
Local Features and Takagi-Sugeno Fuzzy Logic based Medical ...

A Sum-of-Squares Framework
for Fuzzy Systems Modeling and Control- Beyond Linear Matrix Inequalities -
Kazuo Tanaka,
IEEE Fellow, IFSA Fellow
Professor
Department of Mechanical and Intelligent Systems Engineering
The University of Electro-Communications (UEC) , Tokyo, Japan
https://sites.google.com/site/tanaka2lab/home
IEEE WCCI 2016 Tutorial (FUZZ-4), Vancouver, July 24, 2016
Google Scholar
https://scholar.google.com/citations?user=RxHaAJwAAAAJ&hl=en
ResearchGate
https://www.researchgate.net/profile/Kazuo_Tanaka3K. Tanaka, A Sum-of-Squares Framework for Fuzzy Systems Modeling and Control:Beyond Linear Matrix Inequalities, The University of Electro-Communications (UEC) , Tokyo, Japan
K. Tanaka, A Sum-of-Squares Framework for Fuzzy Systems Modeling and Control:Beyond Linear Matrix Inequalities, The University of Electro-Communications (UEC) , Tokyo, Japan
A Sum-of-Squares Framework
for Fuzzy Systems Modeling and Control- Beyond Linear Matrix Inequalities -
From a nonlinear control theory point of view
Recommended prior knowledge in this tutorial
- Modern control theory
- Lyapunov stability theory
K. Tanaka, A Sum-of-Squares Framework for Fuzzy Systems Modeling and Control:Beyond Linear Matrix Inequalities, The University of Electro-Communications (UEC) , Tokyo, Japan
K. Tanaka, A Sum-of-Squares Framework for Fuzzy Systems Modeling and Control:Beyond Linear Matrix Inequalities, The University of Electro-Communications (UEC) , Tokyo, Japan
IEEE WCCI 2016 Tutorial (FUZZ-4), Vancouver, July 24, 2016
The main research covered in this tutorial has been conducted in our laboratory at the
University of Electro-Communications (UEC), Tokyo, Japan, in collaboration with Prof. Hua
O. Wang and his laboratory at Boston University, Boston, USA. Throughout the tutorial, it will
be reflected upon how to bridge enabling fuzzy model-based control frameworks with system-
theoretical approaches in the development of toolkits for control of nonlinear systems.

Introductions
Part I Outline of Takagi-Sugeno (T-S) Fuzzy Model-based Control
Part II T-S Fuzzy Model-based Control using Linear Matrix
Inequalities (LMIs)
Part III Theoretical Advances in T-S Fuzzy Model-based Control
using LMIs
Part IV Beyond LMIs: Polynomial Fuzzy Systems Control and
Analysis using Sum-of- Squares (SOS)
Conclusions
Tutorial Overview
K. Tanaka, A Sum-of-Squares Framework for Fuzzy Systems Modeling and Control:Beyond Linear Matrix Inequalities, The University of Electro-Communications (UEC) , Tokyo, Japan
K. Tanaka, A Sum-of-Squares Framework for Fuzzy Systems Modeling and Control:Beyond Linear Matrix Inequalities, The University of Electro-Communications (UEC) , Tokyo, Japan
3

IntroductionsHistory of fuzzy control
Recent research direction in fuzzy control
Tutorial Overview
K. Tanaka, A Sum-of-Squares Framework for Fuzzy Systems Modeling and Control:Beyond Linear Matrix Inequalities, The University of Electro-Communications (UEC) , Tokyo, Japan
K. Tanaka, A Sum-of-Squares Framework for Fuzzy Systems Modeling and Control:Beyond Linear Matrix Inequalities, The University of Electro-Communications (UEC) , Tokyo, Japan
Matrices and Vectors in this tutorial
It is assumed in this tutorial that all the matrices
and vectors have appropriate dimensions.
( ) means that P is a positive-
definite matrix (positive semidefinite matrix).
0P 0P
4

History of Fuzzy Control
K. Tanaka, A Sum-of-Squares Framework for Fuzzy Systems Modeling and Control:Beyond Linear Matrix Inequalities, The University of Electro-Communications (UEC) , Tokyo, Japan
K. Tanaka, A Sum-of-Squares Framework for Fuzzy Systems Modeling and Control:Beyond Linear Matrix Inequalities, The University of Electro-Communications (UEC) , Tokyo, Japan
5
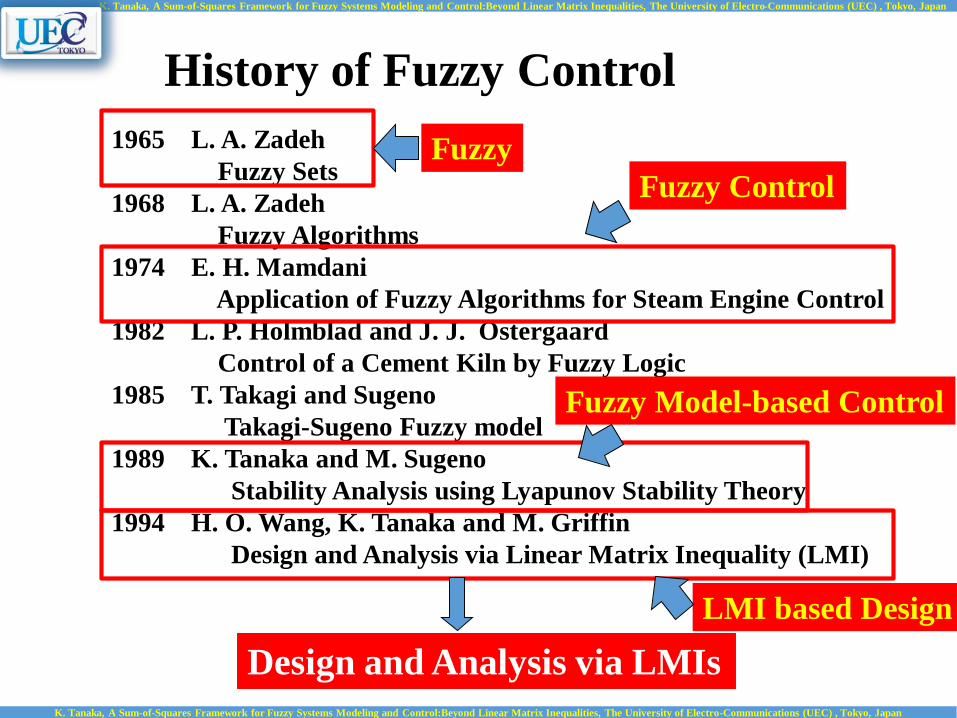
1965 L. A. Zadeh
Fuzzy Sets
1968 L. A. Zadeh
Fuzzy Algorithms
1974 E. H. Mamdani
Application of Fuzzy Algorithms for Steam Engine Control
1982 L. P. Holmblad and J. J. Ostergaard
Control of a Cement Kiln by Fuzzy Logic
1985 T. Takagi and Sugeno
Takagi-Sugeno Fuzzy model
1989 K. Tanaka and M. Sugeno
Stability Analysis using Lyapunov Stability Theory
1994 H. O. Wang, K. Tanaka and M. Griffin
Design and Analysis via Linear Matrix Inequality (LMI)
History of Fuzzy Control
Fuzzy
Fuzzy Control
Design and Analysis via LMIs
LMI based Design
K. Tanaka, A Sum-of-Squares Framework for Fuzzy Systems Modeling and Control:Beyond Linear Matrix Inequalities, The University of Electro-Communications (UEC) , Tokyo, Japan
K. Tanaka, A Sum-of-Squares Framework for Fuzzy Systems Modeling and Control:Beyond Linear Matrix Inequalities, The University of Electro-Communications (UEC) , Tokyo, Japan
Fuzzy Model-based Control

From Linear Matrix Inequality (LMI)
to Sum of Squares (SOS)
From Takagi-Sugeno Fuzzy Model
to Polynomial Fuzzy Model
From Simple Lyapunov Function
to Generalized Lyapunov Functions
Design and Analysis via LMIs
Design and Analysis via SOS
2009 K. Tanaka, H. Yoshida, H. Ohtake and H. O. Wang,
Design and Analysis via SOS
SOS based Design
K. Tanaka, A Sum-of-Squares Framework for Fuzzy Systems Modeling and Control:Beyond Linear Matrix Inequalities, The University of Electro-Communications (UEC) , Tokyo, Japan
K. Tanaka, A Sum-of-Squares Framework for Fuzzy Systems Modeling and Control:Beyond Linear Matrix Inequalities, The University of Electro-Communications (UEC) , Tokyo, Japan
Recent Research Direction
in Fuzzy Control
7
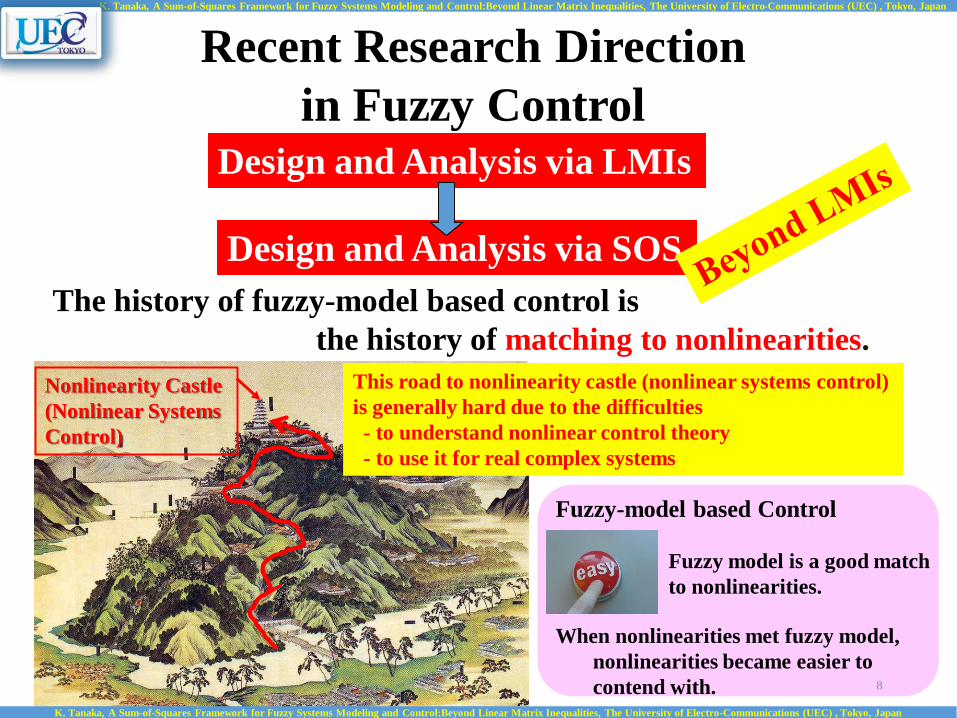
Design and Analysis via LMIs
The history of fuzzy-model based control is
the history of matching to nonlinearities.
Design and Analysis via SOS
Fuzzy model is a good match
to nonlinearities.
When nonlinearities met fuzzy model,
nonlinearities became easier to
contend with.K. Tanaka, A Sum-of-Squares Framework for Fuzzy Systems Modeling and Control:Beyond Linear Matrix Inequalities, The University of Electro-Communications (UEC) , Tokyo, Japan
K. Tanaka, A Sum-of-Squares Framework for Fuzzy Systems Modeling and Control:Beyond Linear Matrix Inequalities, The University of Electro-Communications (UEC) , Tokyo, Japan
Recent Research Direction
in Fuzzy Control
Nonlinearity Castle
(Nonlinear Systems
Control)
This road to nonlinearity castle (nonlinear systems control)
is generally hard due to the difficulties
- to understand nonlinear control theory
- to use it for real complex systems
Fuzzy-model based Control
8

Part I Outline of Takagi-Sugeno (T-S) Fuzzy Model-based Control
Why do we use T-S Fuzzy Model-based Control?
What is T-S Fuzzy Model-based Control?
How can we realize T-S Fuzzy Model-based Control?
Tutorial Overview
K. Tanaka, A Sum-of-Squares Framework for Fuzzy Systems Modeling and Control:Beyond Linear Matrix Inequalities, The University of Electro-Communications (UEC) , Tokyo, Japan
K. Tanaka, A Sum-of-Squares Framework for Fuzzy Systems Modeling and Control:Beyond Linear Matrix Inequalities, The University of Electro-Communications (UEC) , Tokyo, Japan
9

Why Do We Use?
T-S Fuzzy Model-based Control
Simple, Natural and Effective Nonlinear Control
K. Tanaka,
Recent Advances in Fuzzy Modeling and Control: When Nonlinearities Met Fuzzy Logic,
WCCI 2014 Invited Lecture, Beijing, July 8, 2014.
Other nonlinear control techniques require special
and rather involved knowledge, e.g.,R. Sepulcher, M. Jankovic, and P. Kokotovic,
Constructive Nonlinear Control, New York: Springer-Verlag, 1997.
Fuzzy logic is a good match to nonlinearities.
When nonlinearities met fuzzy logic,
nonlinearities became easier to contend with.
K. Tanaka, A Sum-of-Squares Framework for Fuzzy Systems Modeling and Control:Beyond Linear Matrix Inequalities, The University of Electro-Communications (UEC) , Tokyo, Japan
K. Tanaka, A Sum-of-Squares Framework for Fuzzy Systems Modeling and Control:Beyond Linear Matrix Inequalities, The University of Electro-Communications (UEC) , Tokyo, Japan
Nonlinearity Castle (Nonlinear Systems Control)
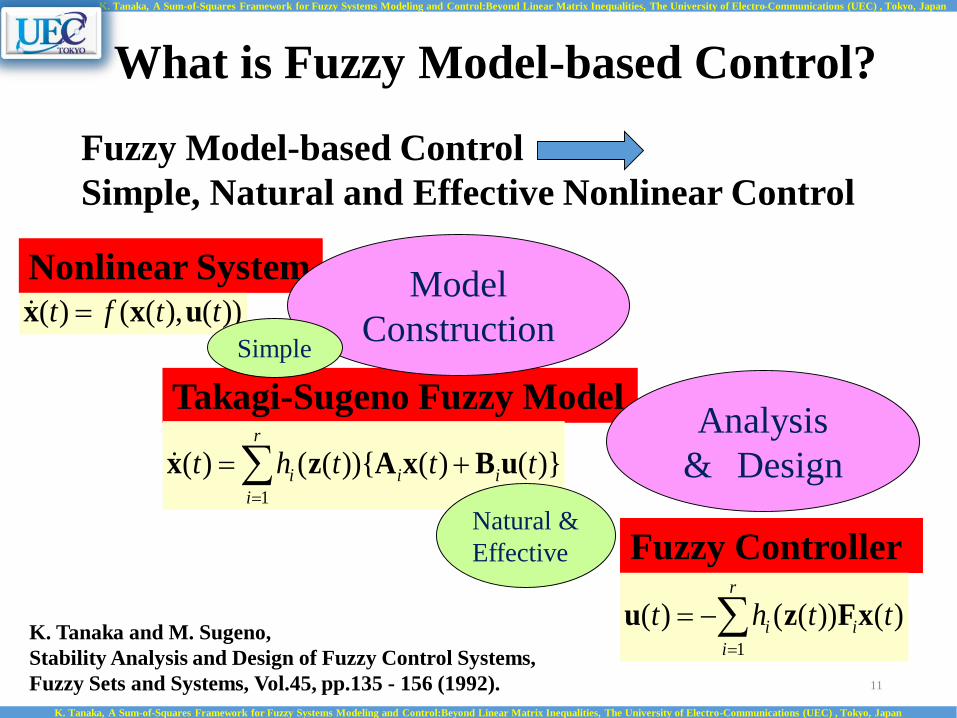
What is Fuzzy Model-based Control?
Fuzzy Controller
Nonlinear System
Takagi-Sugeno Fuzzy Model
)}()()){(()(1
tttht i
r
i
ii uBxAzx
))(),(()( ttft uxx
)())(()(1
tthtr
i
ii xFzu
Fuzzy Model-based Control
Simple, Natural and Effective Nonlinear Control
K. Tanaka and M. Sugeno,
Stability Analysis and Design of Fuzzy Control Systems,
Fuzzy Sets and Systems, Vol.45, pp.135 - 156 (1992).
Model
Construction
Analysis
& Design
K. Tanaka, A Sum-of-Squares Framework for Fuzzy Systems Modeling and Control:Beyond Linear Matrix Inequalities, The University of Electro-Communications (UEC) , Tokyo, Japan
K. Tanaka, A Sum-of-Squares Framework for Fuzzy Systems Modeling and Control:Beyond Linear Matrix Inequalities, The University of Electro-Communications (UEC) , Tokyo, Japan
Simple
Natural &
Effective
11
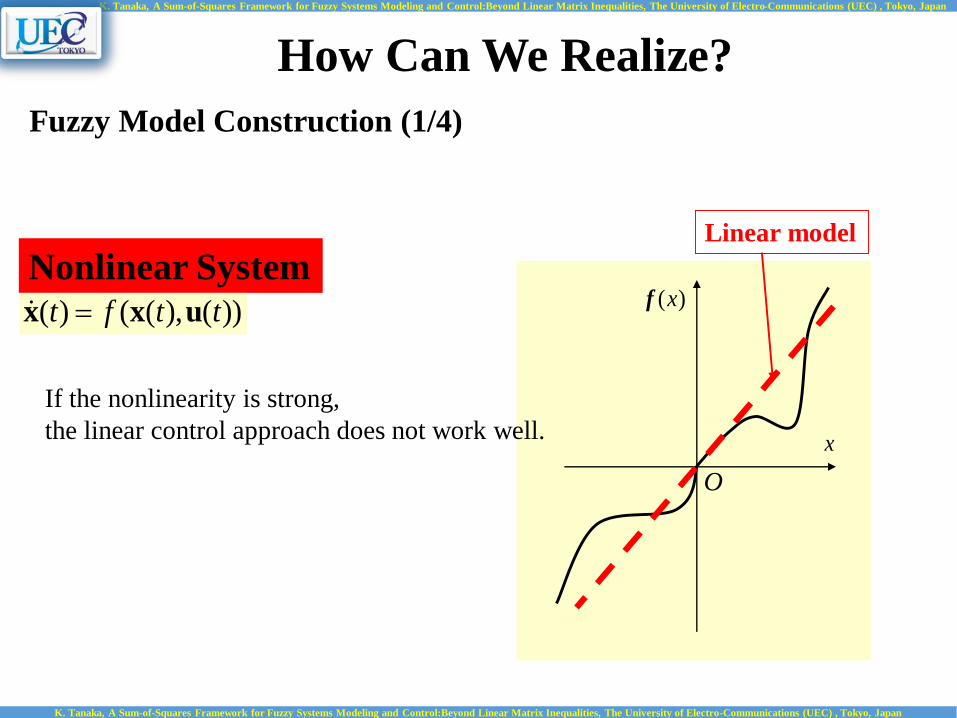
Nonlinear System
))(),(()( ttft uxx
O
)(xf
x
Fuzzy Model Construction (1/4)
How Can We Realize?
K. Tanaka, A Sum-of-Squares Framework for Fuzzy Systems Modeling and Control:Beyond Linear Matrix Inequalities, The University of Electro-Communications (UEC) , Tokyo, Japan
K. Tanaka, A Sum-of-Squares Framework for Fuzzy Systems Modeling and Control:Beyond Linear Matrix Inequalities, The University of Electro-Communications (UEC) , Tokyo, Japan
Linear model
If the nonlinearity is strong,
the linear control approach does not work well.

)(xfy
O
)(xf
x1
d2
d
3d
4d
• Constant terms
• Approximation
)dx(d
)dx(0
)0x(d
)dx(d
)(
4344
333
222
2111
bxa
bxa
bxa
bxa
xf
Local linearization
))()())((()(
4
1
ii
i
ii tttht DuBxAzx
}){(
4
1
i
i
ii bxaxhy
Static model
Dynamic model
Piecewise Linear Model
T. Takagi and M. Sugeno, “Fuzzy Identification
of Systems and Its Applications to Modeling and
Control”, IEEE Trans. on SMC 15, no. 1,
pp.116-132, 1985.
How Can We Realize?
Fuzzy Model Construction (2/4)
K. Tanaka, A Sum-of-Squares Framework for Fuzzy Systems Modeling and Control:Beyond Linear Matrix Inequalities, The University of Electro-Communications (UEC) , Tokyo, Japan
K. Tanaka, A Sum-of-Squares Framework for Fuzzy Systems Modeling and Control:Beyond Linear Matrix Inequalities, The University of Electro-Communications (UEC) , Tokyo, Japan
13

O
)(xf
x
m1
m2a1x
a2x
2
1
)()(i
ii xaxhxx f
2
2
1)(,0)(i
iixhxh
)()(
)()(
21
21
xmxm
xmxh
)()(
)()(
21
12
xmxm
xmxh
))()())((()(
2
1
tttht i
i
ii uBxAzx
xaxa 21 ,Sector
Fuzzy model
Dynamic model
K. Tanaka and H. O. Wang,
Fuzzy Control System Design and Analysis:
A Linear Matrix Inequality Approach,
John Wiley & Sons (2001).
How Can We Realize?
Fuzzy Model Construction (3/4)
Sector nonlinearity concept
K. Tanaka, A Sum-of-Squares Framework for Fuzzy Systems Modeling and Control:Beyond Linear Matrix Inequalities, The University of Electro-Communications (UEC) , Tokyo, Japan
K. Tanaka, A Sum-of-Squares Framework for Fuzzy Systems Modeling and Control:Beyond Linear Matrix Inequalities, The University of Electro-Communications (UEC) , Tokyo, Japan
14
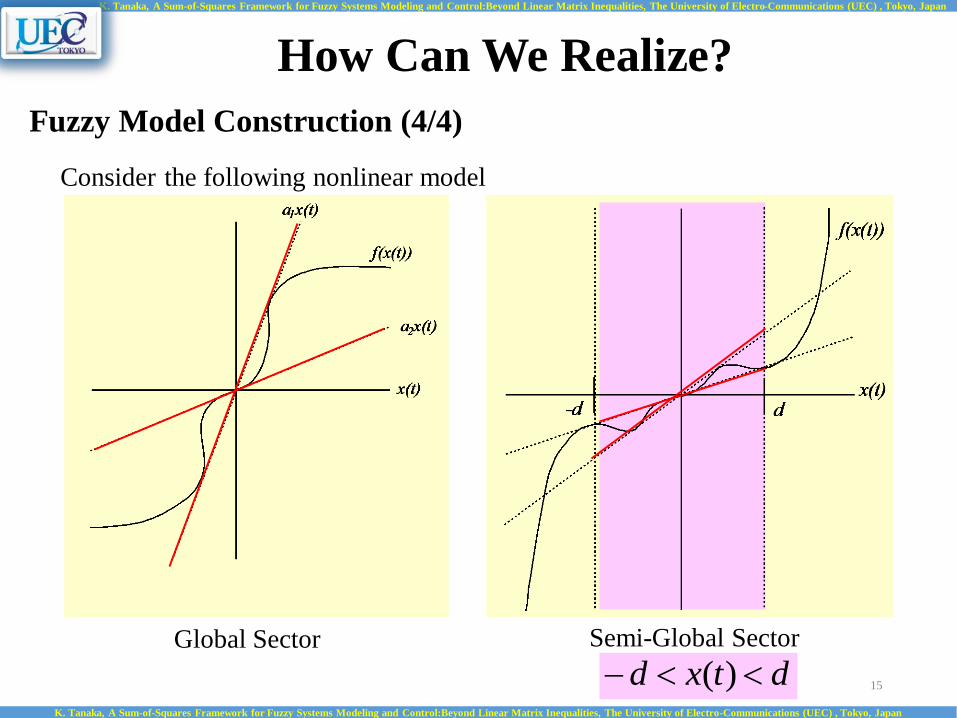
dtxd )(Global Sector Semi-Global Sector
Consider the following nonlinear model
How Can We Realize?
Fuzzy Model Construction (4/4)
K. Tanaka, A Sum-of-Squares Framework for Fuzzy Systems Modeling and Control:Beyond Linear Matrix Inequalities, The University of Electro-Communications (UEC) , Tokyo, Japan
K. Tanaka, A Sum-of-Squares Framework for Fuzzy Systems Modeling and Control:Beyond Linear Matrix Inequalities, The University of Electro-Communications (UEC) , Tokyo, Japan
15

How Can We Realize?
Fuzzy Model Construction Example
Canopy
(Parachute)
Direction
Control BarPropeller
Camera
・GPS
・Gyro sensor
・Acceleration sensor
・Magnetic sensor
Powered Paraglider
K. Tanaka, A Sum-of-Squares Framework for Fuzzy Systems Modeling and Control:Beyond Linear Matrix Inequalities, The University of Electro-Communications (UEC) , Tokyo, Japan
K. Tanaka, A Sum-of-Squares Framework for Fuzzy Systems Modeling and Control:Beyond Linear Matrix Inequalities, The University of Electro-Communications (UEC) , Tokyo, Japan
16
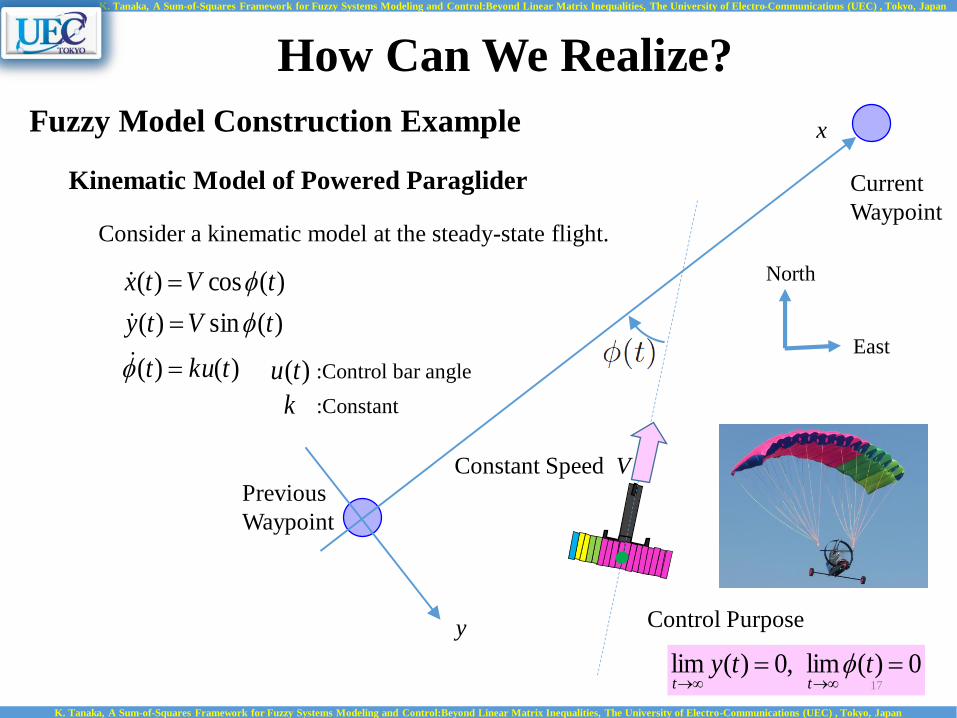
How Can We Realize?
Fuzzy Model Construction Example
North
East
Current
Waypoint
Previous
Waypoint
Consider a kinematic model at the steady-state flight.
Kinematic Model of Powered Paraglider
Constant Speed V
y
x
)()(
)(sin)(
)(cos)(
tkut
tVty
tVtx
Control Purpose
0)(lim,0)(lim
ttytt
)(tu :Control bar angle
K. Tanaka, A Sum-of-Squares Framework for Fuzzy Systems Modeling and Control:Beyond Linear Matrix Inequalities, The University of Electro-Communications (UEC) , Tokyo, Japan
K. Tanaka, A Sum-of-Squares Framework for Fuzzy Systems Modeling and Control:Beyond Linear Matrix Inequalities, The University of Electro-Communications (UEC) , Tokyo, Japan
k :Constant
17
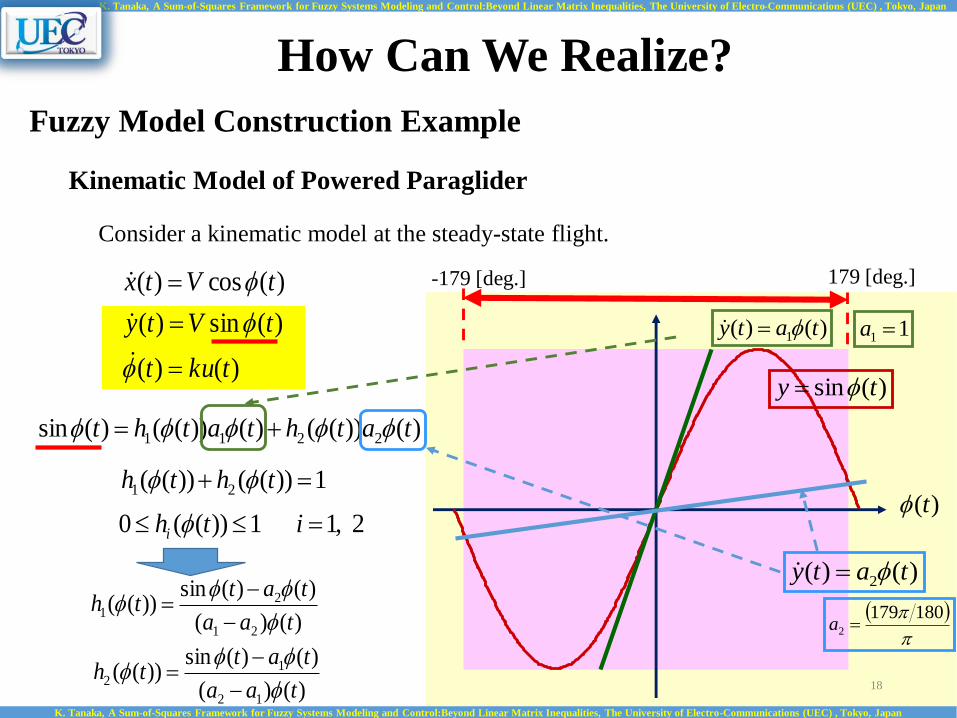
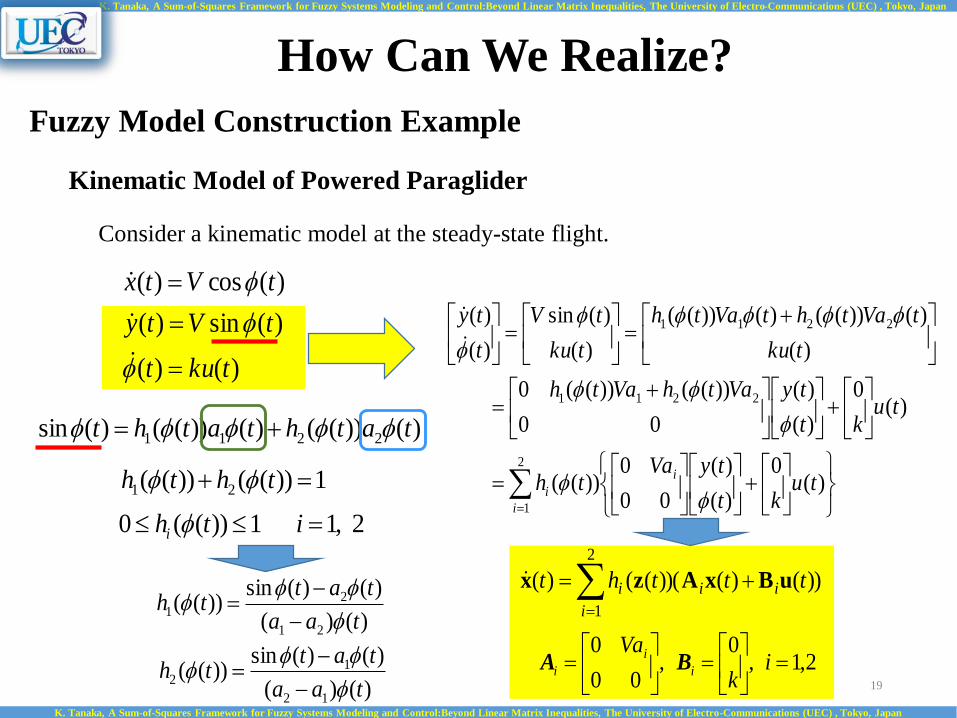
How Can We Realize?
Fuzzy Model Construction Example
Kinematic Model of Powered Paraglider
)()(
)(sin)(
)(cos)(
tkut
tVty
tVtx
)(sin ty
)(t
)()( 1 taty
)()( 2 taty
179 [deg.]-179 [deg.]
)())(()())(()(sin 2211 tathtatht
Consider a kinematic model at the steady-state flight.
1))(())(( 21 thth
2,11))((0 ithi
11 a
1801792 a)()(
)()(sin))((
21
21
taa
tatth
)()(
)()(sin))((
12
12
taa
tatth
K. Tanaka, A Sum-of-Squares Framework for Fuzzy Systems Modeling and Control:Beyond Linear Matrix Inequalities, The University of Electro-Communications (UEC) , Tokyo, Japan
K. Tanaka, A Sum-of-Squares Framework for Fuzzy Systems Modeling and Control:Beyond Linear Matrix Inequalities, The University of Electro-Communications (UEC) , Tokyo, Japan
18
How Can We Realize?
Fuzzy Model Construction Example
Kinematic Model of Powered Paraglider
)()(
)(sin)(
)(cos)(
tkut
tVty
tVtx
)())(()())(()(sin 2211 tathtatht
Consider a kinematic model at the steady-state flight.
1))(())(( 21 thth
2,11))((0 ithi
)()(
)()(sin))((
21
21
taa
tatth
)()(
)()(sin))((
12
12
taa
tatth
2
1
2211
2211
)(0
)(
)(
00
0))((
)(0
)(
)(
00
))(())((0
)(
)())(()())((
)(
)(sin
)(
)(
i
i
i tukt
tyVath
tukt
tyVathVath
tku
tVathtVath
tku
tV
t
ty
))()())((()(
2
1
tttht i
i
ii uBxAzx
2,1,0
,00
0
i
k
Vai
i
i BA
K. Tanaka, A Sum-of-Squares Framework for Fuzzy Systems Modeling and Control:Beyond Linear Matrix Inequalities, The University of Electro-Communications (UEC) , Tokyo, Japan
K. Tanaka, A Sum-of-Squares Framework for Fuzzy Systems Modeling and Control:Beyond Linear Matrix Inequalities, The University of Electro-Communications (UEC) , Tokyo, Japan
19

How Can We Realize?
Nonlinear System
))(),(()( ttft uxx
Fuzzy Controller
Takagi-Sugeno Fuzzy Model
)}()()){(()(1
tttht i
r
i
ii uBxAzx
)())(()(1
tthtr
i
ii xFzu
K. Tanaka, A Sum-of-Squares Framework for Fuzzy Systems Modeling and Control:Beyond Linear Matrix Inequalities, The University of Electro-Communications (UEC) , Tokyo, Japan
K. Tanaka, A Sum-of-Squares Framework for Fuzzy Systems Modeling and Control:Beyond Linear Matrix Inequalities, The University of Electro-Communications (UEC) , Tokyo, Japan
20

Fuzzy Controller
Takagi-Sugeno Fuzzy Model
)}()()){(()(1
tttht i
r
i
ii uBxAzx
)())(()(1
tthtr
i
ii xFzu
[PDC]
K. Tanaka and M. Sugeno,
Stability Analysis and Design of Fuzzy Control Systems,
Fuzzy Sets and Systems, Vol.45, pp.135 - 156 (1992).
Parallel Distributed
Compensation (PDC)
How Can We Realize?
K. Tanaka, A Sum-of-Squares Framework for Fuzzy Systems Modeling and Control:Beyond Linear Matrix Inequalities, The University of Electro-Communications (UEC) , Tokyo, Japan
K. Tanaka, A Sum-of-Squares Framework for Fuzzy Systems Modeling and Control:Beyond Linear Matrix Inequalities, The University of Electro-Communications (UEC) , Tokyo, Japan
21

Fuzzy model:
PDC controller:
shares the same membership function
tt i xFu Then
Parallel Distributed Compensation (PDC)
How Can We Realize?
K. Tanaka, A Sum-of-Squares Framework for Fuzzy Systems Modeling and Control:Beyond Linear Matrix Inequalities, The University of Electro-Communications (UEC) , Tokyo, Japan
K. Tanaka, A Sum-of-Squares Framework for Fuzzy Systems Modeling and Control:Beyond Linear Matrix Inequalities, The University of Electro-Communications (UEC) , Tokyo, Japan
22
Fuzzy Controller
Takagi-Sugeno Fuzzy Model
)}()()){(()(1
tttht i
r
i
ii uBxAzx
)())(()(1
tthtr
i
ii xFzu
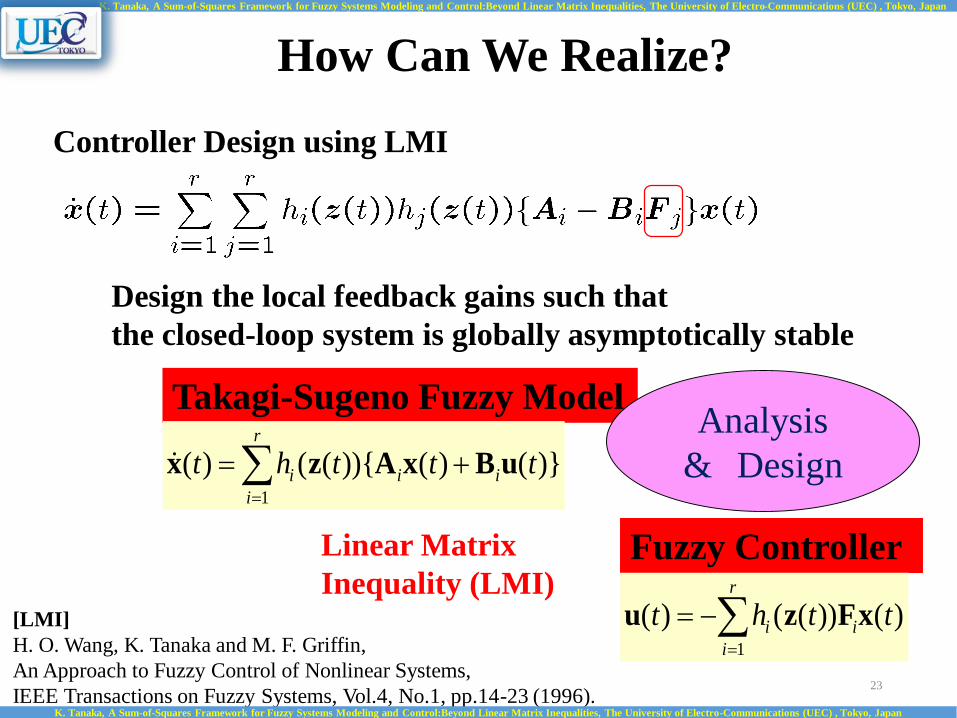
Design the local feedback gains such that
the closed-loop system is globally asymptotically stable
[LMI]
H. O. Wang, K. Tanaka and M. F. Griffin,
An Approach to Fuzzy Control of Nonlinear Systems,
IEEE Transactions on Fuzzy Systems, Vol.4, No.1, pp.14-23 (1996).
Linear Matrix
Inequality (LMI)
Analysis
& Design
Controller Design using LMI
How Can We Realize?
K. Tanaka, A Sum-of-Squares Framework for Fuzzy Systems Modeling and Control:Beyond Linear Matrix Inequalities, The University of Electro-Communications (UEC) , Tokyo, Japan
K. Tanaka, A Sum-of-Squares Framework for Fuzzy Systems Modeling and Control:Beyond Linear Matrix Inequalities, The University of Electro-Communications (UEC) , Tokyo, Japan
23

Part II T-S Fuzzy Model-based Control using Linear Matrix
Inequalities (LMIs)
Local linear system stability does not imply the global
stability of T-S fuzzy systems
Lyapunov stability theory
What are LMIs?
Three important theorems
Basic stabilization condition
Tutorial Overview
K. Tanaka, A Sum-of-Squares Framework for Fuzzy Systems Modeling and Control:Beyond Linear Matrix Inequalities, The University of Electro-Communications (UEC) , Tokyo, Japan
K. Tanaka, A Sum-of-Squares Framework for Fuzzy Systems Modeling and Control:Beyond Linear Matrix Inequalities, The University of Electro-Communications (UEC) , Tokyo, Japan
24

)())(()1(2
1
tthti
ii xAzx
r
i
i th
1
1))((z0))(( thi z
iAAll the are stable matrices
Consider the following (discrete) fuzzy system
Local stability does not imply
global stability
01
5.011A
01
5.012A
A natural question is that this fuzzy system is stable?
)()( 2 txt z
K. Tanaka and M. Sugeno,
Stability Analysis and Design of Fuzzy Control Systems,
Fuzzy Sets and Systems, Vol.45, pp.135 - 156 (1992).K. Tanaka, A Sum-of-Squares Framework for Fuzzy Systems Modeling and Control:Beyond Linear Matrix Inequalities, The University of Electro-Communications (UEC) , Tokyo, Japan
K. Tanaka, A Sum-of-Squares Framework for Fuzzy Systems Modeling and Control:Beyond Linear Matrix Inequalities, The University of Electro-Communications (UEC) , Tokyo, Japan
)(
)()(
2
1
tx
txtx
25
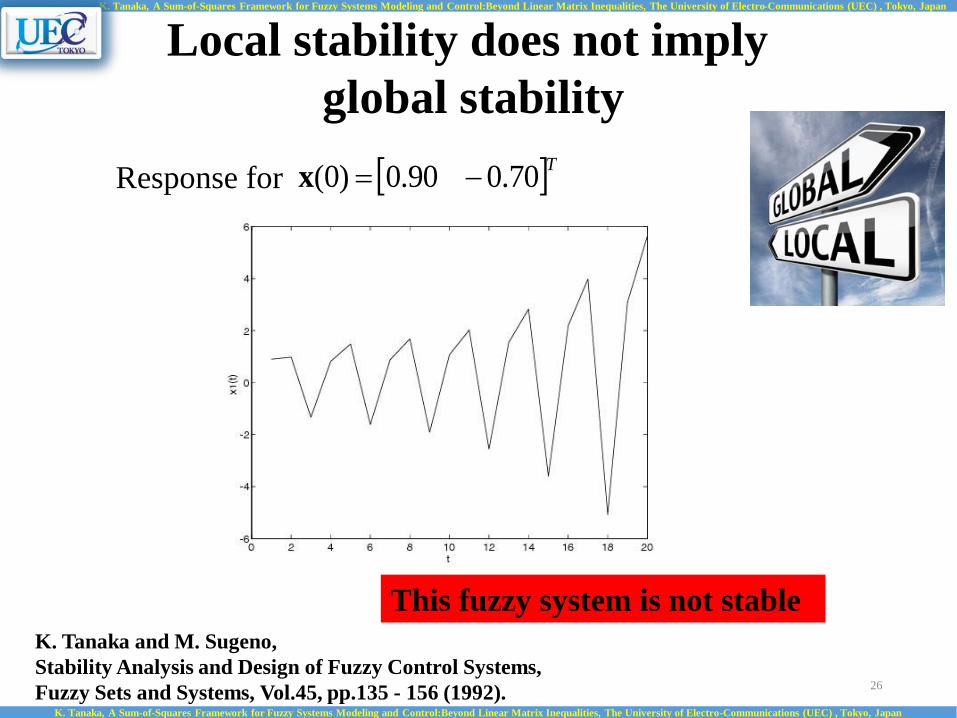
This fuzzy system is not stable
T70.090.0)0( xResponse for
K. Tanaka and M. Sugeno,
Stability Analysis and Design of Fuzzy Control Systems,
Fuzzy Sets and Systems, Vol.45, pp.135 - 156 (1992).K. Tanaka, A Sum-of-Squares Framework for Fuzzy Systems Modeling and Control:Beyond Linear Matrix Inequalities, The University of Electro-Communications (UEC) , Tokyo, Japan
K. Tanaka, A Sum-of-Squares Framework for Fuzzy Systems Modeling and Control:Beyond Linear Matrix Inequalities, The University of Electro-Communications (UEC) , Tokyo, Japan
Local stability does not imply
global stability
26
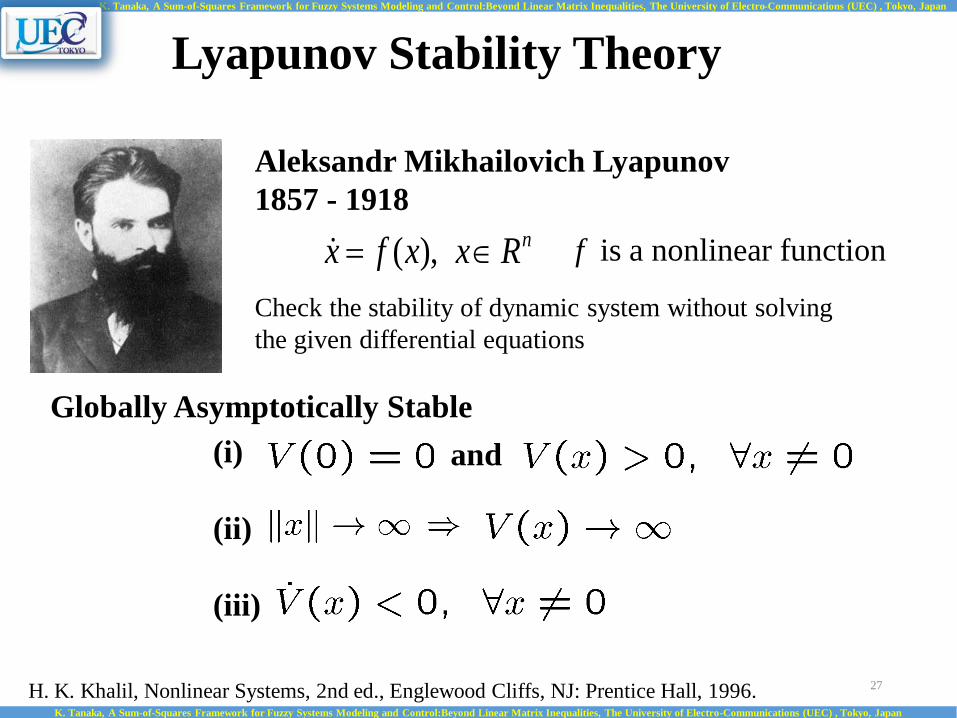
Aleksandr Mikhailovich Lyapunov
1857 - 1918
Globally Asymptotically Stable
and(i)
(ii)
(iii)
Check the stability of dynamic system without solving
the given differential equations
nRxxfx ),( f is a nonlinear function
Lyapunov Stability Theory
H. K. Khalil, Nonlinear Systems, 2nd ed., Englewood Cliffs, NJ: Prentice Hall, 1996.K. Tanaka, A Sum-of-Squares Framework for Fuzzy Systems Modeling and Control:Beyond Linear Matrix Inequalities, The University of Electro-Communications (UEC) , Tokyo, Japan
K. Tanaka, A Sum-of-Squares Framework for Fuzzy Systems Modeling and Control:Beyond Linear Matrix Inequalities, The University of Electro-Communications (UEC) , Tokyo, Japan
27

A linear matrix inequality (LMI) is any constraint of the form
where
● is a vector of unknown scalar
(the decision or optimization variable)
● are given matrices
● “ 0” stands for “positive definite”
● “ 0” stands for “negative definite”
What are LMIs?
0xA )(0xA )(
)()( xBxA 0xBxA )()(
0)(xA
K. Tanaka, A Sum-of-Squares Framework for Fuzzy Systems Modeling and Control:Beyond Linear Matrix Inequalities, The University of Electro-Communications (UEC) , Tokyo, Japan
K. Tanaka, A Sum-of-Squares Framework for Fuzzy Systems Modeling and Control:Beyond Linear Matrix Inequalities, The University of Electro-Communications (UEC) , Tokyo, Japan
28
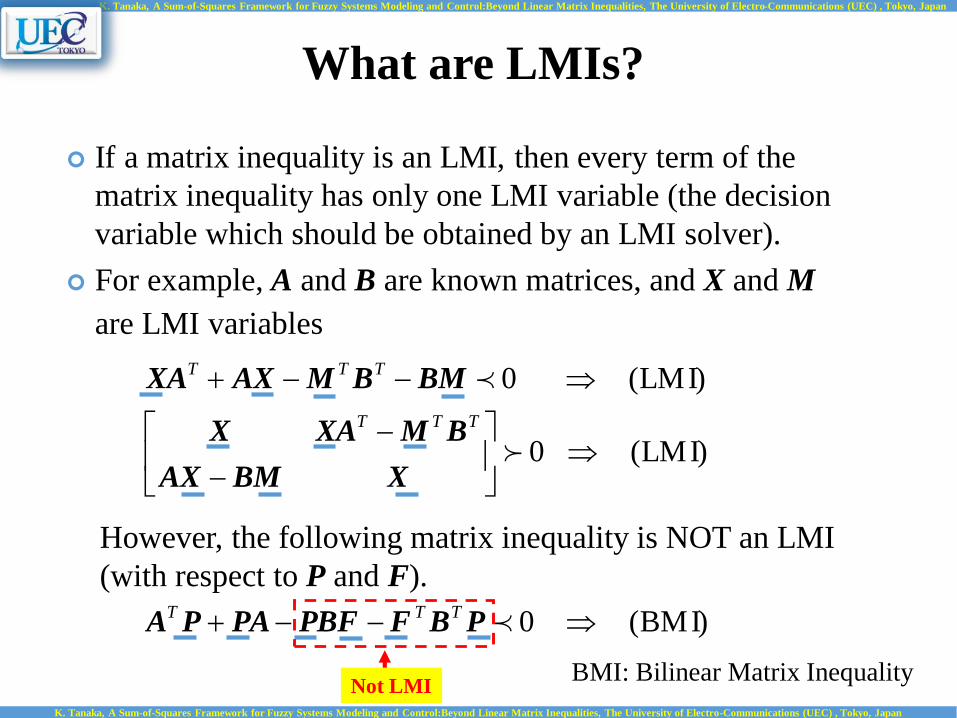
What are LMIs?
)BMI(0
)LMI(0
)LMI(0
PBFPBFPAPA
XBMAX
BMXAX
BMBMAXXA
TTT
TTT
TTT
If a matrix inequality is an LMI, then every term of the
matrix inequality has only one LMI variable (the decision
variable which should be obtained by an LMI solver).
For example, A and B are known matrices, and X and M
are LMI variables
BMI: Bilinear Matrix Inequality
K. Tanaka, A Sum-of-Squares Framework for Fuzzy Systems Modeling and Control:Beyond Linear Matrix Inequalities, The University of Electro-Communications (UEC) , Tokyo, Japan
K. Tanaka, A Sum-of-Squares Framework for Fuzzy Systems Modeling and Control:Beyond Linear Matrix Inequalities, The University of Electro-Communications (UEC) , Tokyo, Japan
However, the following matrix inequality is NOT an LMI
(with respect to P and F).
Not LMI

Three Important Theorems
- Schur Complement
- S-procedure
- Finsler’s Lemma
K. Tanaka, A Sum-of-Squares Framework for Fuzzy Systems Modeling and Control:Beyond Linear Matrix Inequalities, The University of Electro-Communications (UEC) , Tokyo, Japan
K. Tanaka, A Sum-of-Squares Framework for Fuzzy Systems Modeling and Control:Beyond Linear Matrix Inequalities, The University of Electro-Communications (UEC) , Tokyo, Japan
30
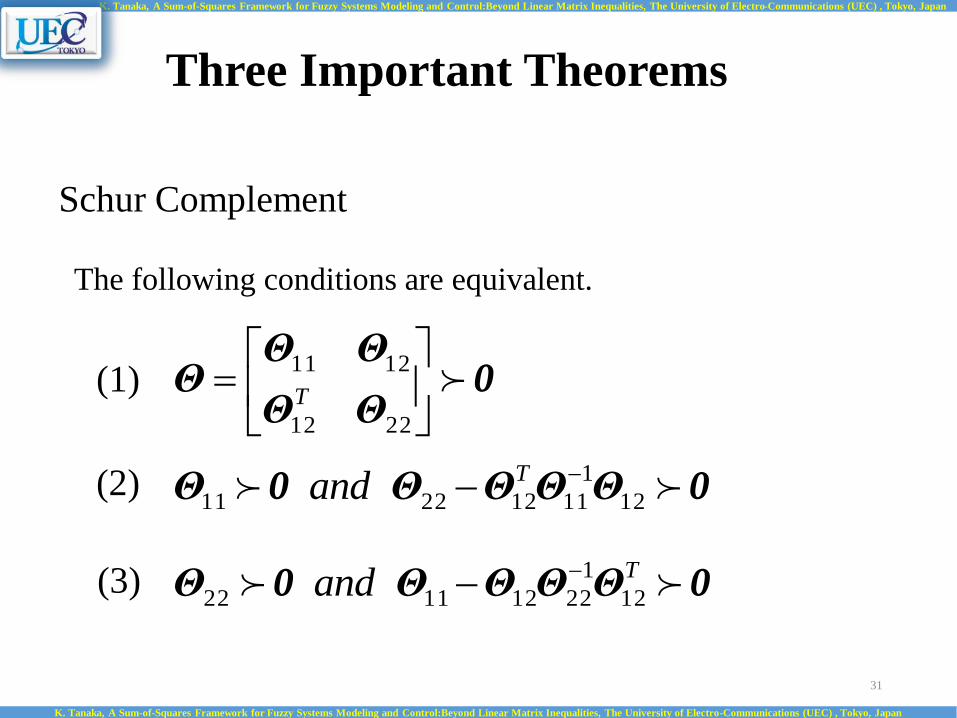
Three Important Theorems
Schur Complement
The following conditions are equivalent.
0ΘΘ
ΘΘΘ
2212
1211
T(1)
(2)
(3)
0ΘΘΘΘ0Θ 12
1
11122211
Tand
0ΘΘΘΘ0Θ Tand 12
1
22121122
K. Tanaka, A Sum-of-Squares Framework for Fuzzy Systems Modeling and Control:Beyond Linear Matrix Inequalities, The University of Electro-Communications (UEC) , Tokyo, Japan
K. Tanaka, A Sum-of-Squares Framework for Fuzzy Systems Modeling and Control:Beyond Linear Matrix Inequalities, The University of Electro-Communications (UEC) , Tokyo, Japan
31

(1)
then (1) holds.
Three Important Theorems
S-procedure
K. Tanaka, A Sum-of-Squares Framework for Fuzzy Systems Modeling and Control:Beyond Linear Matrix Inequalities, The University of Electro-Communications (UEC) , Tokyo, Japan
K. Tanaka, A Sum-of-Squares Framework for Fuzzy Systems Modeling and Control:Beyond Linear Matrix Inequalities, The University of Electro-Communications (UEC) , Tokyo, Japan
32

i)
ii)
iii)
Three Important Theorems
Finsler’s Lemma
K. Tanaka, A Sum-of-Squares Framework for Fuzzy Systems Modeling and Control:Beyond Linear Matrix Inequalities, The University of Electro-Communications (UEC) , Tokyo, Japan
K. Tanaka, A Sum-of-Squares Framework for Fuzzy Systems Modeling and Control:Beyond Linear Matrix Inequalities, The University of Electro-Communications (UEC) , Tokyo, Japan
33

Basic Stabilization Condition
Fuzzy Controller
Takagi-Sugeno Fuzzy Model
)}()()){(()(1
tttht i
r
i
ii uBxAzx
)())(()(1
tthtr
i
ii xFzu
Design the local feedback gains such that
the closed-loop system is globally asymptotically stable
[LMI]
H. O. Wang, K. Tanaka and M. F. Griffin,
An Approach to Fuzzy Control of Nonlinear Systems,
IEEE Transactions on Fuzzy Systems, Vol.4, No.1, pp.14-23 (1996).
Linear Matrix
Inequality (LMI)
Analysis
& Design
K. Tanaka, A Sum-of-Squares Framework for Fuzzy Systems Modeling and Control:Beyond Linear Matrix Inequalities, The University of Electro-Communications (UEC) , Tokyo, Japan
K. Tanaka, A Sum-of-Squares Framework for Fuzzy Systems Modeling and Control:Beyond Linear Matrix Inequalities, The University of Electro-Communications (UEC) , Tokyo, Japan
34

)()())(( tttV T Pxxx Quadratic Lyapunov Function
)()(
)()())(())((
)()()()())((
11
1 1
11
jii
T
jiiij
ij
Tr
i
r
j
ji
TT
ttthth
tttttV
FBAXXFBAG
xGxzz
xXxxXxx
0Gzz ij
r
i
r
j
ji thth 1 1
))(())((
0XP 1
Non-convex
Basic Stabilization Condition
BMI
K. Tanaka, A Sum-of-Squares Framework for Fuzzy Systems Modeling and Control:Beyond Linear Matrix Inequalities, The University of Electro-Communications (UEC) , Tokyo, Japan
K. Tanaka, A Sum-of-Squares Framework for Fuzzy Systems Modeling and Control:Beyond Linear Matrix Inequalities, The University of Electro-Communications (UEC) , Tokyo, Japan
35
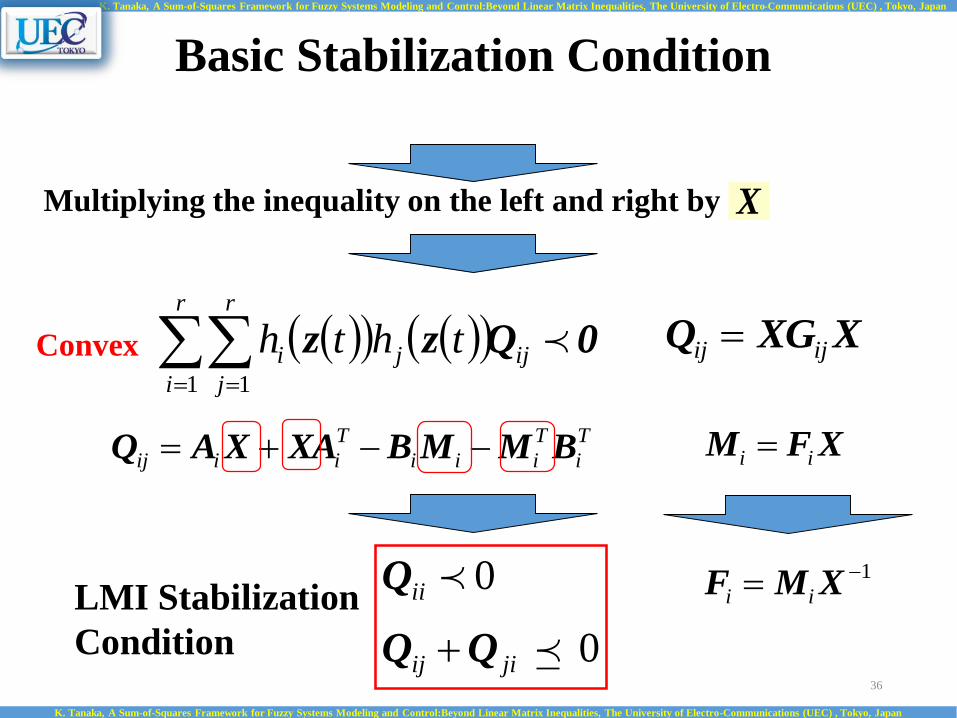
0Qzz ij
r
i
r
j
ji thth 1 1
T
i
T
iii
T
iiij BMMBXAXAQ XFM ii
0
0
jiij
ii
Q
LMI Stabilization
Condition
X
1 XMF ii
XXGQ ijij
Multiplying the inequality on the left and right by
Convex
Basic Stabilization Condition
K. Tanaka, A Sum-of-Squares Framework for Fuzzy Systems Modeling and Control:Beyond Linear Matrix Inequalities, The University of Electro-Communications (UEC) , Tokyo, Japan
K. Tanaka, A Sum-of-Squares Framework for Fuzzy Systems Modeling and Control:Beyond Linear Matrix Inequalities, The University of Electro-Communications (UEC) , Tokyo, Japan
36

Basic Stabilization Condition
Stable Controller Design Example
North
East
Current
Waypoint
Previous
Waypoint
Kinematic Model of Powered Paraglider
y
x
)()(
)(sin)(
tkut
tVty
Control Purpose
0)(lim,0)(lim
ttytt
2
1
)(0
)(
)(
00
0))((
)(
)(
i
i
i tukt
tyVath
t
ty
T-S Fuzzy Model
T-S Fuzzy Controller
2
1 )(
)())(()(
i
iit
tythtu
F Determined by
solving the LMIs
K. Tanaka, A Sum-of-Squares Framework for Fuzzy Systems Modeling and Control:Beyond Linear Matrix Inequalities, The University of Electro-Communications (UEC) , Tokyo, Japan
K. Tanaka, A Sum-of-Squares Framework for Fuzzy Systems Modeling and Control:Beyond Linear Matrix Inequalities, The University of Electro-Communications (UEC) , Tokyo, Japan
Constant Speed V
)(tu :Control bar angle
37
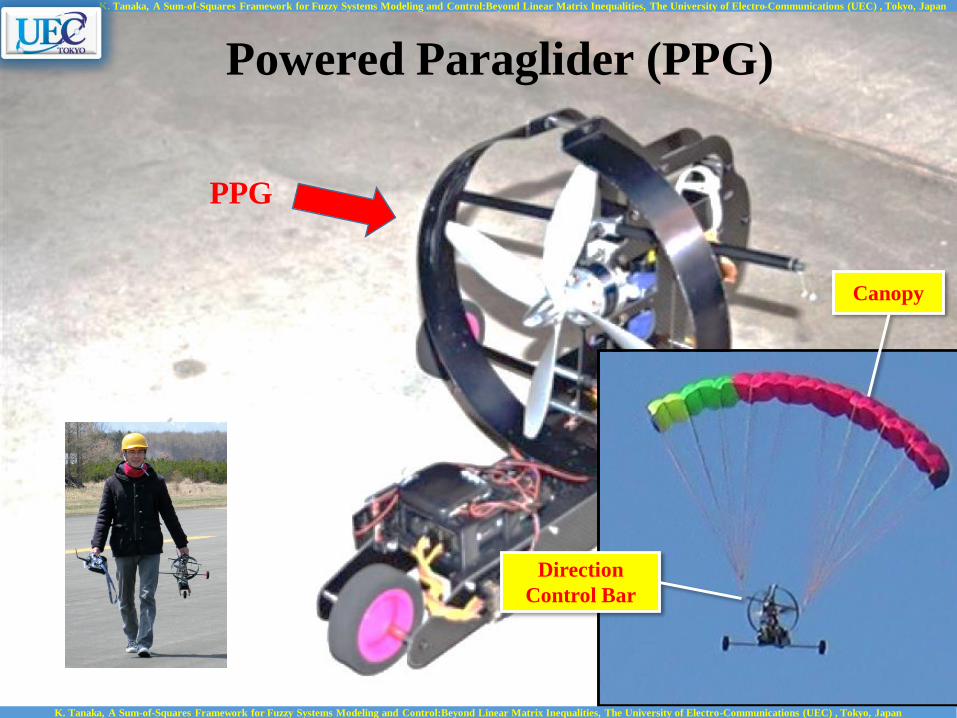
Canopy
Direction
Control Bar
K. Tanaka, A Sum-of-Squares Framework for Fuzzy Systems Modeling and Control:Beyond Linear Matrix Inequalities, The University of Electro-Communications (UEC) , Tokyo, Japan
K. Tanaka, A Sum-of-Squares Framework for Fuzzy Systems Modeling and Control:Beyond Linear Matrix Inequalities, The University of Electro-Communications (UEC) , Tokyo, Japan
PPG
Powered Paraglider (PPG)

Basic Stabilization Condition
Flight Experiments
JAXA(Japan Aerospace Exploration Agency)
K. Tanaka, A Sum-of-Squares Framework for Fuzzy Systems Modeling and Control:Beyond Linear Matrix Inequalities, The University of Electro-Communications (UEC) , Tokyo, Japan
K. Tanaka, A Sum-of-Squares Framework for Fuzzy Systems Modeling and Control:Beyond Linear Matrix Inequalities, The University of Electro-Communications (UEC) , Tokyo, Japan

JAXA Taiki Aerospace Research Field
K. Tanaka, A Sum-of-Squares Framework for Fuzzy Systems Modeling and Control:Beyond Linear Matrix Inequalities, The University of Electro-Communications (UEC) , Tokyo, Japan
K. Tanaka, A Sum-of-Squares Framework for Fuzzy Systems Modeling and Control:Beyond Linear Matrix Inequalities, The University of Electro-Communications (UEC) , Tokyo, Japan

K. Tanaka, A Sum-of-Squares Framework for Fuzzy Systems Modeling and Control:Beyond Linear Matrix Inequalities, The University of Electro-Communications (UEC) , Tokyo, Japan
K. Tanaka, A Sum-of-Squares Framework for Fuzzy Systems Modeling and Control:Beyond Linear Matrix Inequalities, The University of Electro-Communications (UEC) , Tokyo, Japan
JAXA Taiki Aerospace Research Field
UAV research group
students work hard
from 5 AM to 5 PM

K. Tanaka, A Sum-of-Squares Framework for Fuzzy Systems Modeling and Control:Beyond Linear Matrix Inequalities, The University of Electro-Communications (UEC) , Tokyo, Japan
K. Tanaka, A Sum-of-Squares Framework for Fuzzy Systems Modeling and Control:Beyond Linear Matrix Inequalities, The University of Electro-Communications (UEC) , Tokyo, Japan
JAXA Taiki Aerospace Research Field

K. Tanaka, A Sum-of-Squares Framework for Fuzzy Systems Modeling and Control:Beyond Linear Matrix Inequalities, The University of Electro-Communications (UEC) , Tokyo, Japan
K. Tanaka, A Sum-of-Squares Framework for Fuzzy Systems Modeling and Control:Beyond Linear Matrix Inequalities, The University of Electro-Communications (UEC) , Tokyo, Japan
JAXA Taiki Aerospace Research Field
PPG Flight via
Fuzzy Model-based Control

Basic Stabilization Condition
Stable control including
automatic landing is
realized via the LMI-
based fuzzy controller
Automatic Landing
Flight Experiments
Altitude Control
M Tanaka, H Kawai, K Tanaka, HO Wang, Development of an autonomous flying robot and its verification
via flight control experiment, IEEE Int. Conf. on Robotics and Automation (ICRA), pp.4439-4444 2013
K. Tanaka, A Sum-of-Squares Framework for Fuzzy Systems Modeling and Control:Beyond Linear Matrix Inequalities, The University of Electro-Communications (UEC) , Tokyo, Japan
K. Tanaka, A Sum-of-Squares Framework for Fuzzy Systems Modeling and Control:Beyond Linear Matrix Inequalities, The University of Electro-Communications (UEC) , Tokyo, Japan
44
Basic Stabilization Condition
K. Tanaka, A Sum-of-Squares Framework for Fuzzy Systems Modeling and Control:Beyond Linear Matrix Inequalities, The University of Electro-Communications (UEC) , Tokyo, Japan
K. Tanaka, A Sum-of-Squares Framework for Fuzzy Systems Modeling and Control:Beyond Linear Matrix Inequalities, The University of Electro-Communications (UEC) , Tokyo, Japan
https://www.youtube.com/watch?v=t5agDDQ7lQM
Flight Experiments (Video)
Stable waypoint following control and altitude control + automatic landing!
Part III Theoretical Advances in T-S Fuzzy Model-based Control
using LMIs
Double Summation Relaxation
Generalized Lyapunov Function Approaches
Other Relaxations
Tutorial Overview
K. Tanaka, A Sum-of-Squares Framework for Fuzzy Systems Modeling and Control:Beyond Linear Matrix Inequalities, The University of Electro-Communications (UEC) , Tokyo, Japan
K. Tanaka, A Sum-of-Squares Framework for Fuzzy Systems Modeling and Control:Beyond Linear Matrix Inequalities, The University of Electro-Communications (UEC) , Tokyo, Japan
46
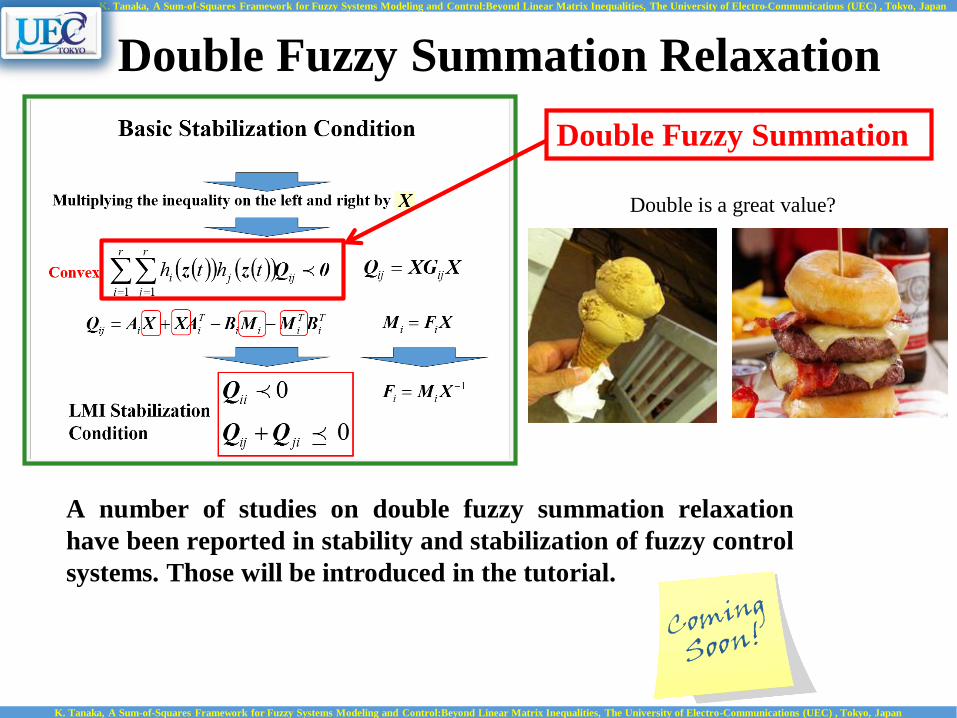
Double Fuzzy Summation Relaxation
Double Fuzzy Summation
A number of studies on double fuzzy summation relaxation
have been reported in stability and stabilization of fuzzy control
systems. Those will be introduced in the tutorial.
Double is a great value?
K. Tanaka, A Sum-of-Squares Framework for Fuzzy Systems Modeling and Control:Beyond Linear Matrix Inequalities, The University of Electro-Communications (UEC) , Tokyo, Japan
K. Tanaka, A Sum-of-Squares Framework for Fuzzy Systems Modeling and Control:Beyond Linear Matrix Inequalities, The University of Electro-Communications (UEC) , Tokyo, Japan

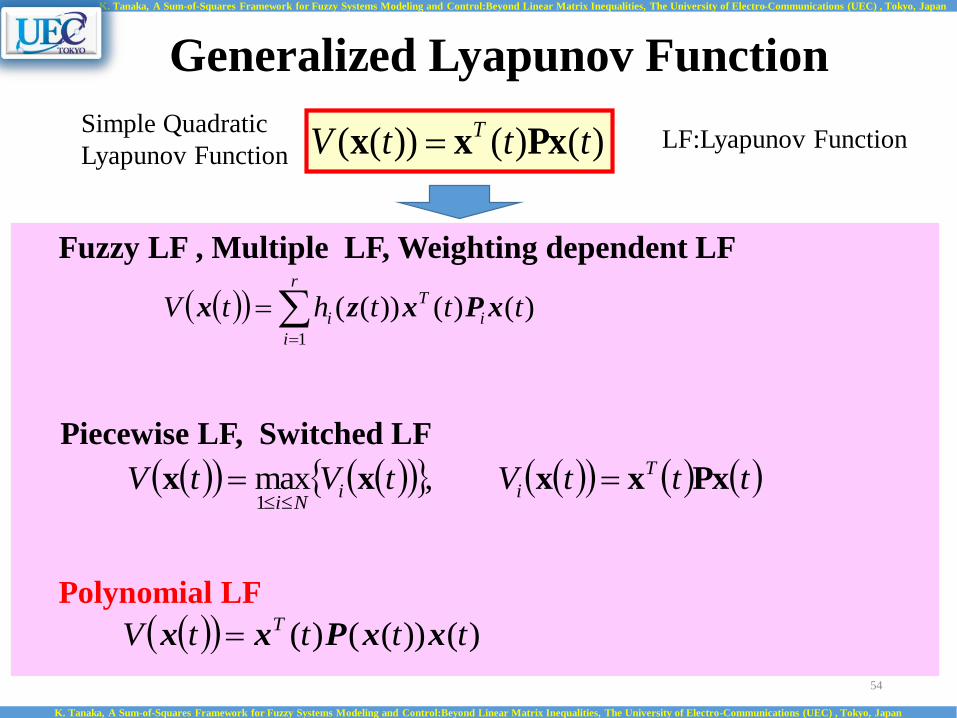
Fuzzy LF , Multiple LF, Weighting dependent LF
Piecewise LF, Switched LF
tttVtVtV T
iiNi
Pxxxxx
,max1
Polynomial LF
)())(()( ttttV T xxPxx
r
i
i
T
i ttthtV1
)()())(( xPxzx
Generalized Lyapunov Function
)()())(( tttV T Pxxx Simple Quadratic
Lyapunov Function
K. Tanaka, A Sum-of-Squares Framework for Fuzzy Systems Modeling and Control:Beyond Linear Matrix Inequalities, The University of Electro-Communications (UEC) , Tokyo, Japan
K. Tanaka, A Sum-of-Squares Framework for Fuzzy Systems Modeling and Control:Beyond Linear Matrix Inequalities, The University of Electro-Communications (UEC) , Tokyo, Japan
LF:Lyapunov Function
48
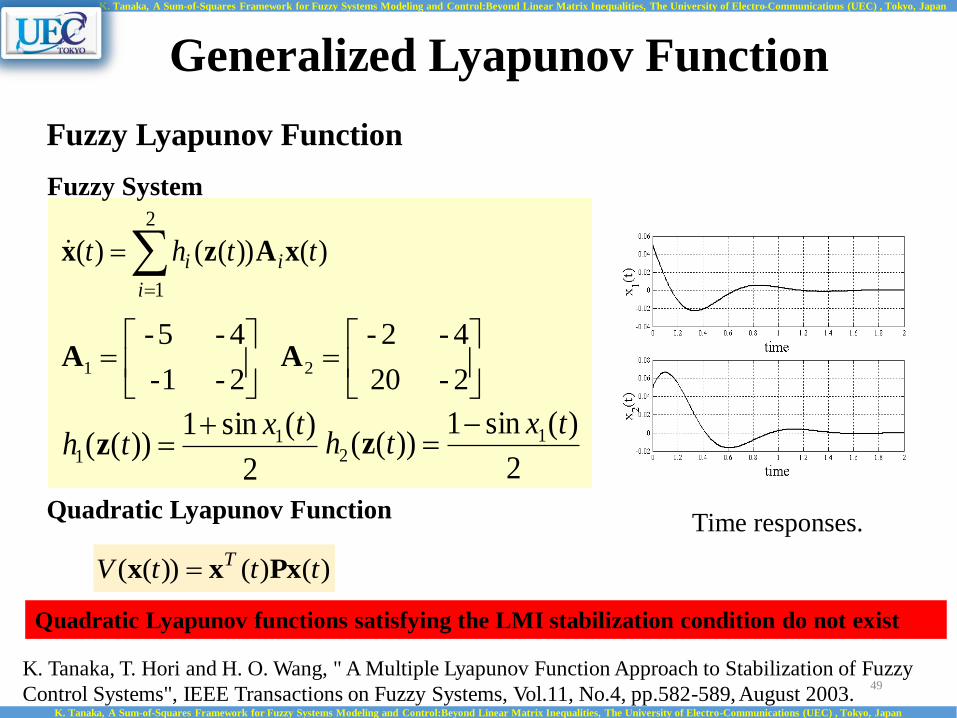
Time responses.
2-20
4- 2-
2-1-
4- 5- 21 AA
2
)(sin1))(( 1
1
txth
z
2
)(sin1))(( 1
2
txth
z
Quadratic Lyapunov functions satisfying the LMI stabilization condition do not exist
)()())(( tttV TPxxx
)())(()(
2
1
ttht
i
ii xAzx
Fuzzy System
Quadratic Lyapunov Function
K. Tanaka, T. Hori and H. O. Wang, " A Multiple Lyapunov Function Approach to Stabilization of Fuzzy
Control Systems", IEEE Transactions on Fuzzy Systems, Vol.11, No.4, pp.582-589, August 2003.
Generalized Lyapunov Function
Fuzzy Lyapunov Function
K. Tanaka, A Sum-of-Squares Framework for Fuzzy Systems Modeling and Control:Beyond Linear Matrix Inequalities, The University of Electro-Communications (UEC) , Tokyo, Japan
K. Tanaka, A Sum-of-Squares Framework for Fuzzy Systems Modeling and Control:Beyond Linear Matrix Inequalities, The University of Electro-Communications (UEC) , Tokyo, Japan
49
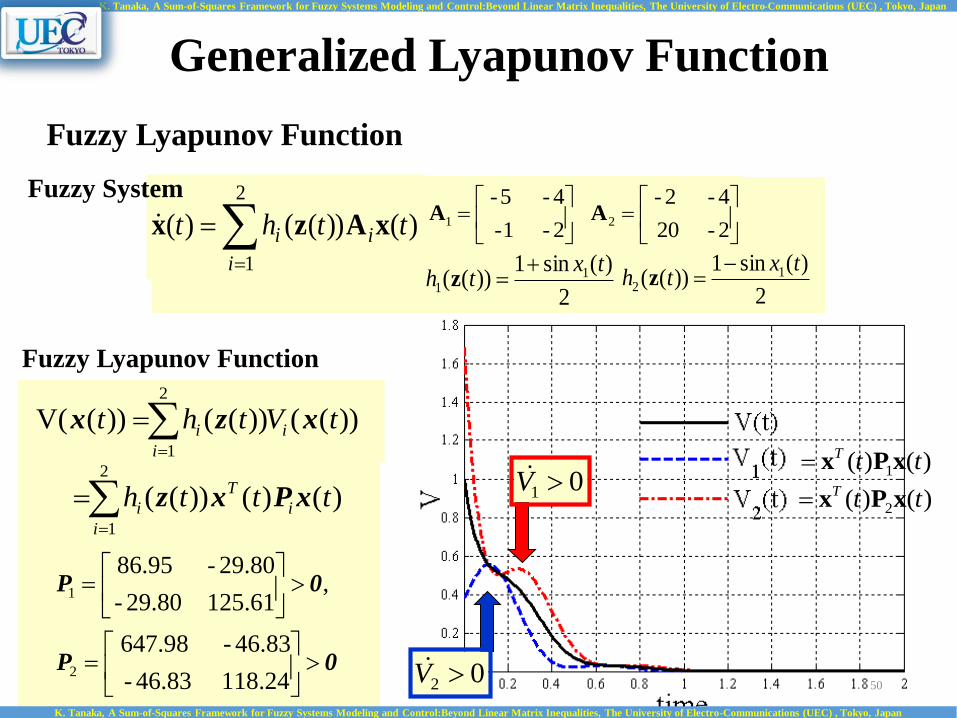
2-20
4- 2-
2-1-
4- 5- 21 AA
2
)(sin1))(( 1
1
txth
z
2
)(sin1))(( 1
2
txth
z
)())(()(
2
1
ttht
i
ii xAzx
Fuzzy System
)()())((2
1
i
i
T
i ttth xPxz
Fuzzy Lyapunov Function
0P
0P
118.2446.83-
46.83- 647.98
,125.6129.80-
29.80- 86.95
2
1
)()( 1 ttT xPx
)()( 2 ttT xPx01 V
02 V
))(())(())((V2
1
i
ii tVtht xzx
Fuzzy Lyapunov Function
Generalized Lyapunov Function
K. Tanaka, A Sum-of-Squares Framework for Fuzzy Systems Modeling and Control:Beyond Linear Matrix Inequalities, The University of Electro-Communications (UEC) , Tokyo, Japan
K. Tanaka, A Sum-of-Squares Framework for Fuzzy Systems Modeling and Control:Beyond Linear Matrix Inequalities, The University of Electro-Communications (UEC) , Tokyo, Japan
50

Fuzzy LF , Multiple LF, Weighting dependent LF
Piecewise LF, Switched LF
tttVtVtV T
iiNi
Pxxxxx
,max1
Polynomial LF
)())(()( ttttV T xxPxx
r
i
i
T
i ttthtV1
)()())(( xPxzx
Generalized Lyapunov Function
)()())(( tttV T Pxxx Simple Quadratic
Lyapunov Function
K. Tanaka, A Sum-of-Squares Framework for Fuzzy Systems Modeling and Control:Beyond Linear Matrix Inequalities, The University of Electro-Communications (UEC) , Tokyo, Japan
K. Tanaka, A Sum-of-Squares Framework for Fuzzy Systems Modeling and Control:Beyond Linear Matrix Inequalities, The University of Electro-Communications (UEC) , Tokyo, Japan
LF:Lyapunov Function
51
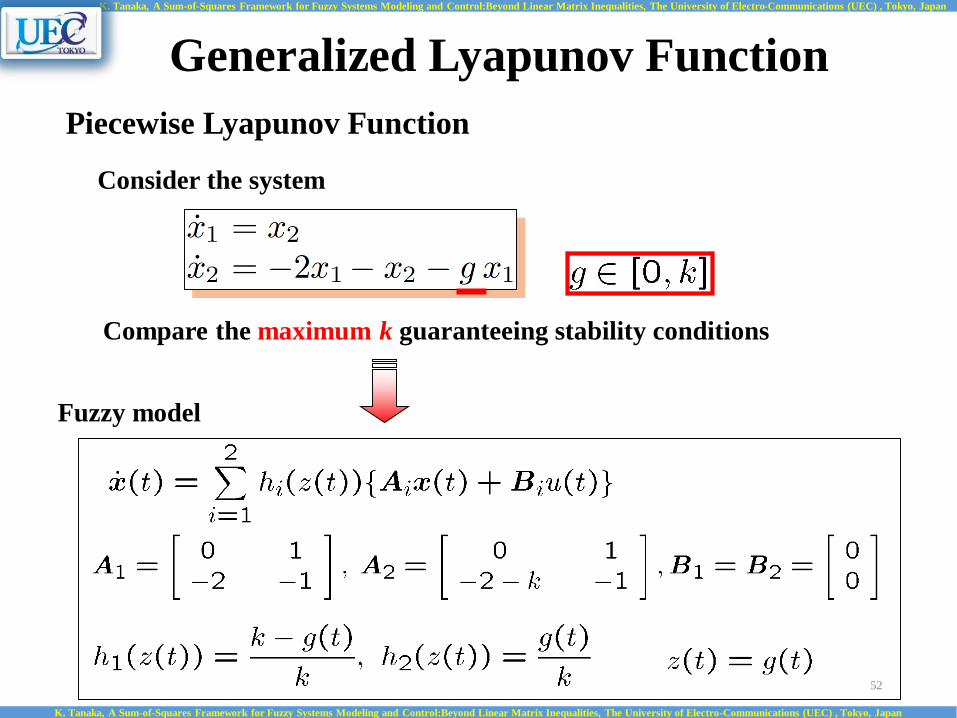
Piecewise Lyapunov Function
Consider the system
Compare the maximum k guaranteeing stability conditions
Fuzzy model
Generalized Lyapunov Function
K. Tanaka, A Sum-of-Squares Framework for Fuzzy Systems Modeling and Control:Beyond Linear Matrix Inequalities, The University of Electro-Communications (UEC) , Tokyo, Japan
K. Tanaka, A Sum-of-Squares Framework for Fuzzy Systems Modeling and Control:Beyond Linear Matrix Inequalities, The University of Electro-Communications (UEC) , Tokyo, Japan
52

Consider the system
Compare the maximum k guaranteeing stability conditions
)()())(( tttV TPxxx
Quadratic Lyapunov Function
Piecewise Lyapunov Function [1]
[1]L. Xie, S. Shishkin and M. Fu, “Piecewise Lyapunov Functions for Robust Stability of
Linear Time-Varying Systems”, Systems & Control Letters 31 pp.165-171, 1997.
)}()(),()(max{))(( 21 tttttV TTxPxxPxx
Piecewise Lyapunov Function
Generalized Lyapunov Function
K. Tanaka, A Sum-of-Squares Framework for Fuzzy Systems Modeling and Control:Beyond Linear Matrix Inequalities, The University of Electro-Communications (UEC) , Tokyo, Japan
K. Tanaka, A Sum-of-Squares Framework for Fuzzy Systems Modeling and Control:Beyond Linear Matrix Inequalities, The University of Electro-Communications (UEC) , Tokyo, Japan
53
Fuzzy LF , Multiple LF, Weighting dependent LF
Piecewise LF, Switched LF
tttVtVtV T
iiNi
Pxxxxx
,max1
Polynomial LF
)())(()( ttttV T xxPxx
r
i
i
T
i ttthtV1
)()())(( xPxzx
Generalized Lyapunov Function
)()())(( tttV T Pxxx Simple Quadratic
Lyapunov Function
K. Tanaka, A Sum-of-Squares Framework for Fuzzy Systems Modeling and Control:Beyond Linear Matrix Inequalities, The University of Electro-Communications (UEC) , Tokyo, Japan
K. Tanaka, A Sum-of-Squares Framework for Fuzzy Systems Modeling and Control:Beyond Linear Matrix Inequalities, The University of Electro-Communications (UEC) , Tokyo, Japan
LF:Lyapunov Function
54
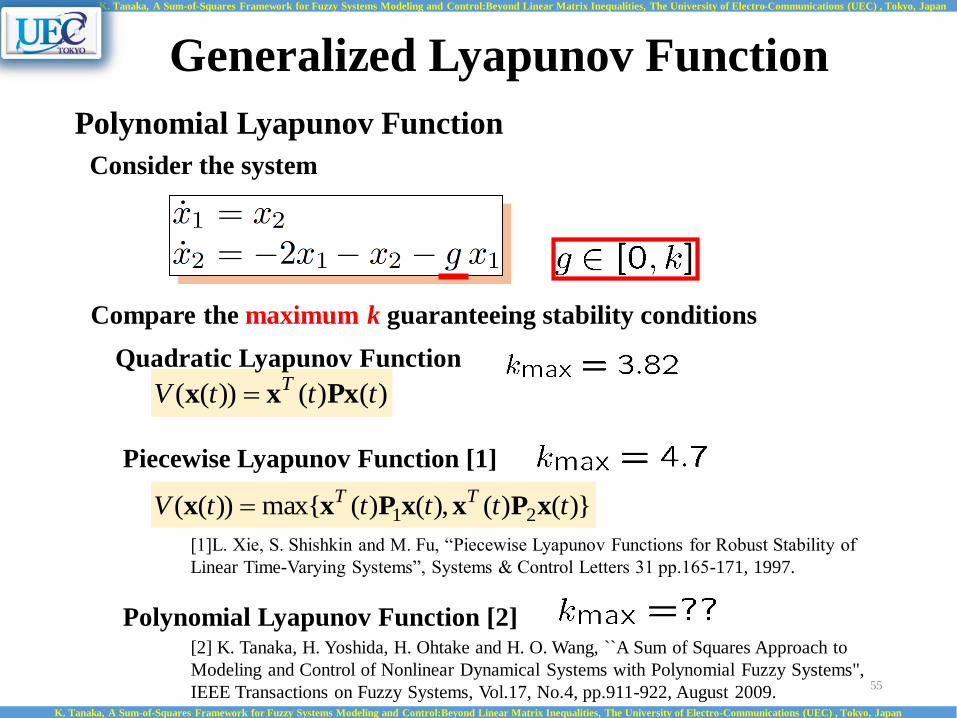
Consider the system
Compare the maximum k guaranteeing stability conditions
)()())(( tttV TPxxx
Quadratic Lyapunov Function
Piecewise Lyapunov Function [1]
[1]L. Xie, S. Shishkin and M. Fu, “Piecewise Lyapunov Functions for Robust Stability of
Linear Time-Varying Systems”, Systems & Control Letters 31 pp.165-171, 1997.
Polynomial Lyapunov Function [2]
)}()(),()(max{))(( 21 tttttV TTxPxxPxx
[2] K. Tanaka, H. Yoshida, H. Ohtake and H. O. Wang, ``A Sum of Squares Approach to
Modeling and Control of Nonlinear Dynamical Systems with Polynomial Fuzzy Systems",
IEEE Transactions on Fuzzy Systems, Vol.17, No.4, pp.911-922, August 2009.
Polynomial Lyapunov Function
Generalized Lyapunov Function
K. Tanaka, A Sum-of-Squares Framework for Fuzzy Systems Modeling and Control:Beyond Linear Matrix Inequalities, The University of Electro-Communications (UEC) , Tokyo, Japan
K. Tanaka, A Sum-of-Squares Framework for Fuzzy Systems Modeling and Control:Beyond Linear Matrix Inequalities, The University of Electro-Communications (UEC) , Tokyo, Japan
55

Order of polynomial Lyapunov function
maxk
4.7
Quadratic Lyapunov Function
Piecewise Lyapunov Function
Polynomial Lyapunov Function
Generalized Lyapunov Function
K. Tanaka, A Sum-of-Squares Framework for Fuzzy Systems Modeling and Control:Beyond Linear Matrix Inequalities, The University of Electro-Communications (UEC) , Tokyo, Japan
K. Tanaka, A Sum-of-Squares Framework for Fuzzy Systems Modeling and Control:Beyond Linear Matrix Inequalities, The University of Electro-Communications (UEC) , Tokyo, Japan
56
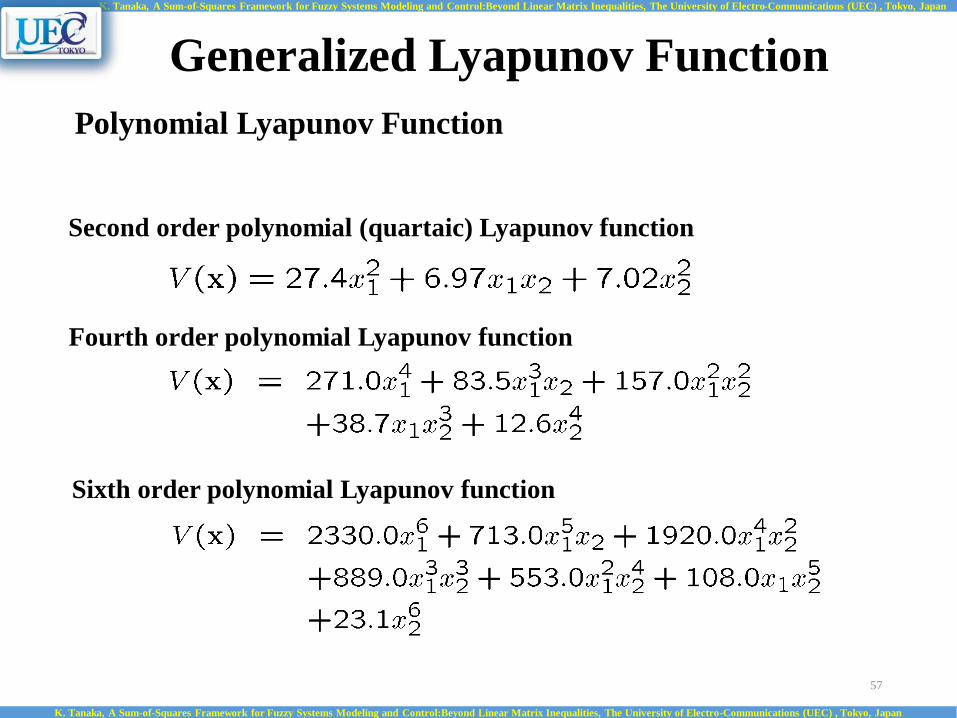
Second order polynomial (quartaic) Lyapunov function
Fourth order polynomial Lyapunov function
Sixth order polynomial Lyapunov function
Polynomial Lyapunov Function
Generalized Lyapunov Function
K. Tanaka, A Sum-of-Squares Framework for Fuzzy Systems Modeling and Control:Beyond Linear Matrix Inequalities, The University of Electro-Communications (UEC) , Tokyo, Japan
K. Tanaka, A Sum-of-Squares Framework for Fuzzy Systems Modeling and Control:Beyond Linear Matrix Inequalities, The University of Electro-Communications (UEC) , Tokyo, Japan
57

Eighth order polynomial Lyapunov function
Tenth order polynomial Lyapunov function
Polynomial Lyapunov Function
Generalized Lyapunov Function
K. Tanaka, A Sum-of-Squares Framework for Fuzzy Systems Modeling and Control:Beyond Linear Matrix Inequalities, The University of Electro-Communications (UEC) , Tokyo, Japan
K. Tanaka, A Sum-of-Squares Framework for Fuzzy Systems Modeling and Control:Beyond Linear Matrix Inequalities, The University of Electro-Communications (UEC) , Tokyo, Japan
58
Generalized Lyapunov Function
More relaxed stability results by other generalized
Lyapunov functions will be presented in the tutorial.
K. Tanaka, A Sum-of-Squares Framework for Fuzzy Systems Modeling and Control:Beyond Linear Matrix Inequalities, The University of Electro-Communications (UEC) , Tokyo, Japan
K. Tanaka, A Sum-of-Squares Framework for Fuzzy Systems Modeling and Control:Beyond Linear Matrix Inequalities, The University of Electro-Communications (UEC) , Tokyo, Japan
59

Generalized Lyapunov Function
SOS Approach
☆Beyond LMIs
K. Tanaka, A Sum-of-Squares Framework for Fuzzy Systems Modeling and Control:Beyond Linear Matrix Inequalities, The University of Electro-Communications (UEC) , Tokyo, Japan
K. Tanaka, A Sum-of-Squares Framework for Fuzzy Systems Modeling and Control:Beyond Linear Matrix Inequalities, The University of Electro-Communications (UEC) , Tokyo, Japan
Polynomial LF is
most powerful!
From
LMI
To
SOS
60

Other Relaxations
Other relaxations will be introduced in the tutorial.
K. Tanaka, A Sum-of-Squares Framework for Fuzzy Systems Modeling and Control:Beyond Linear Matrix Inequalities, The University of Electro-Communications (UEC) , Tokyo, Japan
K. Tanaka, A Sum-of-Squares Framework for Fuzzy Systems Modeling and Control:Beyond Linear Matrix Inequalities, The University of Electro-Communications (UEC) , Tokyo, Japan
61

Part IV Beyond LMIs: Polynomial Fuzzy Systems Control and
Analysis using Sum-of- Squares (SOS)
What is Sum of Squares (SOS)
What is polynomial fuzzy systems (PFS) control
T-S fuzzy model VS Polynomial fuzzy model
SOS-based Design
Design Example
Micro Helicopter Control Example
Recent Topics
Tutorial Overview
K. Tanaka, A Sum-of-Squares Framework for Fuzzy Systems Modeling and Control:Beyond Linear Matrix Inequalities, The University of Electro-Communications (UEC) , Tokyo, Japan
K. Tanaka, A Sum-of-Squares Framework for Fuzzy Systems Modeling and Control:Beyond Linear Matrix Inequalities, The University of Electro-Communications (UEC) , Tokyo, Japan
62
What is SOS?
K. Tanaka, A Sum-of-Squares Framework for Fuzzy Systems Modeling and Control:Beyond Linear Matrix Inequalities, The University of Electro-Communications (UEC) , Tokyo, Japan
K. Tanaka, A Sum-of-Squares Framework for Fuzzy Systems Modeling and Control:Beyond Linear Matrix Inequalities, The University of Electro-Communications (UEC) , Tokyo, Japan
63

A multivariate polynomial is
a sum of squares (SOS) if there exist polynomials
such that
e.g.
Clearly, is an SOS ⇒
is an SOS, where
What is SOS?
K. Tanaka, A Sum-of-Squares Framework for Fuzzy Systems Modeling and Control:Beyond Linear Matrix Inequalities, The University of Electro-Communications (UEC) , Tokyo, Japan
K. Tanaka, A Sum-of-Squares Framework for Fuzzy Systems Modeling and Control:Beyond Linear Matrix Inequalities, The University of Electro-Communications (UEC) , Tokyo, Japan
Positive
definite
polynomial
⇒
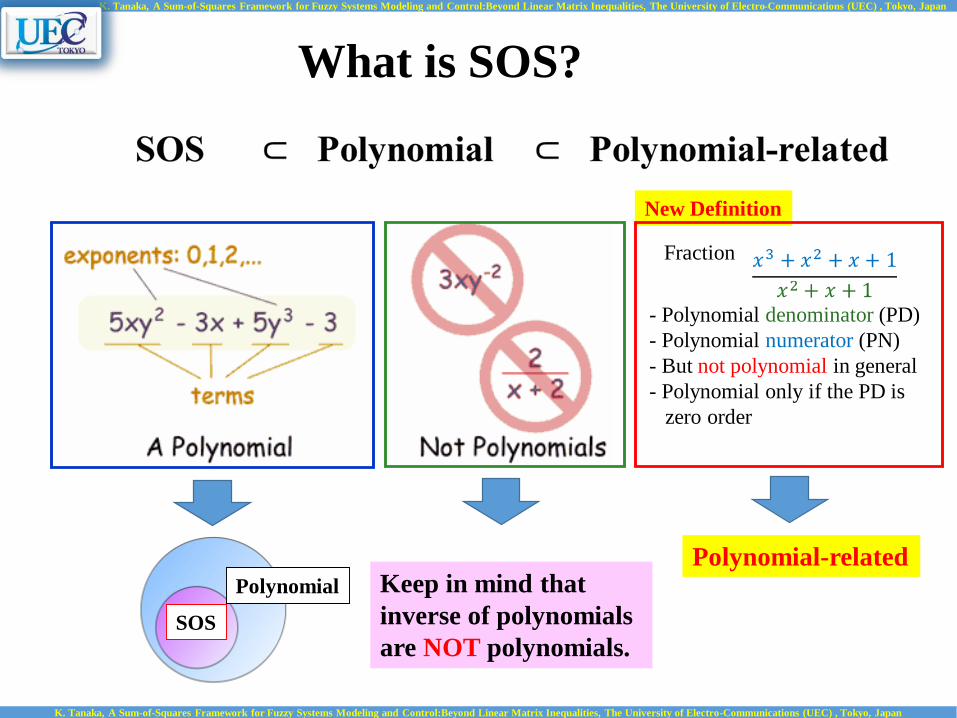
Polynomial
SOS
Keep in mind that
inverse of polynomials
are NOT polynomials.
K. Tanaka, A Sum-of-Squares Framework for Fuzzy Systems Modeling and Control:Beyond Linear Matrix Inequalities, The University of Electro-Communications (UEC) , Tokyo, Japan
K. Tanaka, A Sum-of-Squares Framework for Fuzzy Systems Modeling and Control:Beyond Linear Matrix Inequalities, The University of Electro-Communications (UEC) , Tokyo, Japan
What is SOS?
New Definition
- Polynomial denominator (PD)
- Polynomial numerator (PN)
- But not polynomial in general
- Polynomial only if the PD is
zero order
Fraction
Polynomial-related
K. Tanaka, A Sum-of-Squares Framework for Fuzzy Systems Modeling and Control:Beyond Linear Matrix Inequalities, The University of Electro-Communications (UEC) , Tokyo, Japan
K. Tanaka, A Sum-of-Squares Framework for Fuzzy Systems Modeling and Control:Beyond Linear Matrix Inequalities, The University of Electro-Communications (UEC) , Tokyo, Japan
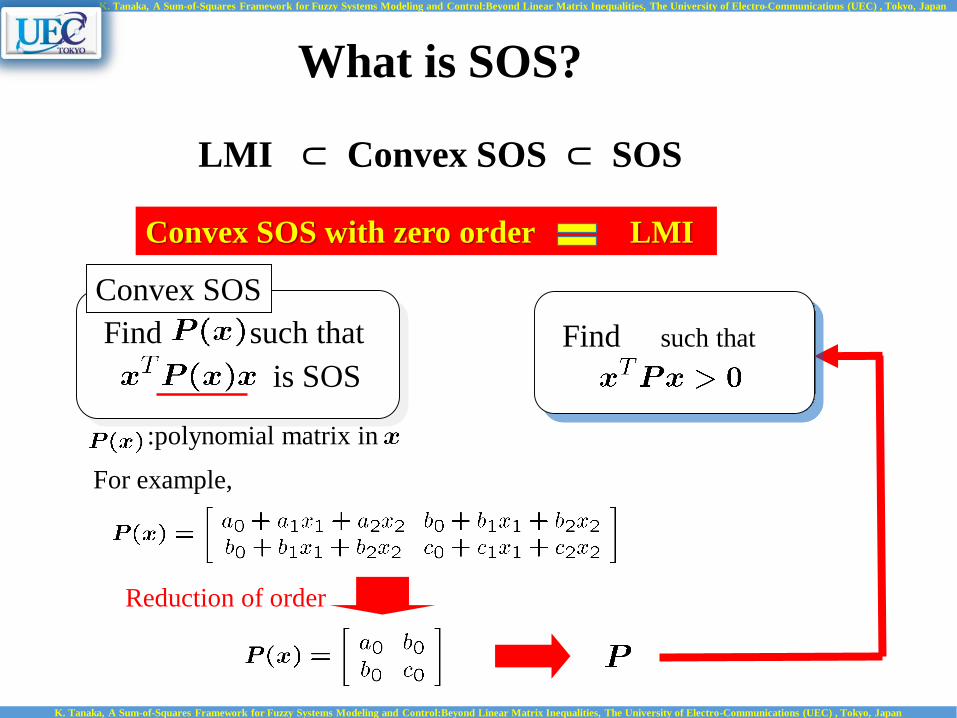
Convex SOS with zero order LMI
Convex SOS
is SOS
Find such that
:polynomial matrix in
For example,
Reduction of order
Find such that
What is SOS?
LMI ⊂ Convex SOS ⊂ SOS

0xM
How about the converse? NO!
13),( 2
2
2
1
4
1
2
2
4
2
2
121 xxxxxxxxM
What is SOS?
A polynomial M(x) is an SOS
0, 21 xxM
However, is not an SOS 21, xxM
K. Tanaka, A Sum-of-Squares Framework for Fuzzy Systems Modeling and Control:Beyond Linear Matrix Inequalities, The University of Electro-Communications (UEC) , Tokyo, Japan
K. Tanaka, A Sum-of-Squares Framework for Fuzzy Systems Modeling and Control:Beyond Linear Matrix Inequalities, The University of Electro-Communications (UEC) , Tokyo, Japan
Polynomial
SOS
Properties of SOS

SOSan is21
12
2
2
2
2
1
2
1
2
1
21
21
21 xxxxx
x
xx
xxxx
x allfor PSDnot is1
1
21
21
xx
xx
NT Rtttt xxxFx whereSOS,an is
Is it satisfied that ? NO!
Hence, to show , we need
What is SOS?
Properties of SOS
It is clear that
However
K. Tanaka, A Sum-of-Squares Framework for Fuzzy Systems Modeling and Control:Beyond Linear Matrix Inequalities, The University of Electro-Communications (UEC) , Tokyo, Japan
K. Tanaka, A Sum-of-Squares Framework for Fuzzy Systems Modeling and Control:Beyond Linear Matrix Inequalities, The University of Electro-Communications (UEC) , Tokyo, Japan
independent of x(t)
What is PFS Control?
K. Tanaka, A Sum-of-Squares Framework for Fuzzy Systems Modeling and Control:Beyond Linear Matrix Inequalities, The University of Electro-Communications (UEC) , Tokyo, Japan
K. Tanaka, A Sum-of-Squares Framework for Fuzzy Systems Modeling and Control:Beyond Linear Matrix Inequalities, The University of Electro-Communications (UEC) , Tokyo, Japan
69

Nonlinear System
Polynomial Fuzzy Model
))(),(()( ttft uxx
K. Tanaka, H. Yoshida, H. Ohtake and H. O. Wang,
A Sum of Squares Approach to Modeling and Control
of Nonlinear Dynamical Systems with Polynomial Fuzzy Systems,
IEEE Transactions on Fuzzy Systems, Vol.17, No.4, pp.911-922, August 2009.
)}())(()(ˆ))(()){(()(1
tttttht i
r
i
ii uxBxxAzx
)(ˆ))(~()(ˆ ttttV T xxPxx
)(ˆ))(())(()(1
ttthtr
i
ii xxFzu
Polynomial-related Lyapunov Function
Polynomial-related Fuzzy Controller
K. Tanaka, A Sum-of-Squares Framework for Fuzzy Systems Modeling and Control:Beyond Linear Matrix Inequalities, The University of Electro-Communications (UEC) , Tokyo, Japan
K. Tanaka, A Sum-of-Squares Framework for Fuzzy Systems Modeling and Control:Beyond Linear Matrix Inequalities, The University of Electro-Communications (UEC) , Tokyo, Japan
What is PFS Control?
Polynomial + fuzzy approach is most powerful.
70

T-S Fuzzy Model vs Polynomial Fuzzy Model
Takagi-Sugeno Fuzzy Model Polynomial Fuzzy Model
Linear Sector Nonlinear Sector
Linear Matrix Inequality (LMI) Sum of Squares (SOS)
A. Sala and C. Arino
Polynomial Fuzzy Models for Nonlinear Control:A Taylor Series Approach
IEEE TRANSACTIONS ON FUZZY SYSTEMS, VOL. 17, NO. 6, pp.1284-1295, 2009K. Tanaka, A Sum-of-Squares Framework for Fuzzy Systems Modeling and Control:Beyond Linear Matrix Inequalities, The University of Electro-Communications (UEC) , Tokyo, Japan
K. Tanaka, A Sum-of-Squares Framework for Fuzzy Systems Modeling and Control:Beyond Linear Matrix Inequalities, The University of Electro-Communications (UEC) , Tokyo, Japan
71

Polynomial Fuzzy Model
K. Tanaka, H. Yoshida, H. Ohtake and H. O. Wang,
A Sum of Squares Approach to Modeling and Control
of Nonlinear Dynamical Systems with Polynomial Fuzzy Systems,
IEEE Transactions on Fuzzy Systems, Vol.17, No.4, pp.911-922, August 2009.
r
i
ji
r
j
iji ttttththt1 1
)(ˆ))}(())(())(()){(())(()( xxFxBxAzzx
Design the local feedback gains such that
the closed-loop system is (globally asymptotically) stable
Sum of Squares
(SOS)
)(ˆ))(())(()(1
ttthtr
i
ii xxFzu
)}())(()(ˆ))(()){(()(1
tttttht i
r
i
ii uxBxxAzx
Polynomial-related Fuzzy Controller
SOS-based Design
K. Tanaka, A Sum-of-Squares Framework for Fuzzy Systems Modeling and Control:Beyond Linear Matrix Inequalities, The University of Electro-Communications (UEC) , Tokyo, Japan
K. Tanaka, A Sum-of-Squares Framework for Fuzzy Systems Modeling and Control:Beyond Linear Matrix Inequalities, The University of Electro-Communications (UEC) , Tokyo, Japan
72

Polynomial-related
Lyapunov Function
)(ˆ)())(~()(
)(ˆ
)(ˆ))(~()(ˆ)(ˆ))(~()(ˆ))((
1
1
11
ttxttx
t
tttttttV
n
k
k
k
T
TT
xxX
x
xxXxxxXxx
r
i
ji
r
j
iji ttttththt1 1
)(ˆ))}(())(())(()){(())(()( xxFxBxAzzx
)(ˆ))(~()(ˆ))(( ttttV T xxPxx
0xX
xP
))(~(
))(~(
1 t
t
))(~()(
))(~())(~()(
))(~(1
11
1 ttx
tttx
tkk
xX
xXxX
xX
)(ˆ
)(,))(())(( xxxxΤj
iijij
x
xTtTt
r
i
k
iik ttthtx1
)(ˆ))(())(()( xxAz
)(ˆ))(~()(ˆ tttT xxPx
SOS-based Design
K. Tanaka, A Sum-of-Squares Framework for Fuzzy Systems Modeling and Control:Beyond Linear Matrix Inequalities, The University of Electro-Communications (UEC) , Tokyo, Japan
K. Tanaka, A Sum-of-Squares Framework for Fuzzy Systems Modeling and Control:Beyond Linear Matrix Inequalities, The University of Electro-Communications (UEC) , Tokyo, Japan
73
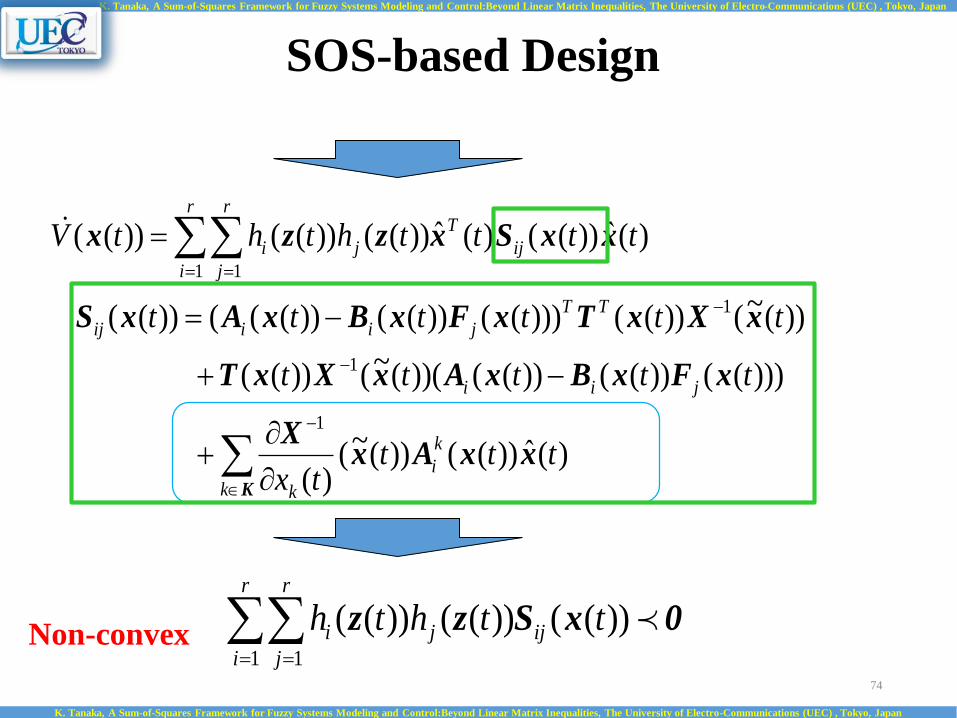
K
xxAxX
xFxBxAxXxT
xXxTxFxBxAxS
xxSxzzx
k
k
i
k
jii
TT
jiiij
ij
Tr
i
r
j
ji
ttttx
ttttt
tttttt
tttththtV
)(ˆ))(())(~()(
)))(())(())(())((~())((
))(~())(()))(())(())((())((
)(ˆ))(()(ˆ))(())(())((
1
1
1
1 1
0xSzz ))(())(())((1 1
tthth ij
r
i
r
j
ji
Non-convex
SOS-based Design
K. Tanaka, A Sum-of-Squares Framework for Fuzzy Systems Modeling and Control:Beyond Linear Matrix Inequalities, The University of Electro-Communications (UEC) , Tokyo, Japan
K. Tanaka, A Sum-of-Squares Framework for Fuzzy Systems Modeling and Control:Beyond Linear Matrix Inequalities, The University of Electro-Communications (UEC) , Tokyo, Japan
74

0xLzz ))((1 1
tthth ij
r
i
r
j
ji
0))(())((
0))((
tt
t
jiij
ii
xLxL
xL
Multiplying the inequality on the left and right by ))(~( txX
))(~())(())(~())(( tttt ijij xXxSxXxL Convex
0))(())((
0))((
tt
t
jiij
ii
xLxL
xL
or
SOS-based Design
K. Tanaka, A Sum-of-Squares Framework for Fuzzy Systems Modeling and Control:Beyond Linear Matrix Inequalities, The University of Electro-Communications (UEC) , Tokyo, Japan
K. Tanaka, A Sum-of-Squares Framework for Fuzzy Systems Modeling and Control:Beyond Linear Matrix Inequalities, The University of Electro-Communications (UEC) , Tokyo, Japan
75

SOSistttt
SOSistttt
jiij
T
ii
T
)())(())(()(
)())(())(()(
22
11
vxLxLv
vxxLv
))(( tx
0))(())((
0))((
tt
t
jiij
ii
xLxL
xL
K. Tanaka, H. Yoshida, H. Ohtake and H. O. Wang,
A Sum of Squares Approach to Modeling and Control
of Nonlinear Dynamical Systems with Polynomial Fuzzy Systems,
IEEE Transactions on Fuzzy Systems, Vol.17, No.4, pp.911-922, August 2009.
Convex SOS Condition
SOS-based Design
K. Tanaka, A Sum-of-Squares Framework for Fuzzy Systems Modeling and Control:Beyond Linear Matrix Inequalities, The University of Electro-Communications (UEC) , Tokyo, Japan
K. Tanaka, A Sum-of-Squares Framework for Fuzzy Systems Modeling and Control:Beyond Linear Matrix Inequalities, The University of Electro-Communications (UEC) , Tokyo, Japan
:positive definite polynomial

is a polynomial matrix whose (i, j)-th entry
is given by
0))(( tV x
0))(( tV x
SOS-based DesignConvex SOS Design Condition
K. Tanaka, A Sum-of-Squares Framework for Fuzzy Systems Modeling and Control:Beyond Linear Matrix Inequalities, The University of Electro-Communications (UEC) , Tokyo, Japan
K. Tanaka, A Sum-of-Squares Framework for Fuzzy Systems Modeling and Control:Beyond Linear Matrix Inequalities, The University of Electro-Communications (UEC) , Tokyo, Japan
If there exist a symmetric polynomial matrix and a polynomial matrix
satisfying the following SOS conditions, the polynomial fuzzy model
can be stabilized by the fuzzy controller.
Positive definite polynomial
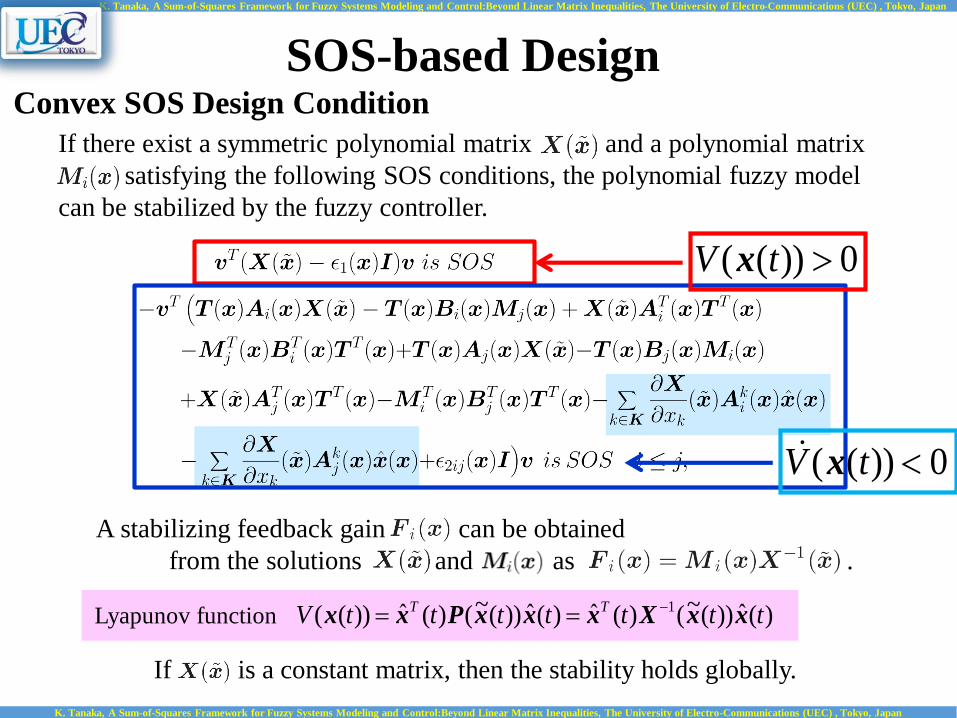
A stabilizing feedback gain can be obtained
from the solutions and as .
0))(( tV x
0))(( tV x
SOS-based DesignConvex SOS Design Condition
If is a constant matrix, then the stability holds globally.
Lyapunov function )(ˆ))(~()(ˆ)(ˆ))(~()(ˆ))(( 1 tttttttV TT xxXxxxPxx
K. Tanaka, A Sum-of-Squares Framework for Fuzzy Systems Modeling and Control:Beyond Linear Matrix Inequalities, The University of Electro-Communications (UEC) , Tokyo, Japan
K. Tanaka, A Sum-of-Squares Framework for Fuzzy Systems Modeling and Control:Beyond Linear Matrix Inequalities, The University of Electro-Communications (UEC) , Tokyo, Japan
If there exist a symmetric polynomial matrix and a polynomial matrix
satisfying the following SOS conditions, the polynomial fuzzy model
can be stabilized by the fuzzy controller.

• A variety of control theory problems can be expressed as SOS problems (SOSPs).
• If a problem is formulated in terms of SOS, then it can be solved by efficient convex optimization algorithms
(the “SOS solvers”).
• SOS solvers: SOSOPT, SOSTOOLS, etc
SOS solvers
SOS solvers
SOS is )( eCheck/solv xp
TTp QQxQzxzx , )(
SDP
solvers 0 eCheck/solv Q
SOS-based Design
How to Solve Convex SOS?
K. Tanaka, A Sum-of-Squares Framework for Fuzzy Systems Modeling and Control:Beyond Linear Matrix Inequalities, The University of Electro-Communications (UEC) , Tokyo, Japan
K. Tanaka, A Sum-of-Squares Framework for Fuzzy Systems Modeling and Control:Beyond Linear Matrix Inequalities, The University of Electro-Communications (UEC) , Tokyo, Japan
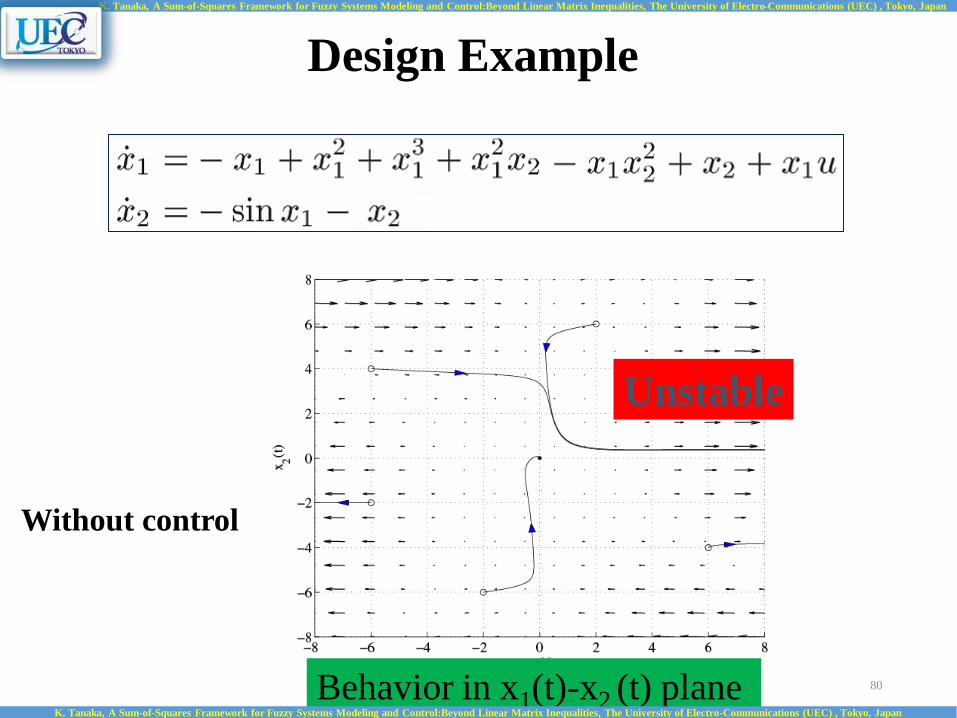
Without control
Unstable
Behavior in x1(t)-x2 (t) plane
Design Example
K. Tanaka, A Sum-of-Squares Framework for Fuzzy Systems Modeling and Control:Beyond Linear Matrix Inequalities, The University of Electro-Communications (UEC) , Tokyo, Japan
K. Tanaka, A Sum-of-Squares Framework for Fuzzy Systems Modeling and Control:Beyond Linear Matrix Inequalities, The University of Electro-Communications (UEC) , Tokyo, Japan
80

Takagi-Sugeno
fuzzy model
PDC fuzzy controller
8
8
We can NOT design a PDC fuzzy controller guaranteeing global stability by solving the existing LMI conditions
Design Example
K. Tanaka, A Sum-of-Squares Framework for Fuzzy Systems Modeling and Control:Beyond Linear Matrix Inequalities, The University of Electro-Communications (UEC) , Tokyo, Japan
K. Tanaka, A Sum-of-Squares Framework for Fuzzy Systems Modeling and Control:Beyond Linear Matrix Inequalities, The University of Electro-Communications (UEC) , Tokyo, Japan
81

Takagi-Sugeno
fuzzy model
PDC fuzzy controller
8
8
Polynomial fuzzy model
2
Polynomial-related fuzzy controller
Design Example
K. Tanaka, A Sum-of-Squares Framework for Fuzzy Systems Modeling and Control:Beyond Linear Matrix Inequalities, The University of Electro-Communications (UEC) , Tokyo, Japan
K. Tanaka, A Sum-of-Squares Framework for Fuzzy Systems Modeling and Control:Beyond Linear Matrix Inequalities, The University of Electro-Communications (UEC) , Tokyo, Japan
82
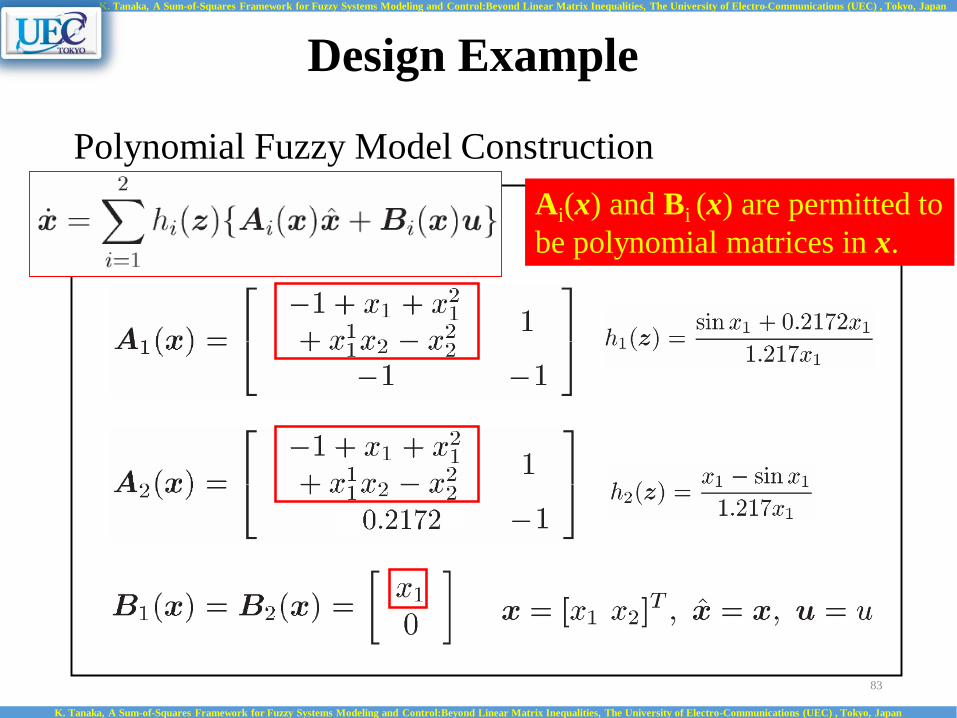
Polynomial Fuzzy Model Construction
Ai(x) and Bi (x) are permitted to
be polynomial matrices in x.
Design Example
K. Tanaka, A Sum-of-Squares Framework for Fuzzy Systems Modeling and Control:Beyond Linear Matrix Inequalities, The University of Electro-Communications (UEC) , Tokyo, Japan
K. Tanaka, A Sum-of-Squares Framework for Fuzzy Systems Modeling and Control:Beyond Linear Matrix Inequalities, The University of Electro-Communications (UEC) , Tokyo, Japan
83
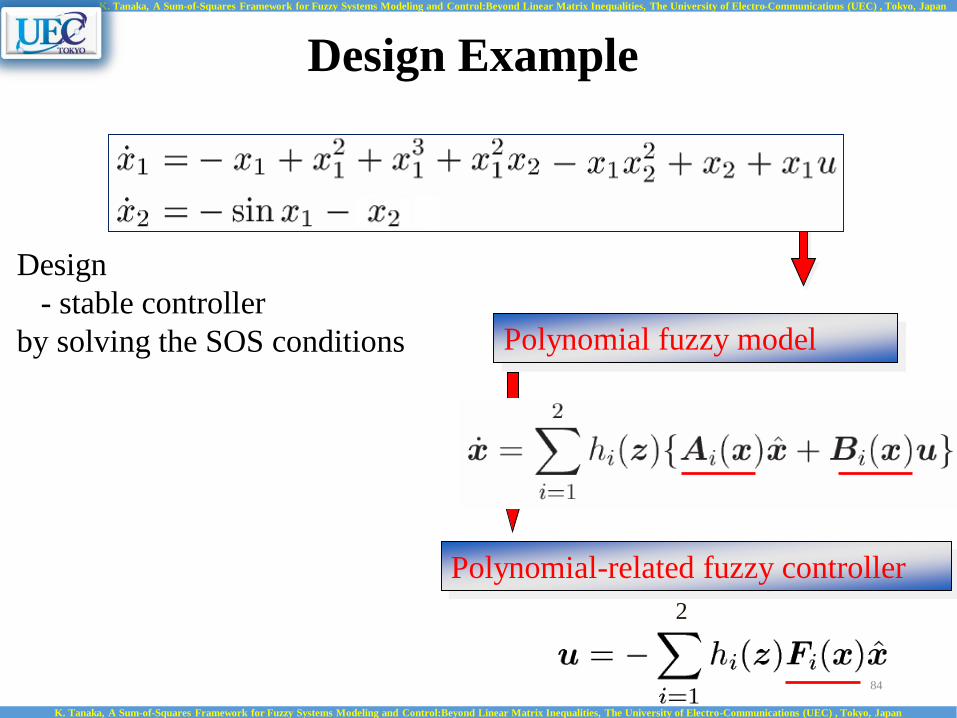
Design
- stable controller
by solving the SOS conditions Polynomial fuzzy model
2
Polynomial-related fuzzy controller
Design Example
K. Tanaka, A Sum-of-Squares Framework for Fuzzy Systems Modeling and Control:Beyond Linear Matrix Inequalities, The University of Electro-Communications (UEC) , Tokyo, Japan
K. Tanaka, A Sum-of-Squares Framework for Fuzzy Systems Modeling and Control:Beyond Linear Matrix Inequalities, The University of Electro-Communications (UEC) , Tokyo, Japan
84
Without control
Unstable
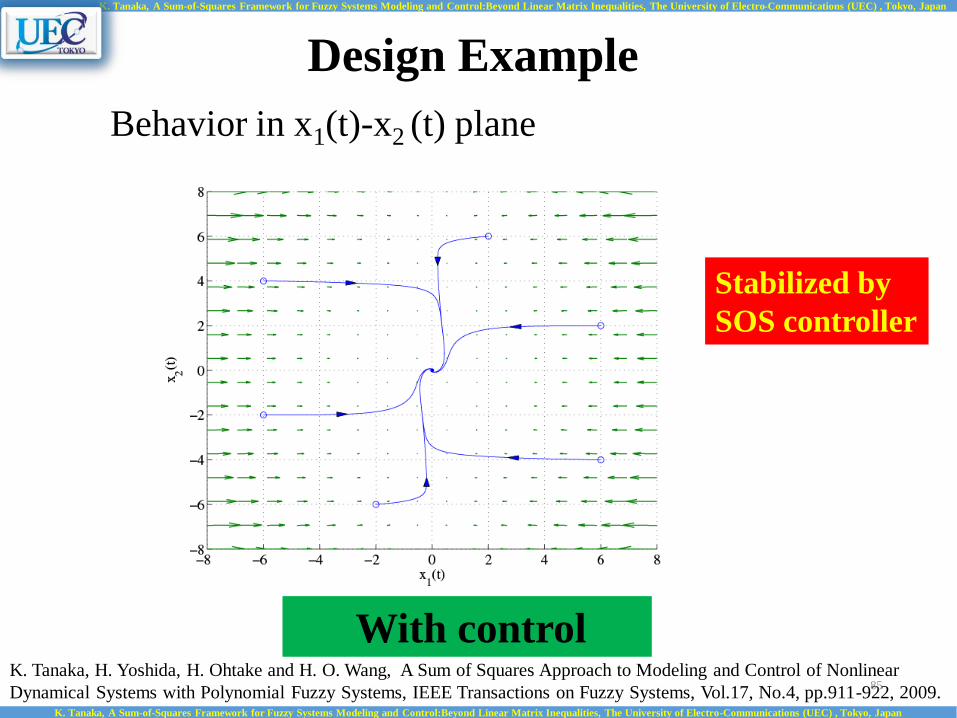
With control
Stabilized by
SOS controller
Behavior in x1(t)-x2 (t) plane
Design Example
K. Tanaka, H. Yoshida, H. Ohtake and H. O. Wang, A Sum of Squares Approach to Modeling and Control of Nonlinear
Dynamical Systems with Polynomial Fuzzy Systems, IEEE Transactions on Fuzzy Systems, Vol.17, No.4, pp.911-922, 2009.K. Tanaka, A Sum-of-Squares Framework for Fuzzy Systems Modeling and Control:Beyond Linear Matrix Inequalities, The University of Electro-Communications (UEC) , Tokyo, Japan
K. Tanaka, A Sum-of-Squares Framework for Fuzzy Systems Modeling and Control:Beyond Linear Matrix Inequalities, The University of Electro-Communications (UEC) , Tokyo, Japan
85
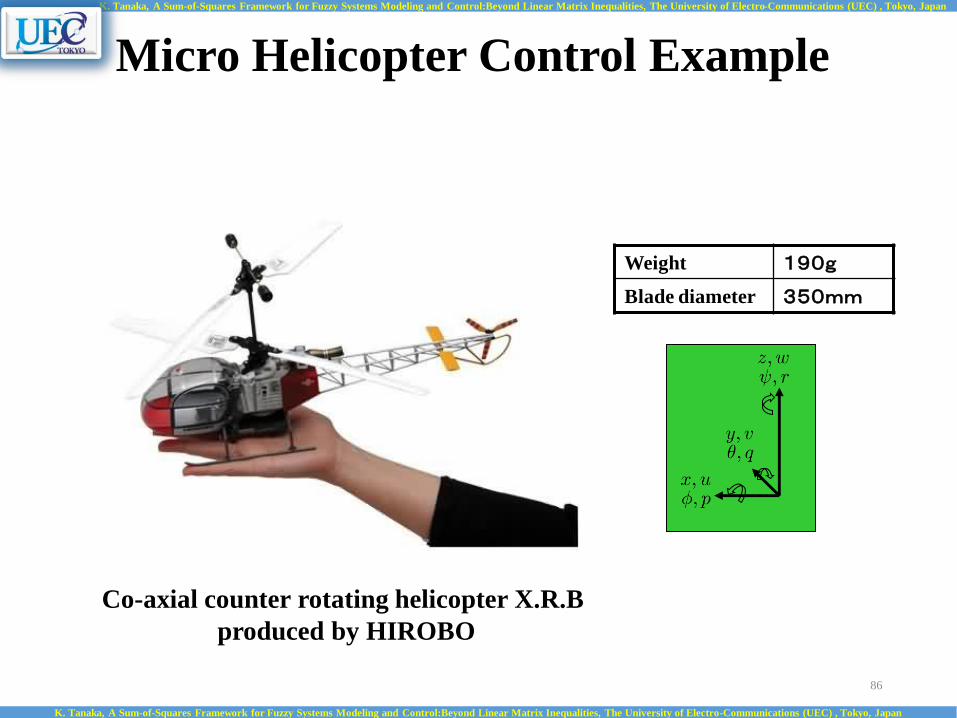
Weight 190g
Blade diameter 350mm
Co-axial counter rotating helicopter X.R.B
produced by HIROBO
Micro Helicopter Control Example
K. Tanaka, A Sum-of-Squares Framework for Fuzzy Systems Modeling and Control:Beyond Linear Matrix Inequalities, The University of Electro-Communications (UEC) , Tokyo, Japan
K. Tanaka, A Sum-of-Squares Framework for Fuzzy Systems Modeling and Control:Beyond Linear Matrix Inequalities, The University of Electro-Communications (UEC) , Tokyo, Japan
86

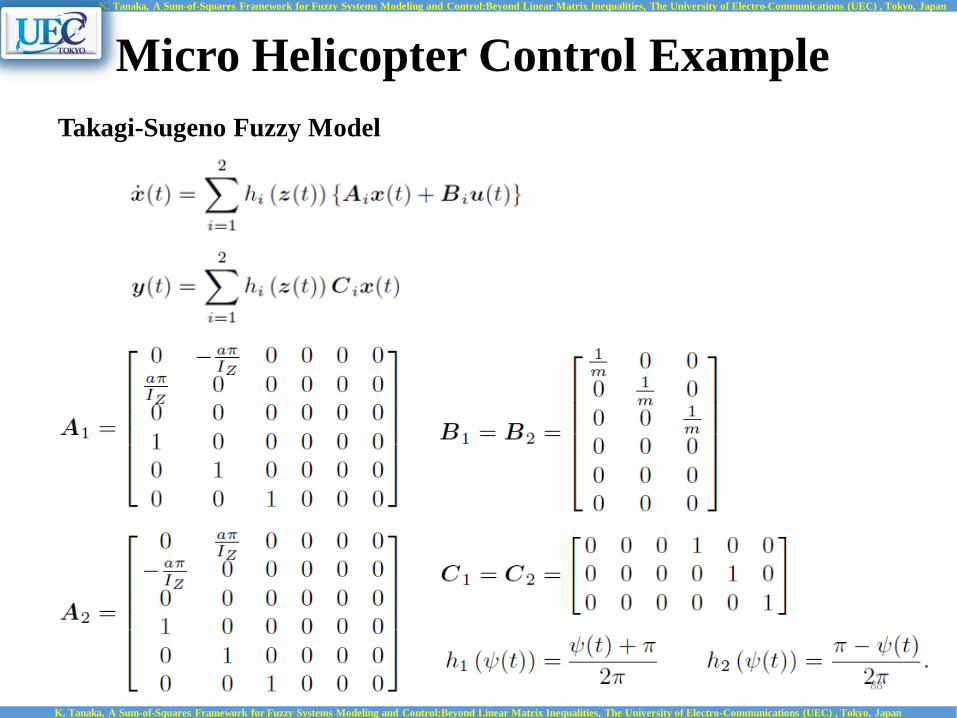
Micro Helicopter Control Example
Takagi-Sugeno Fuzzy Model
Micro Helicopter Dynamics
K. Tanaka, A Sum-of-Squares Framework for Fuzzy Systems Modeling and Control:Beyond Linear Matrix Inequalities, The University of Electro-Communications (UEC) , Tokyo, Japan
K. Tanaka, A Sum-of-Squares Framework for Fuzzy Systems Modeling and Control:Beyond Linear Matrix Inequalities, The University of Electro-Communications (UEC) , Tokyo, Japan
87
Micro Helicopter Control Example
K. Tanaka, A Sum-of-Squares Framework for Fuzzy Systems Modeling and Control:Beyond Linear Matrix Inequalities, The University of Electro-Communications (UEC) , Tokyo, Japan
K. Tanaka, A Sum-of-Squares Framework for Fuzzy Systems Modeling and Control:Beyond Linear Matrix Inequalities, The University of Electro-Communications (UEC) , Tokyo, Japan
Takagi-Sugeno Fuzzy Model
88

SOS controller
Guaranteed Cost Controller Design
LMI controller
Comparison of performance function values
Micro Helicopter Dynamics
(Takagi-Sugeno Fuzzy Model)
Kazuo Tanaka, Hiroshi Ohtake and Hua O. Wang,
Guaranteed Cost Control of Polynomial Fuzzy Systems via a Sum of Squares Approach,
IEEE Transactions on Systems, Man and Cybernetics Part B, Vol.39, No.2, pp.561-567 April, 2009.
Micro Helicopter Control Example
K. Tanaka, A Sum-of-Squares Framework for Fuzzy Systems Modeling and Control:Beyond Linear Matrix Inequalities, The University of Electro-Communications (UEC) , Tokyo, Japan
K. Tanaka, A Sum-of-Squares Framework for Fuzzy Systems Modeling and Control:Beyond Linear Matrix Inequalities, The University of Electro-Communications (UEC) , Tokyo, Japan
89
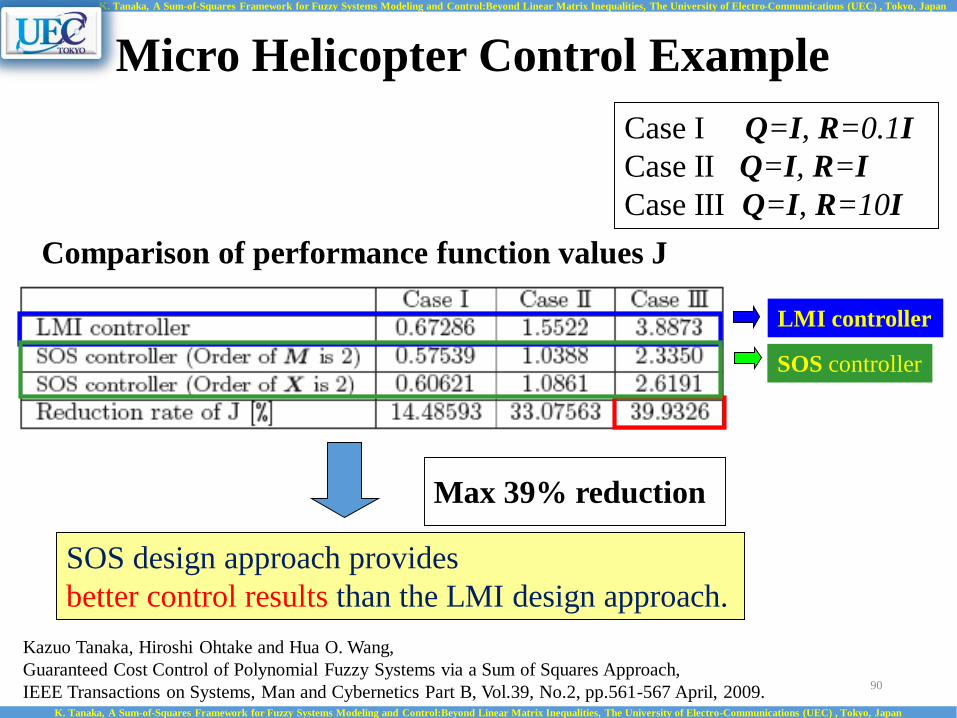
Comparison of performance function values J
SOS design approach provides
better control results than the LMI design approach.
Max 39% reduction
LMI controller
SOS controller
Case I Q=I, R=0.1I
Case II Q=I, R=I
Case III Q=I, R=10I
Kazuo Tanaka, Hiroshi Ohtake and Hua O. Wang,
Guaranteed Cost Control of Polynomial Fuzzy Systems via a Sum of Squares Approach,
IEEE Transactions on Systems, Man and Cybernetics Part B, Vol.39, No.2, pp.561-567 April, 2009.
Micro Helicopter Control Example
K. Tanaka, A Sum-of-Squares Framework for Fuzzy Systems Modeling and Control:Beyond Linear Matrix Inequalities, The University of Electro-Communications (UEC) , Tokyo, Japan
K. Tanaka, A Sum-of-Squares Framework for Fuzzy Systems Modeling and Control:Beyond Linear Matrix Inequalities, The University of Electro-Communications (UEC) , Tokyo, Japan
90
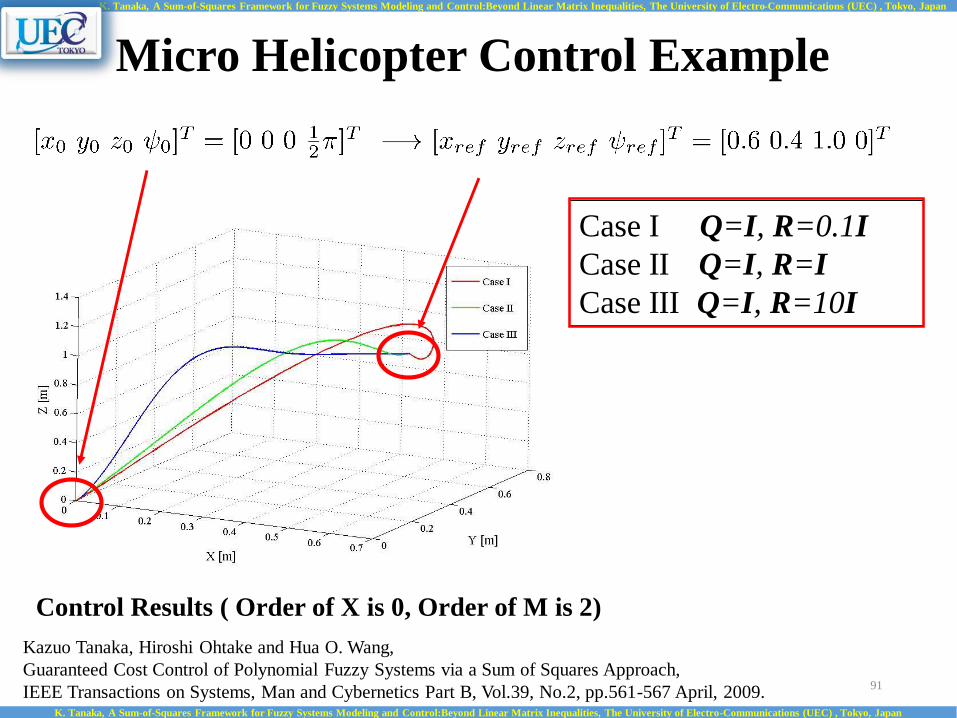
Control Results ( Order of X is 0, Order of M is 2)
Case I Q=I, R=0.1I
Case II Q=I, R=I
Case III Q=I, R=10I
Kazuo Tanaka, Hiroshi Ohtake and Hua O. Wang,
Guaranteed Cost Control of Polynomial Fuzzy Systems via a Sum of Squares Approach,
IEEE Transactions on Systems, Man and Cybernetics Part B, Vol.39, No.2, pp.561-567 April, 2009.
Micro Helicopter Control Example
K. Tanaka, A Sum-of-Squares Framework for Fuzzy Systems Modeling and Control:Beyond Linear Matrix Inequalities, The University of Electro-Communications (UEC) , Tokyo, Japan
K. Tanaka, A Sum-of-Squares Framework for Fuzzy Systems Modeling and Control:Beyond Linear Matrix Inequalities, The University of Electro-Communications (UEC) , Tokyo, Japan
91
Some recent topics in SOS-based design
will be presented in the tutorial.
Recent Topics
K. Tanaka, A Sum-of-Squares Framework for Fuzzy Systems Modeling and Control:Beyond Linear Matrix Inequalities, The University of Electro-Communications (UEC) , Tokyo, Japan
K. Tanaka, A Sum-of-Squares Framework for Fuzzy Systems Modeling and Control:Beyond Linear Matrix Inequalities, The University of Electro-Communications (UEC) , Tokyo, Japan
92

K. Tanaka, A Sum-of-Squares Framework for Fuzzy Systems Modeling and Control:Beyond Linear Matrix Inequalities, The University of Electro-Communications (UEC) , Tokyo, Japan
K. Tanaka, A Sum-of-Squares Framework for Fuzzy Systems Modeling and Control:Beyond Linear Matrix Inequalities, The University of Electro-Communications (UEC) , Tokyo, Japan
Conclusions

K. Tanaka, A Sum-of-Squares Framework for Fuzzy Systems Modeling and Control:Beyond Linear Matrix Inequalities, The University of Electro-Communications (UEC) , Tokyo, Japan
K. Tanaka, A Sum-of-Squares Framework for Fuzzy Systems Modeling and Control:Beyond Linear Matrix Inequalities, The University of Electro-Communications (UEC) , Tokyo, Japan
Conclusions
Nonlinearity Castle
(Nonlinear Systems
Control)
This road to nonlinearity castle (nonlinear systems control)
is generally hard due to the difficulties
- to understand nonlinear control theory
- to use it for real complex systems
K. Tanaka, A Sum-of-Squares Framework for Fuzzy Systems Modeling and Control:Beyond Linear Matrix Inequalities, The University of Electro-Communications (UEC) , Tokyo, Japan
K. Tanaka, A Sum-of-Squares Framework for Fuzzy Systems Modeling and Control:Beyond Linear Matrix Inequalities, The University of Electro-Communications (UEC) , Tokyo, Japan
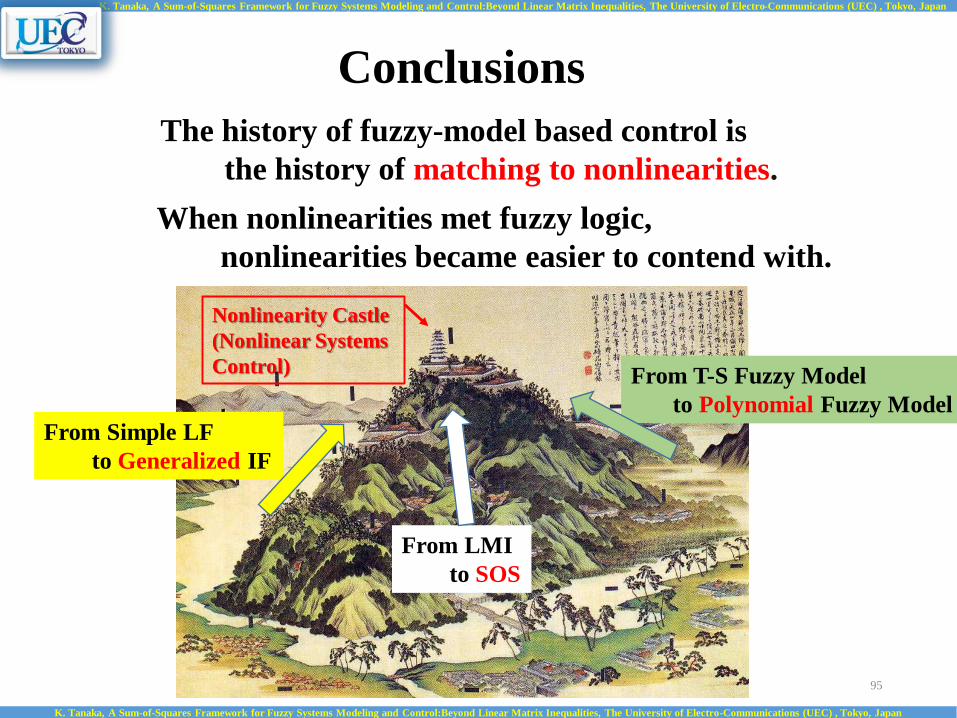
The history of fuzzy-model based control is
the history of matching to nonlinearities.
When nonlinearities met fuzzy logic,
nonlinearities became easier to contend with.
Conclusions
From LMI
to SOS
From T-S Fuzzy Model
to Polynomial Fuzzy Model
From Simple LF
to Generalized IF
Nonlinearity Castle
(Nonlinear Systems
Control)
95
K. Tanaka, A Sum-of-Squares Framework for Fuzzy Systems Modeling and Control:Beyond Linear Matrix Inequalities, The University of Electro-Communications (UEC) , Tokyo, Japan
K. Tanaka, A Sum-of-Squares Framework for Fuzzy Systems Modeling and Control:Beyond Linear Matrix Inequalities, The University of Electro-Communications (UEC) , Tokyo, Japan
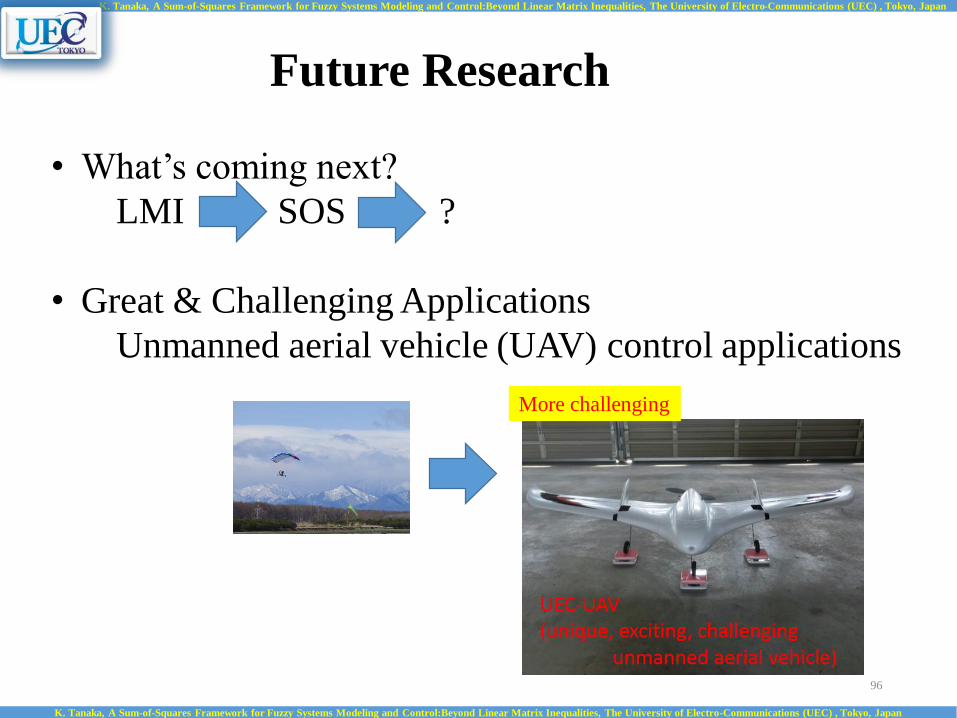
Future Research
• What’s coming next?
LMI SOS ?
• Great & Challenging Applications
Unmanned aerial vehicle (UAV) control applications
More challenging
96

• Fixed Delta-shaped wing
• Wingspan: 2000 mm
• Length: 862 mm
• Weight: 2.5kg
• Relatively high speed (70km/h max)
• Longer flying time (20 min. and more)
• Huge payload (approx. 2 kg)
K. Tanaka, A Sum-of-Squares Framework for Fuzzy Systems Modeling and Control:Beyond Linear Matrix Inequalities, The University of Electro-Communications (UEC) , Tokyo, Japan
K. Tanaka, A Sum-of-Squares Framework for Fuzzy Systems Modeling and Control:Beyond Linear Matrix Inequalities, The University of Electro-Communications (UEC) , Tokyo, Japan
UEC-UAV
(Unique, Exciting, Challenging UAV)

UEC-UAV
(Unique, Exciting, Challenging UAV)
K. Tanaka, A Sum-of-Squares Framework for Fuzzy Systems Modeling and Control:Beyond Linear Matrix Inequalities, The University of Electro-Communications (UEC) , Tokyo, Japan
Manual control by students.
Actually very tough to realize stable control by human.
K. Tanaka, A Sum-of-Squares Framework for Fuzzy Systems Modeling and Control:Beyond Linear Matrix Inequalities, The University of Electro-Communications (UEC) , Tokyo, Japan

Wireless module
(XBee)
Microcontroller
ESC(Electric Speed Controller)
GPS
R/C receiver
Li-Po batt.(11.1v/4000mAh×2)
Air speed sensor(Pitot tube)
K. Tanaka, A Sum-of-Squares Framework for Fuzzy Systems Modeling and Control:Beyond Linear Matrix Inequalities, The University of Electro-Communications (UEC) , Tokyo, Japan
K. Tanaka, A Sum-of-Squares Framework for Fuzzy Systems Modeling and Control:Beyond Linear Matrix Inequalities, The University of Electro-Communications (UEC) , Tokyo, Japan
UEC-UAV
(Unique, Exciting, Challenging UAV)

View from
UEC-UAV’s on-board high-definition cam
K. Tanaka, A Sum-of-Squares Framework for Fuzzy Systems Modeling and Control:Beyond Linear Matrix Inequalities, The University of Electro-Communications (UEC) , Tokyo, Japan
K. Tanaka, A Sum-of-Squares Framework for Fuzzy Systems Modeling and Control:Beyond Linear Matrix Inequalities, The University of Electro-Communications (UEC) , Tokyo, Japan
JAXA Taiki Aerospace Research Field
K. Tanaka, A Sum-of-Squares Framework for Fuzzy Systems Modeling and Control:Beyond Linear Matrix Inequalities, The University of Electro-Communications (UEC) , Tokyo, Japan
K. Tanaka, A Sum-of-Squares Framework for Fuzzy Systems Modeling and Control:Beyond Linear Matrix Inequalities, The University of Electro-Communications (UEC) , Tokyo, Japan
https://www.youtube.com/watch?v=z3m5ChL4Sx0
Future Research
Our UAV (UEC-UAV) Control (Video)

K. Tanaka, A Sum-of-Squares Framework for Fuzzy Systems Modeling and Control:Beyond Linear Matrix Inequalities, The University of Electro-Communications (UEC) , Tokyo, Japan
K. Tanaka, A Sum-of-Squares Framework for Fuzzy Systems Modeling and Control:Beyond Linear Matrix Inequalities, The University of Electro-Communications (UEC) , Tokyo, Japan
Kazuo Tanaka, A Sum-of-Squares Framework for Fuzzy Systems Modeling and Control- Beyond Linear Matrix Inequalities -, The University of Electro-Communications (UEC) , Tokyo, Japan
THE END
IEEE WCCI 2016 Tutorial (FUZZ-4), Vancouver, July 24, 2016 102
















