasion), the amount is relatively small and the computed output radial curves can be said to fundamentally honor the underlying raw data. Figure 2 takes us to the following conclusions under the assumption of a fixed difference between xoσ and tσ . (1) As the invasion depth increases, the radial curve separation increases when the invasion

Halliburton Energy Services
166 ACRt Field Operations Manual D00204472 Rev E
depth is less than some critical point. (2) At some critical depth of invasion, separation in the radial curves reaches a maximum. (3) When the invasion depth increases past the critical depth, the log separation decreases as the invasion depth increases. (4) Extrapolation is used in the ACRtTM processing to account for differences between the desired radial and raw sub-array depths of investigation. While this serves to enhance the sensitivity to invasion, the degree of extrapolation is small, which preserve the system noise characteristics and accuracies.
ACRtTM Log Separation Considering curve line thickness, visibility and certain noise, we can establish a threshold for the geometric factor difference. Accounting for our plotting and data handling capabilities, it is practical to choose 0.1 as the threshold. Based on Figure 2, then, the ACRtTM requires an invasion depth of greater than 6” in order to see appreciable visible curve separation. Two dimensional modeling also confirms the conclusions reached above. Figure 3 gives a set of modeling results. The formation is a typical chirp model, in which the bed thickness varies from 1ft through 10ft. The formation model is plotted with Rxo and Rt. In order to study the curve separation against invasion depth, 9 different invasion depths are modeled from 0-in invasion depth through 30-in invasion depth. The curve separation is characterized by the 10-in curve in reference to the 120-in curve in all 9 cases. When the invasion depth is zero, the 10-inch curve overlaps with the 120-in curve. When the bed thickness is less than 5ft, the ACRtTM only weakly indicates the presence of invasion, regardless of how deeply invaded the zone may be. For thicker beds, however, the ACRtTM responds with sufficient fidelity to changes in invasion depth.
ACRtTM Curve Separation vs. Invasion Depth
Depth (ft)

Halliburton Energy Services
D00204472 Rev E ACRt Field Operations Manual 167
Figure 3 – Two-dimensional modeling results of a chirp model. The ACRtTM 10-inch curves are shown to characterize the curve separation in reference to the 120-inch curve. The invasion depth is defined as the radial distance from the borehole wall to the invasion front. In order to analyze the curve separation in more detail, the 9-ft bed is expanded and plotted in Figure 4. From this plot, we can see that visible curve separation can be seen starting with a 6-in invasion depth. This observation is consistent with the conclusion from the analysis of the geometrical factor difference.
ACRtTM Curve Separation vs. Invasion Depth
Depth (ft)
Figure 4 – Expanded two-dimensional modeling results of a 9-ft bed. Visible curve separation can be seen starting with the case of 6-in invasion depth. The 120in curve overlaps the 10in_0id curve.

Halliburton Energy Services
168 ACRt Field Operations Manual D00204472 Rev E
Conclusions and Discussions The response to invasion of the ACRtTM logs is controlled primarily by the depth of invasion and the conductivity contrast of invaded and un-invaded zone. The invasion depth is related to the curve separation through the integrated radial geometrical factors. One will typically observe differences in invasion response among the three competitive array induction offerings (HRAI, ACRtTM, HACRt, AIT, and HDIL). These differences are primarily related to differences in the array geometric factors. The geometrical factor difference between the shallowest array and deepest array quantitatively characterizes the response of an array induction tool to invasion. In order for ACRtTM logs to have a visible indication of invasion, the invasion depths must exceed 6 inches. The bed thickness must exceed 5’ for maximum observed sensitivity. The ACRtTM software processing does enhance the amount of curve separation but the effect is relatively small. In all respects, the software processing employed on the ACRtTM honors the fundamental data integrity. It should be noted that there are several other “idiosyncratic” tool design factors that can contribute usually small, second-order effects on the invasion response. These would include differences in shoulder bed correction, borehole correction, and filtering algorithms. A comprehensive study including these additional factors would require a sharing of proprietary information not currently available and thus, is beyond the scope of this document.

Halliburton Energy Services
D00204472 Rev E ACRt Field Operations Manual 169
\
Field Measurements
Transforming into Pattern Space
Indirect Parameters
Inverting for Indirect Parameters
Inverting for Direct Parameters
Direct Parameters
Calculating Misfit
Misfit<Threshold
Indirect Parameters and Direct Parameters
Estimating Direct Parameters
N
Y
Flowchart for the inversion of generic logs with the QPR method inverting for the indirect parameters of the formation model

Halliburton Energy Services
170 ACRt Field Operations Manual D00204472 Rev E
Field Measurements
Transforming into Pattern Space
Invasion Depths (D1 and/or D2)
Inverting for Invasion Depth in
Pattern Space
Inverting for Conductivities ( tσ and xoσ )
Conductivities ( tσ and xoσ )
Calculating Misfit
Misfit<Threshold
Invasion Depths (D1 and/or D2), Conductivities ( tσ and xoσ )
Estimating Conductivities ( tσ and xoσ )
N
Y
Figure 13 – Flowchart for the 1D radial inversion of induction logs with the QPR method inverting for the invasion depths of the formation model.

Halliburton Energy Services
D00204472 Rev E ACRt Field Operations Manual 171
Field Measurements
Transforming into Pattern Space
Invasion Depths and Boundary
Positions
Inverting for Geometries
Inverting for Conductivities
Conductivities
Calculating Misfit
Misfit<Threshold
2D Formation Parameters (Conductivities + Geometries)
Estimating Conductivities and/or Boundary Positions
N
Y
Figure 14 – Flowchart for the 2D inversion of induction logs with the QPR method inverting for geometry parameters of the formation model.

Halliburton Energy Services
172 ACRt Field Operations Manual D00204472 Rev E
Flowchart for the core scheme of the QPR inversion
Field Measurements
Transforming into Pattern Space
Indirect Parameters
Inverting for Indirect Parameters
in Pattern Space
Estimating Direct Parameters


Halliburton Energy Services
D00204472 Rev E ACRt Field Operations Manual 174
ACRt VS HACRt Log

Halliburton Energy Services
D00204472 Rev E ACRt Field Operations Manual 175
Appendix D – OEBs/NOMEMs, Induction Tool Calibration Fixture Standard & Inspection
Appendix
D

Halliburton Energy Services
176 ACRt Field Operations Manual D00204472 Rev E
Technology Bulletin
Halliburton Logging Services 3000 N. Sam Houston Parkway E., Houston, Texas 77032 USA
No.: NOM-352 Date: 03/29/2006 File: 4.26.24/4.26.47.00/ 4.28.48/4.30.24
SUBJECT: Induction Calibration Stand Testing and Inspection CPI #: N/A Task #: N/A RTA #: N/A
Tool Code: HRIT/ HRAI/ ACRt, HACRt
NOTICE OF MANDATORY EQUIPMENT MODIFICATION Rev. Level: N/A
Mod Kit P/N: N/A Est. Kit Cost: $0.00 Est. # of Units Affected: 0
All parts necessary for completion of NOMEM will be pre-ordered based on data listed in SAP MM. Parts will be charged and shipped to each field location. No orders need to be placed by field locations.
Reason For Change: To outline standards and requirements for testing and inspecting the Induction Calibration Stand, p/n 101212341.
Update Equipment Master Record: Please verify that a SAP Maintenance Notification and a corresponding Maintenance Work Order have been issued for each piece of equipment affected. Contact Houston Technical Services for information on how to proceed in case of the missing documentation. Modification Instructions: Monthly Inspection: All Induction Calibration Stands in service must complete and record a monthly inspection using document D00231531. Yearly Testing: All Induction Calibration Stands in service must undergo a yearly Load Test and should be tested to 1260 lbs as outlined in document D00229028. Labeling: Stands in compliance with the required inspections and load testing must be clearly labeled “MAXIMUM RATED CAPACITY: 1000 lbs.” Stands failing to meet the required standards must be taken out of service.
Technical Services Approval Technology Approval PSL Operations Approval
D. Crawford J. Addison K. Hubbard
B. Carter S. Zannoni D. Dorffer

D00204472 Rev E ACRt Field Operations Manual 177
Technology Bulletin Halliburton Logging Services
3000 N. Sam Houston Parkway E., Houston, Texas 77032 USA
No.: OEB-2006/022Date: 03/21/2006 Type: Mandatory
SUBJECT: Upgrade and Standardization of the Induction Calibration Stand
CPI #: N/A Task #: T00000232799 RTA #: N/A
File Code: 4.26.24/ 4.26.47.00/4.28.48/4.30.24 Tool Code: HRIT/ HRAI/ ACRt/ HACRt
Background: The upgrade encompasses a new design for the lifting cradle as well as the standardization of construction for the structural members of the Induction Calibration Stand. The previous documentation for the Calibration Stand was limited to drawings with minimal details and dimensions, resulting in structures of varying construction, strength and safety. The Induction Calibration Stand is considered an overhead lifting device and as such requires the proper documentation (engineering specifications and calculations), inspection and testing to remain in service. The problem with the previous lifting cradle is derived from the fact that it can cause improper loading of the upper structural members if incorrectly positioned. Tools of varying length (HRIT, HRAI, ACRt. HACRt) exacerbate the situation. Calibration Stand: All documentation for the Induction Calibration Stand p/n 101212341 A has been updated or created. This includes the following:
1. 707.11104 A, an updated drawing that details the correct components, dimensions and connection locations.
2. D00229028 A, a procedure that details the requirements for installation, inspection and load testing of the calibration stand.
3. D00228198 A, a specification that outlines the requirements for all fasteners associated with the calibration stand.
4. D00231531 A, a form for recording monthly inspections of the calibration stand.
AAllll IInndduuccttiioonn CCaalliibbrraattiioonn SSttaannddss iinn uussee MMUUSSTT ccoommppllyy wwiitthh tthhee ssttaannddaarrddss aanndd rreeqquuiirreemmeennttss aass ddooccuummeenntteedd iinn tthhee iitteemmss rreeffeerreenncceedd aabboovvee..
1. All Induction Calibration Stand construction must concur with drawing 707.11104 A. This will ensure all stands in use agree with engineering calculations based on drawing 707.11104 A and meet minimum safety requirements. Stands failing to meet these standards must be taken out of service until they are in compliance.

Halliburton Energy Services
178 ACRt Field Operations Manual D00204472 Rev E
2. Monthly inspections must be performed and documented on all stands in use. A yearly “Load Test” should be performed and documented as well. 3. All stands must be clearly labeled “MAXIMUM RATED CAPACITY: 1000 lbs.”
Lifting Cradle: The new lifting cradle is part of a kit, p/n 101450076 A, that comes with the fiberglass spreader beam and associated hardware, ropes, pulley and straps used to lift the tools. The new design ensures that the load is applied vertically to the upper structural members of the calibration stand. The calibration stand is not designed to handle horizontal (side) loading. The new cradle has seven (7) lifting points spaced equally over a 25 ft length which will allow the cradle to accommodate the various lengths of current and future HES induction tools. Below is a list of equipment and documentation that comes with the lifting cradle kit: 1. 101450083 A, a fiberglass beam that serves as the “spreader beam” used to lift the tools. 2. 101450082 A, fiberglass hardware (bracket) used to construct the lifting cradle. 3. 101450081 A, fiberglass hardware (threaded rod) used to construct the lifting cradle. 4. 101450080 A, fiberglass hardware (nut) used to construct the lifting cradle. 5. 101450084 A, specified rope used to attach cradle to lifting mechanism. 6. 101453636 A, pulley (sheave) used on calibration stand. 7. 101455769 A, slings used to connect the tool to the lifting cradle. 8. D00227301 A, drawing that demonstrates correct assembly of lifting cradle.

Halliburton Energy Services
D00204472 Rev E ACRt Field Operations Manual 179
Diagram 1
Photograph 1: ACRt Sonde being lifted using the new lifting cradle.

Halliburton Energy Services
180 ACRt Field Operations Manual D00204472 Rev E
Photograph 2: ACRt calibration loop in place using the new lifting cradle.
For any questions or concerns, please contact me at any of the following:


Halliburton Energy Services
182 ACRt Field Operations Manual D00204472 Rev E
Phone: 281-871-7249 Cell Phone: 713-702-6810 Fax: 281-871-7285 Internet Address: [email protected]
Brian Carter
Technical Services Houston