A wireless robot for networked laparoscopy
23
A Wireless Robot for Networked Laparoscopy By Archana Vikraman.R Roll no:11439013
-
Upload
athira1729 -
Category
Engineering
-
view
67 -
download
4
Transcript of A wireless robot for networked laparoscopy
A Wireless Robot for Networked Laparoscopy
By
Archana Vikraman.R
Roll no:11439013

Introduction• Laparoscopy is a minimally invasive surgical procedure.
• Commonly used for abdominal surgery, encumbered by cabling for power,video,and light sources.
• Have good image quality, interface with surgical instruments, required an assistant for control the scope.
• MARVEL- Miniature Anchored Robotic Videoscope For Expedited Laparoscopy.
• CM eliminates surgical-tool bottleneck experienced by surgeons in LESS procedure.
• MISS and LESS procedure reduce damage to biological tissues.

MARVEL concepts
• System overview.
comprised of Master Control Module(MCM),Human Machine
Interface(HMI),MARVEL Camera Module(CMs).
MARVEL used in LESS procedures, surgeon 1st inserts each CMs
into the end of insertion or removal tool.
A coaxial needle used to CM during insertion and removal.
Surgeon controls CM by a wireless joystick as HMI.

Fig (1) Functional diagram of the MARVEL system , including the MCM and the MARVEL robotic Camera module.

Fig (2) MARVEL system physical configuration, showing two networked CMs, a wireless joystick interface and the MCM.

Fig (3) Customized insertion removal tool used for attaching the MARVEL platform within the peritoneal cavity.

MARVEL provides its own imaging during attachment eliminating the need for a cabled laparoscope at any portion of the procedure.
MARVEL CM robotic platform composed 5 subsystems.
Illumination subsystemImaging subsystemWireless communication subsystemEmbedded controlled subsystemAttachment needle power subsystem
Motor control commands implemented by four PWM sls @ 24khz interfaced with H-bridge dual motor driver.Pan motor speed 0.48 to 31 r/min ,tilt motor speed 0.24 to 17r/min.

Fig (4) MARVEL CAD model .

Fig (5) MARVEL system interconnection, a total of 18 internal signals are going through the whole stack of PCBs

Fig(6) MARVEL research platform
Fig(7) MARVEL vision system exploded view.

Fig(8) (a) LCL (b) Assembled LED system.
(c) CAD drawing of the HFSS human body model used to derive the in vivo channel model. Left: Side view of a torso and a cross-sectional top view.
•Wireless adjustable focus
Fig 8 consists of,
Customized sunex lens holder
sunex lens with a focal length of 4.37(focal range b/w 60-100mm)
Lens vector LCL
Omni Vision OV7949 video image sensor
Combination of lens vector LCL & fixed lens extended the focal range of CM by 20cm.

In vivo and free space wireless attenuation as a function of frequency

•CIR of signals traveling in different directions through the human body.

Fig. 9. (a) Geometry of the LED light distribution experimental model in TracePro, showing the LED and cone reflector. The upper large disk is the geometrical area through which the TracePro program calculates the ray tracing.(b) LED light pattern simulation (f = 0.4 mm parabolic reflector; relativeIntensity), measured at distances of 5 cm from the LED sources.(c) CAD drawing of two reflector geometries used by the simulation.(d) LED ring with individual reflectors showing predicted optical ray tracing.

Fig. 10. Top: TracePro LED light distribution at 5 cm from the target. Bottom:Measured LED light distribution using different light reflecting cones; distance was 5 cm.

Fig. 11. Top: CAD design and final prototype of the test bench.Bottom: Captured images using Sunex lens and the lens vector liquid crystal at 15 and 110 mm.

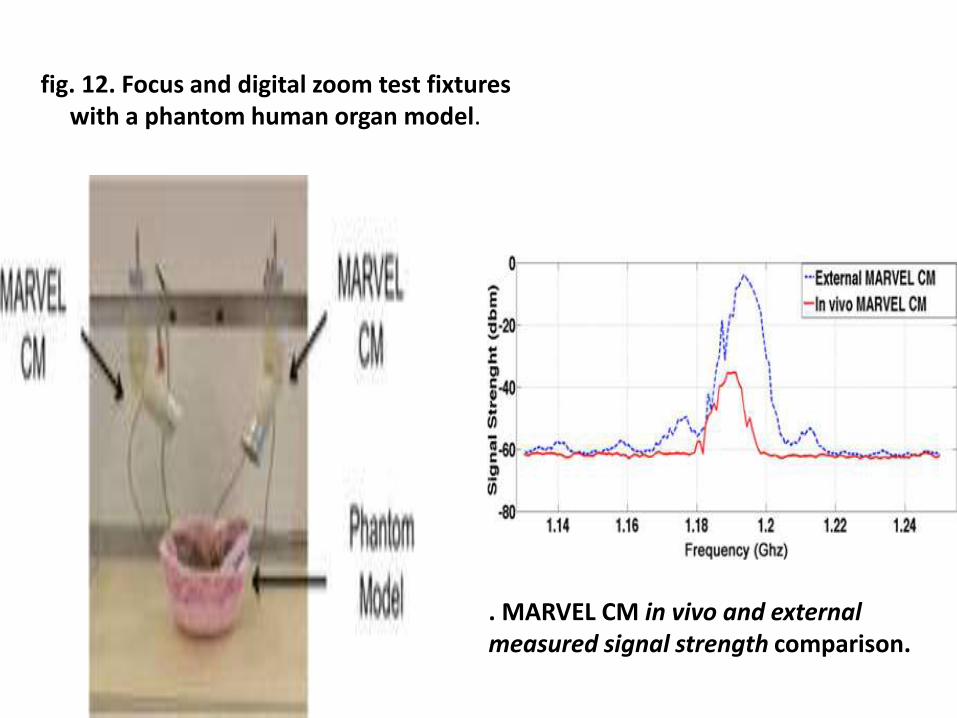
fig. 12. Focus and digital zoom test fixtures with a phantom human organ model.
. MARVEL CM in vivo and external measured signal strength comparison.

Advantages
• Reduced hemorrhaging, which reduces the chance of needing blood transfusion.
• Smaller incision, which reduces pain and shortens recovery time.
• Less pain
• Procedure times are usually slightly longer,sohospital stay is less
disadvantage
• Expensive
• Surgeon has limited range of motion at the surgical site .
• Poor depth perception

Future scope
• Future work on the
• MARVEL research platform will include the implementation
• of wireless high-definition video, an improved illumination
• system which will include blue and green lights at wavelengths
• of 345–445 nm and 530–550 nm, and the implementation
• of novel asymmetrical wireless digital communications to
• improve quality, yet lessen the computation complexity of the
• embedded devices, which will allow the implementation of
• wireless body networks with much higher bandwidth

ConclusionThe MARVEL system is intended to advance MIS inthe field of robotic videoscopes, and to be the first stepin developing semiautonomous wirelessly controlled andnetworked laparoscopic and other intelligent in vivo devices toenable a paradigm shift in MIS and related domains. Softwaresimulation and system characterization of the wireless channelpropagation in/out of the human body provided vital informationthat can be used to accelerate the design and prototypingof MARVEL devices and of next-generation self-containedwireless networked intrabody devices.