A Multi-Agent System Transient Stability Platform for...
5
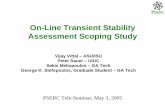
A Multi-Agent System Transient Stability Platform for Resilient Self-Healing Operation of Multiple Microgrids Sergio Rivera Mechatronics Research Laboratory Department of Mechanical Engineering Massachusetts Institute of Technology Cambridge, Massachusetts, USA Email: [email protected] Amro M. Farid Engineering Systems and Management Department Masdar Institute of Science and Technology Abu Dhabi, United Arab Emirates Email: [email protected] Kamal Youcef-Toumi Mechatronics Research Laboratory Department of Mechanical Engineering Massachusetts Institute of Technology Cambridge, Massachusetts, USA Email: [email protected] Abstract—This paper proposes a multi-agent transient stability platform for the study of self-operation of multiple microgrids. This platform combines a MATLAB-based time domain simula- tion of the grid’s transient stability with a JAVA-JADE (JAVA Agent DEvelopment Framework) which supports the develop- ment of multi-agent systems that utilize distributed artificial in- telligence techniques that support simultaneous, geographically- distributed, and coordinated decision-making techniques. This hybrid platform leverages the numerical strengths of MATLAB with JAVA’s multi-threaded decision-making capability. To that effect, the platform was tested on two complementary test cases: one to demonstrate a dynamic reconfiguration capability and another to demonstrate the decentralized dispatch of multiple microgrids. The work presents many opportunities for future developments in the domain of resilient self-healing operation of power grids. Index Terms—Jade, microgrids, multi-agent systems, power system control, transient stability. I. I NTRODUCTION Recently, the academic and industrial literature has coa- lesced around an enhanced power grid vision of the electric power grid that is intelligent, responsive, dynamic, adaptive and flexible [1]–[3]. For example, Figure 1 shows an in- terconnected power-grid that has been logically divided into three micro-grids which may coordinate their power flows but also mutually disconect and operate autonomously. The “smart grid” vision has come to include a resilient, self-healing property that allows for healthy regions of the grid to continue to operate while perturbed regions bring themselves back to normal operation [4]. Such behavior has motivated the need for microgrids as semi-autonomous power grid units that can autonomously respond to grid events while coordinating their power transmission with other power grid entities. Naturally, this desired resilient self-healing behavior based upon semi- autonomous microgrids implies decentralized coordination and control schemes that correspond to each microgrid region. The development of such schemes requires modeling and a software platform. Advanced modeling of the power grid dynamic behavior shows its response to different types of Figure 1: Semiautonomous microgrids disturbances. The software platform enables the verification and validation of simultaneous, geographically-distributed, and coordinated decision-making techniques. The first has often been addressed in power system transient stability studies [5], [6] that are carried out using over-the-shelf power system software or by more formal methods from control theory [7], [8]. The second is an area of growing interest to which the multi-agent system (MAS) community has recently proposed techniques from distributed artificial intelligence (DAI) [4], [9]. To our knowledge, these two approaches have never been combined. Consequently, there exist scenarios in which the holistic behavior of a multiple-microgrid system is not fully understood [3]. For example, transient stability studies of individual microgrids may demonstrate stable behavior which may not necessarily be the case given unknown control in an adjacent microgrid [10], [11]. The recently developed multi- agent power system developments focus exclusively on the multi-agent control system algorithms rather than their impacts on the power grid behavior itself [12]. The most advanced
-
Upload
trinhtuyen -
Category
Documents
-
view
217 -
download
0
Transcript of A Multi-Agent System Transient Stability Platform for...
A Multi-Agent System Transient Stability Platformfor Resilient Self-Healing Operation
of Multiple MicrogridsSergio Rivera
Mechatronics Research LaboratoryDepartment of Mechanical EngineeringMassachusetts Institute of Technology
Cambridge, Massachusetts, USAEmail: [email protected]
Amro M. FaridEngineering Systems andManagement Department
Masdar Institute of Science and TechnologyAbu Dhabi, United Arab Emirates
Email: [email protected]
Kamal Youcef-ToumiMechatronics Research Laboratory
Department of Mechanical EngineeringMassachusetts Institute of Technology
Cambridge, Massachusetts, USAEmail: [email protected]
Abstract—This paper proposes a multi-agent transient stability
platform for the study of self-operation of multiple microgrids.
This platform combines a MATLAB-based time domain simula-
tion of the grid’s transient stability with a JAVA-JADE (JAVA
Agent DEvelopment Framework) which supports the develop-
ment of multi-agent systems that utilize distributed artificial in-
telligence techniques that support simultaneous, geographically-
distributed, and coordinated decision-making techniques. This
hybrid platform leverages the numerical strengths of MATLAB
with JAVA’s multi-threaded decision-making capability. To that
effect, the platform was tested on two complementary test cases:
one to demonstrate a dynamic reconfiguration capability and
another to demonstrate the decentralized dispatch of multiple
microgrids. The work presents many opportunities for future
developments in the domain of resilient self-healing operation of
power grids.
Index Terms—Jade, microgrids, multi-agent systems, power
system control, transient stability.
I. INTRODUCTION
Recently, the academic and industrial literature has coa-lesced around an enhanced power grid vision of the electricpower grid that is intelligent, responsive, dynamic, adaptiveand flexible [1]–[3]. For example, Figure 1 shows an in-terconnected power-grid that has been logically divided intothree micro-grids which may coordinate their power flowsbut also mutually disconect and operate autonomously. The“smart grid” vision has come to include a resilient, self-healingproperty that allows for healthy regions of the grid to continueto operate while perturbed regions bring themselves back tonormal operation [4]. Such behavior has motivated the needfor microgrids as semi-autonomous power grid units that canautonomously respond to grid events while coordinating theirpower transmission with other power grid entities. Naturally,this desired resilient self-healing behavior based upon semi-autonomous microgrids implies decentralized coordination andcontrol schemes that correspond to each microgrid region.
The development of such schemes requires modeling anda software platform. Advanced modeling of the power griddynamic behavior shows its response to different types of
Figure 1: Semiautonomous microgrids
disturbances. The software platform enables the verificationand validation of simultaneous, geographically-distributed, andcoordinated decision-making techniques. The first has oftenbeen addressed in power system transient stability studies [5],[6] that are carried out using over-the-shelf power systemsoftware or by more formal methods from control theory [7],[8]. The second is an area of growing interest to which themulti-agent system (MAS) community has recently proposedtechniques from distributed artificial intelligence (DAI) [4],[9].
To our knowledge, these two approaches have never beencombined. Consequently, there exist scenarios in which theholistic behavior of a multiple-microgrid system is not fullyunderstood [3]. For example, transient stability studies ofindividual microgrids may demonstrate stable behavior whichmay not necessarily be the case given unknown control in anadjacent microgrid [10], [11]. The recently developed multi-agent power system developments focus exclusively on themulti-agent control system algorithms rather than their impactson the power grid behavior itself [12]. The most advanced
S. Rivera, A. M. Farid, and K. Youcef-Toumi, “A Multi-Agent System Transient Stability Platform for Resilient Self-Healing Operation of Multiple Microgrids,” in 5th IEEE PES Innovative Smart Grid Technologies Conference, (Washington D.C.), pp. 1–5, 2014.

work has included power flow analysis physical models thatdescribe the grids pseudo-steady state behavior. Such analysisdoes not well address the effects of dynamic reconfigurationsor uncoordinated dispatching decisions and can lead to systeminstabilities [13].
This paper specifically seeks to address these needs by de-veloping a multi-agent transient stability platform for the studyof self-healing operation of multiple microgrids. It proceedsas follows. Section II further discusses the implications of thegaps in the current literature on multi-agent microgrid systems.Section III then contributes the proposed multi-agent transientstability platform. Section IV then provides two case studyexamples: a dynamic reconfiguration, and an uncoordinateddecentralized dispatch. The paper is brought to a close inSection V.
II. BACKGROUND: THE COORDINATION AND CONTROL OFMICROGRIDS
The coordination and control of microgrids is a subjectthat has received much attention in the literature [14], [15].This section highlights some of the currents gaps in regardsto coordination schemes for multi-agent microgrid systems.
A. Microgrid Modeling
Microgrids’ essential characteristic lays in their semi-autonomous behavior. Each must behave as a single controlledentity that reliably controls its constituent loads and micro-sources. In the meantime, it must coordinate its net powerflow to the surrounding power system(s). Together, this semi-autonomous behavior requires that [16], [17]:
• New microsources be added to the system without mod-ification of existing equipment.
• The microgrid connect and disconnect itself from the gridrapidly and seamlessly.
• The reactive and active power be independently con-trolled.
• The microgrid meets the grids dynamic load require-ments.
To that effect, a microgrid model must first consider thedifferent types of constituent physical elements. These include:
1) Dispatchable Generation2) Variable Generation3) Dispatchable Load4) Variable Load5) Energy Storage Systems6) Power System Buses7) Power System LinesWhile a full discussion on the modeling of these physi-
cal elements is not feasible in this paper, it is essential toparametrize each of these elements in terms of their power flowand energy capacities, ramping capabilities, energy sources,control points, their dynamic properties and their relativeincidence to each other in the network. The interested reader isreferred to introductory texts on power system operation andcontrol for further details [18].
The semi-autonomous microgrid behavior can be achievedthrough a hierarchical control structure with three layers.These include a primary and a secondary control, and a tertiarydispatch [8], [19]. The first two are often associated with thepower system’s transient stability while the latter is associatedwith inter-microgrid coordination.
B. Primary & Secondary Control for Transient Stability
The primary and secondary control layers is largely respon-sible for the real-time transient stability of the power grid. Ithas received comparatively speaking greater attention in theliterature. Primary control operates on a real-time feedbackcontrol principle on the basis of local measurements [19].Secondary control compensates for voltage and frequencydeviations that may exist in spite of the primary control. Itadjusts setpoints dynamically to achieve minimum and stabledeviations while the power system transitions to new operatingpoints [8]. This functionality is particularly important afterlarge disturbances such as generator or load faults. As in largerpower systems, microgrid stability issues may be classified assmall signal, transient and voltage stability [5]:
• Small signal stability in a microgrid is related to feed-back controller, small load change and power limit of themicro-sources.
• Transient stability problem in a microgrid is related witha fault, loss of a micro-source, islanding and large loadchange.
• Reactive power limits, load dynamics and tap changerscreate most of the voltage stability problems in a micro-grid.
Many approaches to microgrid transient stability controlsuch as turbine governors and automatic voltage regulatorshave been borrowed from traditional power systems [5],[20]. Microgrids, however, pose greater challenges as eachgenerator or load makes up a comparatively large portionof the power flow. As a result, any individual disturbancecan have a significantly larger impact on the power systemstability. Similarly, further transient stability is required toaddress disturbances originating within a microgrid that impactneighboring microgrids under potentially different operationaljurisdiction.
C. Secondary and Tertiary Coordination by Multi-Agent Sys-tems
Tertiary coordination refers to the power systems dispatch inorder to restore secondary control reserve, manage line conges-tion, and bring frequency and voltage deviations back to theirtargets [19]. Traditionally, tertiary coordination is posed as acentralized optimization program such as economic dispatchor unit commitment which is executed by an independentsystem operator or power utility which has a jurisdictionalmonopoly over the region’s many generation facilities. Theirdirect application to microgrids is limited for two reasons,however. First, each individual microgrid may have only afew microsources to be dispatched; so reliability demandsoften overshadow economic optimization. Second, a multiple
microgrid system may not necessarily have a centralizedorganization that can centrally optimize on their behalf.
In contrast, multi-agent system technology promise to ad-dress a number of specific multi-microgrid operational chal-lenges [21]. These include:
• The micro-sources either within a microgrid or acrossmicrogrids may have different owners. Decentralizedcoordination facilitates each owner’s unique managementinterest
• Each microgrid may operate in a liberalized market andhence should maintain a certain level of “intelligence” asit bids and participates.
• Each microgrid can operate autonomously in the absenceof communication systems or cooperatively using po-tentially any of a number of available communicationtechnologies.
• Each microgrid can dynamically and flexibly adapt to theactivities occurring in neighboring microgrids and powersystems.
Multi-agent systems achieve these needs for simultaneous,geographically distributed and coordinated decision-makingwith the control design of each agent. They exhibit thefollowing characteristics [12], [21]:
• The (virtual software) agent must represent a physicalentity so as to control its interactions with the rest of theenvironment.
• The agent must sense changes in the environment andtake action accordingly.
• The agent must communicate with other agents in thepower system with minimal data exchange and computa-tional demands.
• The agent must exhibit a certain level of autonomy overthe actions that it takes.
• The agent has minimally partial representation of theenvironment.
III. A MULTI-AGENT SYSTEM TRANSIENT STABILITYPLATFORM
The coordination and control of microgrids as semi-autonomous power units suggests a decentralized control struc-ture which may be rigorously validated and verified while stillrespecting the socio-economic context in which it operates. Tothis effect, a multi-agent system transient stability platform isproposed. This platform uses a hybrid computational platformbased upon JAVA Agent DEvelopment Framework (JAVA-JADE) and MATLAB.
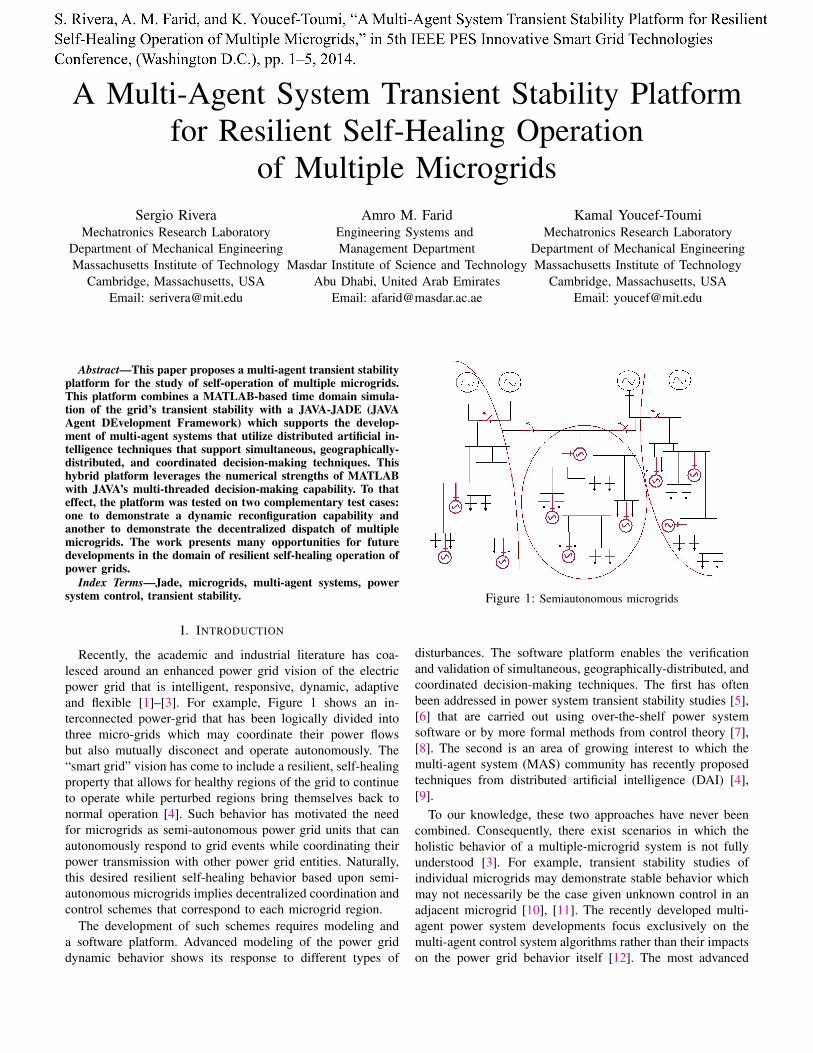
Following the microgrid modeling discussion found in Sec-tion II-A, the platform consists of a physical agent that isassigned to each type of physical entity found in a powergrid. Figure 2 shows a unified modeling language (UML) classdiagram of these seven types of agents and their compositionin a microgrid. Each agent can be implemented with increas-ingly complex decision-making functionality which may beentirely decentralized & autonomous. Alternatively, each agentmay interact and negotiate with other agents to achieve a
coordinated and semi-autonomous behavior. In such a way,each microgrid has a control-action behavior that is able torespond to disturbances in the power system. Here, the JAVA-JADE platform respects that each microgrid and potentiallyeach microsource can be managed by entirely different orga-nizations. Furthermore, the computational platform is multi-threaded allowing simultaneous decision-making capabilitiesthat occur in geographically distributed locations.
Despite these multiple advantages which are applicableto the multi-microgrid tertiary coordination, the JAVA-JADEenvironment has not been traditionally applied to physical sys-tems where the differential algebraic equations of motion resultin complex time domain simulations. Furthermore, JAVA, as ahigh-level programming language, is a relatively poor choicefor computational applications with sophisticated numericalmethods.
As shown in Figure 2, this barrier is overcome with thechoice of MATLAB as a computationally appropriate envi-ronment for the time domain simulation of the power gridtransient stability and primary control. This choice brings anumber of notable advantages:
• Fast Development: MATLAB comes prepackaged withnumerical methods functionality including differentialalgebraic equation solvers and well-established toolboxesin control systems, optmization, and statistics.
• Fast Computation Time: Although MATLAB is an inter-preted language, many of these prepackaged numericalmethods have been previously compiled from C code.
• Flexible Development: The MATLAB language is inter-preted and maintains a flexible syntax which is generallyaccepted to facilitate engineering application develop-ment over traditional programming environments.
It is worth noting that these advantages serve only thesimulation of the physical grid and its primary and control.MATLAB is primarily a single-threaded programming lan-guage. Therefore, it can not execute two or more programs inparallel. Nor can it support peer-to-peer message transfer. Asa result, it is incapable of achieving the previously mentionedmulti-agent system functionality provided by the JAVA-JADEenviroment.
Therefore, this hybrid multi-agent system transient stabilityplatform leverages the strengths of each computational envi-ronment and avoids their respective weaknesses. The interfac-ing of these two environments is achieved by an open-sourceJAVA application called “Matlabcontrol” which allows for call-ing MATLAB from JAVA while still supporting multi-threadedsimulation [22]. As shown in Figure 2, “Matlabcontrol” acts asa communication middleware allowing the MAS to send andreceive data to and from the multiple microgrids representedin MATLAB. In order to facilitate the coordination of thisinformation, a single facilitator agent is implemented to routeinformation to the appropriate computational entity.
In summary, the hybrid platform works along the folllowingoperating principle: 1.) The MAS makes decentralized butcoordinated decisions. 2.) These are sent as reconfigurationsand setpoint actions to the MATLAB power grid simulation
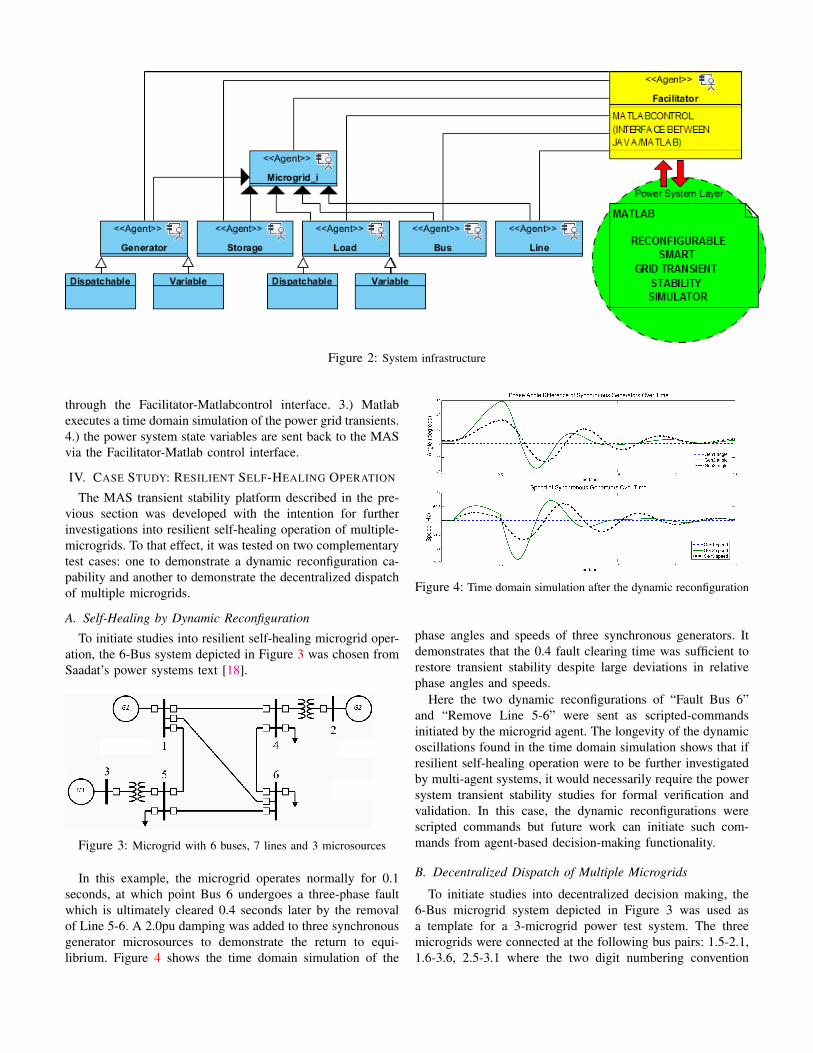
Figure 2: System infrastructure
through the Facilitator-Matlabcontrol interface. 3.) Matlabexecutes a time domain simulation of the power grid transients.4.) the power system state variables are sent back to the MASvia the Facilitator-Matlab control interface.
IV. CASE STUDY: RESILIENT SELF-HEALING OPERATION
The MAS transient stability platform described in the pre-vious section was developed with the intention for furtherinvestigations into resilient self-healing operation of multiple-microgrids. To that effect, it was tested on two complementarytest cases: one to demonstrate a dynamic reconfiguration ca-pability and another to demonstrate the decentralized dispatchof multiple microgrids.
A. Self-Healing by Dynamic Reconfiguration
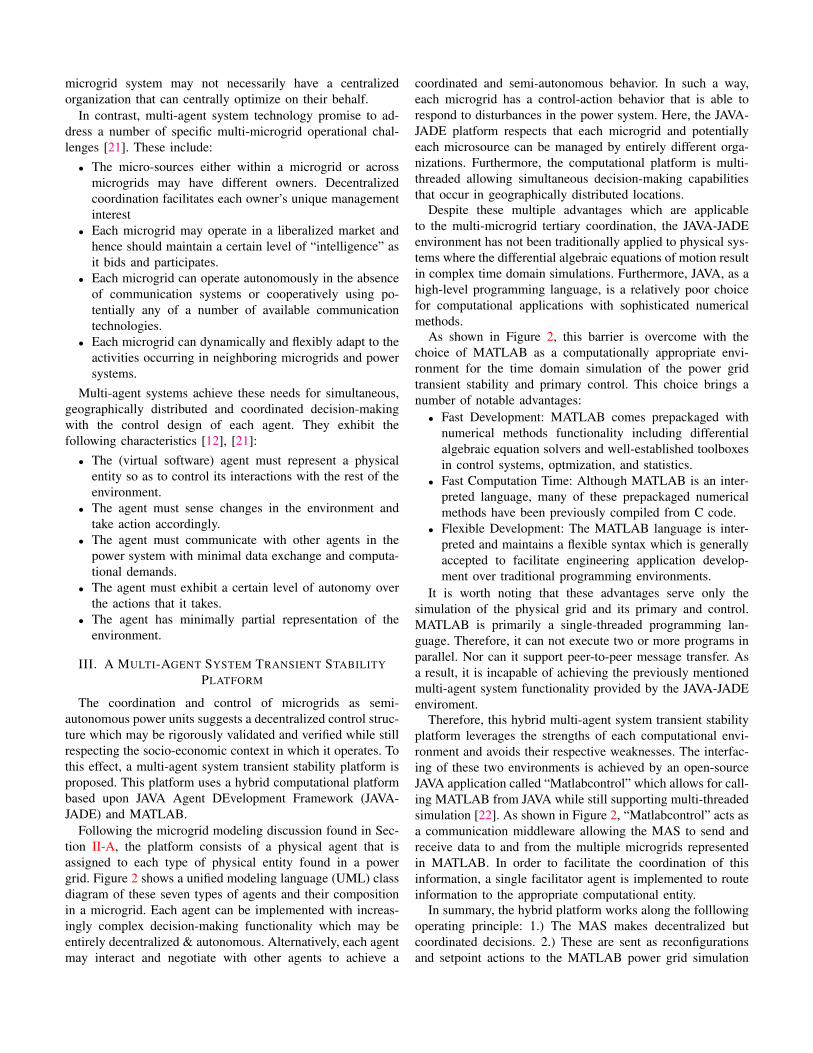
To initiate studies into resilient self-healing microgrid oper-ation, the 6-Bus system depicted in Figure 3 was chosen fromSaadat’s power systems text [18].
Figure 3: Microgrid with 6 buses, 7 lines and 3 microsources
In this example, the microgrid operates normally for 0.1seconds, at which point Bus 6 undergoes a three-phase faultwhich is ultimately cleared 0.4 seconds later by the removalof Line 5-6. A 2.0pu damping was added to three synchronousgenerator microsources to demonstrate the return to equi-librium. Figure 4 shows the time domain simulation of the
Figure 4: Time domain simulation after the dynamic reconfiguration
phase angles and speeds of three synchronous generators. Itdemonstrates that the 0.4 fault clearing time was sufficient torestore transient stability despite large deviations in relativephase angles and speeds.
Here the two dynamic reconfigurations of “Fault Bus 6”and “Remove Line 5-6” were sent as scripted-commandsinitiated by the microgrid agent. The longevity of the dynamicoscillations found in the time domain simulation shows that ifresilient self-healing operation were to be further investigatedby multi-agent systems, it would necessarily require the powersystem transient stability studies for formal verification andvalidation. In this case, the dynamic reconfigurations werescripted commands but future work can initiate such com-mands from agent-based decision-making functionality.
B. Decentralized Dispatch of Multiple Microgrids
To initiate studies into decentralized decision making, the6-Bus microgrid system depicted in Figure 3 was used asa template for a 3-microgrid power test system. The threemicrogrids were connected at the following bus pairs: 1.5-2.1,1.6-3.6, 2.5-3.1 where the two digit numbering convention

Figure 5: Time domain simulation with the decentralized dispatch
denotes the microgrid number followed by the original busnumber. In this example, each microgrid JADE agent initiatedits own economic dispatch independently in response to 10%,5% and 15% increases in demand in microgrids 1, 2 and 3at T=5sec, T=10sec, and T=15sec respectively. The results ofeach microgrid dispatch were sent to the MATLAB environ-ment for a time domain simulation of the full power system.As Figure 5 shows, each new microgrid dispatch setpointsripple through the 3-microgrid system as a whole causing theneed for one microgrid to be able to respond to grid conditionsoutside of its authority.
This 3-microgrid test case demonstrates that each microgridcan be independently dispatched via a local and decentralizedcontrol algorithm. Future work can build upon these purelyautonomous decision with inter-microgrid negotiations thatrely on message passing. In either case, the time domainsimulations motivate the need for each microgrid’s ability torespond to disturbances originating from outside of its controlarea.
V. CONCLUSION
This paper has proposed a multi-agent transient stabilityplatform for the study of self-healing operation of multiplemicrogrids. This platform allows the time domain simulationof the grid’s transient stability while allowing the develop-ment of distributed artificial intelligence techniques that sup-port simultaneous, geographically-distributed and coordinateddecision-making techniques. To that effect, the platform wastested on two complementary test cases: one to demonstrate adynamic reconfiguration capability and another to demonstratethe decentralized dispatch of multiple microgrids.
ACKNOWLEDGMENT
This research is supported by the MIT-Masdar Collabora-tion.
REFERENCES
[1] J. Kassakian, R. Schmalensee, G. Desgroseilliers, T. Heidel, K. Afridi,A. Farid, J. Grochow, W. Hogan, H. Jacoby, J. Kirtley, H. Michaels,I. Perez-Arriaga, D. Perreault, N. Rose, G. Wilson, N. Abudaldah,M. Chen, P. Donohoo, S. Gunter, P. Kwok, V. Sakhrani, J. Wang,A. Whitaker, X. Yap, R. Zhang, and Massachusetts Institute of Technol-ogy. The Future of the Electric Grid: An Interdisciplinary MIT Study.MIT Press, Cambridge, MA, 2011.
[2] M. Amin, A. Anaswamy, G. Arnold, D. Callaway, M. Caramanis,A. Chakraborty, J. Chow, M. Dahleh, C. DeMarco, A. M. Farid,A. Garcia, D. Gayme, M. Grier-i Fisa, I. Hiskens, P. Houpt, G. Hug,P. Khargonekar, M. D. Ilic, A. Kiani, S. Low, J. McDonald, M. Roozbe-hani, T. Samad, J. Stoustrup, and P. Varaiya. IEEE Vision for Smart GridControls: 2030 and Beyond. IEEE Standards Association, New York NY,2013.
[3] A. M. Farid and A. Muzhikyan. “The Need for Holistic AssessmentMethods for the Future Electricity Grid,”. In GCC CIGRE Power 2013,pages 1–12, Abu Dhabi, UAE, 2013.
[4] M. S. Amin and B. F. Wollenberg. “Toward a smart grid: power deliveryfor the 21st century,”. IEEE Power and Energy Magazine, vol. 3(No.5):34–41, 2005.
[5] R. Majumder. “Some Aspects of Stability in Microgrids,”. IEEETransactions on Power Systems, vol. 28(No. 3):3243–3252, August2013.
[6] S. Cole and R. Belmans. “MatDyn, A New Matlab-Based Toolboxfor Power System Dynamic Simulation,”. IEEE Transactions on PowerSystems, vol. 26(No. 3):1129–1136, August 2011.
[7] J. P. Hespanha, P. Naghshtabrizi, and Y. Xu. “A survey of recent resultsin networked control systems,”. Proceedings of the IEEE, vol. 95(No.1):138–172, 2007.
[8] A. Bidram and A. Davoudi. “Hierarchical Structure of MicrogridsControl System,”. IEEE Transactions on Smart Grid, vol. 3(No.4):1963–1976, December 2012.
[9] R. Roche, S. Natarajan, A. Bhattacharyya, and S. Suryanarayanan. “AFramework for Co-simulation of AI Tools with Power Systems AnalysisSoftware,”. In 2012 23rd International Workshop on Database andExpert Systems Applications, pages 350–354. Ieee, September 2012.
[10] E. J. Ng and R. A. El-Shatshat. “Multi-Microgrid Control Systems(MMCS),”. In 2010 IEEE PES General Meeting, 25-29 July, pages1–6. IEEE, July 2010.
[11] R. H. Lasseter. “Smart Distribution: Coupled Microgrids,”. Proceedingsof the IEEE, vol. 99(No. 6):1074–1082, June 2011.
[12] C. M. Colson and M. H. Nehrir. “Comprehensive Real-Time MicrogridPower Management and Control With Distributed Agents,”. IEEETransactions on Smart Grid, vol. 4(No. 1):617–627, March 2013.
[13] C. M. Colson, M. H. Nehrir, and R. W. Gunderson. “Distributed multi-agent microgrids: a decentralized approach to resilient power systemself-healing,”. In 2011 4th International Symposium on Resilient ControlSystems, pages 83–88. IEEE, August 2011.
[14] Y. Gu, P. Li, Y. Pan, H. Ouyang, D. Han, and Y. Hao. “Development ofmicro-grid coordination and control overview,”. IEEE PES InnovativeSmart Grid Technologies, pages 1–6, May 2012.
[15] S. N. Bhaskara and B. H. Chowdhury. “Microgrids — A review ofmodeling, control, protection, simulation and future potential,”. In 2012IEEE Power and Energy Society General Meeting, pages 1–7. IEEE,July 2012.
[16] D. Kondoleon, L. Ten-Hope, T. Surles, and R. L. Therkelsen. “TheCERTS MicroGrid Concept,”. In Integration of Distributed EnergyResources – The CERTS MicroGrid Concept. The Consortium forElectric Reliability Technology Solutions (CERTS), 2002.
[17] C. M. Colson and M. H. Nehrir. A review of challenges to real-timepower management of microgrids. In 2009 IEEE Power & EnergySociety General Meeting, pages 1–8. IEEE, July 2009.
[18] H Saadat. Power System Analysis. McGraw Hill, 2004.[19] T. L. Vandoorn, B. Zwaenepoel, J. D. M. De Kooning, B. Meersman,
and L. Vandevelde. “Smart microgrids and virtual power plants in ahierarchical control structure,”. In 2011 2nd IEEE PES InternationalConference and Exhibition on Innovative Smart Grid Technologies,pages 1–7. IEEE, December 2011.
[20] H. Abdelhalim, A. M. Farid, A. A. Adegbege, L. Rouco, and K. Youcef-Toumi. “Small-Signal Stability Effects of Turbine Governors on PowerSystems with High Penetrations of Integrated Wind Power,”. In IEEEPower and Energy Society Innovative Smart Grid Technologies Confer-ence, pages 1–6, Washington, D.C., United states, 2013.
[21] A. L. A. Dimeas and N. D N.D. Hatziargyriou. “Operation of aMultiagent System for Microgrid Control,”. IEEE Transactions onPower Systems, vol. 20(No. 3):1447–1455, August 2005.
[22] A. Naderlinger, J. Templ, S. Resmerita, and W. Pree. “An AsynchronousJava Interface to MATLAB,”. In Proceedings of the 4th InternationalICST Conference on Simulation Tools and Techniques, pages 57–62.Acm, 2011.