
A Study on the Sinkage and Trim of a Ship in Steady ...
8
浅水域を定常操縦運動する船の 船体沈下・トリムに関する基礎的研究 奥田 晃生 1 ・佐野 将昭 2 A Study on the Sinkage and Trim of a Ship in Steady Maneuvering Motion in Shallow Water Akio OKUDA and Masaaki SANO Abstract When sailing in shallow water, the special attention should be given to the sinkage and trim of a ship. In order to prevent her from grounding, the amount of them have to be estimated well and the water depth should be kept enough deep for safe navigation. From this reason, a lot of estimated formulas based on the experimental and numerical studies have been proposed until now. Although they have a big advantage in the practical view point, there seem to be no universal formulas which are applicable to any type of ships with qualitative accuracy. Besides, there is little information about the effect of maneuvering motion on the sinkage and trim despite there are many situations in which a ship passes a curve of a waterway or is drifted by tidal currents or river flow. In this study, the numerical analysis of the sinkage and trim of a ship in steady maneuvering motion in shallow water is made by using a free and open source CFD software. The amount of them is estimated with a variety of the hull drift angle, yaw rate and water depth. The pressure distributions on the hull are also shown for discussing the hydrodynamic mechanism. The bow squat in steady maneuvering motion is estimated finally. Such kind of information would be also important as well as that in running straight. Keywords : Sinkage, Trim, Shallow water, CFD キーワード:船体沈下,トリム,浅水影響, CFD 1 学生会員 広島大学大学院工学研究科 (〒739-8527 広島県東広島市鏡山 1-4-1)[email protected] 2 正会員 広島大学大学院工学研究院 (〒739-8527 広島県東広島市鏡山 1-4-1) [email protected] 1. 緒言 浅水域を航行する船が経験する船体沈下・トリム 変化は、触底を引き起こすばかりでなく、操縦性能 の低下を招く危険性から大きな注意を払われるべき 事象といえる。航行の安全性を確保するには、あら ゆる深喫水の船舶が航行できるに十分な水深を確保 すれば良い訳だが、浚渫作業の費用と労力の面から 容易な事ではない。2007 年に改訂された新しい航路 設計基準 1) を参照すると、対象船舶及び航行環境を 特定できない第 1 区分における航路水深は、静穏な 港内等の航路では喫水の 1.1 倍が基本値に定められ ている。これは旧基準を引き継いだ設定であり、想 定される船舶の性能等を十分に反映されたものとは 言い難い。一方で、それらを特定できる第 2 区分に おいては、船の主要目をパラメータとする簡易推定 式 2) により算定された船首沈下量に、運動影響や余 裕水深を加味した水深が必要とされる。実験や理論 を背景に導かれた簡易推定式には合理性があり、か つ現場ですぐに使える利便性を有する事から、実用 上、その目的を十分に達成していると思われるが、
Transcript of A Study on the Sinkage and Trim of a Ship in Steady ...

浅水域を定常操縦運動する船の
船体沈下・トリムに関する基礎的研究
奥田 晃生1・佐野 将昭2
A Study on the Sinkage and Trim of a Ship
in Steady Maneuvering Motion in Shallow Water
Akio OKUDA and Masaaki SANO
Abstract
When sailing in shallow water, the special attention should be given to the sinkage and trim of a ship. In order
to prevent her from grounding, the amount of them have to be estimated well and the water depth should be kept
enough deep for safe navigation. From this reason, a lot of estimated formulas based on the experimental and
numerical studies have been proposed until now. Although they have a big advantage in the practical view point,
there seem to be no universal formulas which are applicable to any type of ships with qualitative accuracy.
Besides, there is little information about the effect of maneuvering motion on the sinkage and trim despite there
are many situations in which a ship passes a curve of a waterway or is drifted by tidal currents or river flow.
In this study, the numerical analysis of the sinkage and trim of a ship in steady maneuvering motion in shallow
water is made by using a free and open source CFD software. The amount of them is estimated with a variety of
the hull drift angle, yaw rate and water depth. The pressure distributions on the hull are also shown for discussing
the hydrodynamic mechanism. The bow squat in steady maneuvering motion is estimated finally. Such kind of
information would be also important as well as that in running straight.
Keywords : Sinkage, Trim, Shallow water, CFD
キーワード:船体沈下,トリム,浅水影響, CFD
1 学生会員 広島大学大学院工学研究科 (〒739-8527 広島県東広島市鏡山 1-4-1)[email protected]
2 正会員 広島大学大学院工学研究院 (〒739-8527 広島県東広島市鏡山 1-4-1) [email protected]
1. 緒言
浅水域を航行する船が経験する船体沈下・トリム
変化は、触底を引き起こすばかりでなく、操縦性能
の低下を招く危険性から大きな注意を払われるべき
事象といえる。航行の安全性を確保するには、あら
ゆる深喫水の船舶が航行できるに十分な水深を確保
すれば良い訳だが、浚渫作業の費用と労力の面から
容易な事ではない。2007年に改訂された新しい航路
設計基準 1)を参照すると、対象船舶及び航行環境を
特定できない第 1区分における航路水深は、静穏な
港内等の航路では喫水の 1.1 倍が基本値に定められ
ている。これは旧基準を引き継いだ設定であり、想
定される船舶の性能等を十分に反映されたものとは
言い難い。一方で、それらを特定できる第 2区分に
おいては、船の主要目をパラメータとする簡易推定
式 2)により算定された船首沈下量に、運動影響や余
裕水深を加味した水深が必要とされる。実験や理論
を背景に導かれた簡易推定式には合理性があり、か
つ現場ですぐに使える利便性を有する事から、実用
上、その目的を十分に達成していると思われるが、
日本航海学会論文集 第132巻 第130回講演会にて講演
97
推定式によって推定値にバラつきがある点、いかな
る船種にも適用可能な万能性を望むことは難しいと
いう点は指摘できる。2001 年発表の野中の解説 3)4)
によると、今後 CFD 手法が有効な推定ツールになる
旨が記されており、実際、正確な船体没水形状を考
慮し、船周りの粘性流場を数分、数十分という計算
時間で解く事ができれば、多くの有用な知見が得ら
れる事が期待される。そして現在の計算機性能の著
しい発達を考慮すれば、それは十分に実現可能な試
みとなりつつある。
そこで本研究では、オープンソース CFD コードを
使用して船体沈下量やトリムの推定を試みる。特に
操縦運動時に焦点を当て、直進時と比較して、それ
らの諸量がどれ程変化をするのか、またその背景に
ある流体力学的なメカニズムについて考察する。現
実の航路には屈曲部があり、潮流や河川流によって
流される状況もある事から、旋回時や斜航時の影響
を把握しておく事は、航行の安全性を検討する上で
一つの知見になると思われる。
類似の研究に、Martin et al.の理論・実験的研
究 5)、湯室の ESSO OSAKA を対象とした実験的研究 6)
が挙げられるが、流場や詳細な船体表面圧力分布を
示して検討した例は無い。そこで本研究では、CFD
が強みを発揮する可視化結果を踏まえて考察を行う。
2. オープンソース CFDの概要 2.1 OpenFOAMについて
OpenFOAM7)と呼ばれるオープンソース CFD ツール
を使用する。これは OpenFOAM 社が開発しているフリ
ーの流体解析ソルバー集であり、市販の解析ソフト
と遜色ない機能があるとされる。ユーザーが自由に
ソルバーをカスタマイズ可能な点、定期的にアップ
グレードされる点、格子生成と可視化の両機能も同
時に提供される点も魅力の一つである。近年、船舶
海洋工学の分野においても、本ツールを活用した研
究成果 8)が報告されつつある。本研究では、有限体
積法による非圧縮性・乱流の定常状態ソルバーを、
定常操縦運動する、言い換えると斜航・旋回運動す
る船体周りの流場に適用した。
2.2 支配方程式
和泉等 9)の取扱いと同じく、船体固定座標系の
Navier-Stokes 方程式を考える。これは空間固定座
標系で定義される同方程式に、船体運動による慣性
力項を体積力として付加する事で得られる。
fVpDt
VD
21
(1)
ここで左辺は、流体粒子の速度ベクトルVの実質
微分を意味し、右辺第 1、2項が圧力勾配項と粘性項
である。第 3 項の慣性力項は、次式で定義できる。
)(2 rVf
(2)
ここで右辺第 1項から順に、コリオリ力、遠心力
を表している。 r は流体の位置ベクトル、 が渦度
ベクトルであり、船の旋回角速度に相当する。
また船体固定座標系で船体周囲の流場を表現す
る為、流速の流入境界条件として次式を考える。
0rVV S
(3)
式中、 sVは船速ベクトルを、 0r は流入境界の位置
ベクトルを意味する。
3. 船体流体力の推定精度の検証 まず本 CFD コードによる船体操縦流体力の推定精
度を検証する。深水域ならびに浅水域での CMT 試験
を再現し、実験結果との比較を行う。
3.1 供試船および計算条件
KVLCC2 船型を対象とする。本船は、V 型船尾を有
する最近の 30 万 t タンカー船型であり、研究用のベ
ンチマーク船として知られている。実船相当の主要
目を Table 1 に、解析に用いた主船体モデルを Fig.1
に示す。主要目等の記号は、一般的な表記に従うも
のとする。なお舵とプロペラは今回考慮していない。
Table 1 Principal dimensions of KVLCC2
L pp (m) 320 C b 0.8098
B (m) 58.0 x G /L pp 0.0347
d (m) 20.8 A w (m2) 16726
Volume (ton) 312622
Fig.1 The computation model of KVLCC2
日本航海学会論文集 第132巻 第130回講演会にて講演
98
日本航海学会論文集 第132巻 第130回講演会にて講演
99
計算条件について述べる。全ての計算は縮尺
1/110 の模型スケール(Lpp=2.9091m)で実施した。
浅水域での低速航行を想定し、造波影響は小さいと
みなして船体は 2重模型として取り扱った。計算メ
ッシュは、まず領域全体を 6 面体構造格子で分割し、
それを細分化して船体形状に適合させる事で生成し
た。総セル数は、水深にも依るがおおよそ 300 万程
度である。乱流モデルとして Spalart -Allamaras
モデルを適用した。また移流項は風上差分で離散化
し、数値計算の安定化を図った。
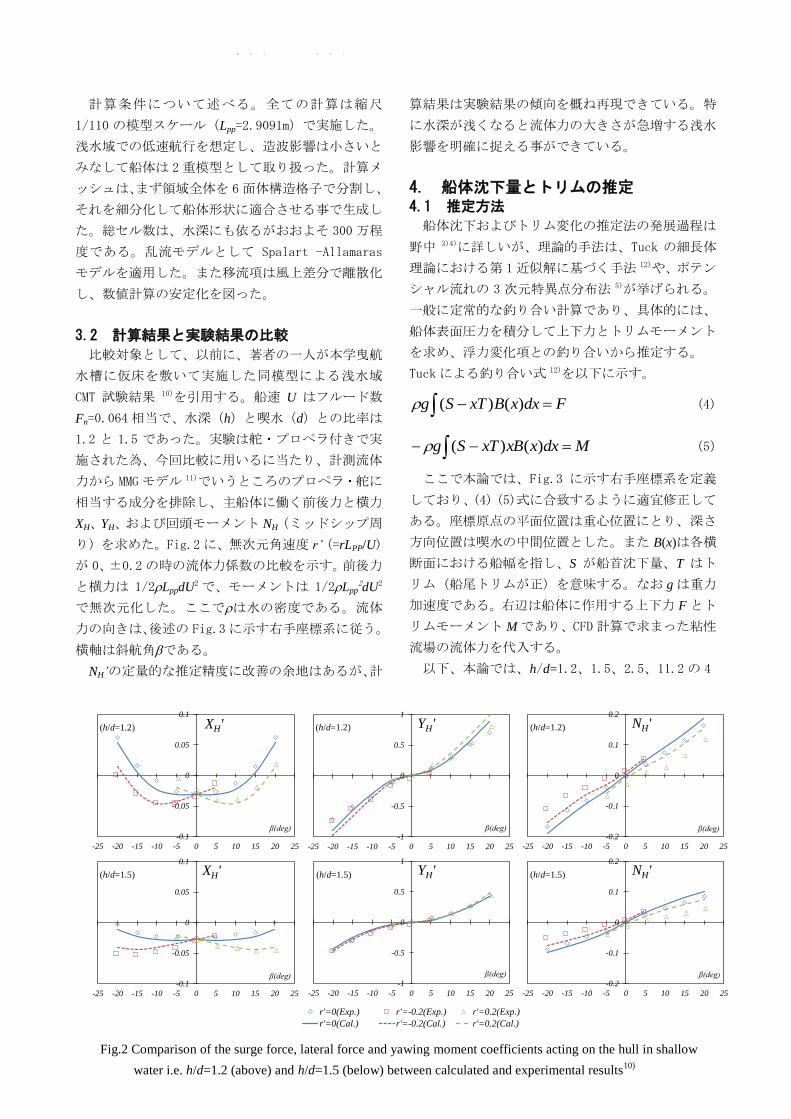
3.2 計算結果と実験結果の比較
比較対象として、以前に、著者の一人が本学曳航
水槽に仮床を敷いて実施した同模型による浅水域
CMT 試験結果 10)を引用する。船速 U はフルード数
Fn=0.064 相当で、水深(h)と喫水(d)との比率は
1.2 と 1.5 であった。実験は舵・プロペラ付きで実
施された為、今回比較に用いるに当たり、計測流体
力から MMG モデル 11)でいうところのプロペラ・舵に
相当する成分を排除し、主船体に働く前後力と横力
XH、YH、および回頭モーメント NH(ミッドシップ周
り)を求めた。Fig.2 に、無次元角速度 r’ (=rLPP/U)
が 0、±0.2 の時の流体力係数の比較を示す。前後力
と横力は 1/2LppdU2 で、モーメントは 1/2Lpp2dU2
で無次元化した。ここでは水の密度である。流体
力の向きは、後述の Fig.3 に示す右手座標系に従う。
横軸は斜航角である。
NH’の定量的な推定精度に改善の余地はあるが、計
算結果は実験結果の傾向を概ね再現できている。特
に水深が浅くなると流体力の大きさが急増する浅水
影響を明確に捉える事ができている。
4. 船体沈下量とトリムの推定 4.1 推定方法
船体沈下およびトリム変化の推定法の発展過程は
野中 3)4)に詳しいが、理論的手法は、Tuck の細長体
理論における第 1 近似解に基づく手法 12)や、ポテン
シャル流れの 3 次元特異点分布法 5)が挙げられる。
一般に定常的な釣り合い計算であり、具体的には、
船体表面圧力を積分して上下力とトリムモーメント
を求め、浮力変化項との釣り合いから推定する。
Tuck による釣り合い式 12)を以下に示す。
FdxxBxTSg )()( (4)
MdxxxBxTSg )()( (5)
ここで本論では、Fig.3 に示す右手座標系を定義
しており、(4) (5)式に合致するように適宜修正して
ある。座標原点の平面位置は重心位置にとり、深さ
方向位置は喫水の中間位置とした。また B(x)は各横
断面における船幅を指し、S が船首沈下量、T はト
リム(船尾トリムが正)を意味する。なお g は重力
加速度である。右辺は船体に作用する上下力 F とト
リムモーメント M であり、CFD 計算で求まった粘性
流場の流体力を代入する。
以下、本論では、h/d=1.2、1.5、2.5、11.2 の 4
Fig.2 Comparison of the surge force, lateral force and yawing moment coefficients acting on the hull in shallow
water i.e. h/d=1.2 (above) and h/d=1.5 (below) between calculated and experimental results10)
-0.2
-0.1
0
0.1
0.2
-20 -10 0 10 20
N'
r'=0(Exp.) r'=-0.2(Exp.) r'=0.2(Exp.)
r'=0(Cal.) r'=-0.2(Cal.) r'=0.2(Cal.)
-0.1
-0.05
0
0.05
0.1
-25 -20 -15 -10 -5 0 5 10 15 20 25
β(deg)
XH'
-1
-0.5
0
0.5
1
-25 -20 -15 -10 -5 0 5 10 15 20 25
β(deg)
YH'
-0.2
-0.1
0
0.1
0.2
-25 -20 -15 -10 -5 0 5 10 15 20 25
β(deg)
NH'
-0.1
-0.05
0
0.05
0.1
-25 -20 -15 -10 -5 0 5 10 15 20 25
β(deg)
XH'
-1
-0.5
0
0.5
1
-25 -20 -15 -10 -5 0 5 10 15 20 25
β(deg)
YH'
-0.2
-0.1
0
0.1
0.2
-25 -20 -15 -10 -5 0 5 10 15 20 25
β(deg)
NH'
(h/d=1.2)
(h/d=1.2)
(h/d=1.2)
(h/d=1.5)
(h/d=1.5)
(h/d=1.5)

日本航海学会論文集 第132巻 第130回講演会にて講演
100
つの水深域を Fn=0.064 で航行する状況下で計算を
行った。推定結果は、次式で定義される水深に基づ
くフルード数 Fnh を横軸に取りプロットした。
ghUFnh / (6)
ここで上記水深群は、それぞれ Fnh=0.23、0.21、
0.16、0.075 に相当する。今回は船速一定な為、Fnh
の増加と水深の減少は同義となる。
4.2 直進状態における推定結果の検証
まず直進状態における KVLCC2 の船体沈下量(重
心位置)およびトリムの推定を行った。先に示した
実験は別目的で実施しており、それらの諸量は未計
測であった。そこで比較対象として、湯室 6)により
計測された ESSO OSAKA の値と比較する。同船は船尾
形状に違いはあるが、Lpp=325(m)、Cb=0.83 と、今回
の供試船と類似の主要目を持つ。なお湯室の結果は、
A.P と F.P 位置での船首尾沈下量として与えられて
おり、著者等で重心位置での船体沈下量とトリムを
算出した。比較結果を Fig.4 に示す。
船型が異なる為に厳密な比較はできないが、Fnh
の増加(水深の減少)に伴う船体沈下量とトリムの
変化について、ほぼ類似の増加傾向が得られている。
4.3 斜航状態における検討
4.3.1 推定結果
通常、浅水域における操縦運動時には減衰力が大
きく作用する事から、舵角にも依るが船の斜航角は
大きく発達しない。しかし外乱下や狭水路を航行中
あるいは港湾内のタグ操船時など、ある程度大きな
横方向速度を伴う運動状態になる事もある。この為、
基礎的検討の段階では、幅広い斜航角で調査して
おく事も必要と考え、本研究では最大斜航角を 20°
に設定した。Fig.5 に、重心位置における船体沈下
量とトリムの計算結果を示す。
同図より、いずれの Fnh(水深)においても、斜
航時には船体沈下量と船首トリムが共に増加する事
が分かる。特に Fnh が大きい(水深が浅い)ほどそ
の傾向は顕著に見られる。例えば、Fnh= 0.23
(h/d=1.2)の状況下を=10°で斜航する場合、直
進時と比較して船体沈下量は 64%、船首トリムは 63%
増加し、斜航角が増すと、その割合はさらに大きく
なる事が分かる。おおよそ Fnh=0.2 以上の状況下で
は、船体沈下と船首トリムに及ぼす斜航影響がより
顕著に表れ、注意が必要と思われる。
FP AP
x
z
G
h
y
Fig.3 Coordinate system
0
0.05
0.1
0 0.05 0.1 0.15 0.2 0.25
Fnh
S/Lpp(%)
Exp.(ESSO OSAKA)
Cal.
6)
-0.1
-0.05
0
0 0.05 0.1 0.15 0.2 0.25
Fnh
T/Lpp(%)
Exp.(ESSO OSAKA)
Cal.
6)
Fig.4 Validation of the amount of sinkage and trim in
straight running
0
0.1
0.2
0.3
0 0.05 0.1 0.15 0.2 0.25
Fnh
S/Lpp(%)
0deg 5deg
10deg 15deg
20deg
-0.4
-0.3
-0.2
-0.1
0
0 0.05 0.1 0.15 0.2 0.25
Fnh
T/Lpp(%)
0deg 5deg
10deg 15deg
20deg
Fig.5 Calculated results of the amount of sinkage and
trim in oblique towing condition (r’=0)

CP
4.3.2 上下力分布
以上の背景を、船体の上下力分布に基づき考察す
る。単位長さあたりの船体に作用する上下力の無次
元値 ΔZ’(下向き正)を船長方向に積分する事で、
船体に作用する上下力の無次元値 Z’を計算できる。
その関係を式で表すと次のようになる。
dxdUρ
ZΔpn
LdxZΔ
LZ z
pppp2
21
11 (7)
ここで p は流体による圧力、nz は船体表面の外向
き法線の z 方向成分を意味する。Fig.6 に各水深に
おける ΔZ’を比較する。
斜航角が増すほど上下力分布曲線と x 軸に囲まれ
る面積が広がっており、直進状態よりも大きな下向
きの力が作用する事が分かる。この斜航影響は Fnh
が大きくなる(水深が浅くなる)ほど顕著であり、
浅水域で斜航した場合に、より大きな船体沈下が引
き起こされる様子がうかがえる。
続いて上下力分布曲線の形状に着目すると、船首
尾に近い断面位置で ΔZ’がピークを持つ点は共通し
ている。しかし直進状態では両極値に大きな差が見
られないのに対し、浅水域で斜航する場合、船首側
の極値が大きくなっており、ミッドシップを挟んで
上下力分布の前後非対称性が強くなる事が分かる。
この為、大きな船首トリムが誘起される事が分かる。
4.3.3 船体表面圧力と船体周囲流場
Fig.7 に、直進状態(=0°)と=15°の船体表面
圧力係数(Cp=p/(1/2U2))のコンター図を比較す
る。併せて Fig.8 に、Fnh=0.23(h/d=1.2)における
船体周囲の流線図を描画する。流線は、流速・船速
比率で色付けされている。これらの図は船底から見
た図となっている。
まず直進状態に着目すると、Fnh の増大(水深の減
少)に伴い船底全面にわたり負圧域が強まっている。
Fig.8 の流線図からも確認できるが、水底によって
制約を受けて船体周りの流れが増速した事が理由で
ある。また船首尾のビルジ部では、流れの剥離に伴
う強い負圧域が見られた。これが先に示した上下力
分布曲線の船首尾両端付近にピークが現れた事の背
景にあることがわかる。
次に斜航状態に焦点を当てると、いずれの Fnh に
おいても、直進時と比較して船底の負圧域が強まる
様子を確認できる。特に Fnh =0.23(h/d=1.2)の浅
-1
0
1
2
3
4
5
x/Lpp
ΔZ'
A.P. F.P.
Fnh=0.075(h/d=11.2)
-1
0
1
2
3
4
5
x/Lpp
ΔZ'
A.P. F.P.
Fnh=0.21(h/d=1.5)
-1
0
1
2
3
4
5
x/Lpp
ΔZ'
0° 10° 15° 20°
A.P. F.P.
Fnh=0.23(h/d=1.2)
Fig.6 Distribution of Z’ in the longitudinal direction of
the hull in oblique towing condition (r’=0)
Fnh=0.075 (h/d =11.2)
Fnh=0.21 (h/d =1.5)
Fnh=0.23 (h/d =1.2)
Fig.7 Distribution of the pressure coefficient on the hull
surface in oblique towing condition (r’=0)
(=0°)
(=15°)
(=0°)
(=15°)
(=15°)
(=0°)
日本航海学会論文集 第132巻 第130回講演会にて講演
101

日本航海学会論文集 第132巻 第130回講演会にて講演
102
|V |/U
Fig.8 Stream lines with |V |/U contours around the hull
in the case of =0o and 15
o (r’=0, Fnh=0.23)
水域においてその傾向は顕著であり、詳細に眺める
と、正面側の船首ビルジには船底に潜り込む流れに
よる強い負圧域が生じており、また背面側の船底付
近にも船側前肩部からの剥離によると思われる負圧
域を確認できる。この事は、Fig.8 に示す流線模様
からも理解される。一方、船尾ビルジには、縦渦を
主体とする船尾渦に関係した負圧域が現れているが、
その強さは、前部船体ほどではない。この為、前項
で示したような前後非対称な上下力分布となり、大
きな船首トリムの要因になる事が分かる。
4.4 旋回状態における検討
4.4.1 推定結果
引き続き旋回状態において検討を行った。旋回角
速度の無次元値 r’の最大値を 1.0 とし、いわゆる
pure yawing での重心位置における船体沈下量とト
リムの推定結果を Fig.9 に示す。
まず船体沈下量は、Fnh に対して 2 次関数的に増加
するが、r’=0.2 程度までの旋回状態であれば、直進
時と大差はない。それ以上の旋回角速度になると、
その大きさに比例して大きな船体沈下が起こる様子
が見られる。
一方、トリムは r’=0.5 付近を境に Fnhに対する増
減傾向に特徴的な変化が見られた。それ以下の小さ
な旋回時には、Fnh の増加(水深の減少)に伴い船首
トリム(t<0)が単調増加するが、r’=0.5 以上の大き
な旋回時には、船首トリムが減少し、船尾トリムに
転じている。本船の場合、Fnh=0.2 以上相当の船速
もしくは浅水域で旋回運動する場合に、そうした現
象が起こる事がうかがえる。なお同様のトリムの逆
転現象は、湯室の ESSO OSAKA による模型実験結果6)でも報告されている。
-0.1
0
0.1
0 0.05 0.1 0.15 0.2 0.25
Fnh
T/Lpp(%)
r'=0 r'=0.2
r'=0.4 r'=0.6
r'=0.8 r'=1.0
0
0.1
0.2
0 0.05 0.1 0.15 0.2 0.25
Fnh
S/Lpp(%)
r'=0 r'=0.2
r'=0.4 r'=0.6
r'=0.8 r'=1.0
Fig.9 Calculated results of the amount of sinkage and
trim in pure yawing condition (=0o)
4.4.2 上下力分布
Fig.10 に、旋回状態における上下力無次元値の船
長方向分布を示す。
Fnh が大きくなるに連れて、z 方向下向き流体力の
増加と共に、旋回角速度に応じた上下力分布に大き
な変化が現れている。特に大きな旋回時ほど、上下
力分布の形状変化が激しい。Fnh=0.23(h/d=1.2)の
浅水域に着目すると、前項の Fig.9の結果から予想
される通り、直進時と r’=0.2 の上下力分布に大差は
なく、ΔZ’は船首側に僅かながら大きな極値を持つ。
一方、旋回角速度の増加に伴い船尾側に顕著な下向
き流体力が誘起される様子が見られ、結果的にトリ
ムモーメントの向きが逆転し、船首トリムから船尾
トリムに転じる背景がうかがえる。
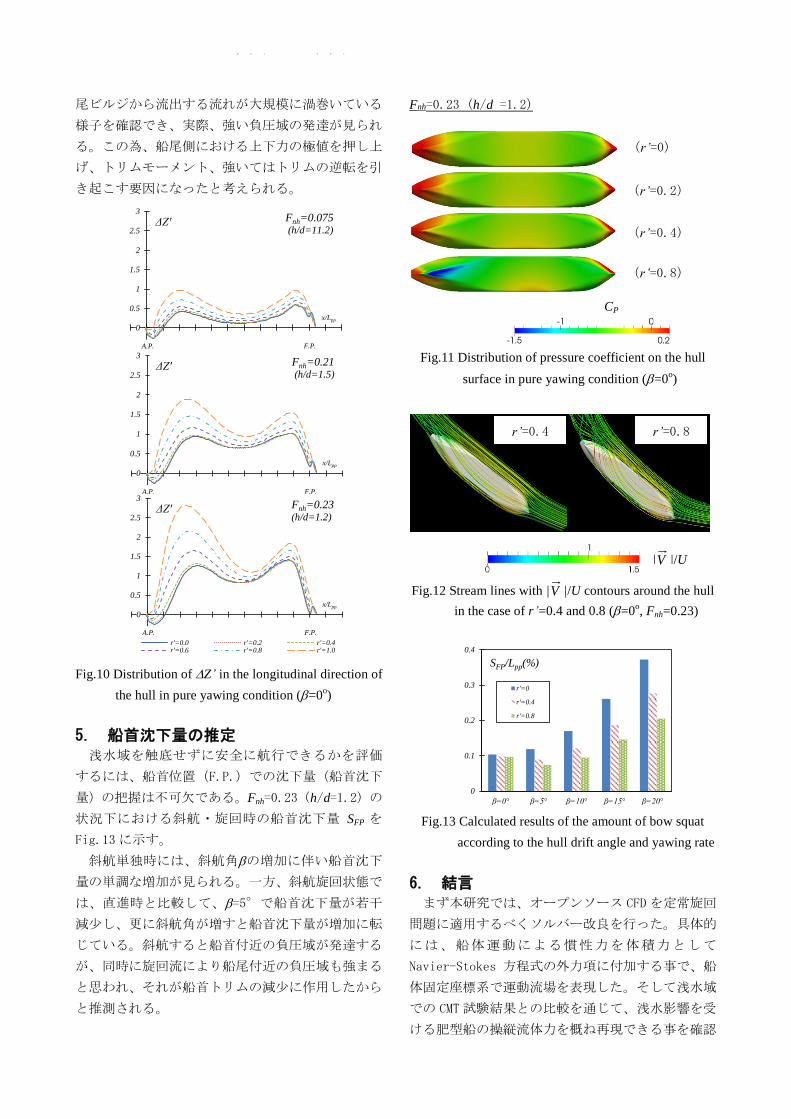
4.4.3 船体表面圧力と船体周囲流場
Fig.11 に、Fnh=0.23(h/d=1.2)の航走状態につ
いて、4 つの旋回状態における船体表面圧力係数の
コンター図を示す。また Fig.12 には、r’=0.4 と
r’=0.8の旋回状態について船体周囲の流線図を描画
する。
旋回状態では、船体前半部と後半部のそれぞれに
船体を横断する cross flow が流入する。r’=0.4 程
度の旋回強さであれば、船首尾の両ビルジでの剥離
渦に起因する負圧域は同程度である様子が分かる。
一方 r’=0.8 の旋回時には、流線図からも右舷側の船
=0°
=15°
|V |/U
尾ビルジから流出する流れが大規模に渦巻いている
様子を確認でき、実際、強い負圧域の発達が見られ
る。この為、船尾側における上下力の極値を押し上
げ、トリムモーメント、強いてはトリムの逆転を引
き起こす要因になったと考えられる。
-0.5
0
0.5
1
1.5
2
2.5
3
x/Lpp
ΔZ'
A.P. F.P.
Fnh=0.075(h/d=11.2)
-0.5
0
0.5
1
1.5
2
2.5
3
x/Lpp
ΔZ'
A.P. F.P.
Fnh=0.21(h/d=1.5)
-0.5
0
0.5
1
1.5
2
2.5
3
x/Lpp
ΔZ'
r'=0.0 r'=0.2 r'=0.4r'=0.6 r'=0.8 r'=1.0
A.P. F.P.
Fnh=0.23(h/d=1.2)
Fig.10 Distribution of Z’ in the longitudinal direction of
the hull in pure yawing condition (=0o)
5. 船首沈下量の推定 浅水域を触底せずに安全に航行できるかを評価
するには、船首位置(F.P.)での沈下量(船首沈下
量)の把握は不可欠である。Fnh=0.23(h/d=1.2)の
状況下における斜航・旋回時の船首沈下量 SFP を
Fig.13 に示す。
斜航単独時には、斜航角の増加に伴い船首沈下
量の単調な増加が見られる。一方、斜航旋回状態で
は、直進時と比較して、=5°で船首沈下量が若干
減少し、更に斜航角が増すと船首沈下量が増加に転
じている。斜航すると船首付近の負圧域が発達する
が、同時に旋回流により船尾付近の負圧域も強まる
と思われ、それが船首トリムの減少に作用したから
と推測される。
Fnh=0.23 (h/d =1.2)
Fig.11 Distribution of pressure coefficient on the hull
surface in pure yawing condition (=0o)
Fig.12 Stream lines with |V |/U contours around the hull
in the case of r’=0.4 and 0.8 (=0o, Fnh=0.23)
0
0.1
0.2
0.3
0.4
β=0� β=5� β=10� β=15� β=20�
SFP/Lpp(%)
r'=0
r'=0.4
r'=0.8
Fig.13 Calculated results of the amount of bow squat
according to the hull drift angle and yawing rate
6. 結言 まず本研究では、オープンソース CFD を定常旋回
問題に適用するべくソルバー改良を行った。具体的
には、船体運動による慣性力を体積力として
Navier-Stokes 方程式の外力項に付加する事で、船
体固定座標系で運動流場を表現した。そして浅水域
での CMT試験結果との比較を通じて、浅水影響を受
ける肥型船の操縦流体力を概ね再現できる事を確認
r’=0.4 r’=0.8
CP
(r’=0.8)
(r’=0.4)
(r’=0.2)
(r’=0)
r’=0.4
r’=0.8
日本航海学会論文集 第132巻 第130回講演会にて講演
103

した。
続いて斜航・旋回時における船体沈下量、トリム
の推定を行い、流場・圧力場の可視化を通じて、そ
の発生メカニズムを考察した。大きな運動状態では、
船首尾のビルジ付近から剥離した渦の影響により、
船底の圧力分布が大きく変化する様子を示した。船
速・運動状態にもよるが、浅水域を安全に航行する
上で、直進状態よりも余裕水深が減少する恐れがあ
る点は、注意を払う必要があると思われる。
課題点としては、CFD 手法による計算精度の向上
が挙げられる。数値計算の安定性には留意すべきで
あるが、高次精度の差分スキームの適用も一つの選
択肢である。また今回は、同問題への標準的な取り
組み法の一つである定常釣り合い計算より、船体沈
下量・トリムを推定したが、船が航走すると船体姿
勢が変わり、キールクリアランスが更に小さくなる
など、種々の難しい問題も指摘される 2) 。非定常な
運動計算による検証も今後の課題である。
謝辞 本研究を実施するに当たり、本学の安川宏紀教授
と田中進准教授には、有益な御議論・御助言を賜り
ました。ここに記して謝意を表します。
参考文献 1) 国土交通省港湾局監修:港湾の施設の技術上の
基準・同解説,日本港湾協会,2007.
2) 芳村康男:浅水域の船首沈下(bow squat)の簡易
推定,日本航海学会論文集,第 121 号 ,
pp.185-190, 2009.
3) 野中晃二:スコットの推定法について-Ⅰ,
NAVIGATION,第 148 号,pp.8-13,2001.
4) 野中晃二:スコットの推定法について-Ⅱ,
NAVIGATION,第 149 号,pp.8-16,2001.
5) Martin H.and Pulse D.:Vertical forces,trim
moments and changes of draught and trim of
ships in shallow water,Schiffbauforschung,
Vol.25,No.3,pp.155-159,1986.
6) 湯室彰規:浅水域における船の操縦流体力に関
する模型実験,石川島播磨技法,第 25 巻,第 4
号,pp.203-209,1985.
7) The open source CFD toolbox, OpenFOAM :
http://www.openfoam.com/
8) 川村隆文:船舶海洋分野における OpenFOAM の応
用,OpenCAE Workshop 2013,発表資料,2013.
9) 和泉一裕・佐藤徹・宮田秀明:CFD による肥大
船の操縦運動シミュレーション,日本造船学会
論文集,第 184号,pp.55-61,1998.
10) 佐野将昭・安川宏紀・岩藤博紀:浅水域におけ
る肥型船の操縦流体力特性について, 日本船舶
海洋工学会講演会論文集,第 14 号,pp.461-462,
CD-R,2012.
11) 小瀬邦治・湯室彰規・芳村康男:操縦運動の数
学モデルの具体化, 日本造船学会第 3 回操縦性
シンポジウムテキスト,pp.27-80,1981.
12) Tuck E. O.:Shallow-water flows past slender
bodies,Journal of Fluid Mechanics,Vol.26,
Part 1,pp.81-95,1966.
日本航海学会論文集 第132巻 第130回講演会にて講演
104


















