
aba_sem.67
324
1 von 324 Universität Karlsruhe (TH) Rechenzentrum Einführung in ABAQUS 6.7 Paul Weber 4. April 2008
-
Upload
ellig1871638 -
Category
Documents
-
view
98 -
download
1
Transcript of aba_sem.67

1 von 324 Universität Karlsruhe (TH)Rechenzentrum
Einführungin
ABAQUS 6.7
Paul Weber4. April 2008

2 von 324 Universität Karlsruhe (TH)Rechenzentrum
ABAQUS Dokumentation
Alle Handbücher liegen online und als PDF-Dokument vor:
ABAQUS Analysis User’s Manual,Vol. I - V
Beschreibung von ABAQUS
ABAQUS Keywords Manual, Vol. I, II
komplette, alphabetische Liste der ABAQUS-Kommandos
ABAQUS Theory Manualdie theoretischen Grundlagen von ABAQUS
ABAQUS Example Problems ManualBeispieldatensätze, liegen auch als Datei vor
ABAQUS Verification ManualVerifikationsdaten zum Testen der diversen ABAQUS Features, liegen auch als Dateien vor
ABAQUS User Subroutine Reference Manual

3 von 324 Universität Karlsruhe (TH)Rechenzentrum
ABAQUS Dokumentation
ABAQUS Benchmarks ManualBenchmarkprobleme zur Performanceanalyse von ABAQUS, nur onlineABAQUS/CAE User’s ManualBeschreibung des interaktiven Prä- und PostprozessorsABAQUS Scripting User’s ManualEinführung und Beschreibung in die ABAQUS Skriptsprache Python, nur onlineABAQUS Scripting Reference ManualPhyton Kommandos, nur online

4 von 324 Universität Karlsruhe (TH)Rechenzentrum
Spezielle Unterlagen
Getting Started with ABAQUS
Eine Einführung in ABAQUS mit Beispielen; einige Beispiele und Aspekte des Kurses sind hieraus und aus dem ABAQUS/Standard Examples Manual entnommen.
Die folgenden Unterlagen enthalten die Folien des entsprechenden offiziellen Kurses, der von ABAQUS durchgeführt wird:
Introduction to ABAQUS/CAE
Contact in ABAQUS/Standard
Writing UMATs, VMATs and UELs
Metal Inelasticity
Wärmeleitung und Wärmespannungen mit ABAQUS
Konvergente Lösungen

5 von 324 Universität Karlsruhe (TH)Rechenzentrum
Organisation des ABAQUS User’s Manual
Volume I
• IntroductionKurzeinführung in ABAQUS, Syntax und Konventionen
• Spatial ModelingModellierung von Knoten, Elementen und Flächen
• Execution ProceduresBeschreibung des ABAQUS-Aufrufs und der verschiedenen Utilities mit den möglichen Optionen
• OutputBeschreibung der verschiedenen Ausgabedateien, die von ABAQUS geschrieben werden können, Ausgabe der verschiedenen Ergebnisse und Kontrollinformationen, Liste aller Ausgabegrößen
• File Output FormatStruktur der Ergebnisdateien, Utilities zum Zugriff auf die Ergebnisdatei

6 von 324 Universität Karlsruhe (TH)Rechenzentrum
Volume II
• Analysis Procedures, Solution and ControlProblemlösungen mit ABAQUS
• Analysis TechniquesVerschiedene Lösungtechniken, u.a. Restart, Substrukturtechnik, Bruchmechanik, Hydrostatik, Parameterstudien, Design Sensitivitätsanalysen, etc.
Volume III
• Materials: IntroductionAllgemeine Beschreibung der ABAQUS-Stoffgesetze
• Elastic Mechanical PropertiesElastische Stoffgesetze in ABAQUS
• Inelastic Mechanical PropertiesInelastische Stoffgesetze in ABAQUS, Versagen und Zerstörung verschiedener Materialien

7 von 324 Universität Karlsruhe (TH)Rechenzentrum
• Other Material PropertiesAndere Materialeigenschaften wie Wärmeleitung, Diffusion, akustische Eigenschaften, u.v.m.
Volume IV
• Elements: IntroductionAllgemeine Beschreibung der Elemente, Auswahlkriterien und Formulierungen
• Continuum ElementsBeschreibung der 1D-Linkelemente, 2D-Elemente für den ebenen Spannungs- und Dehnungszustand, 3D-Solidelemente, axialsymmetrische Kontinuumselemente und infinite Elemente
• Structural ElementsStab-, Balken-, Membran- und Schalenelemente
• Inertial, Rigid and Capacitance Elements• Connector Elements• Special-Purpose Elements
u.a. hydrostatische Fluidelemente

8 von 324 Universität Karlsruhe (TH)Rechenzentrum
Volume V
• Prescribed ConditionsAnfangs- und Randbedingungen, Lastfälle, Amplituden etc
• Constraints• Defining Contact Interactions• Contact Property Models• Contact Elements in ABAQUS/Standard• Defining Cavity Radiation in ABAQUS/Standard

9 von 324 Universität Karlsruhe (TH)Rechenzentrum
FE-Literatur
Dies ist eine rein persönliche Auswahl:
• O.C. Zienkiewicz, R.L. TaylorThe Finite Element Method, 3 Bände
• K.J. BatheFinite-Elemente-Methoden, Springer
• K. Knothe, H. WesselsFinite Elemente, Springer
• H.R. SchwarzMethode der Finiten Elemente, Teubner
• NAFEMS A Finite Element PrimerPublikationen: A Finite Element Dynamics Primer
Introduction to Nonlinear Finite Element Analysis

10 von 324 Universität Karlsruhe (TH)Rechenzentrum
Literatur und Informationen
• http://www.rz.uni-karlsruhe.de/produkte/
Zugang u.a. zu den Seiten der CAE-Programme, die am RZ bereitgestellt werden.
• http://www.rz.uni-karlsruhe.de/produkte/abaqus.php
ABAQUS-Seite

11 von 324 Universität Karlsruhe (TH)Rechenzentrum
Weitere Informationen
im WWW: http://www.nafems.orghttp://www.ansys.comhttp://www.mscsoftware.comhttp://www.simulia.comhttp://www.adina.com
verschiedene sci.engr.mechNews-Groups: sci.engr.civil
sci.engr.analysissci.mech.fluidssci.physics.computational.fluid-dynamics

12 von 324 Universität Karlsruhe (TH)Rechenzentrum
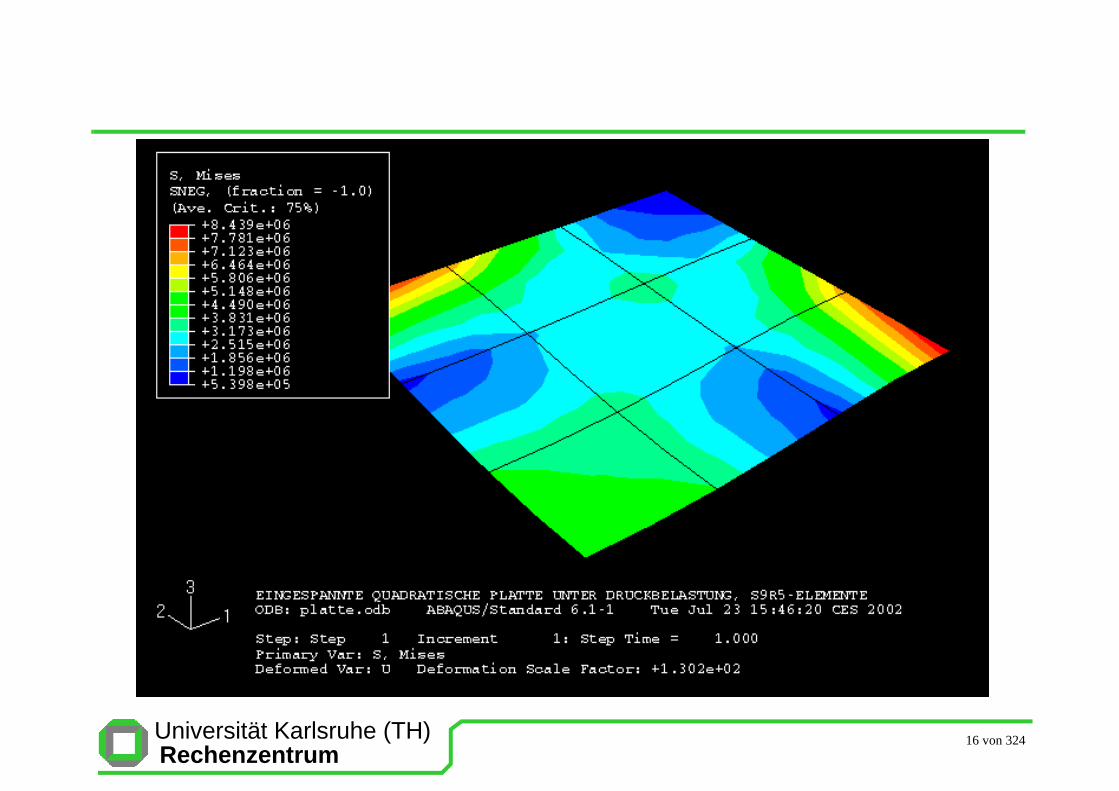
1. Beispiel: Eingespannte Platte
An allen 4 Seiten fest eingespannte quadratische Platte unter gleichmäßigem Druck. Wegen der Symmetrie wird nur ein Viertel der Platte modelliert.
ModelldatenE-Modul: 2.1· 1011 N/m2
Poisson-Zahl: 0.3Kantenlänge: 1.8 mDicke: 0.01 mDruck: 103 N/m2

13 von 324 Universität Karlsruhe (TH)Rechenzentrum
*HEADINGEINGESPANNTE QUADRATISCHE PLATTE UNTER DRUCKBELASTUNG, S9R5-ELEMENTE** M O D E L L D A T E N*NODE17,.9*NGEN1,7,1*NSET,NSET=UNTEN,GENERATE1,7,1*NCOPY,CHANGE NUMBER=60,OLDSET=UNTEN,SHIFT,NEWSET=OBEN0.0,0.9,0.0
*NFILLUNTEN,OBEN,6,10*NSET,NSET=LINKS,GENERATE1,61,10*NSET,NSET=RECHTS,GENERATE7,67,10*ELEMENT,TYPE=S9R51,1,3,23,21,2,13,22,11,12
Leerzeile

14 von 324 Universität Karlsruhe (TH)Rechenzentrum
*ELGEN1,3,2,1,3,20,3*ELSET,ELSET=PLATTE,GENERATE1,9,1*SHELL SECTION,MATERIAL=METALL,ELSET=PLATTE0.01*MATERIAL,NAME=METALL*ELASTIC,TYPE=ISO2.1E11,0.3*BOUNDARYOBEN,1,6RECHTS,1,6UNTEN,YSYMMLINKS,XSYMM** B E L A S T U N G S G E S C H I C H T E*STEP*STATIC*DLOADPLATTE,P,-1.E3*NODE PRINTU*ENDSTEP

15 von 324 Universität Karlsruhe (TH)Rechenzentrum
fest
symmetrisch
symmetrisch
fest
16 von 324 Universität Karlsruhe (TH)Rechenzentrum

17 von 324 Universität Karlsruhe (TH)Rechenzentrum
Erzeugung der Modelldaten
Aufgabe• Definition der Knoten• Vernetzung• Festlegung der Elemente und deren Eigenschaften• Stoffgesetze• Randbedingungen
Werkzeuge• ABAQUS-Optionen (*NODE, *ELGEN, ...), mit Texteditor erstellen• ABAQUS/CAE• HyperMesh• MSC.Patran

18 von 324 Universität Karlsruhe (TH)Rechenzentrum
HyperMesh und sind interaktive Prä- und Postprozessoren mitMSC.Patran Schnittstellen zu verschiedenen FE-Programmen
ABAQUS/CAE ist der ABAQUS Prä- und Postprozessor, mit demABAQUS Modelle erzeugt und die Ergebnisse grafischdargestellt werden können.

19 von 324 Universität Karlsruhe (TH)Rechenzentrum
Belastungsgeschichte
• Eingabe der Belastungsgeschichte in einzelnen Schritten (Steps)
• Eingabeblöcke zwischen *STEP und *ENDSTEP
• Eingabe der Analyseart (Prozedur) für jeden Schritt, z.B. *STATIC, *DYNAMIC
• Eingabe externer Lasten und vorgeschriebener Verschiebungen
• Aufteilung eines Schrittes in Inkremente (im nichtlinearen Fall)
• Auswahl der auszugebenden Größen;z.B. Drucken von Knotenvariablen *NODE PRINT oderElementvariablen *ELEMENT PRINT

20 von 324 Universität Karlsruhe (TH)Rechenzentrum
Dateien in ABAQUS
id ist ein Identifier, der beim ABAQUS-Aufruf als Job-Parameter verwendet wird.
id.dat Druckausgabedatei
id.f User FORTRAN-Subroutine
id.fil Ergebnisdatei(*EL FILE, *NODE FILE, *ENERGY FILE);wird benötigt für Postprocessing mit HyperMesh und MSC.Patran undandere Postprozessoren; Auswertung mit selbstgeschriebenenProgrammen
id.fin Ergebnisdatei in ASCII-Format (*FILE FORMAT)
id.inp ABAQUS Eingabedatei
id.msg Message File; enthält detailierte Informationenüber den Ablauf der Prozeduren
id.odb Output Database File

21 von 324 Universität Karlsruhe (TH)Rechenzentrum
id.mdl Model File
id.stt State File
id.prt Part File
id.res Restart File
id.sta Status File; Information über die Inkremente
id.log Log-File
id.com Python-Skript, das die Durchführung des ABAQUS-Laufs steuert
id.023 Kommunikationsfile (meist temporär)
id.sdb Sparse Solver Database (meist temporär)
werden für Restarts benötigt

22 von 324 Universität Karlsruhe (TH)Rechenzentrum
Datenfluß
Die Dateien id.dat, id.sta, id.log, id.msg, id.com, id.mdl, id.stt, id.prt werden ohne besondere Anforderung immer erzeugt.
id.inp
Input Fileoldid.res
*RESTART,READ Eingabe-INPUT-Optionen
Standardid.fil
id.res
*EL FILE*NODE FILE*ENERGY FILE
*RESTART,WRITE
dateien
*INCLUDE
id.odb *OUTPUT
Prozessor
Analysis
oldid.mdloldid.sttoldid.prt

23 von 324 Universität Karlsruhe (TH)Rechenzentrum
Jobstruktur
id.inp
pre.x
id.023
standard.x
pre.x
id.inp
id.023 id.f
Compile-Load
id.x

24 von 324 Universität Karlsruhe (TH)Rechenzentrum
Struktur der Eingabedatei
Variable Namen und Beispiele sind in dem folgenden Muster kursiv angegeben. Die farbig markierten Namen stellen Bezüge zueinander dar.
*HEADING Headerzeile zur EINGESPANNTE QUADRATISCHE Kommentierung des PLATTE UNTER DRUCKBELASTUNG Modells S9R5-ELEMENTE
** Kommentarzeile
*RESTART, ... Schreiben und/oderLesen einer Restartdatei
*NODE,NSET=SEITE Eingabe der Knoten 1 7,.9 ...
*ELEMENT,TYPE=S9R5,ELSET=PLATTE Eingabe der Elemente 1,1,3,23,21,2,13,22,11,12
...

25 von 324 Universität Karlsruhe (TH)Rechenzentrum
*SHELL SECTION,MATERIAL=STAHL, Elementeigenschaften, ELSET=PLATTE Zuordnung eines 0.01 Materials
*MATERIAL,NAME=STAHL Materialspezifikation
*ELASTIC,TYPE=ISO 2.1E11,0.3
*BOUNDARY feste Randbedingungen
...
*STEP 1. Lastfall
*STATIC statische Prozedur
...
*CLOAD konzentrierte Kraft auf
... einzelne Knoten

26 von 324 Universität Karlsruhe (TH)Rechenzentrum
*NODE PRINT,NSET=SEITE Drucken der U Verschiebungen der
Knoten des Sets mitNamen SEITE
*ENDSTEP Ende des 1. Lastfalls
*STEP,NLGEOM 2. Lastfall
*DYNAMIC dynamische Prozedur
*BOUNDARY vorgeschriebeneVerschiebungen
...
*DLOAD Druck auf die Schalen-PLATTE,P,-1.E3 elemente im Set PLATTE
*ENDSTEP Ende des 2. Lastfalls

27 von 324 Universität Karlsruhe (TH)Rechenzentrum
Allgemeine Eingabeoptionen
*HEADINGbeliebige Anzahl von Zeilen
Die 1. Zeile wird in den Kopf auf jeder Seite des Outputs gedruckt.
** Text bis zur Spalte 80.
Leitet eine Kommentarzeile ein
*INCLUDE,INPUT=Datei-Name
An der Stelle, wo die INCLUDE-Option im Eingabedeck steht, wird der Inhalt der Datei eingefügt.

28 von 324 Universität Karlsruhe (TH)Rechenzentrum
Struktur der ABAQUS Ausgabedatei
Die Ausgabe von ABAQUS-Pre wird durch die *PREPRINT Option gesteuert:
*PREPRINT[,ECHO={YES,NO}][,MODEL={YES,NO}][, HISTORY={YES,NO}][,CONTACT={YES,NO}]
Für jeden Parameter, der auf YES gesetzt ist, wird die entsprechende Information ausgedruckt.
ABAQUS-PRE• ABAQUS Input Echo ECHO=YES
• Bearbeitete Eingabekommandos (Options being processed),hier stehen ggf. Eingabefehlermeldungen
• ElementdefinitionNummer, Typ, Eigenschaftsnummer, Knotennummer
• Beschreibung der Sektionen,hier werden die Elementeigenschaften beschrieben
• Materialbeschreibung

29 von 324 Universität Karlsruhe (TH)Rechenzentrum
• Knotengruppen (NODESET)Knotennummer, Koordinaten, Symmetrien, Randbedingungen
• Elementgruppen MODEL=YES
• Status der Kontaktpaare CONTACT=YES
• Beschreibung der StepsSteuerparameter, Ausgabebeschreibung für Element- und Knotenresultate, Plotbeschreibung, Lasten, Randbedingungen
• Angaben über die Problemgröße HISTORY=YES
Diese Ausgabeinformationen sind wichtig bei der Modellentwicklung. Ist das Modell fehlerfrei, können alle Parameter auf NO gesetzt werden, um die Größe der Datei id.dat möglichst klein zu halten.
30 von 324 Universität Karlsruhe (TH)Rechenzentrum
ABAQUS-Standard
Die Ausgabe von ABAQUS-Standard wird im wesentlichen durch die Ergebnisausgabeanforderungen bestimmt.
Pro Step
werden ausgegeben• Informationen über den Speicherbedarf des Steps und Größe der temporären
Dateien• Protokoll der Prozedur• Tabelle mit den Elementresultaten• Tabelle mit den Knotenresultaten• Zusammenfassung

31 von 324 Universität Karlsruhe (TH)Rechenzentrum
Konventionen

32 von 324 Universität Karlsruhe (TH)Rechenzentrum
Freiheitsgrade
Je nach Elementwahl werden an den Knoten Freiheitsgrade aktiv. Sie werden in ABAQUS durch Nummern angesprochen.
1 Verschiebung in x-Richtung
2 Verschiebung in y-Richtung
3 Verschiebung in z-Richtung
4 Rotation um die x-Achse
5 Rotation um die y-Achse
6 Rotation um die z-Achse
7 Verwölbungsamplitude bei Balken mit offenem Querschnitt
8 Druck bei Sickerströmung (Pore Pressure)
9 Elektrisches Potential
Winkel im Bogenmaß

33 von 324 Universität Karlsruhe (TH)Rechenzentrum
11 Temperatur
12 2. Temperatur (bei Schalen und Balken)
13 3. Temperatur (bei Schalen und Balken)
. . .
Bei axialsymmetrischen Elementen haben einige Freiheitsgrade eine andere Bedeutung:
1 Verschiebung in r-Richtung
2 Verschiebung in z-Richtung
5 Rotation um die z-Ache bei Elementen mit Twist
6 Rotation in rz-Ebene

34 von 324 Universität Karlsruhe (TH)Rechenzentrum
Koordinatensysteme
Standard: globales kartesisches System
lokale Systeme
• zur Eingabeerleichterung von Knotenkoordinaten:*NODE, *NGEN, *SYSTEM
• zur Ausgabe von Knotenvariablen (Verschiebungen, Geschwindigkeiten,...), konzentrierten Kräften und Randbedingungen:
*TRANSFORM
• zur Spezifikation von Materialkoordinatensystemen und lokalen Elementsystemen:*ORIENTATION

35 von 324 Universität Karlsruhe (TH)Rechenzentrum
SYSTEM
Spezifikation eines lokalen Koordinatensystems, in dem Knoten definiert werden (*NODE,*NGEN).*SYSTEM
XA,YA,ZA,XB,YB,ZB
XC,YC,ZC
Bemerkungen• Die Datenzeilen geben die Koordinaten der
Punkte a,b,c im globalen System an.• Falls nur Koordinaten für a angegeben
werden, liegt eine reine Translation vor.• Falls die Z’-Achse parallel zur Z-Achse ist,
müssen nur a und b angegeben. Die 2.Datzenzeile kann wegfallen.
• Wird keine Datenkarte angegeben, wird indas globale System umgeschaltet. X
Y
Z
X'
Y'
Z'
a
b
c

36 von 324 Universität Karlsruhe (TH)Rechenzentrum
TRANSFORM
Das TRANSFORM-Kommando ordnet Knoten ein mitgehendes Koordinatensystem zu, das gegenüber dem globalen System gedreht ist. Koordinaten werden auf das lokale System bezogen• bei der Eingabe von konzentrierten Kräften und Momenten• bei der Eingabe von Verschiebungs- und Rotationsrandbedingungen• bei der Ausgabe von vektorwertigen Knotenvariablen (Verschiebungen,
Geschwindigkeiten, ...); Steuerung in *NODE PRINT und *NODE FILE *TRANSFORM,NSET=Set-Name[,TYPE={R|C|S}]
XA,YA,ZA,XB,YB,ZB
Bemerkungen• Der TYPE-Parameter gibt an, ob es sich um ein kartesisches (R, Default),
zylindrisches (C) oder sphärisches System (S) handelt.• Die Datenzeile gibt die Koordinaten zweier Punkte a und b im globalen System an,
deren Bedeutung vom TYPE-Parameter abhängt.

37 von 324 Universität Karlsruhe (TH)Rechenzentrum
Type=R
Type=C
x'=radialy'=tangential
Type=S
x'=radialy'=Umfangsrichtungz'=meridian
x
y
zx'
y'
z'a
b
z
b
a
x'
y'
z'
x
y
x
y
z
x'
y'
z'
a
b

38 von 324 Universität Karlsruhe (TH)Rechenzentrum
ORIENTATION
Mit der *ORIENTATION Option wird ein Koordinatensystem definiert, das über einen Namen in der *SOLID SECTION oder *SHELL SECTION zur Festlegung eines lokalen Systems referiert werden kann. Dieses System kann als Materialkoordinatensystem und als Ausgabesystem für Spannungen, Kräfte, Dehnungen etc. benutzt werden.ohne Angabe einer Orientierung
Kontinuumselemente: globales SystemSchalen und Balken: lokales System
mit Angabe einer Orientierung
Kontinuumselemente: mitgehendes lokales SystemSchalenelemente: mitgehendes lokales System;
Normale muß eine der lokalen Achsen sein*ORIENTATION,NAME=Systemname[,DEFINITION=Systemdefinition][,SYSTEM=Systemtyp]
ORIENTATION
Mit der *ORIENTATION Option wird ein Koordinatensystem definiert, das über einen Namen in der *SOLID SECTION oder *SHELL SECTION zur Festlegung eines lokalen Systems referiert werden kann. Dieses System kann als Materialkoordinatensystem und als Ausgabesystem für Spannungen, Kräfte, Dehnungen etc. benutzt werden.ohne Angabe einer Orientierung
Kontinuumselemente: globales SystemSchalen und Balken: lokales System
mit Angabe einer Orientierung
Kontinuumselemente: mitgehendes lokales SystemSchalenelemente: mitgehendes lokales System;
Normale muß eine der lokalen Achsen sein*ORIENTATION,NAME=Systemname[,DEFINITION=Systemdefinition][,SYSTEM=Systemtyp]

39 von 324 Universität Karlsruhe (TH)Rechenzentrum
• ein Systemname muß zur eindeutigen Identifikation angegeben werden
• der DEFINITION-Parameter gibt an, wie das System festgelegt wird:
DEFINITION=COORDINATESDie lokale x’- und y’-Achse werden durch die Koordinaten von zwei Punkten a und b festgelegt. Das ist die Standardvorbesetzung.
DEFINITION=NODESDie lokale x’- und y’-Achse werden durch die Knotennummernzweier Punkte a und b festgelegt.
DEFINITION=OFFSET TO NODESDie lokale x’- und y’-Achse wird durch lokale Knotennummern desElementes festgelegt. Die lokale Knotennummer 1 ist der Ursprung.

40 von 324 Universität Karlsruhe (TH)Rechenzentrum
• Der SYSTEM-Parameter gibt an, um welche Art von Koordinatensystem es sich handelt (s. *TRANSFORM):
SYSTEM=RECTANGULAREs handelt sich um ein kartesisches System. a liegt auf der lokalenx’-Achse, b in der Ebene, die von der x’- und y’-Achse aufgespannt wird.
SYSTEM=CYLINDRICALEs handelt sich um ein zylindrisches System. a und b legen dieZylinderachse fest.
SYSTEM=SPHERICALEs handelt sich um ein sphärisches System. a ist der Mittelpunktund b legt zusammen mit a die Polarachse fest.
SYSTEM=Z RECTANGULAREs handelt sich um ein kartesische System. a liegt auf der lokalenz’-Achse, b in der Ebene, die von der z’- und x’-Achse aufgespanntwird.

41 von 324 Universität Karlsruhe (TH)Rechenzentrum
Datenkarten:
1. Datenkarte: XA,YA,ZA,XB,YB,ZB[,XC,YC,ZC]
wenn DEFINITION=COORDIATESgesetzt ist, sonst
NA,NB
die Knotennummern der Punkte a und b
2. Datenkarte: I,α
Ι ist die lokale Richtung, um die noch eine Drehung um den Winkelα durchgeführt werden kann.
Bei Schalen und Membranen bedeutet Ι außerdem die lokaleRichtung, die aussagt, daß die Projektion der beiden anderenlokalen Achsen auf die Schalenebene die Materialachsen bildensollen.

42 von 324 Universität Karlsruhe (TH)Rechenzentrum
Beispiel:
Der Teil einer Zylinderschale bestehe aus einem Material, dessen Materialachsen um 45o gegenüber dem lokalenElementsystem gedreht ist.
Die entsprechende Option lautet dann:*ORIENTATION,SYSTEM=CYLINDRICAL
0,0,0,0,0,1
1,45
In diesem mitgeführten System werden die vektoriellen und tensoriellen Größen wie Spannungen, Dehnungen etc. ausgegeben.
z
x
y1
2
3

43 von 324 Universität Karlsruhe (TH)Rechenzentrum
Dehnungsmaße
Zu einem gegebenen Verschiebungszustand lassen sich, je nach geometrischer und physikalischer Eigenschaft des Modells, geeignete Dehnungsmaße definieren.
Ein Bereich Δx der unverformten Struktur, geht unter einer Belastung über in Δx’. Eine Fläche A geht über in eine verzerrte Fläche A’.
Das VerhältnisΔx’/Δx = λ
heißt Dehnungsquotient.
Aus der in ABAQUS berechneten inkrementellen Verschiebung x’(t) als Funktion einer fiktiven Zeit, ergibt sich
ε = ln λ
das logarithmische oder wahre Dehnungsmaß (Standard)
Die dazu komplementäre wahre Spannung ist
σ = F/A’

44 von 324 Universität Karlsruhe (TH)Rechenzentrum
Bei kleinen Verschiebungen und Dehnungen folgt durch Reihenentwicklung des Logarithmus:
ε = λ - 1das nominale Dehnungsmaß (Biot)
Die dazu komplementäre nominale Spannung istσ = F/A
Bei großen Verschiebungen und kleinen Dehnungen ist folgende Definition standard (Greensches Dehungsmaß):
ε = 1/2 (λ2 - 1)
Alle drei Maße können in ABAQUS ausgegeben werden.

45 von 324 Universität Karlsruhe (TH)Rechenzentrum
Rotationen
Rotationen werden durch einen Rotationsvektor P = (PX,PY,PZ), der die Drehachse festlegt, und einen Drehwinkel Φ beschrieben. Der Zusammenhang zwischen den beiden wird durch die Komponenten ΦX, ΦY, ΦZ gegeben. Die Winkel werden im Bogenmaß angegeben.
y
z P
Φ
x
Px Φx Φ⁄=
Py Φy Φ⁄=
Pz Φz Φ⁄=
Φ Φ2x Φy
2 Φz2+ +=

46 von 324 Universität Karlsruhe (TH)Rechenzentrum
Knotengenerierung

47 von 324 Universität Karlsruhe (TH)Rechenzentrum
NODE
Knotendefinition durch Eingabe der Koordinaten*NODE [,NSET=Set-Name][,SYSTEM={R|C|S}][,INPUT=Datei-Name]
N,X,Y,Z
Bemerkungen
• die Knotennummern müssen nicht lückenlos aufeinander folgen• bei identischen Knotennummern wird die letzte Definition verwendet• die Knotennummer kann maximal 9-stellig sein• die Koordinaten werden entsprechend der SYSTEM-Option interpretiert:
bei R als kartesische, bei C als zylindrische, bei S als sphärische Koordinaten; interne Umrechnung auf kartesische Koordinaten
• die Koordinaten können auch von einer Datei (INPUT) eingelesen werden• die Knotenkoordinaten beziehen sich standardmäßig auf das globale System

48 von 324 Universität Karlsruhe (TH)Rechenzentrum
NCOPY
Knotendefinition durch Kopieren von existierenden Knoten*NCOPY,CHANGE NUMBER=n,OLD SET=Set-Name,
{POLE|REFLECT={LINE|MIRROR|POINT}|SHIFT}[,MULTIPLE=m][,
NEW SET=Set-Name]
Bemerkungen• CHANGE NUMBER gibt das Inkrement an, das auf die Knotennummer von OLD SET
addiert wird und entsprechend die Knotennummern der Knoten in NEW SET erzeugt.
• Die POLE-Option gibt an, daß der OLD SET polar an einem Knoten gespiegelt werden soll.
• Die REFLECT-Option gibt an, daß der OLD SET gespiegelt werden soll und zwar
- an einer Ebene (REFLECT=MIRROR)- an einer LINIE (REFLECT=LINE) oder- an einem PUNKT (REFLECT=POINT).

49 von 324 Universität Karlsruhe (TH)Rechenzentrum
• Die SHIFT-Option gibt an, daß der OLDSET verschoben und/oder gedreht werden soll; im Zusammenhang damit bedeutet die MULTIPLE-Option die Anzahl der Rotationen.
Abhängig von den Optionen müssen 1-2 Datenzeilen angegeben werden.
POLE
Datenzeile: KN,XN,YN,ZN
Es müssen die Koordinaten des Polsoder die Knotennummer eines schonexistierenden Polarknoten eingegebenwerden
KN OLDSET NEWSET

50 von 324 Universität Karlsruhe (TH)Rechenzentrum
REFLECT=MIRROR Datenzeilen: XA,YA,ZA,XB,YB,ZB
XC,YC,ZC
Die Datenzeilen enthalten die Koordinaten von 3 Punkten a,b,c, die die Spiegelebene festlegen.
a
c
NEWSET OLDSETb

51 von 324 Universität Karlsruhe (TH)Rechenzentrum
REFLECT=LINE
Datenzeile: XA,YA,ZA,XB,YB,ZBDie Datenzeile enthält die Koordinaten der Punkte a und b, die die Linie definieren.
a
b OLDSETNEWSET

52 von 324 Universität Karlsruhe (TH)Rechenzentrum
REFLECT=POINT
Datenzeile: XA,YA,ZA
Die Datenzeile enthält die Koordinaten des Punktes a, an dem gespiegelt wird.
a
OLDSET NEWSET

53 von 324 Universität Karlsruhe (TH)Rechenzentrum
SHIFT
Datenzeilen: TX,TY,TZXA,YA,ZA,XB,YB,ZB,THETA
Die Datenzeilen enthalten die Komponenten des Translationsvektors, die Koordinaten der Punkte a und b, die die Rotationsachse festlegen und den Rotationswinkel. Die 2. Datenzeile muß ggf. als Leerzeile eingegeben werden. MULTIPLE gibt an, wie oft ggf. eine Rotation erfolgen soll (Def.: 1)
a
b
t
θ

54 von 324 Universität Karlsruhe (TH)Rechenzentrum
NGEN
Knotendefinition durch inkrementelle Generierung entlang einer (geraden,kreisförmigen oder parabelförmigen) Linie*NGEN[,LINE={P|C}][,NSET=Set-Name][,SYSTEM={RC|C|S}]N1,N2,I,N3,X3,Y3,Z3,NV1,NV2,NV3
Bemerkungen• I ist das Inkrement der Knotennumerierung (Default: 1).• Fehlt die LINE-Option, werden die Knoten entlang einer Geraden erzeugt.• Wird die LINE-Option gesetzt, muß der Mittelpunkt des Kreises bzw. der Scheitel
der Parabel entweder durch einen schon definierten Knoten mit der Knotennummer N3 oder durch Koordinaten (X3,Y3,Z3) spezifiziert werden.
• Falls LINE=C gesetzt wird, werden die Knoten auf dem kürzesten Bogen zwischen den Knoten N1und N2erzeugt. Soll der Bogen einen Winkel umschließen, der größer als 180 Grad ist, muß mit (NV1,NV2,NV3) ein Normalenvektor auf der Kreisebene definiert werden.
• SYSTEM dient zur Definition der Koordinaten (X3,Y3,Z3) wie bei *NODE

55 von 324 Universität Karlsruhe (TH)Rechenzentrum
N1
N2
N3 N1
N2
(NV1,NV2,NV3)
N3
N1 N2l
l
l
l
l
lN2
N1
LINE=P LINE=C
N3

56 von 324 Universität Karlsruhe (TH)Rechenzentrum
NFILL
Knotendefinition durch Auffüllen eines Bereichs, der von zwei Knotensätzen begrenzt ist.*NFILL[,BIAS=r[,TWOSTEP]][,NSET=Set-Name][,SINGULAR]
NSET1,NSET2,NINTER,NINC
Bemerkungen• Die BIAS-Option gibt das konstante Abstandsverhältnis zweier benachbarter
Knoten an. Ist r<1, so wird der Knotenabstand in Richtung des zweiten begrenzenden Knotensatzes größer, falls r>1 ist, entsprechend kleiner. Standardmäßig ist r=1, also der Abstand konstant. Falls zusätzlich die TWOSTEP-Option gesetzt ist, wird nur in jedem zweiten Schritt der Abstand verändert.
• NSET ist der Name des neuen Knotensatzes. Dieser umfaßt auch die Randknoten.• Die SINGULAR-Option ist bei der Erzeugung von Rißspitzen wichtig.

57 von 324 Universität Karlsruhe (TH)Rechenzentrum
NSET1 ist der Name des Startsatzes, NSET2 der des Endsatzes. NINTER gibt die Anzahl der Intervalle und NINC das Inkrement der Knotennummern an (Default: 1).
Beispiel:*NFILL,BIAS=0.5
INSIDE,OUTSIDE,5,100
101
106
105
104
103
102
601
602
603
604
605
606
201 301 401 501
INSIDE OUTSIDE

58 von 324 Universität Karlsruhe (TH)Rechenzentrum
NSET
Faßt Knoten zu einem SET zusammen.*NSET,NSET=Set-Name[,ELSET=Set-Name][,GENERATE]
Bemerkungen• Falls ELSET gesetzt ist, werden die Knoten, der Elemente aus dem ELSET in NSET
eingefügt.• Falls ELSET nicht gesetzt ist, muß eine Datenzeile angegeben werden
Datenzeilen:
Falls die GENERATE-Option nicht gesetzt ist:N1,N2,........N16
N17, ......
oder die Namen schon existierender N-Sets.
Falls die GENERATE-Option gesetzt ist:NFIRST,NLAST,NINC

59 von 324 Universität Karlsruhe (TH)Rechenzentrum
Vernetzung

60 von 324 Universität Karlsruhe (TH)Rechenzentrum
ELEMENT
Die Knoten werden zu Elementen verknüpft.*ELEMENT,TYPE=Elementtyp[,ELSET=Set-Name][,
INPUT=Datei-Name]
ENUM,N1,.......N15,
N16,....N20
Bemerkungen• Der TYPE-Parameter gibt den Elementtyp an, mit dem die Knoten verbunden sind. • Die Elementdaten können auch über den INPUT-Parameter aus einer Datei
gelesen werden.• Es können beliebig viele Daten eingelesen werden.• ENUM kann max. 9-stellig sein

61 von 324 Universität Karlsruhe (TH)Rechenzentrum
ELGEN
Aus einem vorgegebenen Element werden weitere Elemente generiert.*ELGEN[,ELSET=Set-Name]
ENUM,NE,IN,IE,NR,INR,IER,NL,INL,IEL
BemerkungenMit dem ELGEN-Kommando lassen sich ausgehend von einem existierendem Element, dem Master-Element, weitere Elemente in drei parametrischen Richtungen erzeugen.ENUM bezeichnet die Nummer des Master-ElementsNE Anzahl der Elemente in der 1. Reihe inkl. Master-ElementIN Inkrement der Knotennummern in der Reihe (Default: 1)IE Inkrement der Elementnummern in der Reihe (Default: 1)NR Anzahl der Reihen, die generiert werden sollen (Default: 1)INR Inkrement der Nummern korrespondierender Knoten in den
generierten ReihenIER Inkrement der Nummern korrespondierender Elemente in
den Reihen

62 von 324 Universität Karlsruhe (TH)Rechenzentrum
NL Anzahl der Ebenen, die generiert werden sollenINL Inkrement der Nummern korrespondierender Knoten in den
EbenenIEL Inkrement der Nummern korrespondierender Elemente in
den EbenenBeispieldatenzeile: 10,8,1,1,3,100,40
1 2 3 4 5 6 7 8 9
101
201
301
109
209
309302 303 304 305 306 307 308
50 51 52 53 54 55 56 57
10 11 12 13 14 15 16 17
90 91 92 93 94 95 96 97
Master-Element

63 von 324 Universität Karlsruhe (TH)Rechenzentrum
ELCOPY
Neue Elemente entstehen aus einem Element-Satz durch Kopieren.*ELCOPY,ELEMENT SHIFT=m,OLD SET=Set-Name,SHIFT NODES=n[,NEW SET=Set-Name][,REFLECT]
Bemerkungen• Zu jedem Element des OLD SET entsteht ein neues Element, dessen Nummer um
den ELEMENT SHIFT größer ist und die Knoten miteinander verbindet, deren Nummer um SHIFT NODES größer als die des entsprechenden alten Elementes ist.
• Falls der Umlaufsinn der Knotennummer in der Kopie sich vom Original unterscheidet, sollte der REFLECT-Parameter gesetzt werden. Dies funktioniert nur bei Kontinuumselementen.

64 von 324 Universität Karlsruhe (TH)Rechenzentrum
Beispiel:
*ELCOPY,ELEMENT SHIFT=5,OLD SET=GRUPPE1, SHIFT NODES=15,REFLECT,NEW SET=GRUPPE2
12
34
10GRUPPE1
1617
18 19
12
34
10GRUPPE1
1617
18 19
15 GRUPPE2

65 von 324 Universität Karlsruhe (TH)Rechenzentrum
ELSET
Faßt Elemente zu einem SET zusammen (analog zu *NSET).
*ELSET,ELSET=Set-Name[,GENERATE]
Datenzeilen:
Falls die GENERATE-Option nicht gesetzt ist:E1,E2,.......,E16E17,.....
oder die Namen schon existierender Element-Sets.
Falls die GENERATE-Option gesetzt ist:EFIRST,ELAST,EINC

66 von 324 Universität Karlsruhe (TH)Rechenzentrum
Elementebibliothek

67 von 324 Universität Karlsruhe (TH)Rechenzentrum
Elementspezifikation
Elemente werden festgelegt• topologisch
in dem eine Menge von Knoten vernetzt werden und der Elementtyp festgesetzt wird:*ELEMENT,TYPE=Elementtyp,....
• physikalischin dem in der SECTION-Anweisung die geometrischen Eigenschaften festgelegt werden und auf eine Materialspezifikation verwiesen wird.
Elementtyp Section
Stäbe, 2D/3D Kontinua *SOLID SECTION
Balken *BEAM SECTION
Schalen *SHELL SECTION

68 von 324 Universität Karlsruhe (TH)Rechenzentrum
Elementebibliothek
Namenskonvention:[prefix]typdimnum[postfix]
typ: C KontinuumselementeT Stabelemente B BalkenelementeS SchalenelementeI Interfaceelementeu.v.m
dim: 1D, 2D, 3D
AX axialsymmetrischPE ebener DehnungszustandPS ebener SpannungszustandGPE verallg. ebener Dehnungszustand
num: Anzahl der ElementknotenInterpolationsordnung bei Balken

69 von 324 Universität Karlsruhe (TH)Rechenzentrum
Prefix: A AkustikelementD Wärmeleitung (Diffusion)
Postfix: H hybrides ElementR reduziert integriertes ElementI inkompatibles ElementT Kopplung von Temperatur- und
Verschiebungsfreiheitsgradenu.v.m.
Beispiel:
S9R5 reduziert integriertes Schalenelement mit 5 Freiheitsgraden pro Knoten
C3D20 dreidim. Kontinuumselement mit 20 Knoten

70 von 324 Universität Karlsruhe (TH)Rechenzentrum
Formulierungen von Kontinuumselementen
voll integriert Es werden so viele Gaußpunkte verwendet, daß dienumerische Integration über die Interpolations-polynome exakt ist. n-Punkt Integration ist exakt fürPolynome der Ordnung < 2n-1.
reduziert integriert Es wird ein Gaußpunkt weniger pro Richtung ver-wendet, als zur exakten Integration nötig ist. SolcheElemente verhalten sich weicher als exaktintegrierte.
inkompatibel Lineare Kontinuumselemente können keine Biege-zustände darstellen. Daher werden quadratische stattlineare Interpolationsfunktionen gewählt.
hybrid Für ν −> 0.5 wird elastisches Material inkompressibel(z.B. Gummi), d.h. ein beliebig großer äußererhydrostatischer Druck erzeugt keine Knotenverschiebung.Der Druck wird als zusätzlicher Freiheitsgrad behandelt.

71 von 324 Universität Karlsruhe (TH)Rechenzentrum
Zweidimensionale Kontinuumselemente
Ebener Dehnungszustand
CPE3 lineares 3-KnotenelementCPE3H hybride Version
CPE4 bilineares 4-KnotenelementCPE4H hybride VersionCPE4I inkompatible VersionCPE4IH hybrid und inkompatibelCPE4R reduziert integrierte VersionCPE4RH reduziert integriert, hybrid
CPE6 quadratisches 6-KnotenelementCPE6H hybride Version

72 von 324 Universität Karlsruhe (TH)Rechenzentrum
CPE8 quadratisches 8-KnotenelementCPE8H hybride Version
CPE8R reduziert integrierte VersionCPE8RH reduziert integriert, hybrid
CPE4T Elemente mit gekoppeltem Temperatur-CPE4HT VerschiebungsansatzCPE8TCPE8HTCPE8RTCPE8RHT

73 von 324 Universität Karlsruhe (TH)Rechenzentrum
• CPE3 und CPE3H sollten nur als Übergangselemente verwendet werden, da sie nur konstante Dehnungen liefern und daher extrem steif sind.
• Freiheitsgrade: ux, uy, [T] in den Eckknoten ux, uy in den Seitenmittenknoten
• Berechnete Spannungs-/Dehungskomponenten: xx, yy, zz, xy• Elementdicke wird in *SOLID SECTION eingegeben• Knotenreihenfolge:
• Eingabekoordinaten: x, y
1
2
3
4
56
1 2
34
5
6
7
8

74 von 324 Universität Karlsruhe (TH)Rechenzentrum
Ebener Spannungszustand
CPS3 lineares 3-Knotenelement
CPS4 bilineares 4-KnotenelementCPS4I inkompatible VersionCPS4R reduziert integrierte Version
CPS6 quadratisches 6-Knotenelement
CPS8 quadratisches 8-KnotenelementCPS8R reduziert integrierte Version
CPS4T Elemente mit gekoppeltem Temperatur-CPS8T VerschiebungsansatzCPS8RT
• Für die Elemente des ebenen Spannungszustandes gilt entsprechend dasselbe
wie für die des ebenen Dehnungszustands• Berechnete Spannungs-/Dehungskomponenten: xx,yy,xy

75 von 324 Universität Karlsruhe (TH)Rechenzentrum
Beispiel: Eingespannter Balken mit CPS-Elementen
Die Verschiebung des Punktes x wird berechnet. Es werden 3 Vernetzungen verwendet:1x2 CPS4, CPS4R und CPS4I2x4 CPS4, CPS4R, CPS4I, CPS8 und CPS8R4x8 CPS4, CPS4R und CPS4I
Eine Balkenvergleichslösung liefert als Resultat für die Verschiebung 0.175 cm .
p
pR
x
E = 3400 kN/cm2
ν = 0.2t = 10 cml = 200 cmh = 100 cmp = 1.5 N/cm3
pR= 50 N/cm2

76 von 324 Universität Karlsruhe (TH)Rechenzentrum
In der folgenden Tabelle werden die auf das exakte Ergebnis normierten Resultate dargestellt:
1x2 2x4 4x8
CPS4
CPS4R
CPS4I
CPS8
CPS8R
0.714
0.966
0.949
0.954
0.880
1.251
0.966
0.983
0.989
0.960
1.040
0.983
258.286

77 von 324 Universität Karlsruhe (TH)Rechenzentrum
• CPS4-Elemente können keine Biegezustände darstellen und liefern erst mit zunehmender Netzverfeinerung in Längsrichtung bessere Ergebnisse(Shear Locking).
• Reduziert integrierte Elemente sind sehr weich. Bei zu wenigen Elementen in Querrichtung ist die Systemmatrix singulär (1x1, 1x2), da sog. Nullenergiemoden auftreten. Eine Ausbreitung dieser Moden bei größeren Netzen wird durch die sog. Hourglass-Steifigkeit eingeschränkt.
• Inkompatible Elemente sind genauer als lineare Elemente.• Die 8-Knotenelemente sind in sich schon biegsam, daher liefern sie die besten
Resultate
Ein Modell des Balkens mit 3D-Kontinuumselementen liefert qualitativ ähnliche Ergebnisse.

78 von 324 Universität Karlsruhe (TH)Rechenzentrum
Dreidimensionale Kontinumselemente
C3D4 lineares 4-Knotenelement (Tetraeder)C3D4H hybride Version
C3D6 lineares 6-Knotenelement (Prisma)C3D6H hybride Version
C3D8 lineares 8-Knotenelement (Quader)C3D8H hybride VersionC3D8I inkompatibles ElementC3D8IH inkompatibel und hybridC3D8R reduziert integriertC3D8RH hybride Version, reduziert integriert
C3D10 quadrat. 10-Knotenelement (Tetraeder)C3D10H hybride Version
C3D15 quadrat. 15-Knotenelement (Prisma)C3D15H hybride Version

79 von 324 Universität Karlsruhe (TH)Rechenzentrum
C3D20 quadrat. 20-Knotenelement (Quader)C3D20H hybride Version
C3D20R reduziert integriertC3D20RH hybride Version, reduziert integriert
Elemente mit gekoppeltem Temperatur-Verschiebungsansatz:C3D8T C3D20T C3D20RTC3D8HT C3D20HT C3D20RHT
Bemerkungen• C3D4 und C3D4H sind nur geeignet für sehr fein vernetzte Bereiche mit kleinen
Spannungsgradienten und als Übergangselement• aktive Freiheitsgrade: ux, uy, uz, [T] in den Eckknoten
ux, uy, uz in den Seitenmittenknoten • Elementeigenschaften werden über *SOLID SECTION ohne weitere Datenkarte
eingegeben• Berechnete Spannungs-/Dehnungskomponenten: xx, yy, zz, xy, xz, yz

80 von 324 Universität Karlsruhe (TH)Rechenzentrum
• Für die inkompatiblen, hybriden und reduziert integrierten Varianten gilt dasselbe wie bei den zweidim. Kontinuumselementen.
• Knotenreihenfolge:
1
2
3
4
5
6
7 8
9
1011
12
13
14
15
12
3
4
5
6
7
89
10
1 2
345 6
78
9
1011
12
1314
15
16
17 18
1920

81 von 324 Universität Karlsruhe (TH)Rechenzentrum
Axialsymm. Kontinuumselemente
CAX3 lineares 3-KnotenelmentCAX3H hybride Version
CAX4 bilineares 4-KnotenelementCAX4H hybride VersionCAX4I inkompatible VersionCAX4IH hybride und inkompatible VersionCAX4R reduziert integrierte VersionCAX4RH hybrid und reduziert integriert
CAX6 quadratisches 6-KnotenelementCAX6H hybride Version
CAX8 biquadratisches 8-KnotenelementCAX8H hybride VersionCAX8R reduziert integriertCAX8RH hybrid und reduziert integriert

82 von 324 Universität Karlsruhe (TH)Rechenzentrum
Elemente mit gekoppeltem Temperatur-Verschiebungsansatz:
CAX4T CAX8TCAX4HT CAX8HT
CAX8RTCAX8RHT
Bemerkungen
• CAX3 und CAX3H sollten nur als Übergangselemente benutzt werden.• Eingabekoordinatensystem: r, z (entspr. x, y)• Freiheitsgrade: ur, uz [und T] auf den Eckknoten
ur und uz auf den Seitenmittenknoten• Berechnete Spannungs-/Dehnungskomponenten: rr, zz, rz, Θ• Für die inkompatiblen, hybriden und reduziert integrierten Varianten gilt dasselbe,
wie bei den anderen Kontinuumselementen.• für Knotenkräfte muß der um den Umfang integrierte Wert eingegeben werden

83 von 324 Universität Karlsruhe (TH)Rechenzentrum
• Knotenreihenfolge:
• CGAX... Elemente haben einen zusätzlichen Verschiebungsfreiheitsgrad in azimuthaler Richtung (Twist)
1
2
3
4
56
1 2
34
5
6
7
8

84 von 324 Universität Karlsruhe (TH)Rechenzentrum
Kanten- und Seitennummerierung
Zweidimensionale KontinuumselementeDie Kanten werden durch die lokalen Knotennummerder Ecken definiert.Dreiecke
Kante 1 1 - 2Kante 2 2 - 3Kante 3 3 - 1
Vierecke
Kante 1 1 - 2Kante 2 2 - 3Kante 3 3 - 4Kante 4 4 - 1
1 2
3
1
2 3
1 2
34
1
2
3
4

85 von 324 Universität Karlsruhe (TH)Rechenzentrum
Dreidimensionale Kontinuumselemente
Die Seitenflächen werden durch die lokalen Knotennummern ihrer Eckknoten definiert.
Tetraeder
Fläche 1 1 - 2 - 3Fläche 2 1 - 4 - 2Fläche 3 2 - 4 - 3Fläche 4 3 - 4 - 1
Prisma
Fläche 1 1 - 2 - 3Fläche 2 4 - 6 - 5Fläche 3 1 - 4 - 5 - 2Fläche 4 2 - 5 - 6 - 3Fläche 5 3 - 6 - 4 -
1 2
3
4
12
34
1
2
3
4
5
6
1
2
3 4
5

86 von 324 Universität Karlsruhe (TH)Rechenzentrum
Quader
Fläche 1 1 - 2 - 3 - 4Fläche 2 5 - 8 - 7 - 6Fläche 3 1 - 5 - 6 - 2Fläche 4 2 - 6 - 7 - 3Fläche 5 3 - 7 - 8 - 4Fläche 6 4 - 8 - 5 - 1
1 2
3456
78
1
2
3
45
6

87 von 324 Universität Karlsruhe (TH)Rechenzentrum
Weitere Kontinuumselemente
Zusätzlich zu den Kontinuumselementen für den Spannungs-/Dehnungszustand und mit gekoppelten Temperaturfreiheitsgraden gibt es noch Elemente für andere Problembereiche :• Konvektion und Diffusion von Wärme (Temperatur)• Massendiffusion (Konzentrationen)• Sickerströmung (Verschiebungen, Druck)• Akustik (Druck)• Piezoelektrizität (Verschiebungen und elektrisches Potential)
Weitere Kontinuumselemente sind:• Membranen• Infinite Elemente• Warp-Elemente, um beliebige Balkenquerschnitte zu modellieren• Axialsymmetrische Elemente mit nichtsymmetrischer Verformung• Dreidim. Kontinuumselemente mit Flächenmittenknoten• Verallgemeinerte Elemente für den ebenen Dehnungszustand

88 von 324 Universität Karlsruhe (TH)Rechenzentrum
Auswahlkriterien für Kontinuumselemente
• Standard:quadratische, reduziert integrierte Elemente(CPE8R, CPS8R, C3D20R, CAX8R)
• bei rechtwinkligen Netzen und wenn keine große Verzerrungen zu erwarten sind:inkompatible Elemente (CPE4I, CPS4I, C3D8I, CAX4I)
• in Bereichen hoher Spannungskonzentrationen:quadratische, voll integrierte Elemente (CPE8, CPS8, C3D20,CAX8)
• bei großen Verzerrungen und Kontaktproblemen:linear reduzierte Elemente (CPE4R, CPS4R, C3D8R, CAX4R)
• wenn keine Biegezustände erwartet werden:lineare, voll integrierte Elemente (CPE4, CPS4, C3D8, CAX4)
• Dreiecke, Tetraeder und Prismen sollten möglichst nur als Übergangselemente oder bei komplizierten Geometrien eingesetzt werden.
89 von 324 Universität Karlsruhe (TH)Rechenzentrum
Stab-Elemente
Eindimensionale Elemente in 2 und 3 Dimensionen (Truss-Elemente):
2D 3D
T2D2 lineares 2-Knotenelement T3D2T2D3 quadratisches 3-Knotenelement T3D3
Freiheitsgrade: ux, uy, (uz)
T2D2H Hybridversion T3D2HT2D3H T3D3H
T2D2T Temperatur als zusätzlicher Freiheitsgrad T3D2TT2D3T T3D3T
90 von 324 Universität Karlsruhe (TH)Rechenzentrum
Bemerkung• Stabelemente nehmen nur Axialkräfte auf• es werden die axiale Spannung und Dehnung berechnet: E11 und S11• Querschnittsfläche und Materialzuordnung über *SOLID SECTION• 3-Knotenelement wird für gekrümmte Versteifungen benutzt• in der Hybridversion wird die Axialkraft zusätzlich als Unbekannte behandelt.
Dadurch können sehr steife Stäbe modelliert werden, z.B. für starre Verbindungen. Dies ist eine Alternative zu den Rigid Elements.
• Knotenreihenfolge und Normalendefinition (in 2D):
1
2 2 3
1
n n

91 von 324 Universität Karlsruhe (TH)Rechenzentrum
SOLID SECTION
Eigenschaften von Kontinuumselementen werden über die Option *SOLID SECTION festgelegt.*SOLID SECTION,ELSET=Set-Name,{MATERIAL=Materialname|COMPOSITE}[,STACK DIRECTION={1|2|3}][,ORIENTATION=Systemname]
Datenzeile: Querschnittsfläche bei StabelementenDicke bei 2D-ElementenLaminatbeschreibung bei 3D-Elementen
• ELSET ist der Name der Elementgruppe, auf die sich die Option bezieht• MATERIAL bezieht sich auf den Namen einer Materialdefinition in einer *MATERIAL-Option
• ORIENTATION bezieht sich auf den Namen eines Materialkoordinatensystems in einer *ORIENTATION-Option
• COMPOSITE bedeutet, daß das Element ein Laminat beschreiben soll, STACK DIRECTION gibt die (lokale) Richtung der Schichtung an.

92 von 324 Universität Karlsruhe (TH)Rechenzentrum
• Die Datenkarte ist optional. Falls keine angegeben wird, setzt ABAQUS intern den Wert 1.0 ein. Falls der COMPOSITE Parameter gesetzt ist, muß für jede Laminatschicht eine Datenkarte eingegeben werden:
LD Dicke der LaminatschichtNI Anzahl der Integrationspunkte der Schicht
(Vorbesetzung: 1)M Materialname für die SchichtO oder α Name einer Orientierung für diese Schicht oder
Drehwinkel im Gegenuhrzeigersinn, um den um die Normale gedreht werden soll, bezogen auf die Orientierung, die durch den ORIENTATION-Parameter festgelegt ist.
α wird in Winkelgrad angegeben!

93 von 324 Universität Karlsruhe (TH)Rechenzentrum
Schalenelemente
Die Ausdehnung der Struktur ist in eine Richtung wesentlich kleiner als in die zwei anderen, dazu orthogonalen Richtungen.
Das Verhältnis von Schalendicke zu charakterischen Längen in den dazu senkrechten Richtungen ist kleiner als 1/10.
Charakteristische Längen sind z.B.• Abstände zwischen Festhaltungen• Krümmungsradius• die Wellenlänge des höchsten Schwingungsmode
Die Elementgröße ist kein Kriterium!
Bei der Anwendung muss man unterscheiden zwischen• dicken und dünnen Schalen• "Allzweck"-Elemente, die sowohl für dicke als auch für dünne Schalen eingesetzt
werden können• Schalenelemente für große und kleine Dehnungen

94 von 324 Universität Karlsruhe (TH)Rechenzentrum
Dünne Schalen
• Kirchhoff-Theorie, Biegung wird durch Auslenkung der Mittelebene beschrieben• Verhältnis Schalendicke zu charakteristischen Länge < 1/15• Namenskonvention:
STRI3 flaches 3-KnotenelementSTRI65 6-Knotenelement mit 5 DOFs/KnotenS4R5 4-Knotenelement, reduziert integriert, endliche
Membrandehnung, 5 DOFs/KnotenS8R5 reduziert integriert, 5 DOFs/KnotenS9R5 9-Knotenelement, reduziert integriert,
5DOFs/Knoten

95 von 324 Universität Karlsruhe (TH)Rechenzentrum
• die Reduktion der Integration bezieht sich auf die Gausspunkte in der Schalenebene
• bei Elementen mit 5 Freiheitsgraden pro Knoten entfallen 3 auf die Verschiebungen und zwei auf Rotationen um die lokale 1- und 2-Achse
• ein Knoten trägt 6 Freiheitsgrade (3 Verschiebungs- und 3 globale Rotationsfreiheitsgrade), wenn- ein Rotationsfreiheitsgrad in Randbedingungen einbezogen ist
(*BOUNDARY,*MPC) - er gleichzeitig zu einem Balken- oder Schalenelement gehört, das 6 Freiheitsgrade an
diesem Knoten benutzt- er auf einer Knicklinie zweier Schalenelemente liegt- an ihm äußere Drehmomente angreifen

96 von 324 Universität Karlsruhe (TH)Rechenzentrum
Dicke Schalen
• Verhältnis Schalendicke zu charakt. Länge > 1/15• Namenskonvention
S8R 8-Knotenelement, reduziert integriert
S8RT 8-Knotenelement, reduziert integriert,für Temperatur-Verschiebungskopplung
• 6 Freiheitsgrade pro Knoten:3 globale Verschiebungen, 3 globale Drehungen und ggf. die Temperatur an der Schalenunterseite und die Temperaturverteilung durch den Querschnitt je nach Anzahl der Integrationspunkte
• Elemente haben eine endliche Schubsteifigkeit, die von ABAQUS abgeschätzt wird. Sie kann vom Benutzer auch explizit über die Option *TRANSVERSE SHEAR STIFFNESS eingegeben werden
• alle Elemente sind auch für endliche Membrandehnungen geeignet

97 von 324 Universität Karlsruhe (TH)Rechenzentrum
Allzweck-Schalenelemente
• Namenskonventionen:
S3/S3R 3-Knotenelement, reduziert integriert, endlicheMembrandehnung
S4/S4R 4-Knotenelement, reduziert integriert, endlicheMembrandehnung
• die Elemente Sn und SnR (n=3,4) sind identisch• je nach Schalendicke wird die Theorie für dicke Schalen bzw. für dünne Schalen
angewendet• es gibt noch kontinuierliche Schalenelemente, die topologisch wie 3D-
Kontinuumselemente aussehen (s.u.).

98 von 324 Universität Karlsruhe (TH)Rechenzentrum
Endliche und kleine Dehnungen
• für große, endliche Dehnungen und große Rotationen sind die folgenden Elemente geeignet: - S3/S3R- S4/S4R
• für kleine Dehnungen und große Rotationen sind die folgenden Elemente geeignet: - STR3- S4R5- STRI65- S8R- S8RT- S8R5- S9R5

99 von 324 Universität Karlsruhe (TH)Rechenzentrum
Schaleneigenschaften
• Eigenschaften werden in der *SHELL SECTION oder der*SHELL GENERAL SECTION eingegeben.
• Schalen können über den Querschnitt homogen oder aus verschiedenen Schichten aufgebaut sein (Laminate).
• Eingabe der Knotenkoordinaten und (optional) der Richtungskosinus der Knotennormalen
• Ausgabe: lokale Spannungs-und Dehnungskomponenen 11, 22, 12.Dazu kommen eine Fülle an Spannungs-, Dehnungs- undKraftkomponenten bezogen auf Laminate oder Schichten.
• Knotenreihenfolge
1 2
3
4
56
1 2
34
5
6
7
8 9

100 von 324 Universität Karlsruhe (TH)Rechenzentrum
Flächennormale
• die Richtung der Elementnormalen wird durch die Korkenzieher-Regel der Knotenreihenfolge bestimmt
• die Austrittseite der Normale ist die Schalenoberseite, entsprechend ist dadurch auch die Schalenunterseite festgelegt
2
34
1
n

101 von 324 Universität Karlsruhe (TH)Rechenzentrum
Lokales System
1-Achse: Projektion der globalen x-Achse auf die Fläche; falls derWinkel zwischen x-Achse und Flächennormalen kleiner als1o ist, wird die globale z-Achse projiziert.
2-Achse: ist senkrecht zur 1-Achse, so daß zusammen mit derFlächennormalen ein rechtshändiges Dreibein gebildet wird.
1
23

102 von 324 Universität Karlsruhe (TH)Rechenzentrum
Knotennormale
Verformungen der Schalen gehen von der Anfangskrümmung aus. Daher muß von jedem Element der Normalenvekor in den Knoten bekannt sein.Es gibt drei Möglichkeiten, die Knotennormale zu spezifizieren:
• keine Angabe: ABAQUS berechnet für jeden Knoten aus der Lage der Nachbarelemente die Richtungskosinus näherungsweise. Diese Methode ist nur dann gut, wenn die Krümmung stetig und nicht zu groß ist.
• *NODES: die Richtungskosinus werden in der *NODES-Option als 4. bis 6. Koordinate eingegeben. Da nur eine Normale pro Knoten definiert werden kann, ist diese Möglichkeit nur bei glatten Flächen geeignet.
• *NORMAL:mit der *NORMAL-Option kann zu jedem Knoten eine zusätzliche Normale, bezogen auf ein Element, definiert werden.

103 von 324 Universität Karlsruhe (TH)Rechenzentrum
1
2
3
1 2
*NODE1,0,0,0,-0.707,0.7072,1,1,0,-0.707,0.7073,2,0,0,0.707,0.707*NORMAL2,2,1,1,0
Komponenten des NormalenvektorsKnotennummer oder Set-NameElementnummer oder Set-Name
104 von 324 Universität Karlsruhe (TH)Rechenzentrum
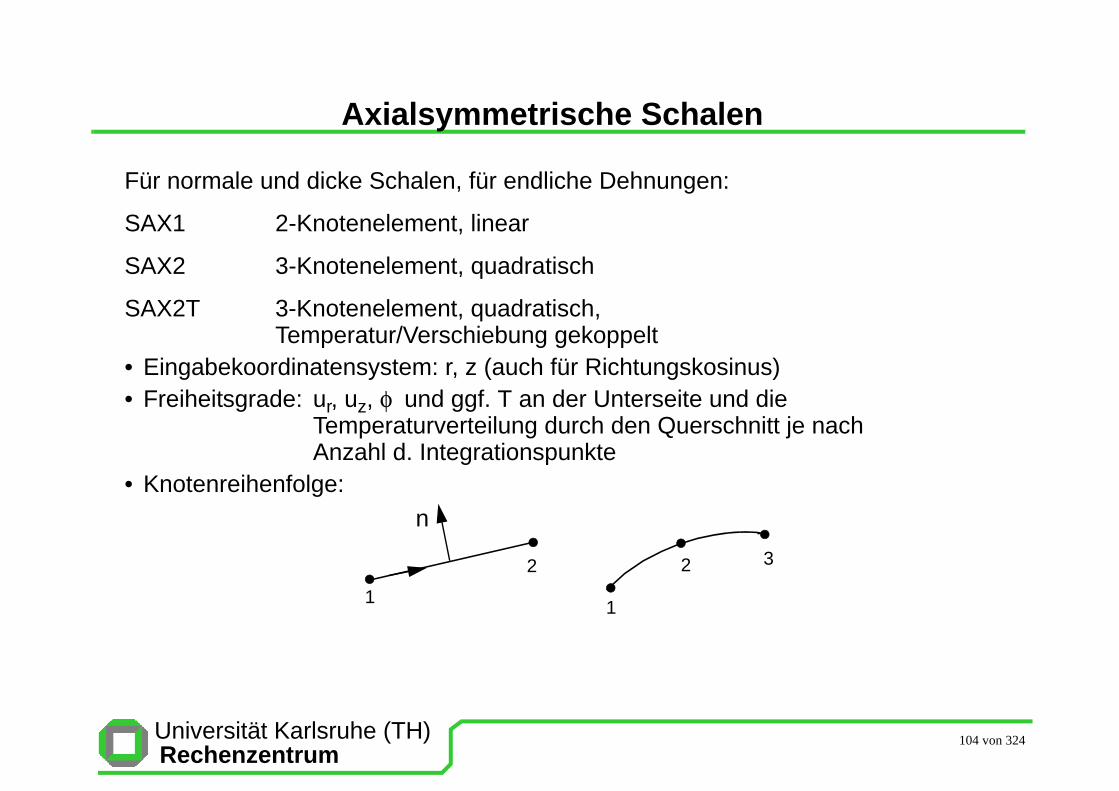
Axialsymmetrische Schalen
Für normale und dicke Schalen, für endliche Dehnungen:
SAX1 2-Knotenelement, linear
SAX2 3-Knotenelement, quadratisch
SAX2T 3-Knotenelement, quadratisch,Temperatur/Verschiebung gekoppelt
• Eingabekoordinatensystem: r, z (auch für Richtungskosinus)• Freiheitsgrade: ur, uz, φ und ggf. T an der Unterseite und die
Temperaturverteilung durch den Querschnitt je nachAnzahl d. Integrationspunkte
• Knotenreihenfolge:
1
2 2 3
1
n

105 von 324 Universität Karlsruhe (TH)Rechenzentrum
Weitere Schalenelemente
Als weitere Schalenelemente stehen zur Verfügung:• axialsymmetrische Schalen mit asymmetrischer Deformation und für dünne
axialsymmetrische Schalen:- SAXA1n- SAXA2n
• ein 4- und ein 8-Knotenelement für die Wärmeleitungsberechnung

106 von 324 Universität Karlsruhe (TH)Rechenzentrum
SHELL SECTION
*SHELL SECTION,ELSET=Set-Name,{COMPOSITE|MATERIAL=Materialname}[,NODAL THICKNESS][,ORIENTATION=Systemname][,POISSON=n][,DENSITY=d][,OFFSET=q]
Es folgen Datenkarten je nach Parameter.• Falls das Schalenelement homogen ist, wird der MATERIAL-Parameter gesetzt
und bezeichnet den Namen einer Materialdefinition in einer *MATERIAL Option.• Falls es sich bei dem Element um ein Laminat handelt, wird der COMPOSITE-
Parameter gesetzt. Der Materialname wird in der folgenden Datenzeile gesetzt.• ist NODAL THICKNESS gesetzt,wird die Schalendicke nicht von der Datenzeile,
sondern über die *NODAL THICKNESS Option eingelesen;wichtig für Schalen mit variabler Dicke
• ORIENTATION bezieht sich auf den Namen eines Koordinatensystems in einer *ORIENTATION Option und gibt das Koordinatensystem für die Materialachsen bei orthotropen oder anisotropen Materialien an

107 von 324 Universität Karlsruhe (TH)Rechenzentrum
• POISSON benennt eine effektive Querkontraktionszahl und ist wichtig beim Einsatz der Elemente mit endlicher Dehnung, um die Änderung der Schalendicke bei zunehmender Dehnung zu berücksichtigen.Standardvorbesetzung: 0.5
• einer Schalenfläche kann eine nichtstrukturelle Masse zugeordnet werden, die nicht zur Steifigkeit beiträgt (z.B. Belag, Tapete, Anstrich); DENSITY=q gibt den Wert der Masse pro Flächeneinheit an. Gleichzeitig muss bei der Materialdefinition für diese Elemente eine strukturelle Masse über die *DENSITY Option angegeben werden.
• die Knoten legen die Referenzfläche der Schalen fest, die normalerweise mit der Schalenmittenfläche übereinstimmt. Manchmal ist es vorteilhaft, wenn die Referenzfläche demgegenüber verschoben ist. Dies wird durch einen OFFSET-Wert erreicht, der angibt, um welchen Bruchteil der Schalendicke die Referenzfläche gegenüber der Mittenfläche nach oben (positiver Wert) oder nach unten (negativer Wert verschoben wird. Ist q=+0.5, so liegt die Referenzfläche auf der Schalenober- bzw. -unterseite.

108 von 324 Universität Karlsruhe (TH)Rechenzentrum
Die Datenzeilen hängen davon ab, ob der MATERIAL- oder der COMPOSITE-Parameter gesetzt ist.
COMPOSITE
Für jede Schicht des Laminats muß eine Datenkarte mit folgenden Angaben eingegeben werden:LD Dicke der LaminatschichtNI Anzahl der Auswertepunkte im Querschnitt, Standard: 3 M Materialname für die SchichtO oder α Name einer Orientierung für diese Schicht oder
Drehwinkel im Gegenuhrzeigersinn, um den um die Normalegedreht werden soll bezogen auf die Orientierung, die durchden ORIENTATION-Parameter oder das lokale Systemfestgelegt ist.

109 von 324 Universität Karlsruhe (TH)Rechenzentrum
MATERIAL
Es ist nur eine Datenzeile nötig:SD SchalendickeNI Anzahl der Querschnittspunkte in Richtung der
Schalendicke, Standard:5
Die Standardvorbesetzung für NI reicht für die meisten linearen und nichtlinearen Probleme aus.
In der ABAQUS-Sprache werden die Punkte als Section Points bezeichnet, an denen berechnete Größen ausgegeben werden.Standardmäßig werden Kräfte, Spannungen, etc. am
1. Querschnittspunkt = Schalenunterseite
und am
5. Querschnittspunkt = Schalenoberseite
ausgegeben. In den Ausgabeanweisungen kann die Vorbesetzung übersteuert werden.
54
32
1
Normale

110 von 324 Universität Karlsruhe (TH)Rechenzentrum
Kontinuumsschalenelemente
• Kontinuumsschalenelemente sehen aus wie 3D-Kontinuumselemente, verhalten sich aber wie gewöhnliche Schalenelemente
• nur quader- und prismenförmige Elemente sind erlaubt• die Schalendicke wird explizit modelliert• die Knoten haben nur Translationsfreiheitsgrade• Knotenreihenfolge wie bei 3D-Kontinuumselementen• Flächennummerierung wie bei 3D-Kontinuumselementen• Normalenrichtung und Richtung der Schalendicke zeigt standardmäßig von der
Fläche 1 zur Fläche 2• bei der Modellierung von Laminaten, ist
die Stapelrichtung (Stack Direction)wichtig. Diese stimmt standardmäßig mitder Richtung der Schalendicke übereinund ist die Richtung 3.
• bei Quadern kann man die Stack Directionund Richtung der Schalendicke auch in die Richtungen 1 oder 2 definieren oder in der *SHELL SECTION mittels einem *ORIENTATION Koordinatensystem
• bei Prismen gibt es nur eine 3-Richtung, senkrecht auf einer der Dreiecksflächen
1 2
3456
78
1
2
3
45
6
1
23

111 von 324 Universität Karlsruhe (TH)Rechenzentrum
• Namenskonvention:
SC6R 6-Knoten-Prisma; die Dreiecksflächen bilden dieSchalenflächen
SC8R 8-Knoten-Hexaeder• alle Elemente sind für endliche Dehnungen geeignet• Elementeigenschaften werden in der *SHELL SECTION oder *SHELL GENERAL SECTION definiert

112 von 324 Universität Karlsruhe (TH)Rechenzentrum
SHELL SECTION für Kontinuumsschalen
*SHELL SECTION,ELSET=Set-Name,{COMPOSITE|MATERIAL=Materialname}[,POISSON={n|MATERIAL}][,THICKNESS MODULUS=E][,STACK DIRECTION={1|2|3|ORIENTATION}][,ORIENTATION=Systemname][,DENSITY=d]
• Die Parameter ELSET,COMPOSITE,MATERIAL,POISSON und DENSITY haben dieselbe Bedeutung wie diejenigen bei der *SHELL SECTION für konventionelle Schalenelemente.
• zusammen mit dem POISSON-Parameter muss der THICKNESS MODULUS Parameter gesetzt werden; dieser Wert ein effektiver E-Modul in Richtung der Schalendicke; falls POISSON=MATERIAL gesetzt wird, entfällt der Parameter und ABAQUS berechnet die effektiven Werte für die Querkontraktionszahl und den E-Modul in Richtung der Schalendicke aus der Materialdefinition für die Schalenelemente
• STACK DIRECTION gibt die Stapelrichung bzw. Richtung in Schalendicke an; setzt man STACK DIRECTION=ORIENTATION muss über den ORIENTATION-Parameter der Name einer *ORIENTATION Systemdefinition angegeben werden
• Datenzeilen wie bei der *SHELL SECTION für konventionelle Schalenelemente

113 von 324 Universität Karlsruhe (TH)Rechenzentrum
Balkenelemente
Bei Balken ist die Ausdehnung in einer Richtung wesentlich größer als in den beiden anderen orthogonalen Richtungen. Das Verhältnis zwischen Querschnittsabmessungen zu charakteristischen Längsabmessungen ist < 1/10.
Balkenelemente werden definiert in 2 und in 3 Dimensionen. Entsprechend unterscheiden sie sich in ihrer Definition und ihren Freiheitsgraden.

114 von 324 Universität Karlsruhe (TH)Rechenzentrum
2D-Balken
• Biegung und Dehnung• Freiheitsgrade: ux, uy, φz• Eingabekoordinaten: x, y
optional: Nx, Ny, die Richtungskosinus für die Balkennormale
• Namenskonvention: B2... oder PIPE2...• Um die Orientierung des Balkenquerschnitts zu beschreiben, wird ein lokales
(t,n1,n2) System benutzt. t ist die Tangente an der Balkenachse, die Richtung zeigt
vom 1. zum 2. Knotenn1 hat die Komponenten (0,0,-1)n2 wird in der *NODE- oder in der *NORMAL-Option
definiert. Falls keine Angaben gemacht werden, wird n2berechnet.

115 von 324 Universität Karlsruhe (TH)Rechenzentrum
3D-Balken
• Biegung, Dehnung, Torsion und Verwölbung (bei Balken mit offenem Querschnitt)• Freiheitsgrade: ux, uy, uz, φx, φy, φz und ggf. w• Eingabekoordinaten: x, y, z
optional: Nx, Ny, Nz, die Richtungskosinus der 2.lokalen Querschnittsachse
• Namenskonvention: B3... oder PIPE3... • Lokales (t,n1,n2) System:
t ist die Tangente an der Balkenachse, die Richtung zeigtvom 1. zum 2. Knoten
n1 muß in der *BEAM SECTION angegeben werdenVorbesetzung: (0,0,-1)
n2 wird in der *NODE- oder in der *NORMAL-Optiondefiniert. Falls keine Angaben gemacht werden, wird n2berechnet.

116 von 324 Universität Karlsruhe (TH)Rechenzentrum
1
2t
n1
n2

117 von 324 Universität Karlsruhe (TH)Rechenzentrum
2D-Balken
B21 2-Knotenelement, linearB21H hybride VersionB22 3-Knotenelement, quadratischB22H hybride VersionB23 2-Knotenelement, kubischB23H hybride Version
3D-Balken
B31 2-Knotenelement, linearB31H hybride VersionB32 3-Knotenelement, quadratischB32H hybride VersionB33 2-Knotenelement, kubischB33H hybride VersionB34 2-Knotenelement, kubisch

118 von 324 Universität Karlsruhe (TH)Rechenzentrum
• Die hybriden Versionen sollten bei sehr schlanken oder sehr steifen Balken verwendet werden.
• Bei schubweichen Balken müssen die linearen oder quadratischen Balken verwendet werden. In der *BEAM SECTION kann eine Querkontraktionszahl für die Querschnittdehnung angegeben werden, die sich bei endlicher Längsdehnung einstellt (Timoshenko-Theorie).
• Elemente 3. Ordnung beschreiben schubstarre Balken (Bernoulli-Theorie)• bei gekrümmten Balken werden, wie bei den gekrümmten Schalen, die Normalen
an den Knoten berechnet. Bei sehr starker Krümmung bzw. Knicken sollte die Normalenrichtung explizit eingegeben werden- entweder über die *NORMAL Option oder- über die Koordinaten in der *NODE Option

119 von 324 Universität Karlsruhe (TH)Rechenzentrum
BEAM SECTION
Die Balkenquerschnitte werden in der *BEAM SECTION oder*BEAM GENERAL SECTION festgelegt:*BEAM SECTION,SECTION=Querschnittstyp, MATERIAL=Materialname[,ELSET=Set-Name][,POISSON=ν]
Es folgen Datenkarten, je nach Querschnittstyp. Als Querschnittstyp sind u.a. zugelassen:
ARBITRARY beliebiger QuerschnittBOX rechteckiger, hohler QuerschnittCIRC kreisförmiger, voller QuerschnittHEX hexagonaler, hohler QuerschnittI I-ProfilL L-ProfilPIPE kreisförmiger, hohler QuerschnittRECT rechteckiger, voller QuerschnittTRAPEZOID trapezförmiger Querschnitt
Je nach Querschnittstyp sind die Querschnittspunkte festgelegt.

120 von 324 Universität Karlsruhe (TH)Rechenzentrum
Die Beschreibung der Balkenquerschnitte und der Datenkarten findet man in Abschnitt 23.3.9 des User´s Manual.
Beispiel: SECTION=CIRC
Ausgabepunkte von Spannungen (Default):Punkte 1 und 5 Punkte 3,7,11,15
1
2
3
4
5
1
2
1
23
45
6 78
910
11
1213
1415
1617
1
2
2D-Balken 3D-Balken

121 von 324 Universität Karlsruhe (TH)Rechenzentrum
3 Datenkarten in der *BEAM SECTION:
R Nx,Ny,Nz NI1,NI2
Es bedeuten:
R Radius
Ni Koordinaten von n1; Default: 0,0,-1
Falls hier ein Eintrag bei 2D-Balken steht, muß er (0,0,-1)sein.
NI1 2D-Balken: Anzahl d. Querschnittspunkte, max. 9,Standard: 5
3D-Balken: Anzahl der Querschnittspunkte in radialerRichtung, Standard: 3
NI2 Anzahl der Querschnittspunkte in Umfangsrichtung,Standard: 8

122 von 324 Universität Karlsruhe (TH)Rechenzentrum
Weitere Elemente
• WARP-Elemente sind 2D-Elemente, mit denen allgemeine Balkenquerschnitte modelliert werden; Referenz auf diese Elemente über die *BEAM GENERAL SECTION der Balken, die diesen Querschnitt besitzen sollen
• Rohre (PIPE)• Rohrkrümmer (ELBOW)• Dämpfer (DASHPOT)• Kontaktelemente (GAP)• Kontaktelemente mit starrer Oberfläche (IRS)• Angerissene Schalen (LINE SPRING)• Federelemente (SPRING)• Interface-Elemente (INTER)• Gleitlinien- und -flächenelemente• u.v.m.

123 von 324 Universität Karlsruhe (TH)Rechenzentrum
Materialeigenschaften

124 von 324 Universität Karlsruhe (TH)Rechenzentrum
Materialeigenschaften
Die allgemeine Struktur der Materialeingabe ist:*MATERIAL,NAME=Materialname*Materialoption
Daten
*Materialoption
Daten
...
Die Materialoption und die Daten beschreiben das Stoffverhalten. Im Kurs wird nur elastisches Materialverhalten betrachtet

125 von 324 Universität Karlsruhe (TH)Rechenzentrum
anisotropes Material*ELASTIC,TYPE=ANISOTROPICD1111,D1122,D2222,D1133,D2233,D3333,D1112,D2212
D3312,D1212,D1113,D2213,D3313,D1213,D1313,D1123
D2223,D3323,D1223,D1323,D2323
σ11
σ22σ33τ12τ13τ23
D1111 D1122 D1133 D1112 D1113 D1123
D2222 D2233 D2212 D2213 D2223D3333 D3312 D3313 D3323
D1212 D1213 D1223D1313 D1323
D2323
ε11ε22ε33γ12γ13γ23
=

126 von 324 Universität Karlsruhe (TH)Rechenzentrum
orthotropes Material*ELASTIC,TYPE=ORTHOTROPIC
D1111,D1122,D2222,D1133,D2233,D3333,D1212,D1313
D2323

127 von 324 Universität Karlsruhe (TH)Rechenzentrum
Orthotrope Materialien lassen sich auch durch Eingabe der Konstantenwie E-Modul, Schubmodul und Poisson-Zahl spezifizieren. Die Inverse der Spannungs/Dehnungsmatrix lautet
1E1------
ν12E1--------∠
ν13E1--------∠ 0 0 0
1E2------
ν23E2--------∠ 0 0 0
1E3------ 0 0 0
1G12--------- 0 0
1G13--------- 0
1G23---------

128 von 324 Universität Karlsruhe (TH)Rechenzentrum
*ELASTIC,TYPE=ENGINEERING CONSTANTS
E1,E2,E3,ν12,ν13,ν23,G12,G13
G23
Für orthotrope Materialien im ebenen Spannungszustand wie z.B. bei Schalen ist σ33 = 0, so daß noch weniger Konstanten benötigt werden:
*ELASTIC,TYPE=LAMINA
E1,E2,ν12,G12,G13,G23
Isotrope Materialien (Standard)*ELASTIC,TYPE=ISOTROPIC
E,ν
Das Materialverhalten kann von der Temperatur und anderen Feldgrößen abhängig gemacht werden. Dazu gibt man zu jeder Temperatur einen kompletten Satz von Materialkonstanten und der zugehörigen Temperatur ein.

129 von 324 Universität Karlsruhe (TH)Rechenzentrum
Beispiel für ein isotropes Material:*ELASTIC E1,ν1,T1 E2,ν2,T2 . . En,νn,Tn*EXPANSION α
ν
T
E

130 von 324 Universität Karlsruhe (TH)Rechenzentrum
Weitere Materialeigenschaften:
*CONDUCTIVITY Wärmeleitfähigkeit*DENSITY Dichte*EXPANSION Wärmeausdehnungskoeff.*SPECIFIC HEAT spez. Wärmeu.v.m.
Weitere Stoffgesetze:
Plastizität und Clay Plastizität (z.B. Lehm)KriechenDrucker-PragerBetonHyperelastisch (z.B. Gummi)HypoelastischVersagen bei Materialien, die keinen Zug oder Druck übertragenporöse Stoffeu.v.m.

131 von 324 Universität Karlsruhe (TH)Rechenzentrum
TRANSVERSE SHEAR STIFFNESS
Bei den dicken Schalen S4R,S8R, und S8RT und den linearen und quadratischen Balken B21, B22, B31,B32 treten bei Biegung über den Querschnitt Schubspannungen auf.
Falls in der Materialeingabe eine *ELASTIC-Option vorkommt, berechnet ABAQUS aus den Parametern für das elastische Verhalten eine effektive Schubsteifigkeit. Diese kann durch*TRANSVERSE SHEAR STIFFNESS
überschrieben werden.
Falls die Materialeingabe keinen "elastischen Anteil" hat, muss die Schubsteifigkeit eingegeben werden.
*TRANSVERSE SHEAR STIFFNESS muss direkt hinter der *SECTION Anweisung stehen.

132 von 324 Universität Karlsruhe (TH)Rechenzentrum
Bei Schalen:*TRANSVERSE SHEAR STIFFNESS
K13,K23
Bei Balken:*TRANSVERSE SHEAR STIFFNESS
K23,K13
• Falls nur ein Zahlenwert angegeben wird, wird für beide Richtungen derselbe Wert genommen.
• Bei 2D-Balken braucht nur K23 angegeben werden.
1
2
3
1
2

133 von 324 Universität Karlsruhe (TH)Rechenzentrum
2. Beispiel: Verbundplatte
Eine Platte aus zwei Schichten steht unter gleichförmigen Druck. Die beiden Laminate haben eine Orientierung von +/- 45o zu den Plattenseiten. Die Platte ist bezüglich des globalen Systems verschoben und gedreht.
Zur Knoteneingabe im gestrichenen System wird die *SYSTEM Option gesetzt.
x
z
x'
y'z'
a
y
cb

134 von 324 Universität Karlsruhe (TH)Rechenzentrum
Ursprungskoordinaten: (1,2,5)
Koordinaten von a: (2,3,5)
Koordinaten von b: (0,3,6)
Abmessungen der Platte: a = 10 inchh = 0.2 inch
Last: p = 100 lb/inch2
Die Stoffeigenschaften sind für orthotropes Material im ebenen Spannungszustand durch
E11 = 40 x 106 lb/inch2
E22 = 106 lb/inch2
G12 = G13 = G23 =0.5 x 106 lb/inch2
ν12 = 0.25

135 von 324 Universität Karlsruhe (TH)Rechenzentrum
Die Platte liegt in der x’y’-Ebene. Um die Verschiebungen bequem zu interpretieren zu können, werden sie im gestrichenen Koordinatensystem ausgegeben. Dies erreicht man durch die *TRANSFORM-Option mit den Richtungsvektoren
a235
125
∠110
==
b036
125
∠1∠
11
==

136 von 324 Universität Karlsruhe (TH)Rechenzentrum
*HEADING TWO LAYER COMPOSITE PLATE +/- 45 DEG ORIENTATION*SYSTEM 1.,2.,5. , 2.,3.,5. 0.,3.,6.*NODE1, 0.,0.,017,10.,0.,0.1601,0.,10.,0.1617,10.,10.,0.*NGEN,NSET=BOT1,17*NGEN, NSET=TOP1601,1617*NFILL,NSET=ALLBOT,TOP,16,100*TRANSFORM,TYPE=R,NSET=ALL1.,1.,0., -1.,1.,1.*NSET,NSET=YPAR,GEN1,1601,10017,1617,100

137 von 324 Universität Karlsruhe (TH)Rechenzentrum
*NSET,NSET=XPAR,GEN1,171601,1617*ELEMENT,TYPE=S9R51,1,3,203,201,2,103,202,101,102*ELGEN,ELSET=PLATE1,8,2,1,8,200,8*SHELL SECTION,ELSET=PLATE,COMPOSITE.1,3,LAMINA,LAYER1.1,3,LAMINA,LAYER2*TRANSVERSE SHEAR STIFFNESS5.0E7,5.0E7*MATERIAL,NAME=LAMINA*ELASTIC,TYPE=LAMINA40.E6,1.E6,.25,.5E6,.5E6,.5E6*ORIENTATION,NAME=LAYER1,SYSTEM=R1.,1.,0.,-1.,1.,1.3,-45.*ORIENTATION,NAME=LAYER2,SYSTEM=R1.,1.,0.,-1.,1.,1.3,45.

138 von 324 Universität Karlsruhe (TH)Rechenzentrum
*STEP*STATIC*BOUNDARYXPAR,2,3YPAR,1YPAR,3*DLOADPLATE,P,100.*EL PRINT,POSITION=AVERAGED AT NODESSF,SE,*NODE PRINTU,*END STEP

139 von 324 Universität Karlsruhe (TH)Rechenzentrum
Lösungsalgorithmen

140 von 324 Universität Karlsruhe (TH)Rechenzentrum
Lösungsalgorithmen
Im FE-Modell ist folgende Gleichgewichtsbedingung zu lösen:
R(u) = K
wobei R(u) die Summe aller inneren Kräfte und K die Summe der äußeren Kräfte ist. u steht für den Gesamtvektor der Verschiebungen (und evt. anderer Freiheitsgrade).
Im linearen, statischen Fall ist
R(u) = A . u
so daß
A . u = K
als lineares Gleichungssystem zu lösen ist. Im nichtlinearen Fall muß die Gleichung iterativ gelöst werden.

141 von 324 Universität Karlsruhe (TH)Rechenzentrum
Newton-Raphson
R(u)
u
K
A1
u 1
1
u1
δu1
A2
Ψ1
u2
δu2
u3
Ψ2
Ψ(u) = R(u)-K = 0
A1 u = K => u1
Ψ1 = Ψ(u1)
Ψ(u2) ≅ Ψ (u1) + (δΨ/δu)1 δu1=0
(δΨ/δu)1 δu1 = A2 δu1 = - Ψ1
=> δu1u2 = u1 + δu1
Ψ2 = Ψ(u2)
Ψ(ui+1) ≅ Ψ (ui) + (δΨ/δu)i δui=0
(δΨ/δu)i δui = Ai+1 δui = - Ψi+1 => δui
ui+1 = ui+ δuiΨi+1 = Ψ(ui+1)

142 von 324 Universität Karlsruhe (TH)Rechenzentrum
Modifizierter Newton-RaphsonR(u)
u
K
A
u1
δu1
u2
δu2
u3
Iterationsalgorithmus wie beimNewton-Raphson. Statt einerTangentensteifigkeitsmatrix A i
wird immer dieselbe Anfangsmatrixverwendet.

143 von 324 Universität Karlsruhe (TH)Rechenzentrum
Quasi-Newton
Standardmäßig wird die Steifigkeitsmatrix alle 8 Iterationen neu berechnet.
Ai δui = -Ψ(ui)=>δuiui+1 = ui + δui
Ψi+1 = Ψ(ui+1)Mit dem neuen δui,Ψi, Ψi+1 wird aus Ai+1 δui = -(Ψi-Ψi+1)eine neue Steifigkeitsmatrix berechnet.
R(u)
u
K
A0
u1
δu1
A1
Ψ1
u2 u3
Ψ2
δu2

144 von 324 Universität Karlsruhe (TH)Rechenzentrum
Vergleich
Newton-Raphson
Vorteil: Schnelle KonvergenzNachteil: Nach jeder Iteration muß eine neue Steifigkeitsmatrix
gebildet werden. Die Steifigkeitsmatrix kann bei bestimmten Materialeigenschaften unsymmetrisch werden.
Modifizierter Newton-Raphson
Vorteil: Es muß nur einmal die Steifigkeitsmatrix gebildet werden.Größerer Konvergenzradius.
Nachteil: Langsamere Konvergenz
Quasi-Newton
Vorteil: Schnellere Konvergenz, erhält die Matrixsymmetrie.Nachteil: Unter Umständen größerer Rechenaufwand für die
Sekantenberechnung. In ABAQUS wird der BFGS-Algorithmus benutzt, zur Aktualisierung der Matrix.

145 von 324 Universität Karlsruhe (TH)Rechenzentrum
Inkremente
Bei statischen linearen Problemen wird die Lösung in einem Zeitschritt iteriert. Bei nichtlinearen Problemen oder bei zeitabhängigen Lasten, wird die Last in Inkremente aufgeteilt, wobei jedes Inkrement ein Zeitschritt bedeutet. Also auch statische Lasten werden in einem Zeitintervall aufgebracht. Jeder Zeitschritt wird iteriert, wobei die Größe des Inkrements von ABAQUS so gesteuert wird, daß die Lösung innerhalb einer vorgegebenen Iterationsanzahl konvergiert.
Die Last ist im statischen Falleine lineare Funktion der Zeit.
u tn tn+1 t=1
Kn
Kn+1
K
Kn+1
Kn

146 von 324 Universität Karlsruhe (TH)Rechenzentrum
Lösungsalgorithmen in ABAQUS
• ABAQUS verwendet, je nach Problem alle drei Verfahren.- bei stark nichtlinearen Problemen: Newton-Raphson- bei zyklischen Vorgängen (quasistatisch): modifizierter Newton-Raphson mit
gelegentlichem Matrix-Update- bei großen Systemen und wenn die Matrix sich beim Update nur wenig ändert, bei starker
Nichtlinearität und Anwendung des Line Search Verfahrens: Quasi-Newton.Anforderung über *SOLUTION TECHNIQUE
• Zwei Kriterien müssen erfüllt sein, damit im i-ten Iterationsschritt Konvergenz erreicht wird:- Ψi / K < 5.0E-3, wobei K eine über die Struktur gemittelter Wert für die Kraft ist- δui / ui+1 < 1.0E-3
• Die Inkremente werden automatisch gesteuert. Falls im Inkrement nach 16 Iterationen keine Konvergenz erreicht wird, wird das Inkrement verkleinert. Nach 5 solchen Cut-Backs ohne Konvergenz wird die Berechnung abgebrochen.
• Alle Werte zur Steuerung der Iterationen können über *CONTROLS verändert werden. Die Standardwerte sind ausreichend für die meisten Anwendungen.

147 von 324 Universität Karlsruhe (TH)Rechenzentrum
Gleichungslösung
Bei linear statischen Problemen und bei den Iterationsverfahren muß die System-Matrix aufgestellt und das Gleichungssystem gelöst werden. Dies geschieht meist in zwei Schritten:
• Aufbau der Gesamtsteifigkeitsmatrix aus den Elementsteifigkeitsmatrizen (Assemblierung)
• Lösen des Gleichungssystems; häufig verwendete Algorithmen sind - Gauß’sche Eliminationsverfahren (direkte Verfahren)- iterative Verfahren, z.B. CG-Verfahren
In ABAQUS wird standardmäßig ein Sparse Solver verwendet:• ein sog. Multifrontal-Solver• besonders geeignet für nichtkompakte Strukturen• parallelisiert

148 von 324 Universität Karlsruhe (TH)Rechenzentrum
Ein iterativer Solver steht für statische Probleme und stationäre Wärmeüber-gangsprobleme zur Verfügung. Der Algorithmus folgt der Domain Decomposition Methode, bei der die gesamte Struktur in nichtüberlappende Bereiche zerlegt wird und jeder Bereich für sich gelöst wird.
Mehr als dreifache Performancesteigerung gegenüber dem Sparse Solver ist möglich, jedoch nur bei sehr gut konditionierten Systemen. Einige Bedinungen für einen sinnvollen Einsatz sind:• kompakte Strukturen mit Kontinuumselementen• mehrere Millionen Freiheitsgrade• möglichst homogenes Material• kein von Kontaktwechselswirkungen dominiertes Problem• keine Constraints, in denen große Flächen miteinander gekoppelt werden (*TIE)

149 von 324 Universität Karlsruhe (TH)Rechenzentrum
Parallelisierung
Sparse Solver• 2 Parallelisierungsstrategien
- supernode die Abarbeitung einzelner Fronten erfolgt parallelisiert- tree mehrere Fronten werden parallel abgearbeitet
• Performanceverbesserung nur bei großen Problemen• im ABAQUS-Aufruf bzw. ABAQUS-Environment-File muß
parallel={supernode|tree}
gesetzt werden
Iterativer Solver
die einzelnen Domänen werden auf die angeforderten Prozessoren verteilt

150 von 324 Universität Karlsruhe (TH)Rechenzentrum
Belastungsgeschichte

151 von 324 Universität Karlsruhe (TH)Rechenzentrum
Belastungsgeschichte
Die Belastungsgeschichte ist eine Folge von Berechnungsschritten.
Ein Berechnungsschritt ist logisch ein Lastfall, also eine komplette Problembeschreibung, die zwischen*STEP, ...
und*ENDSTEP
eingeschlossen ist.
Ein Berechnungsschritt enthält• Prozeduren (= Analysearten)• Lastarten• Randbedingungen• Ausgabeanforderungen

152 von 324 Universität Karlsruhe (TH)Rechenzentrum
STEP
*STEP[,AMPLITUDE={STEP,RAMP}][,INC=NINC][,NLGEOM][,PERTURBATION,][SOLVER=DDM]
Datenkarte: Untertitel für den Step (optional)
Bemerkungen:• Der AMPLITUDE-Parameter beschreibt, wie die Last in dem Berechnungsschritt
aufgebracht wird.
STEP: Die gesamte Last wird als Ganzes sofort aufgebracht.
RAMP: Die Last wird linear über den Step aufgebracht.
Der Default hängt von der Prozedur ab und ist bei statischen Problemen vom Typ RAMP. Die Standardvorbesetzung sollte nicht geändert werden, d.h. der Parameter kann fast immer weggelassen werden.

153 von 324 Universität Karlsruhe (TH)Rechenzentrum
• INC gibt die maximale Anzahl der Inkremente in diesem Berechnungsschritt an (Default: 10)
• Der NLGEOM-Parameter muß gesetzt werden, wenn das Problem geometrisch nichtlinear berechnet werden soll. Der Parameter ist wirksam für alle folgende Steps.
• Der PERTURBATION-Parameter linearisiert das Problem, d.h. am aktuellen Arbeitspunkt der Kraft-Verschiebungskurve (base state) wird eine lineare Tangentensteifigkeitsmatrix konstruiert und darauf basierend das Strukturverhalten berechnet. Falls der Perturbation-Step- der erste Step ist, wird auf den Anfangsbedingungen aufgesetzt- ein späterer Step ist, wird auf dem Endzustand des letzten vorherigen Step
aufgesetzt, der kein Perturbation-Step ist- einige Prozeduren sind automatisch Perturbation-Steps (z.B. *FREQUENCY)
• SOLVER=DDM schaltet den iterativen Solver ein

154 von 324 Universität Karlsruhe (TH)Rechenzentrum
Prozeduren
Einige wichtige Prozeduren, die ABAQUS anbietet:
*BUCKLE Stabilitätsberechnung
*COUPLED TEMPERATURE- gekoppelte Temperatur- DISPLACEMENT Verschiebungsberechnung
*DYNAMIC dynamische Berechnung, direkte Zeitintegration
*FREQUENCY Eigenfrequenzen und Eigenmoden
*COMPLEX FREQUENCY komplexe Eigenfrequenzen und Eigenmoden
*HEAT TRANSFER Wärmeausbreitung
*MODAL DYNAMIC dynamische Berechnung, Modenüberlagerung
*RESPONSE SPECTRUM Anwortverhalten
*STATIC Statik
*STEADY STATE DYNAMICS stationärer Zustand bei harmonischer Anregung

155 von 324 Universität Karlsruhe (TH)Rechenzentrum
Statik
Im Kurs befassen wir uns zunächst nur mit linear statischen Lastfällen.*STATIC[,DIRECT]TINI,TTOTAL,TMIN,TMAX
Bemerkungen:Wenn der DIRECT-Parameter gesetzt ist, muß der Benutzer in der folgenden Datenkarte die konstante Schrittweite angeben. Ansonsten wird die Schrittweite von ABAQUS variabel gewählt. Die Datenkarte kann dann meistens entfallen.
TINI anfängliches Zeitinkrement, wird von ABAQUS ggf. modifiziert,falls DIRECT gesetzt ist, ist dies das konstante Zeitinkrement
TTOTAL Gesamtzeit des BerechnungsschrittesTMIN kleinstes zugelassenes InkrementTMAX größtes zugelassenes Inkrement
Die beiden letzten Parameter haben nur Sinn, wenn das Inkrement variabel ist.

156 von 324 Universität Karlsruhe (TH)Rechenzentrum
Für die meisten Fälle braucht die Datenkarte zu *STATIC nicht eingegeben werden. Die Standardvorbesetzungen für die Daten und auch für die verschiedenen Konvergenzkriterien sind kompliziert und von den Prozeduren abhängig.
Im Standardfall versucht ABAQUS die Last in einem Zeitschritt aufzubringen. Das bedeutet:
TINI = 1.0TTOTAL = 1.0
TMIN = 10-5
TMAX = 1.0
Maximale Anzahl an Gleichgewichtsiterationen pro Inkrement: 16

157 von 324 Universität Karlsruhe (TH)Rechenzentrum
Randbedingungen
Randbedingungen werden in ABAQUS über die *BOUNDARY-Option festgesetzt. Dabei kann die Option
• in der Modelleingabe stehen, falls es sich um fixe Randbedingungen handelt, in denen Freiheitsgrade zu Null gesetzt werden, oder
• in der Belastungsgeschichte, wenn es sich um zeitlich veränderliche Randbedingungen handelt oder um fixe Randbedingungen, in denen Freiheitsgrade auf einen endlichen Wert gesetzt werden.
In ABAQUS können Freiheitsgrade voneinander abhängig gesetzt werden, sog. Multipoint Constraints (MPCs). Dazu gibt es die Optionen *MPC und *EQUATION. Weitere kinematische Zwangsbedingungen sind
Anfangswerte (*INITIAL CONDITIONS)Restarts (*RESTART)Funktionsverläufe für Lasten und Verschiebungen (*AMPLITUDE).
Wir behandeln nur fixe Randbedingungen.

158 von 324 Universität Karlsruhe (TH)Rechenzentrum
BOUNDARY
*BOUNDARY[,{OP={NEW,MOD}|FIXED}]
OP=NEW evt. früher gesetzte Randbedingungen sind nicht mehr gültigOP=MOD die spezifizierten Randbedingungen kommen zu schon evt.
bestehenden hinzu
FIXED mit diesem Parameter muß die *BOUNDARY-Option im History-Teildes Eingabedatensatzes stehen. Alle Werte von Variablen, die ineinem vorherigen Step mittels *BOUNDARY im History-Teil gesetztwurden, sollen im aktuellen Step auf diesem Wert gehalten werden
Es gibt weitere Parameter, die hier nicht relevant sind.
Randbedingungen werden im• direkten Format• Type-Format
eingegeben.

159 von 324 Universität Karlsruhe (TH)Rechenzentrum
Direktes Format
N oder N-SET,DOF1,DOFL,VAL
N bezeichnet die Knotennummer oderN-SET die Knotengruppe, für die die Randbedinung gelten sollDOF1 ist der erste FreiheitsgradDOFL ist der letzte Freiheitsgrad eines Bereiches, die festgesetzt
werden sollen. Falls dieses Feld leer bleibt, wird nur derFreiheitsgrad DOF1 festgesetzt.
VAL Wert den der (oder die) Freiheitsgrad(e) annehmen sollen.Falls das Feld leer bleibt, sind die Verschiebungen oderRotationen, die durch DOF1 bis DOFL gekennzeichnet sind,auf Null gesetzt.

160 von 324 Universität Karlsruhe (TH)Rechenzentrum
Type-Format
Bei reinen Spannungs-/Dehnungsanalysen können auch Symmetrie-Randbedingungen angegeben werden. Desgleichen können Randbedingungstypen spezifiziert werden:N oder N-SET,TYP
XSYMM Symmetrieebene X = const (ux = φy = φz = 0)YSYMM Symmetrieebene Y = const (uy = φx = φz = 0)ZSYMM Symmetrieebene Z = const (uz = φx = φy = 0)
Entsprechend gibt es auch XASYMM, YASYMM und ZASYMM für Antisymmetriebedingungen. Weitere Typen sind
ENCASTRE alle Verschiebungs- und Rotationsfreiheitsgrade vonN oder in N-SET sind Null
PINNED alle Verschiebungsfreiheitsgrade von N oder in N-SETsind Null

161 von 324 Universität Karlsruhe (TH)Rechenzentrum
Lasten
Im Kurs werden nur Knotenlasten (*CLOAD) und verteilte Lasten (*DLOAD) behandelt. Beide Optionen haben einen AMPLITUDE- und einen OP-Parameter.
AMPLITUDE
Standardmäßig wird die Last in der Weise aufgebracht, wie es der AMPLITUDE-Parameter in der *STEP Option vorsieht. Es läßt sich mit der *AMPLITUDE Option eine Zeitfunktion definieren, die die Variation der Last über den Berechnungsschritt beschreibt. Der AMPLITUDE-Parameter referiert diese Funktion.
OP
Falls mehrere Berechnungsschritte aufeinanderfolgen, besteht die Möglichkeit, daß die Lastbeschreibung aus einem vorherigen Step modifiziert, weiter gültig bleibt oder vollkommen neu definiert wird.

162 von 324 Universität Karlsruhe (TH)Rechenzentrum
OP=NEW alle früheren Lastbeschreibungen des gleichen Typs sindnicht mehr gültig und werden durch die Beschreibung inder folgenden Datenkarte ersetzt. Folgt keine Datenkarte,so werden alle Lastarten dieses Typs entfernt.
OP=MOD Alle Lastbeschreibungen von vorherigen Steps bleibengültig, die Last, die durch die folgende Datenkarte beschrieben wird, kommt hinzu. Falls diese Last sich aufdieselben Knoten bzw. Elemente bezieht, wie die Lastdesselben Typs in einem vorherigen Step, so wird dieseersetzt.

163 von 324 Universität Karlsruhe (TH)Rechenzentrum
Beispiel:
*STEP Volumenkräfte der Größe*STATIC 20 in X-Richtung auf die*DLOAD Elementgruppe A1 und derA1,BX,20. Größe 50 in Y-Richtung aufB1,BY,50. B1. Knotenkräfte in Richtung*CLOAD des ersten FreiheitsgradesN1,1,100. der Größe 100.*ENDSTEP*STEP Die konzentrierten Kräfte*CLOAD,OP=NEW verschwinden, eine Volu-*DLOAD,OP=MOD menkraft der Größe 10 aufC1,BZ,10. C1 in Z-Richtung kommtA1,BX,30. hinzu und die Volumenkraft*ENDSTEP auf A1 wird von 20 auf 30
geändert.

164 von 324 Universität Karlsruhe (TH)Rechenzentrum
Konzentrierte Kräfte
*CLOAD[,AMPLITUDE=AMPLITUDE-Name][,OP={MOD|NEW}][,FOLLOWER]
N oder N-SET,DOF,VAL
N Knoten oderN-SET Knotengruppe, auf die die Kraft oder das Moment wirktDOF Nummer des Freiheitsgrades, auf den die Last wirktVAL Größe der Last, wird ggf. noch mit der AMPLITUDE
multipliziert
Bei Balken oder Schalen treten an den Knoten Rotationen auf. Falls die Kraftrichtung sich mit der Rotation am Knoten mitdrehen soll, muß der FOLLOWER-Parameter gesetzt werden. Dies ist nur wichtig bei großen Verschiebungen und Drehungen.

165 von 324 Universität Karlsruhe (TH)Rechenzentrum
Verteilte Lasten
*DLOAD[,AMPLITUDE=AMPLITUDE-Name][,OP={MOD|NEW}]
E oder E-SET,TYP,VAL
E Element oderE-SET Elementgruppe, auf die die Last wirktTYP Lastart, hängt vom Elementtyp ab.VAL Größe der Last, wird ggf. noch mit der AMPLITUDE
multipliziert
Je nach Elementtyp sind unterschiedliche Lastarten zugelassen. Eine vollständige Beschreibung für jedes Elements findet man im 14. Kapitel des ABAQUS User‘s Manual.

166 von 324 Universität Karlsruhe (TH)Rechenzentrum
Wichtige Lastarten sind:
BX, BY, BZ Volumenkräfte bei Kontinuums- und Schalenelementen
BR, BZ Volumenkräfte bei axialsymmetrischen Kontinuums- undSchalenelementen
P Druck auf das Schalenelement; positiv in Richtung derNormalen
PX, PY, PZ Kraft pro Einheitslänge bei Balken
P1, P2 Kraft pro Einheitslänge bei Balken in Richtung der lokalen1- bzw. 2-Richtung.
Pn Gleichförmiger Druck auf die n-te Seite bei Kontinuums-elementen (2D und 3D) , Richtung in das Element hinein.Die Seitennummer des Elements hängt von der lokalenKnotennummerierung ab.

167 von 324 Universität Karlsruhe (TH)Rechenzentrum
Restart
Die *RESTART Option veranlaßt das Schreiben oder das Lesen (oder beides) von Restart-Dateien, so daß ein ABAQUS-Lauf• mit einem weiteren Step fortgesetzt werden kann• in einem Step mit einer neuen Prozedur fortgesetzt werden kann• in einem schon berechneten Step wieder aufsetzen kann• einen Step, der aus Systemgründen abgebrochen wurde, z.B. wegen
Zeitüberschreitung, beendet werden kann
Die *RESTART Option steht• im Modelleingabeteil, wenn ein Restart-File gelesen werden soll• in der Belastungsgeschichte, wenn ein Restart-File geschrieben werden soll
Ein Restart-File ist ebenfalls Voraussetzung, um mittels der *POST OUTPUT Option aus einem abgeschlossenen ABAQUS-Lauf zusätzliche Druckausgabe oder Ausgabe in eine Datei zu erzielen

168 von 324 Universität Karlsruhe (TH)Rechenzentrum
*RESTART,{READ|WRITE}[,FREQUENCY=N][,OVERLAY][,END STEP][,INC=NINC][,STEP=NSTEP]
Bemerkungen:• mindestens READ oder WRITE muß angegeben werden.• FREQUENCY gibt an, jedes wievielte Inkrement auf das Restart-File geschrieben
werden soll (Default: 1). Das letzte Inkrement eines Steps wird immer gesichert. FREQUENCY=0 beendet das Beschreiben des Restart-Files.
• Nach Maßgabe des FREQUENCY-Parameters wird jedes N-te Inkrement hintereinander auf das Restart-File geschrieben. Gibt man den OVERLAY-Parameter ein, so wird immer nur ein Inkrement im Restart-File gehalten. Jedesmal wenn ein Inkrement gesichert wird, wird das alte überschrieben.

169 von 324 Universität Karlsruhe (TH)Rechenzentrum
• Um einen Punkt im Restart-File zum Lesen exakt ansteuern zu können, gibt man die Step-Nummer und die Nummer des Inkrementes in diesem Step mit den Parametern STEP und INC an. Falls kein Step-Parameter angegeben wird, wird auf den letzten Step in dem Restart-File positioniert. Falls kein INC-Parameter angegeben wird, wird auf das letzte Inkrement im Step positioniert.Steps werden in der Reihenfolge, in der sie bearbeitet werden numeriert.
• Falls zu einer Kombination STEP=NSTEP, INC=NINC, END STEP gesetzt wird, so bedeutet das, daß an dieser Stelle der momentane Step als abgeschlossen betrachtet werden soll. Im Eingabedatensatz muß dann allerdings eine *STEP Option folgen, die einen neuen Step definiert.
• Ein *RESTART,WRITE gilt für alle folgenden Steps, bis ein weiteres *RESTART,WRITE vorkommt.
• Restart-Files werden nicht verlängert, jeder ABAQUS-Lauf erzeugt ein neues Restart-File

170 von 324 Universität Karlsruhe (TH)Rechenzentrum
Beispiel:
*RESTART,WRITE,FREQ=4...
*STEP,INC=20*STATIC...
*ENDSTEP*STEP,INC=30*DYNAMIC...
*ENDSTEP
Jeweils das 4. und 6. Inkrement im 1 Step und das 4. und 5. Inkrement im 2. Step können in einem folgenden Restart-Lauf angesprochen werden.
12
34
5 6 12
34 5
STEP 1 STEP 2
t

171 von 324 Universität Karlsruhe (TH)Rechenzentrum
Weitere Beispiele
Im Folgenden soll immer ein Restart erfolgen, der auf einem ABAQUS-Job mit Identifier job1 basiert. Der Restart-Job hat den Identfier job2.
Aufruf: abaqus job=job2 oldjob=job1
1. Fortsetzung eines abgebrochenen ABAQUS-Jobs:*HEADING Restart eines abgebrochenen Laufes*RESTART,READ,STEP=1,INC=increment
Wenn der STEP- und INC-Parameter wegfällt, setzt ABAQUS automatisch auf den letzten Step und das letzte Inkrement auf.

172 von 324 Universität Karlsruhe (TH)Rechenzentrum
2. Fortsetzung mit einem weiteren Step*HEADING Restart mit einem neuen Step*RESTART,READ,STEP=1,INC=last-increment*STEP
neue Step Definition*ENDSTEP
3. Aufsetzen in einem abgeschlossenen Step, um den Lastverlauf zuändern, den Endzeitpunkt einer dynamischen Rechnung zu verlängernetc.*HEADING Restart eines abgeschlossenen Laufes*RESTART,READ,STEP=1,INC=increment,END STEP*STEP
modifizierte Step-Definition*ENDSTEP

173 von 324 Universität Karlsruhe (TH)Rechenzentrum
ABAQUS-Ausgabe

174 von 324 Universität Karlsruhe (TH)Rechenzentrum
Weit über 300 Ausgabevariable sind je nach Prozedur, Element und Lastfall möglich. Eine Tabelle findet man in Kap. 4.2.1 des ABAQUS User’s Manual.
Ausgabeformen sind
• Druckausgabe• Ausgabe auf eine Datei (für Postprocessing mit HyperMesh, MSC.Patran u.a.)• Ausgabe auf die Output Database (für Postprocessing mit ABAQUS/CAE bzw.
ABAQUS/Viewer)• Restart-Datei
Ausgabeanweisungen unterscheiden zwischen
Knotenvariable Verschiebungen, Kräfte, Druck, Temperaturen,Geschwindigkeiten, und andere Freiheitsgrade
Elementvariable Spannungen, Dehnungen, Querschnittsvariable bei Schalen und Balken u.v.m

175 von 324 Universität Karlsruhe (TH)Rechenzentrum
Knotenvariable
U alle Verschiebungs- und RotationskomponentenUn n-te Verschiebungskomponente (n=1,2,3)URn n-te RotationskomponenteWARP VerwölbungNT TemperaturenRF alle Komponenten der Reaktionskräfte und -momenteRFn n-te Komponente der ReaktionskraftRMn n-te Komponente des ReaktionsmomentsCF alle Komponenten der konzentrierten Kräfte und MomenteCFn n-te PunktkraftkomponenteCMn n-te Punktmomentkomponente
Geschwindigkeiten, Beschleunigungen, Koordinaten, ...

176 von 324 Universität Karlsruhe (TH)Rechenzentrum
Elementvariable
S alle Spannungskomponenten
Sij ij-te Spannungskomponente (1≤ i ≤ j ≤ 3)SP alle HauptspannungskomponentenSPn n-te HauptspannungskomponenteSINV alle Stressinvarianten (MISES, TRESC, PRESS,INV3)MISES MISES-VergleichsspannungTRESC TrescaPRESS Druck ( p = - σii)
E alle DehnungskomponentenEij ij-te DehnungskomponenteEP alle HauptdehnungskomponentenEPn n-te Hauptdehnungskomponente
ENER alle EnergiedichtenSENER elastische Dehnungsenergie

177 von 324 Universität Karlsruhe (TH)Rechenzentrum
SF QuerschnittskräfteSFn Querschnittskräfte im n-ten Section PointSMn Querschnittsmomente im n-ten Section PointSE alle Dehnungen, Krümmungen und Verwindungen im
Querschnitt
SEn Dehnungen im n-ten Section Point
logarithm. Dehnungskomponenten, nominale Dehnungskomponenten, elastische und plastische Dehnungsanteile, Schubspannungskomponenten, ....

178 von 324 Universität Karlsruhe (TH)Rechenzentrum
Druckausgabe
Knotenvariable
*NODE PRINT[,FREQUENCY=I][,GLOBAL={NO|YES}][,NSET=Set-Name][,SUMMARY={YES|NO}][,TOTALS={YES|NO}]
Bemerkungen:• FREQUENCY gibt an, nach jedem wievieltem Inkrement die Ausgabe erfolgen soll
(Default: 1). FREQUENCY=0 unterdrückt die Ausgabe.• Wenn eine *TRANSFORM Option gesetzt ist, kann diese durch GLOBAL=YES
übersteuert werden und die Knotenvariablen werden im globalen System ausgegeben.
• NSET gibt die Knotengruppe an, deren Ergebnisse ausgegeben werden sollen; Default: alle Knoten.
• SUMMARY und TOTALS geben das Maximum, Minimum und den Gesamtwert der Variablen in jeder Spalte aus.
Datenzeilen:Es folgen ein oder mehrere Datenzeilen, die jede eine Knotenvariable oder eine Liste von Knotenvariablen enthält. Falls die *NODE PRINT Option nicht gesetzt wird, erfolgt keine Ausgabe.

179 von 324 Universität Karlsruhe (TH)Rechenzentrum
Elementvariable*EL PRINT[,FREQUENCY=I][ELSET=Set-Name][,POSITION={AVERAGED AT NODES|CENTROIDAL|INTEGRATION POINTS|NODES}][,SUMMARY={YES|NO}][,TOTAL={YES|NO}]
Bemerkungen:
Der POSITION-Parameter gibt an, wie die Elementvariable ausgegeben werden sollen:
AVERAGED AT NODES
Die Elementvariable werden von den Integrationspunkten zu den Knoten extrapoliert. Über alle Beiträge an einem Knoten wird gemittelt.
CENTROIDAL
Elementvariable werden in der Elementmitte ausgewertet.

180 von 324 Universität Karlsruhe (TH)Rechenzentrum
INTEGRATION POINTS
Elementvariable werden an den Integrationspunkten ausgewertet.
NODES
Elementvariable werden von den Integrationspunkten zu den Knoten extrapoliert, aber nicht gemittelt.
Datenzeilen:
Liste der Section Points bei Balken- oder Schalenelemente, an denen die Variablen ausgegeben werden sollen. Falls diese Karte fehlt, werden die Standardwerte genommen. Bei Schalen ist das der 1. und der 5. Punkt, bei Balken hängt es vom Querschnitt ab.
Die folgenden Datenzeilen enthalten die Elementvariablen. Wird keine Druckausgabe angefordert erfolgt keine Ausgabe.

181 von 324 Universität Karlsruhe (TH)Rechenzentrum
*ENERGY PRINT[,FREQUENCY=I]
Gibt Informationen über die gesamte Energie im Modell aus.
*PRINT[,FREQUENCY=I][,RESIDUAL={YES|NO}][,SOLVE={YES|NO}]
Informationen über die Residuen bei den Iterationen werden ausgegeben. Falls SOLVE=YES gesetzt ist, werden Informationen über die Gleichungen und die Wavefront ausgegeben.
Die Informationen werden in das Message-File id.msg geschrieben.

182 von 324 Universität Karlsruhe (TH)Rechenzentrum
Ausgabe auf Ergebnis-Datei
Die Ausgabe auf Datei ist ähnlich wie die Druckausgabe gesteuert.*NODE FILE
*EL FILE
*ENERGY FILE
mit denselben Parametern und Datenzeilen wie bei der Druckausgabe.
Es können im Unterschied zur Druckausgabe nicht einzelne Komponenten geschrieben werden, sondern immer nur die gesamte Vektor- bzw. Tensorgröße.
Die Ausgabedatei ist im binären Format und wird für das Postprocessing mit HyperMesh, MSC.Patran und anderen Postprozessoren benötigt. Man kann die Datei auch im ASCII-Format erzeugen. Dazu gibt man die Option*FILE FORMAT=ASCIIein.

183 von 324 Universität Karlsruhe (TH)Rechenzentrum
Ausgabe in die ODB
Die Datei id.odb wird von ABAQUS/CAE bzw. ABAQUS/Viewer für das Postprocessing gelesen.
Prozedurspezifische Ausgabe*OUTPUT,{FIELD|HISTORY}[,FREQUENCY=I][,MODE LIST][,OP={NEW|ADD|REPLACE}][,VARIABLE={ALL,PRESELECT}]
FIELD fordert Variable an für Kontourplots, Animationen, Verschiebungsplotsusw.
HISTORY fordert Variable für XY-Plots an (z.B. Energievariable, einzelneKomponenten an speziellen Orten im Modell)
MODE fordert Eigenmodes an bei *MODAL DYNAMICLIST
OP bei Folgesteps kann die OUTPUT-Anweisung komplett ersetzt (NEW)bzw. ergänzt (ADD) werden. Bei REPLACE wird eine OUTPUT-Anweisung desselben Typs (d.h. FIELD oder HISTORY) undderselben Häufigkeit (FREQUENCY) ersetzt

184 von 324 Universität Karlsruhe (TH)Rechenzentrum
VARIABLE es kann eine bestimmte Vorauswahl von Element-, Knoten- undEnergievariablen, prozedurspezifisch gewählt werden(PRESELECT) oder alle Variable (ALL), die bei der Prozedurmöglich sind, angefordert werden. Eine Tabelle findet man imUser’s Manual, Vol. I, Kap. 4.1.3
Datenzeilen:
Liste von Eigenmodes, die in das ODB-File geschrieben werden sollen (wenn der Parameter MODE LIST gesetzt ist).

185 von 324 Universität Karlsruhe (TH)Rechenzentrum
Ausgabe von ausgewählten Variablen*OUTPUT,{FIELD|HISTORY}[,FREQUENCY=I][,OP={NEW|ADD|REPLACE}]
Dazu kommen dann weitere Anweisungen:
*ELEMENT OUTPUT[,ELSET=Set-Name][,VARIABLE={ALL,PRESELECT}][,POSITION={CENTROIDAL|INTEGRATION POINTS|NODES]
*NODE OUTPUT[,NSET=Set-Name][,VARIABLE={ALL,PRESELECT}]
*ENERGY OUTPUT[,ELSET=Set-Name][,VARIABLE={ALL,PRESELECT}]
und weitere. Falls die VARIABLE-Option nicht gesetzt ist, folgen Datenzeilen mit den Variablennamen, die in das ODB-File geschrieben werden sollen.

186 von 324 Universität Karlsruhe (TH)Rechenzentrum
Suchen und Findenvon Beispielen

187 von 324 Universität Karlsruhe (TH)Rechenzentrum
Schlüsselwörter
Häufig sucht man ein ABAQUS-Beispiel, in dem ein Schlüsselwort vorkommt, z.B. *ORIENTATION,SYSTEM=CYLINDRICAL.abaqus findkeyword [job=job-name][maximum=max-output]
Es folgen beliebig viele Zeilen, die Schlüsselwörter enthalten. Eine Leerzeile stößt die Suche an.
Es werden alle Beispieldatensätze, die in den Example Manuals, Verification Manuals und Seminarunterlagen für ABAQUS/Standard und ABAQUS/Explicit vorkommen, nach den Schlüsselwörter samt Parametern und Werten durchsucht.
job-name das Ergebnis der Suche wird in eine Dateijob_name.dat geschrieben, sonst in dieStandardausgabe
max-output limitiert die Anzahl an Beispielen, die ausgegebenwerden; Def. 100 pro Manual bzw. Unterlage

188 von 324 Universität Karlsruhe (TH)Rechenzentrum
Beispiel:abaqus findkeyword*orientation,system=cylindrical
Ausgabe: .......Searching in ABAQUS Example ProblemsMatches for line: ORIENTATION, SYSTEM = CYLINDRICAL : 16
Common matches : 16
boltpipeflange_3d_ortho discbrake_3ddiscbrake_3d_extrapara discbrake_3d_extrapara_300cdiscbrake_3d_separated discbrake_3d_xpldsatire_model laminpanel_s4_prebucklelaminpanel_s4r5_prebuckle laminpanel_s9r5_prebucklelaminpanel_stri65_prebuckle modelchangedemo_continuumsubmerged_cyl_cylinder thinsheetstretching_m3d9rthinsheetstretching_s4 thinsheetstretching_s4r.......
Es gibt also u.a. 16 Datensätze aus dem ABAQUS/Standard Example Manual mit der Zeile: *ORIENTATION,SYSTEM=CYLINDRICAL
189 von 324 Universität Karlsruhe (TH)Rechenzentrum
Extrahieren von Datensätzen
Will man einen Beispieldatensatz nachrechnen oder für das eigene Problem modifizieren, zieht man ihn aus der Beispielsammlung, die im ABAQUS-Installationsverzeichnis liegt heraus.abaqus fetch job=job-name [input=input-file]
Dabei ist
job-name der Name der Beispieldatei
input-file ein alternativer Name, den das extrahierte Beispielerhalten soll.Der Datensatz wird dann im Arbeitsverzeichnisabgelegt.

190 von 324 Universität Karlsruhe (TH)Rechenzentrum
ABAQUS Umgebung

191 von 324 Universität Karlsruhe (TH)Rechenzentrum
ABAQUS Environment File
Im Environment-File sind Parameter gesetzt, die die Ressourcen und den Verlauf des ABAQUS-Jobs festlegen.
Eine Beschreibung findet man im ABAQUS Site Guide und im ABAQUS Analysis User’s Manual I (3.3.1), die aktuelle Besetzung erhält man durch Eingabe vonabaqus job=id information=environment
ABAQUS wertet 3 Environment-Files aus in der Reihenfolge• im Installationsverzeichnis:
/installationsverzeichnis/abaqus/6.7-1/site/abaqus_v6.env
• Benutzer-Home-Verzeichnis: abaqus_v6.env• Arbeitsverzeichnis: abaqus_v6.env
Man kann durch Anlegen und editieren einer Datei abaqus_v6.env das ABAQUS Environment verändern, in dem man hier die Vorbesetzungen der Parameter ändert.

192 von 324 Universität Karlsruhe (TH)Rechenzentrum
Die meisten Parameter sollten vom Benutzer nicht geändert werden. Manche sollten jedoch an das ABAQUS-Problem angepaßt werden. Diese sind (mit ihren Werten im Standard-Environment-File):
pre_memory=33554432 Memory für ABAQUS-Pre in 64-Bit-Wortenstandard_memory=33554432 Memory für ABAQUS-Standard in
64-Bit Worten
Das entspricht jeweils 256 MByte. Die Größen können u.a. auch in MByte angegeben werden:
pre_memory="256mb"standard_memory="256mb"
Das Scratchfilesystem kann durch den Parameter
scratch=directory
gesetzt werden. Standardmäßig ist scratch=/tmp gesetzt. Je nach Plattenplatzbedarf oder auch an speziellen Rechnern ist es u.U. nötig, den Wert zu ändern.

193 von 324 Universität Karlsruhe (TH)Rechenzentrum
Hauptspeicherbedarf
• Informationen über den Hauptspeicherbedarf während der Analyse erhält man aus der Druckausgabedatei:
abaqus datacheck job=id ...
• für jeden Step werden Informationen über benötigte Ressourcen ausgegeben
M E M O R Y A N D D I S K E S T I M A T E
SUMMARY FOR CURRENT NODE ORDERING (NOTE THAT IF NODE ORDERING CHANGES THE SIZE ESTIMATES FOR THE STEPS WILL CHANGE)
STEP MAXIMUM DOF FLOATING PT MINIMUM MEMORY MEMORY TO REQUIRED DISKSPACE WAVEFRONT OPERATIONS REQUIRED MINIMIZE I/O PER ITERATION (MBYTES/MWORDS) (GBYTES/MWORDS) (GBYTES/GWORDS)
1 5100 3.21E+11 276.53/36.24 1.47/197.03 1.28/172.07
---- --------- ------------ ------------- ------------- ------------- MAX 5100 3.21E+11 276.53/36.24 1.47/197.03 1.28/172.07
• die ABAQUS-Environmentvariable standard_memory muss mindestens den Wert in der Spalte unter MINIMUM MEMORY REQUIRED haben
• in der Spalte MEMORY TO MINIMIZE I/O steht der Wert des Speicherbedarfs, der die Ein-/Ausgabeoperation minimiert

194 von 324 Universität Karlsruhe (TH)Rechenzentrum
• Der ABAQUS-Lauf kann anschließend mit
abaqus continue job=id ...
fortgesetzt werden.• Der Hauptspeicherbedarf für ABAQUS-PRE pre_memory muß abgeschätzt
werden und hängt von der Anzahl der Freiheitsgrade ab:
P R O B L E M S I Z E
NUMBER OF ELEMENTS IS 53752
NUMBER OF NODES IS 59694
NUMBER OF NODES DEFINED BY THE USER 59694
TOTAL NUMBER OF VARIABLES IN THE MODEL 179082
(DEGREES OF FREEDOM PLUS ANY LAGRANGE MULTIPLIER VARIABLES)
• die Vorbesetzung von 256 MBytes für pre_memory ist für 250 000 Freiheitsgrade ausreichend

195 von 324 Universität Karlsruhe (TH)Rechenzentrum
Typischer Zusammenhang zwischen Freiheitsgraden und Pre_Memory

196 von 324 Universität Karlsruhe (TH)Rechenzentrum
Plattenplatzbedarf
• während der Analyse werden große temporäre Dateien erzeugt
ESTIMATED FILE SIZES
FILE MWORDS GBYTES
.fct 154.650 1.152
.nck 1.290 0.010
.opr 16.126 0.120
------- ------- -------
TOTAL 172.066 1.282
• anhand dieser Informationen muss u.U. das Scratchfilesystem ausgewählt werden

197 von 324 Universität Karlsruhe (TH)Rechenzentrum
ABAQUS am RZ
ABAQUS gibt es für alle gängigen Unix-Systeme, einschließlich Linux, und für Windows NT/2000/XP.
Am RZ kann ABAQUS auf 4 Ebenen genutzt werden:
HP XC6000 Cluster (XC1)HP XC4000 Cluster (XC2)WorkstationsPC’s unter Windows, Linux
Berechnung großer Probleme• Erzeugung der Eingabedatei an irgendeiner Maschine mit einem Editor,
ABAQUS/CAE, HyperMesh oder MSC.Patran• Rechnung im Batch an einem der Parallelrechner• Postprocessing an irgendeiner Maschine mit ABAQUS/CAE, ABAQUS/Viewer,
HyperMesh oder MSC.Patran

198 von 324 Universität Karlsruhe (TH)Rechenzentrum
ABAQUS-Aufruf
Aufruf:abaqus job=id
[analysis|datacheck|continue|help|syntaxcheck|
information={environment|local|memory|release|status}]
[input=input-file][user=source-file][oldjob=oldjob-id]
[fil={append|new}][memory=memsize]
[interactive|background][scratch=scratch-dir]
[parallel={supernode|tree}][cpus=anzahl_der_cpus]
[output_precision={single|full}]
Viele Parameter können auch (alternativ) im ABAQUS Environment-File gesetzt werden. Genaue Beschreibungen aller möglichen Parameter stehen im ABAQUS Analysis User’s Manual, Kap. 3.2.2

199 von 324 Universität Karlsruhe (TH)Rechenzentrum
Standardaufruf:abaqus job=id [input=input-file][oldjob=oldjob-id]
id ist die Kennung des Jobs, alle erzeugten Dateienerhalten den Namen id.extension
input-file falls die Eingabedatei nicht id.inp heißt, muß ihr Namehier angegeben werden
oldjob-id ist die Job-Id eines vorherigen ABAQUS-Jobs auf den einRestart aufsetzt. Dieser Parameter muß also immervorhanden sein, wenn im Eingabe-File ein*RESTART,READ vorkommt

200 von 324 Universität Karlsruhe (TH)Rechenzentrum
ABAQUS auf den Linux Clustern
Das Rechenzentrum betreibt als Höchstleistungsrechner zwei Linux-Cluster:
HP XC6000 ist ein System aus 101 Rechenknoten mit jeweils 2 Itanium2Prozessoren und 2 Rechenknoten mit jeweils 8 Prozessoren, die mit einem Quadrics II Kommunikationsnetzwerk verbunden sind.
HP XC4000 ist ein System aus 750 Rechenknoten mit jeweils zwei Dual CoreOpteron Prozessoren, die mit einem InfiniBand Interconnectverbunden sind.
Dazu kommen jeweils noch weitere Service- und Fileserverknoten und viele TBytes große Dateisysteme. Genaue Informationen findet man auf der RZ Webseite
http://www.rz.uni-karlsruhe.de/ssck/ssck.php
Große Probleme sollten unter Kontrolle des Job Management Systems gerechnet werden. Das JMS richtet die Job-Umgebung ein und stellt die Ressourcen wie CPU-Zeit, Hauptspeicher und Anzahl der Prozessoren bereit.

201 von 324 Universität Karlsruhe (TH)Rechenzentrum
Scratchfilesysteme
• SFS ist ein globales Filesystem, welches als Scratchfilesystem oder auch als temporäres Filesystem verwendet werden kann. Der Zugang erfolgt üblicherweise über die Umgebungsvariable $WORK.Im ABAQUS Environmentfile werden $-Zeichen nicht interpretiert. Daher muß man den Inhalt von $WORK explizit angeben, also:scratch="/home/ssck/groupid/userid"
• Es gibt an jedem Knoten ein lokales Filesystem, das als Scratchfilesystem genutzt werden kann, d.h. die Dateien sind am Ende des ABAQUS-Jobs automatisch gelöscht; das lokale Filesystem wird über die Variable $TEMP angesprochen.Auch hier muß man wegen des $-Zeichens das Verzeichnis explizit angeben. Da das Verzeichnis den Namen dynamisch bezieht, kennt man ihn nicht im Vorhinein.
• Der komfortableste Weg, Scratch-Verzeichnisse festzulegen, führt über die Möglichkeit, im ABAQUS-Environmentfile Python-Script-Anweisungen platzieren zu können:
import osscratch=os.environ[’WORK’]
entsprechend auch für TEMP.

202 von 324 Universität Karlsruhe (TH)Rechenzentrum
ABAQUS Umgebung auf den HP XC Clustern
ABAQUS Environmentvariable (mit Vorbesetzung):
pre_memory="256mb"standard_memory="1024mb"
import osscratch=os.environ[’WORK’]
Je nach Bedarf sollte der Anwender eine oder mehrere dieser Variable in seinem lokalen ABAQUS Environmentfile modifizieren.

203 von 324 Universität Karlsruhe (TH)Rechenzentrum
Job-Submit auf den HP XC Clustern
abqjob -j id -t time -m memory [-c jobclass][-p procs][-d node][-T time][-i inputfile][-o oldjob-id][-f {append|new}][-u source-file][-D direct_solver][-s optionstring]
-j id Jobkennung
-t time CPU-Zeit in Minuten
-m memory Hauptspeicherbedarf in MByte
-p procs Anzahl der Prozessoren (Vorbestetzung: 1)
-d Knotentypt für dünne (thin) Knoten=Knoten mit 2 Prozessoren (=Vorbes.)f für dicke (fat) Knoten=Knoten mit 8 Prozessoren
-T time max. Realzeit in Minuten (Vorbesetzung: 1.1*CPU-Zeit)
-i inputfileName einer Eingabedatei, die nicht id.inp heißt.

204 von 324 Universität Karlsruhe (TH)Rechenzentrum
-c jobclass es gibt zwei Jobklassen:p für Production (=Vorbesetzung) undd für DevelopmentDurch Eingabe von job_class bekommt man dieRessourcen dieser Klassen angezeigt.
-o oldjob-idKennung eines schon gerechneten Jobs, wenn ein Restarterfolgen soll
-u user-sub Name eines Fortran-Quellprogramms oder Objekt-Files, das inden ABAQUS-Job eingebunden werden soll
-D solver wenn parallel gerechnet wird (p<1) und der direkte Solverbenutzt werden soll, muß " -D y " angegeben werden, sonstwird der DDM Solver verwendet
-s string hier können weitere Optionen aus dem ABAQUS-Aufrufen(eingeschlossen in ") eingegeben werden.

205 von 324 Universität Karlsruhe (TH)Rechenzentrum
Spezielle Problemlösungen

206 von 324 Universität Karlsruhe (TH)Rechenzentrum
Eigenfrequenzen und -moden
Die *FREQUENCY-Prozedur zieht aus der Schwingungsgleichung
die Eigenfrequenzen und Eigenmoden.• die Struktur kann vorbelastet werden• als Unteroption von *ELASTIC muß die Dichte angegeben werden (*DENSITY)
*FREQUENCY[,NORMALIZATION={DISPLACEMENT|MASS}][,EIGENSOLVER={LANCZOS|SUBSPACE}][,BIAS=α][,USER BOUNDARIES][,NUMBER INTERVALL=N]
• Es folgen 1 oder 2 Datenzeilen, abhängig davon, wie der EIGENSOLVER-Parameter gesetzt ist, durch den die Extraktionsmethode für die Eigenwerte und -vektoren gewählt wird.
• Der NORMALIZATION-Parameter legt fest, wie die Eigenvektoren normiert werden.
Mu·· t( ) Ku t( )+ 0=

207 von 324 Universität Karlsruhe (TH)Rechenzentrum
Falls die Lanczos-Methode gewählt wird und parallelisiert gerechnet werden soll, können weitere Parameter gesetzt werden. Diese legen Bereichsgrenzen des Frequenzintervalls fest, das berechnet werden soll. Es müssen mindestens so viele CPU’s angefordert werden, wie es Frequenzbereiche gibt.
NUMBER INTERVALL Anzahl der Frequenzbereiche, falls dieserParameter fehlt, wird 1 Bereich angenommen
BIAS bestimmt die Bereichsgrenzen bi:
ωmax und ωmin sind die Grenzen des Frequenzbereiches; wenn α=1 gewählt wirdder Bereich in N gleiche Intervalle unterteilt.
USER BOUNDARIES Bereichsgrenzen werden in einer Datenzeile festgelegt.
BIAS und USER BOUNDARIES schließen sich gegenseitig aus!
bi ωmax ωmin∠( ) 1 αi∠
1 αN∠------------------ α 1≠ i N 1∠≤,,⋅=

208 von 324 Universität Karlsruhe (TH)Rechenzentrum
Lanczos-Methode
• besonders für eine große Anzahl von Eigenwerten-/moden geeignet• parallelisiert; Frequenzbereich muß in Intervalle aufgeteilt werden, pro CPU wird
ein Intervall bearbeitet
1. Datenzeile:
N,νMin,νMAX,λ
N Anzahl der Eigenwerte und -moden, die berechnet werden sollen
νMIN,νMAX minimale bzw. maximale Frequenz, bis zu der die Eigenwerte und moden berechnet werden sollen; falls NUMBER INTERVALL > 1 ist,müssen diese Werte gesetzt werden
λ Verschiebungspunkt; die Eigenwerte, die diesem Punkt am nächstenliegen, werden extrahiert
Weitere Daten in der Zeile werden nicht besprochen. Hierfür werden die Standardvorbesetzungen empfohlen.

209 von 324 Universität Karlsruhe (TH)Rechenzentrum
2. Datenzeile:
Hier werden bis zu 8 Zahlen pro Zeile eingegeben, die die Frequenzbereichsgrenzen festlegen. Diese Datenzeile muß eingegeben werden, wenn
NUMBER INTERVALL=N > 1 undUSER BOUNDARIES
in der *FREQUENCY-Option angegeben wurde. Es müssen genau N-1 Werte eingegeben werden.

210 von 324 Universität Karlsruhe (TH)Rechenzentrum
Subspace-Iteration-Methode
Datenzeile:
N,νMAX,λ,NV,IMAXN Anzahl der Eigenwerte und -moden, die berechnet werden
sollen
νMAX maximale Frequenz, bis zu der die Eigenwerte und -moden berechnet werden sollen
λ Verschiebungspunkt; die Eigenwerte diesem Punkt am nächstenliegen, werden extrahiert
NV Anzahl der Vektoren, die für die Unterraum-Iteration verwendet werden sollen (Default: das System wählt aus)
IMAX Maximale Anzahl an Iterationen (Default: 30)• falls sowohl N, als auch νMAX angegeben werden, wird das Kriterium genommen,
das zuerst erfüllt ist• je größer NV ist, desto schneller konvergiert das Verfahren, aber um so mehr
Hauptspeicher ist nötig; NV~2N

211 von 324 Universität Karlsruhe (TH)Rechenzentrum
Bemerkungen• die Frequenzen werden in [Umdrehungen/Zeiteinheit] gemessen• der Verschiebungspunkt λ muß in [Umdrehungen/Zeiteinheit]2 angegeben werden• die Angabe eines Verschiebungspunktes ist notwendig, wenn die Struktur
Starrkörperfreiheitsgrade (und somit Nullfrequenzmoden) hat. Die niedrigsten N Werte von |ωmax
2 -λ| werden berechnet.
Beispiel: Schwingungen eines Kabels unter Spannung
P

212 von 324 Universität Karlsruhe (TH)Rechenzentrum
*HEADING..*STEP,NLGEOM1. Step: Vorspannung des Kabels*STATIC*CLOAD14,1,500.*NODE FILEU*EL PRINTS,MISES,E*NODE PRINTU,RF,CF*END STEP********************************STEPStep 2: Die ersten 4 Eigenwerte*FREQUENCY4*END STEP

213 von 324 Universität Karlsruhe (TH)Rechenzentrum
Dynamische Probleme
Zu lösende Differentialgleichung
M ist die Massenmatrix
C die Dämpfungsmatrix
K die Steifigkeitsmatrix
P der Lastvektor
u der Verschiebungsvektor
Mu·· t( ) Cu· t( ) Ku t( )+ + P t( )=

214 von 324 Universität Karlsruhe (TH)Rechenzentrum
Explizite Zeitintegration
• Diskretisierung der Zeit und der Zeitableitung (zentrale Differenzenmethode)• Auswertung der Bewegungsgleichung zur Zeit t• u(t+Δt) hängt ausschließlich von Größen zur Zeit t und früher ab
Vorteil:
Häufig sind M und C diagonal, es müssen keine Gleichungssysteme gelöst werden
Nachteil:• bedingte Stabilität• Zeitinkrement muß kleiner als eine kritische Größe 2/ωmax sein, wobei ωmax die
größte signifikante Eigenfrequenz der Struktur ist• daher nur für kurzzeitige Prozesse mit wenigen Zeitschritten geeignet.

215 von 324 Universität Karlsruhe (TH)Rechenzentrum
Implizite Zeitintegration
• u(t+Δt) hängt auch von anderen Größen zur Zeit t+Δt ab• das bedeutet, daß u(t+Δt) durch Lösen von Gleichungssystemen in jedem
Zeitschritt ermittelt werden muß• nach der Art, wie die Zeit und die Zeitableitungen diskretisiert werden,
unterscheidet man verschiedene Methoden, z.B.- Houboltsche Methode- Wilsonsche Θ-Methode- Newmarksche Methode
Die Wilsonsche und die Newmarksche Methode enthalten freie Parameter (Θ bzw. β,γ) über die man das Stabilitätsverhalten der Lösung verbessern kann.
Implizite Verfahren sind stabil, aber aufwendig.

216 von 324 Universität Karlsruhe (TH)Rechenzentrum
Modale Superposition
• Entwicklung von u nach den ersten p Eigenmoden der Struktur• die Ordnung des Systems reduziert sich von n auf p• falls die Dämpfung vernachlässigt oder durch eine Diagonalmatrix approximiert
werden kann, sind alle Matrizen diagonal und das System entkoppelt in p Gleichungen zu je einem Freiheitsgrad
• Zeitintegration wird exakt durchgeführt
Die Methode ist sehr ökonomisch bei linearen Systemen, da die Transformation und Rücktransformation nur einmal durchgeführt werden muß.

217 von 324 Universität Karlsruhe (TH)Rechenzentrum
Dynamische Berechnungen in ABAQUS
explizite Verfahren spezielles Programm ABAQUS/Explicit fürkurzzeitdynamische Vorgänge und geometrischnichtlineare Probleme mit großen Verschiebungen
implizite Verfahren Hilber-Hughes-Taylor (=modifizierte Newmark-Methode)
Unterraum-Projektionsmethode
über *DYNAMIC
modale Superposition über *MODAL DYNAMIC

218 von 324 Universität Karlsruhe (TH)Rechenzentrum
DYNAMIC
Hilber-Hughes-Taylor*DYNAMIC[,ALPHA=α][,DIRECT][,HAFTOL=haftol][,INITIAL=NO][,NOHALF]
Datenzeile:
TINC,TTOTAL,TMIN,TMAX
Die Hilber-Hughes-Taylor-Methode enthält einen freien Parameter α zur Steuerung der numerischen Dämpfung:
α=0 keine Dämpfungα=-1/3 maximale Dämpfungα=-0.05 Standard
Wenn der DIRECT-Parameter gesetzt ist, wird mit fester Schrittweite TINC bis TTOTAL integriert. Der NOHALF-Parameter unterdrückt dann die Berechnung des Half-Step-Residuums
α 1∠ 3⁄ 0,[ ]∈

219 von 324 Universität Karlsruhe (TH)Rechenzentrum
Wenn der HALFTOL-Parameter gesetzt wird, wird mit variabler Schrittweite gerechnet, wobei TINC ein anfängliches Inkrement ist.
TMIN ist ein minimales Zeitinkrement(Standardvorbesetzung: MIN(TINC,10-5TTOTAL)
TMAX maximal zugelassenes Zeitinkrement (keine Vorbesetzung)
Mit dem HAFTOL-Parameter wird die Schrittweite gesteuert. Zu jedem Zeitpunkt wird iteriert, bis innerhalb einer Toleranz, Gleichgewicht herrscht. In der Mitte zwischen 2 Zeitschritten, also bei t+Δt/2, wird das Residuum
berechnet. Falls R größer als haftol ist, wird das Inkrement verkleinert.
Mu·· Cu· Ku P∠+ + R t Δt 2⁄+=

220 von 324 Universität Karlsruhe (TH)Rechenzentrum
Empfehlung für haftol: 0.1 - 10 mal Größenordnung von P (ohneReibung)
1 -100 mal der Größenordnung von P beiSystemen mit Reibung
ABAQUS berechnet standardmäßig zu Beginn eines jeden Steps die Beschleunigung. Falls INITIAL=NO gesetzt ist, wird auf die Beschleunigung des vorigen Steps aufgesetzt.
Der DIRECT- und HAFTOL-Parameter schließen sich gegenseitig aus.

221 von 324 Universität Karlsruhe (TH)Rechenzentrum
Unterraum-Projektion
Der Verschiebungsvektor wird nach den ersten p Eigenmodes entwickelt. Die somit entkoppelten p Bewegungsgleichungen werden mit einem expliziten Verfahren integriert. Die p Eigenmodes müssen vorher in einem *FREQUENCY-Step ermittelt werden.*STEP*FREQUENCYp
.
.*STEP*DYNAMIC,SUBSPACE,VECTORS=pTINC,TTOTAL
Als festes Zeitinkrement wird MIN(TINC,0.4/ωmax) gewählt, wobei ωmax die höchste der p Eigenfrequenzen ist.

222 von 324 Universität Karlsruhe (TH)Rechenzentrum
MODAL DYNAMIC
Für lineare Probleme ist die modale Superposition die geeignete Integrationsmethode.*MODAL DYNAMIC[,CONTINUE={YES,NO}]TINC,TTOTAL
Dieser Anweisung muß ein *FREQUENCY-Step vorangehen um die ersten p Eigenmodes zu bestimmen, wobei abgeschätzt werden muß, wieviele Modes signifikant sind.
Falls CONTINUE=YES gesetzt wird, werden für die Geschwindigkeiten Anfangsbedingungen gesetzt
• bei einem ersten *MODAL DYNAMIC Step aus *INITIAL CONDITION,TYPE=VELOCITY
• bei einem Folge-Step: aus den Geschwindigkeiten am Ende des vorigen Steps• Ausgabe von speziellen modalen Größen über*MODAL OUTPUT*MODAL PRINT*MODAL FILE

223 von 324 Universität Karlsruhe (TH)Rechenzentrum
Anfangsbedingungen
Anfangsgeschwindigkeiten können an jedem Knoten in Richtung und Größe vorgegeben werden:*INITIAL CONDITION,TYPE=VELOCITY[,INPUT=inputfile]N oder N-SET,DOF,VEL
N bezeichnet die Knotennummer bzw. die Knotengruppe, für die die N-SET Anfangsbedingung gelten soll
DOF der Verschiebungsfreiheitsgrad, der die Richtung derAnfangsbedinung festlegt
VEL Größe der Geschwindingkeitskomponente
Es können beliebig viele Datenzeilen eingegeben werden. Wenn die Datenzeilen in einer Datei inputfile stehen, können sie auch über den INPUT-Parameter eingelesen werden.

224 von 324 Universität Karlsruhe (TH)Rechenzentrum
Masse und Dämpfung
• Die Masse muß über die *DENSITY-Option in das System eingeführt werden.
• Dämpfung aufgrund der Materialeigenschaften wird- bei direkten Integrationsverfahren (explizit oder implizit) durch die*DAMPING-Option
- bei indirekten Verfahren (modale Superposition) durch die*MODAL DAMPING-Option
berücksichtigt.

225 von 324 Universität Karlsruhe (TH)Rechenzentrum
Kritische Dämpfung
Dämpfungsmaß des i-ten Modes: ξi= ci/cr; cr ist die kritische Dämpfung
ξi liegt zwischen 1% und 10%
*MODAL DAMPING,DIRECTn,m,ξ..
n,m sind Zahlen, die einen Moden-Bereich bezeichnen, für die dasDämpfungsmass ξ gelten soll. Falls m fehlt, gilt das Dämpfungsmaßnur für den n-ten Mode
Es können beliebig viele Zeilen eingegeben werden.

226 von 324 Universität Karlsruhe (TH)Rechenzentrum
Rayleigh Dämpfung
Dämpfungsmatrix: C = αRM + βRK; wobei M die Massenmatrix und K dieSteifigkeitsmatrix ist
Bei direkter Integration:*DAMPING,ALPHA=αR,BETA=βR
Bei modaler Superposition:*MODAL DAMPING,RAYLEIGHn,m,αR,βR ..
n,m sind Zahlen, die einen Moden-Bereich bezeichnen, für die dieKonstanten αR und βR gelten soll. Falls m fehlt, gilt dasDämpfungsmaß nur für den n-ten Mode
Es können beliebig viele Zeilen eingegeben werden.

227 von 324 Universität Karlsruhe (TH)Rechenzentrum
Materialabhängige Dämpfung
Es werden im *FREQUENCY-Step die Dämpfungsmaße für jedes Material berücksichtigt und daraus das Dämpfungsmaß für die Modes berechnet.
In jeder Material-Definition muß das für dieses Material gewünschte Dämpfungsmaß gesetzt werden:*DAMPING,COMPOSITE=ξm
Im *MODAL DYNAMIC-Step folgt dann:*MODAL DAMPING,MODAL=COMPOSITEn,m..
n,m sind Zahlen, die einen Moden-Bereich bezeichnen
Es können beliebig viele Zeilen eingegeben werden.

228 von 324 Universität Karlsruhe (TH)Rechenzentrum
3. Beispiel: Eingespannter Balken
Einseitig eingespannter Balken mit rechteckigem Querschnitt• Länge: 200 mm, Breite: 50 mm, Höhe: 5 mm• E-Modul: 2*105 N/mm2, Poisson-Zahl: 0.3, Dichte: 2.3*10-5 kg/mm3 • senkrechte Kraft auf das freie Ende: 1200 N
1. Step: statische, lineare Analyse: Auslenkung des Balkens
2. Step: dynamische Analyse: Schwingungen des Balkens

229 von 324 Universität Karlsruhe (TH)Rechenzentrum
*HEADING 3. BEISPIEL: EINGESPANNTER BALKEN*NODE 1, 0.000, 0.000 3, 40.000, 0.000 5, 80.000, 0.000 7, 120.00, 0.000 9, 160.00, 0.000 11, 200.00, 0.000 *NSET,NSET=SPITZE11*ELEMENT,TYPE=B21,ELSET=BEAMS 1, 1, 3 2, 3, 5 3, 5, 7 4, 7, 9 5, 9, 11*BEAM SECTION,SECTION=RECT,ELSET=BEAMS,MATERIAL=MATEA50., 5.*MATERIAL,NAME=MATEA*ELASTIC2.E5,.3*DENSITY2.3E-5*DAMPING,ALPHA=0.25,BETA=0.003*BOUNDARY1,1,21,6

230 von 324 Universität Karlsruhe (TH)Rechenzentrum
*STEP AUSLENKUNG AUS DER RUHELAGE*STATIC*CLOAD 11, 2, -1200.*OUTPUT,HISTORY,FREQUENCY=1*NODE OUTPUT,NSET=SPITZEU*END STEP*STEP,INC=100 AUSSCHWINGEN*DYNAMIC,INITIAL=YES,HAFTOL=1200..1,5.0*CLOAD11,2,0.0*END STEP

231 von 324 Universität Karlsruhe (TH)Rechenzentrum

232 von 324 Universität Karlsruhe (TH)Rechenzentrum
Wärmetransport
Neben den anderen Berechnungsarten, wie z.B. Statik, Dynamik können auch Wärmetransport-Probleme mithilfe der *HEAT TRANSFER Prozedur gelöst werden. Dabei können die Probleme • Wärmeleitung• Wärmeströmung (Konvektion)• Wärmestrahlung
behandelt werden.
Lineare oder nichtlineare, stationäre oder instationäre Probleme können ebenfalls gelöst werden.
=Wärmequellen (-senken) dichte
∇ k ∇θ⋅⎝ ⎠⎛ ⎞ q·+ ρcθ·=
q·

233 von 324 Universität Karlsruhe (TH)Rechenzentrum
Randbedingungen
• Vorgegebene Temperaturauf den Randknoten θ = θ1
• Wärmeübergangdurch den Randq2= h(θ2
− θ∞)
• Strahlung
q3= σε(θ34 − θ∞
4)
k=Wärmeleitfähigkeith=Wärmeübergangskoeffizientσ=Stefan-Boltzmann-Konstanteε = Emissivität
θ1 θ∞
θ2
θ3θ∞
q3
q2
θ( )x t,

234 von 324 Universität Karlsruhe (TH)Rechenzentrum
instationär:
mit ( ) oder ohne ( ) Wärmequellen (-senken)
stationär:
mit oder ohne Wärmequellen (-senken)
nichtlinear: Materialkonstanten oder Randbedingungen
sind temperaturabhängig
θ· 0≠
q· 0≠ q· 0=
θ· 0=

235 von 324 Universität Karlsruhe (TH)Rechenzentrum
Elemente mit Temperatur-Freiheitsgrad
Heat Transfer Elemente beginnen entweder mit
• DCnDm Kontinuums-Wärmeleitungselemente oder • DCCnDm Kontinuums-Wärmeleitungselemente mit Konvektion• DSm Schalenelemente mit Wärmeleitung
Sämtliche Heat Transfer Elemente unterstützen die Ausgabe von Temperatur in der Art, daß sie direkt von dem entsprechenden Verschiebungs-Element als „Belastung“ über die *TEMPERATURE-Option übernommen werden kann.
Beispiel:
CPS4 ist das zu DC2D4 äquivalente Spannungselement.

236 von 324 Universität Karlsruhe (TH)Rechenzentrum
Beschreibung der Materialeigenschaften
Im Material-Eingabedatensatz unter der *MATERIAL-Option muß die• Wärmeleitfähigkeit (*CONDUCTIVITY)• im instationären Fall zusätzlich sowohl die spezifische Wärmekapazität
(*SPECIFIC HEAT) als auch die Dichte (*DENSITY)
eingegeben werden.
Beispiel: Kennwerte für einen Kalksandstein*MATERIAL,NAME=KALK*CONDUCTIVITY 1.6*SPECIFIC HEAT 1000.*DENSITY 2000.

237 von 324 Universität Karlsruhe (TH)Rechenzentrum
Anfangsbedingungen
Die Option *INITIAL CONDITIONS kann in Verbindung mit dem Parameter TYPE=TEMPERATURE dazu verwendet werden, einzelnen Knoten oder Knotengruppen eine Anfangstemperatur zuzuweisen. Sollte eine solche Zuweisung fehlen, wird der Wert standardmäßig zu Null gesetzt. Diese Option kann auch bei gekoppelter Temperatur-Spannungsberechnung verwendet werden.*INITIAL CONDITIONS,TYPE=TEMPERATURE][,INPUT=inputfile] N oder N-Set,T(1),T(2),etc.
N oder N-Set Knoten oder Knotengruppe auf die sich die Option bezieht.
T(i) Anfangswert der Knoten, wobei mehrere Werte erscheinen können und zwar für Schalenelemente je nach Anzahl der Querschnittspunkte.
Es können beliebig viele Datenzeilen eingegeben werden. Wenn die Datenzeilen in einer Datei inputfile stehen, können sie auch über den INPUT-Parameter eingelesen werden.

238 von 324 Universität Karlsruhe (TH)Rechenzentrum
Stationärer Fall
Eingabemuster eines stationären Wärmeübergangsproblems. *STEP*HEAT TRANSFER,STEADY STATE.....*BOUNDARY.....*CFLUX, .......*DFLUX, ........*FILM.....*ENDSTEP
Die Angabe von STEADY STATE vermittelt ABAQUS, daß es sich hierbei um einen stationären Vorgang handelt.

239 von 324 Universität Karlsruhe (TH)Rechenzentrum
Instationärer Fall
*HEAT TRANSFER[,DELTMX=DTMAX][,END={SS|PERIOD}]TINI,TTOTAL,TMIN,TMAX,DELTA
Dabei bedeuten
DTMAX Die maximal zulässige Temperatur-änderung während eines Inkrements
SS oder PERIOD Eine Abbruchbedingung für den Step
TINI Anfangs ZeitschrittTTOTAL GesamtzeitTMIN Minimal zulässiger ZeitschrittTMAX Maximal zulässiger ZeitschrittDELTA steht nur in Verbindung mit dem Parameter
END=SS, und stellt eine untere Grenze für die Temperaturveränderung dar

240 von 324 Universität Karlsruhe (TH)Rechenzentrum
TMAX kann beliebig gewählt werden (in sinnvoller Weise). Für TMIN gilt eine untere Schranke:
Δl ist der charakteristische Knotenabstand bzw. Seitenlänge der Elemente.
Falls die Schranke unterschritten wird, kann die Zeitintegration instabil werden.
tΔ ρc6k------Δl2≥

241 von 324 Universität Karlsruhe (TH)Rechenzentrum
Typische Struktur für den Aufruf eines instationären Fall.
*STEP*HEAT TRANSFER,DELTMX= ...,END= ........*FILM,OP=MOD, ..........*CFLUX, .......*DFLUX, ........*ENDSTEP
Durch die Eingabe von DELTMX und/oder END wird ABAQUS vermittelt, daß es sich um einen instationären Vorgang handelt.

242 von 324 Universität Karlsruhe (TH)Rechenzentrum
Lastarten bei Heat Transfer
Bei Wärmeleitungsproblemen wird die äußere Wärmezufuhr als Lastart behandelt. Es gibt zwei Möglichkeiten:
Eingabe einer konzentrierten Wärmezufuhr
Die Einheit ist Leistung=Energie/Zeit; z.B. W=J/sec
CFLUX
1 2
34 800 W

243 von 324 Universität Karlsruhe (TH)Rechenzentrum
CFLUX
*CFLUX[,AMPLITUDE=Name][,OP={MOD|NEW}]N oder N-Set,DOF,CFLUX
N oder N-Set Knoten oder Knotenset auf die sich die Belastung bezieht
DOF Freiheitsgrad (i.d.R. DOF=11)
CFLUX Referenzwert des Wärmefluß
Beispiel: *CFLUX4,11,800
• Anstelle von DOF=11 kann man auch ein Leerzeichen oder eine 0 eingeben. Bei Schalenelemente (DS4, DS8) haben die Temperatur-freiheitsgrade durch den Querschnitt die Nummern 11, 12, ...
• Falls eine Amplitude referiert wird, wird ein Wert für CFLUX ignoriert. Der AMPLITUDE-Parameter bezieht sich auf ein *AMPLITUDE, mit der ein zeitabhängiger Fluß definiert werden kann.

244 von 324 Universität Karlsruhe (TH)Rechenzentrum
DFLUX
Eingabe einer verteilten Wärmezufuhr
auf eine Elementseite (2D und 3D) oder auf den Randknoten eines Elements (1D).
Die Einheit ist Leistung/Fläche; z.B. W/m2
Falls eine Amplitude referiert wird, wird ein Wert für DFLUX ignoriert. Der AMPLITUDE-Parameter bezieht sich auf ein *AMPLITUDE, mit der ein zeitabhängiger Fluß definiert werden kann.
DFLUX
S 4
S 1
S 3750 W/m2 DC2D4
S 2

245 von 324 Universität Karlsruhe (TH)Rechenzentrum
DFLUX
*DFLUX[,AMPLITUDE=Name][,OP={MOD|NEW}]E oder E-Set,Sn,DFLUX
E oder E-Set Element oder Elementset
Sn n kennzeichnet Flächen- oder Seitennummerdes Elements, das beansprucht wird.
DFLUX Referenzwert der Wärmezufuhr
Auf das Beispiel bezogen folgt die Eingabe*DFLUX1,S4,750

246 von 324 Universität Karlsruhe (TH)Rechenzentrum
Wärmeübergang durch eine Oberfläche
Dieses Problem wird in ABAQUS mit der *FILM Option beschrieben. Dabei berechnet sich der Wärmefluß bezogen auf die Fläche mit der Formel
q=h(θ - θ∞)
h : ist der Wärmeübergangskoeffizient Einheit: Leistung/Fläche
θ : ist die aktuelle Temperatur an der Oberflächeθ∞ : ist die Umgebungstemperatur

247 von 324 Universität Karlsruhe (TH)Rechenzentrum
FILM
*FILM[,AMPLITUDE=Name][,FILMAMPLITUDE=Name][,OP={NEW|MOD}]E oder E-Set,Fn,TU,H
E oder E-Set Element oder Elementset
Fn n kennzeichnet die Flächen- oderSeitennummer des Elements,dasbeansprucht wird.
TU UmgebungstemperaturH Übergangskoeffizient
Falls eine der beiden oder beide Amplituden referiert werden, um eine Zeitabhängigkeit der jeweiligen Größe festzulegen, hat derentsprechende Wert in der Datenkarte keine Bedeutung.

248 von 324 Universität Karlsruhe (TH)Rechenzentrum
Beispiel aus der Bauphysik:
Wärmeübergang von der Luft in das Mauerwerk, dabei stellt h den Wärmeübergangskoeffizienten zwischen der Luft und der Oberfläche des Mauerwerks dar.
Auf das Beispiel bezogen folgt die Eingabe*FILM1,F4,288,23
El=1
Lufttemp.θ∞= 288 K
Oberfl.Temp. θ
h=23 W/m2K (DC2D4)

249 von 324 Universität Karlsruhe (TH)Rechenzentrum
4. Beispiel: Wärmetransport
In diesem Beispiel ist ein Wärmetransportproblem durch eine Mauer dargestellt. Zuerst erfolgt eine stationäre Berechnung, an diese schließt sich eine instationäre Wärmeberechnung an.
Es wird zum einen die Außentemperatur und die Strahlungsintensität durch eine Funktion beschrieben. Die Wärmeübergangskoeffizienten betragen außen 23 und innen 8 W/m2K.Die Dicke der Mauer beträgt 36 cm auf jeder Seite sind 2 cm Putz vorhanden.
Materialkennwerte: Stein Putz SI-Einh.Wärmeleitfähigkeit 1.0 0.2 W/m Kspez. Wärmekapazität 1000 1000 J/kg Kspez. Gewicht 2000 2000 kg/m3
Elementtyp: DC1D3
θ∞= 285 K θ∞= 285 K h=23 W/m2K h=8 W/m2K
0.02 0.020.32

250 von 324 Universität Karlsruhe (TH)Rechenzentrum
*HEADING BERECHNUNG DER TEMPERATUR-VERTEILUNG IM MAUERWERK*RESTART,WRITE*NODE 1,0.,0.,0. 3,0.02,0.,0. 9,0.34,0.,0. 11,0.36,0.,0.*NGEN 1,3,1 3,9,1 9,11,1*ELEMENT,TYPE=DC1D3 1,1,2,3*ELGEN,ELSET=ELALL 1,5,2,1*ELSET,ELSET=PUTZ 1,5*ELSET,ELSET=STEIN,GENERATE 2,4,1*SOLID SECTION,ELSET=STEIN,MATERIAL=STEIN*MATERIAL,NAME=STEIN*CONDUCTIVITY 1.0*SPECIFIC HEAT 1000.

251 von 324 Universität Karlsruhe (TH)Rechenzentrum
*DENSITY 2000.*SOLID SECTION,ELSET=PUTZ,MATERIAL=PUTZ*MATERIAL,NAME=PUTZ*CONDUCTIVITY 0.2*SPECIFIC HEAT 1000.*DENSITY 2000.*AMPLITUDE,NAME=SINK,VALUE=ABSOLUTE 0., 285., 37800., 290.7, 54000., 295., 86400., 290.*AMPLITUDE,NAME=STINT,VALUE=ABSOLUTE 0., 0., 21000., 0., 22000., 150., 25200., 20. 36900., 600., 42300., 720., 45000., 720., 51000., 600. 57000., 300., 61800., 0., 86400., 0.*STEP,INC=100 BERECHNUNG DER STARTWERTE ALS AUSGANGSTEMPERATUR*HEAT TRANSFER,STEADY STATE*FILM 1,F1,285.,23. 5,F2,285.,8.*EL PRINT,FREQUENCY=0*NODE PRINT NT*END STEP

252 von 324 Universität Karlsruhe (TH)Rechenzentrum
*STEP,INC=100 BERECHNUNG DES TEMPERATUR-VERLAUFS UEBER EINEN TAG*HEAT TRANSFER,DELTMX=3.0 130.,86400.,130.,2000.*FILM,OP=MOD,AMPLITUDE=SINK 1,F1, ,23. 5,F2, ,8.*DFLUX,AMPLITUDE=STINT 1,S1,1.0*EL PRINT,FREQUENCY=0*NODE PRINT NT*END STEP

253 von 324 Universität Karlsruhe (TH)Rechenzentrum
Temperatur-Spannungsberechnung
Ein typischer Berechnungsvorgang eines thermischen Spannungsproblems besteht aus zwei ABAQUS Jobs:
• einer *HEAT TRANSFER Analyse zur Ermittlung der Temperaturverteilung• und anschließend einer Spannungs-/Dehnungs-Analyse aufgrund der
Wärmeausdehnung. Das Temperaturfeld wird als Lastfall behandelt.
Die Knoten- und Elementnummerierung muß beibehalten werden. Die Elemente für die beiden Analysen müssen äquivalent sein.

254 von 324 Universität Karlsruhe (TH)Rechenzentrum
Materialeigenschaften
Neben E-Modul und Querkontraktionszahl und evt. Suboptionen von *ELASTIC, wie z.B. *PLASTIC, muß der Wärmeausdehnungs-koeffizient (*EXPANSION ) angegeben werden.
Beispiel:*MATERIAL,NAME=Materialname*ELASTICE-Modul,ν*PLASTICσi,εpliσi+1,εpli+1*EXPANSION[,TYPE={ISO|ORTHO|ANISO}]αth

255 von 324 Universität Karlsruhe (TH)Rechenzentrum
Belastungsgeschichte
Die sich ergebenden Spannungen resultieren aus der Verformung des Werkstoffs auf Grund geänderter Temperatur relativ zur Referenztemperatur oder zu Temperaturanfangswerten.
Muster für die Prozedur *STATIC:*STEP*STATIC.....*BOUNDARY.....*TEMPERATURE,........*END STEP

256 von 324 Universität Karlsruhe (TH)Rechenzentrum
Temperatur
Die Option *TEMPERATURE dient der Beschreibung eines Temperaturfelds. Dabei gibt es mehrere Möglichkeiten:
1. Eingabe von Stützstellen durch den Parameter AMPLITUDE *TEMPERATURE,AMPLITUDE=Name
2. Einlesen eines Input-Files*TEMPERATURE,INPUT=name.inp
3. Beschreibung durch eine User-Subroutine UTEMP*TEMPERATURE,USER
4. Einlesen der Daten von einem Results-File eines vorherigen ABAQUS Laufs (id.fil oder id.fin)*TEMPERATURE,FILE=Name[,ASCII][,BSTEP][,BINC][,ESTEP][,EINC]

257 von 324 Universität Karlsruhe (TH)Rechenzentrum
Temperatur-Verschiebungskopplung
• Die Kopplung von Temperatur und Verschiebung kann auch auf Element-Ebene erfolgen.
• Die Knoten haben dann sowohl Verschiebungs- als auch Temperaturfreiheitsgrade.
• Die Elementnamen haben ein T als Suffix.• Es müssen sowohl mechanische als auch thermische Kenngrößen bei
Materialeigenschaft angegeben werden.• Als Prozedur muß *COUPLED TEMPERATURE-DISPLACEMENT gewählt werden.• Mit *COUPLED TEMPERATURE-DISPLACEMENT kann sowohl transient, als auch
stationär gerechnet werden.

258 von 324 Universität Karlsruhe (TH)Rechenzentrum
Beispiel für Materialeingabe:*MATERIAL,NAME=Materialname*ELASTICE-Modul,ν*PLASTICσi,εpliσi+1,εpli+1*EXPANSION[,TYPE={ISO|ORTHO|ANISO}]αth
CONDUCTIVITYλ*SPECIFIC HEATc*DENSITYρ

259 von 324 Universität Karlsruhe (TH)Rechenzentrum
COUPLED TEMPERATURE-DISPLACEMENT
*COUPLED TEMPERATURE-DISPLACEMENT[,STEADY STATE][,DELTMX=TEMPMAX]
• falls STEADY STATE angegeben wird, erfolgt eine stationäre Rechnung, andernfalls wird transient gerechnet
• DELTMX gibt die maximal zugelassene Temperaturänderung pro Inkrement an. Datenkarte wie bei *HEAT TRANSFER (außer DELTA).

260 von 324 Universität Karlsruhe (TH)Rechenzentrum
Kontakt

261 von 324 Universität Karlsruhe (TH)Rechenzentrum
Beschreibung
Kontakt entsteht, wenn sich zwei feste Körper berühren und Kräfte über die gemeinsame Berührungsfläche übertragen werden.• in Normalenrichtung wird die Kontaktspannung übertragen, die proportional zur
Normalkomponente der äußeren Kraft ist.• in Tangentialrichtung entsteht eine Scherkraft, die von der Tangentialkomponente
der äußeren Kraft, der Kontaktspannung und der Oberflächenbeschaffenheit, dem Reibungskoeffizient, abhängt.
Kontakt ist ein extrem nichtlinearer Effekt: es gibt keinen stetigen Übergang zwischen Kontakt und Nichtkontakt.
Kontakt kann über Flächen verteilt oder lokal konzentriert sein.
Kontakt wird modelliert zwischen Körpern, von denen• einer deformierbar ist und der andere starr• beide deformierbar sind• Sonderfall: Selbstkontakt

262 von 324 Universität Karlsruhe (TH)Rechenzentrum
Bei der Kontaktmodellierung wird unterschieden zwischen• Finite Sliding: die Verschiebung der beiden Körper gegeneinander kann beliebig
sein• Small Sliding: die relative Verschiebung ist klein
Kontakt wird durch eine Zwangsbedingung beschrieben, in der alle Punkte, die Kontakt haben können berücksichtigt werden.
h(ui) ist eine nichtlineare Funktion der Verschiebungsfreiheitsgrade, für die gilt
h < 0 wenn keine der Freiheitsgrade ui in Kontakt ist
h > 0 wenn mindestens für einen Freiheitsgrad ein Kontakt hergestellt ist
Diese Form von Kontakt heißt harter Kontakt.
Der Übergang zwischen Kontakt und Nichtkontakt kann stetig gewählt werden(weicher Kontakt), z.B. wenn die Kontaktbedingung Toleranzen hat oder die Kontaktflächen weich sind (z.B. Dichtungen, beschichtete oder adhäsive Oberflächen, usw.)

263 von 324 Universität Karlsruhe (TH)Rechenzentrum
Lagrange-Formulierung
Im Allgemeinen ist h = h(ui). Kontaktbedingung wird in ABAQUS als Lagrange-Multiplikator im Energiefunktional eingeführt:
Π*(u,p) = Π(u,p) + p.A.h(u)
• Die 2. Variation von Π* enthält die Krümmung der Kontaktfläche. Dieser liefert einen nichtsymmetrischen Beitrag zur Steifigkeitsmatrix bei Finite Sliding.
• Die Kontaktfläche sollte so glatt wie möglich sein. Knicke führen zu Singularitäten in der Krümmung und verhindern u.U. Konvergenz von Kontaktbedingungen.
• Die Lagrangemultiplikatoren werden intern als zusätzliche Freiheitsgrade behandelt (Informationen in ABAQUS-Pre).
h h < 0 --> Kontaktrandbedingung erfüllth > 0 --> Kontaktrandbedingung nicht erfüllt
Kontaktdruck Kontaktfläche

264 von 324 Universität Karlsruhe (TH)Rechenzentrum
Master-Slave-Prinzip
Behandlung der Kontaktflächen erfolgt nach dem sog. Master-Slave-Verfahren.• eine Fläche ist der Master, die andere der Slave• da die Struktur diskretisiert ist, sind auch die Kontaktflächen diskretisiert• die Knoten des Slaves kontaktieren die Segmente des Master
Master
Slave

265 von 324 Universität Karlsruhe (TH)Rechenzentrum
• Slave-Knoten können die Master-Oberfläche (Segmente) nicht durchdringen• Knoten auf der Master-Oberfläche können die Slave-Oberfläche durchdringen• Kontaktrichtung ist normal zur Master-Oberfläche, entsprechend auch die
Normalkomponente der Kontaktkraft• Reibungskräfte sind tangential zur Master-Oberfläche
Überlappungen und Durchdringungen der Kontaktoberflächen verletzen die allgemeine Kompatibilitätsbedingung der Finite-Elemente-Methode• fehlerhafte Ergebnisse• lokale Oszillationenen der Kontaktspannungen
Daher• die Slave-Oberfläche muß dichter vernetzt sein als die Master-Oberfläche• bei gleicher Netzdichte sollte der Master "fester" sein als der Slave

266 von 324 Universität Karlsruhe (TH)Rechenzentrum
Kontaktflächen
Bei einem Kontaktproblem muß festgelegt werden:• woraus setzen sich die Kontaktflächen zusammen• welche Flächen treten (paarweise) in Kontakt• welche Fläche ist Master bzw. Slave
Zur Kontaktfläche müssen alle Elementkanten bzw. -flächen gehören, die in Kontakt treten können. Die Spezifikation kann • explizit oder• automatisch
erfolgen.

267 von 324 Universität Karlsruhe (TH)Rechenzentrum
Explizite Definition von Kontaktflächen
*SURFACE,NAME=Flächenname1,S41,S12,S13,S13,S2
1 2 3S4
S1 S1 S1
S2
Elementkante oder -fläche
Element-Nummer oder Element-Set

268 von 324 Universität Karlsruhe (TH)Rechenzentrum
• die Orientierung der Elemente sollte so sein, daß die Element-Normalen in Richtung des Kontaktes zeigen- bei Slave-Oberflächen wird dies empfohlen- bei Master-Oberflächen ist das obligatorisch
• 3D-Balken und -Stäbe können keine Master-Oberfläche bilden, da die Normale nicht eindeutig ist

269 von 324 Universität Karlsruhe (TH)Rechenzentrum
Automatische Definition von Kontaktflächen
• bei Kontinuumselementen• ABAQUS setzt automatisch die freien Kanten (Flächen) des Elementes bzw.
Element-Sets zur Kontaktflächen zusammen
*SURFACE,NAME=Flächenname8,9,10,11,12,
1 2 3 4
5 6 7 8
9 10 11 12

270 von 324 Universität Karlsruhe (TH)Rechenzentrum
Elemente, die eine Kontaktfläche bilden, müssen• dieselbe Dimension haben (2D oder 3D)• dieselbe Ordnung haben (1. oder 2. Ordnung)• entweder deformierbar oder starr sein (keine Mischungen)• entweder eben oder axisymmetrisch sein (keine Mischungen)• Master-Flächen müssen stetig sein, d.h. zwei beliebige Punkte der Fläche müssen
sich durch einen Pfad verbinden lassen, der die Fläche nicht verlässt.
gültigeFlächen
ungültigeFlächen
nur1 Punkt
Lücke

271 von 324 Universität Karlsruhe (TH)Rechenzentrum
Inkonsistente Normalen führen zu unstetigen Flächen
Beispiel:*ELEMENT,TYPE=B21,ELSET=BOTTOM10,1,211,2,312,3,6*ELEMENT,TYPE=B21,ELSET=TOP20,4,521,5,6*ELSET,ELSET=BEAMSBOTTOM,TOP*SURFACE,NAME=SURFBEAMS,SPOS
12
3 65
4

272 von 324 Universität Karlsruhe (TH)Rechenzentrum
Statt dessen:*SURFACE,NAME=SURFBOTTOM,SPOSTOP,NPOS
Die Parameter SPOS bzw. NPOS geben an, ob der Kontakt aus der Richtung der positiven bzw. negativen Normalenrichtung kommt.
Dasselbe trifft zu bei Verwendung von Schalen und Membranen, da auch hier eine Elementnormale definiert ist.
12
3 65
4

273 von 324 Universität Karlsruhe (TH)Rechenzentrum
Starre Kontaktflächen
Kontakt zwischen deformierbaren und starren Körpern wird dann modelliert• wenn einer der Kontaktpartner sehr steif ist• die Spannungsverteilung in einem der Kontaktpartner nicht von Interesse ist
Der starre Körper wird durch nur max. 6 Freiheitsgrade repräsentiert.
Modellierung der starren Oberfläche• analytisch• durch starre Elemente (Rigid Elements)• durch User Subroutinen
Die starre Oberfläche muß immer Master sein.
Bei der analytische Methode sind nur relativ einfache Geometrien möglich.

274 von 324 Universität Karlsruhe (TH)Rechenzentrum
Analytische starre Oberflächen
• Definition von Koordinaten auf der Kontaktfläche• Referenzknoten
2D-Kontaktflächen, XY-Ebene• Definition von Liniensegmenten• Startkoordinate• Endpunkte von Linien• Endpunkte und Mittelpunkt von Kreissegmenten• Endpunkte und Mittelpunkt von Parabelsegmenten• Angabe eines Fillet-Radius um evt. Ecken abzurunden
Durch die Reihenfolge der Segmentdefinitionen ist eine Richtung vorgegeben. Das Vektorprodukt dieser Richtung mit der z-Koordinate legt für jedes Segment eine Normalenrichtung fest.

275 von 324 Universität Karlsruhe (TH)Rechenzentrum
*RIGID SURFACE,NAME=RSURF,TYPE=SEGMENTS,REF NODE=1001START,X0,Y0LINE,X1,Y1CIRCL,X2,Y2,X3,Y3
x
y
(x0,y0)
(x1,y1)
(x2,y2)
(x3,y3)
*1001
n
n
s
s
n = z x s

276 von 324 Universität Karlsruhe (TH)Rechenzentrum
3D Kontaktflächen• Definition eines lokalen Koordinatensystems, kartesisch oder zylindrisch• Definition von Liniensegmenten im lokalen System• Projektion des Segmentes in die lokale z-Richtung, unendlich ausgedehnt
(TYPE=CYLINDER) oder Rotation des Segmentes um die lokale z-Achse *RIGID SURFACE,TYPE=CYLINDER,NAME=CYLSURF,REF NODE=1001XA,YA,ZA,XB,YB,ZBXC,YC,ZCSTART, ....
a
c
b
*1001
s
z
n
n = z x s

277 von 324 Universität Karlsruhe (TH)Rechenzentrum
*RIGID SURFACE,TYPE=REVOLUTION,NAME=SURF,REF NODE=1000XA,YA,ZA,XB,YB,ZBSTART, ....
a
b
r
z
n

278 von 324 Universität Karlsruhe (TH)Rechenzentrum
Rigid Elements
• allgemeinere Geometrien, als mit analytischen starren Oberflächen• in 2D: R2D2
RAX2
• in 3D R3D3R3D4
• Normalenvektoren sind definiert• Glättung der Kanten mit Bezierkurven bzw. -flächen• evt. mit expliziter Normalendefinition die Glättung steuern
12
1
2
3
1 2
34
279 von 324 Universität Karlsruhe (TH)Rechenzentrum
*ELEMENT,TYPE=R3D4,ELSET=ERIGID......*RIGID BODY,ELSET=ERIGID,REF NODE=9999*SURFACE,NAME=SRIGIDERIGID,SPOS......

280 von 324 Universität Karlsruhe (TH)Rechenzentrum
Kontaktbeschreibung
• über *CONTACT PAIR die Kontaktpartner paarweise zuordnen; als erste Fläche muß die Slave-Oberfläche stehen, als zweites die Master-Oberfläche
• Kontaktoberflächen können in mehreren solchen Zuordnungen stehen.• über *SURFACE INTERACTION die Kontaktwechselwirkung beschreiben; dies
geht über Suboptionen, z.B. *FRICTION*SURFACE,NAME=ASURF...<Definition der Fläche ASURF (Slave)>...*SURFACE,NAME=BSURF...<Definition der Fläche BSURF (Master)>...*CONTACT PAIR,INTERACTION=INTER, ...ASURF,BSURF*SURFACE INTERACTION=INTER*FRICTION...<Reibungskoeffizienten>

281 von 324 Universität Karlsruhe (TH)Rechenzentrum
CONTACT PAIR
*CONTACT PAIR,INTERACTION=Interaction-Name[,SMALL SLIDING][,SLIDE DISTANCE=r][,SMOOTH=s][,ADJUST=a][,TIED]
Datenzeilen:Slave1,Master1Slave2,Master2....
INTERACTION bezieht sich auf den Namen einer *SURFACE INTERACTION Definition
SMALL SLIDING wird dieser Parameter gesetzt, handelt es sich um einenSmall Sliding Kontakt, ansonsten um einen Finite SlidingKontakt
SLIDE DISTANCE gibt den Radius an, bis zu dem die Gleitwege bei FiniteSliding beschränkt sind
SMOOTH gibt die Glättung für Master Oberflächen vor
ADJUST Anpassen von Kontaktflächen im AnfangszustandTIED hefted die Kontaktflächen permanent aneinander

282 von 324 Universität Karlsruhe (TH)Rechenzentrum
Finite Sliding
• beliebig große Verschiebung der Kontaktflächen gegeneinander• beliebige Deformation und Rotation der Kontaktflächen• wenn *STEP,NLGEOM gesetzt ist, ist Finite Sliding Default• es entstehen unsymmetrische Terme in der Systemmatrix, bei stark gekrümmter
Master Oberfläche sollte *STEP,UNSYMM=YES gesetzt werden
Die Master Oberfläche muß glatt sein, damit die Normale überall eindeutig definiert ist, ansonsten gibt es Konvergenzprobleme. Daher glättet ABAQUS Knickstellen der Master Oberfläche standardmäßig.
l1
l20.2*l10.2*l2
ParabelDefault: SMOOTH=0.2Keine Glättung: SMOOTH=0

283 von 324 Universität Karlsruhe (TH)Rechenzentrum
Bei zweidimensionalen Flächen wird der Bereich, der geglättet wird vom Rand aus festgelegt:
l1
l2
f*l2
f*l1
SMOOTH=f

284 von 324 Universität Karlsruhe (TH)Rechenzentrum
Maximale Gleitstrecke
• große Master Oberflächen bedeuten bei Finite Sliding große Wavefronten• wenn man voraussetzen kann, daß die Knoten der Slave Flächen sich nur
innerhalb von festen Bereichen auf dem Master bewegen, kann man diesen als Radius angeben und dementsprechend die Wavefront verringern:SLIDE DISTANCE=r
• falls während der Berechnung ein Knoten diesen Bereich verläßt, wird eine Warnung ausgegeben
Slave
Masterr

285 von 324 Universität Karlsruhe (TH)Rechenzentrum
Surface Trimming
Was heißt Trimming?
linke Fläche: die Seiten A und B gehören nicht zur Oberflächen, da sie sowohleinen Eckknoten als auch einen Endknoten enthalten, dieOberfläche ist getrimmt.
rechte Fläche:die Kontaktfläche wird um die Ecken herumgezogen, da jetztkeine Elementseite aus Eck- und Endknoten besteht.
A B A B
Die gefüllten Elemente werden zur Definition einer Kontaktfläche benutzt.

286 von 324 Universität Karlsruhe (TH)Rechenzentrum
Surface Trimming bei Finite Sliding:
• bei getrimmter Master Oberfläche können die Slave-Knoten hinter die Master Oberfläche wandern
• daher sollte die Master Oberfläche nicht getrimmt sein bzw. um Ecken herum erweitert sein
• Ausnahme:Bei axialsymmetrischen Problemen muß die Symmetrieachse getrimmt sein, da sonst ein Slave-Knoten sich entlang der Achse bewegen kann. Dies wird dadurch erreicht, daß bei der Definition der Master-Fläche*SURFACE,NAME=Master,TRIM=YESgesetzt wird.
Master
Slave

287 von 324 Universität Karlsruhe (TH)Rechenzentrum
• Kontaktspannungen werden auf der Kontaktfläche berechnet, daher sollte auch nur die Fläche, die in Kontakt treten kann, als Kontaktfläche definiert sein.
• Slave Oberflächen sollten getrimmt sein, da sonst die Kontaktspannungen an den Rändern falsch berechnet werden.
• Standardvorbesetzung in ABAQUS:- alle Flächen werden getrimmt- außer bei Finite Sliding; dann wird die Masterfläche nicht getrimmt
Master
Slave

288 von 324 Universität Karlsruhe (TH)Rechenzentrum
ADJUST
• Slave-Knoten, die im Anfangszustand auf der Master-Fläche liegen sollen, haben i.d.R. numerisch dennoch einen Abstand bzw. liegen im Master-Bereich
• dadurch muß der gewünschte Anfangszustand herbei iteriert werden• einfacher ist es, den ADJUST-Parameter zu verwenden, denn dann werden die
Slave-Knoten auf die Master-Fläche verschoben• die Verschiebung erzeugt keine Dehnungen
2 Formen*CONTACT PAIR,ADJUST=a ...
Alle Slave-Knoten, deren Abstand zur Master-Fläche kleiner als a ist, sowohl von außen, als auch von innen, werden verschoben
*CONTACT PAIR,ADJUST=node-set, ...
Die Knoten im Nodeset node-set werden auf die Master-Fläche geschoben.

289 von 324 Universität Karlsruhe (TH)Rechenzentrum
TIED
• Gibt man zusätzlich die TIED-Option an, bleiben alle Slave-Knoten, die anfangs in Kontakt mit der Master-Fläche sind permanent in Kontakt, d.h. in der weiteren Analyse können diese Knoten die Master-Fläche- weder verlassen- noch durchdringen- noch parallel dazu gleiten
• Gilt nur für Translationsfreiheitsgrade, Rotationsfreiheitsgrade bleiben frei• Slave-Knoten, die anfänglich nicht in Kontakt sind, bleiben den Rest der Analyse
frei und können ggf. die Master-Fläche durchdringen bzw. verlassen• Bereiche mit inkompatiblen Netzen können einfach gekoppelt werden
*CONTACT PAIR,ADJUST=a,TIED, ...

290 von 324 Universität Karlsruhe (TH)Rechenzentrum
Small Sliding
• die Kontaktbedingung wird durch die Normale auf der Kontaktebene gegenüber den Knoten auf dem Slave festgelegt.
• der Kontaktverlauf ist so, daß sich der Ankerpunkt x0 nur wenig bewegt• die Slave-Knoten wechselwirken nur mit wenigen Master-Knoten• die Kontaktbedingung wird nur einmal und zwar zu Beginn festgelegt und bleibt
dann unverändert während der Analyse• Knoten der Slave-Fläche können die Kontaktebene nicht überschreiten• Syntax:*CONTACT PAIR,SMALL SLIDING, ...
Slave
Masterx0Kontakt-ebene

291 von 324 Universität Karlsruhe (TH)Rechenzentrum
Normale, Kontaktebene, Ankerpunkt
• in jedem Knoten der Master-Fläche ist eine Normale definiert,- entweder explizit durch die *NORMAL Option- oder als Mittelwert der Normalen von angrenzenden Elemente
• zwischen den Knotennormalen wird der Normalenvektor N(x0) isoparametrisch interpoliert
• Der Fußpunkt x0 wird so gewählt, daß die Normale auf den Kontaktknoten des Slave zeigt. Dieser Fußpunkt heißt Ankerpunkt.
• Kontaktebene ist die Ebene durch den Ankerpunkt, auf dem die Normale senkrecht steht.
N1 N2
N(x0)

292 von 324 Universität Karlsruhe (TH)Rechenzentrum
• die Normale in den Masterknoten wird aus den Segmenten ermittelt, die Teil der *SURFACE sind
• bei Small Sliding wird die Master-Fläche standardmäßig getrimmt um korrekte Normalen zu berechnen
• u.U. gibt es aber Slave-Knoten, die keinen Ankerpunkt auf dem Master haben und daher die Masterfläche durchdringen können, wenn getrimmt wird.Abhilfe:*SURFACE,TRIM=NO, ...
• bei symmetrischen Problemen legt ABAQUS die Normale in die Symmetrieebene

293 von 324 Universität Karlsruhe (TH)Rechenzentrum
• Problem: der Ankerpunkt bleibt auch während der Analyse immer an seinemisoparametrischen Punkt
Bei starker Deformation kann sich daher der Ankerpunkt sehr weit von seinem zugeordneten Slave-Knoten entfernen. Ebenso ändert sich die Orientierung der Kontaktebenen nicht, die ebenso bei starker Deformation nicht mehr die Master-Fläche einhüllen. Es kann daher zu Durchdringungen kommen.
• Abhilfe: man setze *STEP,NLGEOMMaster-Fläche so vernetzen, daß die Kontaktebenen die Flächengut approximieren

294 von 324 Universität Karlsruhe (TH)Rechenzentrum
Kraftübertragung
Bei Kontakt werden Kräfte übertragen übertragen. Es gibt 2 Möglichkeiten:1. Der Ankerpunkt liegt genau auf einem Master-Knoten:
dann übernimmt der Master-Knoten genau die Kraft vom Slave-Knoten2. Der Ankerpunkt liegt zwischen zwei Masterknoten bzw. der Slave-Knoten
gleitet entlang der Kontaktebene, dann wird die Kraft auf drei Knoten aufgeteilt im Verhältnis ihres Abstandes vom Drehpunkt (Drehmoment).
3. Die Anpassung der Kräfte an die Verschiebungen wird nur vorgenommen, wenn NLGEOM gesetzt ist.

295 von 324 Universität Karlsruhe (TH)Rechenzentrum
Selbstkontakt
Selbstkontakt entsteht, wenn eine Kontaktfläche sich faltet und mit sich selbst in Kontakt kommt.• Syntax:
CONTACT PAIR, ...surface,
oderCONTACT PAIR, ...surface,surface
• entspricht einer symmetrischen Master-Slave Formulierung• Ergebnisinterpretation ist kompliziert, da die Fläche sowohl Master, als auch Slave
ist und somit die Fläche Kräfte auf sich selbst überträgt.

296 von 324 Universität Karlsruhe (TH)Rechenzentrum
Surface-to-Surface Kontakt
• das Master-Slave Prinzip ist unsymmetrisch• damit bei stark gekrümmten Masterflächen keine Durchdringungen vorkommen,
muss die Slave-Fläche dichter vernetzt sein als der Master• der Kontaktmechanismus basiert auf der Bewegung der Slave-Knoten in Richtung
der Master-Fläche; Node-to-Surface Kontakt• der Surface-to-Surface Kontakt berücksichtigt auch die Umgebung der Slave-
Knoten und sorgt dafür, dass in dieser Umgebung keine Durchdringungen vorkommen
• Nachteil: erheblich höherer Rechenaufwand, deshalb nur bei extremer Masterfläche
• Aktivierung: *CONTACT PAIR,TYPE=SURFACE TO SURFACE, ...• sowohl bei Small Sliding als auch bei Finite Sliding

297 von 324 Universität Karlsruhe (TH)Rechenzentrum

298 von 324 Universität Karlsruhe (TH)Rechenzentrum
5. Beispiel: Hertz-Kontakt
Starrer Zylinder, Balken aus CPS4-Elementen
E-Modul: 3.106 N/cm2, Last: gleichförmiger Druck auf den Balken von 1000 N/cm.
* 1.5
6
0.050.45

299 von 324 Universität Karlsruhe (TH)Rechenzentrum
*HEADING 5.Beispiel: Kontakt, Balken - starrer Zylinder**** 2D-Balken***NODE1,-3.,-2.101,-3.,-1.9521,3.,-2.121,3.,-1.95*NGEN,NSET=ALL1,21101,121*NSET,NSET=MITTE11*NSET,NSET=LINKS1,101*NSET,NSET=RECHTS21,121***ELEMENT,TYPE=CPS4R1, 1,2,102,101*ELGEN,ELSET=BALKEN1,20

300 von 324 Universität Karlsruhe (TH)Rechenzentrum
*SOLID SECTION,ELSET=BALKEN,MATERIAL=MAT1*MATERIAL,NAME=MAT1*ELASTIC30.E6,.3**** Starrer Zylinder***NODE2000,0,0*NODE,SYSTEM=C1000,1.5,0,01023,1.5,345,0*NGEN,NSET=CYLINDER,LINE=C1000,1023,1,2000,,,,0,0,1***ELEMENT, TYPE=R2D2 , ELSET=RBODY 1000, 1000, 1001 1023, 1023, 1000*ELGEN,ELSET=RBODY1000,23,1,1*RIGID BODY,ELSET=RBODY,REFNODE=2000**** Kontaktflaechen***SURFACE,NAME=DSURFBALKEN,S3

301 von 324 Universität Karlsruhe (TH)Rechenzentrum
*SURFACE,NAME=RSURFRBODY,SNEG*CONTACT PAIR,INTERACTION=INT1DSURF,RSURF*SURFACE INTERACTION,NAME=INT1**** Randbedingungen ***BOUNDARY2000,1,22000,6LINKS,1RECHTS,1MITTE,1**** 1. Step: Verschiebung des Balkens bis zum Kontakt***STEP,NLGEOM,INC=1000*STATIC.05,1.*PRINT,CONTACT=YES*BOUNDARYLINKS,2,,0.46RECHTS,2,,0.46*EL PRINT,ELSET=BALKEN S,E

302 von 324 Universität Karlsruhe (TH)Rechenzentrum
*NODE PRINT,NSET=ALLU*CONTACT PRINT,MASTER=RSURF,SLAVE=DSURF*END STEP**** 2. Step: Aufbringen der Balkenlast***STEP,NLGEOM,INC=1000*STATIC.001,1.*BOUNDARY,OP=NEW2000,1,22000,6MITTE,1*DLOADBALKEN,P1,1000.*END STEP

303 von 324 Universität Karlsruhe (TH)Rechenzentrum
Inkrement=1, Time=0 Inkrement=15, Time=0.01
Inkrement=52, Time=1

304 von 324 Universität Karlsruhe (TH)Rechenzentrum
Anpassung von Kontaktflächen
Als Anfangszustand kann eine Überlappung oder ein Abstand der Kontaktflächen vorgegeben werden (z.B. v). Im ersten Step wird dann die Kontaktbedingungh(t) < 0 ersetzt durch h(t) - v(t) < 0
wobei v(t) eine linear abfallende Funktion ist:
Die Kontaktbedingung wird im Step gelöst, sodaß • bei anfänglichem Abstand (v < 0) Kontakt besteht• bei anfänglichem Überlapp (v > 0) ebenfalls Kontakt besteht, aber u.U. unter Druck
(Presspassung)
Es findet keine Verschiebung der Knoten statt.
V
t

305 von 324 Universität Karlsruhe (TH)Rechenzentrum
1. Möglichkeit:*CLEARANCE,MASTER=master,SLAVE=slave,{VALUE=V|TABULAR}
Datenzeile(n) (nur bei TABULAR):
N oder NSET,V
• geht nur bei Small Sliding• ist Teil der Modelldefinition
2. Möglichkeit:*CONTACT INTERFERENCE[,SHRINK]slave,master,V
• Der Abstand V muß angegeben werden, wenn der SHRINK-Parameter nicht gesetzt ist.
• Gilt auch für Finite Sliding.

306 von 324 Universität Karlsruhe (TH)Rechenzentrum
Entfernen und Einsetzen von Kontaktpaaren
Die Behandlung von Kontaktpaaren während einer Analyse ist u.U. sehr aufwendig• bei NLGEOM und Finite Sliding:
die Kontaktbedingung muß in jedem Inkrement neu bestimmt werden• bei NLGEOM und Small Sliding:
Normale, Ankerpunkte und Kontaktebene müssen in jedem Inkrement aktualisiert werden
• der Kontaktzustand (offen/geschlossen) muß für jeden in Frage kommenden Slave-Knoten berechnet werden
In Steps, in denen Kontakt keine Rolle spielt, können daher Kontaktpaare vorübergehend entfernt und später wieder hinzugefügt werden:*MODEL CHANGE,TYPE=CONTACT PAIR,{REMOVE|ADD}slave1,master1slave2,master2....
Die Wirkung von *MODEL CHANGE ist instantan, daher ist es möglich, plötzliche Entlastungen von Strukturen zu berechnen.

307 von 324 Universität Karlsruhe (TH)Rechenzentrum
Pre-Tension
• zur Beschreibung von Festhaltungen durch Bolzen, Nieten, Schrauben, Klammern etc.
• die Einspannung wird durch eine Querschnittsfläche (bei 3D Solid-Elementen) oder durch einen Punkt (bei Balken und Stäben) beschrieben, über die die Kraft eingeleitet wird, die Pre-Tension Section.
• Die Pre-Tension Section wird durch einen Pre-Tension Knoten kontrolliert, der nur einen Freiheitsgrad besitzt.
• Einleitung der Vorspannung als konzentrierte Kraft am Pre-Tension Knoten:*CLOAD1000,1,15000
• Erzeugung der Vorspannung als Längenänderung (Verkürzung) an der Pre-Tension Section über eine Randbedingung:*BOUNDARY1000,1,,0.01
Vorspannungskraft
Freiheitsgrad
Nummer der Pre-Tension Knotens

308 von 324 Universität Karlsruhe (TH)Rechenzentrum
• Die Vorspannung wird in einem eigenen Step aufgebracht. Weitere Lasten werden in Folgesteps eingeleitet. Die Vorspannung wird eingefroren durch:*BOUNDARY,FIXED1000,1
• Die Richtung der Vorspannung ist parallel zur Normalen der Pre-Tension Section, kann aber auch durch explizite Definition als Datenzeile bei der *PRE-TENSION Option vorgegeben werden. Die Normalenrichtung muß nicht mit der Flächennormalen übereinstimmen.
*1000
7
n
1
2
Pre-Tension Section,geht durch den 2. Knoten
*1000Pre-Tension Section
7 8

309 von 324 Universität Karlsruhe (TH)Rechenzentrum
Bei Balken oder Stäbe:*PRE-TENSION,ELEMENT=elnum,NODE=nodenum
Bei Solid Elementen:*PRE-TENSION,SURFACE=surfacename,NODE=nodenum
Ggf. folgen als Datenzeile für die Normalendefinition die 3 Komponenten des Normalenvektors.
Ausgabeinformationen: am Pre-Tension Knoten• CF1 über den Querschnitt geleitete Kraft• RF1 über den Querschnitt geleitete Reaktionskraft• U1 Längenänderung an der Pre-Tension Section
310 von 324 Universität Karlsruhe (TH)Rechenzentrum
Beispiel:
*HEADING...*ELSET,ELSET=CROSS7,8*SURFACE DEFINITION,NAME=QUERCROSS,S3*PRE-TENSION SECTION,SURFACE=QUER,NODE=1000...*STEP,NLGEOM*STATIC*CLOAD oder *BOUNDARY1000,1,12000 1000,1,,0.05*ENDSTEP*STEP*STATIC*BOUNDARY,FIXED1000,1...*ENDSTEP

311 von 324 Universität Karlsruhe (TH)Rechenzentrum
Kontinuumselemente unter verteilter Last
Falls in einem Kontaktproblem als Last ein gleichförmiger Druck auf eine Fläche wirkt, setzt sich dieser auf die Kontaktflächen fort.• bei linearen Elementen gibt es keine Probleme, da der Druck in konsistente
Knotenkräfte umgerechnet wird, die in allen Knoten gleich groß ist.• bei quadratischen Elementen sind die konsistenten Knotenkräfte
- sowohl ungleich- von unterschiedlicher Richtung
L
p
Gesamtkraft: F = p.LKonzentrierte Kräfte auf die Eckknoten: F/2
p.L/2 p.L/2
L
pp.L/6
2/3.p.L
Konzentrierte Kräfte auf Eckknoten: F/6Konzentrierte Kraft auf Mittenknoten: 2F/3

312 von 324 Universität Karlsruhe (TH)Rechenzentrum
• Dies führt zu ungleichförmiger Spannungsverteilung auf den Kontaktflächen und somit zu Konvergenzproblemen. Daher bei 2D Solids lineare Elemente wählen.
• Bei 3D Elementen und Schalen gibt es analoge Effekte. ABAQUS ändert daher bei den quadratischen Elementen, deren Flächen Slave-Flächen bilden den Elementtyp, in dem Flächenmittenknoten eingeführt werden.
Schalen: S8R5 --> S9R5Quader: C3D20 --> C3D27, C3D20R --> C3D27RPrismen: C3D15 --> C3D15V
• Bei 6-Knoten Dreiecke bzw. 10-Knoten Tetraeder wird ein konstanter Druck auf 3 konzentrierte Kräfte in den Kantenmittenknoten umgerechnet, d.h. die Eckknoten übertragen keine Kraft.Man wähle daher: CPS6M bzw. C3D10M

313 von 324 Universität Karlsruhe (TH)Rechenzentrum
Kontaktarten
Harter Kontakt:
Alternativen:*CONTACT PAIR,INTERACTION=name....*SURFACE INTERACTION,NAME=name*SURFACE BEHAVIOUR[,NO SEPARATION][,AUGMENTED LAGRANGE][,PRESSURE-OVERCLOSURE={HARD|EXPONENTIAL|LINEAR|TABULAR}]Datenzeile
NO SEPARATION nach Kontakt trennen sich die Flächen nicht mehr (z.B. bei adhäsiven Oberflächen)
AUGMENTED LAGRANGE Verfahren, das die Kontaktbedingung verstärkt undnumerisch stabiler ist, jedoch mehr Iterationen erfordert
Druck
Abstand

314 von 324 Universität Karlsruhe (TH)Rechenzentrum
Datenzeile:
PRESSURE-OVERCLOSURE=HARD
keine Daten
PRESSURE-OVERCLOSURE=LINEAR
k Steigung der linearen Funktion
PRESSURE-OVERCLOSURE=TABULAR
pi,hi Wertepaare für stückweise lineare Funktion, monoton steigend (p1=0)
PRESSURE-OVERCLOSURE=EXPONENTIAL
c,p,kmax harter Kontakt mit Toleranzen:
• Flächen haben erst Kontakt bei einem Überlapp von c,• Flächen in Kontakt trennen sich erst, wenn eine Dehnung p wirkt:
(adhäsive Flächen, verbesserte Konvergenz)
cp
kmax

315 von 324 Universität Karlsruhe (TH)Rechenzentrum
Reibung
• Scherkräfte entstehen bei rauhen Oberflächen• ab einem kritischen Wert gleiten die Flächen parallel gegeneinander• starker nichtlinearer Effekt• Reibung kann durch Lagrange-Multiplikator oder Penalty-Methode eingeführt
werden• isotrope Coulomb-Reibung und Penalty-Methode ist allgemein üblich;
Scherspannung
τ2 = τ12 + τ2
2
• kein Gleiten wenn τ < τkrit• τkrit = μ.p; p = Kontaktdruck
μ = Reibungskoeffizientτ
Δγ
τkrit
γkrit

316 von 324 Universität Karlsruhe (TH)Rechenzentrum
• ideale Coulomb-Reibung birgt numerische Probleme, daher läßt ABAQUS bis zu einem γkrit ein elastisches Gleiten zu. Dieser Wert wird von ABAQUS intern gewählt.
• Für τkrit kann ein Maximum angegeben werden, so daß
τkrit = max(τmax,μ.p)gilt.
Reibung wird als Unteroption von *SURFACE INTERACTION angegeben:*SURFACE INTERACTION,NAME=name*FRICTION[,TAUMAX=τmax]μ
• Falls μ>0.2 ist, wird der unsymmetrische Solver gewählt.• Der symmetrische Solver kann erzwungen werden, das Ergebnis ist korrekt,
Konvergenz langsamer.• Weitere Optionen zur Beschreibung von Reibung:
anisotrope Coulomb-Reibung, Lagrange-Formulierung, beliebig starke Reibung (unendliches μ)

317 von 324 Universität Karlsruhe (TH)Rechenzentrum
Ausgabeinformationen bei Kontakt
• Informationen über Kontaktmodellierung im .dat File
*PREPRINT,CONTACT={YES|NO}FINITE SLIDING RIGID 2D ELEMENT(S)GENERATED INTERNALLYSLAVE SURFACE : DSURFMASTER SURFACE : RSURFSURFACE INTERACTION : INT1REFERENCE NODE : 2000ELEMENT SLAVENUMBER NODE(S) 21 1219974 1019975 102....
• Informationen über die Kontaktiterationen im .msg File
*PRINT,CONTACT={NO|YES}
DETAILED OUTPUT OF CONTACT CHANGES DURING ITERATION REQUESTEDSLAVE SURFACE DSURF MASTER SURFACE RSURF NODE NUMBER 109 INITIALLY OPENED BY .54401SLAVE SURFACE DSURF MASTER SURFACE RSURF NODE NUMBER 110 INITIALLY OPENED BY .48531......
SLAVE SURFACE DSURF MASTER SURFACE RSURF NODE NUMBER 108 OVERCLOSED BY 3.11707E-02
......

318 von 324 Universität Karlsruhe (TH)Rechenzentrum
Weitere Informationen im .dat File:
S U R F A C E I N T E R A C T I O N S
NAME INT1THICKNESS/AREA 1.0000
C O N T A C T P A I R (S)
FILLET RADIUS CHARACTERISTIC EXTENSIONSLAVE MASTER INTERACTION HCRIT OR SMOOTH LENGTH RATIO NOTE
DSURF RSURF INT1 .15000 .20000 .30000 .10000 FINITE SLIDING
R I G I D B O D Y P R O P E R T I E S
PROPERTY NUMBER 4
RIGID BODY REFERENCE NODE = 2000
----------------------

319 von 324 Universität Karlsruhe (TH)Rechenzentrum
S U R F A C E D E F I N I T I O N S
SURFACE NAME DSURFDIMENSION 2DSURFACE TYPE NOT RIGIDNUMBER OF FACETS 20
ELEMENT FACE NODE(S) FORMING THE FACET
1 S3 101 102
2 S3 102 103
3 S3 103 104
20 S3 120 121
I N I T I A L C O N T A C T S T A T U S
SLAVE SURFACE: DSURFMASTER SURFACE: RSURF
NODE STATUS CLEARANCE NOTENUMBER
101 OPEN 2.082
102 OPEN 1.842
103 OPEN 1.60----------------------

320 von 324 Universität Karlsruhe (TH)Rechenzentrum
C O N T A C T P R I N T
THE FOLLOWING TABLE IS PRINTED AT EVERY 1 INCREMENT FOR SLAVE SURFACE DSURF AND MASTER SURFACE
RSURF
SUMMARIES WILL BE PRINTED WHERE APPLICABLE
TABLE 2 CPRESS CSHEAR1 COPEN CSLIP1

321 von 324 Universität Karlsruhe (TH)Rechenzentrum
• Anforderungen von Ergebnissen durch
*CONTACT PRINT*CONTACT FILE*CONTACT OUTPUT in Kombination mit *OUTPUT
• Ausgabevariable:
CPRESS KontaktdruckCOPEN Zustand der Kontaktflächen (offen oder in Kontakt)CSHEAR1/2 Scherspannung in 1- bzw. 2-RichtungCSLIP1/2 Akkumulierter Gleitweg in 1- bzw. 2-Richtung
u.v.m.

322 von 324 Universität Karlsruhe (TH)Rechenzentrum
• Ausgabeinformation kann auf spezielle Master/Slave Flächen eingeschränkt werden:*CONTACT{PRINT|FILE}[,SLAVE=slavename,MASTER=mastername][,NSET=nodeset][,FREQUENCY=I][,SUMMARY][,TOTAL]
Die beiden letzten Optionen sind nur bei PRINT zugelassen.
*CONTACT OUTPUT[,SLAVE=slavename,MASTER=mastername][, NSET=nodeset][,VARIABLE={ALL,PRESELECT}]

323 von 324 Universität Karlsruhe (TH)Rechenzentrum
Pro Inkrement
C O N T A C T O U T P U T
CONTACT OUTPUT FOR SLAVE SURFACE DSURF AND MASTER SURFACE RSURF
NODE STATUS CPRESS CSHEAR1 COPEN CSLIP1
101 OP .0000E+00 .0000E+00 .4011 2.463
102 OP .0000E+00 .0000E+00 .2334 2.065
103 OP .0000E+00 .0000E+00 9.0465E-02 1.661
104 OP .0000E+00 .0000E+00 2.4181E-02 1.297

324 von 324 Universität Karlsruhe (TH)Rechenzentrum
Im .sta File:SUMMARY OF JOB INFORMATION:STEP INC ATT SEVERE EQUIL TOTAL TOTAL STEP INC OF DOF IF DISCON ITERS ITERS TIME/ TIME/LPF TIME/LPF MONITOR RIKS ITERS FREQ
----------------------
2 8 1 0 3 3 1.01 0.00734 0.0004687
2 9 1 1 4 5 1.01 0.00805 0.0007031
2 10 1 2 3 5 1.01 0.00910 0.001055
2 11 1 1 7 8 1.01 0.0107 0.001582
2 12 1 1 6 7 1.01 0.0123 0.001582
----------------------
• Severe Discontinuity Iterations (SDI) sind Iterationen, bei denen sich der Status von Kontaktknoten ändert: OPEN oder CLOSE
• Default: 12 SDIs pro Inkrement• Änderung der Standardvorbesetzungen in *CONTROL


















