
Acoustic Navigation for Mobile Robots Computer System Design Spring 2003.
17
Acoustic Navigation for Mobile Robots Computer System Design Spring 2003
-
date post
18-Dec-2015 -
Category
Documents
-
view
224 -
download
4
Transcript of Acoustic Navigation for Mobile Robots Computer System Design Spring 2003.

Acoustic Navigation for Mobile Robots
Computer System DesignSpring 2003

BackgroundBackground
Microphone arrays have been in use for over 30 years. Array can outperform even the best directional
microphones. Digital conversion increases possibilities of realistic
implementations. Applicable in conference rooms/auditoriums, concerts,
surveillance equipment and robotic designs. Rutgers University developed 380 microphone array
system proving the usefulness of this technique.

Problem StatementProblem Statement
Design an acoustic navigation module with the ability to detect sound in a 360°environment using a microphone array that will allow a mobile robot to perform movement based on sound location.
Design ObjectiveDesign Objective
Develop a printed circuit board interface for the microphone array
Design acoustic fixtures to increase directionality of microphones
Develop algorithms to determine the angle and position of the transmitted sound
Design must be able to detect certain frequency ranges in which the robot will respond differently based on the frequency received.

Existing SolutionsExisting Solutions
Phonotaxis – University of Stirling, Scotland4 microphone array to model female crickets homing in on the
sound of a male cricket
Signal Rectifier – Elliott Sound ProductsDeveloped an LED audio VU meter that uses simple full-wave
rectifier and pre-amplifier hardware circuitry

Existing Solutions (con’t)Existing Solutions (con’t)
Convict Episcopal de Luxembourg, Bouyette GroupSound SensorSound sensor that measures the difference in phase of two audio
signals to determine the source of the soundRobot searches for and advances toward pulsing sounds
Audio Frequency SensorA single microphone implementation that measures the pulses of the
audio signal to determine the frequency

Microphone ArrayMicrophone Array
Implementing 8 microphones, allowing each microphone 45° of coverage.
Electret microphones – best compromise between response, cost, and ease of design.
To increase directionality, we will implement a sound dampening system.

Proposed Hardware Design
Proposed Hardware Design
Interface the Coldfire 8-bit UART 4-bit Signal Resolution 3-bit representation of selected microphone 1-bit to represent filter type Each microphone polled sequentially Clock and counter to perform polling

Proposed Design DiagramProposed Design Diagram

Design ConstraintsDesign Constraints
Cost Size/Weight Compatibility Power Sound Frequency Range Environment Robot Mobility Single Tone Testing Time

Alternative SolutionsAlternative Solutions
Finding single largest amplitudeAnalog comparison and digital comparison
Digital Signal ProcessingBeamformingTime and amplitude differential

Design ValidationDesign Validation
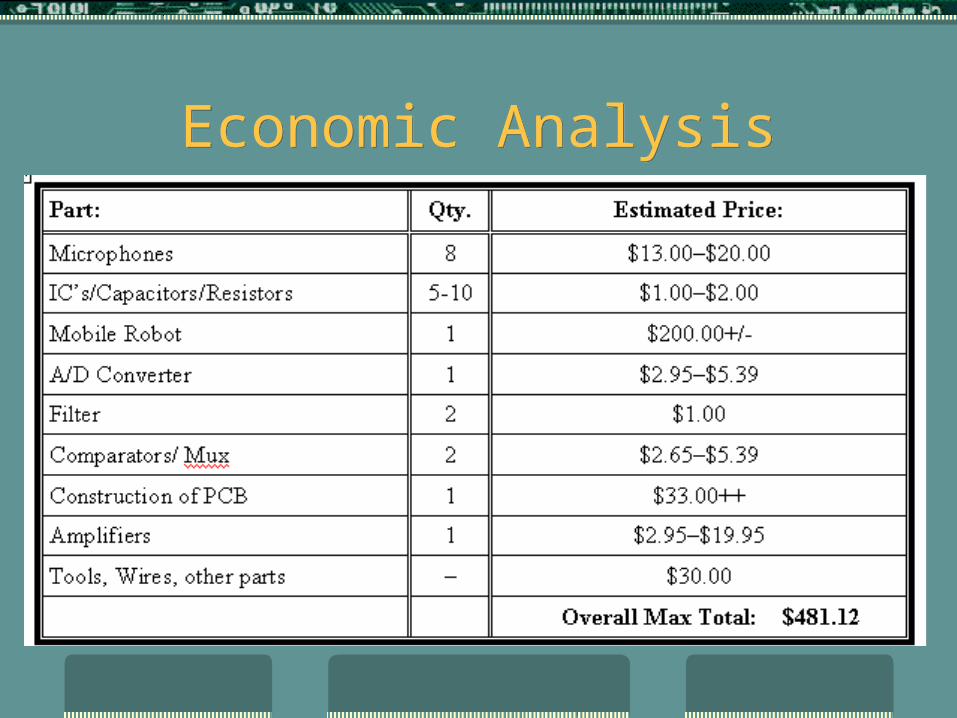
Economic AnalysisEconomic Analysis

Societal, Safety, and Environmental Analysis
Societal, Safety, and Environmental Analysis
Electronics in societyManufacturing process chemicalsCapacitor, resistors, integrated circuit proper
usageWater hazardsProper power and ground sources

ManagementManagement
Trent Foley Lead hardware design engineer, documentation.
Josh Earley Development of mic array, acoustic directionality, board design.
Chris Gonzales Software design, budget, procurement of parts.
Thomas Garner Lead software engineer, board design.

SchedulingScheduling
M 6:15 p.m. (meeting with advisors)
M-W-F 1:30 p.m. - 4:00 p.m. (regular design meetings)
Weekends open (when necessary)



















