ABICに基づくインバージョン解析手法の発展fukahata/Inversion.pdfYukitoshi Fukahata...
37
Yukitoshi Fukahata (Kyoto University) ABICに基づくインバージョン解析手法の発展 Development of the method of inversion analyses using ABIC Bad modelling leads to a bad inversion result. A bad inversion result suggests bad modeling. ѱΠϯόʔδϣϯՌʹԿཧ༝Δ
Transcript of ABICに基づくインバージョン解析手法の発展fukahata/Inversion.pdfYukitoshi Fukahata...
-
Yukitoshi Fukahata (Kyoto University)
ABICに基づくインバージョン解析手法の発展Development of the method of inversion analyses
using ABIC
Bad modelling leads to a bad inversion result.A bad inversion result suggests bad modeling.
-
Contents
Reference: ABICS103-S113 2009
0. Framework of inversion analysis using ABIC
1. More than one sort of prior information[Fukahata et al. 2004, 2003]
2. More than one sort of data (Joint inversion)[Fuuning, Fukahata, Yagi & Parsons 2014]
3. Weak non-linear inversion [Fukahata & Wright 2008]
4. Covariance components due to observation error[Fukahata & Wright 2008]
5. Covariance components due to modeling error-1. Discretization error [Yagi & Fukahata 2008]-2. Errors of Green's function [Yagi & Fukahata 2011]
-
1. Parametric Expansion
u(x,y) = a
klX
k(x)Y
l(y)
l =1
L
∑k =1
m
∑akl: model parameter, u: slip distribution, Xk(x), Yl(y) : basis function
2. Observation Equation
�
d =Ha + e d: data, e: error, e ~ N(0,σ 2E)
3. Prior Information (smoothness condition)
→small
p d | a;σ 2( ) = (2πσ 2 )−n2 E −
12 exp − 1
2σ 2d −Ha( )T E−1 d −Ha( )⎡
⎣⎢
⎤
⎦⎥
�
p(a;ρ2) = (2πρ2)−m2 G
12 exp − 1
2ρ2aTGa
⎡
⎣ ⎢ ⎤
⎦ ⎥
(Based on Yabuki & Matsu'ura, 1992)
Inversion Algorithm Using ABIC for slip inversion (1)
X1 X2
(e.g., Okada, 1985)
∂u ∂x( )2 + ∂u ∂y( )2⎡⎣⎢⎢
⎤
⎦⎥⎥dxdy
XY∫ = aTGa → small
-
4. Bayes' Theorem ) ( (
�
p(a;σ 2,ρ2 |d) = cp(d |a;σ 2)p(a;ρ2)
Given σ 2, α 2, based on maximum likelihood method
5. ABIC Minimum (ABIC: Akaike's Bayesian Information Criterion)
The criterion of ABIC minimum
→ â = HTE−1H + α̂ 2G⎡⎣ ⎤⎦−1HTE−1d
= c 2πσ 2( )−(n+m ) 2 (α 2 )P 2 E −1 2 G 1 2 × exp − 12σ 2
s(a;α 2 )⎡⎣⎢
⎤⎦⎥
s(a;α 2 ) = d −Ha( )T E−1 d −Ha( ) +α 2aTGa (α 2 = σ 2 ρ2 : hyperparameter)with
ABIC σ 2 ,α 2( ) = −2 log p a;σ 2 ,α 2 | d( )da∫ + C→ σ̂ 2,α̂ 2
(Based on Yabuki & Matsu'ura, 1992)Inversion Algorithm Using ABIC for slip inversion (2)
Ĉ = σ̂ 2 (HTE−1H + α̂ 2G)−1
-
Observation eq. Prior information
Bayes Thorem
p(a;σ 2 ,ρ2 |d) = cp(d |a;σ 2 )p(a;ρ2 )= c 2πσ 2( )−(n+m) 2 (α 2 )P 2 E −1 2 G 1 2 × exp − 1
2σ 2s(a;α 2 )
⎡
⎣⎢
⎤
⎦⎥
ABIC(σ 2 ,ρ2 ) ≡ −2log p(a;σ 2 ,ρ2 |d)da∫⎡⎣ ⎤⎦ +C
minimum ABIC Optimal σ 2 ,ρ2
(Akaike 1980)
d =Ha+ e; p(d |a;σ 2 )
s(a) = (d −Ha)TE−1(d −Ha) + σ2
ρ2aTGawith
r = aTGa; p(a;ρ2 )
(hyperparameter)
ABIC enables us to determine the relative weight between observed data and prior information objectively.
-
Observed data: accurate, sufficientthe model that fits to the data
Characteristic of ABIC
Observed data Prior infor.
Observed data: inaccurate, insufficientthe model that follows prior
ABIC
Fukahata, Yagi, &Matsu’ura (2003)
far + near far only
ABIC determines the relative weight based on statistics
-
Extension of inversion methods using ABIC
-
(Fukahata et al., 2004, 2003)
Prior Information
�
∂ 2u(x,t)∂x 2
⎡
⎣ ⎢
⎤
⎦ ⎥ X∫ dxdtT∫ = aTG1a
∂ 2u(x,t)∂ t 2
⎡
⎣ ⎢
⎤
⎦ ⎥ X∫ dxdtT∫ = aTG2a
⎧
⎨ ⎪ ⎪
⎩ ⎪ ⎪
�
p(a;ρ12) = (2π )
−m2 G1ρ12
12exp − 1
2ρ12 a
TG1a⎡
⎣ ⎢
⎤
⎦ ⎥
p(a;ρ22) = (2π )
−m2 G2ρ22
12exp − 1
2ρ22 a
TG2a⎡
⎣ ⎢
⎤
⎦ ⎥
⎧
⎨
⎪ ⎪ ⎪
⎩
⎪ ⎪ ⎪
probability density function
�
p(a;ρ12,ρ2
2) = (2π )−m G1ρ12
12 G2ρ22
12exp − 1
2aT G1
ρ12 +G2ρ22
⎛
⎝ ⎜
⎞
⎠ ⎟ a
⎡
⎣ ⎢
⎤
⎦ ⎥
�
p(a;ρ12,ρ2
2) da ≠1∫ ⇐ P(A∩ B) ≠ P(A)P(B)
�
⇒ p(a;ρ12,ρ2
2) = (2π )−m2 G1ρ12 +G2ρ22
12exp − 1
2aT G1
ρ12 +G2ρ22
⎛
⎝ ⎜
⎞
⎠ ⎟ a
⎡
⎣ ⎢
⎤
⎦ ⎥
�
⇓
(ex, Yoshida, 1989Ide et al. 1996)
CASE1: More than one sort of prior information
-
ground displacement and band-passed from 0.01 to 1.0 Hzand from 0.05 to 0.5 Hz, respectively. In the estimation ofthe source process, we applied a multi-time window inver-sion method [e.g., Ide et al., 1996] to each data set,assuming that the faulting occurred on a single fault planeand that the slip angle was unchanged during the wholerupture process. We adopted the hypocenter (latitude =16.00!N, longitude = 262.98!E, depth = 40 km) determinedby UNAM and the fault mechanism (strike = 300!, dip =49!, slip = !78!) obtained by Yagi et al. [2001]. We took asufficiently broad fault area of 84 km " 60 km, divided into14 " 10 subfaults (Figure 1). The slip-rate function of eachsubfault (6 km " 6 km) is expanded in a series of 7 linearspline functions with an equal time interval of 1.5 sec. Astandard rupture propagation velocity is set to 4.0 km/s,which determines the initial time of the series of 7 basisfunctions at each subfault.[10] For each of the six representative cases we computed
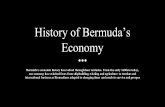
the values of ABIC(a2, b2). The contour maps in the leftcolumn of Figure 2 show the ABIC computed with theproper expression, and those in the right column show theABIC computed with the improper expression. Here, (a), (b)and (c) indicate the three different sets of data. In eachdiagram of the left column we can find a clear globalminimum of ABIC. On the other hand, in the case of theimproper formulation (right column), every diagram hasonly a local minimum of ABIC on a surface monotonouslydecreasing as a2 and b2 approach infinity. So that, the pointof ABIC minimum deviates from the correct point, shownin the corresponding diagram of the left column. The degree
of the deviation depends on the quality and quantity of data.If the data are sufficient (a), the deviation is very littleowing to the steep local minimum. If the data are insuffi-cient (c), on the other hand, the local minimum almostvanishes and the deviation becomes significant. Further-more, the local minimum of ABIC vanishes, if we use only2 teleseismic P-wave records for inversion.[11] Given the values of a2 and b2 which minimize ABIC
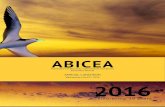
(Figure 2), we can directly compute the optimal values ofthe model parameters a from equation (13). Substituting theoptimal values a * into equation (1), we can reconstruct thefault slip distribution in each case as shown in Figure 3.Note that the six diagrams in Figure 3 are so arranged thatthey correspond to the six cases in Figure 2. From Figure 3we can see that the two different formulations give almostthe same slip distribution in the case (a). In the cases of (b)and (c), on the other hand, the slip distributions invertedwith the improper formulation (right column) are somewhatbiased and oversimplified in comparison with the correctlyinverted slip distributions (left column). Substituting theoptimal values a * into equation (1), we can also reconstructthe moment rate function as shown in Figure 4. From thisfigure we can see that the moment rate function invertedfrom the data set (b) with the improper formulation (right) istoo smooth in comparison with the correctly inverted result(left).[12] In Figure 5 we compare the observed displacement
waveforms (upper trace) at the 15 teleseismic stations withthe waveforms computed from the proper (middle trace) andthe improper (lower trace) inversion results for the case (b).From Figure 5 we can see that the computed waveforms
Figure 1. The locations of the teleseismic stations [IRIS-DMC] (top) and the strong motion seismograph stations[UNAM] (bottom) used in our inversion analysis. Thesurface projection of the hypocenter and the fault plane areindicated by the star and the rectangle with grid lines,respectively.
Figure 2. Contour maps of ABIC(a2, b2) calculated fromthe proper expression (left column) and the improperexpression (right column) for the three different data sets:(a) 15 teleseismic P-wave records from15 IRIS-DMCstationsand 21 strong-motion records from 7 UNAM stations, (b) 15teleseismic P-wave records, and (c) 7 teleseismic P-waverecords. The solid circle in each diagram indicates the point ofABIC minimum.
FUKAHATA ET AL.: WAVEFORM INVERSION USING ABIC 38 - 3
and H is a N ! M coefficient matrix calculated from the slipresponse functions and the basis functions. Assuming aGaussian distribution with zero mean and unknownvariance s2 for the data errors e, we can describe astochastic model which relates the data d with the modelparameters a as
p d a;s2!
!
" #
¼ 2ps2" ##N=2
exp # 12s2
d#Hað ÞT d#Hað Þ$ %
ð3Þ
[6] Now we introduce two different sorts of prior con-straints, smoothness in space and time, represented in thefollowing Gaussian type of probability density functions( pdfs), respectively:
p1 a; r21" #
¼ 2pr21" ##P1=2k!1k1=2 exp #
1
2r21aTG1a
& '
ð4Þ
p2 a; r22" #
¼ 2pr22" ##P2=2k!2k1=2 exp #
1
2r22aTG2a
& '
ð5Þ
Here, G1 and G2 are the M ! M symmetric matrices whichprescribe smoothness constraints in space and time,respectively, r12 and r22 are the unknown parameters whichcontrol the distributions of p1 and p2, respectively, P1 andP2 are the ranks of G1 and G2, respectively, and k!1k andk!2k represent the absolute values of the product of non-zero eigenvalues of G1 and G2, respectively. Simplymultiplying p1(a;r12) and p2(a;r22) together, Yoshida [1989]and Ide et al. [1996] have obtained the following form ofprior pdf:
p0 a; r21; r22
" #
¼ 2pr21" ##P1=2
2pr22" ##P2=2k !1 k1=2k !2 k1=2
& exp #aT( 1
2r21G1 þ
1
2r22G2
& '
a
%
ð6Þ
on the implicit assumption that the two sorts of priorconstraints in equations (4) and (5) are independent witheach other. In usual cases (P1 + P2 > M ), however, theassumption is not satisfied, and so the prior pdf defined byequation (6) can not be normalized correctly:
Z
p0 a; r21; r22
" #
da 6¼ 1 ð7Þ
[7] Equations (4) and (5) mean that we should select themodel with smaller roughness of slip distribution both forspace (r1 = a
TG1a) and time (r2 = aTG2a). So we define a
total roughness of slip distribution as r = r1/r12 + r2/r22. Thenwe can describe the two sorts of prior constraints in a singlepdf form as
p a; r21; r22
" #
¼ 2pð Þ#M=2!
!
!
!
!
!
!
!
1
r21G1 þ
1
r22G2
!
!
!
!
!
!
!
!
1=2
& exp #aT 12r21
G1 þ1
2r22G2
& '
a
$ %
ð8Þ
where kG1/r12 + G2/r22k represents the absolute value of thedeterminant of (G1/r12 + G2/r22), which is usually a full-rankM ! M matrix.[8] We incorporate the prior distribution in equation (8)
with the data distribution in equation (3) by using Bayes’theorem:
p a; s2; r21; r22 dj
" #
¼ cp dja; s2" #
p a; r21; r22
" #
ð9Þ
where c is a normalizing factor independent of the modelparameters a and the hyperparameters s2, r12 and r22. ThenABIC is defined by
ABIC ¼ #2 logZ
p a;s2; r21; r22 dj
" #
da
$ %
þ C ð10Þ
The values of s2, r12 and r22 which minimize the ABIC arechosen as the best estimates of the hyperparameters. Here,we introduce new hyperparameters a2(=s2/r12) and b2(=s2/r22) instead of r12 and r22. Using the proper prior pdf inequation (8), Fukahata et al. [2003] have obtained thefollowing concrete expression of ABIC:
ABIC a2; b2" #
¼ N log s a*ð Þ # log ka2G1 þ b2G2 k
þ log kHTH þ a2G1 þ b2G2k þ C0 ð11Þ
with
s að Þ ¼ d#Hað ÞT d#Hað Þ þ aT a2G1 þ b2G2" #
a ð12Þ
a* ¼ HTH þ a2G1 þ b2G2( )#1
HTd ð13Þ
On the other hand, if we use the improper prior pdf inequation (6), the expression of ABIC becomes
ABIC a2; b2" #
¼ N þ P1 þ P2 #Mð Þ log s a*ð Þ # loga2P1b2P2
þ log kHTH þ a2G1 þ b2G2 k þ C00 ð14Þ
In equations (11) and (14), C0 and C00 are some constantterms independent of a2 and b2. The expression of ABIC inequation (14) has a fatal defect that ABIC decreasesinfinitely as a2 and b2 approach infinity.
3. Application to Actual Data
[9] On September 30, 1999, a large normal-faultingearthquake (Mw = 7.4) occurred in Oaxaca, Mexico. Wetry to estimate the source process of this earthquake byapplying both the proper expression of ABIC in equation(11) and the improper expression of ABIC in equation (14)to the three different data sets: (a) 15 teleseismic P-waverecords from 15 IRIS-DMC stations and 21 strong-motionrecords from 7 UNAM (Universidad Nacional Autonoma deMexico) stations, (b) 15 teleseismic P-wave records from 15IRIS-DMC stations, and (c) 7 teleseismic P-wave recordsfrom 7 IRIS-DMC stations (solid triangles in Figure 1),selected from the viewpoint of azimuthal coverage. Figure 1shows the locations of the seismograph stations. The tele-seismic and strong-motion records were converted into
38 - 2 FUKAHATA ET AL.: WAVEFORM INVERSION USING ABICand H is a N ! M coefficient matrix calculated from the slipresponse functions and the basis functions. Assuming aGaussian distribution with zero mean and unknownvariance s2 for the data errors e, we can describe astochastic model which relates the data d with the modelparameters a as
p d a;s2!
!
" #
¼ 2ps2" ##N=2
exp # 12s2
d#Hað ÞT d#Hað Þ$ %
ð3Þ
[6] Now we introduce two different sorts of prior con-straints, smoothness in space and time, represented in thefollowing Gaussian type of probability density functions( pdfs), respectively:
p1 a; r21" #
¼ 2pr21" ##P1=2k!1k1=2 exp #
1
2r21aTG1a
& '
ð4Þ
p2 a; r22" #
¼ 2pr22" ##P2=2k!2k1=2 exp #
1
2r22aTG2a
& '
ð5Þ
Here, G1 and G2 are the M ! M symmetric matrices whichprescribe smoothness constraints in space and time,respectively, r12 and r22 are the unknown parameters whichcontrol the distributions of p1 and p2, respectively, P1 andP2 are the ranks of G1 and G2, respectively, and k!1k andk!2k represent the absolute values of the product of non-zero eigenvalues of G1 and G2, respectively. Simplymultiplying p1(a;r12) and p2(a;r22) together, Yoshida [1989]and Ide et al. [1996] have obtained the following form ofprior pdf:
p0 a; r21; r22
" #
¼ 2pr21" ##P1=2
2pr22" ##P2=2k !1 k1=2k !2 k1=2
& exp #aT( 1
2r21G1 þ
1
2r22G2
& '
a
%
ð6Þ
on the implicit assumption that the two sorts of priorconstraints in equations (4) and (5) are independent witheach other. In usual cases (P1 + P2 > M ), however, theassumption is not satisfied, and so the prior pdf defined byequation (6) can not be normalized correctly:
Z
p0 a; r21; r22
" #
da 6¼ 1 ð7Þ
[7] Equations (4) and (5) mean that we should select themodel with smaller roughness of slip distribution both forspace (r1 = a
TG1a) and time (r2 = aTG2a). So we define a
total roughness of slip distribution as r = r1/r12 + r2/r22. Thenwe can describe the two sorts of prior constraints in a singlepdf form as
p a; r21; r22
" #
¼ 2pð Þ#M=2!
!
!
!
!
!
!
!
1
r21G1 þ
1
r22G2
!
!
!
!
!
!
!
!
1=2
& exp #aT 12r21
G1 þ1
2r22G2
& '
a
$ %
ð8Þ
where kG1/r12 + G2/r22k represents the absolute value of thedeterminant of (G1/r12 + G2/r22), which is usually a full-rankM ! M matrix.[8] We incorporate the prior distribution in equation (8)
with the data distribution in equation (3) by using Bayes’theorem:
p a; s2; r21; r22 dj
" #
¼ cp dja; s2" #
p a; r21; r22
" #
ð9Þ
where c is a normalizing factor independent of the modelparameters a and the hyperparameters s2, r12 and r22. ThenABIC is defined by
ABIC ¼ #2 logZ
p a;s2; r21; r22 dj
" #
da
$ %
þ C ð10Þ
The values of s2, r12 and r22 which minimize the ABIC arechosen as the best estimates of the hyperparameters. Here,we introduce new hyperparameters a2(=s2/r12) and b2(=s2/r22) instead of r12 and r22. Using the proper prior pdf inequation (8), Fukahata et al. [2003] have obtained thefollowing concrete expression of ABIC:
ABIC a2; b2" #
¼ N log s a*ð Þ # log ka2G1 þ b2G2 k
þ log kHTH þ a2G1 þ b2G2k þ C0 ð11Þ
with
s að Þ ¼ d#Hað ÞT d#Hað Þ þ aT a2G1 þ b2G2" #
a ð12Þ
a* ¼ HTH þ a2G1 þ b2G2( )#1
HTd ð13Þ
On the other hand, if we use the improper prior pdf inequation (6), the expression of ABIC becomes
ABIC a2; b2" #
¼ N þ P1 þ P2 #Mð Þ log s a*ð Þ # loga2P1b2P2
þ log kHTH þ a2G1 þ b2G2 k þ C00 ð14Þ
In equations (11) and (14), C0 and C00 are some constantterms independent of a2 and b2. The expression of ABIC inequation (14) has a fatal defect that ABIC decreasesinfinitely as a2 and b2 approach infinity.
3. Application to Actual Data
[9] On September 30, 1999, a large normal-faultingearthquake (Mw = 7.4) occurred in Oaxaca, Mexico. Wetry to estimate the source process of this earthquake byapplying both the proper expression of ABIC in equation(11) and the improper expression of ABIC in equation (14)to the three different data sets: (a) 15 teleseismic P-waverecords from 15 IRIS-DMC stations and 21 strong-motionrecords from 7 UNAM (Universidad Nacional Autonoma deMexico) stations, (b) 15 teleseismic P-wave records from 15IRIS-DMC stations, and (c) 7 teleseismic P-wave recordsfrom 7 IRIS-DMC stations (solid triangles in Figure 1),selected from the viewpoint of azimuthal coverage. Figure 1shows the locations of the seismograph stations. The tele-seismic and strong-motion records were converted into
38 - 2 FUKAHATA ET AL.: WAVEFORM INVERSION USING ABIC
Expression of ABIC
(α → β → ⇒ ABIC →
"# = %#
&'#, )# = %
#
#
Proper
Improper
ABIC
Fukahata, Yagi & Matsu'ura (2003)
-
Inverted Slip Distribution
Near(21) + Far(15)
Far(15)
Far(7)
Fukahata, Yagi & Matsu'ura (2003)
-
d I = H Ia + e I ,ds = Hsa + es ,
InSAR:
seismic:
d Ids
⎛⎝⎜
⎞⎠⎟=H IHs
⎛⎝⎜
⎞⎠⎟a +
e Ies
⎛⎝⎜
⎞⎠⎟
e I ∼ N(0, σ I2EI )
es ∼ N(0, σ s2Es )
p ds | a;σ s2( ) = (2πσ s2 )−
Ns2 Es
−12 exp − 1
2σ s2 ds −Hsa( )
T Es−1 ds −Hsa( )
⎡
⎣⎢
⎤
⎦⎥
d = Ha + e, e I ∼ N(0, σ I2E)jointσ I2E =
EI 00 η2Es
⎛⎝⎜
⎞⎠⎟
p d | a;σ I2 ,η2( ) = (2πσ I2 )−
N2 E(η2 )
−12 exp − 1
2σ I2 d −Ha( )
T E−1(η2 ) d −Ha( )⎡⎣⎢
⎤
⎦⎥
η2 (= σ s2 σ I
2 ) relative weight of data sets new hyperparameter
CASE2: More than one sort of data (Joint inversion)Expression of observation equation
-
Expression of ABIC
Prior Information: p a;ρ12 ,ρ22( ) = 2π( )−M 2 G1ρ12 +G2ρ22
1 2
exp − 12aT G1
ρ12 +G2ρ22
⎛⎝⎜
⎞⎠⎟a
⎛
⎝⎜⎞
⎠⎟
Bayes' Theorem p a;σ I
2 ,η2 ,ρ12 ,ρ2
2 d( ) = cp d | a;σ I2 ,η2( ) p a;ρ12 ,ρ22( )
Derivation of ABICABIC α 2 ,β 2 ,η2( ) = N log s(a*) − log α 2G1 + β 2G2
+ log HTE−1(η2 )H +α 2G1 + β2G2 + log E(η
2 ) + C
(α 2 = σ I2 ρ1
2 , β 2 = σ I2 ρ2
2 )
(Fukahata et al., 2003, 2004)
ABIC min → optimum values of → aα 2 ,β 2 ,η2
CASE2: Joint inversion
-
Results for
only InSAR data
Slip Distribution
Funning, Fukahata, Yagi & Parsons (2014, GJI)
-
Results for
Seismic Data
-
Result of Joint inversionInSAR
Seismic
Joint
Funning, Fukahata, Yagi & Parsons (2014, GJI)
-
Non-linear
u(x, z;δ ) = aklXk (x)Zl (z)l=1
L
∑k=1
K
∑
Xk (x), Zl (z)
akl
no approximation
�
d = f (a,f) + e
where f : fault parameters (dip, strike, location): slip distribution
: model parameters
: basis functions
The parameters responsible for non-linearity is separatedfrom model parameters a that express slip distribution
(H: matrix)
( : non-linear function)
�
f
CASE3: Weak Non-linear InversionExpression of observation equation
Pseudo linearization d =H(f )a + e
-
Residual sum of squares with prior (smoothness constraint)
cf. s(a;α 2 ) = d −Ha( )T E−1 d −Ha( ) +α 2aTGa
(Yabuki & Matsu'ura, 1992)
α 2 weight between observation and prior
ABIC min
Determination of the non-linear parameters f with ABIC
�
s(a;α2 ,f) = (d−H(f)a)TE−1(d−H(f)a) + α2aTGa
f
: linear case
ABIC min
Non-linear term
Fukahata & Wright (2008, GJI)
In the same way,
-
-2
-1
0
1
log(a
2 )
24 28 32 36 40 44 48dip
Fig. 5
0
2
4
6
8
10
12
Dep
th [
km]
-12 -10 -8 -6 -4 -2 0 2 4 6 8 10 12Strike [km]
0
0
0.2
0.2
0.2
0.4
0.40.6
0.81
1.2
a: slip [m]
NW SE
0
4
8
12-12 -8 -4 0 4 8 12
0.10.1b: error [m]
Fig. 6
-12 -8 -4 0 4 8 12
0.80.6 0.4
c: resolution
Fukahata & Wright (2008, GJI)
20 ABIC2
-
InSAR: one-million data
How should we sample and invert such data?
We have nominally continuous observed data
seismic data
2.8
0
l.o.s
. cm
5 kmN38
o0
'N
38
o1
0'
E29o55' E30o0' E30o5'
N3
8o5
'
E30o10'
Wright et al. (1999)
4. Covariance components due to observation error
-
0
2
4
6
8
10
12
Dep
th [
km]
-12 -10 -8 -6 -4 -2 0 2 4 6 8 10 12Strike [km]
0
0.2
0.2
0.2
0.4
0.4
0.6
0.8
1
NW SE
(a)
0
2
4
6
8
10
12
Dep
th [
km]
-1.6
-1.6
-1.2
-1.2
-0.8
-0.8
-0.8
-0.4 -0.4
-0.4
-0.4
0
0
0
0 0
0.4
0.4
0.4
0.4
0.4
0.8
0.8
0.8
0.8
0.81.2
1.2
1.2
1.2
1.6
1.6
1.6
2
2
2
2.4
2.4
2.83.2
(b)
Fig. 9
An inverted result
Slip distribution of Dinar earthquakevery unstable!
I reviewed the computation program,tried various settings, etc,but the situation didn’t improve.
-
0
2
4
6
8
10
12
Dep
th [
km]
-12 -10 -8 -6 -4 -2 0 2 4 6 8 10 12Strike [km]
0
0.2
0.2
0.2
0.4
0.4
0.6
0.8
1
NW SE
(a)
0
2
4
6
8
10
12
Dep
th [
km]
-1.6
-1.6
-1.2
-1.2
-0.8
-0.8
-0.8
-0.4 -0.4
-0.4
-0.4
0
0
0
0 0
0.4
0.4
0.4
0.4
0.4
0.8
0.8
0.8
0.8
0.81.2
1.2
1.2
1.2
1.6
1.6
1.6
2
2
2
2.4
2.4
2.83.2
(b)
Fig. 9
An inverted result
Slip distribution of Dinar earthquakevery unstable!
Observed data Prior infor.
ABIC Overfitting seemed to occur.
-
Observation Eq. d =Ha+ e, e ~ N (0,σ 2E)
Eij = exp − rij s( )rij distance between data i and j s : typical correlation length (~10km)
2.8
0l.o
.s. c
m
5 kmN38o
0'N
38o 1
0'
E29o55' E30o0' E30o5'
N38
o 5'
E30o10'
s(a;α 2 ) = d −Ha( )T E−1 d −Ha( )+α 2aTGasquare of residual smoothness
E = I
At a coffee time, July 2005me “I wonder 100 m might be too short
for the correlation distance.”Tim “Yes, it’s about ten kilometer”me “Oh, really?”
-
0
2
4
6
8
10
12
Dep
th [
km]
-12 -10 -8 -6 -4 -2 0 2 4 6 8 10 12Strike [km]
0
0.2
0.2
0.2
0.4
0.4
0.6
0.8
1
NW SE
(a)
0
2
4
6
8
10
12D
epth
[km
]
-1.6
-1.6
-1.2
-1.2
-0.8
-0.8
-0.8
-0.4 -0.4
-0.4
-0.4
0
0
0
0 0
0.4
0.4
0.4
0.4
0.4
0.8
0.8
0.8
0.8
0.81.2
1.2
1.2
1.2
1.6
1.6
1.6
2
2
2
2.4
2.4
2.83.2
(b)
Fig. 9
Introduction ofcovariance ofobservation errors 0
2
4
6
8
10
12
Dep
th [
km]-12 -10 -8 -6 -4 -2 0 2 4 6 8 10 12
Strike [km]
-0.4
-0.4
-0.2
-0.2
0
0
0
0
0
0.2
0.2
0.2
0.40.4
0.4
0.6
0.6
0.6
0.60.8
0.8
0.8
1
1
1
1.2
1.2
1.2
1.4
1.4
a: slip [m]
NW SE
0
4
8
12-12 -8 -4 0 4 8 12
0.1
0.1
0.20.2
b: error [m]
Fig. 7
-12 -8 -4 0 4 8 12
0.60.8
c: resolution
Fukahata & Wright (2008)
Important lesson: Bad modelling leads to a bad result.A bad result strongly suggests bad modelling.
-
It was possible to manually adjust the hyperparameter to obtain a good-looking result. But, if I did so, probably I didn’t realize the importance of covariance components.
Another important lesson
The hyperparameters should be determined statistically (objectively).
-
reasonableTibet, Manyi earthquake (Mw 7.6) (by Yagi on behalf of G. Funning)
For the case of waveform inversion
0Dip
(km
) -20 0 20 40 60 80 100 120 140Strike (km)
0.001.773.545.317.088.85
10.6212.3914.1615.9317.70
(m)
0
5
10
15
(e18
Nm
/s)
0 20 40 60Time (s)
!"#$%!&'()!*+,-.!+)/%0122345678!'9::;:1
%?-)@?*A)@BCDC
-
But if we densely sample, data include common error.
Mathematically, covariance matrix E becomes
�
E =σ 2 0 0
0 σ 2 00 0 σ 2
⎛
⎝
⎜ ⎜
⎞
⎠
⎟ ⎟
Waveform data are basically accurate,so observation errors are small.
σ 2 * ! 0* σ 2 * *! * " *0 * * σ 2
⎛
⎝
⎜⎜⎜⎜
⎞
⎠
⎟⎟⎟⎟
u(x,t) = akl X k (x)Tl (t)l∑
k∑ +δu(x,t)
We introduced modeling error (discretization error), which leads to covariance components.
(Yagi & Fukahata, 2008)Xk (x),Tl (t) : Basis functions
-
Introduction of covariance components due to modeling error(discretization error) (Yagi & Fukahata, 2008)
�
u(τ) = akTk (τ )k=1
K
∑ + δu(τ)discretization error
�
di (t) = Gi (t;τ)u(τ)dτs∫
�
eidiscre (t) = Gi (t;τ )δu(τ)dτs∫
Relation between data and model
Expression of the error in the observation eq.
Following the law of propagation of errors,covariance components emerge.
t
�
δup
t
When parameterizing the problem, discretization error inevitably emerges
Tk(t) : basis function
-
0.00
0.29
0.58
0.87
1.16
1.45
1.74
2.03
2.32
2.61
2.90(m)
10Hz
5Hz
2Hz
1Hz
-40 -30 -20 -10 0 10 20 30
Strike (km)
Dip
(km
)
-10
0
Figure 3
New Formulation Traditional Formulation
10Hz
5Hz
2Hz
1Hz
(Yagi & Fukahata, 2008)
With Covariance Conventional (Without Covariance)
-
Reproduction of high frequency components
New Conventional
Note that the residual mean square is less in the conventional
-
(a) New Formulation
(b) Conventional Formulation with NNLS
0 10 20 30 40 50
Slip (m)
, Fukahata et al.
0
50
Dip
(km
)
0 50 100 150 200 250 300
Strike (km)
(c) Conventional Formulation without NNLS
Fukahata, Yagi & Mitsui (2012)
N S
Another Example of unrealistic result
Tohoku-oki (M9.0), 2011
Large negative & strike slips
which also tells us something is wrong in the inversion scheme
(We should be very careful to apply non-negative condition)
5-2. Covariance due to uncertainty of Green's function
-
Non-negative condition is commonly considered to be physically reasonable. However, the non-negative condition always leads to biased estimates, i.e.,
E u(x)( ) = 0 E u(x)( ) > 0
non-negative
“Unbiased” is one of the most important criterion in statistical inference.
E: expectationu: slipx: a far distancefrom the source
-
without Non-Negative Condition (LLS)
with Non-Negative Condition (NLLS)
[Max slip]
5.0 m
2.5 m
Yagi & Fukahata(2014, SSJ)
-
Introduction of uncertainty of Green's function
Observation equation : d =Ga+ eobs
New error term
Introduction of uncertainty of Green's function
is assumed to be Gaussian for simplicity.
e = eobs + emodel(Yagi & Fukahata, 2011; GJI)
d = (G +δG)a+ eobs
d =Ga+ (δGa+ eobs )
δG
-
(a) New Formulation
(b) Conventional Formulation with NNLS
0 10 20 30 40 50
Slip (m)
, Fukahata et al.
0
50
Dip
(km
)
0 50 100 150 200 250 300
Strike (km)
(c) Conventional Formulation without NNLS
Non-negative(without error of Green's function)
(a) New Formulation
(b) Conventional Formulation with NNLS
0 10 20 30 40 50
Slip (m)
, Fukahata et al.
0
50D
ip (k
m)
0 50 100 150 200 250 300
Strike (km)
(c) Conventional Formulation without NNLS
(a) New Formulation
(b) Conventional Formulation with NNLS
0 10 20 30 40 50
Slip (m)
, Fukahata et al.
0
50
Dip
(km
)
0 50 100 150 200 250 300
Strike (km)
(c) Conventional Formulation without NNLS
Slip Distributionof Tohoku eq.
Conventional
New (with error of Green's function)
likely to beartificial
-
Inversion results of the Tohoku-oki earthquake
-
0
4
8
12
16
Dep
th [
km]
-20 -16 -12 -8 -4 0 4 8 12 16 20
Futagawa (1 fault model)
0.511.5
2
2.533.5
4
4.55
[km]
(a) slip [m]
NE SW
0481216
Dep
th [
km]
-20 -16 -12 -8 -4 0 4 8 12 16 20(b) Dip Slip
-0.75
-0.5-0.25-0.5
11.52
2.5
-20 -16 -12 -8 -4 0 4 8 12 16 20(c) Strike Slip
3.54
0481216
Dep
th [
km]
-20 -16 -12 -8 -4 0 4 8 12 16 20(d) Dip Slip (2 fault model)
-0.75-0.5-0.25
0
-0.5
0
11.52
2.5
-20 -16 -12 -8 -4 0 4 8 12 16 20(e) Strike Slip (2 fault model)
0.53.54
Fig. 6
1 Fault Model
Negative slip diminishes!
2016 Kumamoto earthquake
130.4˚
130.4˚
130.6˚
130.6˚
130.8˚
130.8˚
131˚
131˚
131.2˚
131.2˚
131.4˚
131.4˚
32.4˚
32.6˚
32.8˚
33˚
33.2˚
Fig. 2
(a)
130.4˚
130.4˚
130.6˚
130.6˚
130.8˚
130.8˚
131˚
131˚
131.2˚
131.2˚
131.4˚
131.4˚
32.4˚
32.6˚
32.8˚
33˚
33.2˚(b)
2 Faults Model
130.4˚
130.4˚
130.6˚
130.6˚
130.8˚
130.8˚
131˚
131˚
131.2˚
131.2˚
131.4˚
131.4˚
131.6˚
131.6˚
32.6˚ 32.6˚
32.8˚ 32.8˚
33˚ 33˚
33.2˚ 33.2˚
130.4˚
130.4˚
130.6˚
130.6˚
130.8˚
130.8˚
131˚
131˚
131.2˚
131.2˚
131.4˚
131.4˚
131.6˚
131.6˚
32.6˚ 32.6˚
32.8˚ 32.8˚
33˚ 33˚
33.2˚ 33.2˚
Error due to setting of a fault model
Fukahata & Hashimoto (2016, EPS)
-
Summary
“Bad modelling leads to a bad result.A bad result suggests bad modelling.”