
A GPS Based Time Synchroniser - GP&C
25
FOA-R--99-01085-409--SE March 1999 ISSN 1104-9154 Technical Report Division of Systems and Underwater Technology SE-172 90 STOCKHOLM A GPS Based Time Synchroniser Gunnar Sundin ¯ke Arvidsson Jörgen Pihl Håkan Lans
Transcript of A GPS Based Time Synchroniser - GP&C

FOA-R--99-01085-409--SEMarch 1999
ISSN 1104-9154
Technical Report
Division of Systems and Underwater Technology
SE-172 90 STOCKHOLM
A GPSBased Time Synchroniser
Gunnar SundinÅke Arvidsson
Jörgen PihlHåkan Lans

1
FOA-R--99-01085-409--SEMarch 1999
ISSN 1104-9154
A GPSBased Time Synchroniser
Gunnar SundinÅke Arvidsson
Jörgen PihlHåkan Lans
DEFENCE RESEARCH ESTABLISHMENTDivision of Systems and Underwater TechnologySE-172 90 STOCKHOLMSweden

2
Date of issueMarch 1999
Document title
A GPS Based Time Synchroniser
Issuing organization
Defence Research EstablishmentDivision of Systems and UnderwaterTechnologySE-172 90 STOCKHOLMSweden
Distributor (if not issuing organization)
Author(s)
Gunnar SundinÅke ArvidssonJörgen PihlHåkan Lans
Initiator of sponsoring organization
Project managerJörgen Pihl
Scientifically and technically responsibleGunnar Sundin
Abstract
Pages 24 p. Price Acc. to pricelist
Document ref. No., ISRNFOA-R--99-01085-409--SE
Project No.E6031
Project name (abbrev. if necessary)Surveillance sonars
ISBNISSN 1104-9154
Further bibliografic information Language English
Key words
The report describes a GPS synchronised clock. Its intended use is to synchronise transmitter and receiverin a bistatic sonar system. It uses the one-second-pulse form a GPS receiver to synchronise the clock toUTC time and at the same time to steer the built in oscillator to exactly 5 MHz. After the synchronisationthe clock is estimated to keep its time to within a few milliseconds for a period of two months. Thus theclock can be used even if the GPS signal is not available for a long time as in a submarine. When the GPSsignal is available, the accuracy of the clock is expected to be better than 100 ns. With a built in directdigital synthesis chip the clock can also deliver a sinusoidal signal which can be modulated in amplitude,frequency or phase.
Synchronised clock, GPS, Bistatic Sonar, Multistatic Sonar, Direct Digital Synthesis

3
Dokumentets titel i översättning
Dokumentets utgivare
Försvarets forskningsanstaltAvdelningen för Styrning, simulering ochundervattensteknik172 90 STOCKHOLM
Distributör (om annan än ovan)
Upphovsman(män)
Gunnar SundinÅke ArvidssonJörgen PihlHåkan Lans
En GPS-synkroniserad klocka
Uppdragsgivare
ProjektansvarigJörgen Pihl
FackansvarigGunnar Sundin
Sammanfattning
Omfång 24 s Pris Enl prislista
Dokumentbeteckning, ISRNFOA-R--99-01085-409--SE
Dokumentets datumMars 1999
UppdragsnummerE6031
Projektnamn (ev förkortat)Spaningssonarer
ISBNISSN 1104-9154
Övriga bibliografiska uppgifter Språk Engelska
Nyckelord
Rapporten beskriver en GPS-synkroniserad klocka. Den är avsedd att synkronisera sändare och mottagare iett bistatiskt sonarsystem. Den använder ensekundpulserna från en GPS-mottagare för att synkronsera klockantill UTC-tid och styr på samma gång den inbyggda oscillatorn till exakt 5 MHz. Efter synkroniseringen för-väntas klockan hålla tiden inom ett par millisekunder under en tid av två månader. Klockan kan alltså ävenanvändas då GPS-signalen inte är tillgänglig under lång tid som i en ubåt. När GPS-signalen är tillgänglig ärklockans förväntade noggrannhet bättre än 100 ns. Med ett inbyggt DDS-chip (direct digital synthesis) kanklockan även lämna en sinussignal som kan moduleras i amplitud, frekvens och fas.
Synkroniserad klocka, GPS, Bistatisk sonar, Multistatisk sonar, Direct Digital Synthesis

4
Contents
1. Introduction 51.1 The Multistatic Sonar 51.2 Requirements 6
2. Design and Operational Principle 62.1 Basic ideas behand the GPS synchronisation unit 62.2 PCB 62.3 Main components 72.4 Software 8
3. First test results 8
4. Conclusion 10
5. References 10
Appendix A: Electrical circuit design A-1
Appendix B: Quick Logic Circuit diagrams B-1
Appendix C: Description of I/O ports C-1

5
1. Introduction
1.1 The Multistatic Sonar
Figure 1. Examples of Multistatic Sonar in active surveillance. One transmitter is fixed at the bottom, and the otheronboard the surface ship. Receivers are positioned at the surface (sonobouys) and onboard the own submarine. Thepositions of the receivers are unknown to the target submarine.
Modern submarines and surface ships are becomingmore and more quiet. As a result, the detection distancesfor passive sonar are getting shorter. A possible wayaround this problem is to use active sonar, which mightgive you the detection distances you need. However,using active sonar might be undesirable for a submarine,which wants to operate silently and covertly. By puttingthe transmitter on a co-operating platform and the re-ceiver on the submarine, it can still be silent but gainfrom the longer detection distances obtainable by theactive sonar. Such a sonar is called a Multistatic Sonar(Figure 1).
Multistatic sonar has been tested by several nations(1). At FOA we are just now setting up a test system toinvestigate the performance of multistatic sonar in theBaltic. Figure 2 shows a schematic picture of an expe-rimental setup. In this example the transmitter, the tar-get and the receiver are at the corners of a triangle (Tr-T-R). To know the position of the target the receiverhas to know the length of the triangle side C and thedirection to the target. This can be computed if thedistances A and (B+C) are known. Then the target must
lie on an ellipse, and if the direction to the target isknown its position can be uniquely determined. Thus ifthe position of the sender and the time of the transmis-sion is known the position of the target can bedetermined.
By using several transmitters, and/or severalreceivers, we obtain a pattern of overlapping ellipses.In such cases the target position can be determined evenif the direction is not known.
Figure 2. Principle of Multistatic Sonar
T
Tr RA
BC

6
Counter
D/A-converter
5 MHzoscillator
Freq.multiplierx 10
µ-processor
GPSreceiver
50 MHz
1 secpulse
controlvoltage
1.2 Requirements
In multistatic sonar the receiver must know the timewhen the transmitter emits a pulse. A radio link or adirect cable connection usually achieves this timesynchronisation. However, if the receiver is on asubmarine or another submerged platform, we can notestablish a communication link. One way in such a caseto obtain time synchronisation is to have very accurateclocks at the transmitter and receiver. These clocks needto be accurate enough so that negligable errors areintroduced in the signal processing. In principle, theaccuracy in timing should be better than the accuracyin positioning and target localisation. The latter dependson the emitted pulse type and length, the processingmode, and the selected range of search. The bestobtainable range estimates of a surveillance sonar areof the order of one meter, corresponding to a fewmilliseconds accuracy in time. The goal of our designis to achieve an accuracy of one millisecond over a pe-riod of two months, which corresponds to an estimatedmaximum time for a submarine operation.
2. Design and operationalprinciples
2.1 Basic ideas behind the GPSsynchronisation unit
The main components of the time synchronisation unitare a very stable oscillator, a GPS receiver, amicroprocessor and a logic unit built into a FPGAcircuit.
Figure 3 shows the basic structure of thesynchronisation control loop. The frequency of the os-cillator can be varied by changing the voltage appliedto one of its connections, but only within a small rangearound 5 MHz. With the frequency multiplier, theaccuracy of the control loop is increased tenfold.
A period counter counts the periods of the 50 MHzsignal from the frequency multiplier for an integernumber of seconds. The microprocessor compares theoutput from the counter with the corresponding valuefrom a true 50 MHz oscillator. If a difference isobserved, it sends a command to the D/A converter tochange the frequency of the oscillator to make it closerto 5 MHz.
The logic unit of the counter is contained in a Quick-Logic FPGA chip. The normal procedure to start thesynchronisation process is to use one second as theinitial measurement time, giving a coarse adjustmentof the oscillator frequency. The next step is to increasethe measurement time and make finer adjustments untilthe stability limit of the oscillator is reached.
The stability of the oscillator within one day(5x10-10 ), corresponds to 1 period of 50 MHz in 40seconds.
The main purpose of the clock is to make it possibleto have synchronised time at separate measurementsites with high accuracy. However, the design of theunit is so versatile that it can be used for various otherapplications. A possible use is for frequencymeasurements or measurements of time delays.
The unit is also equipped with a digital direct syn-thesis chip (DDS). This chip can produce a sinusoidalsignal with precisely controlled frequency, phase andamplitude. The output frequency can be set to anyfrequency from DC to 50 MHz with a resolution ofabout 1/100 Hz . The unit also has a microphone in-put. With this, the DDS signal can be modulated infrequency, phase or amplitude in real time.
Figur3 Basic structure of the GPS synchronisation unit

7
Figure 4 The PCB.
2.3 Main components
2.3.1 Oscillator
The oscillator, a PMTP 5.1E, with a frequency of 5MHz is manufactured by CEPE (Compagnied´électronique et de piézo-électricité). It is a crystaloscillator operated in a capsule with regulated tempera-ture, enclosed in a small sealed metal package. It has ashort term stability (up to 10 seconds) of 10-12. The oneday stability is 5x10-10 and the one month stability is10-8(reference 3).
2.3.2 GPS receiver
The GPS receiver is of the type Rockwell TU30-D140�Jupiter�. It is a 12 parallel-channel receiver. It canaccept Differential GPS (DGPS) corrections in theRTCM SC-104 format. Its size is 71 x 41 x 11 mm(reference 2).
5 MHzoscillator
GPSreceiver
EpromFlashprom Ram
Micro-processor
Programmablelogic
DDSmodulator
2.2 PCB
The PCB is a two layer board, 260x200 mm large, asshown in figure 4.
Figure 5 The GPS receiver
EPROMFlash
PROM RAM

8
FUNCTIONAL BLOCK DIAGRAM
32
32
12
10
10
10
10
10SIN
COS
12
10-BIT DAC
PHASEACCUMULATOR
SIN/COSROM
IQMOD [9:0]
IOUT
COMP
FS ADJUST
SDATA
SCLK
GND
RESETTEST
CLOCK
VAA
WR CS
IOUT
AD7008
32-BIT SERIAL REGISTER
32-BIT PARALLEL REGISTER COMMAND REG
MPU INTERFACE TRANSFER LOGIC
FULLSCALEADJUST
10
IQMOD [19:10]
12
PHASE REG
D0 D15
32
32
FSELECT
MUX
FREQ1 REG
TC0 TC3 LOAD
Σ10
Σ
FREQ0REG
Σ
SLEEP
VREF
Figure 6. The DDS Functional Block Diagram
2.3.5 Quick-Logic programmable logicMost of the logic for counters and time-keeping isprogrammed in a Quick-Logic programmable chip,QL2007 (5). This means that it is easy to change thebehaviour of the clock and to add new functions withouthaving to change the main PC-board.
2.3.3 MicroprocessorThe microprocessor is a Hitachi HD64180 eight-bit pro-cessor. It is connected to three different memory chips– a 16 kB EPROM, a 16 kB Flashprom and a 32 kBRAM chip.
2.4 SoftwareThe EPROM contains a monitor program with debug-ging tools, flash memory programming routines, aroutine for loading program from a host, and a realtime kernel. The kernel handles the time scheduling ofseveral concurrently running tasks. The executable codeof the tasks is stored in the flash PROM or RAM.
The real-time tasks interprete the GPS receivermessages and the host commands, and handle the GPSsynchronisation.
In the normal use of the clock a simple commandlanguage is used. It includes commands to control thetiming of the output pulses, the pulse lengths and thesignal waveforms.
With the aid of a Windows based Fortran programthe user can set parameters to control the pulse shapesand timing, as well as display the GPS position, andperform frequency and time measurements.
2.3.4 Direct Digital Synthesis chipThis is a AD7008 CMOS DDS Modulator manu-factured by Analog Devices. This chip can generatesinusoidal signals with frequencies from DC up to 50MHz in steps of about 1/100 Hz (50000000 / 232) andwith the same stability as the 5 MHz oscillator. Thesignal can be modulated in amplitude, frequency andphase. The speed of the modulation is only limited bythe microprocessor (figure 6 and reference 4).

9
Figure 7. Power on behaviour of GPS synchronised clock. The green curve is the D/A control signal and the blue curvethe deviation from 50 MHz. The vertical scale for the difference signal is in Hz. The D/A control signal has an allowed
interval of ±32767.
Figure 8. Close up of the beginning of phase three in the control loop.
3. First test results
Figures 7 - 9 show the behaviour of the clock duringthe first minutes after power on. The blue curve showsthe difference between the output frequency of the clockmeasured between two consecutive GPS one-second-pulses and 50 MHz. The negative spikes in the curveare due to a counter being reset at regular intervals.You should only look at the positive envelope of the
curve. The green curve is the control signal to the D/A-converter that steers the oscillator frequency. We canse three distinct phases of the control loop. During thefirst few seconds the D/A output is steered in very coarsesteps to find a value where the frequency drift of theoscillator is towards 50 MHz. Then, in the second phase,the D/A converter is left in that state and the difference
0 100 200 300 400 500 600 700-3
-2.5
-2
-1.5
-1
-0.5
0
0.5
1
1.5x 10
4
seconds after power on
D/A control signal
Difference signal
200 210 220 230 240 250 260 270 280-300
-200
-100
0
100
200
seconds after power on

10
5. References
1. L. Mozzone: �Deployable multistatic active sonar:the cycle of system design, tests and data analy-sis�, Oceans� 98 conference, Nice, France Sep-tember 1998.
2. Rockwell Semiconductor Systems, �Jupiter�Global Positioning System (GPS) Receiver (PartNo. TU30-D140-221/231). Data sheet January 19,1997.
3. CEPE Thomson-CSF, PMTP 5.1E, OvenControlled Crystal Oscillators. Data Sheet.
4. Analog Devices, CMOS DDS ModulatorAD7008 Rev B. C1791a-10-2/95. Data sheet1995.
5. Quick Works Users Guide ver. 7.0, 1991-1998.4. Conclusion
Preliminary tests of the systems indicate that theaccuracy of the synchronised clock far exceeds ourrequirements. Further work is needed to verify the long-term stability. We also need to build a second clockunit to make a complete system for multistatic sonar.
300 350 400 450 500 550 600 650
-6
-4
-2
0
2
4
6
seconds after power on
Figure 9. Close up of the second half of the power up sequence.
(blue curve) is monitored. After 241 seconds when thefrequency just reaches 50 MHz the third phase of thecontrol loop begins. The stability of the oscillator isnow so good so that it is worth controlling it with theD/A-converter. As can be seen from the blue curve,the behaviour of the control loop is excellent. The meanabsolute difference is only 0.65 periods correspondingto 13 nanoseconds from 250 seconds after power on tothe end of the curve. After about 600 seconds the D/Aoutput has stabilised indicating that the oscillator ovenhas reached its final temperature. At this point the nextphase in the control loop should start with differencemeasurements over successively longer periods andmore fine-tuning of the oscillator. That part of the pro-gram however is not yet written.

A-1
Appendix A
Design of the electrical circuit
Contents A-1
Overview diagram of the unit A-2
Crystal oscillator and PLL frequency multiplier A-3
Analogue inputs A-4
Analogue outputs A-5
Microphone amplifier with low pass filters and A/D-converter A-6
Serial communication A-7

A-2

A-3

A-4

A-5

A-6
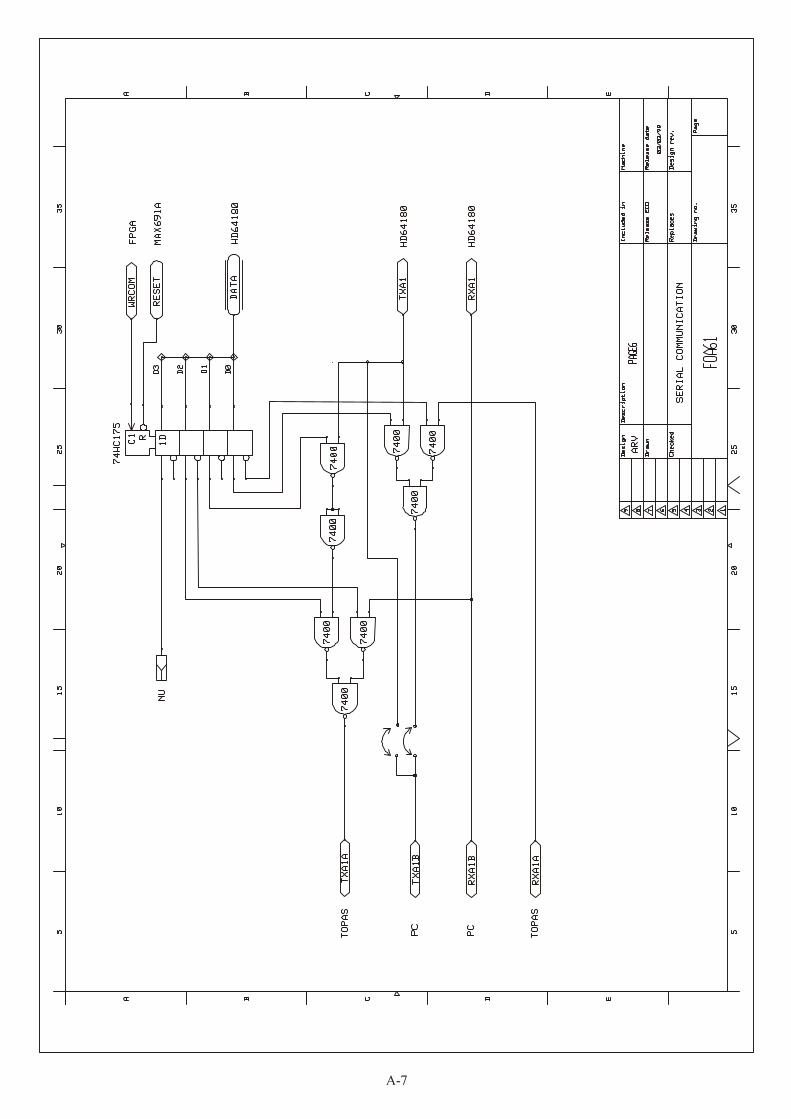
A-7

B-1
Appendix B
Quick logic circuit diagrams
Contents B-1
Counters and counter registers B-2
Data out address logic B-3
Address decoder B-4
D/A and A/D converter interface B-5

B-2
12
34
56
78
12
34
56
78
ABCD
ABCD
HD
PA
D
I_585
66
HD
PA
D
I_564
65
HD
PA
D
I_565
63
CK
PA
D
I_552
22
OR
2i0
BIP
AD
I_28158
BIP
AD
I_28257
BIP
AD
I_28356
BIP
AD
I_28455
BIP
AD
I_28554
BIP
AD
I_28651
BIP
AD
I_27960
BIP
AD
I_28059
UP
FX
CT
4
CLR
D[0:3]
EN
LOA
DQ
[0:3]U
PF
XC
T4
CLR
D[0:3]
EN
LOA
DQ
[0:3]
UP
FX
CT
4
CLR
D[0:3]
EN
LOA
DQ
[0:3]
GP
SC
28
CLR
D[0:27]
LOA
DQ
[0:27]
OR
6i6
AN
D14i7
AN
D3i0
AN
D3i0
MU
X4x0
S0
S1
INV
INV
INV
INV
NO
R2i0
NO
R2i0
UP
FLC
T4
CLR
D[0:3]
LOA
DQ
[0:3]
AN
D5i0
MU
X2x0
S
MU
X2x0
S
GP
SM
2x8M
UX
0[0:7]
MU
X1[0:7]
SE
L
MU
XO
[0:7]
GP
SM
2x8M
UX
0[0:7]
MU
X1[0:7]
SE
L
MU
XO
[0:7]
GP
SM
2x8M
UX
0[0:7]
MU
X1[0:7]
SE
L
MU
XO
[0:7]
GP
SM
U4X
8
INB
U1[0:7]
INB
U2[0:7]
INB
U3[0:7]
INB
U4[0:7]
S0
S1
OU
TB
[0:7]
GP
SC
OM
P
D1[0:7]
D2[0:7]
G1
XO
UG
PS
CO
MP
D1[0:7]
D2[0:7]
G1
XO
U
CK
tPA
D
I_94
64
BU
FF
BU
FF
BU
FF
BU
FF
BU
FF
BU
FF
BU
FF
BU
FF
BU
FF
BU
FF
BU
FF
BU
FF
BU
FF
BU
FF
BU
FF
BU
FF
BU
FF
BU
FF
BU
FF
BU
FF
BU
FF
BU
FF
BU
FF
BU
FF
BU
FF
BU
FF
BU
FF
BU
FF
AN
D2i1
AN
D2i1
AN
D2i1
AN
D2i1
DF
F
I_64
DQ
DF
FP
C
I_131
CLR
D PR
E
Q
DF
FP
C
I_162
CLR
D PR
E
Q
DF
FP
C
I_36
CLR
D PR
E
Q
DF
FP
C
I_50
CLR
D PR
E
Q
DF
FP
C
I_37
CLR
D PR
E
Q
DF
FP
C
I_174
CLR
D PR
E
Q
DF
FP
C
I_129
CLR
D PR
E
Q
DF
FP
C
I_166
CLR
D PR
E
Q
DF
FP
C
I_137
CLR
D PR
E
Q
AN
D2i0
OU
TP
AD
I_17537
OU
TP
AD
I_12710
OU
TP
AD
I_12631
OU
TP
AD
I_6715
OU
TP
AD
I_6614
OU
TP
AD
I_6332
OU
TP
AD
I_16836
OU
TP
AD
I_13935
OU
TP
AD
I_13034
OU
TP
AD
I_13827
OU
TP
AD
I_18841
OU
TP
AD
I_2338
OU
TP
AD
I_2230
INP
AD
I_586
29
INP
AD
I_543
9 INP
AD
I_544
7 INP
AD
I_545
8
INP
AD
I_521
5 INP
AD
I_522
3 INP
AD
I_523
2 INP
AD
I_524
6 INP
AD
I_525
84
INP
AD
I_287
78INP
AD
I_288
79INP
AD
I_289
80INP
AD
I_290
81INP
AD
I_291
83
RE
GE
8D
[0:7]
EN
Q[0:7]
RE
GE
8D
[0:7]
EN
Q[0:7]
RE
GE
8D
[0:7]
EN
Q[0:7]
RE
GE
8D
[0:7]
EN
Q[0:7]
RE
GE
8D
[0:7]
EN
Q[0:7]
RE
GE
8D
[0:7]
EN
Q[0:7]
RE
GE
8D
[0:7]
EN
Q[0:7]
RE
GE
8D
[0:7]
EN
Q[0:7]
RE
GE
8D
[0:7]
EN
Q[0:7]
RE
GE
8D
[0:7]
EN
Q[0:7]
RE
GE
8D
[0:7]
EN
Q[0:7]
Sunnyvale, C
A 94089
1277 Orleans D
rive
Corporation
QuickLogic
TIM
E1
1999-03-1709:51:58
TIM
E1
.
GN
D[0:6],G
ND
[0:4],GN
D[0:3],G
ND
,GN
D,G
ND
,GN
D[0:4],G
ND
,GN
D,G
ND
[0:1]C
K2
GN
DG
ND
GN
DS
I3[7]C
CLR
SI3[0]
SO
1[1]F
OU
TC
50MI
I50MH
ZC
50MS
O1[0]
C50M
LL10M
CL2M
CL1M
CG
ND
,GN
D,G
ND
,GN
DG
ND
,GN
D,G
ND
,GN
DG
ND
,GN
D,G
ND
,GN
DC
NT
[0:27]LO
AD
2S
EC
1
LOA
D2
LOA
D2
CN
T[0]
CN
T[25]
SE
C2
CN
T[1]
CN
T[2]
AD
[0]A
[0]F
U1[2]
FU
2[2]F
U3[0]
CN
T[3]
CN
T[4]
SI4[0]
OU
T40
FU
1[1]F
U2[0:3]
CN
T[5]
AD
[1]A
[1]F
U1[0:3]
FU
3[0:3]C
NT
[6]C
10MC
CN
T[12]
GN
DC
NT
[13]S
I4[1]O
UT
41LO
AD
0C
NT
[14]A
D[2]
A[2]
CN
T[15]
SI4[4]
CN
T[17]
CO
MP
0C
OM
O0
GN
D,G
ND
,GN
D,G
ND
SI4[3]
CN
T[19]
AD
[3]A
[3]C
NT
[20]F
U5[0]
CN
T[21]
CO
MP
1C
NT
[22]G
ND
FU
5[0:3]C
OM
O1
C50M
IC
NT
[23]A
D[4]
A[4]
CN
T[25]
CO
MP
2C
OM
O2
AD
[5]A
[5]C
NT
[0]C
NT
B[0]
SI3[1]
A[0]
AD
[6]A
[6]C
NT
[1]C
NT
B[1]
CO
MP
3C
OM
O3
A[0:6]
C50M
TR
1S
O1[1]
CN
T[2]
CN
TB
[2]
GP
SS
YIN
SO
1[5]B
U1[0:7]
CO
MP
4C
OM
O4
C50M
CN
T[3]
CN
TB
[3]B
U2[0:7]
TB
U1[0:7]
SI3[5]
SO
1[0]S
O1[1]
SO
1[6]C
NT
[4]C
NT
B[4]
SO
1[2]IN
T1
SI3[2]
SO
1[3]A
[0]C
NT
[5]C
NT
B[5]
SO
1[4]T
IME
AI
TIM
EA
I1
C50M
CN
T[6]
CN
TB
[6]T
R2
SO
1[2]
BU
3[0:7]C
NT
[7]C
NT
B[7]
C50M
TB
U2[0:7]
SI3[6]
CO
MP
S7
BU
4[0:7]C
NT
[0:15]C
NT
B[0:15]
SI3[6]
CN
T[8]
CN
TB
[8]S
O1[7]
IOR
SI3[3]
CN
T[9]
CN
TB
[9]O
D[0]
IOD
[0]A
[0]ID
[0]T
IME
BI
TIM
EB
I1C
NT
[10]C
NT
B[10]
C50M
CN
TB
[8:15]C
NT
B[0:7]
TR
3S
O1[3]
IOR
CN
T[11]
CN
TB
[11]O
D[1]
IOD
[1]B
U5[0:7]
ID[1]
C50M
TB
U3[0:7]
BU
6[0:7]C
NT
[12]C
NT
B[12]
IOR
SA
4S
A2
SA
3C
NT
[13]C
NT
B[13]
OD
[2]IO
D[2]
IOW
IOW
IOW
ID[2]
SI4[0:7]
CO
MP
S[0:7]
SI3[0:7]
CO
MP
S[6]
CN
T[14]
CN
TB
[14]C
OM
PS
[5]ID
[0:7]ID
[0:7]IO
RC
NT
[15]C
NT
B[15]
OD
[3]IO
D[3]
CO
MP
S[1]
CO
MP
1ID
[3]S
A1
SA
0IO
WIO
WC
OM
PS
[6]IO
RA
D[7]
A[7]
A[12:18]
CO
MP
S[5]
OD
[4]IO
D[4]
ID[4]
CO
MP
S[0]
CO
MP
S[2]
CO
MP
2C
OM
PB
2[0:7]C
OM
PB
1[0:7]A
D[12]
A[12]
IOR
CN
T[8:15]
CN
T[0:7]
OD
[5]IO
D[5]
CO
MP
S[6]
A[2]
ID[5]
CO
MP
S[5]
A[1]
AD
[13]A
[13]C
50MO
D1[0:7]
AD
[16]A
[16]C
OM
PO
UT
TB
U1[0:7]
IOR
CO
MP
S[3]
CO
MP
3T
BU
2[0:7]O
D[6]
IOD
[6]T
BU
3[0:7]ID
[6]C
OM
P0
AD
[14]A
[14]S
O1[0:7]
AD
[17]A
[17]S
I3[4]C
OM
PS
[6]S
O1[4]
CO
MP
S[5]
IOR
OD
[7]IO
D[7]
AD
[15]A
[15]A
D[18]
A[18]
ID[7]
CO
MP
S[4]
CO
MP
4
1, 5, 10, 50 MC
Cnt. seq:
00000001 = 0000001
00000000 = 0000000
49999999 = 2F
AF
07F49999998 =
2FA
F07E
F7FAF2

B-3
1 2 3 4 5 6 7 8
1 2 3 4 5 6 7 8
A
B
C
D
A
B
C
D
HDPAD
I_567
23
GPSC32
CLREN
Q[0:31]
GPSC32
CLREN
Q[0:31]
DFFP
I_341
D
PRE
QDFFP
I_343
D
PRE
Q
DFFP
I_342
D
PRE
QDFFP
I_344
D
PRE
Q
CKPAD
I_571
24
MUX4x0
S0S1
GPSM2x 8MUX0[0:7]
MUX1[0:7]
SEL
MUXO[0:7]
XOR2i0
GPSMU4X8
INBU1[0:7]INBU2[0:7]INBU3[0:7]INBU4[0:7]
S0S1
OUTB[0:7]
GPSMU4X8
INBU1[0:7]INBU2[0:7]INBU3[0:7]INBU4[0:7]
S0S1
OUTB[0:7]
GPSMU4X8
INBU1[0:7]INBU2[0:7]INBU3[0:7]INBU4[0:7]
S0S1
OUTB[0:7]
GPSMU4X8
INBU1[0:7]INBU2[0:7]INBU3[0:7]INBU4[0:7]
S0S1
OUTB[0:7]
BUFF
BUFF
BUFF
BUFF
BUFF
BUFF
BUFF
BUFF
BUFF
BUFF
BUFF
OUTPAD
I_355
39
INPAD
I_572
28
REGE8D[0:7]
EN
Q[0:7]
REGE8D[0:7]
EN
Q[0:7]
REGE8D[0:7]
EN
Q[0:7]
Sunnyvale, CA 940891277 Orleans Drive
CorporationQuickLogic
TIME1
1999-03-17 09:51:58
TIME1
.
FREIN1 SI5[7]SI5[6]
TIMEAI1TIMEBI1
FREOUT
FREIN2
A[2]FREIN
FRECK
A[1]SI5[0] SI5[1] OD2[0:7]
FCNT[0:7]FCNT[8:15]
LOAD2 FCNT[16:23]SI5[2] FCNTEN1 FCNTEN2 FCNT[0:31] FCNT[24:31]
A[2]
A[1]SI5[1] OD3[0:7]
DCNT[0:7]C50M DCNT[8:15]
C50M DCNT[16:23]DCNT[0:31]
SI5[3]DCNTEN1 DCNTEN2 DCNTEN3
DCNT[24:27],FCNTEN1,FCNTEN2,DCNTEN1,DCNTEN3
A[4]
SA5IOW A[3]
SI5[0:7] OD[0:7]OD1[0:7]OD2[0:7]ID[0:7]OD3[0:7]OD4[0:7]
A[2]
SO1[1]A[0]
A[1]OD4[0:7]
C50M TBU1[0:7]CNT[16:23] BU23[0:7]
TBU20[0:7]
BU23[0:7]SO1[1]
TBU20[0:7]BU24[0:7]
C50MCNT[24:27],CNTB[12:15] BU24[0:7]
FLASHR,WDIR,WDIE,BUSY,GND,GND,GND,GND
GND[0:7]
e x t. wi re

B-4
1 2 3 4 5 6 7 8
1 2 3 4 5 6 7 8
A
B
C
D
A
B
C
D
AND3i2
I_620
ADSAGPS1
A[0:4]
ES[0:23]
AND4i3
AND4i3
AND4i2
AND4i2
DFFC
I_493CLR
D Q
TRIPAD
I_494
13
AND3i1
AND3i1
AND3i1
DLAEC
CLRD
ENG
Q
DLAC
CLRD
G
Q
DLAC
CLRD
G
Q
DLAC
CLRD
G
Q
OR2i0
OR2i0
OUTiPAD
I_367
1
OUTiPAD
I_366
77
OUTiPAD
I_365
68
OUTiPAD
I_419
62
OUTiPAD
I_396
50
INV
INV
INV
INV
INV
AND5i0
BUFF
BUFF
BUFF
BUFF
BUFF
BUFF
BUFF
BUFF
BUFF
BUFF
BUFF
AND2i1
AND2i1
DFF
I_520
D Q
AND2i0
AND2i0
AND2i0
OUTPAD
I_399
45
OUTPAD
I_401
48
OUTPAD
I_376
74
OUTPAD
I_550
26
OUTPAD
I_397
49
OUTPAD
I_398
47
INPAD
I_392
18
INPAD
I_496
20
INPAD
I_420
12
INPAD
I_377
17
INPAD
I_378
16
Sunnyvale, CA 940891277 Orleans Drive
CorporationQuickLogic
TIME1
1999-03-17 09:51:58
TIME1
.
A[14] CS1A[15]
A[14] CS2A[15]
A[15] CS3A[12]
IOWW WRCOMSA[6]
MEIA[12]A[13]A[14]A[15]
IOWWIOE41
ID[3]FLASHR
FLASH
RESETCLR1
SA[16]
S[0:5],SA[6:23]
ID[0] FSELDSA[0:4] S[0] SA0
RD S[1] SA1 SLEEPDS
ID[1]
TIM
E S[2]SA2
CSDSIORIORD S[3]
SA3 A1[2]A[4]A[3]S[4]
SA4 ID[2] LOADDSIOW A[5]
IOWRS[5]
SA5
WR RESETDSSA[17]
IOWW
A[0] A1[0]IOWW WRDS
IOE41A1[0]A1[1] IOWW
A[1] A1[1] A1[2] ID[0]WDIE
A[3]IOE
A[6]WDI
A[4] ID[1] WDIRA[5]
A[2] A1[2]A[7]
IOE1
ADENA[3]
ADDRESS DECODER
ARV
EPROM
FEPROM
RAM
48-4F
SA20-SA27
WATCHDOG
DIR
EC
T D
IGIT
AL
SY
NTH
ES
IS

B-5
1 2 3 4 5 6 7 8
1 2 3 4 5 6 7 8
A
B
C
D
A
B
C
D
AND5i2
AND4i3
AND4i2
DFFEPC
I_526
CLR
D
EN
PRE
Q
AND3i1
AND4i1
OUTiPAD
I_471
70
OUTiPAD
I_528
44
OUTiPAD
I_470
69
OUTiPAD
I_473
71
BUFF
BUFF
BUFF
BUFF
BUFF
BUFF
BUFF
AND2i0
AND2i0
OUTPAD
I_530
43
OUTPAD
I_467
73
OUTPAD
I_468
72
INPAD
I_531
42
Sunnyvale, CA 940891277 Orleans Dr ive
CorporationQuickLogic
TIME1
1999-03-17 09:51:58
TIME1
.
CLR1 CLRDAC
A[3]IOWW
A1[2] DACA[4] LBDAC
A1[0]A[5]
A1[1]
HBDAC
A0D AC
WRDAC
D[0:7]
A1[1] GNDID[0]
D[0]A1[2] CLR1
A[3]ADC
ID[1]D[1]
A[4] IOWWA[5] ID[0] HBENADC
ID[2] D[2]
ID[3] D[3]
RDADCID[4]
D[4]RD
ID[5]D[5]
ID[6]D[6]
BUSYADC BUSY
MIN 80ns
SA12-SA13
SA8-SA11
INERFACE D/A AND A/D CONVERTER
ARV

C-1
Appendix C
Description of I/O ports
Contents C-1
Analogue inputs C-2
Analogue outputs C-2
Serial I/O C-2
Power input C-2
LED C-2

C-2
The connections between PC, sonar and themicroprocessor are controlled by the microprocessor.There is no direct path to the GPS receiver, which isaccessed via the microprocessor.
Figure 2.4 The RS232 connections
Analogue inputs
Time A Used for start signal in Time A �Time B measurement
Time B Used for stop signal in Time A �Time B measurement
Frequency in 1 Input for frequency measurements
Frequency in 2 Input for frequency measurements
Frequency in Input for frequency measurements
GPS antenna Input from the active GPS antenna
Microphone input Input for condenser microphone.Low pass filtered at 3.3 kHz.Maximum sampling frequency 70kHz.
All inputs have BNC-connectors, except the GPSantenna which has a TNC-connector and themicrophone input which has an 3.5 mm earphoneconnector
Analogue outputs
50 MHz 50 MHz square wave
1 second pulse Short pulse
1 second pulse Long pulse
Com1 � Com4 These are four outputs on whichcan be generated pulses at arbitrarypredefined time points.
Com0 On this output is generated a pulseat the same time as the pulse at oneof the outputs Com1 � Com4.
Freout To this output is multiplexed oneof the inputs Frequency1,Frequency2, TimeA or TimeB.
Fout This output can be programmed togive 1, 5 , 10 or 50 MHz squarewave.
DDS out 1 Linear (sine wave) output fromDDS chip.
DDS out 2 Square wave output from DDSchip.
All these outputs have BNC-connectors. The level ofthe outputs can be chosen within 3 - 12 V.
Serial I/O
There are three 9-pin Dsub connectors.
DGPS Input for differential GPSmessage. Unidirectional.
PC For communication with PC host.
Sonar This connector is for communica-tion with the sonar transmitter thatwe are going to use in the bistaticexperiments.
Power input
220 V AC
12 V DC
LED
The front panel of the clock has three LEDs that canbe programmed to show status.
micro-processor GPS receiver
PC
Sonar
DGPS
1 secsync

![GP-2106 [SiRF Star IV GPS Module With Antenna]](https://static.fdocuments.net/doc/165x107/577cda7d1a28ab9e78a5bf39/gp-2106-sirf-star-iv-gps-module-with-antenna.jpg)
















