
A staggered Lax-Friedrichs-type mixed finite volume/finite ...

Advances in Water Resources 28 (2005) 117–133
www.elsevier.com/locate/advwatres
A finite analytic method for solving the 2-D time-dependentadvection–diffusion equation with time-invariant coefficients q
Thomas Lowry a,*,1, Shu-Guang Li b
a Sandia National Laboratories, P.O. Box 5800, MS 0735, Albuquerque, NM 87185, USAb Department of Civil and Environmental Engineering, Michigan State University, A135 Engineering Research Complex, East Lansing, MI 48824, USA
Received 28 April 2004; received in revised form 28 September 2004; accepted 15 October 2004
Abstract
Difficulty in solving the transient advection–diffusion equation (ADE) stems from the relationship between the advection deriv-
atives and the time derivative. For a solution method to be viable, it must account for this relationship by being accurate in both
space and time. This research presents a unique method for solving the time-dependent ADE that does not discretize the derivative
terms but rather solves the equation analytically in the space–time domain. The method is computationally efficient and numerically
accurate and addresses the common limitations of numerical dispersion and spurious oscillations that can be prevalent in other solu-
tion methods. The method is based on the improved finite analytic (IFA) solution method [Lowry TS, Li S-G. A characteristic based
finite analytic method for solving the two-dimensional steady-state advection–diffusion equation. Water Resour Res 38 (7), 10.1029/
2001WR000518] in space coupled with a Laplace transformation in time. In this way, the method has no Courant condition and
maintains accuracy in space and time, performing well even at high Peclet numbers. The method is compared to a hybrid method
of characteristics, a random walk particle tracking method, and an Eulerian–Lagrangian Localized Adjoint Method using various
degrees of flow-field heterogeneity across multiple Peclet numbers. Results show the IFALT method to be computationally more
efficient while producing similar or better accuracy than the other methods.
� 2004 Published by Elsevier Ltd.
Keywords: Contaminant transport; Groundwater; Advection–diffusion; Laplace transform
1. Introduction
Numerical methods are categorized as one of three
general types, Eulerian, Lagrangian, and mixed Eule-rian–Lagrangian (E–L). Eulerian methods attempt to
solve the ADE directly on a fixed grid. Common exam-
0309-1708/$ - see front matter � 2004 Published by Elsevier Ltd.
doi:10.1016/j.advwatres.2004.10.005
q This research was jointly sponsored by the National Science
Foundation under grants BES–9811895 and EEC–0088137 and the
New Zealand Foundation for Research, Science, and Technology,
under contract #LVLX0006.* Corresponding author. Tel.: +1 505 284 9735; fax: +1 505 844
7354.
E-mail addresses: [email protected] (T. Lowry), lishug@egr.
msu.edu (S.-G. Li).1 Formerly with Lincoln Environmental, Lincoln, New Zealand.
ples of this type of method include finite-difference and
finite-element methods. However, Eulerian methods
are generally susceptible to numerical dispersion or spu-
rious oscillations, especially when advection dominates.Lagrangian methods track a contaminant plume
through a given velocity field using particles to represent
discrete packets of solute mass. Dispersion is modelled
by adding a random component to the particle trajec-
tory at each time step. Concentrations are recovered at
the end of the simulation by summing the mass in each
cell (the number of particles) and dividing by the cell
volume. Random walk models are representative of thisclass [2–4]. Lagrangian methods are useful for locating
the spatial extent of a contaminant plume or for deriving
concentration fields for plumes of small extent. However

118 T. Lowry, S.-G. Li / Advances in Water Resources 28 (2005) 117–133
for larger problems, the method requires large numbers
of particles and small time steps to avoid statistical fluc-
tuations and particle trajectory errors. This can make
Lagrangian methods computationally heavy to imple-
ment. In addition, Lagrangian methods tend to have dif-
ficulty representing complex boundary conditions and/or solute chemistry. E–L methods, sometimes called
operator-splitting methods, split the advection and diffu-
sion/reaction portions of the ADE, solving the advection
portion using Lagrangian methods and the balance of
the equation using Eulerian methods. By utilizing the
strengths of each solution type, E–L methods have a
good balance between computational efficiency and
numerical accuracy [5–8]. However, also due to the splitnature of the method, errors from both types of solution
methods can be present [9].
One solution method that maintains the differential
character of the ADE in its numerical representation is
the finite analytic (FA) method. The FA method is an
Eulerian method that does not rely on Taylor series
approximations of the derivatives and thus avoids the
truncation error, numerical dispersion, and spuriousoscillations that can result. What separates the FA
method from other numerical methods is the analytic
nature that naturally and systematically takes into ac-
count the character of the differential equation [10,11].
The algebraic representation of the governing equations
in the FA method exhibit a gradual and analytically
based upwind shift depending on the Peclet number
and the direction of flow. The FA method was firstdeveloped for heat transfer problems by Chen and Li
[12] and Chen et al. [13]. It was further refined by Chen
and Chen [10] and Chwang and Chen [14]. The FA
method has been applied to a variety of fluid flow prob-
lems, heat transfer problems, and environmental flow
and transport problems [15–18].
The FA method starts by breaking the modelling do-
main into a series of rectangular elements, with spa-tially varying parameters assumed constant within
each element. The governing equation is then solved
analytically within each element. The solutions for each
element are linked to the neighboring elements through
the element boundary conditions, forming a system of
algebraic equations. Each equation represents the nodal
concentration at the center of each element as a linear
combination of the surrounding nodal concentrations,each multiplied by an analytically based coefficient. In
previous versions of the FA method, these analytic
coefficients are extremely complicated and at their sim-
plest contain infinite series of exponentials. The compu-
tational cost of evaluating these coefficients has
hindered FA methods from becoming more widely
used.
Li and Wei [11] addressed this issue by producing analternative FA method that is simpler and more accu-
rate than previous versions. Lowry and Li [1] further ad-
vanced this technique by accounting for spatially
varying velocities within each cell. The combination of
these two efforts produced a new FA method, called
the IFA method (improved finite analytic method) that
produces excellent results to two-dimensional steady-
state problems across a wide range of Peclet numbersand flow conditions. The advantages of the IFA method
is its simplicity and the fact that it is not as reliant on the
numerical grid size as other methods [1] since it solves
the governing equation analytically within each cell.
The IFA method is proven to be an excellent solution
method in space [1], but is limited in scope because it
cannot be applied to transient problems due to the fact
that inclusion of the time derivative yields a solutionthat is excessively complex. Chen and Li [12] were able
to apply the FA method to solve the one-dimensional
time-dependent diffusion equation, but like the early
two-dimensional steady-state counterparts discussed
above, the analytical coefficients are complex and costly
to evaluate. Other attempts to apply the FA method to
temporal problems resulted in solution methods that
were accurate in space, but not in time. For example,Chen and Chen [19,10] and Hwang et al. [18] applied
the FA method over space, but used finite differences
over time. Similarly, Tsai and Chen [20] also handled
the time derivative with finite differences but used a time
and spatially varying weighting factor to increase the
temporal accuracy. More recently, Wang [21] developed
an analytic solution to the two-dimensional diffusion
equation for use in the FA method but states that �thecomplicated form of the spatial and temporal integra-
tion makes it difficult for application to practical prob-
lems�. This issue is further increased if one considers
the added complexity of the ADE over the straight dif-
fusion equation.
To overcome this limitation, Li et al. [22] used a La-
place transform (LT) method to analytically eliminate
the time derivative from the one-dimensional, time-dependent ADE, and then solved the resulting equation
using the FA method based on Chen and Chen [10]. This
resulted in a solution method that was accurate in both
space and time, but was admittedly limited because the
application to multi-dimensions requires assumptions
that detract from the practicality of the method [22].
Historically, LT methods have been used in numeri-
cal algorithms for solving time-dependent partial differ-ential equations involving flow, diffusion, and wave
equations [23–25]. More recently, LT methods have
been used successfully for groundwater flow problems
[26] and to solve solute transport problems [27–31].
However, the main drawback to all these applications
is they lack accurate solutions in both space and time.
For instance, the work by Sudicky [27–29] is based on a
finite element (FE) method in space and the LT methodin time, producing a method that is accurate in time,
but not in space, since FE methods are susceptible to

T. Lowry, S.-G. Li / Advances in Water Resources 28 (2005) 117–133 119
spurious oscillations at high Peclet numbers and can
only increase accuracy at considerable computational
cost.
Here, we extend the concept of Li et al. [22] to multi-
dimensions by combining an accurate time-solution
method in the form of the LT with an accurate spa-tial-solution method in the form of the IFA method of
Lowry and Li [1]. Called the IFALT method (improved
finite analytic Laplace transform method), it accurately
accounts for the relationship between the advection
derivatives and the time derivative while addressing
the complexities associated with traditional FA methods
when they are applied to transient problems. As will be
demonstrated below, the method has low numerical dis-persion, performs well for advective dominated trans-
port, requires no time stepping, and is computationally
efficient.
Due to the use of the LT to solve the time portion of
the ADE, the IFALT method is constrained to problems
involving time-invariant coefficients (i.e. steady-state
flow), and to conservative contaminants or those under-
going first-order decay. This omits certain importantclasses of problems (e.g. variable-density flow and trans-
port) but also encompasses many of the groundwater
transport problems being addressed today. This is
mainly due to limited data that describe continually
changing conditions, such as boundary conditions and/
or recharge rates. Typically these parameters are esti-
mated on annual or seasonal basis, for which the IFALT
method could be used through a series of stress periods.Many times these parameters take on effective values for
the length of the simulation, making those problems per-
fectly suited for the IFALT and other LT methods.
Fig. 1. Local finite analytic element showing �upstream� information
crossing the element boundary for a general flow direction from lower
left to upper right. As the flow direction changes, the positions of p 0
and p00, and the upstream source node (i � 2, j � 1) will change.
2. Numerical implementation
2.1. Governing equations
The problem considered here is unsteady transport in
a two-dimensional velocity field undergoing first-order
decay with internal sources and sinks. The governing
equation for this problem is
ðCÞt þr � ðuC �DrCÞ þ kC ¼ S ð1Þwhere (C)t is the concentration gradient with respect to
time, $ is the gradient operator assumed over two
dimensions, x and y, C = C(x, t) is the solute concentra-
tion; u = u(x) is the velocity vector, x is the position vec-
tor (0 6 x < 1); t is time; D = D(x) is a second rank
tensor of dispersion coefficients; k = k(x) is the first-or-
der decay constant; and S = S(x) is a source–sink term.All coefficients are assumed varying in space, but not in
time.
Boundary conditions for Eq. (1) can be given by the
general formula
a1C þ a2DrC ¼ f ðtÞ ð2Þwhere a1�2, and f(t) are coefficients or functions that are
dependent on the type of boundary condition beingmodelled.
2.2. Laplace transformation
The aim of the finite analytic method is to solve Eq.
(1) analytically within a series of uniform rectangular ele-
ments across the modelling domain. A sample element is
shown in Fig. 1. To produce an analytical solution that issimple enough to be computationally feasible, spatially
varying coefficients are assumed constant within each
element. However, the time derivative in Eq. (1) adds
considerable complexity to the analytical solution and
thus we use a LT to remove the time derivative, produc-
ing a ‘‘stead-state’’ solution in Laplace space.
The Laplace transform L of a function h(t) is defined
as [32]
L½hðtÞ� ¼ ~hðpÞ ¼Z
hðtÞe�pt dt ð3Þ
where ~h is the transform of h and p is the complex valued
LT parameter given as p = a + ib, where i ¼ffiffiffiffiffiffiffi�1
p.
Applying Eq. (3) to Eq. (1) returns
r � ðueC �DreCÞ þ ðkþ pÞeC ¼ S þ g ð4Þwhere the tilde (�) indicates the complex valued Laplace
transformed concentration and g is an additional
�source� term that is defined as the real valued initial con-
dition. The complex valued concentration eC in Eq. (4) is
a function of x, y, and p, and not of t. The form of Eq.(4) is the same as the steady-state ADE but with addi-
tional source (g) and ‘‘decay’’ terms (p).
Applying the Laplace transform to the boundary
condition function, we get
a1 eC þ a2DreC ¼ f ðpÞ ð5Þwhere all terms are explained above.

120 T. Lowry, S.-G. Li / Advances in Water Resources 28 (2005) 117–133
2.3. The improved finite analytic method
The spatial portion of the IFALT method is based
on the IFA method of Lowry and Li [1]. The advantage
of the IFA method over previous FA methods lies in its
accuracy and simplicity that stem from four mainpoints: First, the IFA method solves the analytically
difficult dispersion terms numerically before solving
the numerically difficult advection terms analytically.
In this way, the character of the derivatives are kept in-
tact and the solution remains relatively simple. Second
is velocity variations within each element are accounted
for by particle tracking between the element node and
the boundary. This allows for higher accuracy in deter-mining the plume trajectory as well as the local element
boundary condition. Thirdly, is the local element
boundary condition takes advantage of upstream infor-
mation, which reduces the interpolation length on the
boundary. Finally, the method uses a higher order
interpolation scheme to further increase the interpola-
tion accuracy.
The method begins by discretizing the modelling do-main (Fig. 1) and re-writing the dispersion terms using a
finite difference approximation. This approximation is
then substituted back into Eq. (4) and gives
ui;jr � eCi;j þ ðkþ pÞeCi;j ¼ Si;j þ gi;j þ F i;j ð6Þ
where i and j are the element column and row indices
and indicate the corresponding value within the ith
and jth element. Fi,j is given as
F i;j ¼ ðfxx þ fyy þ fxy þ fyxÞi;j ð7Þ
where fxx, fyy, fxy, fyx, are the finite difference approxi-
mations of the second-order dispersion terms evaluated
at node i, j.
Eq. (6) is a first-order hyperbolic partial differential
equation describing the complex valued concentration
within an element as a function of x, y, and p. Solving
(6) analytically and evaluating at the central node of
each element gives
eCi;j ¼ eCp0e�ðkþpÞDs þ
F i;j þ Si;j þ gi;jðkþ pÞ ð1� e�ðkþpÞDsÞ ð8Þ
where eCp0 is the concentration on the element boundarywhere the characteristic curve that passes through the
central nodal point of the element crosses the boundary
(Fig. 1), and Ds is the travel time for a particle on the
element boundary to reach the central nodal point.
To account for velocity fluctuations across the ele-
ment, a bi-linear particle tracking scheme is used to
track a particle backwards from the central nodal point
to the boundary. The tracking is also used to determineDs. Due to the steady-state velocity field, particle track-
ing is performed only once at the beginning of each
simulation.
The boundary concentration, eCp0 , is evaluated by
interpolating along the boundary segment where eCp0
lies. To do this, we first look in the upstream direction
to find the point p00 on the boundary segment where
the characteristic curve from an upstream nodal point
crosses the boundary (Fig. 1). The upstream nodal pointis selected based on the direction of flow, and the posi-
tion and tracking time to p00 are determined through
forward particle tracking from the upstream nodal point
to the boundary. The concentration at p00, eCp00 , is calcu-
lated using the solution to Eq. (6) evaluated at p00. This
gives
eCp00 ¼ eCm;ne�ðkþpÞDsm;n þ
F m;n þ Sm;n þ gm;nðkþ pÞ
� ð1� e�ðkþpÞDsm;nÞ ð9Þ
where m, n are the element indices of the upstream nodal
point (i � 2, j � 1 in Fig. 1). Finally, eCp0 is interpolated
between p00 and the opposite boundary nodal point
(i � 1, j) using Hermite interpolation [33]. It is worth
reiterating that the upstream nodal point, the opposite
boundary nodal point, and the relative positions of p 0
and p00 are all dependent on the direction of flow.
2.4. Final form
By nesting the above procedures, an algebraic equa-
tion is produced that is a description of the concentra-
tion in each element as a weighted average of the
concentrations and derivatives of the surrounding
nodes. For the case where u P 0, v P 0, and u P v (as
shown in Fig. 1), the concentration equation in each ele-ment becomes
eCi;j ¼ A1eCi�2;j�1 þ A2
eCi�3;j�1 þ A3eCi�1;j�1
þ A4ðeCi�2;j�2 þ eCi�2;jÞ þ A5eCi�1;j
þ A6ðeCi�3;j�2 � eCi�3;j � eCi�1;j�2Þ
þ A7eCY i�2;j�1 þ A8ðeCY i�3;j�1 þ eCY i�1;j�1Þ
þ A9ðeCY i�2;j�2 þ eCY i�2;jÞ þ A10eCY i�1;j
þ A11ðeCY i�3;j�2 � eCY i�1;j�2 � eCY i�3;jÞ
þ A12eCiþ1;j þ A13ðeCi;j�1 þ eCi;jþ1Þ
þ A14ðeCiþ1;jþ1 � eCi�1;jþ1 � eCiþ1;j�1Þ þ A15 ð10Þ
where A1–15 are given in Tables 1 and 4, and eCY is the
y-derivative of the concentration. Again, the reader is
reminded that this solution describes the complex valued
concentration in Laplace space.
The derivative terms result from the use of the Her-
mite interpolation and which one (x or y) appears inEq. (10) is a function of the direction of flow through
the element. For this example, the corresponding
y-derivative equation is

Table 1
Coefficients for use in Eq. (10)
A1 ¼ 1R0e�ðkþpÞbt ða2Rf þ a4RuyÞ
A2 ¼ 1R0e�ðkþpÞbt ða2Rxxf þ a4Ruyf Þ
A3 ¼ 1R0ðe�ðkþpÞbt ða2Rxxf � a4Ruyf Þ þ Rxyb Þ
A4 ¼ 1R0a2e�ðkþpÞbt Ryyf
A5 ¼ 1R0ðe�ðkþpÞbt ða1 þ a2Rxyf Þ þ Rxxb Þ
A6 ¼ 1R0a2e�ðkþpÞbt Rxyf
A7 ¼ 1R0a4e�ðkþpÞbt Rfy
A8 ¼ 1R0a4e�ðkþpÞbt Rxxfy
A9 ¼ 1R0a4e�ðkþpÞbt Ryyfy
A10 ¼ 1R0e�ðkþpÞbt ða3 þ a4Rxyfy Þ
A11 ¼ 1R0a4e�ðkþpÞbt Rxyfy
A12 ¼RxxbR0
A13 ¼RyybR0
A14 ¼RxybR0
A15 ¼1
R0ðe�kbt ða2Ref ðSi�2;j�1 þ gi�2;j�1Þ
þ a4Refy ðSY i�2;j�1 þ GY i�2;j�1ÞÞ þ Reb ðSi;j þ gi;jÞÞ
Table 2
Coefficients for use in Eq. (11)
B1 ¼ 1R0y
e�ðkþRvybþpÞbtb2Rf
B2 ¼ 1R0y
e�ðkþRvybþpÞbt ðb2Rxxf þ b4Ruyf ÞB3 ¼ 1
R0ye�ðkþRvybþpÞbt ðb2Rxxf � b4Ruyf Þ
B4 ¼ 1R0y
e�ðkþRvybþpÞbtb2Ryyf
B5 ¼ 1R0y
½e�ðkþRvybþpÞbt ðb1 þ b2Rxyf Þ þ Ruyb �B6 ¼ 1
R0ye�ðkþRvybÞbtb2Rxyf
B7 ¼ 1R0y
e�ðkþRvybÞbtb4Rfy
B8 ¼ 1R0y
e�ðkþRvybÞbtb4Rxxfa
B9 ¼ 1R0y
e�ðkþRvybþpÞbtb4Ryyfa
B10 ¼ 1R0y
½e�ðkþRvybþpÞbt ðb4Rxyfy þ b3Þ þ Rxxby �B11 ¼ 1
R0ye�ðkþRvybþpÞbtb4Rxyfa
B12 ¼Rxxby
R0y
B13 ¼Ryyby
R0y
B12 ¼Rxyby
R0y
B15 ¼1
R0y
fe�ðkþRvybþpÞbt ½b2Ref ðSi�2;j�1 þ gi�2;j�1Þ
þ b4Refy ðSY i�2;j�1 þ GY i�2;j�1Þ� þ Reby ðSY i;j þ GY i;jÞg
B16 ¼ 1R0y
ðe�ðkþRvybþpÞbtb4Rxxfa þ Rxyba Þ
B17 ¼�RuybR0y
Table 3
Coefficients for use in Eq. (12)
BH
1 ¼ 1R0x
e�ðkþRuxbþpÞbt ð1� rdÞRfx
BH
2 ¼ 1R0x
e�ðkþRuxbÞbt ð1� rdÞRxxfx
BH
3 ¼ 1R0x
½e�ðkþRuxbþpÞbt ð1� rdÞRxxfx þ Rxybx �BH
4 ¼ 1R0x
e�ðkþRuxbþpÞbt ð1� rdÞRyyfx
BH
5 ¼ 1R0x
½e�ðkþRuxbÞbt ðrd þ ð1� rdÞRxyfx Þ þ Rxxbx �BH
6 ¼ 1R0x
e�ðkþRuxbþpÞbt ð1� rdÞRxyfx
BH
7 ¼ 1R0x
e�ðkþRuxbÞbt ð1� rdÞRvxf
BH
8 ¼ RxxbxR0x
BH
9 ¼ RyybxR0x
BH
10 ¼RxybxR0x
BH
11 ¼�RvxbR0x
BH
12 ¼1
R0x
½Refxe�ðkþRuxbþpÞbt ð1� rdÞðSX i�2;j�1 þ GX i�2;j�1Þ
þ Rebx ðSX i;j þ GXi;jÞ�
T. Lowry, S.-G. Li / Advances in Water Resources 28 (2005) 117–133 121
eCY i;j ¼ B1eCi�2;j�1 þ B2
eCi�3;j�1 þ B3eCi�1;j�1
þ B4ðeCi�2;j�2 þ eCi�2;jÞ þ B5eCi�1;j
þ B6ðeCi�3;j�2 � eCi�3;j � eCi�1;j�2Þ
þ B7eCY i�2;j�1 þ B8
eCY i�3;j�1
þ B9ðeCY i�2;j�2 þ eCY i�2;jÞ þ B10eCY i�1;j
þ B11ðeCY i�3;j�2 � eCY i�1;j�2 � eCY i�3;jÞ
þ B12eCY iþ1;j þ B13ðeCY i;j�1 þ eCY i;jþ1Þ
þ B14ðeCY iþ1;jþ1 � eCY i�1;jþ1 � eCY iþ1;j�1Þ
þ B15 þ B16eCY i�1;j�1 þ B17
eCiþ1;j ð11Þ
where B1–17 are given in Tables 2 and 4. For the x-deriv-
ative we get
eCX i;j ¼ BH
1eCX i�2;j�1 þ BH
2eCX i�3;j�1 þ BH
3eCX i�1;j�1
þ BH
4 ðeCX i�2;j�2 þ eCX i�2;jÞ þ BH
5eCX i�1;j
þ BH
6 ðeCi�3;j�2 � eCX i�3;j � eCX i�1;j�2Þ
þ BH
7 ðeCi�2;j � eCi�2;j�2Þ þ BH
8eCX iþ1;j
þ BH
9 ðeCX i;jþ1 þ eCX i;j�1Þ
þ BH
10ðeCX iþ1;jþ1 � eCX iþ1;j�1 � eCX i�2;j�2Þ
þ BH
11ðeCi;jþ1 � eCi;j�1Þ þ BH
12 ð12Þ
where BH
1–17 are given in Tables 3 and 4. The terms eCXand eCY refer to the x and y derivatives of eC ,
respectively.
The resulting three equations form a set of linear
algebraic equations in Laplace p space that is solved
with a suitable iterative or matrix solution technique
over successive values of p. Discussion on the number
of p evaluations and spatial discretization are given
below. What results is a three-dimensional array of the
complex valued concentration, eCðNx;Ny ; 2N þ 1Þ,where Nx and Ny are the number of nodes in the x
and y directions and 2N + 1 is the number of p values
evaluated.

Table 4
Coefficients common to Eqs. (10)–(12)
R0 ¼ 1þ 2Rxxb þ 2Ryyb R0y ¼ 1þ 2Rxxby þ 2Ryyby R0x ¼ 1þ 2Rxxbx þ 2Ryybx
Rf ¼ e�ðkþpÞft � 2Rxxf � 2Ryyf Rfy ¼ e�ðkþRvyfþpÞft � 2Rxxfy � 2Ryyfy Rfx ¼ e�ðkþRuxfþpÞft � 2Rxxfx � 2Ryyfx
Reb ¼ð1�e�ðkþpÞbt Þ
ðkþpÞ Reby ¼ð1�e
�ðkþRvybþpÞbt ÞðkþRvybþpÞ Rebx ¼
ð1�e�ðkþRuxbþpÞbt ÞðkþRuxbþpÞ
Ref ¼ ð1�e�ðkþpÞft ÞðkþpÞ Refy ¼
ð1�e�ðkþRvyf þpÞft Þ
ðkþRvyf þpÞ Refy ¼ð1�e
�ðkþRuxf þpÞft ÞðkþRuxf þpÞ
Rxxb ¼Dxxi;j
Dx2 Reb Rxxby ¼Dxxi;j
Dx2 Reby Rxxbx ¼Dxxi;j
Dx2 Rebx
Ryyb ¼Dyyi;j
Dy2 Reb Ryyby ¼Dyyi;j
Dy2 Reby Ryybx ¼Dyyi;j
Dy2 Rebx
Rxyb ¼Dxyi;jþDyxi;j
4DxDy Reb Rxyby ¼Dxyi;jþDyxi;j
4DxDy Reby Rxybx ¼Dxyi;jþDyxi;j
4DxDy Rebx
Rxxf ¼ Dxxi�2;j�1
Dx2 Ref Rxxfy ¼Dxxi�2;j�1
Dx2 Refy Rxxfx ¼Dxxi�2;j�1
Dx2 Refx
Ryyf ¼ Dyyi�2;j�1
Dy2 Ref Ryyfy ¼Dyyi�2;j�1
Dy2 Refy Ryyfx ¼Dyyi�2;j�1
Dy2 Refx
Rxyf ¼ Dxyi�2;j�1þDyxi�2;j�1
4DxDy Ref Rxyfy ¼Dxyi�2;j�1þDyxi�2;j�1
4DxDy Refy Rxyfx ¼Dxyi�2;j�1þDyxi�2;j�1
4DxDy Refx
Ruyb ¼ui;jþ1�ui;j�1
4DxDy Ruxb ¼uiþ1;j�ui�1;j
2Dx
Rvyb ¼vi;jþ1�vi;j�1
2Dy Rvxb ¼viþ1;j�vi�1;j
4DxDy
Ruyf ¼ ui�2;j�ui�2;j�2
4DxDy Ruxf ¼ ui�1;j�1�ui�3;j�1
2Dx
Rvyf ¼ vi�2;j�vi�2;j�2
2Dy Rvxf ¼ vi�1;j�1�vi�3;j�1
4DxDy
The term ft is the forward particle travel time from the upstream source node (i � 2, j � 1 in this case) to the element boundary, and bt is the backward
particle travel time from node Pi,j to the element boundary.
122 T. Lowry, S.-G. Li / Advances in Water Resources 28 (2005) 117–133
2.5. Inversion of the laplace transformation
The IFALT method utilizes the Laplace inversion
algorithm developed by DeHoog et al. [34] due to its
performance in the area of discontinuities (sharp con-
centration fronts), and the fact that the inverse formany values of time can be obtained from one set of
Laplace parameter evaluations. The form of the De-
Hoog et al. algorithm used in this research was imple-
mented by Neville in 1989 and later modified by
McLaren in 1991 to allow inversion one nodal point
at a time. The FORTRAN code for the DeHoog algo-
rithm was obtained directly from Sudicky and McLaren
(in 1999) for this research with no significant changes tothe 1991 form.
The inverse Laplace transform, modified from the
general form to specify concentration, is given by [22]
Cðx; y; tÞ ¼ 1
2pi
Z aþi1
a�i1ept eCðx; y; pÞdp ð13Þ
By manipulating the real and imaginary parts of (13), an
alternative expression is formed:
Cðx; y; tÞ ¼ eat
p
Z 1
0
fRe½eCðx; y; pÞ� cosxt
� Im½eCðx; y; pÞ� sinxtgdx ð14Þ
where Re and Im denote the real and imaginary parts oftheir arguments and a and x are defined below.
If we discretize Eq. (14) using a trapezoidal rule with
a step size of p/T, we obtain the following approx-
imation:
Cðx; y; tÞ � eat
T
(1
2Re½eCðx; y; aÞ�þ
X2Nþ1
k¼0
Re½eCðx; y; pÞ� cosxt
�X2Nþ1
k¼0
Im½eCðx; y; pÞ� sinxt)
ð15Þ
where x = ip/T. Eq. (15) is the basis of the Fourier
inversion method first used by Dubner and Abate [35]
and later improved by others [36–39]. Here the complex
concentrations serve as the Fourier coefficients.
The infinite series in Eq. (15) have been truncated to
2N + 1 terms, which introduces truncation error into the
inversion process. An expression for the error term com-
pared to (2N + 1) ! 1 is given by Crump [37] fromwhich the parameter a can be evaluated. It is given as
a = l � ln(Er)/2T, where l is the order of C(x,y, t) such
that jC(x,y, t)j 6 Melt with M being constant. The term,
Er, is defined [37] as the relative error (Er = E/Melt) and
E is an error term that arises since the Fourier coeffi-
cients are not exact but are approximations usingeCðx; y; pÞ. Sudicky [27] suggests that l = 0, Er = 10�6,
and T = 0.8tmax are adequate for most transport prob-lems and recommends using a = �ln(E 0)/1.6tmax, where
E 0 is the maximum tolerable relative error and tmax is
the maximum time of the simulation.
The complete procedure involves calculatingeCðx; y; pkÞ, [k = 0 . . . 2N] for each value of pk and a sin-
gle value tmax. Once this array is evaluated, inversion at
any time 0.1tmax < t < tmax can then be performed. For
t < 0.1tmax, the absolute error term becomes unmanage-able due the averaging effect of Fourier series at discon-
tinuities (e.g. C(x,y, t) at t = 0) [37]. It is convenient to

T. Lowry, S.-G. Li / Advances in Water Resources 28 (2005) 117–133 123
save the complex concentration array and perform the
inversion as part of a post processing procedure.
2.6. Dimensional and p-space discretization
There are two types of errors associated with theinversion of the LT, approximation error and truncation
error. The first type of error is of a general nature with
respect to any LT solution method that utilizes a Fou-
rier approximation in the inversion routine, and is due
to the approximation of the Fourier series in Eq. (15).
As discussed above, it is controlled by the selection of
the a parameter. In reality, approximation error is minor
in comparison to other sources of error. However, withregards to truncation error there are specific issues asso-
ciated with the IFALT method that are not present in
other LT methods.
If we consider a single element in the IFALT domain
and re-write Eq. (8), assuming no reaction, dispersion,
or source terms we geteCi;j ¼ eCp0e�pDn=U ð16Þ
where Dn is the distance along the streamline from the
central nodal point to the element boundary and U is
the average velocity along the streamline over the dis-
tance Dn. Noting that p = a + ib and b = kx/i = kp/T,equation (16) can be re-written aseCi;j ¼ eCp0e
�aDn=U ðcosðkpDn=ðUT ÞÞ þ i sinðkpDn=ðUT ÞÞÞð17Þ
From Eq. (17) it can be seen that the value of the com-
plex valued concentration at the central nodal point is
periodic in both space and successive values of pk[k = 0 . . . 2N + 1]. The spatial period is proportional to
U and T, and inversely proportional to k. Over k, theperiod is proportional to U and T, and inversely propor-
tional to Dn. This information can be used to determine
appropriate spatial discretization as well as the number
of p values, or what we call p-space discretizations, to
solve for the concentration. Specifically, for the spatial
period, we get
UðDnÞ � 2TUk
ð18Þ
and over k the period is
UðkÞ � 2TUDn
ð19Þ
The periods are given as approximations since the coef-
ficient of the exponent in Eq. (16), eCp0 , is complex val-
ued and thus also periodic, which effectively reduces
the periodicity of eCi;j. With respect to the IFALT meth-od the value of Dn/U is usually small as compared to T,
meaning that consideration must be given to both the
p-space and spatial discretization. For sharp-edged
plumes in a smooth velocity field, good results are
generally obtained using values of T/(DsN) < 3, where
2N + 1 is the number of p evaluations and Ds = Dn/U.
For irregular plumes, the period is reduced by the peri-
odic coefficient so that values of T=ðDsNÞ < 5 are suffi-
cient and where Ds is the domain average of Ds. Forplumes undergoing dispersion, or for soft-edged plumes,these rules can be significantly relaxed. As an example,
for sharp-edged plumes undergoing pure advection, with
travel distances of 250 grid cells (T � 250Ds), values ofN from 25–80 will produce sufficient accuracy. In prac-
tice, we have found values of N from 10–30 to be ade-
quate for most transport problems.
3. Examples and comparisons
Three different hypothetical examples are simulated.
The first example simulates a step function input from
the left hand boundary of a rectangular modelling do-
main, as it moves left to right through a uniform velocity
field at three different Peclet numbers, 300, 120, and 20.
This 1-D example enables comparison to an analyticalsolution and tests the ability of the IFALT method to
model sharp concentration fronts undergoing various
levels of dispersion. Additional simulations with this
configuration are performed with varying p-space and
grid-space discretization to show the sensitivity of the
method to these two parameters. The second example
simulates transport of a Gaussian source plume through
a randomly generated heterogeneous flow field with twodegrees of heterogeneity; one with a log-conductivity
variance of 1.5 and the other at 0.5. Transport is simu-
lated at three different Peclet numbers, 300, 120, and 20.
The third example simulates a Gaussian source plume
through a deterministic sinusoidal velocity field, where
the velocity in the x-direction is given as a constant
and the velocity in the y-direction is given as a sine func-
tion dependent on the x-position in the domain. As theplume moves through the domain, it periodically
deforms and reforms, allowing for direct com-
parison to the initial condition at each sine-wave period.
This example assumes no dispersion or molecular
diffusion.
Comparisons are made to three other numerical
methods and either an analytical solution (Examples 1
and 3) or a high-resolution numerical solution (Example2). For the first example, the three additional numeri-
cal methods are: a finite difference Laplace transform
method (FDLT), a hybrid method of characteristics
(HMOC) [40,41], and an Eulerian–Lagrangian localized
adjoint method (ELLAM) [7,42–47]. For the second
example comparison is made to a random walk parti-
cle tracking method (RW) [4,48] instead of the FDLT
method. The third example compares only the ELLAMand the IFALT methods. Each method is briefly ex-
plained below.

124 T. Lowry, S.-G. Li / Advances in Water Resources 28 (2005) 117–133
The FDLT method uses an upwinding finite differ-
ence method in space, and the LT method in time. This
allows comparison of the IFALT method to a solution
method that is accurate in time but not in space.
The RWmethod is based on [4] and is the same as the
explanation in the introduction. The initial distributionof particles is random within each cell with the number
of particles determined by dividing the user given solute
mass in each cell by the particle mass. RW methods are
free from numerical dispersion so they provide an excel-
lent means to determine the shape and extent of a
plume.
The HMOC method is part of the original MT3D
transport model package [40] and uses the method ofcharacteristics (MOC) in areas of high concentration
gradients and the modified method of characteristics
(MMOC) in areas of low concentration gradients. In
this way, the HMOC method reduces the numerical dis-
persion common with the MMOC method by utilizing
the computationally heavy, yet much more accurate
MOC method only when needed. The HMOC method
is very accurate under most transport conditions. How-ever, even with the inclusion of the more computation-
ally easy MMOC method in the low gradient areas,
high computational costs are still an issue.
The ELLAM scheme used here is the finite-volume
implementation that is part of the MOC3D transport
package [45]. The ELLAM was first introduced in
1990 [7] and due to its sound conceptual basis, is has
undergone significant expansions and development sincethat time, with applications to many practical problems.
As the name implies, it is a �high-resolution� Eulerian–Lagrangian method that solves an integral form of the
ADE by tracking mass associated with fluid volumes
through time [49]. It then separately solves for disper-
sion on a fixed grid in space. Because of its theoretical
foundation, mass conservation is inherent in the EL-
LAM as well as its ability to handle complicated bound-ary functions. It also has the ability to handle large time
steps with Courant conditions �1, which makes it very
computationally efficient as compared to other time-
stepping methods. However, under certain circum-
stances, it can show non-physical oscillations [47].
Simulations were performed on a 2.56Ghz Pentium-4
computer with 1.0Gb of RAM. All codes were compiled
under Compaq Visual Fortran with the default maxi-mum optimizations. Where appropriate, absolute con-
vergence for each solution was set at 5e�5.
3.1. Example 1—square pulse source
The first example uses a heaviside boundary function
on the left hand side of a rectangular modelling domain.
The domain is 225m by 100m with 1m grid spacing inboth directions. The initial and boundary conditions
are given by
Cðx; y; 0Þ ¼ 0 x P 0
Cð0; y; tÞ ¼C0 0 6 t 6 s
0 t > s
�Cð1; y; 0Þ ¼ 0 t P 0
where �1 6 y 6 1, t is time, s is the length of thesource pulse, and C0 is the magnitude of the pulse con-
centration. For this example, s = 25 days and
C0 = 100mg/l. The rest of the boundaries are designated
as advective flux boundaries with inflow concentrations
of zero and outflow concentrations equal to the simu-
lated concentration at the boundary. The longitudinal
dispersivity is al = 0.003333, 0.008333, and 0.05m to
produce Peclet numbers (Pe) of 300, 120, and 20, respec-tively. The simulations are numbered example 1a
(Pe = 300), 1b (Pe = 120), and 1c (Pe = 20). The lateral
and transverse to longitudinal dispersivity ratio is set
to 0.1. The analytical solution used as comparison in
this example is given by [29]
Cðx; y; tÞ ¼ C0
2exp
�kxU
� �"erfc
x� Utð1þ HÞ2
ffiffiffiffiffiDt
p� �
� erfcx� Uðt � sÞð1þ HÞ
2ffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiDðt � sÞ
p( )#ð20Þ
where U is the pore velocity, D is the dispersion coeffi-
cient, k is the first-order decay constant, and all other
terms are described above.
For the IFALT and FDLT methods, the p-space dis-cretization is N = 40 for 1a, N = 25 for 1b, and N = 15
for 1c. The HMOC method used a Courant condition
of one, a concentration weighting factor of one, and
the fourth-order Runga–Kutta particle tracking algo-
rithm. For the ELLAM method, the key parameters
are NSCEXP, NSREXP, NTEXP, and CELDIS, which
are the spatial discretization parameters that define the
character of the test-functions (among other things)and the time discretization parameters. NSCEXP and
NSREXP represent the exponent for calculating the
number of subcells in the column and row directions,
respectively. Here we use NSCEXP = 2 and ES-
REXP = 2. Likewise, NTEXP is the exponent for calcu-
lating the number of sub-timesteps and is set to a value
of 2 for this example. CELDIS is the Courant condition
which is the maximum fraction of a cell dimension that aparticle can move in one time step. For this example,
CELDIS = 100. For all the solution methods, parame-
ters were adjusted over many simulations to produce a
good balance of computational efficiency and accuracy,
with the cutoff being that further increases in computa-
tional speed would quickly decrease accuracy. The glo-
bal parameters defining this example are given in
Table 5.

Table 5
Parameter values for Example 1
Grid size (m) 225 · 100
Grid spacing (m) Dx = 1.0, Dy = 1.0
Velocity field (m/day) u = 1.0, v = 0.0
Step Source x = 0, 25 days
Longitudinal dispersivity; (m) 0.003333, 0.008333, and 0.05 (al)Ratio of al to trans. disp. (at) 0.1
Laplace p-space discretization 40 (1a), 25 (1b), 10 (1c)
Simulation time (days) 200
0.0
0.1
0.2
0.3
0.4
0.5
0.6
0.7
0.8
0.9
1.0
1.1
1.2
160 170 180 190 200 210 220
Distance (m)
C/C
0
IFALT
HMOC
ELLAM
FDLT
Analytical
Fig. 2. Step function profile for Example 1a (Pe = 300).
0.0
0.1
0.2
0.3
0.4
0.5
0.6
0.7
0.8
0.9
1.0
1.1
1.2
160 170 180 190 200 210 220
Distance (m)
C/C
0
IFALT
HMOC
ELLAM
FDLT
Analytical
Fig. 3. Step function profile for Example 1b (Pe = 120).
0.0
0.1
0.2
0.3
0.4
0.5
0.6
0.7
0.8
0.9
1.0
1.1
1.2
160 170 180 190 200 210 220
Distance (m)
C/C
0
IFALT
HMOC
ELLAM
FDLT
Analytical
Fig. 4. Step function profile for Example 1c (Pe = 20).
T. Lowry, S.-G. Li / Advances in Water Resources 28 (2005) 117–133 125
Figs. 2–4 show plots of the concentration profile in
the longitudinal direction for each solution method at
each Peclet number.
3.2. Example 2—heterogeneous flow
Example 2 predicts transport in a heterogeneous flow
field to test the ability of the IFALT method to handle
complicated flow fields efficiently, robustly, and accu-
rately. The difficulty in modelling transport through het-
erogeneous media lies in the variability of the velocity
across the domain. Relatively small zones within the do-
main will consist of very high velocities, which for time-
stepping solution methods means time steps must bekept small to capture that detail. Where time-stepping
is not an issue, the inability to handle the large value
of the advection terms through those zones can lead to
artificial oscillations.
For the model set-up, the hydraulic conductivity is
represented as a spatially-correlated random field (Fig.
5) characterized by the mean (mean LnK), variance
(r2LnK), and correlation scales (kx and ky) of the log con-
ductivity. Two different values of r2LnK are used, 0.5 and
1.5, which are fairly typical values for many types of sed-
imentary aquifers [50,51]. Boundary conditions for the
flow model are set as constant head boundaries to pro-
vide a mean x-velocity of 0.8m/day and a mean y-veloc-
ity of 0.0m/day. The grid layout consists of a 500 · 100
node grid with 1m grid spacings. The initial concentra-
tion consists of a Gaussian plume located at x = (50,50)with a variance in both the x and y directions of 135m2.
Simulations are performed with Pe = 300, 120, and 20
(based on the mean x-velocity). The simulations are la-
belled as 2a (Pe = 300, r2LnK ¼ 0:5), 2b (Pe = 120,
r2LnK ¼ 0:5), 2c (Pe = 20, r2
LnK ¼ 0:5), 2d (Pe = 300,
r2LnK ¼ 1:5), 2e (Pe = 120, r2
LnK ¼ 1:5), and 2f (Pe = 20,
r2LnK ¼ 1:5). The parameters defining this example are
given in Table 6.Unlike the first example, no analytical solution is
available for this example and thus a high-resolution
model with four times the resolution of the example
set is created and solved for using the HMOC method.
The results from this case provides the baseline for com-
paring the different methods.
50 100 150 200 250 300 350 400 450 500
X-Coordinate (m)
50
100
Y-C
oord
inat
e (m
)
-1.5 -0.5 0.5 1.5 2.5 3.5 4.5 5.5 6.5 7.5 8.5LnK (m/day)
Fig. 5. Log conductivity distribution for heterogeneous test runs
shown in (Figs. 6–11).

Fig. 6. Concentration contours for Example 2a. The number in the
lower left hand corner is the simulation runtime in h:m:s format.
Table 6
Parameter values for Example 2
Grid size (m) 500 · 100
Grid spacing (m) Dx = 1.0, Dy = 1.0
Mean velocity field (m/day) u = 0.8, v = 0.0
Simulation time (days) 400
Gaussian source (x,y), var (m2) (50,50), 135
Mean log conductivity (m/day) 3.219
Variance LnK 0.5 and 1.5 (r2LnK )Correlation length scales (m) 10, 5 (kx, ky)Longitudinal dispersivity (m) 0.003333, 0.008333, and
0.05 (al)Ratio of al to trans. disp. (at) 0.1
Molecular diff. coef. (cm2/day) 0.0 (D*)
Laplace p-space discretization N = 10 (N = 15, Example 2a)
Number of particles for RW method 795,849
126 T. Lowry, S.-G. Li / Advances in Water Resources 28 (2005) 117–133
Model parameters and convergence criteria were kept
the same as above, with the exception of N = 10 for the
IFALT method (except for 2a where N = 15), and
NSC = 2, NSR = 1, NT = 1, and CELDIS = 200 for
the ELLAM method.
Figs. 6–11 show the two-dimensional plumes for 2a
to 2f, respectively.
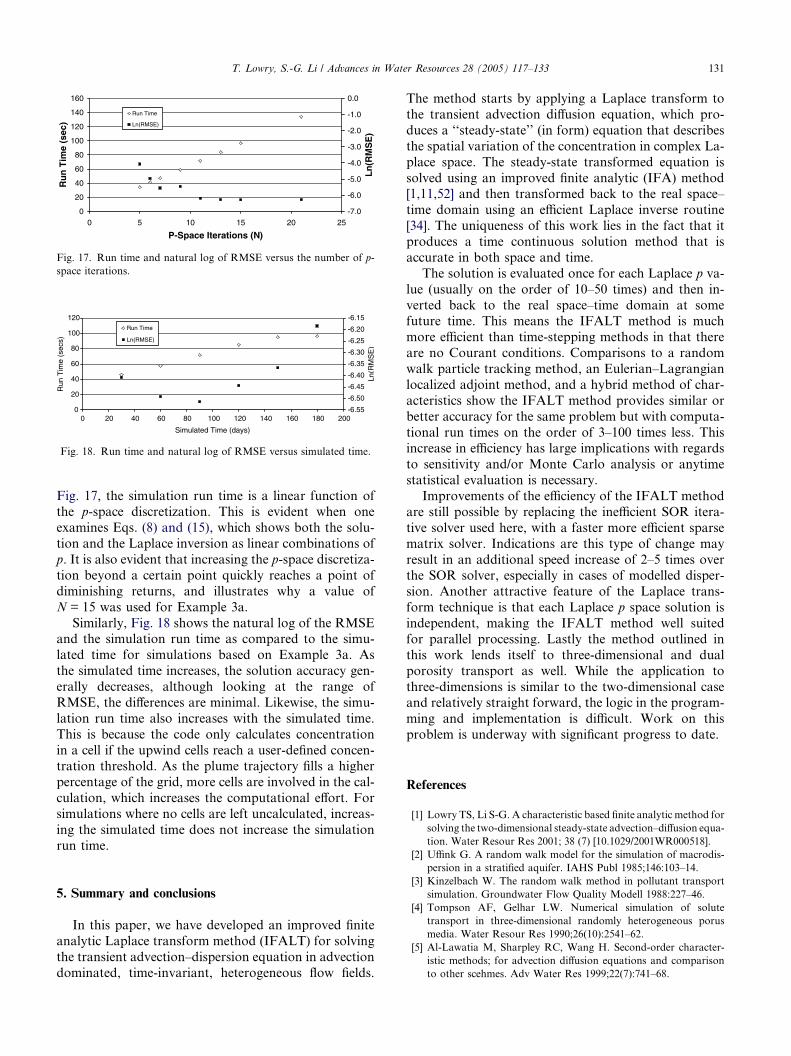
3.3. Example 3—deterministic flow field
Example 3 simulates advective transport of a Gaus-
sian plume through a deterministic, sinusoidal velocity
field. The equations describing the velocities in the x
and y directions are
V x ¼ U const ð21Þ
and
V y ¼ V mag sinpxP
� �þ V const ð22Þ
where Vx is the velocity in the x-direction which is equal
to a constant velocity Uconst, Vy is the velocity in the
y-direction, Vmag is the velocity amplitude, x is the x-
position in the domain, P is the half period of the sinefunction, and Vconst is a constant.
This example simulates two mean directions of flow,
one at 22.5� above horizontal and the other at 45.0�.These examples are labelled as 3a (22.5�) and 3b
(45.0�). By adding the sine function to the constant
y-velocity, the plume deforms and then reforms every
P units in the x-direction (Fig. 12). By not simulating
dispersion and molecular diffusion, we can comparethe plume every nP units in the x-direction from the
starting point directly to the initial condition to assess
each methods ability to handle complicated flow regimes
that are not oriented with the grid. The significance of
Example 3a is that the 22.5� angle represents the worst
case scenario for the IFALT method since that is the an-
gle where the interpolation distance along each cell
boundary is the highest.
Both 3a and 3b use a uniform domain that is 275
cells in the x-direction and 275 cells in the y-directionwith each cell measuring 1m by 1m. For Example
3a, the flow field is described by setting
Uconst = 1.0m/d, Vmag = 2.0m/d, P = 15m, and
Vconst = 0.4142m/d. Example 3b changes Vconst to
1m/d. The simulation time for both Examples is 180
days, which means the plume deforms and reforms
15 times during its migration (Fig. 12). Run-time
parameters for this example are shown in Table 8. Re-sults are presented by transecting the plume parallel to
the y-axis through its center, and plotting the dimen-
sionless concentration along that line. These plots are
shown in Figs. 13 and 14. Additionally, run-times
and mass-balance for both methods are compared
and shown in Table 9.

Fig. 7. Concentration contours for Example 2b. The number in the
lower left hand corner is the simulation runtime in h:m:s format.Fig. 8. Concentration contours for Example 2c. The number in the
lower left hand corner is the simulation runtime in h:m:s format.
T. Lowry, S.-G. Li / Advances in Water Resources 28 (2005) 117–133 127
4. Discussion
For Example 1a, the IFALT and HMOC methods
were able to match the analytical solution almost ex-
actly. The ELLAM method suffered from non-physical
oscillations at the solute interface and the FDLT suf-
fered from severe numerical dispersion. With the added
dispersion (1b and 1c), the IFALT and ELLAM meth-
ods matched the analytical solution while the HMOCmethod showed spikes in the break through curve due
to the particle nature of the solution. The oscillations
present in the ELLAM simulation were not present for
the cases with dispersion. The IFALT method was able
to closely match the analytical solution in all cases.
For the simulations in Example 2, all methods
matched the overall shape and character of each plume
(Figs. 6–11). Generally, as the degree of heterogeneity
increased, and the level of dispersion decreased, the
matches deteriorated, mainly due to numerical disper-
sion and/or spurious oscillations. This is evident by
examining the maximum and minimum dimensionless
concentrations (C/C0) for each simulation (Table 7).
The best matches occurred for simulation 2c, wherethe IFALT method showed a maximum dimensionless
concentration (MDC) of 0.62, as compared to 0.64 for
the HMOC method, 0.69 for the ELLAM method,
and 1.19 for the RW method. The high-resolution ‘‘ex-
act’’ solution returned a MDC of 0.61. Negative concen-
trations were predicted by both the IFALT and
ELLAM methods across all simulations due to oscilla-
tions from the Laplace inverse routine and from spuri-ous oscillations, respectively. The ELLAM method
also showed MDC�s much higher than the ‘‘exact’’ solu-
tion for simulations 2a–c.

Fig. 9. Concentration contours for Example 2d. The number in the
lower left hand corner is the simulation runtime in h:m:s format.
Fig. 10. Concentration contours for Example 2e. The number in the
lower left hand corner is the simulation runtime in h:m:s format.
128 T. Lowry, S.-G. Li / Advances in Water Resources 28 (2005) 117–133
The HMOC and RW methods were the most com-
putationally costly while the IFALT method was the
least costly. Not including the high-resolution HMOC
simulation (which had run times on the order of five
days), run times across all of Example 2 ranged from
just over 4h for the RW simulation in 2f to 1.2m for
the IFALT method in 2a. The IFALT method provided
the best balance of accuracy and efficiency, offering anapproximate order of magnitude decrease in simulation
time over the ELLAM method, and approximately two-
orders magnitude over the HMOC and RW methods.
Across all runs of Example 2, the IFALT method was
3.23 (2f) to 6.00 (2a) times faster then the ELLAM
method, 6.61 (2c) to 39.42 (2d) times faster than the
HMOC method, and 26.81 (2c) to 111.79 (2d) times fas-
ter then the RW method.
The third example compares only the ELLAM and
IFALT methods and shows the IFALT method provid-
ing virtually identical results to the ELLAM method.
For Example 3a, the cross-section plots overlay the ana-
lytical solution almost exactly, with the mass balance
providing 99.99% and 99.989% for the ELLAM and
IFALT methods, respectively. For Example 3b, themass balance is 99.99% and 99.989% (ELLAM and
IFALT). Computationally the IFALT method was fas-
ter, with a simulation time of 1min 36.54s for Example
3a as compared to 2min, 44.53s for the ELLAM meth-
od. For Example 3b the times were 1min, 34.14s and
3min, 1.72s for the IFALT and ELLAM methods,
respectively.
The efficiency of the IFALT method over the time-stepping methods will increase as the simulated time in-
creases since the computational run time for the IFALT
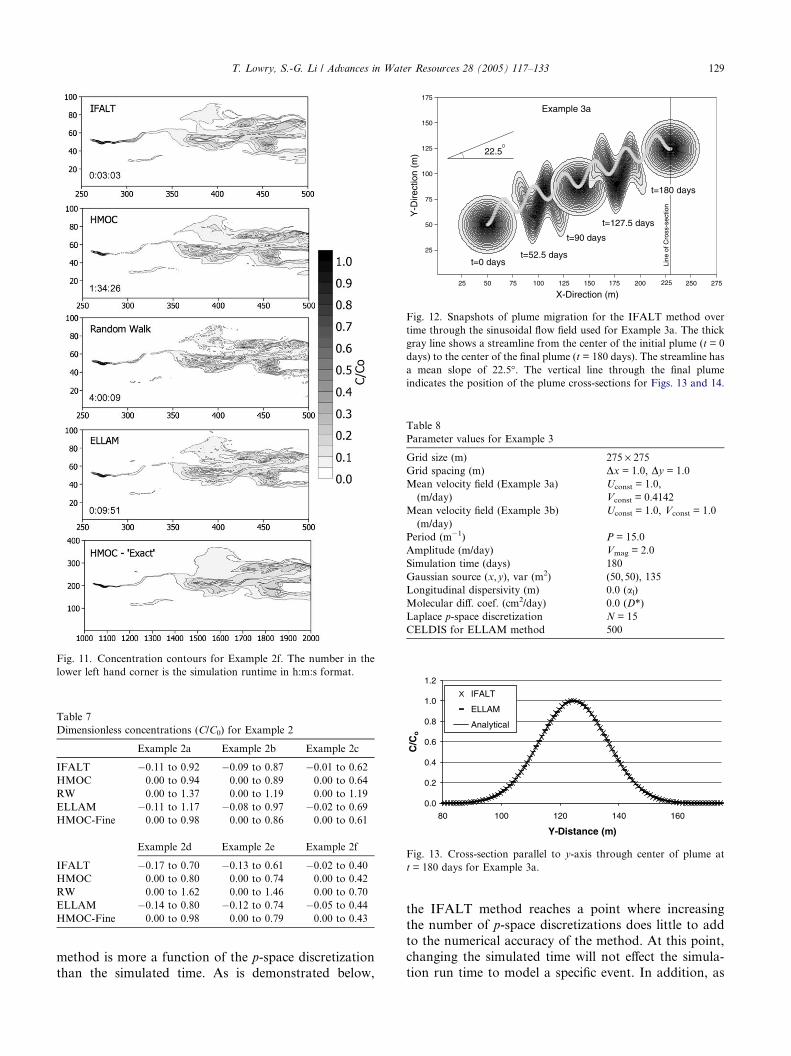
Fig. 11. Concentration contours for Example 2f. The number in the
lower left hand corner is the simulation runtime in h:m:s format.
25 50 75 100 125 150 175 200 250 275
25
50
75
100
125
150
175
X-Direction (m)
Y-D
irect
ion
(m)
t=0 dayst=52.5 days
t=90 days
t=127.5 days
Example 3a
22.5
Line
of C
ross
-sec
tion
t=180 days
225
Fig. 12. Snapshots of plume migration for the IFALT method over
time through the sinusoidal flow field used for Example 3a. The thick
gray line shows a streamline from the center of the initial plume (t = 0
days) to the center of the final plume (t = 180 days). The streamline has
a mean slope of 22.5�. The vertical line through the final plume
indicates the position of the plume cross-sections for Figs. 13 and 14.
Table 7
Dimensionless concentrations (C/C0) for Example 2
Example 2a Example 2b Example 2c
IFALT �0.11 to 0.92 �0.09 to 0.87 �0.01 to 0.62
HMOC 0.00 to 0.94 0.00 to 0.89 0.00 to 0.64
RW 0.00 to 1.37 0.00 to 1.19 0.00 to 1.19
ELLAM �0.11 to 1.17 �0.08 to 0.97 �0.02 to 0.69
HMOC-Fine 0.00 to 0.98 0.00 to 0.86 0.00 to 0.61
Example 2d Example 2e Example 2f
IFALT �0.17 to 0.70 �0.13 to 0.61 �0.02 to 0.40
HMOC 0.00 to 0.80 0.00 to 0.74 0.00 to 0.42
RW 0.00 to 1.62 0.00 to 1.46 0.00 to 0.70
ELLAM �0.14 to 0.80 �0.12 to 0.74 �0.05 to 0.44
HMOC-Fine 0.00 to 0.98 0.00 to 0.79 0.00 to 0.43
Table 8
Parameter values for Example 3
Grid size (m) 275 · 275
Grid spacing (m) Dx = 1.0, Dy = 1.0
Mean velocity field (Example 3a)
(m/day)
Uconst = 1.0,
Vconst = 0.4142
Mean velocity field (Example 3b)
(m/day)
Uconst = 1.0, Vconst = 1.0
Period (m�1) P = 15.0
Amplitude (m/day) Vmag = 2.0
Simulation time (days) 180
Gaussian source (x,y), var (m2) (50,50), 135
Longitudinal dispersivity (m) 0.0 (al)Molecular diff. coef. (cm2/day) 0.0 (D*)
Laplace p-space discretization N = 15
CELDIS for ELLAM method 500
0.0
0.2
0.4
0.6
0.8
1.0
1.2
80 100 120 140 160
Y-Distance (m)
C/C
o
IFALT
ELLAM
Analytical
Fig. 13. Cross-section parallel to y-axis through center of plume at
t = 180 days for Example 3a.
T. Lowry, S.-G. Li / Advances in Water Resources 28 (2005) 117–133 129
method is more a function of the p-space discretization
than the simulated time. As is demonstrated below,
the IFALT method reaches a point where increasing
the number of p-space discretizations does little to add
to the numerical accuracy of the method. At this point,
changing the simulated time will not effect the simula-
tion run time to model a specific event. In addition, as

Table 9
Run times and mass balance for Example 3
Solution
method
3a Run
time (s)
3a Mass
balance
3b Run
time (s)
3b Mass
balance
IFALT 96.5 99.894% 94.1 99.800%
ELLAM 164.5 99.996% 181.7 99.992%
0.0
0.2
0.4
0.6
0.8
1.0
1.2
180 200 220 240 260
Y-Distance (m)
C/C
o
IFALT
ELLAM
Analytical
Fig. 14. Cross-section parallel to y-axis through center of plume at
t = 180 days for Example 3b.
0.80
0.85
0.90
0.95
1.00
1.05
1.10
1.15
1.20
173 174 175 176 177 178 179 180 181 182Distance (m)
C/C
o
130
75
50
30
5
Analytical
# of Laplace p Evaluations
Fig. 15. Each line shows the IFALT solution as obtained using the
indicated number of Laplace p evaluations. Generally as the number of
evaluations goes up, oscillations diminish and accuracy increases.
0.80
0.85
0.90
0.95
1.00
1.05
1.10
1.15
1.20
173 174 175 176 177 178 179 180 181 182
Distance (m)
C/C
0
dx = dy = 0.5 m
dx = dy = 2.5 m
dx = dy = 5.0 m
Analytical
dx = dy = 1.0 m
Fig. 16. As the grid size increases, oscillations associated with the
Laplace transform inverse routine are reduced.
130 T. Lowry, S.-G. Li / Advances in Water Resources 28 (2005) 117–133
the degree of heterogeneity increases, the time-stepping
methods are forced towards smaller time steps and
longer computational run times, which again increases
the relative efficiency of the IFALT method over the
other methods. The implications of this speed improve-
ment are significant, especially if one considers the
improved ability to perform sensitivity or Monte Carlo
analysis or model set-up and calibration.Outside the increase in simulation efficiency, the
IFALT method has the added benefit of performing
the inversion at any time less then the maximum simula-
tion time. If at a later time, the need arises to examine
results that are different from your initial output, you
simply run the inversion program at the new time with-
out having to re-run the entire model.
4.1. Sensitivity to temporal and spatial discretization
To test the IFALT method�s robustness and accuracy
over different grid sizes and p-space discretizations, we
use the same spatial extent and source configuration as
Example 1a, but use grid spacings of 0.5m, 1.0m,
2.5m, and 5m coupled with p-space discretizations of
N = 5, 30, 50, 75, and 130.Fig. 15 shows a close-up of the upper trailing edge of
the solute step-function, using the base-case grid size of
1m square, and varying the number of p-space discreti-
zations. For N = 5, the solution is highly oscillatory and
quite unsatisfactory. However as N increases, the oscil-
lations diminish. At N = 50, there is a slight rounding
of the sharp edge and for NP 75, the solution matches
the analytical solution almost exactly.
The same trend can be seen if the p-space discretiza-
tions are held constant and the grid spacing is varied.
Fig. 16 again shows a close up of the trailing edge of
the step-function, but with a fixed value of N = 30 and
the grid spacing varying as described above. Generally,as the grid space is increased, the oscillations diminish.
This is what is predicted by Eq. (19). However, as with
any solution method, if the spacing becomes too large
(e.g. when Dx = Dy = 5.0m) the quality of the solution
diminishes due to a loss of resolution.
As another example, Fig. 17 shows the natural log of
the root mean square error (RMSE) and the simulation
run time as compared to the number of p-space discret-izations for simulations based on Example 3a. The
RMSE is calculated by the following equation:
RMSE ¼
ffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiPNxi¼1
PNy
j¼1ðCi;j � Cai;jÞ
2
Nx � Ny
sð23Þ
where Ci,j is the concentration as predicted by the model
in cell i, j, Cai;j is the analytical solution in cell i, j, Nx is
the number of cells in the x-direction, and Ny is the
number of cells in the y-direction. As can be seen in
0
20
40
60
80
100
120
140
160
0 5 10 15 20 25
P-Space Iterations (N)
Ru
n T
ime
(sec
)
-7.0
-6.0
-5.0
-4.0
-3.0
-2.0
-1.0
0.0
Ln
(RM
SE
)
Run Time
Ln(RMSE)
Fig. 17. Run time and natural log of RMSE versus the number of p-
space iterations.
0
20
40
60
80
100
120
0 20 40 60 80 100 120 140 160 180 200
Simulated Time (days)
Run
Tim
e (s
ecs)
-6.55
-6.50
-6.45
-6.40
-6.35
-6.30
-6.25
-6.20
-6.15
Ln(R
MS
E)
Run Time
Ln(RMSE)
Fig. 18. Run time and natural log of RMSE versus simulated time.
T. Lowry, S.-G. Li / Advances in Water Resources 28 (2005) 117–133 131
Fig. 17, the simulation run time is a linear function ofthe p-space discretization. This is evident when one
examines Eqs. (8) and (15), which shows both the solu-
tion and the Laplace inversion as linear combinations of
p. It is also evident that increasing the p-space discretiza-
tion beyond a certain point quickly reaches a point of
diminishing returns, and illustrates why a value of
N = 15 was used for Example 3a.
Similarly, Fig. 18 shows the natural log of the RMSEand the simulation run time as compared to the simu-
lated time for simulations based on Example 3a. As
the simulated time increases, the solution accuracy gen-
erally decreases, although looking at the range of
RMSE, the differences are minimal. Likewise, the simu-
lation run time also increases with the simulated time.
This is because the code only calculates concentration
in a cell if the upwind cells reach a user-defined concen-tration threshold. As the plume trajectory fills a higher
percentage of the grid, more cells are involved in the cal-
culation, which increases the computational effort. For
simulations where no cells are left uncalculated, increas-
ing the simulated time does not increase the simulation
run time.
5. Summary and conclusions
In this paper, we have developed an improved finite
analytic Laplace transform method (IFALT) for solving
the transient advection–dispersion equation in advection
dominated, time-invariant, heterogeneous flow fields.
The method starts by applying a Laplace transform to
the transient advection diffusion equation, which pro-
duces a ‘‘steady-state’’ (in form) equation that describes
the spatial variation of the concentration in complex La-
place space. The steady-state transformed equation is
solved using an improved finite analytic (IFA) method[1,11,52] and then transformed back to the real space–
time domain using an efficient Laplace inverse routine
[34]. The uniqueness of this work lies in the fact that it
produces a time continuous solution method that is
accurate in both space and time.
The solution is evaluated once for each Laplace p va-
lue (usually on the order of 10–50 times) and then in-
verted back to the real space–time domain at somefuture time. This means the IFALT method is much
more efficient than time-stepping methods in that there
are no Courant conditions. Comparisons to a random
walk particle tracking method, an Eulerian–Lagrangian
localized adjoint method, and a hybrid method of char-
acteristics show the IFALT method provides similar or
better accuracy for the same problem but with computa-
tional run times on the order of 3–100 times less. Thisincrease in efficiency has large implications with regards
to sensitivity and/or Monte Carlo analysis or anytime
statistical evaluation is necessary.
Improvements of the efficiency of the IFALT method
are still possible by replacing the inefficient SOR itera-
tive solver used here, with a faster more efficient sparse
matrix solver. Indications are this type of change may
result in an additional speed increase of 2–5 times overthe SOR solver, especially in cases of modelled disper-
sion. Another attractive feature of the Laplace trans-
form technique is that each Laplace p space solution is
independent, making the IFALT method well suited
for parallel processing. Lastly the method outlined in
this work lends itself to three-dimensional and dual
porosity transport as well. While the application to
three-dimensions is similar to the two-dimensional caseand relatively straight forward, the logic in the program-
ming and implementation is difficult. Work on this
problem is underway with significant progress to date.
References
[1] Lowry TS, Li S-G. A characteristic based finite analytic method for
solving the two-dimensional steady-state advection–diffusion equa-
tion. Water Resour Res 2001; 38 (7) [10.1029/2001WR000518].
[2] Uffink G. A random walk model for the simulation of macrodis-
persion in a stratified aquifer. IAHS Publ 1985;146:103–14.
[3] Kinzelbach W. The random walk method in pollutant transport
simulation. Groundwater Flow Quality Modell 1988:227–46.
[4] Tompson AF, Gelhar LW. Numerical simulation of solute
transport in three-dimensional randomly heterogeneous porus
media. Water Resour Res 1990;26(10):2541–62.
[5] Al-Lawatia M, Sharpley RC, Wang H. Second-order character-
istic methods; for advection diffusion equations and comparison
to other scehmes. Adv Water Res 1999;22(7):741–68.

132 T. Lowry, S.-G. Li / Advances in Water Resources 28 (2005) 117–133
[6] Russell T. Eulerian–Lagrangian localized adjoint methods for
advection-dominated problems, Numerical Analysis 1989. Pitman
Res Notes Math Ser 1989;228:206–28.
[7] Celia M, Russell T, Herrera I, Ewing R. An Eulerian–Lagrangian
localized adjoint method for the advection diffusion equation.
Adv Water Res 1990;13(4):187–206.
[8] Healy R, Russell T. A finite-volume Eulerian–Lagrangian local-
ized adjoint method for solution of the advection–dispersion
equation. Water Resour Res 1993;29(7):2399–413.
[9] Ruan F, Dennis M. An investigation of Eulerian–Lagrangian
methods for solving heterogeneous advection-dominated trans-
port problems. Water Resour Res 1999;35(8):2359–73.
[10] Chen C, Chen H. Finite-analytic numerical method for unsteady
two-dimensional Navier–Stokes equations. J Comput Phys
1984;52:209–26.
[11] Li S-G, Wei SC. Improved finite-analytic methods for steady-state
heterogeneous transport in multi-dimensions. J Hydraul Eng
1998;124(4):358.
[12] C. Chen, P. Li, Finite differential method in heat conduction–
application of analytic solution technique. ASME Paper 79-WA/
HT-50, 1979, p. 250, 2–7 December, ASME Winter Annual
Meeting, New York, NY, 1979.
[13] Chen C, Naseri-Neshat H, Ho K. Finite-analytic numerical
solution of heat transfer in two-dimensional cavity flow. J Numer
Heat Transfer 1981;4:179–97.
[14] Chwang A, Chen H. Optimal finite difference method for potential
flows. J Eng Mech 1987;113(11):1759–73.
[15] Chen C, Yoon Y. Finite-analytic numerical solution of axisym-
metric Navier–Stokes and energy equations. J Heat Transfer
1983;105:639–45.
[16] Choi S, Chen C. Finite analytic numerical solution of turbulent
flow past axisymmetric bodies by zone modeling approach.
ASME, Fluids Eng Div FED 1985;66:23–32.
[17] Elnawawy O, Valocchi A, Ougouag A. The cell analytical-
numerical method for solution of advection–dispersion equation:
two-dimensional problems. Water Resour Res 1990;6(11):
2705–16.
[18] Hwang JC, Chen C-J, Sheikoslami M, Panigrahi BK. Finite-
analytic numerical solutions for two dimensional groundwater
solute transport. Water Resour Res 1985;21(9):1354–60.
[19] Chen C, Chen H, Finite analytic numerical method for unsteady
two-dimensional Navier–Stokes equations. Tech rep, Energy
Division and Iowa Institute of Hydraulic Research, University
of Iowa, Iowa City, IA, December 1982.
[20] Tsai W-F, Tien H-C, Chen C-J. Finite analytic numerical
solutions for unsaturated flow with irregular boundaries. J
Hydraul Eng 1993;119(11):1274–97.
[21] Wang C. Characteristic finite analytic method (CFAM) for
incompressible Navier–Stokes equations. Acta Mech
2000;143:57–66.
[22] Li S-G, Ruan F, McLaughlin D. A space–time accurate method
for solving solute transport problems. Water Resour Res
1992;28(9):2297–306.
[23] Gurtin M. Variational principles for linear initial value problems.
Q Appl Math 1965;22:252–6.
[24] Javandel I, Witherspoon P. Application of the finite element
method to transient flow in porous media. Soc Pet Eng J
1968;8:241–52.
[25] Liggett J, Liu P-F. The boundary integral equation method for
porous media flow, Winchester, Mass, 1983.
[26] Moridis G, Reddell R. The Laplace transform finite difference
method for simulation of flow through porous media. Water
Resour Res 1991;27(8):1873–84.
[27] Sudicky E. The Laplace transform Galerkin technique: a
time-continuous finite element theory and application to
mass transport in groundwater. Water Resour Res 1989;25(8):
1833–46.
[28] Sudicky E. The Laplace transform Galerkin technique for efficient
time-continuous solution of solute transport in double-porosity
media. Geoderma 1990;46:209–32.
[29] Sudicky E, McLaren R. The Laplace transform Galerkin
technique for large-scale simulation of mass transport in discretely
fractured porous formations. Water Resour Res 1992;28(2):
499–514.
[30] Ren L. A hybrid Laplace transform finite element method for
solute radial dispersion problem in subsurface flow. J Hydrody-
nam 1994;9:37–43.
[31] Ren L, Zhang R. Hybrid Laplace transform finite element method
for solving the convection–dispersion problem. Adv Water Res
1999;23:229–37.
[32] Carrier G. Partial differential equations. San Diego, CA: Aca-
demic Press, Inc; 1976.
[33] Holly F, Preissmann A. Accurate calculation of transport in two
dimensions. J Hydraul Div Am Soc Civ Eng 1977;103(HY11):
1259–77.
[34] DeHoog F, Knight J, Stokes A. An improved method for
numerical inversion of Laplace transforms. SIAM J Sci Stat
Comput 1982;3(3):357–66.
[35] Dubner H, Abate J. Numerical inversion of Laplace transforms
by relating them to the finite Fourier cosine transform. J Assoc
Comput Mach 1968;15(1):115–23.
[36] Cooley J, Lewis P, Welch P. The fast Fourier transform
algorithm: Programming considerations in the calculation of
sine, cosine, and Laplace transforms. J Sound Vib 1970;12:
315–37.
[37] Crump KS. Numerical inversion of Laplace transforms using a
Fourier series approximation. J Assoc Comput Mach 1976;23(1):
89–96.
[38] Durbin F. Numerical inversion of Laplace transforms: an efficient
improvement to Dubner and Abate�s method. Comput J
1974;17:371–6.
[39] Silverberg M. Improving the efficiency of Laplace-transform
inversion for network analysis. Electron Lett 1970;6:105–6.
[40] Zheng C. MT3D A modular three-dimensional transport
model for simulation of advection, dispersion, and chemical
reactions of contaminants in groundwater systems. In: Docu-
mentation and users guide. S.S. Papadopulos & Associates;
1991–92.
[41] Zheng C, Wang P. Mt3dms: a modular three-dimensional
multispecies model for simulation of advection, dispersion, and
chemical reactions of contaminants in groundwater systems.
Documentation and users guide. Tech rep, US Army Engineer
Research and Development Center, Vicksburg, MS, 1999.
[42] Wang H, Russell TF, Ewing RE. Eulerian–Lagrangian localized
adjoint methods for variable-coefficient convection–diffusion
problems arising in groundwater applications. Numer Methods
Water Resour 1992:25–31.
[43] Celia M. Eulerian–Lagrangian localized adjoint methods for
contaminant transport simulations. In: Peters A, editor. Proceed-
ings of the 10th International Conference on Computation
Methods in Water Resources. Dordrecht: Kluwer; 1994.
[44] Konikow L, Goode D. Hornberger G. A three-dimensional
method of characteristics solute transport model (MOC3D). Tech
Rep 96–4267, US Geological Survey, Reston, VA.
[45] Heberton C, Russell T, Konikow L, Hornberger G. A three
dimensional finite volume Eulerian–Lagrangian localized adjoint
method (ELLAM) for solute-transport modeling, Tech Rep 00-
4087, US Geological Survey, Reston, VA.
[46] M. Al-Lawatia, H. Wang, A preliminary investigation on an
ELLAM scheme for linear transport equations. Numer. Methods
Partial Differ Equat 2002;19 (1), doi:10.1002/num.10042.
[47] Russell TF, Celia MA. An overview of research on Eulerian–
Lagrangian localized adjoint methods (ELLAM). Adv Water Res
2002;25:1215–31.

T. Lowry, S.-G. Li / Advances in Water Resources 28 (2005) 117–133 133
[48] T. Prickett, T. Naymik, C. Lonnquist, A �random walk� solutetransportmodel for selected groundwater quality evaluations. Tech
Rep Bull 65, Illinois State Water Survey, Champaign, IL, 1981.
[49] Runkel RL. Solution to the advection–dispersion equation:
Continuous load of finite duration. USGS Otis Documentation
Web Publication, 1996. Available from: <http://webserver.cr.
usgs.gov/otis/documentation/r96/r96.html>.
[50] Burr D, Sudicky E, Naff R. Nonreactive and reactive solute
transport in three-dimensional heterogeneous porous media:
Mean displacement, plume spreading, and uncertainty. Water
Resour Res 1994;30(3):791–815.
[51] Sudicky E. A natural gradient experiment on solute transport in a
sand aquifer: spatial variability of hydraulic conductivity and its
role in the dispersion process. Water Resour Res 1986;22(15):
2069–82.
[52] Lowry TS. An improved finite analytic method for unsteady
transport in heterogeneous porous media. PhD thesis, Portland
State University, 2000.







![arXiv:1806.02695v1 [math.NT] 7 Jun 2018 · belline n-dimensional representation of Gal(L/L) satisfying mild genericity assump-tions a finite length locally Qp-analytic representation](https://static.fdocuments.net/doc/165x107/5b9a305809d3f207308d49ec/arxiv180602695v1-mathnt-7-jun-2018-belline-n-dimensional-representation.jpg)








