A. III. Molecular Symmetry and Group Theory
34
1 A. III. Molecular Symmetry and Group Theory F. Albert Cotton, Chemical Application of Group Theory, Wiley, 1990. M. Tinkam, Group Theory and Quantum Mechanics, McGraw- Hill, 1964. Peter F. Bernath, Spectra of Atoms and Molecules, Ch 2, 3, 4. P. R. Bunker, Molecular Symmetry and Spectroscopy, NRC Research Press, 1998.
description
A. III. Molecular Symmetry and Group Theory. F. Albert Cotton, Chemical Application of Group Theory, Wiley, 1990. M. Tinkam , Group Theory and Quantum Mechanics, McGraw-Hill, 1964. Peter F. Bernath , Spectra of Atoms and Molecules, Ch 2, 3, 4. - PowerPoint PPT Presentation
Transcript of A. III. Molecular Symmetry and Group Theory

1
A. III. Molecular Symmetry and Group Theory
F. Albert Cotton, Chemical Application of Group Theory, Wiley, 1990. M. Tinkam, Group Theory and Quantum Mechanics, McGraw-Hill, 1964.Peter F. Bernath, Spectra of Atoms and Molecules, Ch 2, 3, 4. P. R. Bunker, Molecular Symmetry and Spectroscopy, NRC Research Press, 1998.

2
(a) Groups: Definitions and Theorems A group is a set of elements A, B, C, …such that a form of
multiplication may be defined that associates a third element with any ordered pair. The multiplication must satisfy the following requirements:1. The group is closed.
If A, B G, then AB G, A, B.∈ ∈ ∀2. The associative law holds.
A(BC) = (AB)C3. The identity element E exists such that
EA = AE = A, A.∀4. For every element A in the group there is an inverse A-1 such that
AA-1 = A-1 A = E

3
More Definitions The order of a group is the number of elements in the
group. The order can be infinite, but for the most part, we will deal with finite groups.
An Abelian group is commutative.AB = BA, A, B∀
A subgroup is a group whose elements are a subset of a larger group, using the same multiplication rule.
If A is conjugate to B, then B = X-1AX, for some X ∈G.
A complete set of elements that are conjugate to one another are called a class.
A cyclic group of order n has elements A, A2, A3, A4, A5, … An-1, and E (= An).

4
Mappings between Groups Two groups G and G′ are isomorphic if there is a one-
to-one correspondence between the elements A, B, … of one group and the elements A′, B′, … of the other group such that AB = C implies A′B′ = C′ and vice versa.
Two groups G and G′ are homomorphic if there is a one-to-many correspondence between each element A of one group and two or more elements A1′, A2′, … of the other group such that AB = C implies Ai′Bj′ {C∈ k′} for all Ai′, Bj′. (Here, “many” means 1, 2, or more. So an isomorphism is the special case of a homomorphism, where “many” = 1.)

5
Theorems and Examples A group multiplication table gives the product
(column element) × (row element)
Theorem: If A, B, C G, and B≠C, then AB≠AC and ∈BA≠CA.
G1 E
E
G2 E A
EA

G3 E A B
EAB
6
Theorem: Each element is represented once and only once in each row and in each column of the group multiplication table.
What choices do we have to fill in this table? Is the group cyclic? Abelian? Are there subgroups?

7
(b) Molecular Symmetry Symmetry operations leave the molecule – or more
precisely, the Hamiltonian of the molecule – unchanged. Several different kinds of molecular symmetry:
1. Geometric symmetry that reflects the shape of the molecule
2. Permutation of identical nuclei.3. Inversion of the molecule, the is (x, y, z) (-x, -y, -z) for
all electrons and nuclei.4. Permutation of the electrons.5. Rotation of the molecular about its center of mass (3
Euler angles).6. Translation of the molecule (x, y, z) (x+a, y+b, z+c).7. Time invariance t t+a8. Time reversal symmetry t -t.
Each kind of symmetry yields useful concepts.Symmetries 2. +3. are equivalent to 1. for rigid molecules.

8
(b) Molecular Symmetry Symmetry operations leave the molecule – or more
precisely, the Hamiltonian of the molecule – unchanged. Several different kinds of molecular symmetry:
1. Geometric symmetry that reflects the shape of the molecule
2. Permutation of identical nuclei.3. Inversion of the molecule, the is (x, y, z) (-x, -y, -z) for
all electrons and nuclei.4. Permutation of the electrons.5. Rotation of the molecular about its center of mass (3
Euler angles).6. Translation of the molecule (x, y, z) (x+a, y+b, z+c).7. Time invariance t t+a8. Time reversal symmetry t -t.
Each kind of symmetry yields useful concepts.Symmetries 2. +3. are equivalent to 1. for rigid molecules.
Microscopic reversibility
Point groups
Permutation-inversion group theory
The Pauli Principle
Conservation of angular momentum
Conservation of energy
Conservation of linear momentum

9
Point Groups
Symmetry Element Operation
Plane (σv, σh) Reflection in the plane
Center of symmetry (i) Inversion through the center
Proper axis (Cn … (Cn)n=E) Rotation by a multiple of 360˚/n
Improper axis (Sn … (Sn)2n=E) One or more reptitions of a rotation followed by a reflection in a plane to the rotation axis.⊥

10
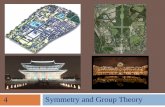
Flow chart for determining Point Group SymmetryBernath, p 52

11
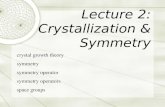
Example: Dichloromethane
a
b 1
2
y
x
z

12
(c) Representations of Groups A representation of an abstract group is any group composed
of concrete mathematical entities that is homomorphic to the original group.
We will be concerned with representations of symmetry groups by n×n square matrices, where n is the dimensionality of the representation.
A vector may be used to generate a matrix representation.
The vector generating the representation may have any number of components.
Functions expressed in terms of basis functions may also be used.
Matrix
Aij
Vector, v
new vector
v x,y,z

13
Types of Representations The identical representation – all 1’s. A faithful representation – isomorphic Reducible representations – dimensionality is reduced by
similarity transformations.
Irreducible representations – no further reduction in dimensionality is possible.
The character of a representation is the sum of the diagonal elements:
A Aiii1
n
0
0
Γ1(R)
Γ2(R)
Γ3(R)

C2V Example
Representation matricies based on
Dimensionality? 3 Faithful? YES Identical? NO Reducible? YES
14
€
r = x,y,z( )
€
E =1 0 00 1 00 0 1
⎡
⎣
⎢ ⎢ ⎢
⎤
⎦
⎥ ⎥ ⎥
C2 =−1 0 00 −1 00 0 1
⎡
⎣
⎢ ⎢ ⎢
⎤
⎦
⎥ ⎥ ⎥
σ V =1 0 00 −1 00 0 1
⎡
⎣
⎢ ⎢ ⎢
⎤
⎦
⎥ ⎥ ⎥
σ V′ =
−1 0 00 1 00 0 1
⎡
⎣
⎢ ⎢ ⎢
⎤
⎦
⎥ ⎥ ⎥

15
Similarity Transformations
0
0
Γ1(R)
Γ2(R)
Γ3(R)

16
The Great Orthogonality Theorem (GOT) Let R denote the group operations, A, B, C, … Let Γi(R) be the matrix for the operation R in the ith irreducible
representation. It has the elements Let Γi(R)mn. The theorem states
where is the order of the group, and li is the dimensionality of the ith irreducible representation.
€
Γi R( )mn( ) Γ j R( ) ′ m ′ n ( )*
R∑ = h
li
δm ′ m δn ′ n δ ij

17
Theorems derived from the GOT1. The sums of the squares of the dimensions of the irreducible
representations of a group is equal to the order of the group:
2. The sum of the squares of the characters of any irreducible representation equals h:
3. The vectors whose components are the characters of two different irreducible representations are orthogonal:
if i≠j.
4. In a given representation (reducible or irreducible), the characters of all matrices belonging to operations of the same class are identical.
5. The number of irreducible representations is equal to the number of classes.
li2
i h
€
i R( )( )2
R∑ = h
i R j R R 0

18
Example: Character Table for C3V
C3V
A1
A2
E

19
Reducing Reducible Representations We choose a similarity transformation, such that when it is
applied to each representation matrix of a reducible representation, each representation become block diagonal as at left.
In general the irreducible representation Γj appears aj times:
To find aj the proceed as follows:
Thus
0
0
Γ1(R)
Γ2(R)
Γ3(R)
R a j j R j
R i R a j j R i R j
R
R
a j j R i R R
j a jhij
j byGOT
aih
ai 1h
R i R R

20
Example Suppose that for a redicuble representation, χ(R) = 5 2 -1.
Find the irreducible representations that comprise this reducible rperesentation.
C3V E 2C3 3σV
A1 1 1 1
A2 1 1 -1
E 2 -1 0

21
(d) Group Theory and Quantum Mechanics Transformation operators:
Operate on the coordinate system:
€
′x = Rx

22
(d) Group Theory and Quantum Mechanics Transformation operators:
Operate on a function:
€
′f x( ) = PR f x( )[ ]

23
The Group of the Schroedinger Equation

24
The Group of the Schroedinger Equation

25
Labeling of Quantum States Wavefunctions transform under group operations according to
the irreducible representations of the group. Label quantum states accordingly!
The irreducible representations have a systematic nomenclature (with some exceptions) that is used in spectroscopy and quantum chemistry.
See standard character tables in the back of Bernath and elsewhere.
Examples: Atoms: S, P, D, … (full rotation group) Homonuclear diatomics: Σg
+, Πu, … (D∞h) CH2Cl2: A1, A2, B1, B2 (C2V) CH3F: A1, A2, E (C3V) CH3OH (rigid): A′, A″ (CS) CH3OH (with internal rotation): A1, A2, E (G6) CH4: A1, A2, E, T1 [F1], T2 [F2] (Td)

26
The Direct Product Suppose that X1, X2, X3, …, Xm, and Y1, Y2, Y3, …, Yn are two sets of functions
that are basis for representations of the group:
and
where Γ(X) and Γ(Y) are the representations derived from the two sets of basis functions.
Then we can operate on a product of functions Zs = XiYk:
and Γ(Z) is the representation generated by the product Zs. We use the direct product notation: Γ(Z) = Γ(X) ⊗ Γ(Y)
€
PR X i = Γ jiX( ) R( )X j
j=1
m
∑
€
PRYk = ΓlkY( ) R( )Yl
l=1
n
∑
€
PR X iYk( ) = Γ jiX( ) R( )Γlk
Y( ) R( )X jYll=1
n
∑j=1
m
∑
≡ Γ ji,lkZ( ) R( )X jYl
l=1
n
∑j=1
m
∑

27
Characters of Direct Product Representations If Γ(X)(R) is an m×m matrix and Γ(Y)(R) is an n×n, then Γ(Z)
(R)is an mn×mn matrix, and might be a reducible representation.
The character of Γ(Z)(R) is
€
Z R( ) = Γ ji,lkZ( ) R( )
l=1
n
∑j=1
m
∑
= Γ jiX( ) R( )Γlk
Y( ) R( )l=1
n
∑j=1
m
∑χ Z R( ) = χ X R( )χ Y R( )

28
Identifying Non-Zero Matrix Elements
Office Hour & ProblemsFriday, Jan 21, 3-4 PM in KNCL 317

29
Identifying Non-Zero Matrix Elements Theorem: If Z = XY, then Γ(Z) contains the totally symmetric
representation only when Γ(X) and Γ(Y) contain at least one irreducible representation in common.
This theorem allows for the quick identification of non-zero matrix elements.

30
Symmetry-Adapted Linear Combinations The procedure described below is sometimes called the
“basis function generating machine.” It enables us to start with any function defined in the relevant
coordinate space and project out a function that transforms as any desired irreducible representation of the applicable group. (If the starting function was chosen poorly, then you might get zero, but then one just needs to try again with a different starting function.)
The procedure is good for finding molecular orbitals or vibrational wavefuntions with the desired symmetry properties.

31
Symmetry-Adapted Linear Combinations Suppose that we have a set of li orthonormal functions
ϕ1i, ϕ2
i, … that form a basis for the ith irreducible representation Γi
The action of the group operation PR produces a linear combination of the other basis functions:
Multiply both sides by and sum over the group operations:
€
PRφti = φs
iΓsti R( )
s∑
€
Γ ′s ′ t j R( )[ ]
*
€
Γ ′s ′ t j R( )[ ]
*PRφt
i
R∑ = φs
iΓsti R( )
s∑ Γ ′ s ′ t
j R( )[ ]*
R∑
= φsi Γst
i R( )R∑ Γ ′ s ′ t
j R( )[ ]*
s∑
= φsiδ ijδs ′ s δ t ′ t
hlis
∑
= φ ′ s i δ ijδt ′ t
hli

32
Symmetry-Adapted Linear Combinations Based on the above result, we define the projection operator
which has the action Now consider a a general function that is a linear
combination of the various basis functions:
Then
If we set s′ = t′, then Thus we can project any desired symmetry component out of a general function.
€
P ′ s ′ t j =
l j
hΓ ′ s ′ t
j R( )[ ]*PR
R∑
€
P ′ s ′ t j φt
i = φ ′ s i δ ijδt ′ t
€
Φ
€
Φ atiφt
i
i,t∑
€
P ′ s ′ t j Φ = at
i P ′ s ′ t j φt
i
i,t∑ = at
i φ ′ s i δ ijδ t ′ t
i,t∑
= a ′ t j φ ′ s
j
€
P ′ s ′ s j Φ = a ′ s
j φ ′ s j

33
Projections with Characters Only The problem is that the full representation matrices are not
available in charater tables. Furthermore, the full representation matrices are only defined to within a similarity transformation.
Define
This projection operator projects a given function onto the subspace of the basis, it will generate symmetrized basis functions of the desired irreducible representation, but where the dimensionality of the represention is 2 or higher, we don’t have control over which of the degenerate functions we will get, and the degenerate functions that we do get my not be orthogonal.
€
P j = P ′ s ′ s j
′ s ∑ =
l j
hΓ ′ s ′ s
j R( )[ ]*PR
R∑
′ s ∑
∴ P j =l j
hχ j R( )PR
R∑

34
Example: π Orbitals of the Cyclopropenyl Radical.
Find the symmetry-adapted linear combinations.
Office Hour & ProblemsFriday, Jan 21, 3-4 PM in KNCL 317