A Trigonometric Derivation for the Three-Dimensional Rotation … · 2017. 9. 10. · 3 Bell,...
4
COMPARING MAPPED FRACTURES AND AERIAL PHOTOGRAPHS 635 Hough, V. N. D. 1960. "Photogeologic Techniques Applied to the Mapping of Rock Joints," West Virginia Geological and Economic Survey Rept. of Inv. No. 19,21 p. Kelley, V. C. and Clinton, N. J. 1960. "Fracture Systems and Tectonic Elements of the Colorado Plateau," Univ. of N. Mex. Pub/., no. 6, 104 p. Lattman, L. H. 1958. "Technique of Mapping Geologic Fracture Traces and Lineamen ts on Aerial Photographs," PHOTOGRAMMETRIC EN- GINEERING, v. 24, n. 4, pp. 568-576, Lattman, L. H. and Matzke, R. H. 1961. "Geo- logical Significance of Fracture Traces, PHOTO- GRAMMETRIC ENGINEERING, v. 27, n. 3, pp. 435-438. Lattman, L. H. and Nickelsen, R. P. 1958. "Photo- A Trigonometric Derivation for the Three-Dimensional Rotation Matrix T HE formulas for a three-dimensional orthogonal rotation matrix have already been derived by two other methods: (1) algebraic substitution] in the formulas for the rotation of axes in plane analytic geometry; and (2) the multiplication' of the ordered series of matrices that represent the com- ponent plane rotations. Here a third deriva- tion is presented using spherical trigonometry. Figure 1 shows the ends of the "original" axes x*, y*, z* pierci ng the surface of a sphere whose center is the origin. The axes form an orthogonal set, being mutually perpendicular. Regarding the x*-axis as an axis of rotation, y* is rotated counter clockwise (positive) through an angle w to y*' while z* is moved the same angular amount to z*', maintaining the mutually perpendicular orientation among the points x*, y*', z*'. A second rotation about the y*'-axis as the axis of rotation through an angle 4> sends x* into x*' and z*' into z, retaining the relative orthogonal orientation. A third rotation about z as an axis through an angle K sends ] Harris, W. D., et aI., "Analytic Aerotriangula- tion," Technical Bulletin No. 21, U. S. Coast & Geodetic Survey, Washington 25, D. C., p. 30, 1962. 2 Ibid., p. 9. ---, also PHOTOGRAMMETRIC ENGINEERING, v. XXVIII, No.1, pp. 53-55, March, 1962. geologic Fracture-trace Mapping in Appa- lachian Plateau, Am. Assoc. Petroleum Geolo- gists Bull., v. 42, no. 9, pp. 2238-2245. McQueen, J. E. 1963. "Geology and Fracture Pat- terns of Southern Burnet County, Texas," M.A. Thesis, The niv. of Texas (Unpub- lished), 69 p. Mollard, J. D. 1957. "Aerial Photographs Aid Petroleum Search," Canadian Oil and Gas Ind., v. 10, no. 7, pp. 89-96. Ray, Richard G. 1960. "Aerial Photographs in Geologic Interpretation of Mapping," U. S. Geol. Survey Prof. Paper 373, 230 p. Twenhofel, W. S. and Sainsbury, C. L. 1958. "Fault Patterns in Southeastern Alaska," Geol. Soc. America Bull., v. 69, n. 11, pp. 1431-1442. of the Formulas G. C. TEWINKEL, U. S. Coast & Geodetic Survey, Washington, D. C. FIG. 1 x*' into x, and y*' into y, again preserving the orthogonali ty. It is desired to establish formulas for the nine direction cosines ag in terms of w, 4>, K in the array: [ :] = [::: ::: :::][::]. (1) z a3l a32 a33 z*
Transcript of A Trigonometric Derivation for the Three-Dimensional Rotation … · 2017. 9. 10. · 3 Bell,...

COMPARING MAPPED FRACTURES AND AERIAL PHOTOGRAPHS 635
Hough, V. N. D. 1960. "Photogeologic TechniquesApplied to the Mapping of Rock Joints," WestVirginia Geological and Economic Survey Rept.of Inv. No. 19,21 p.
Kelley, V. C. and Clinton, N. J. 1960. "FractureSystems and Tectonic Elements of the ColoradoPlateau," Univ. of N. Mex. Pub/., no. 6, 104 p.
Lattman, L. H. 1958. "Technique of MappingGeologic Fracture Traces and Lineamen ts onAerial Photographs," PHOTOGRAMMETRIC ENGINEERING, v. 24, n. 4, pp. 568-576,
Lattman, L. H. and Matzke, R. H. 1961. "Geological Significance of Fracture Traces, PHOTOGRAMMETRIC ENGINEERING, v. 27, n. 3, pp.435-438.
Lattman, L. H. and Nickelsen, R. P. 1958. "Photo-
A Trigonometric Derivationfor the Three-DimensionalRotation Matrix
T HE formulas for a three-dimensionalorthogonal rotation matrix have already
been derived by two other methods: (1)algebraic substitution] in the formulas for therotation of axes in plane analytic geometry;and (2) the multiplication' of the orderedseries of matrices that represent the component plane rotations. Here a third derivation is presented using spherical trigonometry.
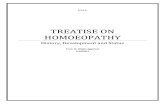
Figure 1 shows the ends of the "original"axes x*, y*, z* pierci ng the surface of a spherewhose center is the origin. The axes form anorthogonal set, being mutually perpendicular.Regarding the x*-axis as an axis of rotation,y* is rotated counter clockwise (positive)through an angle w to y*' while z* is movedthe same angular amount to z*', maintainingthe mutually perpendicular orientation amongthe points x*, y*', z*'.
A second rotation about the y*'-axis as theaxis of rotation through an angle 4> sends x*into x*' and z*' into z, retaining the relativeorthogonal orientation. A third rotationabout z as an axis through an angle K sends
] Harris, W. D., et aI., "Analytic Aerotriangulation," Technical Bulletin No. 21, U. S. Coast &Geodetic Survey, Washington 25, D. C., p. 30,1962.
2 Ibid., p. 9.---, also PHOTOGRAMMETRIC ENGINEERING,
v. XXVIII, No.1, pp. 53-55, March, 1962.
geologic Fracture-trace Mapping in Appalachian Plateau, Am. Assoc. Petroleum Geologists Bull., v. 42, no. 9, pp. 2238-2245.
McQueen, J. E. 1963. "Geology and Fracture Patterns of Southern Burnet County, Texas,"M.A. Thesis, The niv. of Texas (Unpublished), 69 p.
Mollard, J. D. 1957. "Aerial Photographs AidPetroleum Search," Canadian Oil and Gas Ind.,v. 10, no. 7, pp. 89-96.
Ray, Richard G. 1960. "Aerial Photographs inGeologic Interpretation of Mapping," U. S.Geol. Survey Prof. Paper 373, 230 p.
Twenhofel, W. S. and Sainsbury, C. L. 1958."Fault Patterns in Southeastern Alaska," Geol.Soc. America Bull., v. 69, n. 11, pp. 1431-1442.
of the Formulas
G. C. TEWINKEL,
U. S. Coast & Geodetic Survey,Washington, D. C.
FIG. 1
x*' into x, and y*' into y, again preserving theorthogonali ty.
I t is desired to establish formulas for thenine direction cosines ag in terms of w, 4>, K inthe array:
[:] = [::: ::: :::][::]. (1)
z a3l a32 a33 z*

636 PHOTOGRAMMETRIC ENGINEERI G
where c is the hypotenuse and b are the othertwo sides. Another standard formula fromspherical trigonometry that will be used is theLaw of Cosines for the sides of an oblique triangle:
cos a = cos b cos c + sin b sin c cos A
where A is the angle opposite the side a.Figure 3 shows the side x*z whose cosi ne is
a31. By virtue of the orthogonality relation,the arc x*zz*' is an equator with y*' as a pole,whence the angles at y*' are equal to the arcson x*zz*'. Also, x*z*' is 90°, zz*' is cP, whencex*z is (90° -cP), and
x*z is a line whose pole is at y*'. A line from apole to its equator is a meridian; a meridianintersects its equator at right angles. Anangle at a pole between two meridians is eq ualto the arc length on the equator intersectedby the meridians. In triangle x*y*'z, the angleat y*' is equal to the opposite side x*z.
One of the standard formulas for a sphericalright triangle will be used here:
cos c = cos a cos b
(3)cos x*z = a31 = cos (900- .p) = sin .p.
The following table may assist one in identifying the specific direction angles:
FIG. 2
x* y* z*
(2)
The term all is the cosine of the angle betweenthe x and x* axes, namely, the angle xOx*where 0 is the origin; a32 is the cosine of theangle between the z and y* axes, etc.3
Figure 2 illustrates these angles.A few of the principles of spherical trigonom
etry are mentioned here as background inasmuch as they are seldom contained in elementary textbooks.' The radius of the sphereis considered to be unity. A great circle arc isthe line of intersection of the surface of thesphere and a plane passing through the centerof the sphere. In this presentation all lines,such as those forming the sides of sphericaltriangles, are great circle arcs. A side of aspherical triangle is expressed as an angle atthe center of the sphere subtended by thevertices. An angle of a spherical triangle is thedihedral angle between the two great planesthat form the angle. A right spherical triangle has one angle equal to 90°, as shownin Figure 4.
Any line on a sphere is a portion of anequator which has two poles. The length of aline from pole to equator is 90°. In Figure 3,
3 Bell, Robert J. T., "An Elementary Treatiseon Coordinate Geometry of Three Dimensions,"Chapter IV, MacMillan & Co., Third Edition,1959.
• Eshbach, Ovid W., "Handbook of EngineeringFundamentals," p. 2-75, John Wiley & Sons, 1957.
In Figure 4, by construction and definitionz is a pole to the equator x*'xy*'y. Thereforethe angle at x*' is 90°, triangle xx*'x* is aright triangle, the hypotenuse is xx* whosecosine is desired, and the other two sides havethe lengths cP and K; then
cos xx* = all = cos.p cos K. (4)
Similarly, in Figure 5, y*' is a pole of arcz*'zx*x*', triangle zz*'z* is a right trianglewith legs cP and w, and hypotenuse zz*:
cos zz* = a33 = cos .p cos w. (5)
z"/'-
/ "/ ,/~ ' ....
/ "'b.I , ,
'\'\
'\
.p'
x·
FIG. 3

FORMULAS FOR THE THREE-DIMENSIONAL ROTATfO MATRIX 637
FIG. 4 FIG. 6
One side length is <I> and the other is (90° +K).Then the third side x*y is the hypotenuse and
cos x*y = a21 = cos </> cos (900 + K)
In triangle y*zz*' shown in Figure 8, theangle at z*' is a right angle by constructionand definition, the two legs have the lengths<I> and (90 0 +w), and the hypotenuse is therefore given by
cos y*z = a32 = cos </> cos (900+ w)
= - cos</>sinw. (8)
I n triangle yy*'z* of Figu re 9, the side yy*'has an arc length K, the side )I*'Z* is (90 0 -w).the angle at y*' is the complement (90° -<I»of the outer angle (90°+<1». Applying the law
The rotational elements wand K togetherwith yy* form an oblique spherical trianglewherein the angle yy*'y* is known, as follows(Figure 6). Consider the exterior trianglex*'y*'z*'. By construction, y*' is a pole of theequator z*'zx*x*'. The length of the equatorial arc is (90° +<1» by construction, and thisis also the polar angle x*'y*'z*' at y*'. Theangle yy*'y* of the small triangle is equal tothe opposite angle x*'y*'z*' or (90°+<1».Applying the La\\' of Cosines for sides to triangle yy*'y*,
cos yy* = 022 = cos W cos K + sin w sin K cos (900 + </»
= cosw cos K - sin w sin </> sin K. (6)
Consider triangle x*x*'y in Figure 7. Theangle at x*' is a right angle by construction.
= - cos</>sinK. (7)
z.,
rIII Z'
°33 ""
Z \/ \
I \I \
I \I \
I \I \I \I I
...., II 1y .,I ,I I\ I\\\\~....,
FIG. 5 FIG. 7

638 PHOTOGRAMMETRIC ENGINEERING
FIG. 8
of cosines,
cos yz* = a23 = cos K cos (900- w)
+ sin K sin (900- w) cos (900
- </»
= sinw CaSK + cOSW sinet> sinK. (9)
FIG. 9
A similar situation exists for the term aJ2 asshown in Figure 10. In the triangle xy*y*', thelength of side y*y*' is the angle w, that for theside xy*' is (90 0 -K), and the angle at y*' is(90 0 -et». From the Law of Cosines for sides,
cos xy* = al2 = cos w cos (900- K)
+ sin w sin (900- K) cos (90° - et»
= :cos W"siQK:+:sin w sin</> cos K. (10)
FIG. 10
Figure 11 illustrates the unknown side xz*of the triangle xy*'z*' The side xy*' is (90°-K), side y*'z* is (90 0 -w), and the angle aty*' is (90 0 +et». Applying again the Law ofCosi nes for the sides,
cos xz* = al3 = cos (900- w) cos (900
- K)
+ sin (900- w) sin (900
- K) cos (900 + et»
= sin w sin K - cos w sin et> cos K. (11)
z..~~ z·
//
/
/<1>I
zlI
I
'-,... all
":t,x'\
\\
\<1>\\
\ __ -"/ X
x"
FIG. 11
This completes the trigonometric derivation. The results are identical to those obtained by the other two methods.