
A NEW DESIGN METHODOLOGY FOR MODULAR BROADBAND …
210
The Pennsylvania State University The Graduate School College of Engineering A NEW DESIGN METHODOLOGY FOR MODULAR BROADBAND ARRAYS BASED ON FRACTAL TILINGS A Thesis in Electrical Engineering by Waroth Kuhirun Submitted in Partial Fulfillment of the Requirements for the Degree of Doctor of Philisophy August 2003 © 2003 by Waroth Kuhirun
Transcript of A NEW DESIGN METHODOLOGY FOR MODULAR BROADBAND …

The Pennsylvania State University
The Graduate School
College of Engineering
A NEW DESIGN METHODOLOGY FOR MODULAR BROADBAND ARRAYS BASED ON FRACTAL TILINGS
A Thesis in
Electrical Engineering
by
Waroth Kuhirun
Submitted in Partial Fulfillment of the Requirements
for the Degree of
Doctor of Philisophy
August 2003
© 2003 by Waroth Kuhirun

We approve the thesis of Waroth Kuhirun. Date of Signature ____________________________ ___________________ Douglas H. Werner Associate Professor of Electrical Engineering Thesis Adviser Chair of Committee ___________________________ ___________________ Raj Mittra Professor of Electrical Engineering ____________________________ ____________________ James K. Breakall Professor of Electrical Engineering ____________________________ ____________________ Pingjuan L. Werner Associate Professor of Engineering ____________________________ _____________________ Brian Weiner Associate Professor of Physics ____________________________ _____________________ W. Kenneth Jenkins Professor of Electrical Engineering Head of the Department of Electrical Engineering

iii
Abstract
In this thesis, a new and innovative technique based on the theory of fractal tilings
is introduced for the design of modular broadband arrays. These arrays are unique in the
sense that they possess a fractal boundary contour that tiles the plane without gaps or
overlaps. The first of these new array configurations that will be considered is directly
related to the family of space-filling and self-avoiding fractals known as Peano-Gosper
curves. The elements of the fractal array are uniformly distributed along a Peano-Gosper
curve, which leads to a planar array configuration with parallelogram cells that is
bounded by a closed Koch curve. These unique properties are exploited in order to
develop a design methodology for deterministic arrays that have no grating lobes even
when the minimum spacing between elements is increased to at least one-wavelength.
This leads to a class of arrays that are relatively broadband when compared to more
conventional periodic planar arrays with square or rectangular cells and regular boundary
contours. This type of fractal array differs fundamentally from other types of fractal array
configurations that have been studied previously that have regular boundaries with
elements distributed in a fractal pattern on the interior of the array.
An efficient iterative procedure for calculating the radiation patterns of these
Peano-Gosper fractal arrays to arbitrary stage of growth P is also introduced in this
thesis. Moreover, we note that Peano-Gosper arrays are self-similar since they may be
formed in an iterative fashion such that the array at stage P is composed of seven
identical stage P-1 sub-arrays (i.e., they consist of arrays of arrays). This lends itself to a
convenient modular architecture whereby each of these sub-arrays could be individually
controlled. In other words, the unique arrangement of tiles forms sub-arrays that could be

iv
designed to support simultaneous multibeam and multifrequency operation. Finally,
several other examples of fractal tilings that lead to broadband array configurations will
be considered including terdragon and 6-terdragon arrays.
This thesis also introduces several new self-scalable arrays that can be generated
by repeated application of a ring subarray generator, including pentagonal, octagonal, and
honeycomb arrays. These arrays have the advantage that they can be recursively
generated, allowing development of rapid algorithms for calculating their radiation
patterns. They are also shown to possess relatively low sidelobe levels. Lastly, the
radiation characteristics of some basic three-dimensional volumetric fractal arrays
generated using concentric sphere subarrays will be briefly considered.
v
TABLE OF CONTENTS Page LIST OF TABLES............................................................................................... ix LIST OF FIGURES .............................................................................................. x ACKNOWLEDGEMENTS................................................................................ xx Chapter 1 Background............................................................................................... 1
1.1 Fractal Arrays using Circular and Concentric Ring Subarray Generator .................................................................... 4
1.1.1 Sierpinski Gasket Array Pattern.......................................... 8
1.1.2 Self-Scalable Hexagonal Array Pattern ............................. 14
1.2 Mathematical Tools for determining the Performance of Fractal Arrays ............................................................................... 25 1.2.1 Directivity .......................................................................... 25
1.2.2 Plot of Array Factor in Terms of n or Ψ .......................... 26
2 Fractal Arrays Using Ring Subarray Generators .................................... 30
2.1 Self-Scalable Pentagonal Arrays....................................................... 30
2.2 Self-Scalable Octagonal Arrays........................................................ 40
2.3 Honeycomb Fractal Arrays ............................................................... 50

vi
TABLE OF CONTENTS (continued)
Chapter Page
2.3.1 Results of Honeycomb Fractal Arrays............................... 51
2.4 Conclusion ........................................................................................ 53
3 Generalized Principle of Pattern Multiplication and Multiple-Generator Fractal Arrays ......................................................... 55 3.1 Conventional Principle of Pattern Multiplication ............................. 55
3.2 Generalized Principle of Pattern Multiplication ............................... 56
3.3 Fractal Arrays Generated by Multiple Generators............................ 59
4 Peano and Sierpinski Dragon Fractal Arrays.......................................... 62
4.1 Construction of the Peano Curve ...................................................... 62
4.2 Construction of the Peano Fractal Array .......................................... 66
4.3 The Construction of Sierpinski Dragon Array.................................. 79
4.4 Sierpinski Dragon Arrays ................................................................. 82
5 The Peano-Gosper Fractal Array ............................................................ 89
5.1 Construction of Peano-Gosper Curves.............................................. 90
5.2. Construction of the Peano-Gosper Fractal Array............................. 93
5.3. Results............................................................................................ 101
5.4. Conclusions.................................................................................... 113
6 Broadband Arrays Produced by Fractal Tilings.................................... 114
6.1 The Terdragon and the 6-Terdragon Arrays ................................... 114
6.1.1. Construction of the Terdragon Fractal Array ................................................................... 117

vii
TABLE OF CONTENTS (continued) Chapter Page
6.1.2. Construction of the 6-Terdragon Fractal Array ................................................................... 120
6.1.3. Radiation Characteristics of the Terdragon and 6-Terdragon Fractal Arrays .................... 122
6.1.4 Conclusions...................................................................... 139
7 Coordinate Transformation for 3-D Antenna Arrays and its Application to Beamforming............................................................ 140
8 3-D Fractal Arrays Using Concentric Sphere Array Generators ............................................................................................. 147 8.1 Introduction..................................................................................... 147
8.2 Synthesis of 3-D Fractal Arrays using Concentric Sphere Array Generators................................................................. 148
8.2.1 Menger Sponge (3-D Sierpinski Carpet) Array ............... 151
8.2.1.1 Results of Menger Sponge Arrays .................... 156
8.2.2 3-D Sierpinski Gasket Arrays .......................................... 159
8.2.2.1 Results of the Stage 3 3-D Sierpinski Gasket Array ..................................................... 164
8.3 Conclusions..................................................................................... 168
9 Conclusions and Future Work ............................................................. 169
9.1 Conclusions .................................................................................... 169
9.2 Future Work .................................................................................... 172
References......................................................................................................... 174
Appendix: A.1 Directivity of 2-D (Planar) Arrays containing N in-phase isotropic elements .................................................. 179

viii
TABLE OF CONTENTS (continued)
Chapter Page
A.2 Directivity of 3-D Antenna Arrays containing
N isotropic Elements ...................................................................... 182
A.3 Array Factor of 2-D (Planar) Arrays Expressed in terms of
Ψ or n ........................................................................................... 185

ix
LIST OF TABLES
Page 2.1 Comparison of maximum directivity for a stage 3 unmodified self-scalble octagonal array and a stage 3 modified self-scalable octagonal array..........................................................................................................50 4.1 The parameters xn and yn expressed in terms of dmin ................................................84
5.1 Expressions for ),( nn yx in terms of the array parameters α,mind ,andδ ..........................................................................................................100 5.2 The maximum directivity for several different Peano-Gosper fractal arrays...................................................................................109 5.3 Comparison of maximum directivity for a stage 3 Peano-Gosper array with 344 elements and a 19x19 square array with 361 elements...........................110 6.1 Expressions of xn and yn in terms of the parameters dmin, α and δ .........................120
6.2 Maximum directivity for several different terdragon fractal arrays .......................134
6.3 Maximum directivity for several different 6-terdragon fractal arrays ....................135
6.4 Comparison of maximum directivity of a stage 6 terdragon array of 308 elements with a 18x18 square array of 324 elements ......................................136 6.5 Comparison of maximum directivity of a stage 3 6-terdragon array of 79 elements with a 9x9 square array of 81 elements ..............................................136

x
LIST OF FIGURES
1.1 Geometry for an M-ring subarray generator where each ring has a total of N elements. The location of the mnth element is shown .......................5 1.2 Ring subarray generators ...................................................................................6 1.3 Sierpinski gasket ................................................................................................9 1.4 Various stages of growth for the Sierpinski gasket array .................................10 1.5 Plot of the Sierpinski gasket array factor for various stages of growth with kr = 3.........................................................................................................12 1.6 Plot of the Sierpinski Gasket array factor for various stages of growth with kr = 1.5......................................................................................................14 1.7 Self-scalable hexagonal antenna array..............................................................15 1.8 Figures representing the self-scalable hexagonal antenna array.......................16 1.9 The array factor pattern of self-scalable hexagonal array (Stage 1) .................19 1.10 The array factor pattern of self-scalable hexagonal array (Stage 2) .................20 1.11 The array factor pattern of self-scalable hexagonal array (Stage 3) .................22 1.12 The array factor pattern of self-scalable hexagonal array (Stage 4) .................23 1.13 The array factor pattern of self-scalable hexagonal array (Stage 5) .................25 1.14 Figure to show representation of array factor for 2-D (Planar) arrays in terms of nx and ny ..........................................................................................27 1.15 Figure to show representation of array factor for 3-D arrays in terms
of nx, ny and nz ...................................................................................................29 2.1 5-element ring subarray generator ....................................................................30 2.2 Geometry relating expansion ratio δ and dmin for a pentagon subarray generator............................................................................................31 2.3 Self-scalable pentagonal antenna array.............................................................33

xi
2.4 Array factor plot for self-scalable pentagonal array at stage 3 .........................34 2.5 Array factor of the self-scalable stage 3 pentagonal antenna array at stage 3 with minimum spacings of 0.5λ (dashed curve) and λ (solid curve) at °= 0ϕ ....................................................................................35 2.6 5-element subarray generator modified by inserting an element at the center......................................................................36 2.7 Self-scalable pentagonal array whose subarray generator is
modified by inserting one element at the center ..............................................37
2.8 Array factor plots for self-scalable pentagonal array at stage 3 modified by inserting an element at the center of the generator......................39
2.9 The array factor of the stage 3 modified self–scalable pentagonal
array for minimum element spacings 0.5λ (dashed curve) and λ (solid curve) at ϕ = 0° ............................................................................40
2.10 8-element ring subarray generator ...................................................................41 2.11 Geometry relating to expansion ratio δ and dmin
for an octagonal subarray generator.................................................................41 2.12 Self-scalable octagonal antenna array..............................................................43 2.13 Array factor plots for self-scalable octagonal array at stage 3.........................44 2.14 Array factor of self-scalable stage 3 octagonal antenna array with minimum spacing of 0.5λ (dashed curve) and λ (solid curve) at ϕ = 0° ..................................................................................45 2.15 Self-scalable octagonal array whose subarray generator is modified by inserting an element at the center ............................................47 2.16 Array factor plots for self-scalable octagonal array at stage 3 inserting an element at the center of the generator ..........................................48
2.17 Array factor of self–scalable octagonal array at stage 3 with minimum spacings of 0.5λ (dashed curve) and λ (solid curve) modified by inserting an element at ϕ = 0°.............................49 2.18 Stage 3 honeycomb fractal array......................................................................51

xii
2.19 Plot of normalized array factor of the stage 3 honey comb fractal array with dmin = λ ............................................................................................52 2.20 Plot of array factor of the stage 3 honeycomb array sliced at ϕ = 0° for dmin = 0.5λ (dashed curve) and dmin = λ (solid curve) ....................52 4.1(a) Initiator of the Peano curve..............................................................................62 4.1(b) Generator for the horizontal generating line....................................................63 4.1(c) Generator for the vertical generating line ........................................................64 4.2(a) Peano curve (at stage 1) ...................................................................................65 4.2(b) Peano curve (at stage 2) ..................................................................................66 4.3 Initiator element of the Peano curve array.......................................................67 4.4 Subarray generator of the Peano curve array...................................................67
4.5 Figure to illustrate fp,11(θ,φ) and fp,21(θ,φ) ........................................................69
4.6(a) Construction of the Peano fractal array (at step 1) ..........................................74 4.6(b) Construction of the Peano fractal array (at step 2) .........................................74
4.6(c) Construction of the Peano fractal array (at step 3) ..........................................75 4.6(d) Construction of the Stage 2 Peano fractal array (at step 4)..............................75 4.7(a) Peano fractal array (at stage 1).........................................................................76 4.7(b) Peano fractal array (at stage 2).........................................................................77 4.8 Plot of normalized array factor for a stage 3 Peano fractal array with minimum spacing dmin = λ with respect to nx and ny ...............................................78 4.9 Normalized array factor of the Peano curve array at °= 0ϕ , stage 3, dmin = 0.5λ (dashed curve) and dmin = λ (solid curve) ........................79 4.10(a) Initiator of Sierpinski dragon ...........................................................................80 4.10(b) Stage 1 Sierpinski dragon curve, generator is shown by solid curve, whereas the dashed line represents the initiator ...........................80

xiii
4.10(c) Construction of the Sierpinski dragon curve (stage 2).....................................80 4.11 Sierpinski dragon .............................................................................................81 4.12(a) The stage 3 Sierpinski dragon array.................................................................85 4.12(b) The stage 5 Sierpinski dragon array.................................................................85 4.13 Plot of the normalized Sierpinski dragon array factor at stage 5 with dmin = λ with respect to nx and ny...................................................................86 4.14 Plot of stage 3 Sierpinski dragon normalized array factor for ϕ = 0° with minimum spacings of dmin = λ (solid curve) and dmin = 0.5λ (dashed curve) ........................................................................87 4.15 Plot of stage 5 Sierpinski dragon normalized array factor for ϕ = 0° for minimum spacings of dmin = λ (solid curve) and dmin = 0.5λ (dashed curve) ...............................................................................88 5.1 The Peano-Gosper curve initiator ....................................................................90 5.2 The Peano-Gosper curve generator..................................................................91 5.3 The first three stages in the construction of a self-avoiding Peano-Gosper curve. The initiator is shown as the dashed line superimposed on the stage 1 generator. The generator (unscaled) is shown again in (b) as the dashed curve superimposed on the Stage 2 Peano-Gosper curve ..........................................92 5.4 Gosper islands and their corresponding Peano-Gosper curves for (a) stage 1, b) stage 2, and (c) stage 4 ........................................................93 5.5 Element locations and associated current distribution for Stages 1-3 Peano-Gosper fractal arrays with minimum spacing between elements and expansion factor denoted by mind and ,δ respectively. Note that the spacing mind between consecutive array elements along the Peano-Gosper curve is assumed to be the same for each stage .................................................................................94 5.6 Generating elements with n = 1 to n = 7 are located along the stage 1 Peano-Gosper curve.............................................................................95

xiv
5.7 Plots of the normalized stage 3 Peano-Gosper fractal array factor versus θ for ϕ = 0°. The dashed curve represents the case where 2/min λ=d and the solid curve represents the case where λ=mind .................................................................................101 5.8 Plots of the normalized stage 3 Peano-Gosper fractal array factor versus θ for ϕ = 90°. The dashed curve represents the case where 2/min λ=d and the solid curve represents the case where λ=mind ..............................................................................................102 5.9 Plot of the normalized stage 3 Peano-Gosper fractal array factor versus ϕ for θ = 90° and dmin = λ .......................................................102 5.10 Plot of the normalized stage 3 Peano-Gosper curve fractal array factor as a function of nx = sin θ cosϕ and ny = sin θ sin ϕ with dmin = λ .......................................................................103 5.11 Plot to show maximum allowable angle (θmax) versus minimum spacing between adjacent elements dmin in λ for the stage 3 Peano-Gosper fractal array ............................................................................104 5.12 Plot of the normalized stage 3 Peano-Gosper fractal array factor versus θ for ϕ = 26° and dmin = λ .................................................................105 5.13 Plots of the normalized array factor versus θ with ϕ = 0° for a uniformly excited 19x19 periodic square array. The dashed curve represents the case where 2/min λ=d and the solid curve represents the case where λ=mind ................................106 5.14 Plots of the normalized array factor versus θ with ϕ = 0° and λ2min =d for a stage 3 Peano-Gosper fractal array (solid curve) and a uniformly excited 19x19 square array (dashed curve).......................................................................................106 5.15 Plots of the normalized array factor versus θ for ϕ = 0° with mainbeam steered to θo = 45° and ϕo = 0°. The solid curve represents the radiation pattern of a stage 3 Peano-Gosper fractal array with 2/min λ=d and the dashed curve represents the radiation pattern of a uniformly excited 19x19 square array with 2/min λ=d ............................................................................................111

xv
5.16 Modular architecture of the Peano-Gosper array based on the tiling of Gosper islands. A stage 2 and stage 4 Peano-Gosper array are shown divided up into seven stage 1 and stage 3 Peano-Gosper sub-arrays respectively...........................................................112 6.1(a) Initiator for a terdragon curve ........................................................................114 6.1(b) Construction of a stage 1 terdragon curve. The solid curve denotes the generator whereas the dashed curve denotes the initiator...........114
6.1(c) Construction of a stage 2 terdragon curve. The solid curve denotes the generator for the terdragon curve or the stage 2 terdragon curve whereas the dashed curve denotes the stage 1 terdragon curve ..............................................................................................115
6.2 Stage 6 terdragon curve .................................................................................115 6.3 The first stage in the construction of a 6-terdragon. The initiator is shown as the dashed line superimposed on the stage 1 generator.............116 6.4 Stage 3 6-terdragon........................................................................................116 6.5 Element locations and associated current distribution for the stage 1, stage 3, and stage 6 terdragon fractal arrays with the minimum spacing between elements and expansion factor denoted by dmin and δ, respectively. dmin is assumed to be the same for each stage ........................................................................................117 6.6 Element locations and associated current distribution for the stage 1, stage 2 and stage 3 6-terdragon fractal arrays with the minimum spacing between elements and expansion factor denoted by dmin and δ respectively. dmin is assumed to be the same for each stage ...............................................121 6.7 Plot of the normalized array factor for the stage 6 terdragon fractal array factor with minimum spacing dmin = λ in terms of nx and ny ..........................................................................................................................................122 6.8 Plot of the normalized array factor of the stage 6 terdragon fractal array with minimum spacing dmin = λ in terms of nx and ny .........................................................................................................................................................123 6.9 Plot of the normalized array factor for the stage 3 6-terdragon fractal array factor with minimum spacing dmin = λ in terms of nx and ny .........................................................................................................................................................124

xvi
6.10 Plot of the normalized array factor of the stage 3 6-terdragon fractal array with minimum spacing dmin (0.5λ ≤ dmin ≤ λ) ............................125 6.11 Plot of the normalized stage 6 terdragon fractal array factor versus θ for ϕ = 0° for dmin = λ/2 (dashed curve) and dmin = λ (solid curve) ...............................................................................126 6.12 Plot of the normalized stage 6 terdragon fractal array factor versus θ for ϕ = 90° for dmin = λ/2 (dashed curve) and dmin = λ (solid curve) ...............................................................................126
6.13 Plot of the normalized stage 3 6-terdragon fractal array factor versus θ for ϕ = 0° for dmin = λ/2 (dashed curve) and dmin = λ (solid curve) ...............................................................................127 6.14 Plot of the normalized stage 3 6-terdragon fractal array factor versus θ for ϕ = 90° for dmin = λ/2 (dashed curve) and dmin = λ (solid curve) ...............................................................................127 6.15 Plot of the normalized stage 6 terdragon fractal array factor versus ϕ for θ = 90° and dmin = λ ................................................................128 6.16 Plot of normalized stage 3 6-terdragon fractal array factor versus ϕ for θ = 90° and dmin = λ ................................................................129 6.17 Plot of the normalized stage 6 terdragon fractal array factor versus θ for ϕ = 97° .......................................................................................129 6.18 Plots of the normalized stage 3 6-Terdragon fractal array factor versus θ for ϕ = 11° ............................................................................130 6.19 Plot of the normalized array factor versus θ at ϕ = 0° for a uniformly excited 18x18 periodic square array for dmin = λ/2 (dashed curve) and dmin = λ (solid curve)....................................131
6.20 Plot of the normalized array factor versus θ with ϕ = 0° for a uniformly excited 9x9 periodic square array for dmin = λ/2 (dashed curve) and dmin = λ (solid curve)....................................131

xvii
6.21 Plot of the normalized array factor versus θ with ϕ = 0° with dmin = 2λ for the stage 6 terdragon fractal array (solid curve) and a uniformly excited 18x18 square array (dashed curve).......................................................................................133 6.22 Plot of the normalized array factor versus θ for ϕ = 0° and dmin = 2λ for stage 3 6-terdragon fractal array (solid curve) and a uniformly excited 18x18 square array (dashed curve) .........................133 6.23 Plots of the normalized array factor versus θ for ϕ = 0° and dmin = λ/2 with mainbeam steered to θo = 45° and ϕo = 0°. The solid curve represents the radiation pattern of a stage 6 terdragon fractal array, and the dashed curve represents the radiation pattern of a uniformly excited 18x18 square array.........................138 6.24 Plots of the normalized array factor versus θ for ϕ = 0° and dmin = λ/2 with mainbeam steered to θo = 45° and ϕo = 0°. The solid curve represents the radiation pattern of a stage 3 6-terdragon fractal array, and the dashed curve represents the radiation pattern of a uniformly excited 9x9 square array .......................138 7.1 Rectangular coordinates (xn,yn,zn) and cylindrical coordinates ( )nnn z,,ϕρ and projection plane in the direction of ϕ = ϕo and θ = θo ..............141 7.2 Projection plane and the cylindrical coordinate system.................................144 8.1 Fractal spherical array initiator (stage 0) .......................................................149 8.2 Fractal spherical array (stage 1).....................................................................150 8.3 Menger sponge subarray generator, where each individual element is represented by a cube ...................................................................152 8.4 Subarray generator of Menger sponge arrays where each individual element is denoted by an “• ”. The minimum spacing between elements is dmin......................................................................................................153 8.5 Stage 2 Menger sponge (3-D Sierpinski carpet) array where an individual element is located at the center of each cube ................154 8.6 Top view of the stage 2 Menger sponge array in terms of minimum interelement spacing dmin.........................................................................................154
8.7 Front view of the stage 2 Menger sponge array, in terms of minimum interelement spacing dmin.........................................................................................155

xviii
8.8 Auxiliary view of the stage 2 Menger sponge array, in terms of interelement spacing dmin. The z′ -axis is oriented to the
direction of °= 45θ and °= 0ϕ . The scale is expressed in terms of dmin ......................................................................................................................................................155
8.9 Plot of the normalized array factor for the stage 2 Menger sponge array with minimum spacing of dmin = λ where mainbeam is steered to the direction of °== 0oθθ and °== 0oϕϕ .............................................156
8.10 Plot of the normalized array factor sliced at ϕ = 0º for the stage 2 Menger sponge array with minimum spacing of dmin = λ where mainbeam is steered to the direction of
°== 0oθθ and °== 0oϕϕ ...........................................................................157 8.11 Plot of the normalized array factor for the stage 2 Menger Sponge Array with minimum spacing of dmin = λ where mainbeam is steered to the direction of °== 45oθθ and °== 0oϕϕ . The horizontal and vertical axes denote xn and yn , respectively,
where 1222 =++ zyx nnn ..................................................................................158
8.12 Plot of the normalized array factor for the stage 2 Menger Sponge Array with minimum spacing of dmin = λ where mainbeam is steered to the direction of °== 45oθθ and °== 0oϕϕ ...........................159 8.13 Stage 1 of the 3-D Sierpinski gasket contains 4 tetrahedrons; each of which represents an individual element located at the center ....................................................................................................160 8.14 Subarray generators of the Sierpinski gasket array........................................160 8.15 Determining minimum spacing dmin of the subarray generators [63] ............161 8.16 Stage 3 3-D Sierpinski gasket ........................................................................162 8.17 Top view of the stage 3 3-D Sierpinski gasket array, scaled in terms of minimum interelement spacing dmin ........................................................................163
8.18 Front view of the stage 3 3-D Sierpinski gasket array, scaled in terms of minimum interelement spacing dmin...................................................163 8.19 Auxiliary view of the stage 3 3-D Sierpinski gasket array, in terms of minimum interelement spacing dmin. The z′ -axis is directed to the direction of °= 45θ and °= 0ϕ .....................164

xix
8.20 Plot of the normalized array factor for the stage 3 3-D Sierpinski gasket array with minimum spacing of dmin = λ/2 where the mainbeam is steered to the direction of °== 0oθθ and °== 0oϕϕ . The horizontal and vertical axes denote xn′ and yn′ , respectively, where 1222 =′+′+′ zyx nnn .........165
8.21 Plot of the normalized array factor sliced at ϕ = 0º of the stage 3 3-D Sierpinski gasket array with minimum spacing of dmin = λ/2 where mainbeam is steered to the direction of °== 0oθθ and °== 0oϕϕ ..........................................................................166 8.22 Plot of the normalized array factor of the stage 3 3-D Sierpinski
gasket array with minimum spacing of dmin = λ/2 where mainbeam is steered to the direction of °== 45oθθ and °== 0oϕϕ . The horizontal and vertical axes denote xn and yn , respectively, where
1222 =++ zyx nnn .............................................................................................167
8.23 Plot of the normalized array factor sliced at ϕ = 0° of the stage 3 3-D Sierpinski gasket array with minimum spacing of dmin = λ where mainbeam is steered to the direction of
°== 45oθθ and °== 0oϕϕ .........................................................................168

xx
ACKNOWLEDGEMENTS
I wish to express my appreciation to my advisor, Associate Professor Douglas H.
Werner of The Pennsylvania State University, for his guidance during the course of my
research.
I wish to thank Raj Mittra, James K. Breakall, Pingjuan L. Werner and Brian
Weiner for serving on my doctoral committee and for their suggestions.
In addition, I wish to thank my fellow students in the Electrical Engineering
Department who were willing to help in many ways.
I acknowledge and thank Deborah Zimmerman, Melissa Stark and Bonnie King
for helping prepare this document, and Surapong Lertrattanapanich for helping produce
figures that appear in this document.
Finally, my dissertation would not have been possible without the dedicated
support of my family and friends. First and foremost, I must thank my parents, Vibulya
and Raweporn Kuhirun.

1
Chapter 1
Background
The term “fractal”, originally coined by Mandelbrot [1], means broken or
irregular fragments. For fractals that have the property known as “self-similarity”, parts
of their structure are similar to the whole in some way [2]. The concept of fractal
geometry was originated to describe complex shapes in nature that cannot be easily
characterized using classical Euclidean geometry.
Concepts based on fractal geometry have been finding an increasing number of
uses in engineering and science [3]-[10]. For example, fractal electrodynamics
represents the rapidly growing field of research which combines electromagnetic
theory with fractal geometry. The goal of fractal electrodynamics is to study the
radiation, scattering, propagation and guiding of electromagnetic waves by multiscale
structures.
Several case studies of radiation and scattering phenomena have shown that the
fractal dimension of a scattering body was encoded in an easily decipherable way.
These studies showed the possibility that such phenomena might be characteristic of a
large class of fractal structures illuminated by electromagnetic waves. This early work
led to speculation that fractal electrodynamics techniques might have useful
applications in remote sensing.
Some of the earliest research in the area of fractal electrodynamics was carried
out by Berry [11] [12] who introduced the term diffractals, and by Jakeman [13]-[16]
who studied scattering from fractal surfaces and slopes. Berry [11] investigated the

2
behavior of waves encountering fractal structures, known as “diffractals”. In particular,
the effect of the echo power’s time delay from the reflection of a quasi-monochromatic
outgoing pulse by a multiscale random surface was considered in [11]. In addition,
initial studies of diffraction by fractal objects and apertures were discussed in [17]-
[27]. Allain et al. [17] investigated optical Fourier transforms of fractals, and optical
diffraction from fractals [18].
Certain fractal structures appear to be good candidates for efficient small
antennas due to their special geometrical features. In 1995, Cohen showed some
numerical calculations on large perimeter fractal loops and dipoles [28]-[31], providing
evidence that such small antennas might feature a low resonance frequency with a
relatively large input resistance. Cohen [38] investigated fractally shaped Minkowski
island loop antennas known as Minkowski island quads. This study was further
discussed in [29] and [31]. Moreover, Cohen [30] studied fractally shaped dipoles,
known as Cohen dipoles. The study of Cohen dipoles was further discussed in [31].
Puente et al. [32], [33] showed that, by fractally shaping small monopoles, an
improvement in the performance with respect to other classical Euclidean antennas
could be achieved. A design approach for a multiband Sierpinski gasket fractal
monopole was introduced in further variations on this design for monopole and dipole
antennas. The variations are considered in [35]. Not only can the use of fractal antennas
be implemented in the form of monopoles and dipoles, but they can also be
implemented as microstrip patch antennas, which has been demonstrated by Romeu et
al. [36], [37].
3
Puente [38] also investigated the impact of the Sierpinski antenna’s spacing
perturbation on operating bands and studied the multiband properties of a fractal tree
antenna whose structure is generated randomly by a technique known as
electrochemical deposition [39]. A deposit was grown from a layer of electrolyte
placed between two plates. Once the process had been completed, an image was taken
with a CCD camera and printed, using standard printed circuit techniques. Later,
Puente [40] developed an iterative model for fractal antennas which was applied in
particular to the Sierpinski gasket antenna to predict its performance as a function of
flare angle, comparing the measured experimental data obtained from the model.
Kim and Jaggard [41] reported the first application of fractals to the design of
low sidelobe arrays based on the theory of random fractals. The time-harmonic and
time-dependent radiation by bifractal dipole arrays was discussed in [42]. Lakhtakia et
al. [43] showed that the diffracted field of a self-similar screen is also self-similar,
based on results obtained using a particular fractal screen constructed from a Sierpinski
carpet. Werner and Werner [44] showed that self-scaling arrays can produce fractal
radiation patterns by studying the property of a nonuniform linear array, the so-called
Wierstrass array, and [8] showed how a radiation pattern synthesis technique could be
developed for Wierstrass arrays. Later, Liang et al. [45] extended this work to the case
of concentric ring arrays, and developed a synthesis technique for fractal radiation
patterns from concentric ring arrays was developed. The design of Koch arrays and
low sidelobe Cantor arrays was discussed in [4]. The size of Koch arrays was reduced
by El-Khamy [46], using windowing and quantization techniques. Haupt and Werner

4
[3] have shown that a fractal array can be generated by applying a repeated operation
on linear as well as planar subarrays.
Kuhirun [47] has demonstrated that fractal arrays can also be generated by
applying a repeated operation on circular and concentric ring subarrays. Later, Werner
et al., [48], [49] considered a more in-depth study of fractal arrays generated by
applying a repeated operation on circular and concentric ring subarrays. Baharav [50]
proposed an alternative way to generate fractal arrays, i.e., uniformly spaced arrays
with fractally distributed excitations. For the purpose of this work, we will consider
various extensions to the concept of generating fractal arrays through a repeated
operation on circular and concentric ring subarrays, multiple subarray generators and
concentric sphere subarray generators.
1.1 Fractal Arrays Using Circular and Concentric Ring Subarray Generators
This section contains a brief discussion of fractal arrays generated by using
circular and concentric ring subarrays [47-49]. Let us consider a circular and/or
concentric ring subarray generator and assume that all elements of the subarray are
isotropic. Under these conditions, an expression can be derived for the electric field
intensity in the far field for the concentric ring array shown in Figure 1.1 [51]. The
array factor AF(θ,ϕ) associated with the far-zone electric field intensity of the M-
concentric ring array with N elements in each individual ring shown in Figure 1.1, can
be expressed in the form [51].
∑∑= =
+−=M
m
N
nmnnmmn jjkrIAF
1 1
])cos(sinexp[),( βϕϕθϕθ (1.1)

5
where θ, ϕ are the far-zone field point angles, ϕn is the azimuthal angle associated
with the nth element of each individual ring, and rm is the radius of the mth ring shown
in Figure 1.1. An example of a subarray generator which consists of M-concentric ring
arrays each containing four elements (indicated by X’s) is illustrated in Figure 1.2(a).
The array factor given in Equation (1.1) can be applied to a generalized fractal ring
array, but the array factor is rather complicated to analyze. For simplicity, we first
Figure 1.1 Geometry for an M-ring subarray generator where each ring has a total of N elements. The location of the mnth element is shown.
(r,ϕ,θ)
θ
ϕ
(rm,ϕmn,θmn)
z
y
x
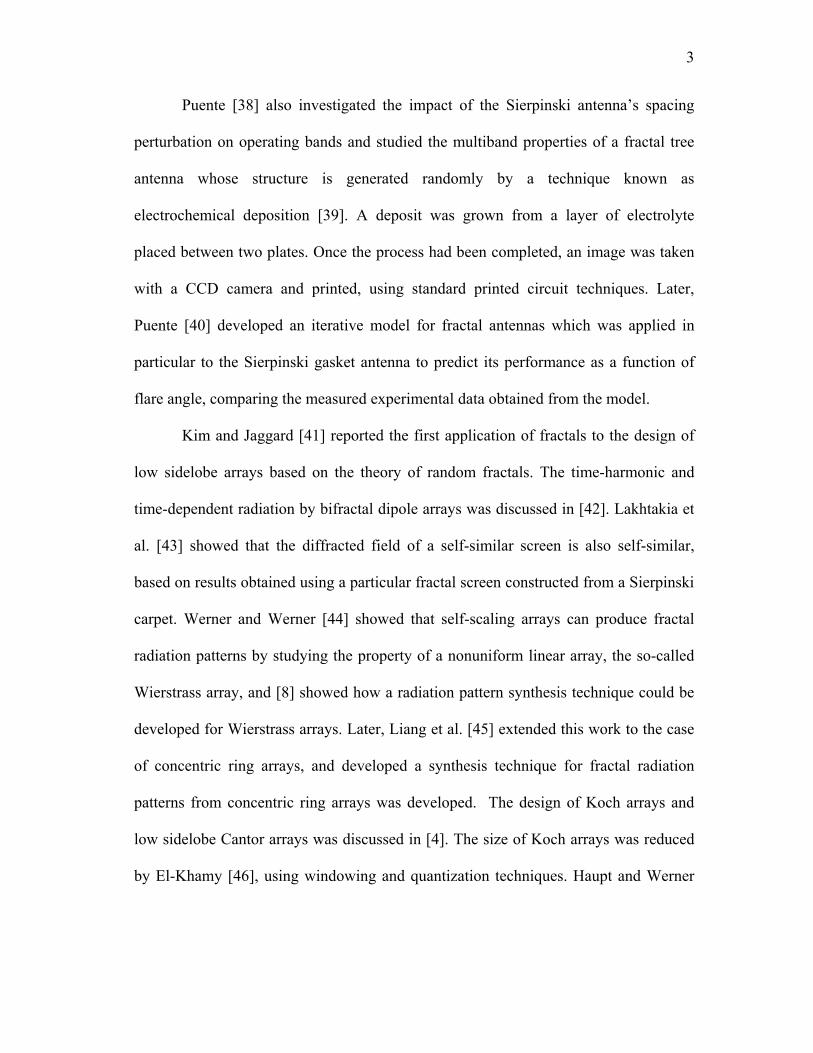
6
consider only the case of a generator consisting of a single, N-element circular array.
Thus, if M = 1, the parameters Imn, βmn, and rm will reduce to In, βn, and r, respectively.
The array factor for the ring array in this case reduces to
])(cossin[exp),(1
nn
N
nn jθjkrIAF βϕϕϕθ +−= ∑
=
(1.2)
The generator for this simplest case is shown in Figure 1.2(b). Each “X”
represents an element of the ring array.
(a) An M-ring subarray generator
(b) A ring subarray generator (M = 1)
Figure 1.2 Ring subarray generators
r1
r
r2
rm

7
Using an algorithm similar to (1.3) in [1], the ring array can be treated as the first stage
of a fractal array. To generate the second stage, the ring array is expanded by a factor
of δ. We then substitute for each antenna element in the expanded array a ring array
identical to that used in the first stage. Thus, we may write
( )( )[ ]∏ ∏= =
−− +Ψ•==2
1
2
1
1112 exp)Ψ()Ψ(
p pnn
pn
p rjIAFAF βδδrrrr
, (1.3)
where
( ) ( ) ( )[ ]( ) ( ) ( )[ ]kjik
kji
ˆcosˆsinsinˆcossin
ˆcosˆsinsinˆcossin2Ψ
θϕθϕθ
θϕθϕθλπ
++=
++=r
(1.4)
and ),Ψ(1
rAF the array factor of the generator (stage 1) in (1.5), can be expressed in
terms of θ and ϕ by
( ) ])(cossin[exp),(),(1
11 nn
N
nn jθjkrIAFAFAF βϕϕϕθϕθ +−===Ψ ∑
=
r (1.5)
This recursive algorithm can be generalized to stage P as
( )( )( )∏ ∏ ∑= = =
−−
+−==P
p
P
p
N
nnn
pn
pP krjIAFAF
1 1 1
111 cossinexp)Ψ()Ψ( βϕϕθδδ
rr (1.6)
By following an analysis identical to that presented in [3], it can be shown that (1.6)
has the highly desirable property of the array factor being self-similar with respect to
frequency as P → ∞. In other words, the array factors are self-similar if the frequency
is multiplied by the similarity factor δ as P → ∞.
As in [2], it can be shown that the radiation characteristics of fractal array
structures are a log-periodic (LP) function of frequency with a log period of δ as
described by (1.7).

8
)Ψ(Ψ(rr
qnormalizednormalized AF)AF δ= (1.7)
This can be interpreted as a frequency shift satisfying (25) in [3]. Thus, if
ff qq δ= (1.8)
where q is an integer, and f is the frequency associated with Ψr
in (1.7), then the array
factor at both frequencies qf and f are equal.
So far, the ideal case where the array has an infinite number of elements has
been discussed. However, all practical arrays have a finite number of elements because
arrays containing an infinite number of elements cannot be constructed in practice.
Equations (1.7) and (1.8) are no longer exact for truncated arrays. However, the array
factor for an ideal fractal antenna array can be approximated by that of a truncated
fractal antenna array. Depending on the generators and the expansion ratio δ, a wide
variety of patterns for fractal antenna arrays can be generated. Several of these patterns
are briefly discussed in the next two sections.
1.1.1 Sierpinski Gasket Array Pattern
Named after Sierpinski, a famous Polish mathematician, the Sierpinski gasket is
one of the basic and most commonly found patterns of fractal geometry [6]. The
Sierpinski Gasket can be constructed through the following four stages.
We start with a blackened, “filled-in” triangle and repeat steps of operation by
first dividing the blackened, “filled-in” triangle into four smaller blackened, “filled-in”
triangles and then, removing the middle triangle as shown in Figure 1.3(a). This is

9
stage 1. We can repeat these steps of operations infinitely to the remaining blackened,
“filled-in” triangles at further stages in the way shown in Figure 1.3(b), (c), and (d).
(a) Stage 1 (b) Stage 2
(c) Stage3 (d) Stage 4
Figure 1.3 Sierpinski gasket
A Sierpinski gasket antenna array can be made using an equilateral triangular
ring array as a generator, with an expansion factor of δ = 2. Several stages in the
growth of the Sierpinski gasket fractal antenna array are shown in Figure 1.4. For
simplicity, assume that all elements on the subarray generator are isotropic, equally

10
excited, and in phase with each other, more precisely speaking, In = 1 and βn = 0 for all
values of n.
Comparing Figure 1.3(a), (b), (c), and (d) to the corresponding Figure 1.4(a),
(b), (c), and (d), respectively, it follows that each element of the array shown in Figure
1.4 can be represented by the corresponding blackened, “filled in” triangle in Figure
1.3. Each element is located at the centroid of the corresponding blackened triangle.
Thus, this configuration is reasonably named the Sierpinski gasket antenna array.
(a) Stage 1 (P = 1) (b) Stage 2 (P = 2)
(c) Stage3 (P = 3) (d) Stage 4 (P = 4)
Figure 1.4 Various stages of growth for the Sierpinski gasket array

11
If we let δ = 2 with three elements in the generator, then (1.6) can be used to
find an expression for the array factor of the pattern, which is given by:
)Ψ2()Ψ( 11
1
rr−
=Π= p
P
pP AFAF (1.9)
If we let In = 1, βn = 0 and N = 3, we can write (1.6) as:
)]3
)1(2(cossin2[exp),( 1
3
1
1∏ ∑= =
−
−−=P
p n
pP
πnθrjkAF ϕϕθ (1.10)
The array factor pattern at ϕ = °0 is shown in Figure 1.5 and Figure 1.6 for various
stages of growth with kr = 3 and kr = 1.5, respectively.
0 10 20 30 40 50 60 70 80 90 100-30
-25
-20
-15
-10
-5
0
theta (degrees)
Mag
nitu
de (d
B)
(a) Stage 1

12
0 10 20 30 40 50 60 70 80 90 100 -30
-25
-20
-15
-10
-5
0
theta (degrees)
Mag
nitu
de (d
B)
(b) Stage 3
0 10 20 30 40 50 60 70 80 90 100 -30
-25
-20
-15
-10
-5
0
theta (degrees)
Mag
nitu
de (d
B)
(c) Stage 5
Figure 1.5 Plot of the Sierpinski gasket array factor for various stages of growth with kr = 3

13
0 10 20 30 40 50 60 70 80 90 100-30
-25
-20
-15
-10
-5
0
theta (degrees)
Mag
nitu
de (d
B)
(a) Stage 1
0
10 20 30
40 50 60 70 80 90
100 -30
-25
-20
-15
-10
-5
0
theta (degrees)
Mag
nitu
de (d
B)
(b) Stage 3

14
(c) Stage 5
Figure 1.6 Plot of the Sierpinski gasket array factor for various stages of growth with kr = 1.5
As can be seen from Figure 1.5 and Figure 1.6, the array factors at kr = 3 and 1.5 tend
to converge to each other as P increases. This agrees with (1.7), meaning that the array
factor of a fractal antenna array is repeated every log-period of δ = 2 as in this
particular case.
1.1.2 Self-Scalable Hexagonal Array Pattern
The self-scalable hexagonal array is generated by an equilateral hexagonal
subarray with an expansion ratio δ = 2. The geometry of the array is shown in Figure
1.7.
0 20 40 60 80 100-30
-25
-20
-15
-10
-5
0
theta (degrees)
Mag
nitu
de (d
B)

15
(a) Stage 1 (b) Stage 2
(c) Stage 3
Figure 1.7 Self-scalable hexagonal antenna array
1
1
1
1
1
1
2
2
1
1
1
1
1
1
2
2
1
1
1
1
1
1
2
2
1
1
1
1
1
11
1
1
1
1
1
11
1
1
1
1
2
2
1
1
1
1
1
2
1
1
2
1
1
3
3
1
1
2
3
2
2
3
2
1
1
1
1
1
1
2
3
3
2
1
1
2
3
3
2
1
1
1
2
2
1
1
1
2
1
2
1
3
3
1
1
3
3
1
2
2
2
2
1
3
3
1
1
3
3
1
2
1
2
1
1
1
2
2
1
1
1
2
3
3
2
1
1
2
3
3
2
1
1
1
1
1
1
2
3
2
2
3
2
1
1
3
3
1
1
2
1
1
2
1
1
1
1
1
2
2
1
1
1
1
11

16
Each of these arrays could also be represented by the scheme illustrated in Figure 1.8,
with elements located on the vertices of each of the hexagons.
(a) Stage 1 (b) Stage 2
(c) Stage 3
Figure 1.8 Figures representing the self-scalable hexagonal antenna array

17
With an appropriate choice of δ = 2, there are some “fictitious” elements which
have other elements stacked on top of them. The number of elements, which are
stacked upon each other at various stages, is shown in Figure 1.7. In reality, each stack
of elements can be represented by a single element; thus the number of physical
elements can be reduced considerably compared with the number of generated or
fictitious elements.
We next consider the array factor characteristics for the self-scalable hexagonal
array. The array factor for a fractal array at stage P (P = 1,2,3,4,5) is given in (1.6),
where
∑=
−−=6
11 )]
6)1(2cos(sinexp[),(
nnjkrAF πϕθϕθ (1.11)
At higher stages, the array factor of the hexagonal array derived from (1.6) and (1.11)
can be represented as:
∏ ∑= =
−
−−=P
p n
pP
πnθrjkδAF1
6
1
1 )]6
)1(2(cossin[exp),( ϕϕθ (1.12)
The array factor given in (1.12) is plotted for the case where °= 0ϕ in Figures 9-13.

18
0 10 20 30 40 50 60 70 80 90 -60
-50
-40
-30
-20
-10
0
theta (degrees)
Mag
nitu
de (d
B)
(a) kr = 6
0 10 20 30 40 50 60 70 80 90 -60
-50
-40
-30
-20
-10
0
theta(degrees)
Mag
nitu
de (d
B)
(b) kr = 3

19
0 10 20 30 40 50 60 70 80 90 -60
-50
-40
-30
-20
-10
0
theta (degrees)
Mag
nitu
de (d
B)
(c) kr = 1.5
Figure 1.9 The array factor pattern of a self-scalable hexagonal array (Stage 1)
0 10 20 30 40 50 60 70 80 90 100-60
-50
-40
-30
-20
-10
0
theta (degrees)
Mag
nitu
de (d
B)
(a) kr = 6

20
0 10 20 30 40 50 60 70 80 90
100 -60
-50
-40
-30
-20
-10
0
theta (degrees)
Mag
nitu
de (d
B)
(b) kr = 3
0 10 20 30 40 50 60 70 80 90 100 -60
-50
-40
-30
-20
-10
0
theta (degrees)
Mag
nitu
de (d
B)
(c) kr = 1.5
Figure 1.10 The array factor pattern of a self-scalable hexagonal array (Stage 2)

21
0 10 20 30 40 50 60 70 80 90 100 -60
-50
-40
-30
-20
-10
0
theta (degrees)
Mag
nitu
de (d
B)
(a) kr = 6
0 10 20 30 40 50 60 70 80 90 100 -60
-50
-40
-30
-20
-10
0
theta (degrees)
Mag
nitu
de (d
B)
(b) kr = 3

22
0 10 20 30 40 50 60 70 80 90 100 -60
-50
-40
-30
-20
-10
0
theta (degrees)
Mag
nitu
de (d
B)
(c) kr = 1.5
Figure 1.11 The array factor pattern of a self-scalable hexagonal array (Stage 3)
0 10 20 30 40 50 60 70 80 90 100 -80
-70
-60
-50
-40
-30
-20
-10
0
theta (degrees)
Mag
nitu
de (d
B)
(a) kr = 6

23
0 10 20 30 40 50 60 70 80 90 100-80
-70
-60
-50
-40
-30
-20
-10
0
theta (degrees)
Mag
nitu
de (d
B)
(b) kr = 3
0 10 20 30 40 50 60 70 80 90 100 -80
-70
-60
-50
-40
-30
-20
-10
0
theta (degrees)
Mag
nitu
de(d
B)
(c) kr = 1.5
Figure 1.12 The array factor pattern of a self-scalable hexagonal array (Stage 4)

24
0 10 20 30 40 50 60 70 80 90 100 -80
-70
-60
-50
-40
-30
-20
-10
0
theta (degrees)
Mag
nitu
de (d
B)
(a) kr = 6
0 10 20 30 40 50 60 70 80 90 100-80
-70
-60
-50
-40
-30
-20
-10
0
theta (degrees)
Mag
nitu
de (d
B)
(b) kr = 3

25
0 10 20 30 40 50 60 70 80 90 100-80
-70
-60
-50
-40
-30
-20
-10
0
theta (degrees)
Mag
nitu
de (d
B)
(c) kr = 1.5
Figure 1.13 The array factor pattern of a self-scalable hexagonal array (Stage 5)
1.2 Some Useful Expressions for the Analysis of Fractal Arrays
This section introduces some mathematical analysis techniques and expressions
that are useful for evaluating the performance of fractal arrays. The results presented
here will be applied to the analysis of fractal arrays throughout this thesis.
1.2.1 Directivity
The directivity of N-element arrays for broadside operation can be determined
by assuming that all individual elements are isotropic. The directivity D for 2-D arrays
may be conveniently expressed in the form (see Appendix for details and derivation):

26
( )( )∑∑∑
∑
=
−
==
=
−
−+
=N
m
m
n mn
mnmn
N
nn
N
nn
rrkrrk
III
ID
2
1
11
2
2
1
sin2 rr
rr (1.13)
and for 3-D arrays
( ) ( )∑∑∑
∑
=
−
==
=
−+−−+−+−
+
=N
m
m
n mn
mnmnmnmnmn
N
nn
N
nn
rrkrrkrrk
III
ID
2
1
11
2
2
1
sinsinrr
rrrr ββββ
(1.14)
where In, nrr and ϕn are the current amplitude excitation, position vector of magnitude rn
and azimuthal angle for the nth element.
1.2.2 Plot of Array Factor in Terms of n or Ψr
The characteristics of the array factor associated with an N- element array of the
form
∑∑==
Ψ•=•=N
nnn
N
nnn rjInrjkInAF
11)exp()ˆexp()ˆ(
rrr (1.15)
can be conveniently illustrated by a plot in terms of n or, more precisely, nx, ny, and nz.
In the case of 2-D arrays, the array factor does not depend on the component nz.
Hence, for this situation, the array factor depends only on nx and ny. The array factor in

27
dB can be represented as a 2-D contour plot. It can be shown (see Appendix A.3) that
the visible region in this case is given by 1≤+ yx nn rr or λπ2
≤Ψ+Ψ yx
rr .
Figure 1.14 Figure to show representation of array factor for 2-D (planar) arrays in terms of nx and ny
Moreover, the polar coordinates ( )ϕρ , are represented by ( )ϕθ ,sin where θ and ϕ are
the vertical and horizontal angles of the far-field point, respectively.
In addition, this representation of the array factor for 2-D arrays not only
illustrates the array factor pattern for a particular minimum spacing dmin, but is also
useful for finding the array factor pattern for various minimum spacings by taking
advantage of the scaling property.
( ) ( )nAFnaAF ˆˆ 21 = (1.16)
nx
ny
(sin θ ,ϕ)

28
where ( )nAF ˆ1 and ( )nAF ˆ2 are the array factors in terms of n with the minimum
spacings dmin = d1 and d2 = ad1, respectively.
By exploiting the translational property, we can calculate the maximum
allowable angle to which the 2-D array can be steered from broadside. To explain the
way in which to calculate the maximum allowable angle θmax, consider a plot of the
array factor in terms of nx and ny. Let us also suppose that the closest high sidelobe
undesirable region is at distance b (1<b<2) away from the origin. Hence, the angle θmax
can be determined by the formula
1sin maxmax−==+ bnn yoxo θ (1.17)
and hence,
( )1arcsinmax −= bθ (1.18)
In the case of 3-D arrays (see Appendix A.4), the array factor depends not only
on nx and ny but also on nz. The visible region is 1ˆ =n or .1=++ zyx nnn rrr It follows
that the spherical coordinates ( )θϕ,,r of the region 1ˆ =n are ( )θϕ,,1 where φ and θ
are the horizontal and vertical angles of the far-field point, respectively. In addition, the
plot of the array factor for a 3-D array can be useful for determining the maximum
allowable angle θmax and array factor pattern for various minimum spacings. However,
the analysis for 3-D arrays is much more complicated than that for 2-D arrays and will
be considered beyond the scope of this thesis. Hence, there is no further discussion on
the analysis using this plot for 3-D arrays.

29
Figure 1.15 Figure to show representation of array factor for 3-D arrays in terms of nx, ny and nz
ny
nz
nx
(1, ϕ, θ )

30
Chapter 2
Fractal Arrays Using Ring Subarray Generators
Associated with the fractal arrays previously discussed, this section presents new
self-scalable pentagonal and octagonal arrays that are generated using 5-element and 8-
element subarray generators respectively. These arrays have the advantage that they can
be recursively generated, allowing development of rapid algorithms for calculating their
radiation patterns. They also possess relatively low sidelobe levels.
2.1 Self-Scalable Pentagonal Arrays
The self-scalable pentagonal array is a fractal array generated by a 5-element ring
subarray generator. Figure 2.1 shows the 5-element ring subarray whose individual
generating elements are located on each of the vertices of a pentagon.
1
1
1
1
1
r
Figure 2.1 5-element ring subarray generator

31
Similar to the case of the self-scalable hexagonal array, the self-scalable pentagonal array
is generated in a way allowing stacking of some of the elements upon each other at
higher stages of growth. Each stack of generated elements can be represented by a single
element. This implementation can reduce the number of real elements, while the current
distribution on the array becomes nonuniform, leading to lower sidelobe levels.
To generate the pentagonal array with a non-uniform current distribution, the
expansion ratio δ is selected in such a way that the generated elements will stack upon
each other. Referring to the geometry shown in Figure 2.2, it follows that:
δrcos 72° + rcos 72° = δr + rcos 144° (2.1)
where
δ = the expansion ratio of the fractal pentagonal antenna array
r = the radius of the 5-element subarray generator
144° 72°
72°
δr
r
dmin
Figure 2.2 Geometry relating expansion ratio δ and dmin for a pentagon subarray generator

32
Consequently, solving (2.1) for δ, yields
δ = 618.172cos1
144 cos-72 cos=
°−°° (2.2)
With this choice of expansion ratio δ, there will be some elements that overlap for higher-
order stages of growth. Each stack of elements could be implemented in practice by using
only one element with excitation current amplitude equal to the sum of the individual
element excitations. The antenna elements shown in Figure 2.3 are represented by dots.
The number adjacent to each element represents the relative excitation current amplitude
on each element.
1
1
1
1
1
1
1 1
1 1
2 1 2
1 2 1
1 2
2 1
1 1 1
1 1
(a) Stage 1 (b) Stage 2

33
1 1 1
2 1 1 1 2 1
1 1 2 1 2 3 2
3 1 13
2 4 1 1 1 4 3 1
3 2 1 2 2 2 2 4 1
1 2 3 2 2 4 1
3 1
2 4 1 1 1 3 3 1 2 3 2
1 1 1 2 1 2 1 1
2 1 1
1 1
(c) Stage 3
Figure 2.3 Self-scalable pentagonal antenna array
The minimum distance, dmin, between two elements can be expressed as follows:
( ) ( )22min 72sin72sin72cos72cos °−°+−°−°+= rrrrrrd δδδ (2.3)
where
dmin = the minimum distance between two consecutive array elements
r = the radius of the 5-element subarray generator.
618.172cos1
144 cos-72 cos=
°−°°
=δ
Figure 2.3 shows the self-scalable pentagonal antenna array for various stages of
growth. The array factor AFP(θ,ϕ) of this array at stage P can be expressed using (1.5)
and (1.6) and plugging in N = 5, as follows:
( )( )[ ]∏ ∑= =
−
−−=P
p n
pP π/nθrjkδθAF
1
5
1
1 521cossinexp),( ϕϕ (2.4)
where θ and ϕ are the standard angles associated with a spherical coordinate system, and
r is the radius of the 5-element subarray generator.
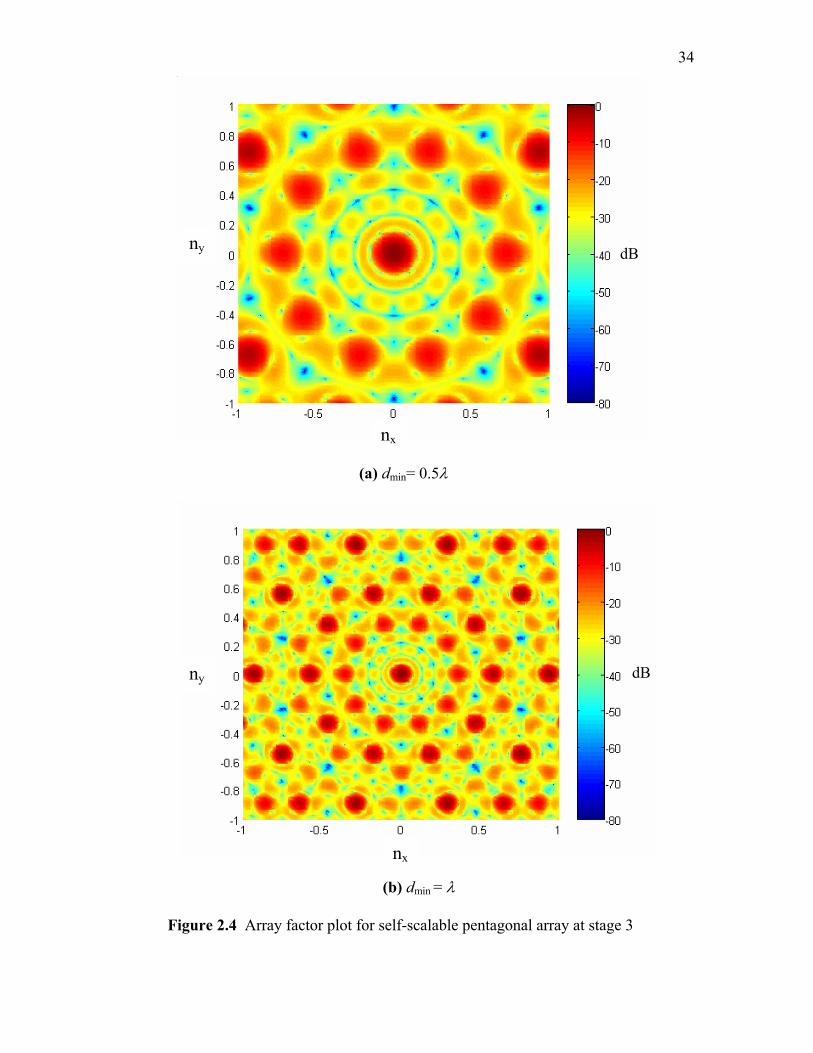
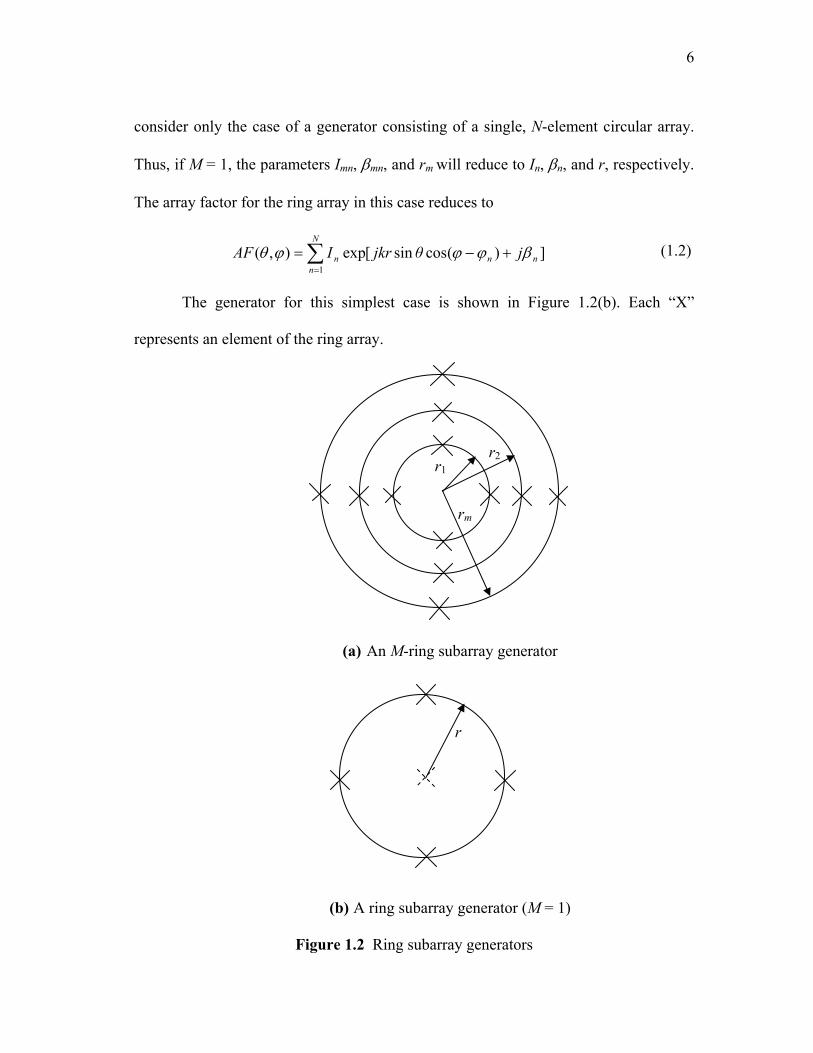
34
(
(a) dmin= 0.5λ
(b) dmin = λ
Figure 2.4 Array factor plot for self-scalable pentagonal array at stage 3
nx
ny
ny
nx
dB
dB

35
Figure 2.4(a) and (b) show contour plots of the self-scalable pentagonal array
factor where the x- and y-axes represent nx and ny, respectively. Figure 2.4(a) illustrates
that, with dmin = 0.5λ, sidelobes are low relative to those for dmin = λ shown in Figure
2.4(b). Figure 2.4(b) shows that, with dmin = λ, grating lobes are in the visible region (the
unit circle centered at the origin). In other words, grating lobes are present when dmin = λ.
Slices of the plot for the array factor versus θ with various minimum spacings, dmin =
0.5λ and dmin = λ at a fixed stage 3 are shown in Figure 2.5.
0 10 20 30 40 50 60 70 80 90-45
-40
-35
-30
-25
-20
-15
-10
-5
0
Theta (degrees)
Arra
y Fa
ctor
(dB
)
Figure 2.5 Array factor of the self-scalable stage 3 pentagonal antenna array at stage 3 with minimum spacings of 0.5λ (dashed curve) and λ (solid curve) at ϕ = 0°
Figure 2.5 shows the array factor of the self-scalable pentagonal antenna array for
stage P = 3 evaluated at °= 0ϕ with minimum spacings of 0.5λ and λ. The array factor

36
for the case where dmin = λ is shown by a solid curve whereas for the case where dmin =
0.5λ it is shown by a dashed curve. This figure indicates for both cases that sidelobe
levels are still relatively high compared to the mainbeam.
The sidelobe level of the stage 3 array factor at ϕ = 0° can be reduced by inserting
an element at the center of the subarray generator. Figure 2.6 shows the geometry for the
5-element pentagonal subarray generator with a sixth element added at the origin.
The fractal array generated by this subarray generator at stages 1, 2, and 3 are
shown in Figure 2.7(a), Figure 2.7(b) and Figure 2.7(c), respectively.
1
1
1
1
1
1
r
Figure 2.6 5-element subarray generator modified by inserting an element at the center

37
1
1
1
1
1
1
1
1 1
1 1 1
1 2 1 1
1 2 1
2 1 1 1 1
1 1 2
1 2 1 1
1 1 1
1 1
1
(a) Stage 1 (b) Stage 2
11
12 1 1
11 1 2 1 1
1 1 1 1 21
1 2 1 3 2 1 1 21 3 1
11
1 1 32 2 1 2 5 1 1 1 1 1
11 5 2 1 2 1 3 1 1
1 3 1 1 2 2 11
21 2
2 2 2 2 1 1 5 2 1 1 11 1 2
1 3 1 1 2 2 1 21 5 2 1 2
11 3 1 1
2 2 1 2 5 1 1 1 1 11 1 1 3
1 3 1 11 2 1 3 2 1 1 2
11 1 1 1 2
1 1 2 1 11
2 1 11
11
(c) Stage 3
Figure 2.7 Self-scalable pentagonal array whose subarray generator is modified by inserting one element at the center
The array factor of the modified self-scalable pentagonal antenna array can be expressed
as:
( )( )[ ]∏ ∑= =
−
−−+=P
p n
pP π/nθrjkδθAF
1
5
1
1 521cossinexp1),( ϕϕ (2.5)

38
The minimum spacing dmin of the modified self-scalable pentagonal antenna array
is:
rd =min (2.6)
This differs from the formula that was derived for the self-scalable pentagonal antenna
array given in (2.3).
(a) dmin = 0.5λ
ny
nx
dB

39
ny
(b) dmin = λ
Figure 2.8 Array factor plots for the self-scalable pentagonal array at stage 3 modified by inserting an element at the center of the generator
By comparison with the unmodified case, the plot of array factor for the self-
scalable pentagonal array modified by inserting an element at the center of the generator,
which is illustrated in Figure 2.8(a), has relatively low sidelobes for the case where dmin =
0.5λ. For the case where dmin = λ, as represented in Figure 2.8(b) the plot still has high
sidelobes in the visible region (in the unit circle centered at the origin). Figure 2.9 shows
the array factor of the modified stage 3 self-scalable pentagonal array at °= 0ϕ . The
figure shows that high sidelobe levels remain present in the case where dmin = λ (solid
nx
dB

40
curve). In the case where dmin = 0.5λ (dashed curve) there are no grating lobes present in
the radiation pattern, as represented in Figure 2.8(a) and Figure 2.9.
0 10 20 30 40 50 60 70 80 90 -45
-40
-35
-30
-25
-20
-15
-10
-5
0
Theta (degrees)
Arra
y Fa
ctor
(dB
)
Figure 2.9 The array factor of the stage 3 modified self–scalable pentagonal array for minimum element spacings 0.5λ (dashed curve) and λ (solid curve) at ϕ = 0°
2.2 Self-Scalable Octagonal Arrays
Similar to the case of the self-scalable pentagonal array, the self-scalable
octagonal array is a fractal array generated by a ring subarray generator. The ring
subarray generator in this case is the 8-element subarray shown in Figure 2.10. It is found
that with a certain expansion ratio δ, there will be some stacking of elements causing the
current distribution on the fractal array to be nonuniform. An expression for the

41
expansion ratio δ can be obtained from the geometry illustrated in Figure 2.11. This
expression is given by
δ = cot (22.5°) (2.7)
1
1
1
1
1
1
1
1
r
Figure 2.10 8-element ring subarray generator
δr
r 22.5°
22.5°
dmin
Figure 2.11 Geometry relating to expansion ratio δ and dmin for an octagonal subarray generator

42
Using the expansion ratio given in (2.7), each stack of generated elements can be
implemented as a single physical element by adjusting the excitation currents in the
appropriate way. Also, the minimum spacing between array elements can be expressed
as:
)sin(22.52min °= rd (2.8)
where
dmin = the minimum spacing between real elements
r = the radius of the 8-element subarray generator.
Figure 2.12 shows the pattern of the self-scalable octagonal antenna array with the
expansion ratio, δ = cot 22.5° for several stages P = 1, 2 and 3. Each real element
location is represented by a dot. The figure also shows the relative excitation current
amplitude associated with each element.
The array factor at stage P for the fractal array shown in Figure 2.12 can be
expressed as follows:
( )( )[ ]∏ ∑= =
−
−−=P
p n
pP πnθrjkδθAF
1
8
1
1 4/1cossinexp),( ϕϕ (2.9)

43
1
1 1
1 1
1 1
1
11 1
11 2
1 2
1
1
2 2 1
2
1
11
2 1 2
1
2
1
1
1
1
2
1
2 1 2
1 1
1
2 1
2 2
1
1
21
2 1 1
1 1 1
(a) Stage 1 (b) Stage 2
11 11 1 1 2 2 11 1 21 21 1 11 1 13 1
112 13 33 13 3 1
22
13 21 2 3
2 2
11
2 1 14 2 44 22 12 24
1 121 1
2 3 3 2 1 3
1 13 3 32 31 33 1
332 1 11
3 214
313 1 21 1 1
13 3
44
33
11 2 11 2
3 1
42 1
313 2 12
3 1 3 2 1
11 1
231
21
1
1 1
2 1
3 2 1
1 1 1
2 3 1 3 2 1
231 3 12
41
3211 21
1 3
3 4
43
3 1 1
1 12 1 313 412
31 1
1233 133 13 23 33
1 13 1
2 3 3 2 1 1 2
1 14 2 21 22 44 2 41
12
1 1
22
3 2 12 3
1 2
21
3 3 1 33 31 211131 111 1 12 12 1 1
1 2 2 11 11 11
(c) Stage 3
Figure 2.12 Self-scalable octagonal antenna array

44
(a) dmin = 0.5λ
(b) dmin = λ
Figure 2.13 Array factor plots for the self-scalable octagonal array at stage 3
ny
nx
ny
nx
dB
dB

45
Figures 2.13(a) and (b) show plots of array factor for the self-scalable octagonal
array at Stage 3 in terms of nx (x-axis) and ny (y-axis). Figures 2.13(a) and (b) illustrate
the array factor plot where dmin = 0.5λ and dmin = λ, respectively. Figure 2.13(a) shows
high sidelobes in the visible region while Figure 2.13(b) shows grating lobes in the
visible region, with the unit circle centered at the origin. The grating lobes are higher than
the large sidelobes shown in Figure 2.13(a). This means that relatively high sidelobes
appear for this array in the both cases where dmin = 0.5λ and dmin = λ.
Figure 2.14 shows plots of the array factor pattern of the self-scalable octagonal
antenna array for stage P = 3 evaluated at ϕ = 0° with the minimum spacings between
elements, dmin, of 0.5λ (dashed curve) and λ (solid curve). The figure confirms that there
is at least one high sidelobe in the latter case.
0 10 20 30 40 50 60 70 80 90-80
-70
-60
-50
-40
-30
-20
-10
0
Theta (degrees)
Arra
y Fa
ctor
(dB
)
Figure 2.14 Array factor of the self-scalable stage 3 octagonal antenna array with minimum spacing of 0.5λ (dashed curve) and λ (solid curve) at ϕ = 0°

46
Similar to the self-scalable pentagonal antenna array, the self-scalable octagonal
antenna array can be modified by inserting an element at the center of the subarray
generator, as shown in Figure 2.15(a). The modified self-scalable octagonal antenna array
at stages 1, 2, and 3 are shown in Figure 2.15.
1
1 1
1 1 1
1 1
1
11 1
11 2
1 1 2
1
1
1 2 2 1 1
2
1
11 1
2 1
1 2
1
1
2
1 1
1
1 1 1
1
1 1
2
1
12
1 1
2 1 1
1
1
21
1 2 2 1
1
1
2 11
2 1 1
1 1 1
(a) Stage 1 (b) Stage 2

47
11 11 11 2 1 2 1
1 1 1 21 21 1 1 111
131
112 11 13 33 1 1 13 3
11
12
21
3 2 2 1 11 1 2 2 32
21
11
121
142 11 11 44 22 11 12 24
11
11
1 12
111
1 2 2 3 3 2 2 11
13
1 11
11
133 32 21 31 33
111 11 33
21
113
112
214
313 12 1 2 22 2 1
12 1
13
34
42
23
3 11
22 2 2 212
1 31
211
421
313
1
2 21
1 112
13 11 1 22 31 21 1
12 1
11 1
1
2
13
11
1 11
22
21
1 1 1 1 11
22
21
1 11
13
1
2
11 1
1
1 21
1 12 13 22 1 11 312
11 1
12 2
13
13
124
112
13 1
212 2 2 22
11 3
32
24
43
31
1 21
1 2 22 2 1 21 313
412
211
311
1233 11 11
133 13 12 23 33
11
11
1 13
11
1 2 2 3 3 2 2 11
112
1 11
11
142 21 11 22 44 11 11 24
112
11
11
22
3 2 2 1 11 1 2 2 31
22
11
13 31 1 1 33 31 11 21
113
11
11 1 1 12 12 1 1 11 2 1 2 11 1
1 11
(c) Stage 3
Figure 2.15 Self-scalable octagonal array whose subarray generator is modified by inserting an element at the center The array factor of the modified self-scalable octagonal antenna array can be expressed
as:
( )( )[ ]∏ ∑= =
−
−−+=P
p n
pP πnθrjkδθAF
1
8
1
1 4/1cossinexp1),( ϕϕ (2.10)
The minimum spacing dmin of the modified self-scalable octagonal antenna array is given
by
( )°= 522sin2min .rd (2.11)

48
(a) dmin = 0.5λ
(b) dmin = λ Figure 2.16 Array factor plots for the self-scalable octagonal array at stage 3 inserting an element at the center of the generator
ny
nx
ny
nx
dB
dB

49
Figures 2.16(a) and (b) show plots of the array factor for the self-scalable octagonal array
at Stage 3 modified by inserting an element at the center of the generator in terms of nx
and ny. Figure 2.16(a) shows the array factor plot in the case where dmin = 0.5λ whereas
Figure 2.16(b) illustrates the array factor plot in the case where dmin = λ. Although for
dmin = 0.5λ, the sidelobes are relatively low compared to the large sidelobes for the
unmodified self-scalable octagonal array, for dmin = λ, grating lobes are present in the
visible region. The array factor of the modified self-scalable octagonal array is plotted in
Figure 2.17 for minimum spacings between elements, dmin = 0.5λ (dashed curve) and dmin
= λ (solid curve), evaluated at ϕ = 0°.
Comparing Figure 2.14 to Figure 2.17, the sidelobe level of the stage 3 array
factor of the self-scalable octagonal antenna array with the minimum spacing
0 10 20 30 40 50 60 70 80 90 -80
-70
-60
-50
-40
-30
-20
-10
0
Theta (degrees)
Arra
y Fa
ctor
(dB
)
Figure 2.17 Array factor of the self–scalable octagonal array at stage 3 for ϕ = 0° with minimum spacings of 0.5λ (dashed curve) and λ (solid curve) modified by inserting an element at the center of the generator

50
dmin = 0.5λ at ϕ = 0° is high relative to the mainbeam. While introducing an inserted
element at the center of the subarray generator clearly results in a considerable reduction
in the sidelobe level for a minimum spacing dmin = 0.5λ, no such reduction occurs for
dmin = λ and the maximum directivity for both cases increases as shown in Table 2.1.
Table 2.1 Comparison of maximum directivity for a stage 3 unmodified self-scalable octagonal array and a stage 3 modified self-scalable octagonal array
Maximum Directivity (dB)
Element Spacing
(dmin/λ) Stage 3 Unmodified Self-
Scalable Octagonal Array
Stage 3 Modified Self-
Scalable Octagonal Array
0.5 21.51 26.11
1 23.41 23.90
2.3 Honeycomb Fractal Arrays Honeycomb fractal arrays are generated using ring subarray generators. Like the
self-scalable hexagonal arrays discussed in Chapter 1, honeycomb fractal arrays are also
generated using a 6-element subarray generator. However, unlike the self-scalable
hexagonal array generator, the subarray generator for honeycomb fractal arrays is rotated
by an angle of π /2 from one stage to the next.
The array factor of the honeycomb array may be expressed in the form:

51
( ) ( ) ( )∏ ∑= =
−
−+
−
−=P
p n
pP pnrkjAF
1
6
1
1
21sin
621cosexp),( πθπϕδϕθ (2.12)
where the expansion ratio .3=δ
The honeycomb array at Stage 3 with the associated current amplitude excitation
for each individual element is illustrated in Figure 2.18.
1
1
1
2
1
1
3
2
1
3
3
1
3
3
3
1
2
3
4
1
4
2
3
4
2
4
4
2
1
1
3
4
4
3
4
4
3
4
1
4
4
3
3
4
4
1
4
3
4
4
3
4
4
3
1
1
2
4
4
2
4
3
2
4
1
4
3
2
1
3
3
3
1
3
3
1
2
3
1
1
2
1
1
1
Figure 2.18 Stage 3 honeycomb fractal array
2.3.1 Radiation Characteristics of Honeycomb Fractal Arrays
Figure 2.19 demonstrates that grating lobes are present when the array has a
minimum spacing dmin = λ, since sidelobes with the same intensity as the mainbeam are
present in the visible region (the unit circle centered at the origin). In particular, the
normalized array factor of the Stage 3 honeycomb fractal array sliced at φ = 0° is shown

52
in Figure 2.20. This plot is generated by substituting r = dmin , φ = 0° and P = 3 into
(2.12). Since grating lobes are present, the array is not desirable for broadband
applications which require high directivity. However, for element spacings of dmin = 0.5λ,
the honeycomb array appears to possess relatively low sidelobes.
Figure 2.19 Plot of normalized array factor of the stage 3 honey comb fractal array with dmin = λ
0 10 20 30 40 50 60 70 80 90 -80
-70
-60
-50
-40
-30
-20
-10
0
Theta (degrees)
A
rray
Fac
tor (
dB)
Figure 2.20. Plot of array factor of the stage 3 honeycomb array sliced at ϕ = 0° for dmin = 0.5λ (dashed curve) and dmin = λ (solid curve)
nx
ny dB

53
2.4 Conclusion
Figures 2.4, 2.8, 2.13, and 2.16 show that with the minimum spacing dmin = 0.5λ,
the array factor patterns of the self-scalable pentagonal and self-scalable octagonal array
have relatively low sidelobes, whereas with a minimum spacing dmin = λ, the array factor
patterns of the self-scalable pentagonal and self-scalable octagonal arrays have large
sidelobes.
Next, we make a comparison of Figure 2.4 to Figure 2.8 and Figure 2.13 to Figure
2.16. For the case of the modified self-scalable octagonal array, sidelobes are evidently
lower that those for the unmodified self-scalable octagonal array. However, in the case of
modified self-scalable pentagonal array, with dmin = 0.5λ, the sidelobes are not
significantly lower than those found in the case of the unmodified self-scalable
pentagonal array. However, even for the case where both self-scalable pentagonal and
octagonal arrays are modified by inserting an element at the center of the generators, the
sidelobe levels are still high relative to the mainbeam when the minimum element
spacing is dmin = λ.
Figure 2.19 shows a plot of the normalized array factor of the Stage 3 honey-
comb fractal array whose geometry is illustrated in Figure 2.18. In this case, we see that
high sidelobes are also present in the visible region when the array has a minimum
spacing dmin =λ. However, for element spacings of dmin = 0.5λ, the honeycomb array
appears to possess relatively low sidelobes.
The fractal arrays investigated so far have high sidelobes in the visible region dmin
= λ. This characteristic is undesirable where high directivity is needed for broadband

54
antenna arrays. Because of this, other kinds of fractal arrays will be further investigated
in an effort to identify candidates for broadband operation.

55
Chapter 3
Generalized Principle of Pattern Multiplication and Multiple-Generator Fractal Arrays
The conventional principle of pattern multiplication, which is briefly reviewed in
Section 3.1, is based on the assumption that the subarray generators replacing each
individual element are identical and their orientations are the same. The conventional
principle of pattern multiplication is not adequate for some more complicated array
configurations. Examples of such cases include the Peano and Peano-Gosper curve
arrays, which are discussed in Chapter 4 and 5, respectively. The generalized principle of
pattern multiplication is introduced in Section 3.2, as an effective methodology for
evaluating the radiation patterns produced by these more complex array configurations.
Section 3.3 introduces the array factor expression for fractal arrays generated
using multiple generators, which are discussed extensively in Chapters 4 and 5.
3.1 Conventional Principle of Pattern Multiplication
Initially, let us suppose that there is an antenna array that contains identical
elements, each with the same orientation. The array at the present stage is generated by
replacing each individual elements at the previous stage by a subarray generator whose
individual elements are identical. Also, the orientations of each of the individual elements
are assumed to be the same. Furthermore, the associated array factor of the subarray
generator and the array factor at the pth stage are assumed to be ),( ϕθpb and ),,( ϕθpAF

56
respectively. Hence, the associated array factor of the Pth stage array can be expressed
as:
,),(),(0
∏=
=P
ppP bAF ϕθϕθ (3.1)
3.2 Generalized Principle of Pattern Multiplication As mentioned earlier, the conventional principle of pattern multiplication is not
adequate for applying to more complicated cases where, for each stage, each individual
element is replaced by N different generators (or identical generators with different
orientations). By introducing a matrix ),( ϕθAF defined as:
=
),(...),(.........
),(...),(),(
1
111
ϕθϕθ
ϕθϕθϕθ
NNN
N
AFAF
AFAFAF (3.2)
where ),( ϕθijAF is the array factor associated with the #i element(s) of the subarray
generated by the #j generating element.
In this case, the array factor ),( ϕθAF may be expressed as:
∑∑= =
=N
i
N
jijAFAF
1 1),(),( ϕθϕθ
(3.3)

57
Now, let us suppose that we consider the procedure for generating an array
containing P stages. Further, let us suppose that there is an initiator array containing
generating elements numbered from 1 to N. The array factor, in this case, may be
represented by the matrix ),( ϕθAF introduced in (3.2) as follows:
==
),(000...000),(
),(),(
,0
11,0
00
ϕθ
ϕθϕθϕθ
NNb
bBAF (3.4)
where ),(0 ϕθB is a diagonal matrix. The entry, ),(,0 ϕθiib , is the array factor associated
with the #i generating element(s).
Next, at stage p > 0, we consider replacing each individual #j element with the j
subarray generator. Note that there are N different subarray generators; each of which
contains elements with different numbers 1 to N. The array factors of these N generators,
can be represented by a matrix denoted by ( )ϕθ ,pB , which can be expressed as:
( )
=),(...),(
.........),(...),(
,
,01,
1,11,
ϕθϕθ
ϕθϕθϕθ
NNNp
Npp
p
bb
bbB (3.5)
where the #j column corresponds to the j subarray generator; ),(, ϕθijpb is the array factor
associated with #i elements of the j subarray generator.

58
By applying the conventional principle of pattern multiplication, at stage 1, the
array factor associated with the #i element generated by the #j generating element can be
expressed as:
∑=
=N
kkjikij bbAF
1,0,1,1 ),(),(),( ϕθϕθϕθ (3.6)
or the array factor can be represented in the matrix form:
),(),(),( 011 ϕθϕθϕθ BBAF = (3.7)
By mathematical induction, the array factor matrix representation ),( ϕθPAF can be
expressed as:
),()...,(),(),( 00
ϕθϕθϕθϕθ BBBAF P
P
ppPP ∏
=− == (3.8)
In summary, the array factor is generated using the following procedure:
1. Start with n )( N≤ isotropic elements where b0,ii(θ,ϕ) is the array factor associated with the #i element. Label the #i element with #i. Note that b0,ij(θ,ϕ) = 0, .ji ≠
2. At stage 1, replace the #j element with the subarray whose array factor
associated with the #i element(s) generated by the #j generating element(s) is ).,(,1 ϕθijb
3. At further stages p ),( P≤ replace the #j element(s) with the subarray whose array factor associated with the #i element(s) generated by the #j generating element(s) is ).,(, ϕθijpb
The array factor generated by the procedure outlined above may be expressed as:

59
∑∑= =
=N
i
N
jijPP AFAF
1 1, ),(),( ϕθϕθ (3.9)
where
∏=
−=P
ppPP
0
),(),( ϕθϕθ BAF
3.3 Fractal Arrays Generated by Multiple Generators
The fractal arrays discussed in Chapter 1 are generated using ring subarray
generators. Due to their geometrical complexity, the conventional principle of pattern
multiplication may not be applied in these cases. Instead, the array factor expression for
more complex-structured antenna arrays may be written as a summation of all elements
of a matrix ),( ϕθAF as follows:
∑∑= =
=N
i
N
jAFAF
1 1),(),( ϕθϕθ ij (3.10)
where the array factor matrix representation ),( ϕθAF is of the form:
( )∏−=
−−−−
−−− ΨΨΨ=Ψ=
2
1
22
2)()()()(),( 11
)1(1
1
P
Pp
Ppp
PP δδδϕθ αα cfaAFAF (3.11)
where

60
( )
=Ψ−−−
NN
PP
a
aa
...000...000...00...0
)( 22
11
112
δαa and
=Ψ−
NN
P
c
cc
...000...000...00...0
)( 22
11
12δc
are diagonal matrices. The ith diagonal entry aii of the matrix ( ) )( 112
Ψ−−−
PP δαa is the array
factor of a subarray generated by the #i element and the jth diagonal entry cjj of the matrix
)( 12 Ψ−Pδc is the array factor of a subarray associated with the jth initiator element. The
term )( 1)1( Ψ−
−−p
p δαf is a matrix; the entry of the ith row and the jth column, fij, is the
array factor of a subarray of #i elements replacing the #j element. Also, note that the
subscript –(p-1)α means that the all subarrays are rotated clockwise by an angle of
(p-1)α.
If we set P1 = 0 and P2 = P, then, the matrix representation for ( )ϕθ ,AF can be
expressed as:
( )∏=
−−−−
−−− ΨΨΨ=Ψ=
P
p
Ppp
PP
0
11)1(
11 )()()()(),( δδδϕθ αα cfaAFAF (3.12)
where P represents the stage of the associated fractal array. By some mathematical
manipulation, the array factor can be expressed in the form
P
P
ppP CFACBAAF PPP
== ∏
=0
),( ϕθ (3.13)
where
[ ] [ ]NNN aaaa .............. 111 ==A (3.14)

61
=
NNN
N
p
ff
ff
..............................
......
1
111
F , and (3.15)
=
=
NNN
P
c
c
c
c
...
.........
111
C (3.16)
Also, note that ai and ci are the diagonal entries of the matrices ( ) )( 11 Ψ−−−
Pp δαa
and )( 1Ψ−Pδc , respectively, and fij is the entry of the ith row and jth column of
)( 1)1( Ψ−
−−p
p δαf .
The array factor formulations discussed so far in this section are expressed in
general terms. Specific applications of this generalized principle of pattern multiplication
will be considered in detail for the Peano and Peano-Gosper fractal arrays discussed in
Chapters 4 and 5, respectively.

62
Chapter 4
Peano and Sierpinski Dragon Fractal Arrays
Motivated by a fractal curve, known as the Peano Curve, each element of the
Peano fractal array is located at equally spaced intervals along the curve. Peano curves
are more complicated than the type of fractals discussed in the first two chapters. The
initiator for Peano curves is a straight line segment. Also, they have two generators rather
than one. Each generator is identical in shape but different in orientation.
4.1 Construction of the Peano Curve
The Peano curve may be constructed by following the steps outline below [4]:
1. Start with the horizontal initiator (i.e., the line segment of the unit length) shown
in Figure 4.1(a)
1
Figure 4.1(a) Initiator of the Peano curve

63
2. At stage 1, replace the initiator with the generator shown in Figure 4.1(b)
1
31
31
31
31
Figure 4.1(b) Generator for the horizontal generating line
3. At stage 2, replace all the generated horizontal lines at the previous stage with the generator shown in Figure 4.1(b) scaled by the factor of s =1/3, and replace all the generated vertical lines at the previous stage with the generator shown in Figure 4.1(c) scaled by the factor of s =1/3.

64
31
1
31
31
31
Figure 4.1(c) Generator for the vertical generating line

65
4. For further stages, repeat step 3.
Figure 4.1(a) shows the initiator of the Peano Curve. By replacing the initiator
with the generator shown in Figure 4.1(b), the Peano Curve at stage 1 is obtained as
shown in Figure 4.2(a) whereas the Peano curve at stage 2 is shown in Figure 4.2(b).
1
31
31
31
31
Figure 4.2(a) Peano curve (at stage 1)

66
31
31
31
1
31
91
Figure 4.2(b) Peano curve (at stage 2)
As mentioned earlier, Peano curves are more complicated than the fractal curves
discussed in the first two chapters. The curves have two generators; each of which is
identical in shape but different in orientation.
4.2 Construction of Peano Fractal Arrays
The steps in the construction of the Peano fractal array are listed below:
1. Start with an initiator element associated with the horizontal line initiator of the Peano curve. Label it “ # 1” as shown in Figure 4.3.

67
#1
dmin
Figure 4.3 Initiator element of the Peano curve array
The array factor may be described as
.1),( =ϕθAF (4.1)
At stage 1, replace the initiator element in the previous step with the subarray generator as shown in Figure 4.4.
#1
#1
#1
#1
#2
# 2
#1
dmin
#2
#2
dmin dmin
dmin
dmin
Figure 4.4 Subarray generator of the Peano curve array
Label each element of the subarray generator associated with the horizontal generated line with “#1” and each element of the subarray generator associated with the vertical generated line with “#2” (not available at stage 1). Now, the generated elements at the previous stage become the generating elements at the present stage. The array factor can be described as

68
),(),(2
1i11, ϕϕ θfθAF
i∑=
= , (4.2)
where ),θ(, ϕijpf , the entry of fp ),( ϕθ in the ith row and jth column, is the array factor of the subarray due to the #i generated elements replacing each of the #j generating elements, expanded by the expansion ratio of 3p-1. Hence, the array factor ),( ϕθAF can be rewritten as
),(),θ(2
1
2
1ϕϕ θAFAF
i jji,∑∑
= =
= , (4.3)
where
=
0001
),(),(),(),(
),θ(22,121,1
12,111,1
ϕϕϕϕ
ϕθfθfθfθf
AF
The terms f1,11(θ,φ) and f1,21(θ,φ) are illustrated by Figure 4.5 by letting p = 1.
2. At step 2, expand the array at the previous stage with the expansion ratio of δ = 3 and replace each of the #1 generating elements at the previous stage with the subarray shown in Figure 4.4 and each of the #2 generating elements with the subarray generator shown in Figure 4.4 rotated by 90°. Label each element of the subarray generator associated with the horizontal generated line with “#1” and each element of the subarray generator associated with the vertical generated line with “#2”. Now, the generated elements at the previous stage become the generating elements in the present stage. Hence, the array factor AF(θ,ϕ) can be represented by (4.3), where
=
0001
),(),(),(),(
),(),(),(),(
),θ(22,221,2
12,211,2
22,121,1
12,111,1
ϕϕϕϕ
ϕϕϕϕ
ϕθfθfθfθf
θfθfθfθf
AF (4.4)

69
#1 #1
#1
#1
#1
δ p-1dmin δ p-1dmin δ p-1dmin
δ p-1dmin
δ p-1dmin
#2
# 2
dmin
#2
#2
dmin dmin
δ p-1dmin
δ p-1dmin
),(),(),(),(
p,22p,21
p,12p,11
ϕϕϕϕ
θfθfθfθf
Figure 4.5 Figure to illustrate fp,11(θ,φ) and fp,21(θ,φ)

70
3. At step 2, expand the array at the previous stage with the expansion ratio of δ = 3 and replace each of the #1 generating elements at the previous stage with the subarray shown in Fig. 4.4 and each of the #2 generating elements with the subarray generator shown in Fig. 4.4 rotated by 90°. Label each element of the subarray generator associated with the horizontal generated line with “#1” and each element of the subarray generator associated with the vertical generated line with “#2”. Now, the generated elements at the previous stage become the generating elements in the present stage. Hence, the array factor AF(θ,ϕ) can be represented by (4.3), where
=
0001
),(),(),(),(
),(),(),(),(
),(22,221,2
12,211,2
22,121,1
12,111,1
ϕϕϕϕ
ϕϕϕϕ
ϕθfθfθfθf
θfθfθfθf
θAF (4.4)
4. Repeat step 2 for further stages. Consequently, AF(θ,ϕ) can be represented by (4.3), where
=∏
= 0001
),(),(),(),(
)(1 22,21,
12,11,P
p pp
pp
θfθfθfθf
θ,ϕϕϕϕ
ϕAF (4.5)
5. In the final step, replace the #1 element with two antenna elements aligned horizontally and the #2 element with two antenna elements aligned vertically. Similar to the previous step, the array factor AF(θ,ϕ) can be represented by (4.3), where
( ) ( )( ) ( )
=
=
∏
∏
=
=
ϕθϕθϕθϕθ
ϕϕϕϕ
ϕϕ
ϕϕϕϕ
ϕϕ
ϕ
,,,,
),(),(),(),(
),(00),(
0001
),(),(),(),(
),(00),(
),(
2221
1211
1 22,21,
12,11,
22
11
1 22,21,
12,11,
22
11
cccc
θfθfθfθf
θaθa
θfθfθfθf
θaθa
θ
P
p pp
pp
P
p pp
ppAF
(4.6)
a11 ),( ϕθ = the array factor associated with the horizontal 2-element subarray replacing each of the #1 (horizontal) generated elements.
a22 ),( ϕθ = the array factor associated with the vertical 2-element subarray
replacing each of the #2 (vertical) generated elements.
c(θ,ϕ) =
0001

71
In summary, the array factor at stage P, AFP(θ,ϕ) can be written as:
∑∑= =
=2
1
2
1),(),(
i jP θAFθAF ϕϕ P,ij (4.7)
where
),(),(),θ(),(1
ϕϕϕϕ θθθP
ppP cfaAF ∏
=
= (4.8)
The matrix )( ϕθ,PAF represents the array factor of the stage P Peano curve array. Its
elements )( ϕθ,ijP,AF are the array factor of the subarray generators due to the #i
generator element generated by the #j generating element.
The 2x2 diagonal matrix a(θ,ϕ) is given by
a ),( ϕθ =
),(0
0),(
22
11
ϕϕ
θaθa
(4.9)
It represents the array factors of the 2-element subarray generators, where a11 ),( ϕθ is the
array factor associated with the horizontal 2-element subarray replacing each of the #1
(horizontal) generated elements. Similarly, a22 ),( ϕθ is the array factor associated with
the vertical 2-element subarray replacing each of the #2 (vertical) generated elements.
fp,i,j ),( ϕθ , the entry of fp ),( ϕθ in the ith row and jth column, is the array factor of the
subarray due to the #i generated elements replacing each of the #j generating elements,
expanded by the expansion ratio of 3p-1. Finally,
c ),( ϕθ =( ) ( )( ) ( )
=
0001
,,,,
2221
1211
ϕθϕθϕθϕθ
cccc
(4.10)
is the diagonal matrix that represents the array factor of the initiator element(s). In this
case, the procedure starts with only a single #1 initiator element assumed to be isotropic.

72
In this case, there is only one non-zero constant entry assumed to be one in the first row
and column. The expression for ),( ϕθAF given in (4.6) may be rewritten as follows:
(4.11)000),(
),(),(),(),(
),(00),(
),( 11
1 22,21,
12,11,
22
11
= ∏
=
ϕϕϕϕϕ
ϕϕ
ϕθc
θfθfθfθf
θaθa
θP
p pp
ppAF
By rearranging (4.9), it follows that (4.7) can be expressed in the form:
[ ]
= ∏
= 0),θ(
),θ(),θ(),θ(),θ(
),θ(),θ()( 11
1 p,22p,21
p,12p,112211
ϕϕϕϕϕ
ϕϕϕc
ffff
aaθ,AFP
pP (4.12)
Using the following substitutions:
( )
= ϕθϕθ cossin
2cos2, min
11dka (4.13)
( )
−=
2cossin
2cos2, min
22πϕθϕθ
dka (4.14)
[ ] [ ][ ] [ ]
=
2,21,22,11,1
,,,,
2221
1211
)(θf)(θf)(θf)(θf
p,p,
p,p,
ϕϕϕϕ
(4.15)

73
where
( )
( )
( )
( )
≠
−+++
−+−
=
−+−+
−++
=
−
−
−
−
jijdk
jdk
jijdk
jdk
ji
p
p
p
p
,2
14
cossin2
2cos2
21
4cossin
22cos2
,2
12
cossin2
cos2
21cossin
2cos21
],[
min1
min1
min1
min1
ππϕθδ
ππϕθδ
ππϕθδ
πϕθδ
(4.16)
and
==
=otherwise. 0,
1ji ,1),( ϕθijc (4.17)
Now, the array factor is of the form (3.13), where
CFACAB PP
== ∏
=
P
pAF
0
),( ϕθ (4.18)
where
( ) [ ] ( ) ( )[ ]ϕθϕθϕθ ,, 221121 aaaa === ,aA (4.19)
( ) ( )( ) ( )
[ ] [ ][ ] [ ]
=
=
=
2,21,22,11,1
,,,,
2221
1211
2221
1211
ϕθϕθϕθϕθ
ffff
ffff
pF , and (4.20)
( ) ( )( )
=
=
==
01
,,
,22
11
2
1
ϕθϕθ
ϕθcc
cc
cC . (4.21)

74
An example of construction of the Peano curve array at stage 2 is shown in Figure
4.6. Also, the Peano fractal array at stages P = 1 and 2 are shown in Figure 4.7
#1
dmin
Figure 4.6(a) Construction of the Peano fractal array (at step 1)
#1 #1
#1
#1
#2 #2
#2 #2
#1
dmin
dmin
dmin
dmin dmin
Figure 4.6(b) Construction of the Peano fractal array (at step 2)

75
#1 #1
#1
#1
#2 #2
#2 #2 #1 #1 #1
#1
#1
#2 #2
#2 #2 #1
#1 #1
#1
#1
#2 #2
#2 #2 #1
#1 #1
#1
#1
#2 #2
#2 #2 #1
#2
#2 #2 #2 #1
#1
#1
#1 #2
#2
#2 #2 #2 #1
#1
#1
#1 #2
#2
#2 #2 #2 #1
#1
#1
#1 #2
#2
#2 #2 #2 #1
#1
#1
#1 #2
#1 #1
#1
#1
#2 #2
#2 #2 #1
dmin
3dmin 3dmin
3dmin
3dmin
3dmin
Figure 4.6(c) Construction of the Peano fractal array (at step 3)
1
2
4
2
2
4
4
4
2
2
4
4
4
4
4
2
2
4
4
4
4
4
4
42
2
4
4
4
4
4
4
4 2
2
4
4
4
4
4
2
2
4
4
4
2
2
4
2
1
dmin 3dmin 3dmin dmin dmin
3dmin
3dmin
dmin
dmin
Figure 4.6(d) Construction of the Stage 2 Peano fractal array (at step 4)

76
1
2
4
2
2
4
2
1
dmin
3dmin
dmin
dmin
dmin dmin
Figure 4.7(a) Peano fractal array (at stage 1)

77
1
2
4
2
2
4
4
4
2
2
4
4
4
4
4
2
2
4
4
4
4
4
4
42
2
4
4
4
4
4
4
4 2
2
4
4
4
4
4
2
2
4
4
4
2
2
4
2
1
dmin 3dmin 3dmin dmin dmin
3dmin
3dmin
dmin
dmin
Figure 4.7(b) Peano fractal array (at stage 2)
Figure 4.8 illustrates a plot of the array factor as a function of nx and ny for the
stage 3 Peano fractal array with minimum spacing dmin = λ. The plot shows that grating
lobes are present in the visible region. Figure 4.9 shows the array factor of the Peano
fractal array at stage P = 3 with the minimum spacing between elements dmin = 0.5λ and λ
at ϕ = 0°. While no grating lobes are present in the half wavelength spaced case,
relatively high sidelobes (grating lobes) are evident in the full wavelength spaced case.
Hence, this array may not be suitable for broadband applications.
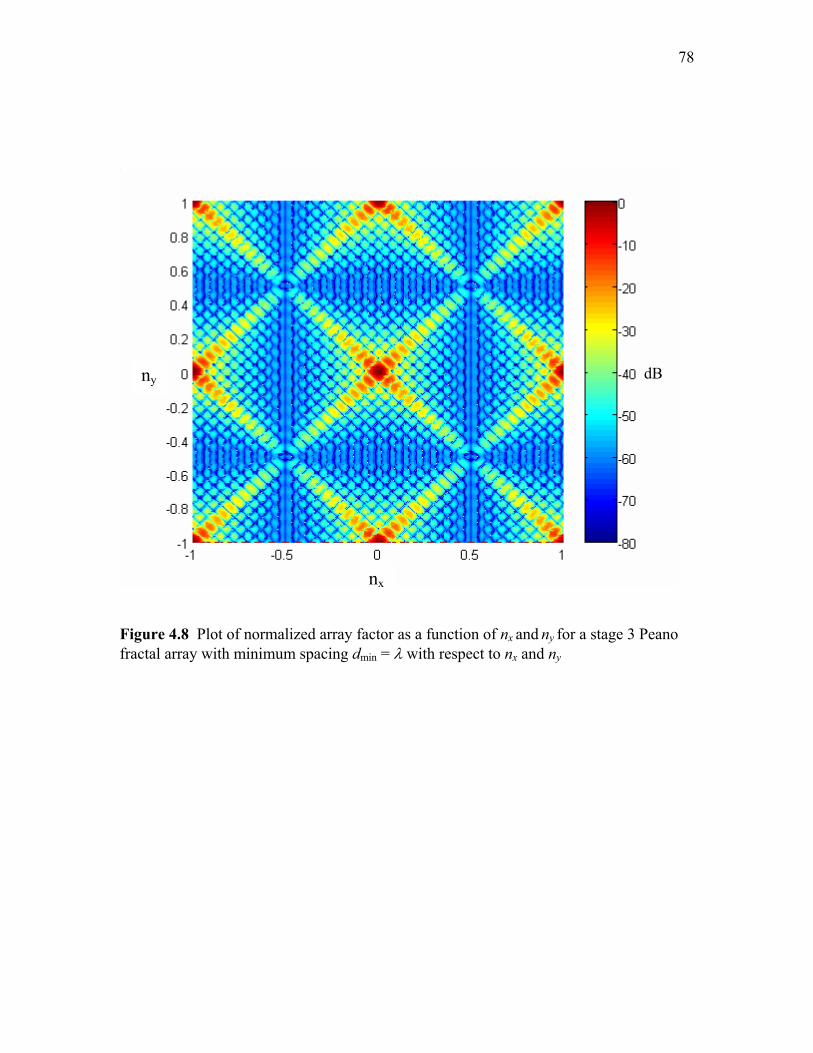
78
Figure 4.8 Plot of normalized array factor as a function of nx and ny for a stage 3 Peano fractal array with minimum spacing dmin = λ with respect to nx and ny
ny
nx
dB

79
0 10 20 30 40 50 60 70 80 90 -80
-70
-60
-50
-40
-30
-20
-10
0
Theta (degrees)
Arra
y Fa
ctor
(dB)
Figure 4.9 Normalized array factor of the Peano curve array at °= 0ϕ , stage 3, dmin = 0.5λ (dashed curve) and dmin = λ (solid curve)
4.3 The Construction of Sierpinski Dragon Array
In this section we will consider a new type of fractal array, which we call the
Sierpinski dragon array. The steps in the generation of the Sierpinski dragon fractal curve
are summarized below [53]:
1. Start with the initiator (line segment) show in Figure 4.10(a).
2. At stage 1, replace the initiator by the generator shown in Figure 4.10(b). Hence, the generator becomes the Sierpinski dragon curve at stage 1.

80
3. For further stages, replace each individual line by the generator shown, in Figure 4.10(b), which is scaled by a factor s = 1/2 and rotated by angles corresponding to Figure 4.10(c), which shows Sierpinski dragon curves superimposed for stages P = 1, 2 and 3.
Figure 4.10(a) Initiator of Sierpinski dragon
Figure 4.10(b) Stage 1 Sierpinski dragon curve, generator is shown by solid curve, whereas the dashed line represents the initiator
Figure 4.10(c) Construction of the Sierpinski dragon curve (stage 2)
4. Generate higher order Sierpinski dragon curves by a replication of the iterative process describe in step 3.

81
Figure 4.11 shows the Sierpinski dragon curves for stages 1, 3, and 5.
(a) Stage 1 (b) Stage 3
(c) Stage 5
Figure 4.11 Sierpinski dragon

82
4.4 The Sierpinski Dragon Array
Similar to the Peano fractal array discussed earlier, the Sierpinski dragon fractal
array may be constructed by a procedure which is similar to that of the Peano fractal
array. The associated array factor ),( ϕθPAF may be expressed as:
CFACAB pP
== ∏
=
P
pPAF
0
),( ϕθ (4.22)
where
[ ]61 ... aa=A (4.23)
=pp
pp
ff
ff
6661
1611
............
...
pF (4.24)
=
0...01
C (4.25)
( )
−= iikda ϕϕθ cossin
2cos2 min (4.26)
6
2)1( πϕ −= ii (4.27)

83
P1pp FFF
= ∏∏
−
=−
=
1
11
P
p
P
p (4.28)
[ ])66( x
pijf=pF (4.29)
[ ]∑∈
−−=ijNn
njnpp
ij krjf ]cos[sinexp γϕϕθ (4.30)
221nn
pnp yxr += −δ (4.31)
<+
=
>
=
0,arctan
0,0
0,arctan
nn
n
n
nn
n
n
xxy
x
xxy
π
γ (4.32)
62)1( πϕ −= jj (4.33)
2=δ (4.34)

84
[ ]
{ } { } { }{ } { } { }
{ } { } { }{ } { } { }
{ } { } { }{ } { } { }
==
231231
123123
312312
)66(
φφφφφφ
φφφφφφ
φφφφφφ
xijNN (4.35)
Table 4.1 The parameters xn and yn expressed in terms of dmin
n
xn
yn
1 2mind
− min83 d
2 0 min4
3 d
3 2mind min8
3 d
The geometry for the Sierpinski dragon array at stages P = 3 and 5 is illustrated in
Figure 4.12.

85
1
2 2
2
2
2
2
2
2
2
2
2
2
2
2
2
2
2
2
2
2
2
2
2
2
2
2
1
Figure 4.12(a) The stage 3 Sierpinski dragon array
12 2
2
2
2
2
2
2
2
2
2
2
2
2
2
2
2
2
2
2
2
2
2
2
2
2
2
2
2
2
2
2
2
2
2
2
2
2
2
2
2
2
2
2
2
2
2
2
2
2
2
2
2
2
2
2
2
2
2
2
2
2
2
2
2
2
2
2
2
2
2
2
2
2
2
2
2
2
2
2
2
2
2
2
2
2
2
2
2
2
2
2
2
2
2
2
2
2
2
2
2
2
2
2
2
2
2
2
2
2
2
2
2
2
2
2
2
2
2
2
2
22
2
2
2
2
2
2
2
2
2
2
2
2
2
2
2
2
2
2
2
2
2
2
2
2
2
2
2
2
2
2
2
2
2
2
2
2
2
2
2
2
2
2
2
2
2
2
2
2
2
2
2
2
2
2
2
2
2
2
2
2
2
2
2
2
2
2
2
2
2
2
2
2
2
2
2
2
2
2
2
2
2
2
2
2
2
2
2
2
2
2
2
2
2
2
2
2
2
2
2
2
2
2
2
2
2
2
2
2
2
2
2
2
2
2
2
2
2
2
21
Figure 4.12(b) The stage 5 Sierpinski dragon array

86
Figure 4.13 Plot of the normalized Sierpinski dragon array factor at stage 5 with dmin = λ with respect to nx and ny
Figure 4.13 shows a plot of the normalized array factor. The x- and y-axes denote
ϕθ cossin=xn and ϕθ sinsin=yn . This figure demonstrates that high sidelobes are
present in the visible region when λ=mind since red spots, which represent high sidelobe
levels, are located inside the unit circle centered at the origin. In particular, plots of the
normalized array factor versus θ of the stage 3 and stage 5 Sierpinski dragon array with
dmin = 0.5λ and λ sliced at ϕ = 0° are shown in Figures 4.14 and 4.15, respectively.
These figures also demonstrate that high sidelobe levels are present when the minimum
spacing dmin = λ. This characteristic is not desirable for broadband applications.
nx
ny dB

87
0 10 20 30 40 50 60 70 80 90-80
-70
-60
-50
-40
-30
-20
-10
0
Theta (degrees)
Arr
ay F
acto
r (dB
)
Figure 4.14 Plot of stage 3 Sierpinski dragon normalized array factor for ϕ = 0° with minimum spacings of dmin = λ (solid curve) and dmin = 0.5λ (dashed curve)

88
0 10 20 30 40 50 60 70 80 90-80
-70
-60
-50
-40
-30
-20
-10
0
Theta (degrees)
Arr
ay F
acto
r (dB
)
Figure 4.15 Plot of stage 5 Sierpinski dragon normalized array factor for ϕ = 0° for minimum spacings of dmin = λ (solid curve) and dmin = 0.5λ (dashed curve)

89
Chapter 5
The Peano-Gosper Fractal Array
Fractal concepts were first introduced for use in antenna array theory by Kim and
Jaggard [41] who developed a design methodology for quasi-random arrays that is based
on properties of random fractals. In other words, random fractals were used to generate
array configurations that are somewhere between completely ordered, i.e., periodic, and
completely disordered, or random. The main advantage of this technique is that it yields
sparse arrays that possess relatively low sidelobes, a feature typically associated with
periodic arrays but not random arrays. They are also robust, with respect to element
failure, a feature which is typically associated with random arrays but not periodic arrays.
More recently, the fact that deterministic fractal arrays can be generated recursively, i.e.,
through successive stages of growth starting from a simple generating array, was
exploited by Werner et al. [48]. It is discussed earlier in the thesis in Chapters 1-3 in
order to develop rapid algorithms for use in efficient radiation pattern computations and
adaptive beamforming, especially for arrays with multiple stages of growth that contain a
relatively large number of elements. It was also demonstrated in [48] that fractal arrays
generated in this recursive fashion are examples of deterministically thinned arrays. A
more comprehensive overview of these and other topics related to the theory and design
of fractal arrays may be found in [49].
Techniques based on simulated annealing and genetic algorithms have been
investigated for optimization of thinned arrays [54-58]. A typical scenario involves
optimizing an array configuration to yield the lowest possible sidelobe levels by starting

90
with a fully populated uniformly spaced array and either removing certain elements or
perturbing the existing element locations. Genetic algorithm techniques have been
developed in [59-61] for evolving thinned aperiodic phased arrays with reduced grating
lobes when steered over large scan angles. The optimization procedures introduced in
[54-58] have proven to be extremely versatile and robust design tools. However, one of
the main drawbacks in these cases is that the design process is not based on simple
deterministic design rules and leads to arrays with non-uniformly spaced elements.
In this chapter the radiation properties of a new class of deterministic fractal
arrays are investigated whose geometry is based on self-avoiding Peano-Gosper curves.
5.1 Construction of Peano-Gosper Curves
The procedure to construct the Peano-Gosper curve is described as follows [1]:
1. Start with the same initiator as the Peano curve shown in Figure 5.1.
1
Figure 5.1 The Peano-Gosper curve initiator
2. At Stage 1, replace the initiator with the generator shown in Figure 5.2.
3. At Stage 2, turn the generator counterclockwise as shown in Figure 5.2 until the link between both ends is aligned in the same direction as that of each line segment of the generator(s) in the previous stage. Scale the generator until the size of the links at both ends is the same as that of each line segment of the generator. Replace each line segment of the generated curve at the previous stage with an appropriately scaled version of the generator.
4. Repeat step 3 for further stages.

91
1
d
α
60°-α
60°
α
Figure 5.2 The Peano-Gosper curve generator
(a) Stage 1 (b) Stage 2

92
Figure 5.3 The first three stages in the construction of a self-avoiding Peano-Gosper curve. The initiator is shown as the dashed line superimposed on the stage 1 generator. The generator (unscaled) is shown again in (b) as the dashed curve superimposed on the Stage 2 Peano-Gosper curve
The first three stages in the construction of a Peano-Gosper curve are shown in
Figure 5.3 [1]. Figure 5.4 shows stages 1, 2, and 4 Gosper islands bounding the
associated Peano-Gosper curves which fill the interior. The boundary contour of these
Gosper islands are formed by a variant of a closed Koch curve. One of the notable
features of Gosper islands is that they can be used to cover the plane via a tiling [1].
Furthermore, Gosper island tiles are self-similar and can be divided into seven smaller
tiles, each representing a scaled copy of the original. This property is known as pertiling.
(c) Stage 3

93
(a) Stage 1 (b) Stage 2
(c) Stage 4 Figure 5.4 Gosper islands and their corresponding Peano-Gosper curves for (a) stage 1, (b) stage 2, and (c) stage 4
5.2 Construction of the Peano-Gosper Fractal Array
The first three stages (i.e., P=1, P=2, and P=3) in the construction of a fractal
array based on the Peano-Gosper curve are shown in Figure 5.5.

94
1
2
2
2
2
2
2
1
1
2
2
2
2
2
2
2
2
2
2
2
2
2
2
2
2
2
2
2
2
2
2
2
2
2
2
2
2
2
2
2
2
2
2
2
2
2
2
2
2
2
2
2
2
2
2
1
2
2
2
2
2
1
2
2
2
2
2
2
2
2
2
2
2
2
2
2
2
2
2
2
2
2
2
2
2
2
2
2
2
2
2
2
2
2
2
2
2
2
2
2
2
2
2
2
2
2
2
2
2
2
2
2
2
2
2
2
2
2
2
2
2
2
2
2
2
2
2
2
2
2
2
2
2
2
2
2
2
2
2
2
2
2
2
2
2
2
2
2
2
2
2
2
2
2
2
2
2
2
2
2
2
2
2
2
2
2
2
2
2
2
2
2
2
2
2
2
2
2
2
2
2
2
2
2
2
2
2
2
2
2
2
2
2
2
2
2
2
2
2
2
2
2
2
2
2
2
2
2
2
2
2
2
2
2
2
2
2
2
2
2
2
2
2
2
2
2
2
2
2
2
2
2
2
2
2
2
2
2
2
2
2
2
2
2
2
2
2
2
2
2
2
2
2
2
2
2
2
2
2
2
2
2
2
2
2
2
2
2
2
2
2
2
2
2
2
2
2
2
2
2
2
2
2
2
2
2
2
2
2
2
2
2
2
2
2
2
2
2
2
2
2
2
2
2
2
2
2
2
2
2
2
2
2
2
2
2
2
2
2
2
2
2
2
2
2
2
2
2
2
2
2
2
2
2
2
2
2
2
2
2
2
2
2
2
2
2
2
2
2
2
2
2
2
2
2
2
2
2
2
2
2
2
2
2
2
2
2
2
2
2
2
2
2
2
2
2
2
2
2
2
2
2
2
2
2
2
2
2
2
2
2
2
2
2
2
2
2
1
2
2
2
2
Figure 5.5 Element locations and associated current distribution for Stages 1-3 Peano-Gosper fractal arrays with minimum spacing between elements and expansion factor denoted by mind and ,δ respectively. Note that the spacing mind between consecutive array elements along the Peano-Gosper curve is assumed to be the same for each stage.
(a) Stage 1 (b) Stage 2
(c) Stage 3

95
Also indicated in Figure 5.5 are the location of the elements and their corresponding
values of current amplitude excitation. The minimum spacing between array elements is
assumed to be held fixed at a value of mind for each stage of growth.
The procedure to construct the fractal array associated with the Peano-Gosper curve
is as follows:
1. Start with an initiator element. Label it “#1”. The array factor AF(θ,ϕ) in this case for a single isotropic source can be written as:
.1),θ( =ϕAF (5.1)
2. At stage 1, replace the initiator with the generated elements corresponding to the #1 generating element shown in Figure 5.6.
#1
#2
#3
#4
#5
#6
#7
α α 60°-α
60°
ddδd min
min =
dmin
rn
ϕn
Figure 5.6 Generating elements with n = 1 to n = 7 are located along the stage 1 Peano-Gosper curve

96
3. Similar to the case considered previously for the Peano curve array, the array factor AF(θ,ϕ) can be expressed as:
,),(),(3
1
3
1,∑∑
= =
=i j
jiAFAF ϕθϕθ (5.2)
where
cfAF 1=),( ϕθ
Also similar to the case of the Peano curve array, 1f = ( ) ,1 ϕθf = [f1,i,j( )ϕθ, ]3x3 is the matrix that represents the array factor of the subarray generators. The expression f1,i,j( )ϕθ, is the array factor of the subarray due to the #i generated elements replacing each of the #j generating elements and, 33)],([ xijc ϕθ=c (5.3)
where
==
==otherwise ,0
1,1),(
jic ijij δϕθ
4. At further stages, expand the array at the previous stage with the expansion ratio of δ = 1/d, replace each of the generated elements at the previous stage with the corresponding subarray generator shown in Figure 5.6 which is rotated counterclockwise by the angle of (i-1)π/3-(p-1)α. The array factor AF(θ,ϕ) can then be expressed by (5.2), where
.),(1
cfAF p∏=
=P
p
θ ϕ (5.4)
Note that fp,i,j( ),ϕθ, the entry of the ith row and jth column of fp( )ϕθ, is the array factor of the subarray due to the #i generated elements replacing each of the #j generating elements, expanded by the expansion ratio of δ p-1, where δ = 1/d and rotating by the angle (p-1)α More specifically,
[ ]∑∈
+−+−−=ijNn
njnpp
ij pPkrjf ])1(cos[sinexp αγϕϕθ (5.5)

97
221nn
pnp yxr += −δ (5.6)
<+
=
>
=
0,arctan
0,0
0,arctan
nn
n
n
nn
n
n
xxy
x
xxy
π
γ (5.7)
32)1( πϕ −= jj (5.8)
where the values of xn and yn are listed in Table 5.1
5. At the final stage, replace all the generated elements with the two elements aligned in the associated direction with the label of each of the generated elements. Similarly, with respect to the previous step, the array factor AF(θ,ϕ) can be expressed by (5.2), where
.),θ(1
cfaAF p∏=
=P
pϕ (5.9)
and a = a ( )ϕθ, = [ai,j(θ,ϕ)]3x3, is the 3x3 diagonal matrix that represents the array factors of the 2-element subarray generators. Note that
d = sin(α)/sin(2π/3) and α = arctan 5/3 (5.10)
where both d and α shown in Figure 5.2 can be derived from the following expression:
( )αd
αd
−°−°==
° 120180sin2
sin120sin1 (5.11)

98
By manipulating (5.1)-(5.11), a set formula for copying, scaling, rotating, and
translating of the generating array defined at stage 1 (P = 1) is used to recursively
construct higher-order Peano-Gosper fractal arrays (i.e., arrays with P>1). This fact can
be used to show that the array factor for a stage P Peano-Gosper fractal array may be
conveniently expressed in terms of the product of P 3x3 matrices which are pre-
multiplied by a vector AP and post-multiplied by a vector C, so that
( ) CBA PP=ϕθ ,PAF (5.12)
where
( ) ( ) ( )[ ] [ ]321332211 ,,, aaaaaa == ϕθϕθϕθPA (5.13)
( )
−+−= αϕϕθ )1(cossin
2cos2 min Pkda ii (5.14)
3
2)1( πϕ −= ii (5.15)
=
001
C (5.16)
PP
P
ppP FBFB 1
1−
=
== ∏ (5.17)

99
[ ])33( x
pijp f=F (5.18)
[ ]∑∈
+−+−−=ijNn
njnpp
ij pPkrjf ])1(cos[sinexp αγϕϕθ (5.19)
221nn
pnp yxr += −δ (5.20)
<+
=
>
=
0,arctan
0,0
0,arctan
nn
n
n
nn
n
n
xxy
x
xxy
π
γ (5.21)
32)1( πϕ −= jj (5.22)
=
53arctan α (5.23)
αδ
sin1
23
= (5.24)
Note that the parameter δ represents the scale factor used to generate Peano-Gosper
arrays. The values of ijN required in (5.19) are found from

100
[ ] ( )
{ } { } { }{ } { } { }{ } { } { }
==
6,5,3,17,4226,5,3,17,47,426,5,3,1
33XijNN (5.25)
Finally, the values of nx and ny for 71−=n are listed in Table 5.1. At this point we
recognize that the compact product representation given in (5.17) may be used to develop
an efficient iterative procedure for calculating the radiation patterns of these Peano-
Gosper fractal arrays to an arbitrary stage of growth P. This property may be useful for
applications involving array signal processing [48,49].
Table 5.1 Expressions for ),( nn yx in terms of the array parameters α,mind , and δ
n
xn
yn
1 0.5dmin(cosα-δ) -0.5dminsinα
2 0 0
3 dmin(0.5δ-1.5cosα) 1.5dminsinα
4 dmin(0.5δ-2cosα-0.5cos(π/3+α)) dmin(0.5sin(π/3+α)+2sinα)
5 dmin(0.5δ-1.5cosα-cos(π/3+α)) dmin(sin(π/3+α)+0.5sinα)
6 dmin(0.5δ-0.5cosα-cos(π/3+α)) dmin(sin(π/3+α)+0.5sinα)
7 dmin(0.5δ-0.5cos(π/3+α)) 0.5dminsin(π/3+α)

101
5.3 Results
Figure 5.7 and Figure 5.8 contain plots of the normalized array factor versus θ
for a Stage 3 Peano-Gosper fractal array with o0=ϕ and o90=ϕ , respectively. The
dashed curves represent radiation pattern slices for a Peano-Gosper array with element
spacings of 2/min λ=d while the solid curves represent the corresponding radiation
pattern slices for the same array with λ=mind . Figure 5.9 shows a plot of the
normalized array factor (in dB) for the case where λ=mind , o90=θ , and .3600 oo ≤≤ ϕ
0 10 20 30 40 50 60 70 80 90-80
-70
-60
-50
-40
-30
-20
-10
0
Theta (degrees)
A
rray
Fac
tor (
dB)
Figure 5.7 Plots of the normalized stage 3 Peano-Gosper fractal array factor versus θ for ϕ = 0°. The dashed curve represents the case where 2/min λ=d θ and the solid curve represents the case where λ=mind

102
0 10 20 30 40 50 60 70 80 90-80
-70
-60
-50
-40
-30
-20
-10
0
Theta (degrees)
A
rray
Fac
tor (
dB)
Figure 5.8 Plots of the normalized stage 3 Peano-Gosper fractal array factor versus θ for ϕ = 90°. The dashed curve represents the case where 2/min λ=d and the solid curve represents the case where λ=mind
0 50 100 150 200 250 300 350 -80
-70
-60
-50
-40
-30
-20
-10
0
Phi (degrees)
A
rray
Fac
tor (
dB)
Figure 5.9 Plot of the normalized stage 3 Peano-Gosper fractal array factor versus ϕ for θ = 90° and dmin = λ

103
Figure 5.10 Plot of the normalized stage 3 Peano-Gosper curve fractal array factor as a function of nx = sin θ cosϕ and ny = sin θ sin ϕ with dmin = λ
Figure 5.10 demonstrates the total absence of grating lobes even with elements spaced
one wavelength apart. In fact, the highest sidelobes in the azimuthal plane are 23.85 dB
down from the mainbeam at .0o=θ For instance, the plot shown in Figure 5.9 indicates
that one of these sidelobes is located at the point corresponding to o90=θ and .26o=ϕ
A plot of the normalized array factor versus θ for this Peano-Gosper array at o26=ϕ is
shown in Figure 5.12.
The maximum allowable angle steered from broadside may also be determined by
Figure 5.10. By choosing (nx, ny) = (0.92, -0.4) in Figure 5.10 to be on the boundary of
nx
ny dB

104
visible region, the maximum allowable angle steered from broadside (θ max) may be
obtained using (1.18), ( )1arcsinmax −= bθ , where b is the distance from the origin to the
chosen threshold point. The distance b may be obtained as 0032.14.092.0 22 =+ .
Consequently, the maximum allowable angle θ max, for minimum spacing of dmin = λ, is
.18.0 o For minimum spacings of dmin = 0.5 λ to λ, the maximum allowable angle steered
from broadside may be obtained by modifying (1.18) in the following way:
>
−°
≤
−≤
−
=11,90
110,1arcsin
min
minminmax
bd
bd
bd
λ
λλ
θ (5.26)
A plot of maximum allowable angleθ max versus dmin is shown in Figure 5.11.
0.5 0.55 0.6 0.65 0.7 0.75 0.8 0.85 0.9 0.95 1 0
10
20
30
40
50
60
70
80
90
Minimum Spacing dmin (λ)
Max
imum
Allo
wab
le S
teer
ed A
ngle
(deg
rees
)
Figure 5.11 Plot to show maximum allowable angle (θmax) versus minimum spacing between adjacent elements dmin in λ for the stage 3 Peano-Gosper fractal array

105
0 1 0 2 0 3 0 4 0 5 0 6 0 7 0 8 0 9 0-8 0
-7 0
-6 0
-5 0
-4 0
-3 0
-2 0
-1 0
0
T h e ta (d e g re e s )
Arra
y Fa
ctor
(dB)
Figure 5.12 Plot of the normalized stage 3 Peano-Gosper fractal array factor versus θ for ϕ = 26° and dmin = λ
The curves in Figure 5.12 demonstrate the remarkable feature exhibited by the
family of Peano-Gosper fractal arrays that no grating lobes appear in the radiation pattern
when the minimum element spacing is changed from a half-wavelength to at least a full
wavelength. This property may be attributed to the unique arrangement, i.e., tiling of
parallelogram cells in the plane that forms an irregular boundary contour by filling a
closed Koch curve. For comparison purposes, we consider a uniformly excited periodic
19x19 square array of comparable size to the Stage 3 Peano-Gosper fractal array, which
contains a total of 344 elements. Plots of the normalized array factor for the 19x19
periodic square array are shown in Figure 5.13 for element spacings of 2/min λ=d
(dashed curve) and λ=mind (solid curve). A grating lobe is clearly visible for the case
in which the elements are periodically spaced one wavelength apart.

106
0 10 20 30 40 50 60 70 80 90-80
-70
-60
-50
-40
-30
-20
-10
0
Theta (degrees)
Arra
y Fa
ctor
(dB)
Figure 5.13 Plots of the normalized array factor versus θ with ϕ = 0° for a uniformly excited 19x19 periodic square array. The dashed curve represents the case where
2/min λ=d and the solid curve represents the case where λ=mind
0 10 20 30 40 50 60 70 80 90 -80
-70
-60
-50
-40
-30
-20
-10
0
Theta (degrees)
Arr
ay F
acto
r (dB
)
Figure 5.14 Plots of the normalized array factor versus θ with ϕ = 0° and λ2min =d for a stage 3 Peano-Gosper fractal array (solid curve) and a uniformly excited 19x19 square array (dashed curve)

107
The solid curve shown in Figure 5.14 is a plot of the Stage 3 Peano-Gosper fractal array
factor for the case where the minimum spacing between elements is increased to two
wavelengths (i.e., λ2min =d ). For comparison purposes, a plot of the array factor for a
uniformly excited 19x19 square array with elements spaced two wavelengths apart has
been included in Figure 5.14 as the dashed curve. The two grating lobes that are present
in the radiation pattern of the conventional 19x19 square array are clearly identifiable
from this plot.
The array factor for a stage P Peano-Gosper fractal array with PN elements may
be expressed in an alternative form given by:
[ ]{ }∑∑==
+−=•=PP N
nnnnn
N
nnnnP krjInrjkjIAF
11)cos(sinexp)ˆexp()exp(),( βϕϕθβϕθ (5.27)
where
nI and nβ represents the excitation current amplitude and phase of the nth element respectively
nr is the horizontal position vector for the nth element with magnitude rn and angle ϕn
n is the unit vector in the direction of the far-field observation point
An expression for the maximum directivity of a broadside stage P Peano-Gosper fractal
array of isotropic sources may be readily obtained by setting 0=nβ in (5.27) and
substituting the result into

108
∫ ∫= π π
ϕθθϕθπ
ϕθ2
0 0
2
2
max
sin),(41
),(
ddAF
AFD
P
PP (5.28)
This leads to the following expression, which is proven in the Appendix, for the
maximum directivity given by:
( )( )∑∑∑
∑
=
−
==
=
−−
+
=PP
P
N
m
m
n mn
mnmn
N
nn
N
nn
P
rrkrrk
III
ID
2
1
11
2
2
1
sin2
(5.29)
Table 5.2 includes the values of maximum directivity, calculated using (5.29), for several
Peano-Gosper fractal arrays with different minimum element spacings mind and stages of
growth P. Table 5.3 provides a comparison between the maximum directivity of a Stage
3 Peano-Gosper array and that of a conventional uniformly excited 19x19 planar square
array. These directivity comparisons are made for three different values of array element
spacings (i.e., ,2/,4/ minmin λλ == dd and λ=mind ). In the first case, where the
element spacing is assumed to be 4/min λ=d , we find that the maximum directivity of
the Stage 3 Peano-Gosper array and the 19x19 square array are comparable. This is also
found to be the case when the element spacing is increased to 2/min λ=d (see Table 5.2).
However, in the third case where the element spacing is increased to λ=mind , we see
that the maximum directivity for the stage 3 Peano-Gosper array is about 10 dB higher
than its 19x19 square array counterpart. This is because the maximum directivity for the
Stage 3 Peano-Gosper array increases from 26.54 dB to 31.25 dB when the element
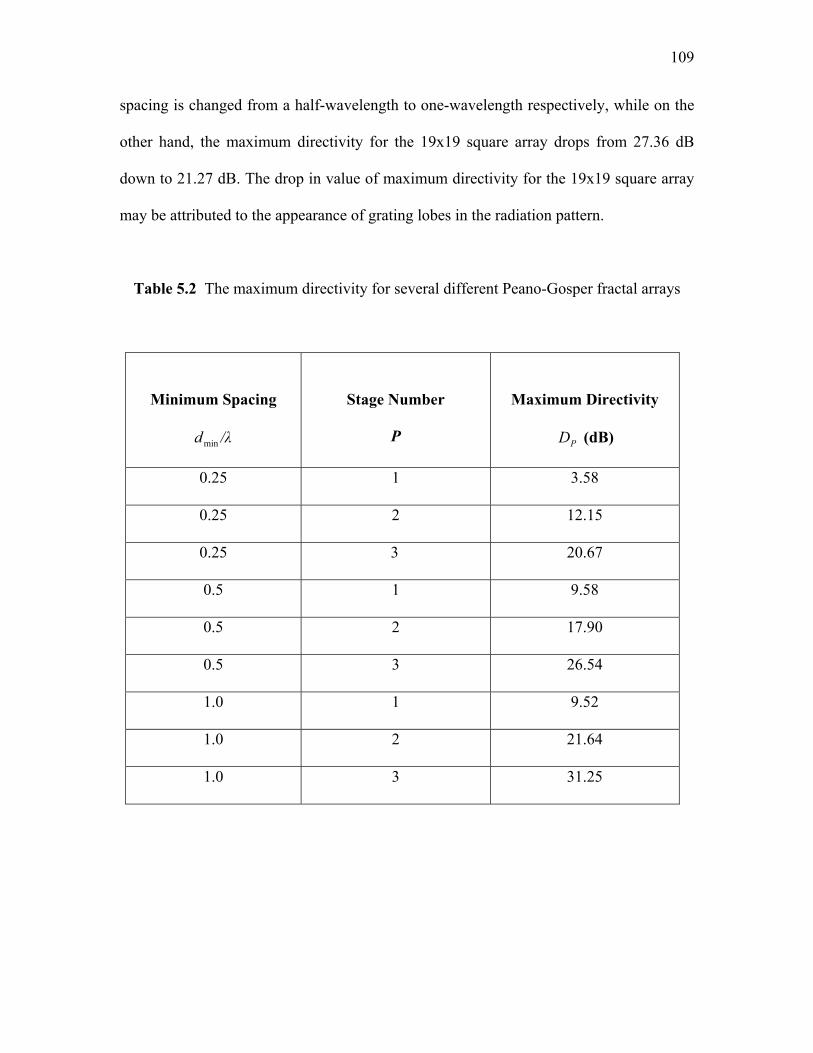
109
spacing is changed from a half-wavelength to one-wavelength respectively, while on the
other hand, the maximum directivity for the 19x19 square array drops from 27.36 dB
down to 21.27 dB. The drop in value of maximum directivity for the 19x19 square array
may be attributed to the appearance of grating lobes in the radiation pattern.
Table 5.2 The maximum directivity for several different Peano-Gosper fractal arrays
Minimum Spacing
/λdmin
Stage Number
P
Maximum Directivity
PD (dB)
0.25 1 3.58
0.25 2 12.15
0.25 3 20.67
0.5 1 9.58
0.5 2 17.90
0.5 3 26.54
1.0 1 9.52
1.0 2 21.64
1.0 3 31.25

110
Table 5.3 Comparison of maximum directivity for a stage 3 Peano-Gosper array with 344 elements and a 19x19 square array with 361 elements
Maximum Directivity (dB)
Element Spacing
dmin / λ
Stage 3 Peano-Gosper Array
19x19 Square Array
0.25
20.67 21.42
0.5
26.54 27.36
1.0
31.25 21.27
Next, we consider the case where the mainbeam of the Peano-Gosper fractal array
is steered in the direction corresponding to θ = θo and ϕ = ϕo. In order to accomplish
this, the element phases for the Peano-Gosper fractal array are chosen according to
)cos(sin noonn kr ϕϕθβ −−= (5.30)
Normalized array factor plots with the mainbeam steered to θo = 45° and ϕo = 0° are
shown in Figure 5.15; one for a Stage 3 Peano-Gosper fractal array where the minimum
spacing between elements is a half-wavelength (solid curve) and the other for a
conventional 19x19 uniformly excited square array with half-wavelength element
spacings (dashed curve). This comparison demonstrates that the Peano-Gosper array is
superior to the 19x19 square array in terms of its overall sidelobe characteristics.

111
-80 -60 -40 -20 0 20 40 60 80 -80
-70
-60
-50
-40
-30
-20
-10
0
Theta (degrees)
Arra
y Fa
ctor
(dB)
Figure 5.15 Plots of the normalized array factor versus θ for ϕ = 0° with mainbeam steered to θo = 45° and ϕo = 0°. The solid curve represents the radiation pattern of a stage 3 Peano-Gosper fractal array with 2/min λ=d and the dashed curve represents the radiation pattern of a uniformly excited 19x19 square array with 2/min λ=d
Finally, we note that Peano-Gosper arrays are self-similar since they may be
formed in an iterative fashion so that the array at stage P is composed of seven identical
stage P-1 sub-arrays, i.e., they consist of arrays of arrays. For example, the Stage 2
Peano-Gosper array is composed of seven Stage 1 sub-arrays. Likewise, the Stage 3
Peano-Gosper array consists of seven Stage 2 sub-arrays, and so on. Figure 5.16
illustrates schematically this unique arrangement or tiling of sub-arrays for a Stage 2 and
a Stage 4 Peano-Gosper array.

112
Figure 5.16 Modular architecture of the Peano-Gosper array based on the tiling of Gosper islands. A stage 2 and stage 4 Peano-Gosper array are shown divided up into seven stage 1 and stage 3 Peano-Gosper sub-arrays respectively
This lends itself to a convenient modular architecture whereby each of these sub-arrays
could be individually controlled. In other words, the unique arrangement of tiles forms
sub-arrays that could be designed to support simultaneous multibeam and multifrequency
operation.
Stage 1
Stage 2
Stage 4

113
5.4 Conclusions
A new class of self-similar fractal arrays, called Peano-Gosper fractal arrays, have
been introduced in this chapter. The elements are uniformly distributed along a self-
avoiding Peano-Gosper curve, which results in a deterministic fractal array configuration
composed of a unique arrangement of parallelogram cells bounded by an irregular closed
Koch curve. One of the main advantages of these Peano-Gosper fractal arrays is that they
are relatively broadband compared to conventional periodic planar phased arrays with
regular boundary contours. In other words, they possess no grating lobes even for
minimum element spacings of at least one-wavelength. An efficient iterative procedure
useful for rapidly calculating the radiation patterns of Peano-Gosper fractal arrays to
arbitrary stage of growth P was also presented.

114
Chapter 6
Other Broadband Arrays Produced by Fractal Tilings
6.1 The Terdragon and the 6-Terdragon Arrays
The terdragon is one type of fractal comprised of conjoined triangles tiling a region.
The construction of a terdragon may be described as follows:
1. Start with an initiator (line segment) shown in Figure 6.1(a).
Figure 6.1(a) Initiator for a terdragon curve
2. At stage 1, replace each individual line with the generator which is scaled by a
factor ( )°=30cos2
1s and rotated clockwise by an angle of 30°
Figure 6.1(b) Construction of a stage 1 terdragon curve. The solid curve denotes the generator whereas the dashed curve denotes the initiator

115
3. For further stages, repeat step 2.
Figure 6.1(c) Construction of a stage 2 terdragon curve. The solid curve denotes the generator for the terdragon curve or the stage 2 terdragon curve whereas the dashed curve denotes the stage 1 terdragon curve
Figure 6.2 shows the stage 6 terdragon curve generated by applying the construction
procedure introduced earlier.
Figure 6.2 Stage 6 terdragon curve

116
The 6-terdragon curve may now be constructed by joining together six terdragon
curves around a common central point. The construction of a 6-terdragon curve at stage 1
is illustrated in Figure 6.3. Figure 6.3 shows that the 6-terdragon may be generated by six
terdragons; each of which is rotated by an angle of 2(i-1)π /3, i = 1, 2,....3. The stage 3 6-
terdragon curve is shown in Figure 6.4.
Figure 6.3 The first stage in the construction of a 6-terdragon curve. The initiator is shown as the dashed line superimposed on the stage 1 generator.
Figure 6.4 Stage 3 6-terdragon curve

117
6.1.1 Construction of the Terdragon Fractal Array
A Stage 1, Stage 3, and Stage 6 fractal array based on the terdragon are shown in
Figure 6.5.
1
2
2
1
2
1
2
4
4
4
2
2
6
6
2
2
4
4
4
2
1
2
Stage 1 Stage 3
2
2
2
4
2
6
4
2
4
4
1
2
4
6
6
6
2
2
6
4
4
66
4
4
6
2
2
6
6
6
6
2
2
4
6
4
2
4
6
6
6
6
6
4
2
2
6
6
6
4
2
4
6
6
6
6
6
6
6
6
4
2
4
6
6
6
2
2
4
6
6
6
6
6
6
2
4
2
6
6
4
2
2
6
2
6
6
6
6
6
6
4
2
2
4
6
4
6
2
6
4
4
4
6
6
4
6
2
6
6
6
6
6
6
6
6
6
6
4
6
6
6
6
4
6
6
2
6
6
6
6
6
6
2
6
6
6
6
6
6
6
6
6
2
6
4
6
6
6
6
4
6
2
2
6
4
6
6
6
6
4
6
2
6
6
6
6
6
6
6
6
6
2
6
6
6
6
6
6
2
6
6
4
6
6
6
6
4
6
6
6
6
6
6
6
6
6
6
2
6
4
6
6
4
4
4
6
2
6
4
6
4
2
2
4
6
6
6
6
6
6
2
6
2
2
4
6
6
2
4
2
6
6
6
6
6
6
4
2
2
6
6
6
4
2
4
6
6
6
6
6
6
6
6
4
2
4
6
6
6
2
2
4
6
6
6
6
6
4
2
4
6
4
2
2
6
6
6
6
2
2
6
4
4
66
4
4
6
2
2
6
6
6
4
2
1
4
4
2
4
6
2
4
2
2
2
Figure 6.5 Element locations and associated current distribution for the stage 1, stage 3, and stage 6 terdragon fractal arrays with the minimum spacing between elements and expansion factor denoted by dmin and δ, respectively. The spacing dmin is assumed to be the same for each stage
Stage 6

118
Figure 6.5 also shows the location of the elements and their corresponding current
excitation values. The minimum spacing between array elements is held fixed at a value
of dmin for each stage of growth. The array factor of a stage P terdragon fractal array may
be expressed in terms of P 3x3 matrices which are pre-multiplied by a vector AP and
post-multiplied by a vector C such that
( ) CBA PP=ϕθ ,PAF (6.1)
where
[ ]321 aaa=PA (6.2)
( )( )[ ]αϕϕθ 1cossincos2 min −+−= Pkda ii (6.3)
( )3
21 πϕ −= ii (6.4)
[ ]T001=C (6.5)
∏=
−==P
pP1PpP FBFB
1
(6.6)
[ ]( )33xp
ijf=pF (6.7)

119
[ ]∑∈
+−+−−=ijNn
njnpp
ij pPjkrf ])1(cos[sinexp αγϕϕθ (6.8)
221nn
pnp yxr += −δ (6.9)
<+
=
>
=
0,arctan
0,0
0,arctan
nn
n
n
nn
n
n
xxy
x
xxy
π
γ (6.10)
3,2,1where3
2)1( =−= jjjπϕ (6.11)
°= 30α (6.12)
( )°= 30cos2δ (6.13)
Note that the parameter δ represents the scale factor used to generate the terdragon and
the 6-terdragon fractal arrays. Also, we note that if Nij = φ , then ,0=pijf where the values
of ijN required in (6.8) are found from
[ ]( )
{ } { }{ } { }
{ } { }
==
3,123,12
23,1
33
φφ
φ
xijNN (6.14)
The values of xn and yn required in (6.9) and (6.11) for n = 1-3 are listed in Table 6.1.

120
Table 6.1 Expressions of xn and yn in terms of the parameters dmin, α and δ
n
xn
yn
1 -δdmin/2 -δdmin/4
2 0 0
3 δdmin/2 δdmin/4
6.1.2 Construction of the 6-Terdragon Fractal Array
The first three stages (i.e., P = 1, P = 2, and P = 3) in the construction of a fractal
array based on the 6-terdragon curve are shown in Figure 6.6.
1
1
4
4
1
4
6
4
1
4
4
1
1
1
2
4
2
1
4
4
1
4
6
4
2
6
6
4
6
4
6
6
2
4
6
4
1
4
4
1
2
4
2
1
Stage 1 Stage 2

121
2
1
2
4 4
4
2
2
2
1
2
4
6
6
4
4
4
1
2
4
4
6
6
6
6
6
4
2
4
6
6
6
6
6
6
2
4
6
6
6
6
6
4
2
6
6
6
6
6
6
4
2
4
6
6
6
6
6
4
4
2
1
4
4
4
6
6
4
2
1
2
2
2
4
4
4
2
1
2
Stage 3
Figure 6.6 Element locations and associated current distribution for the stage 1, stage 2 and stage 3 6-terdragon fractal arrays with the minimum spacing between elements and expansion factor denoted by dmin and δ respectively. The spacing dmin is assumed to be the same for each stage Figure 6.6 also shows the location of the elements and their corresponding current
excitation values. The minimum spacing between array elements is held fixed at a value
of dmin for each stage of growth. The array factor of a stage P 6-terdragon fractal array
may be expressed in terms of P 3x3 matrices which are pre-multiplied by a vector AP and
post-multiplied by a vector CP such that
( ) PPP CBA=ϕθ ,PAF (6.15)
[ ]TPPP ccc 3,2,1,=PC (6.16)

122
( )( )iP
iP dkc ϕϕθδ −= − cossincos2 min1
, (6.17)
The matrices AP and BP are defined in (6.2) and (6.6).
6.1.3 Radiation Characteristics of the Terdragon and 6-Terdragon Fractal Arrays
Figure 6.7 Plot of the normalized array factor for the stage 6 terdragon fractal array with minimum spacing dmin = λ in terms of nx and ny
The maximum allowable angle steered from broadside of the stage 6 terdragon
fractal array may be determined from Figure 6.7. By choosing (nx, ny) = (0.95, 0.6) in
Figure 6.7 to be on the boundrary of the visible region, the maximum allowable angle
steered from broadside (θ max) may be obtained using (1.18), ( )1arcsinmax −= bθ , where b
ny
nx
dB

123
is the distance from the origin to the chosen threshold point. The distance b may be
obtained as 1236.16.095.0 22 =+ . Consequently, the maximum allowable angle θ max,
for minimum spacing of dmin = λ, is .09.7 o For minimum spacings dmin = 0.5 λ to λ, the
maximum allowable angle steered from broadside may be obtained by modifying (1.18)
as:
>
−°
≤
−≤
−
=11,90
110,1arcsin
min
minminmax
bd
bd
bd
λ
λλ
θ (6.18)
A plot of maximum allowable angleθ max versus dmin is shown in Figure 6.8.
0.5 0.55 0.6 0.65 0.7 0.75 0.8 0.85 0.9 0.95 10
10
20
30
40
50
60
70
80
90
Minimum Spacing dmin
Max
imum
Allo
wab
le S
teer
ed A
ngle
(deg
rees
)
Figure 6.8 Plot to show maximum allowable angle (θmax) versus minimum spacing between adjacent elements dmin in λ for the stage 6 terdragon fractal array

124
Figure 6.9 Plot of the normalized array factor for the stage 3 6-terdragon fractal array with minimum spacing dmin = λ in terms of nx and ny
The maximum allowable angle steered from broadside for the stage 3 6-terdragon
fractal array may be determined from Figure 6.9. By choosing (nx, ny) = (0.5, 0.9) in
Figure 6.9 to be on the boundary of the visible region, the maximum allowable angle
steered from broadside (θ max) may be obtained from (1.18), ( )1arcsinmax −= bθ , where b
is the distance from the origin to the chosen threshold point. The distance b may be
obtained as 029.19.05.0 22 =+ . Consequently, the maximum allowable angle θ max, for
minimum spacing of dmin = λ, is .66.1 o For minimum spacings dmin = 0.5 λ to λ, the
maximum allowable angle steered from broadside obtained using (6.18) is shown in
Figure 6.10 which contains a plot of the maximum allowable angleθ max versus dmin.
ny
nx
dB
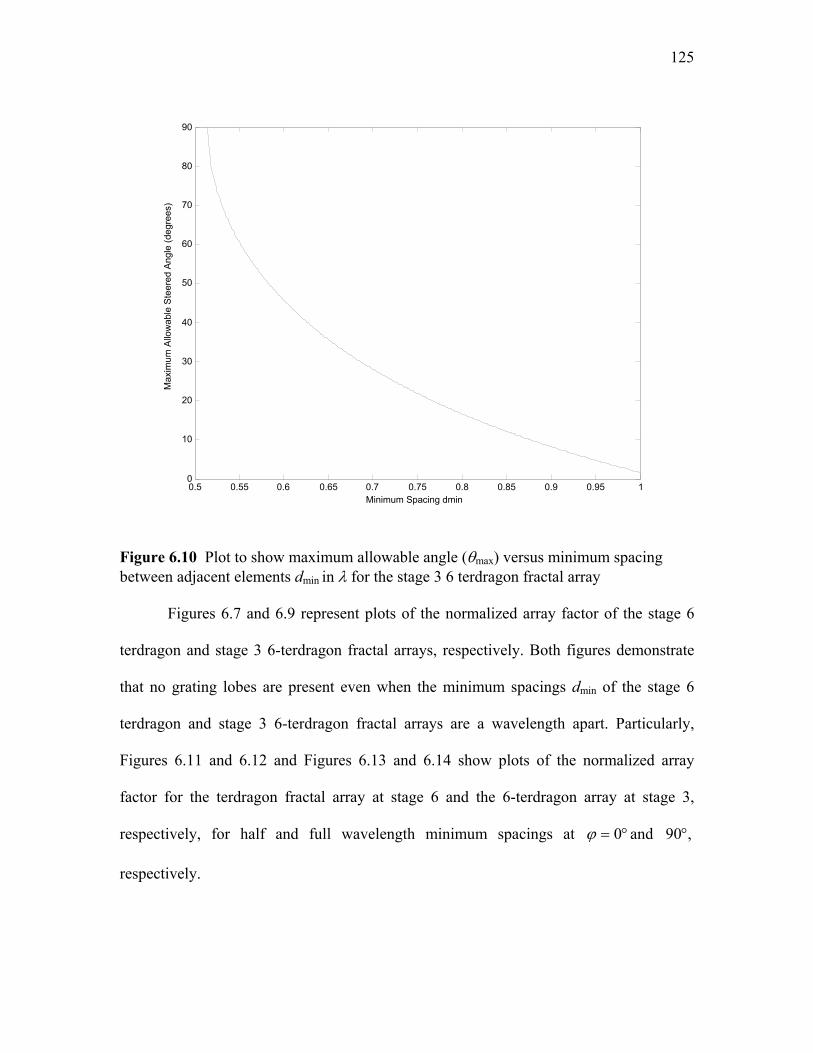
125
Figure 6.10 Plot to show maximum allowable angle (θmax) versus minimum spacing between adjacent elements dmin in λ for the stage 3 6 terdragon fractal array
Figures 6.7 and 6.9 represent plots of the normalized array factor of the stage 6
terdragon and stage 3 6-terdragon fractal arrays, respectively. Both figures demonstrate
that no grating lobes are present even when the minimum spacings dmin of the stage 6
terdragon and stage 3 6-terdragon fractal arrays are a wavelength apart. Particularly,
Figures 6.11 and 6.12 and Figures 6.13 and 6.14 show plots of the normalized array
factor for the terdragon fractal array at stage 6 and the 6-terdragon array at stage 3,
respectively, for half and full wavelength minimum spacings at °= 0ϕ and ,90°
respectively.
0.5 0.55 0.6 0.65 0.7 0.75 0.8 0.85 0.9 0.95 1 0
10
20
30
40
50
60
70
80
90
Minimum Spacing dmin
Max
imum
Allo
wab
le S
teer
ed A
ngle
(deg
rees
)

126
0 10 20 30 40 50 60 70 80 90-80
-70
-60
-50
-40
-30
-20
-10
0
Theta (degrees)
Ar
ray
Fact
or (d
B)
Figure 6.11 Plot of the normalized stage 6 terdragon fractal array factor versus θ with ϕ = 0° for dmin = λ/2 (dashed curve) and dmin = λ (solid curve)
0 10 20 30 40 50 60 70 80 90 -80
-70
-60
-50
-40
-30
-20
-10
0
Theta (degrees)
Arra
y Fa
ctor
(dB)
Figure 6.12 Plot of the normalized stage 6 terdragon fractal array factor versus θ with ϕ = 90° for dmin = λ/2 (dashed curve) and dmin = λ (solid curve)

127
0 10 20 30 40 50 60 70 80 90 -80
-70
-60
-50
-40
-30
-20
-10
0
Theta (degrees)
A
rray
Fac
tor (
dB)
Figure 6.13 Plot of the normalized stage 3 6-terdragon fractal array factor versus θ with ϕ = 0° for dmin = λ/2 (dashed curve) and dmin = λ (solid curve)
0 10 20 30 40 50 60 70 80 90 -80
-70
-60
-50
-40
-30
-20
-10
0
Theta (degrees)
A
rray
Fac
tor (
dB)
Figure 6.14 Plot of the normalized stage 3 6-terdragon fractal array factor versus θ with ϕ = 90° for dmin = λ/2 (dashed curve) and dmin = λ (solid curve)

128
Figure 6.15 and Figure 6.16 show plots of the normalized array factor (in dB) for the
case where dmin = λ and θ = 90° versus azimuth for the stage 6 terdragon and the stage 3
6-terdragon fractal array, respectively. These plots show that no grating lobes are present
anywhere in the azimuthal plane of the stage 6 terdragon and stage 3 6-terdragon fractal
arrays, even with elements spaced one-wavelength apart. In fact, the highest sidelobes in
the azimuthal plane are -19 dB and -16.8 dB, respectively, when the mainbeam is at θ =
0°. For example, the highest sidelobe occurs at ϕ = 97° for th stage 6 terdragon fractal
array when θ = 90° and dmin = λ (Figure 6.15). In the case of the stage 3 6-terdragon
fractal array, the highest sidelobe occurs at ϕ = 11° under the same conditions (see Figure
6.16).
0 50 100 150 200 250 300 350 -80
-70
-60
-50
-40
-30
-20
-10
0
Phi (degrees)
Arr
ay F
acto
r (dB
)
Figure 6.15 Plot of the normalized stage 6 terdragon fractal array factor versus ϕ for θ = 90° and dmin = λ

129
0 50 100 150 200 250 300 350 -80
-70
-60
-50
-40
-30
-20
-10
0
Phi (degrees)
Arra
y Fa
ctor
(dB
)
Figure 6.16 Plot of normalized stage 3 6-terdragon fractal array factor versus ϕ for θ = 90° and dmin = λ
0 10 20 30 40 50 60 70 80 90 -80
-70
-60
-50
-40
-30
-20
-10
0
Theta (degrees)
Arra
y Fa
ctor
(dB
)
Figure 6.17 Plot of the normalized stage 6 terdragon fractal array factor versus θ for ϕ = 97°

130
0 10 20 30 40 50 60 70 80 90 -80
-70
-60
-50
-40
-30
-20
-10
0
Theta (degrees)
Arr
ay F
acto
r (dB
)
Figure 6.18 Plot of the normalized stage 3 6-trdragon fractal array factor versus θ for ϕ = 11°
As in the case of the Peano-Gosper fractal arrays [62], these curves show that for
terdragon and 6-terdragon fractal arrays that no grating lobes appear in the radiation
pattern when the minimum spacing is changed from half-wavelength to at least a full-
wavelength. For comparison purposes, we consider a uniformly excited periodic 18x18
square array of comparable size to the stage 6 terdragon array, which contains a total of
308 elements and a uniformly excited periodic 9x9 square array of comparable size to the
stage 3 6-terdragon fractal array, which contains a total of 79 elements. Plots of the
normalized array factor for the 18x18 square and the 9x9 square array are shown in
Figure 6.19 and Figure 6.20, respectively, for element spacings of dmin = λ/2 (dashed
curve) and dmin = λ (solid curve). A grating lobe is clearly visible for the case in which
the elements are periodically spaced one wavelength apart. The solid curves shown in
Figures 6.21 and 6.22 are plots of the stage 6 terdragon and stage 3 6-terdragon arrays,

131
respectively, for the case where the minimum spacing between elements is increased to
two wavelengths (i.e., dmin = 2λ).
0 10 20 30 40 50 60 70 80 90 -80
-70
-60
-50
-40
-30
-20
-10
0
Theta (degrees)
A
rray
Fac
tor (
dB)
Figure 6.19 Plot of the normalized array factor versus θ at ϕ = 0° for a uniformly excited 18x18 periodic square array with dmin = λ/2 (dashed curve) and dmin = λ (solid curve)
0 10 20 30 40 50 60 70 80 90 -90
-80
-70
-60
-50
-40
-30
-20
-10
0
Theta (degrees)
A
rray
Fac
tor (
dB)
Figure 6.20 Plot of the normalized array factor versus θ with ϕ = 0° for a uniformly excited 9x9 periodic square array with dmin = λ/2 (dashed curve) and dmin = λ (solid curve)

132
For comparison, plots of the array factor for a uniformly excited 18x18 and 9x9 square
array with elements spaced two wavelengths apart have been included in Figure 6.21 and
Figure 6.22, respectively. The two grating lobes that are present in the radiation pattern of
the conventional 18x18 square and 9x9 square arrays are clearly evident in these plots.
The array factor of a stage P terdragon, 6-terdragon, or NxN square array with NP
elements may be expressed in the alternative form:
[ ]∑∑==
+−=•=PP N
nnnnn
N
nnnnP krjInrjkjIAF
11
)cos(sinexp)ˆexp()exp(),( βϕϕθβϕθ r
(6.19)
where nI and nβ represent the excitation current amplitude and phase of the nth
element, nrr is the horizontal position vector of the nth element (with magnitude rn and
phase angle ϕn), and n is the unit vector in the direction of the far-field observation point.
An expression for the maximum directivity of a broadside stage P terdragon, 6-terdragon,
or NxN square array of isotropic sources can be readily obtained by setting 0=nβ in
(6.19) and substituting the result into
∫ ∫= ππ
ϕθθϕθπ
ϕθ2
0 0
2
2
max
sin),(41
),(
ddAF
AFD
P
PP (6.20)

133
0 10 20 30 40 50 60 70 80 90 -80
-70
-60
-50
-40
-30
-20
-10
0
Theta (degrees)
A
rray
Fac
tor (
dB)
Figure 6.21 Plot of the normalized array factor versus θ with ϕ = 0° with dmin = 2λ for the stage 6 terdragon fractal array (solid curve) and a uniformly excited 18x18 square array (dashed curve)
0 10 20 30 40 50 60 70 80 90 -80
-70
-60
-50
-40
-30
-20
-10
0
Theta (degrees)
Arr
ay F
acto
r (dB
)
Figure 6.22 Plot of the normalized array factor versus θ for ϕ = 0° and dmin = 2λ for the stage 3 6-terdragon fractal array (solid curve) and a uniformly excited 18x18 square array (dashed curve)

134
This leads to the following expression for the maximum directivity given by [2]:
( )( )∑∑∑
∑
=
−
==
=
−−
+
=PP
P
N
m
m
n mn
mnmn
N
nn
N
nn
P
rrkrrk
III
ID
2
1
11
2
2
1
sin2 rr
rr (6.21)
Table 6.2 Maximum directivity for several different terdragon fractal arrays
Minimum Spacing
/λdmin
Stage Number
P
Maximum Directivity
PD (dB)
0.25 1 1.5
0.25 3 6.2
0.25 6 19.5
0.5 1 5.7
0.5 3 12.4
0.5 6 25.6
1.0 1 5.6
1.0 3 13.4
1.0 6 29.8

135
Table 6.3 Maximum directivity for several different 6-terdragon fractal arrays.
Minimum Spacing
/λdmin
Stage Number
P
Maximum Directivity
PD (dB)
0.25 1 4.0
0.25 2 8.8
0.25 3 13.4
0.5 1 10.7
0.5 2 15.0
0.5 3 19.4
1.0 1 10.8
1.0 2 17.9
1.0 3 23.8
Tables 6.2 and 6.3 show the maximum directivity values, calculated using (6.21) for the
terdragon and 6-terdragon arrays, respectively, for several different minimum element
spacings dmin and stages of growth P. Tables 6.4 and 6.5 compare maximum directivity
values of a stage 6 terdragon fractal array with those of a conventional uniformly excited
18x18 planar square array, and a comparison between the maximum directivity of a stage
3 6-terdragon fractal array, with those of a conventional uniformly excited 9x9 planar
square array, respectively. These directivity comparisons are made for three different
values of array element spacings (i.e. dmin = λ/4, λ/2, and λ). In the first case, where the

136
element spacing is assumed to be dmin = λ/4, we find that the maximum directivity values
of the stage 6 terdragon array and the 18x18 square array are comparable and so are those
of the stage 3 6-terdragon array and 9x9 square array. This is also true when the element
spacing is increased to dmin = λ/2 (see Table 6.4 and Table 6.5).
Table 6.4 Comparison of maximum directivity of a stage 6 terdragon array of 308 elements with a 18x18 square array of 324 elements
Maximum Directivity (dB) Element Spacing
(dmin/λ) Stage 6 Terdragon Array 18x18 Square Array
0.25 19.48 21.0
0.5 25.6 26.9
1 29.83 20.9
Table 6.5 Comparison of maximum directivity of a stage 3 6-terdragon array of 79 elements with a 9x9 square array of 81 elements
Maximum Directivity (dB)
Element Spacing
(dmin/λ) Stage 3 6-Terdragon Array 9x9 Square Array
0.25 13.36 15.0
0.5 19.38 20.7
1 23.75 16.3

137
However, in the third case where the element spacing is increased to dmin = λ, we
see that the maximum directivity values of the stage 6 terdragon fractal array and the
stage 3 6-terdragon fractal array are higher than the corresponding conventional array by
about 9 and 7 dB, respectively. This is because the maximum directivity for the stage 6
terdragon fractal array and the stage 3 6-terdragon array increase from 25.6 to 29.8 and
from 19.4 to 23.8, respectively, when the element spacing is changed from a half to full-
wavelength, while, on the other hand, the maximum directivity value for the 18x18 and
9x9 square arrays drop from 26.9 to 20.9 and from 20.7 to 16.3, respectively. This drop in
the maximum directivity value may be attributed to the appearance of grating lobes in the
radiation pattern.
Next, we consider the case where the mainbeam of the terdragon and the 6-
terdragon fractal arrays are steered in the direction corresponding to θ = θo and ϕ = ϕo. In
order to accomplish this, the element phases for the terdragon and the 6-terdragon fractal
arrays are chosen according to
)cos(sin noonn kr ϕϕθβ −−= (6.22)
Normalized array factor plots with the mainbeam steered to θo = 45° and ϕo= 0° are
shown in Figure 6.23 and Figure 6.24. The solid curves represent plots for the stage 6
terdragon and stage 3 6-terdragon fractal arrays, respectively, and the dashed curves
represent those for the conventional 18x18 and 9x9 uniformly excited square arrays. The
minimum spacing between elements for these cases is a half-wavelength. This
comparison demonstrates that the terdragon and the 6-terdragon fractal arrays are
superior to the 18x18 and 9x9 square arrays, respectively, with diminished overall
sidelobe characteristics.

138
-80 -60 -40 -20 0 20 40 60 80 -80
-70
-60
-50
-40
-30
-20
-10
0
Theta (degrees)
Arra
y Fa
ctor
(dB)
Figure 6.23 Plots of the normalized array factor versus θ for ϕ = 0° and dmin = λ/2 with mainbeam steered to θo = 45° and ϕo = 0°. The solid curve represents the radiation pattern of a stage 6 terdragon fractal array, and the dashed curve represents the radiation pattern of a uniformly excited 18x18 square array
-80 -60 -40 -20 0 20 40 60 80 -80
-70
-60
-50
-40
-30
-20
-10
0
Theta (degrees)
Arra
y Fa
ctor
(dB)
Figure 6.24 Plots of the normalized array factor versus θ for ϕ = 0° and dmin = λ/2 with mainbeam steered to θo = 45° and ϕo = 0°. The solid curve represents the radiation pattern of a stage 3 6-terdragon fractal array, and the dashed curve represents the radiation pattern of a uniformly excited 9x9 square array

139
6.1.4 Conclusions
A new class of self-similar tiled arrays, called terdragon and 6-terdragon fractal
arrays, has been introduced in Section 6.1. Similar to the case of the Peano-Gosper fractal
arrays, the elements of the terdragon and 6-terdragon fractal arrays are uniformly
distributed along terdragon and 6-terdragon curves, respectively, which result in
deterministic array configurations. As is true with the Peano-Gosper fractal arrays, one
of the main advantages of these terdragon and 6-terdragon fractal arrays is that they are
relatively broadband compared to conventional periodic phased arrays. In other words,
they possess no grating lobes even for minimum spacings of at least one-wavelength.
Efficient iterative procedures useful for rapidly calculating the radiation patterns of
terdragon and 6-terdragon fractal arrays to arbitary stage of growth P were also
presented.

140
Chapter 7
Coordinate Transformation for 3-D Antenna Arrays and its Application to Beamforming
Three-dimensional antenna arrays are arrays of antenna elements that occupy
three-dimensional space. These antenna arrays are presumably better as directional
antenna arrays than their planar counterparts since the occupied area projected onto the
plane perpendicular to the mainbeam direction of 3-D antenna arrays is less sensitive to
the variations in mainbeam direction. This chapter introduces coordinate transformations
applicable to direction scanning of 3-D antenna arrays. This is used for beamforming of
the 3-D fractal antenna arrays introduced in the next chapter.
Consider an N-element antenna array located in three-dimensional space. Suppose
that the nth element of the 3-D array is located at the rectangular coordinate (xn, yn, zn)
shown in Figure 7.1 with the position vector nrr . Suppose that the nth element of the array
has current amplitude excitation In and relative phase βn. In terms of the position
vector nrr , the array factor of this 3-D antenna array can be expressed as:
∑=
+•=N
nnnn nrkjInAF
1
)]ˆ([exp)ˆ( βr (7.1)
where n is a unit vector in the direction of the field point.

141
θ
ϕ
the rectangular coordinates (xn,yn,zn) or the cylindrical coordinates ( )nnn z,,ϕρ
x
y
z
mainbeam direction ϕ = ϕo and θ = θo
and unit direction vector 'z
the nth element
z′
unit direction vector x′ in direction of θ = θo+π and ϕ = -ϕo
a plane perpendicular to the mainbeam direction
x′
y′
nr
r
nρ
Figure 7.1 Rectangular coordinates (xn,yn,zn) and cylindrical coordinates ( )nnn z,,ϕρ and projection plane in the direction of ϕ = ϕo and θ = θo

142
The expression for the array factor in terms of rectangular coordinates (xn, yn, zn)
is very complicated. Therefore, in order to avoid this complexity, we transform the
expression from the rectangular coordinates ( )nnn zyx ,, to the cylindrical coordinates
)( n nn z,, ′′′ ϕρ . This can be performed in two steps. First, we transform the coordinate
(xn,yn,zn) to the coordinate )( nnn z,y,x ′′′ by using a transformation T determined by (7.2),
=
′′′
n
n
n
n
n
n
zyx
Tzyx
(7.2)
The transformation T may be represented using two matrices associated with rotation and
translation. In other words, the transformation T may be represented using matrices Tr
and Tt. Hence, the expression in (7.2) may be represented in matrix form as:
tr TT +
=
′′′
n
n
n
n
n
n
zyx
zyx
(7.3)
The matrix Tr may be found by the relation between the unit vectors x , y and z
associated with the rectangular coordinates ),,( nnn zyx and the unit vectors x′ˆ , y′ˆ and
z′ˆ associated with the coordinates ),,( nnn zyx ′′′ , where the unit vector z′ˆ is in the
mainbeam direction and the unit vectors x′ˆ and y′ˆ are orthogonal to each other and
aligned on a plane perpendicular to the mainbeam direction. The unit vector x′ˆ may be

143
selected to be a unit vector in the direction of θ = θo+π/2 and ϕ = ϕo. By the right hand
rule, the unit vector y′ˆ may be defined as x zy ′×′=′ ˆˆˆ . Hence, yx ′′ ˆ,ˆ and z′ˆ may be
expressed as:
−=
′′′
zyx
zyx
ˆˆˆ
cossinsincossin0cossin
sin-sincoscoscos
ˆˆˆ
ooooo
oo
ooooo
θϕθϕθϕϕ
θϕθϕθ (7.4)
This implies that the matrix Tr corresponding to (7.4) is:
−=
ooooo
oo
ooooo
cossinsincossin0cossin-
sinsincoscoscos
θϕθϕθϕϕ
θϕθϕθ
rΤ (7.5)
and the matrix Tt may be expressed as:
−=
c00000000
tT (7.6)
The constant c in (7.6) is arbitrary. For simplicity, the constant c is selected so that max
{zn}= 0. Therefore, the coordinates ),,( nnn zyx ′′′ may be expressed as (7.7)

144
−+
−=+
=
′′′
czyx
zyx
zyx
n
n
n
n
n
n
n
n
n
00000000
cossinsincossin0cossin-
sinsincoscoscos
ooooo
oo
ooooo
θϕθϕθϕϕ
θϕθϕθ
tr TT (7.7)
The next step is to transform the rectangular coordinates )z,,( nnn yx ′′′ to the
coordinates ),( nnn z, ′′′ ϕρ shown in Figure 7.2.
y′
z '
θ ′
ϕ′
( )nnn z′′′ ,,ϕρ
The plane perpendicular to the direction ϕ =ϕo and θ = θo or the unit direction vector z′ˆ in Fig. 7.1
x′
nr ′
Figure 7.2 Projection plane and the cylindrical coordinate system

145
The array factor in (7.1) can be rewritten as:
∑=
′++′−′′′=′′N
nnnnnn zkθkjI,θAF
1)])(cossin([exp)( βϕϕρϕ (7.8)
The mainbeam can be steered to the direction of θ = θo and ϕ = ϕo or in the direction of
the z′ -axis shown in Figures 7.1 and 7.2, by setting the phase term of (7.8) to be in phase
in the direction of 0θ =′ . This leads to the equation
0constant ==′+ nn zkβ . (7.9)
Hence, the phase βn can be expressed as:
'zcf'kz nnn πβ 2−=−= (7.10)
The phase βn is obviously proportional to the frequency f. It should be noted that the
array factor of the planar array whose mainbeam is steered to the direction of θ = θo and
ϕ =ϕo can be expressed as:
])cos()sin([e),( nN
1n
nnn
θkjIθAF βϕϕρϕ +−= ∑=
(7.11)
where
( ) ( )nnn k ϕϕθρβ −−= oo cossin , (7.12)
k = 2π/λ (the wave number in free space)

146
nρ and ϕn are the associated polar coordinates of the nth element and
In is the relative current amplitude excitation of the nth element
may be derived using the principle introduced earlier, i.e., by setting the constant c = 0 in
(7.7), we find that the planar arrays discussed in previous sections can be treated as a
particular case of 3-D arrays. Obviously, by inspection, 'zn may be expressed as:
( ) ( )noonnz ϕϕθρ −=′ cossin (7.13)
Therefore, by applying (7.10), the phase βn of the nth element in (7.12) may be easily
derived.

147
Chapter 8
3-D Fractal Arrays Using Concentric Sphere Array Generators
8.1 Introduction
Three-dimensional volumetric fractal arrays have elements that are located in
three dimensional space. Their structures exhibit a property known as “self-similarity”.
Different from that of the 2-D (planar) arrays, the area projected to the plane
perpendicular to the mainbeam direction of the 3-D arrays is not significantly dependent
on the mainbeam direction. Hence, 3-D fractal arrays would supposedly perform better as
directional arrays than 2-D fractal arrays. For simplicity, in this chapter, only fractal
arrays generated using a concentric sphere array generator are investigated. Unlike fractal
planar antenna arrays, 3-D fractal arrays frequently contain more than one element in the
mainbeam direction. In practice, real elements always exert mutual coupling on each
other. However, the analysis and synthesis performed in this chapter neglects all mutual
effects between elements since these effects depend upon individual element geometries.
This chapter will focus on the synthesis of Menger sponge and 3-D Sierpinski gasket
arrays. Analysis of these arrays is discussed only briefly since the analysis of 3-D arrays
is much more complicated than that of 2-D arrays.

148
8.2 Synthesis of 3-D Fractal Arrays Using Concentric Sphere Array Generators
The synthesis of 3-D fractal arrays is more complicated than the synthesis of 2-D
fractal arrays. For simplicity, only 3-D fractal arrays using concentric sphere subarrays
are discussed in this chapter. The array factor of a 3-D fractal array generated using
sphere subarray generators may be expressed as:
,)()(1
11∏
=
− Ψ=ΨP
p
pP AFAF
rrδ (8.1)
where
( ) ( ) ( )[ ]kjik ˆcosˆsinsinˆcossin θϕθϕθ ++=Ψr
(8.2)
and ),(1 Ψr
AF the array factor of the generator (stage 1) in (8.1), is given by
])(cossin[exp),(),(1
1 nnnn
N
nn jkzjθjkIAFAF ++−== ∑
=
βϕϕρϕθϕθ (8.3)
As described in Chapter 7, the array factor ( )ϕθ,1AF may be expressed in the coordinates
),( ϕθ ′′ using (7.8):
( ) ∑=
′++′−′′′=′′=N
nnnnnn zkθkjI,θAFAF
111 )])(cossin([exp)(, βϕϕρϕϕθ (8.4)
The mainbeam can be steered to the direction of the axisz′+ by controlling the phase in
the appropriate way. The phase may be expressed as:

149
.'kznn −=β (8.5)
The procedure for synthesizing these fractal arrays is outlined below:
a. Define an initiator and subarray generator of the specific 3-D fractal antenna array. Specify the current excitation of each individual element and the mainbeam direction shown in Figure 7.1.
b. Each individual element may be located in the cylindrical coordinate
system ( )z′′′ ,,ϕρ . Noting that the mainbeam direction coincides with the z′ -direction shown in Figure 7.1 and Figure 7.2 in the previous chapter. The transformation from the rectangular coordinates ( )zyx ,, to the cylindrical coordinates ( )z′′′ ,,ϕρ is introduced in Chapter 7. The phase of each individual element of the subarray generator may be calculated from (8.5).
c. Generate 3-D fractal arrays using the procedure described below.
The 3-D fractal arrays may be generated by an operation, similar to the operation
to generate the 2-D fractal arrays described in Chapter 1. The construction process for a
fractal array begins by starting with an element (initiator) as shown in Figure 8.1.
Figure 8.1 Fractal spherical array initiator (stage 0)

150
Stage 1: Surround the antenna with m concentric spheres of radius rm, and substitute the initiator antenna shown in Figure 8.1 with a generator as shown in Figure 8.2.
Figure 8.2 Fractal spherical array (stage 1)
Stage 2: Expand the size of the array by a factor of δ shown in Figure 8.2 Reiterate the operation performed in stage 1.
Stage P (P > 2): Repeat all further stages similar to the operation performed in stage 2.
By (8.1), the recurrence relation for the array factor can be expressed as:
)()()( 11 ΨΨ=Ψ − AFAFAF PP δ (8.6)
By this recurrence relation, the current amplitude and phase excitation of each individual
generated element are consistent with (8.1), each of which may be expressed as:
11m
Pn
Pn III ′
−′= (8.7)
rm
151
and
11m
Pn
Pn ′
−′ += βδββ (8.8)
where PnI and P
nβ are the current amplitude excitation and phase of the nth element at
stage P generated from the ( )thn′ element at stage P-1 by using the ( )thm′ element of the
subarray generator, respectively, where
( ) mnNn g ′+′= ; Ng is the number of elements of the subarray generator.
1−′
PnI and 1−
′Pnβ are the current amplitude excitation and phase of the
( )thn′ generating element at stage P-1, respectively.
1mI ′ and 1
m′β are the current amplitude excitation and phase of the ( )thm′ element of the subarray generator, respectively.
Consequently, the iterative equation given in (8.8) can be used to derive (7.10) for fractal
arrays that use a spherical subarray generator. This can be interpreted as meaning that the
mainbeam direction of the fractal array is the same as that of the spherical subarray
generator. Also,
we note that the phase βn of the nth element may be computed using the expression:
.'kznn −=β (8.9)
8.2.1 Menger Sponge (3-D Sierpinski Carpet) Array
Menger sponge (also called 3-D Sierpinski carpet) arrays are a special type of
antenna array that occupies 3-D spaces. Their structure is defined to be consistent with

152
the Menger sponge fractal. Menger sponge (3-D Sierpinski carpet) arrays may be
generated using the subarray shown in Figure 8.3. Each individual element is represented
by a cube where the associated element is located at its center. The subarray generator
may be conveniently represented in the form shown in Figure 8.3.
Figure 8.3 Menger sponge subarray generator, where each individual element is represented by a cube Figure 8.4 indicates the location of each individual element denoted by an “x”. The
coordinates for each of these elements are (-dmin, dmin , dmin), (0, dmin, dmin), (dmin, dmin,
dmin), (-dmin,0, dmin), (dmin,0, dmin), (-dmin,- dmin, dmin), (0,- dmin, dmin),( dmin,- dmin, dmin), (-
dmin, dmin,0), (dmin, dmin,0), (-dmin,- dmin,0),( dmin,- dmin,0), (-dmin, dmin,- dmin), (0, dmin,- dmin),
(dmin, dmin,- dmin), (-dmin,0, dmin), (dmin,0,- dmin),(- dmin,- dmin,- dmin), (0,- dmin,- dmin) and
(dmin,- dmin,- dmin).

153
2dmin
2dmin
2dmin
Figure 8.4 Subarray generator of Menger sponge arrays where each individual element is denoted by an “• ”. The minimum spacing between elements is dmin
By choosing δ = 3, the stage 2 Menger sponge (3-D Sierpinski carpet) array is
shown in Figure 8.5, where each individual element is located at the center of a cube.
Figure 8.6 shows the top view of the stage 2 Menger sponge array whereas Figure 8.7
shows the front view of the stage 2 Menger sponge array. Figure 8.8 shows an auxiliary
view of the stage 2 Menger sponge array in the zx ′−′ plane, where the −′z axis is
oriented in the direction of °== 45oθθ and °== 0oϕϕ . The associated array factor
( )ϕθ ,AF may be determined from (8.4). The relative current amplitude excitation In are
uniform (In =1, for all n) but the relative phase βn may be determined by (8.5), such
that 'kznn −=β as shown in Figure 8.8.

154
Figure 8.5 Stage 2 Menger sponge (3-D Sierpinski carpet) array where an individual element is located at the center of each cube
-5 -4 -3 -2 -1 0 1 2 3 4 5-4
-3
-2
-1
0
1
2
3
4
X axis
Y a
xis
Figure 8.6 Top view of the stage 2 Menger sponge array in terms of minimum interelement spacing dmin.

155
-5 -4 -3 -2 -1 0 1 2 3 4 5-4
-3
-2
-1
0
1
2
3
4
X axis
Z ax
is
Figure 8.7 Front view of the stage 2 Menger sponge array, in terms of minimum interelement spacing dmin
-6 -4 -2 0 2 4 6-11
-10
-9
-8
-7
-6
-5
-4
-3
-2
-1
0
X prime axis
Z pr
ime
axis
Figure 8.8 Auxiliary view of the stage 2 Menger sponge array, in terms of interelement spacing dmin. The z′ -axis is oriented to the direction of °= 45θ and °= 0ϕ . The scale is expressed in terms of dmin

156
8.2.1.1 Radiation Characteristics of Menger Sponge Arrays
Figure 8.9 and Figure 8.10 shows plots of the normalized array factor in dB scale
for the stage 2 Menger sponge array with minimum spacing of dmin = λ, where the
mainbeam is steered to the direction of °== 0oθθ and °== 0oϕϕ .
Figure 8.9 Plot of the normalized array factor for the stage 2 Menger sponge array with minimum spacing of dmin = λ where the mainbeam is steered to the direction of
°== 0oθθ and °== 0oϕϕ
ny
nx
dB

157
0 10 20 30 40 50 60 70 80 90-80
-70
-60
-50
-40
-30
-20
-10
0
Theta (degrees)
Nor
mal
ized
Arr
ay F
acto
r (dB
)
Figure 8.10 Plot of the normalized array factor sliced at ϕ = 0º for the stage 2 Menger sponge array with minimum spacing of dmin = λ where the mainbeam is steered to the direction of °== 0oθθ and °== 0oϕϕ
Figure 8.9 shows that, with minimum spacing one wavelength apart, grating lobes are
present in the radiation pattern represented by the visible region (unit circle centered at
the origin (nx,ny) = (0,0)). In particular, the normalized array factor versus θ sliced at ϕ =
0° is illustrated in Figure 8.10 which demonstrates that there is one grating lobe present
in this particular cut (the other grating lobe is not shown in Figure 8.10).
Figure 8.11 and Figure 8.12 show the case where mainbeam is steered to the
direction of °== 45oθθ and °== 0oϕϕ with minimum element spacing of one
wavelength. Figure 8.11 shows that there are large sidelobes present in the radiation

158
pattern represented by the visible region (unit circle centered at the origin, (nx,ny) = (0,0)).
As shown in Figure 8.12, the normalized array factor versus θ sliced at ϕ = 0° indicates a
relatively high sidelobe level compared to the overall radiation pattern.
Figure 8.11 Plot of the normalized array factor for the stage 2 Menger sponge array with minimum spacing of dmin = λ where the mainbeam is steered to the direction of
°== 45oθθ and °== 0oϕϕ . The horizontal and vertical axes are denoted by xn and yn ,
respectively, where 1222 =++ zyx nnn
nx
ny
dB

159
Figure 8.12 Plot of the normalized array factor for the stage 2 Menger sponge array with minimum spacing of dmin = λ where the mainbeam is steered to the direction of
°== 45oθθ and °== 0oϕϕ
8.2.2 3-D Sierpinski Gasket Arrays
3-D Sierpinski gasket arrays are 3-D antenna arrays whose structures are
associated with a 3-D version of the Sierpinski gasket. Their subarray generators contain
4 elements. Each of which is located at a vertex of a tetrahedron. The rectangular
coordinates of the nth element ( )nnn zyx ,, are given by [65]
( )minmin 612/1,0,33/1 dd − , ( )minmin 612/1,2/,36/1 dd −±− , and ( )min64/1,0,0 d .
Figure 8.13 shows the stage 1 3-D Sierpinski gasket which contain 4 tetrahedrons; each
of which represents an individual element of the subarray generator. Each individual
element of the subarray generator is denoted by an “x” in Figure 8.14.
-80 -60 -40 -20 0 20 40 60 80-80
-70
-60
-50
-40
-30
-20
-10
0
Theta (degrees)
Nor
mal
ized
Arr
ay F
acto
r (dB
)

160
Figure 8.13 Stage 1 of the 3-D Sierpinski gasket contains 4 tetrahedrons; each of which represents an individual element located at its center
Figure 8.14 Subarray generator of the Sierpinski gasket array
dmindmin

161
The minimum spacing dmin between elements shown in Figure 8.14 may be
determined from the geometry shown in Figure 8.5 [63]. The resulting expression is
found to be
64
minrd = (8.10)
(a) Bottom View (b) Side View
Figure 8.15 Determining minimum spacing dmin of the subarray generators [63]
By choosing the expansion ratio δ = 2, the stage 3 3-D Sierpinski gasket array
may be represented by the stage 3 Sierpinski gasket in Figure 8.16 where each
tetrahedron represents an array element. In other words, each individual element is
located at the centroid of the associated tetrahedron.
r
r
dmin
r
r
dmin/2

162
Figure 8.16 Stage 3 3-D Sierpinski gasket.
Figure 8.17 represents the top view of the stage 3 3-D Sierpinski gasket array
which contains 64 elements. Each individual element is denoted by an “x”. The
horizontal and vertical axes represent the x- and y- axes, respectively. Figure 8.18 shows
the front view of the stage 3 3-D Serpinski gasket array. Also, each individual element is
denoted by an“x”. The horizontal and vertical axes represent the x- and z- axes,
respectively, whereas Figure 8.19 represents an auxiliary view of the stage 3 3-D
Sierpinski gasket array where the horizontal and vertical axes denote the x′ - and z′ -
axes, respectively. The associated array factor ( )ϕθ ,AF may be determined by (8.4). The
relative current excitation In are uniform (In = 1, for all n) but the relative phase βn may
be determined by (8.5), 'kznn −=β as shown in Figure 8.19.

163
-3 -2 -1 0 1 2 3 4 5
-3
-2
-1
0
1
2
3
X axis
Y a
xis
Figure 8.17 Top view of the stage 3 3-D Sierpinski gasket array, scaled in terms of minimum interelement spacing dmin
-2 -1 0 1 2 3 4
-1
-0.5
0
0.5
1
1.5
2
2.5
3
3.5
4
X axis
Z ax
is
Figure 8.18 Front view of the stage 3 3-D Sierpinski gasket array, scaled in terms of minimum interelement spacing dmin

164
-3 -2 -1 0 1 2 3
-5
-4.5
-4
-3.5
-3
-2.5
-2
-1.5
-1
-0.5
0
X prime axis
Z pr
ime
axis
Figure 8.19 Auxiliary view of the stage 3 3-D Sierpinski gasket array, in terms of minimum interelement spacing dmin. The z′ -axis is oriented in the direction of °= 45θ and °= 0ϕ
8.2.2.1 Results of the Stage 3 3-D Sierpinski Gasket Array
Figure 8.20 and Figure 8.21 show plots of the normalized array factor of the stage
3 3-D Sierpinski gasket array with minimum spacing of dmin = λ where the mainbeam is
steered to the direction of °= 0θ and °= 0ϕ ; Figure 8.20 shows a plot of the normalized
array factor in terms of nx and ny where nz is assumed to be nonnegative, as well as Figure
8.21 shows a plot of array factor sliced at a specific angle ϕ = 0°. Figure 8.20 shows that
there are relatively large sidelobes present in the radiation pattern represented by the unit
circle centered at the origin, (nx,ny) = (0,0).

165
Figure 8.20 Plot of the normalized array factor for the stage 3 3-D Sierpinski gasket array with minimum spacing of dmin = λ/2 where the mainbeam is steered to the direction of °== 0oθθ and °== 0oϕϕ . The horizontal and vertical axes denote xn and yn ,
respectively, where 1222 =++ zyx nnn
nx
ny dB

166
Figure 8.22 and Figure 8.23 show plots of the normalized array factor of the stage 3 3-D
Sierpinski gasket array with minimum spacing of dmin = λ where mainbeam is steered to
the direction of °= 45θ and °= 0ϕ . Figure 8.22 shows a plot of the normalized array
factor in terms of nx and ny where nz is assumed to be nonnegative, as well as Figure 8.23
shows a plot of the normalized array factor versus θ sliced at a specific angle ϕ = 0°.
Figure 8.22 demonstrates that the overall sidelobe level is still high. This is an
undesirable characteristic for broadband applications.
0 10 20 30 40 50 60 70 80 90-80
-70
-60
-50
-40
-30
-20
-10
0
Theta (degrees)
Nor
mal
ized
Arr
ay F
acto
r (dB
)
Figure 8.21 Plot of the normalized array factor sliced at ϕ = 0º for the stage 3 3-D Sierpinski gasket array with minimum spacing of dmin = λ/2 where the mainbeam is steered to the direction of °== 0oθθ and °== 0oϕϕ

167
Figure 8.22 Plot of the normalized array factor of the stage 3 3-D Sierpinski gasket array with minimum spacing of dmin = λ/2 where mainbeam is steered to the direction of
°== 45oθθ and °== 0oϕϕ . The horizontal and vertical axes are denoted by xn and yn ,
respectively, where 1222 =++ zyx nnn
Although the 3-D fractal arrays investigated so far are undesirable to broadband
applications, the half-power beamwidth of the 3-D fractal arrays do not significantly
depend on the steered angle of the mainbeam. This charateristic is different from that of
the 2-D fractal arrays. The 3-D fractal arrays with more complicated structures, e.g., 3-D
Peano-Gosper fractal arrays, could be suitable candidates for broadband directional
arrays.
nx
ny
dB

168
Figure 8.23 Plot of the normalized array factor sliced at ϕ = 0° of the stage 3 3-D Sierpinski gasket array with minimum spacing of dmin = λ where the mainbeam is steered to the direction of °== 45oθθ and °== 0oϕϕ 8.3 Conclusions
While most of the results obtained so far for 3-D arrays are undesirable for
broadband applications, it is observed that the half-power beamwidth of these 3-D fractal
arrays do not significantly depend on the steered angle of the mainbeam. Hence, more
complex-structured 3-D fractal arrays may potentially perform well in antenna
applications requiring high directivity, rapid computations, minimal sidelobe emissions,
and adaptive beamforming.
-80 -60 -40 -20 0 20 40 60 80 -80
-70
-60
-50
-40
-30
-20
-10
0
Theta (degrees)
Nor
mal
ized
Arr
ay F
acto
r (dB
)

169
Chapter 9
Conclusions and Future Work
9.1 Conclusions
The potential benefits of fractal arrays include their multiband/broadband
performance, the ability to exploit the recursive nature of fractals to develop rapid
beamforming algorithms, and the ability to develop schemes for low sidelobe designs.
Moreover, systematic approaches to thinning and efficient design strategies for large 2-D
arrays are possible. Also, it has been shown that they require a minimal amount of
switching when implemented as reconfigurable apertures. The research in this thesis has
led to a new design methodology for modular broadband arrays that is based on the
theory of fractal tilings. This type of fractal array differs fundamentally from other types
of fractal arrays considered in the past that have regular boundaries with elements
distributed in a fractal pattern on the interior. Examples of broadband array
configurations based on fractal tilings developed and studied in this thesis include Peano-
Gosper, Terdragon, and 6-Terdragon arrays.
Several new self-scalable arrays have also been introduced in this thesis,
including pentagonal, octagonal, and honeycomb arrays. These arrays were shown to
possess relatively low-sidelobe characteristics with the added advantage that they can be
generated recursively. This allows for the development of rapid beamforming algorithms
for these arrays. Finally, some preliminarily investigations into the radiation
characteristics of two different 3-D fractal arrays have also been presented. These studies
indicate that the beamwidth of 3-D fractal arrays are less sensitive to the mainbeam scan
direction than their 2-D counterparts.

170
Chapter 1 includes a literature review of fractals and their applications in
electromagnetics. Moreover, Chapter 1 also introduces a family of fractal arrays that are
generated using concentric ring subarrays. Specific examples considered in Chapter 1
include Sierpinski gasket arrays and self-scalable hexagonal arrays. These arrays have
the advantage that they can be recursively generated via a compact product representation
for their array factors.
Chapter 2 further investigates other configurations of fractal arrays that can be
constructed using ring subarray generators. These include self-scalable pentagonal, self-
scalable octagonal, and honeycomb arrays. For both self-scalable pentagonal and self-
scalable octagonal arrays where the minimum element spacing is a half-wavelength, it
was found that the overall sidelobe level can be made lower by inserting an element at the
center of the associated subarray generators. Although, for the case of self-scalable
octagonal arrays, the corresponding beamwidth increases by inserting an element at the
center of the generator, the maximum directivity is seen to increase for minimum element
spacings of both a half wavelength as well as a wavelength.
Chapter 3 reviews briefly the conventional principle of pattern multiplication and
introduces the generalized principle of pattern multiplication. The conventional principle
of pattern multiplication is based on the assumption that the generators for all the
individual elements are the same in their structure, size, and orientation. To eliminate this
assumption, the generalized principle of pattern multiplication is introduced. In this case,
the array factor can be expressed in terms of a summation of all the entries in a particular
matrix representation. This matrix has the property that it can be expressed in terms of the
product of other matrices; each of which represents the array factor for a previously

171
generated subarray. This generalized principle of pattern multiplication is applied in
Chapters 4, 5 and 6 where fractal configurations are formed by generators which are
identical in shape and size but different in orientation.
Chapter 4 introduced the Peano fractal array and the Sierpinski dragon fractal
array. The Peano and Sierpinski dragon fractal arrays do not perform well as broadband
arrays. However, their structures are relatively simple and lead to a better understanding
of the more complicated array configurations introduced later in Chapters 5 and 6.
Chapters 5 and 6 discuss a new class of modular broadband arrays that are based
on applications of tiling theory. These arrays were found to be relatively broadband when
compared to conventional periodic planar arrays that have square or rectangular cells and
regular boundary contours. The analysis presented in Chapter 5 focuses on a specific type
of tiled array called the Peano-Gosper array. Its structure corresponds to the self-avoiding
Peano-Gosper curve. Chapter 6 introduces the terdragon and related 6-terdragon arrays.
Elements of the Peano-Gosper, terdragon and 6-terdragon fractal arrays are distributed
uniformly along a self-avoiding space-filling curve. These arrays are also shown to
belong to the class of deterministic arrays that are almost uniformly excited. For all of
these arrays, it is shown that grating lobes do not appear in their radiation patterns even
when the minimum spacing between elements is increased up to a wavelength. Hence,
these arrays all exhibit broadband operating characteristics. Moreover, both Peano-
Gosper arrays and 6-Terdragon arrays can be partitioned into several identical subarrays;
each of which also represents a broadband array. Hence they can be used for applications
where simultaneous multibeam and multifrequency operation is required.

172
Chapter 7 introduces a convenient coordinate transformation which is used for
beamforming of the 3-D fractal arrays considered in Chapter 8. Chapter 8 presents the
results of a preliminary investigation of the radiation characteristics of 3-D fractal arrays
constructed from concentric sphere generators. Specific configurations considered
include the 3-D Sierpinski carpet (also known as the Menger sponge) and 3-D Sierpinski
gasket arrays. The beamwidth of these 3-D fractal arrays are shown to be less sensitive to
the mainbeam direction than in the case of their 2-D fractal array counterparts.
9.2 Future Work
There are several possible areas that can be explored as future work which build
upon the research presented in this thesis. These include:
• Develop and evaluate the performance of more sophisticated self-scalable array
designs based on concentric ring subarray generators.
• Investigate the radiation characteristics of other array configurations with
irregular boundary contours based on fractal tilings.
• Investigate the relationship between the fractal dimension of the irregular
boundary contour and the corresponding bandwidth of arrays formed via fractal
tilings.
• Develop design approaches for fractal arrays conformal to the surface of curved
objects such as cylindrical and spherical platforms.
• Expand on the preliminary analysis presented in this thesis for generating 3-D
volumetric fractal arrays.

173
• Develop effective beamforming and sidelobe suppression techniques for 3-D
volumetric fractal arrays.

174
References
[1] B. B Mandelbrot, The Fractal Geometry of Nature, New York: W.H. Freeman and
Company, 1977. [2] J. Feder, Fractals, Plenum Press, New York, 1988.
[3] R. L. Haupt, and D. H. Werner, “ Fractal Constructions of Linear and Planar Arrays,” Antennas and Propagation Society International Symposium, Vol. 3, pp. 1968-1971,
1997. [4] C. P. Baliarda, and R. Pous, “Fractal Design of Multi-band and Low Side-Lobe
Arrays,” IEEE Trans. Antennas Propagat., Vol. 44, pp. 730-739, May 1996. [5] D. J. Jaggard, “Prolog Section on Fractals in Electrical Engineering,” Proc. IEEE,
Vol. 81, pp.1423-1427, October 1993. [6] H., -O. Peitgen and D. Saupe, Chaos and Fractals New Frontiers of Science, New
York: Springer-Verlag, 1992. [7] D. H. Werner and P. L. Werner, “Frequency-Independent Features of Self-Similar Fractal Antennas,” Radio Science, Vol. 31, pp.1331-1343, November-December 1996. [8] D. H. Werner and P. L. Werner, “On the Synthesis of Fractal Radiation Patterns,”
adio Science, Vol. 30, pp. 24-45, January – February 1995. [9] D.L Jaggard, On Fractal Electrodynamics, in Recent Advances in Electromagnetic
Theory, H. N. Kritikos and D. L. Jaggard, Eds., New York, Springer- Verlag, 1990. [10] J. L. Vehel, E. Lutton, and C. Tricot, Fractals in Engineering from Theory to
Industrial Applications, Springer Verlag, 1997. [11] M.V. Berry, “Diffractals,” J. Phys. A: Math. Gen., Vol. 12, pp. 781-797, 1979.
[12] M.V. Berry and T.M. Blackwell, “Diffractal Echoes,” J. Phys. A: Math. Gen., Vol.14, pp. 3101-3110, 1981.
[13] E. Jakeman, “Scattering by a Corrugated Random Surface with Fractal Slope,” J.
Phys. A, Vol. 15, L55-L59, 1982. [14] E. Jakeman, “Fresnel Scattering by a Corrugated Random Surface with Fractal
Slope,” J. Opt. Soc. Am., Vol. 72, pp.1034-1041, 1982.

175
[15] E. Jakeman, “ Fraunhofer Scattering by a Sub-Fractal Diffuser,” Optica Acta, Vol. 30, pp. 1207-1212, 1983.
[16] E. Jakeman, “Scattering by Fractals,” in Fractals in Physics, L. Pietronero ans E.
Tosatti, eds., Elsevier Science Publishers B.V. New York, pp.55-60, 1986. [17] C. Allain and M. Cloitre, “Optical Fourier Transforms of Fractals,” in Fractals in
Physics, L. Pietronero and Tosatti, eds, Elsevier Science Publishers B.V., New York, pp.61-64, 1986.
[18] C. Allain and M. Cloitre, “Optical Diffraction on Fractals,” Phys. Rev. B, Vol.33,
3566-3569, 1986. [19] C. Bourrely, P. Chiappetta, and B. Torresani, “Light Scattering by Particles of
Arbitrarily Shape: A Fractal Approach,” J. Opt. Soc. Am. A, Vol. 3, pp. 250-255, 1986.
[20] C. Bourrely and B. Torresani, “Scattering of an Electromagnetic Wave by an
Irregularly Shaped Opject,” Optics Comm., Vol. 58, pp. 365-368, 1986. [21] C. Allain and M. Cloitre, “Spatial Spectrum of a General Family of Self-Similar
Arrays,” Phys. Rev. A, Vol. 36, pp. 5751-5757, 1987. [22] D. L. Jaggard and X. Sun, “Scattering from Bandlimited Fractal Fibers,” IEEE.
Trans. Ant. and Propagat., Vol. 37, pp.1591-1597, 1989.
[23] M.M. Beal and N. George, “Features in the Optical Transforms of Serrated Apertures and Disks,” J. Opt. Soc. Am. A, Vol. 6, pp.1815-1826, 1989.
[24] X. Sun and D. L. Jaggard, “Scattering from Fractally Fluted Cylinders,” J.
Electromagnetic Wave Appl., Vol. 4, pp.599-611, 1990. [25] Y. Kim, H. Grebel, and D. L. Jaggard, “Diffraction by Fractally Serrated Apertures,”
J. Opt. Soc. A, Vol. 8, pp.20-26, 1991. [26] D. L. Jaggard, T. Spielman, and X. Sun, “Diffraction by Cantor Targets,” in
Conference Proceedings of the 1991 AP-S/URSI Meeting, London, Ontario, 1991.
[27] T. Spielman and D. L. Jaggard, “Diffraction by Cantor Targets: Theory and Experiment,” in Conference Proceedings of the 1992 AP-S/URSI Meeting, Chicago, Illinois, 1992.
[28] N. Cohen, “Fractal Antennas: Part 1,” Communications Quarterly, pp.7-22, Summer
1995.

176
[29] N. Cohen, R. G. Hohlfeld, “Fractal Loops and The Small Loop Approximation,” Communications Quarterly, pp. 77-81, Winter 1996.
[30] N. Cohen, “Fractal and Shaped Dipoles,” Communications Quarterly, pp.25-36, Spring 1996.
[31] N. Cohen, “Fractal Antennas: Part 2,” Communications Quarterly, pp.53-66,
Summer 1996. [32] C. Puente, “Fractal Antennas,” Ph.D. Dissertation at the Dept. of Signal Theory and
Communications Letters, Universitat Politecnica de Catalunya (UPC), June 1997. [33] C. Puente, J. Romeu, R. Pous, J. Ramis, and A. Hijazo, “Small but long Koch fractal
monopole,” IEE Electronics Letters, Vol. 34(1), pp.9-10, January 1998. [34] C. Puente, J. Romeu, R. Pous, X. Garcia, and F. Benitez, “Fractal Multiband
Antenna Based on the Sierpinski Gasket,” IEE Electronics Letters, Vol. 32 (1), pp.1-2, January 1996.
[35] C. Puente, J. Romeu, R. Pous, and A. Cardama, “On the Behavior of the Sierpinski Multiband Fractal Antenna,” IEEE Trans. on Antennas and Propagation, Vol.46 (4), pp.517-524, April 1998.
[36] J. Romeu, C. Borja, and S. Blanch “High Directivity Modes in the Koch Island Fractal Patch Antenna,” IEEE Antennas and Propagation Society International Symposium,Vol.3, pp.1696-1699, 2000.
[37] C. Borja, G. Font, S. Blanch, and J. Romeu, “High Directivity Fractal Boundary
Microstrip Antenna,”, Electronics Letters , Vol. 36(9), pp.778-779, April 2000.
[38] C. Puente, J. Romeu, R. Bartolome, and R. Pous, “Perturbation of the Sierpinski Antenna to Allocate the Operating Bands,” IEE Electronics Letters, Vol. 32 (24), pp.2186-2188, November 1996.
[39] C. Puente , J. Claret, F. Sagues, J. Romeu, M. Q. Lopez-Salvans, and R. Pous, “Multiband Properties of a Fractal Tree Antenna Generated by Electrochemical Deposition,” IEE Electronics Letters, Vol. 32 (25), pp.2298-2299, December 1996.
[40] C. Puente, C. Borja, M. Navarro, and J Romeu, “An Iterative Model for Fractal
Antennas: Application to the Sierpinski Gasket Antenna,” IEEE Trans. Antennas Propagat., Vol. 48(5), pp.713-719, May 2000.
[41] Y. Kim and D. L. Jaggard, “The Fractal Random Array,” Proc. IEEE, Vol. 74(9),
pp.1278-1280,1986.

177
[42] A. Lakhtakia, V. K. Varadan, and V. V. Varadan, “Time-harmonic and Time-dependent Radiation by Bifractal Dipole Arrays,” Int. J.Electronics, Vol. 63(6), pp.819-824, 1987.
[43] A. Lakhtakia, N. S. Holter, and V. K. Varadan, “Self-Similarity in Diffraction by a
Self-Similar Fractal Screen,” IEEE Trans. Antennas Propagat., Vol.35(2), pp.236-239, Febuary 1987.
[44] D. H. Werner and P. L. Werner, “Fractal Radiation Pattern Synthesis,” Proceedings
of the URSI National Radio Science Meeting, Boulder, Colorado, pp.66, January 1992.
[45] X. Liang, W. Zhensen, and W. Wenbing, “Synthesis of Fractal Patterns From
Concentric-Ring Arrays,” IEE Electronics Letters, Vol. 32(21), pp.1940-1941, October 1996.
[46] S. El-Khamy, “Simplifying and Size Reduction of Kaiser-Koch Multiband Fractal
Arrays Using Windowing and Quantization Techniques,” pp.B13/1 -B13/9, 17th NRSC, 2000.
[47] W. Kuhirun, “The Analysis of Fractal Arrays using Circular and Concentric Ring
Subarray Generators for Low Sidelobes,” MS Paper at the Pennsylvania State University, December 1997.
[48] D. H. Werner, R. L. Haupt, and P. L. Werner, “Fractal Antenna Engineering: The
Theory and Design of Fractal Antenna Arrays,” IEEE Antenna and Propagation Magazine, Vol. 41(5), October 1999.
[49] D. H. Werner, and R. Mittra, Frontiers in Electromagnetics, IEEE Press, 2000.
[50] Z. Baharav, “Fractal Arrays Based on Iterative Fuctions System (IFS),” IEEE Antennas and Propagation International Symposium , Vol. 4, pp.2686-2689, 1999.
[51] M. T. Ma, Theory and Application of Antenna Array, John Wiley & Sons, 1974.
[52] David W. Lewis, Matrix Theory, World Scientific, 1991
[53] Gerald A. Edgar, Measure, Topology, and Fractal Geometry, Springer-Verlag, 1990
[54] D. J. O’Neill, “Element Placement in Thinned Arrays Using Genetic Algorithms,” OCEANS ’94, Oceans Engineering for Today’s Technology and Tomorrows Preservation, Conference Proceedings, Vol. 2, pp. 301-306, 1994.

178
[55] G. P. Junker, S. S. Kuo, and C. H. Chen, “Genetic Algorithm Optimization of Antenna Arrays with Variable Interelement Spacings,” 1998 IEEE Antennas and Propagation Society International Symposium, AP-S Digest, Vol. 1, pp. 50-53, 1998.
[56] C. A. Meijer, “Simulated Annealing in the Design of Thinned Arrays Having Low
Sidelobe Levels,” COMSIG’98, Proceedings of the 1998 South African Symposium on Communications and Signal Processing, pp. 361-366, 1998.
[57] A. Trucco, and V. Murino, “Stochastic Optimization of Linear Sparse Arrays,”
IEEE Journal of Oceanic Engineering, Vol. 24, No. 3, pp. 291-299, July 1999. [58] R. L. Haupt, “Thinned Arrays Using Genetic Algorithms,” IEEE Trans. Antennas Propagat., Vol. 42, No. 7, pp. 993-999, July 1994. [59] M. G. Bray, D. H. Werner, D. W. Boeringer, and D. W. Machuga, “Thinned
Aperiodic Linear Phased Array Optimization for Reduced Grating Lobes During Scanning with Input Impedance Bounds,” Proceedings of the 2001 IEEE Antennas and Propagation Society International Symposium, Boston, MA, Vol. 3, pp. 688-691, July 2001.
[60] M. G. Bray, D. H. Werner, D. W. Boeringer, and D. W. Machuga, “Matching
Network Design Using Genetic Algorithms for Impedance Constrained Thinned Arrays,” Proceedings of the 2002 IEEE Antennas and Propagation Society International Symposium, San Antonio, TX, Vol. 1, pp. 528-531, June 2002.
[61] M. G. Bray, D. H. Werner, D. W. Boeringer, and D. W. Machuga, “Optimization of
Thinned Aperiodic Linear Phased Arrays Using Genetic Algorithms to Reduce Grating Lobes During Scanning,” IEEE Transactions on Antennas and Propagation, Dec. 2002.
[62] B. B. Mandelbrot, The Fractal Geometry of Nature, New York: W. H. Freeman and
Company, 1977. [63] I. S. Gradshteyn, and I. M. Ryzhik, Table of Integrals, Series, and Products, Fifth
Edition, New York: Academic Press, 1994. [64] http://mathworld.wolfram.com/Tetrahedron.html

179
Appendix
A.1 Directivity of 2-D (Planar) Arrays Containing N In-phase Isotropic Elements
The directivity of a 2-D (planar) array containing N in-phase isotropic elements
where the array factor is in the form ∑=
•=N
nnn nrjkInAF
1
)ˆexp()ˆ( r can be expressed as
( )∑∑∑
∑
=
−
==
=
−
−+
=N
m
m
n mn
mnmn
N
nn
N
nn
rrkrrk
III
ID
2
1
11
2
2
1
sin2 rr
rr (A.1)
Proof:
Assuming that all the elements are isotropic, in phase, and coplanar, the
directivity D of such an antenna array may be determined from the expression:
( )
( )∫ ∫= π
0
2π
0
2
2
max
sin,41
,
θϕθϕθπ
ϕθ
ddAF
AFD (A.2)
Consider an N-element antenna array whose array factor may be expressed as:
∑=
•=N
nnn nrjkInAF
1
)ˆexp()ˆ( r (A.3)

180
or
∑=
−=N
nnnn jkrIAF
1
))cos(sinexp(),( ϕϕθϕθ (A.4)
where In, nrr and ϕn are the current amplitude excitation, position vector of magnitude rn,
and the azimuthal angle, respectively, associated with the nth element and n is the unit
vector in the direction of the far-field point.
We obtain an expression for the directivity D, by substituting (A.3) into (A.2)
which yields
( )( )
( )( )∑∑ ∫ ∫∑
∑
∑∑ ∫ ∫∑
∑
=
−
==
=
=
−
==
=
−+
=
−+
=
N
m
m
nmn
mnN
nn
N
nn
N
m
m
nmn
mnN
nn
N
nn
ddnrrkIII
I
ddnrrjkIII
ID
2
1
1 0
2
01
2
2
1
2
1
1 0
2
01
2
2
1
ˆcossin2
sinˆexp4
Re2
.
.
θϕθπ
θϕθπ
π π
π π
rr
rr
(A.5)
Suppose we define the integral appearing in the denominator of (A.5) as
( )( )
( )( ) θϕφϕθθ
θϕθ
π π
π π
ddrrk
ddnrrkT
mnnm
mnmn
∫ ∫
∫ ∫
−−=
•−=
0
2
0
0
2
0
cossincossin
ˆcossin
rr
rr
(A.6)
where φmn is an angle associated with the mth and nth elements.
By setting mnφϕϕ −=′ and θsinnm rrkx rr−= in (A.6) and using [65],

181
,)sincos(21x)(
2
00 θθ
π
π
dxJ ∫= (A.7)
the integral term reduces to
( ) .sinsin20
0∫ −=π
θθθπ drrkJT nmmnrr (A.8)
Finally, by introducing the transformation ,2πθθ −=′ and using,
θθθ dxJ cos)cos(x
sinx 2π
00∫= (A.9)
the term Tmn may be rewritten as:
( ) ( )∫∫ ′′′−=′′′−=−
2
00
2
2
0 coscos4coscos2
ππ
π
θθθπθθθπ drrkJdrrkJT mnnmmnrrrr .
(A.10)
Hence,
( )( )mn
mnmn rrk
rrkT rr
rr
−
−=
sin4π (A.11)
and the directivity D can be expressed as:

182
( )( )∑∑∑
∑
=
−
==
=
−
−+
=N
m
m
n mn
mnmn
N
nn
N
nn
rrkrrk
III
ID
2
1
11
2
2
1
sin2 rr
rr (A.12)
A.2 Directivity of 3-D Antenna Arrays Containing N Isotropic Elements
The directivity of a 3-D (volumetric) array containing N isotropic elements where
the array factor is in the form of ∑=
+•=N
nnnn nrjkInAF
1
)ˆexp()ˆ( βr can be determined
from
( ) ( )∑∑∑
∑
=
−
==
=
−
+−−+−+−+
=N
m
m
n mn
mnmnmnmnmn
N
nn
N
nn
rrkrrkrrk
III
ID
2
1
11
2
2
1
sinsinrr
rrrr ββββ
(A.13)
Suppose we assume that all the elements are isotropic, each of which is located in
a three dimensional space. The directivity D of the antenna array can then be determined
from (A.2):
( )
( )∫ ∫= π
0
2π
0
2
2
max
sin,41
,
θϕθϕθπ
ϕθ
ddAF
AFD (A.14)

183
Consider an N-element antenna array whose array factor may be expressed as:
∑=
+•=N
nnnn nrjkInAF
1
)ˆexp()ˆ( βr (A.15)
or
,))cos(sinexp(),(1∑=
+−=N
nnnnn jkrIAF βϕϕθϕθ (A.16)
where In, nrr and ϕn are the current amplitude excitation, position vector of magnitude rn,
and the horizontal angle, respectively, associated with the nth element and n is the unit
vector in the direction of the far-field point.
We obtain an expression for the directivity D, by substituting (A.15) into (A.14)
which yields
( )( )
( )( )∑∑ ∫ ∫∑
∑
∑∑ ∫ ∫∑
∑
=
−
==
=
=
−
==
=
−+•−+
=
−+•−+
=
N
m
m
nmnmn
mnN
nn
N
nn
N
m
m
nmnmn
mnN
nn
N
nn
ddnrrkII
I
I
ddnrrjkII
I
ID
2
1
1 0
2
01
2
2
1
2
1
1 0
2
01
2
2
1
ˆcossin2
sinˆexp4
Re2
θϕββθπ
θϕθββπ
π π
π π
rr
rr
(A.17)

184
Considering the integral in the denominator of (A.17)
( )( ) θϕββθπ π
ddnrrkT mnmnmn ∫ ∫
−+•−=
0
2
0
ˆcossin rr
At this point it is convenient to introduce a new spherical coordinate system )~,~,~( θϕr as
shown in Figure A.1.
Figure A.1 Figure to determine the term Tmn in the new spherical coordinate system )~,~,~( θϕr
The nth element
The mth element
mn rr rr−
z ′′
x ′′
y ′′
nθ ′′
ϕ ′′
)~,~,~( θϕr

185
The term Tmn can thus be expressed in terms of the new coordinates as follows:
( )
( )( )[ ] θββθθπ
θϕββθθ
π
π π
′′−+′′−′′=
′′
′′−+′′−′′=
∫
∫ ∫
drrk
ddrrkT
mnmn
mnmnmn
0
0
2
0
coscossin2
coscossin
rr
rr
Introducing the variable θ ′′= cosu , Tmn can be expressed as:
( )( )
( )( )
( ) ( )mn
mnmnmnmn
mnmn
mnmnmn
rrkrrkrrk
duurrk
duurrkT
rr
rrrr
rr
rr
−
+−−+−+−=
−+−=
−+−−=
∫
∫
−
−
ββββπ
ββπ
ββπ
sinsin2
cos2
cos2
1
1
1
1
Hence,
( ) ( )∑∑∑
∑
=
−
==
=
−+−−+−+−
+
=N
m
m
n mn
mnmnmnmnmn
N
nn
N
nn
rrkrrkrrk
III
ID
2
1
11
2
2
1
sinsinrr
rrrr ββββ (A.18)
A.3 Array Factor of 2-D (Planar) Arrays Expressed in terms of Ψ
ror n
By setting nβ = 0, the array factor of an N-element antena array contained in the
x-y plane may be written as:

186
( )( )
( )( ) ),(exp)ˆexp()ˆ(
)Ψ,Ψ(ΨΨexp)Ψexp()Ψ(),(
11
11
yx
N
nnynxn
N
nnn
yx
N
nnynxn
N
nnn
nnAFynxnjkInrjkInAF
AFyxjIrjIAFAF
=+=•==
=+=•==
∑∑
∑∑
==
==
r
rrrϕθ
where Ψr
is a vector whose component along the x- and y-axes are xΨ and yΨ ,
respectively, and n is a unit vector whose components along the x-and y-axes are nx and
ny, respectively. The function
( ) ( ) ( ) ( )∑∑==
•=•==ΨN
nnn
N
nnn nrjkIrjInAFAF
11
ˆexpΨexpˆ rrrr
has the following properties:
1. The visible region is 1ˆ =≤+ nnn yxrr or kyx =Ψ≤Ψ+Ψ
rrr
2. The visible region of the function
( ) ( ) ( )( ) ( )( )∑∑==
−•=−•=−=−N
nonn
N
nnno nnrjkIrjInnAFAF
11oo ˆˆexpΨΨexpˆˆΨΨ rrrrrr
is ( ) ( ) 1ˆˆ =−≤−+− oyoyxox nnnnnn rrrr or k=−≤−+− oyoyxox ΨΨΨΨΨΨrrrrrr
3. ( ) ( )ΨΨrr
−= AFAF and ( ) ( )nAFnAF ˆˆ −=
4. ( ) ( )nAFnaAF ˆˆ 21 = where a is a scalar quantity and ( )nAF ˆ1 and ( )nAF ˆ2 are the
array factors in terms of n with the minimum spacings dmin = d1 and d2 = ad1,
respectively.

187
Proof
1. Property 1 is a direct consequence of the fact that
( ) ( ) ( )kjinnnn zyxˆcosˆsinsinˆcossinˆ θϕθϕθ ++=++= vvv
and, the vector znr is always perpendicular to the planar array. Hence,
( )( )
( )( )),(
exp)ˆexp()ˆ(
)Ψ,Ψ(ΨΨexp
)Ψexp()Ψ(),(
11
1
1
yx
N
nnynxn
N
nnn
yx
N
nnynxn
N
nnn
nnAF
ynxnjkInrjkInAF
AFyxjI
rjIAFAF
=
+=•==
=+=
•==
∑∑
∑
∑
==
=
=
r
rrrϕθ
2. Property 2 can be derived by replacing nandΨr
by
ly.respective,ˆˆandΨΨ o onn −−rr
3. Properties 3 and 4 follow directly from the definitions.
A.4 Array Factor of 3-D (Volumetric) Arrays Expressed in Terms of Ψr
or n
By setting nβ = 0, the array factor of an N-element antena array in 3-D space is given
by

188
( )( )
( )( ) ),,(exp
)ˆexp()(
)Ψ,Ψ,Ψ(ΨΨΨexp
)Ψexp()Ψ(),(
1
1
1
1
zyx
N
nnznynxn
N
nnn
zyx
N
nnznynxn
N
nnn
nnnAFznynxnjkI
nrjkInAF
AFzyxjI
rjIAFAF
=++=
•==
=++=
•==
∑
∑
∑
∑
=
=
=
=
rr
rrrϕθ
where Ψr
is a vector whose component in the x-, y- and z-axes are ,Ψ,Ψ yx and zΨ
respectively, and nr is a unit vector whose components along the x-and y-axes are nx and
ny, respectively. The function
( ) ( ) ( ) ( )∑∑==
•=•==N
nnn
N
nnn nrjkIrjInAFAF
11
ˆexpΨexpˆΨ rrrr
has the following properties:
1. The visible region is 1ˆ =≤++ nnnn zyxrrr or kzyx =≤++ ΨΨΨΨ
rrrr
2. The visible region of the function
( ) ( ) ( )( ) ( )( )∑∑==
−•=Ψ−•=−=−N
nnn
N
nonn nnrjkIrjInnAFAF
1o
1oo ˆˆexpΨexpˆˆΨΨ rrrrrr
is ( ) ( ) ( ) 1ˆˆ oooo =−≤−+−+− nnnnnnnn zzyyxxrrrrrr or
.ΨΨΨΨΨΨΨΨ oooo kzzyyxx =−≤−+−+−rrrrrrrr
3. ( ) ( )ΨΨrr
−= AFAF and ( ) ( )nAFnAF ˆˆ −=
4. ( ) ( )nAFnaAF ˆˆ 21 =

189
where ( )nAF ˆ1 and ( )nAF ˆ2 are the array factors in terms of n with the minimum
spacings dmin = d1 and d2 = ad1, respectively.
Proof: These properties may be shown by generalizing the proof for the 2-D case.

Vita The author was born on June 5, 1972, in Bangkok, Thailand. Mr. Kuhirun
attended Chulalongkorn University in and received a B.Eng in 1994. Mr. Kuhirun has a
position as an instructor in Electrical Engineering at Kasetsart University. Subsequently,
Mr. Kuhirun received a scholarship from the Thai Government to study in the United
States while his position as an instructor was held. He received an MSEE in 1998. After
graduation, Mr. Kuhirun pursued his PhD in Electrical Engineering and expects to
graduate in summer 2003.


















