
A Finite Strain Plastic-damage Model for High Velocity...
42
A Finite Strain Plastic-damage Model for High Velocity Impact using Combined Viscosity and Gradient Localization Limiters: Part I – Theoretical Formulation RASHID K. ABU AL-RUB AND GEORGE Z. VOYIADJIS* Department of Civil and Environmental Engineering Louisiana State University Baton Rouge, LA 70803, USA ABSTRACT: During dynamic loading processes, large inelastic deformation associated with high strain rates leads, for a broad class of ductile metals, to degradation and failure by strain localization. However, as soon as material failure dominates a deformation process, the material increasingly displays strain softening and the finite element computations are considerably affected by the mesh size and alignment. This gives rise to a non-physical description of the localized regions. This article presents a theoretical framework to solve this problem with the aid of nonlocal gradient-enhanced theory coupled to viscoinelasticity. Constitutive equations for anisotropic thermoviscodamage (rate-dependent damage) mechanism coupled with thermo-hypoelasto-viscoplastic deformation are developed in this work within the framework of thermodynamic laws, nonlinear continuum mechanics, and nonlocal continua. Explicit and implicit microstructural length-scale measures, which preserve the well-posedness of the differential equations, are introduced through the use of the viscosity and gradient localization limiters. The gradient- enhanced theory that incorporates macroscale interstate variables and their high- order gradients is developed here to describe the change in the internal structure and to investigate the size effect of statistical inhomogeneity of the evolution related plasticity and damage. The gradients are introduced in the hardening internal state variables and are considered dependent on their local counterparts. The derived microdamage constitutive model is destined to be applied in the context of high velocity impact and penetration damage mechanics. The theoretical framework presented in this article can be considered as a feasible thermodynamic approach that enables to derive various gradient (visco) plasticity/(visco) damage theories International Journal of DAMAGE MECHANICS, Vol. 15—October 2006 293 1056-7895/06/04 0293–42 $10.00/0 DOI: 10.1177/1056789506058046 ß 2006 SAGE Publications *Author to whom correspondence should be addressed. E-mail: [email protected]
Transcript of A Finite Strain Plastic-damage Model for High Velocity...
A Finite Strain Plastic-damage Modelfor High Velocity Impact usingCombined Viscosity and Gradient
Localization Limiters:Part I – Theoretical Formulation
RASHID K. ABU AL-RUB AND GEORGE Z. VOYIADJIS*
Department of Civil and Environmental EngineeringLouisiana State University
Baton Rouge, LA 70803, USA
ABSTRACT: During dynamic loading processes, large inelastic deformationassociated with high strain rates leads, for a broad class of ductile metals,to degradation and failure by strain localization. However, as soon as materialfailure dominates a deformation process, the material increasingly displays strainsoftening and the finite element computations are considerably affected by the meshsize and alignment. This gives rise to a non-physical description of the localizedregions. This article presents a theoretical framework to solve this problem with theaid of nonlocal gradient-enhanced theory coupled to viscoinelasticity. Constitutiveequations for anisotropic thermoviscodamage (rate-dependent damage) mechanismcoupled with thermo-hypoelasto-viscoplastic deformation are developed in this workwithin the framework of thermodynamic laws, nonlinear continuum mechanics,and nonlocal continua. Explicit and implicit microstructural length-scale measures,which preserve the well-posedness of the differential equations, are introducedthrough the use of the viscosity and gradient localization limiters. The gradient-enhanced theory that incorporates macroscale interstate variables and their high-order gradients is developed here to describe the change in the internal structure andto investigate the size effect of statistical inhomogeneity of the evolution relatedplasticity and damage. The gradients are introduced in the hardening internal statevariables and are considered dependent on their local counterparts. The derivedmicrodamage constitutive model is destined to be applied in the context of highvelocity impact and penetration damage mechanics. The theoretical frameworkpresented in this article can be considered as a feasible thermodynamic approachthat enables to derive various gradient (visco) plasticity/(visco) damage theories
International Journal of DAMAGE MECHANICS, Vol. 15—October 2006 293
1056-7895/06/04 0293–42 $10.00/0 DOI: 10.1177/1056789506058046� 2006 SAGE Publications
*Author to whom correspondence should be addressed. E-mail: [email protected]
by introducing simplifying assumptions. Besides the clear physical significance ofthe proposed framework, it also defines a very convenient context for the efficientnumerical integration of the resulting constitutive equations. This aspect is exploredin Part II of this work and the application of the framework proposed herein to thenumerical simulation of high velocity impacts on metal plates.
KEY WORDS: nonlocal theory, anisotropic damage, viscoplasticity, viscodamage,gradient theory, impact damage.
INTRODUCTION
STRUCTURES ARE GENERALLY subjected to impact loading, which oftenbrings failures and serious damage in their components. The September
11th attack demonstrated the response of tall steel buildings to the impactof a fast moving airplane. Millions of terrified spectators around theworld watched as the Boeing 767moving with a cruising speed of 240m/s(500mph), hit the exterior wall of the World Trade Center, cut through it,and disappeared in the smoky cavity. How was it possible that the relativelyweak, light, and airy airframe damaged the apparently heavy lattice of highstrength steel columns?
Under high-strain rate loading a type of shear banding occurs due toa rapid local heating resulting from the intense inelastic shear deformationsand propagation of shock waves. The presence of material or geometricalimperfections or the evolution of heterogeneous distribution of micro-defects may trigger the formation of shear bands (Zbib and Aifantis, 1988).Further, the evolution of elastic-viscoinelastic waves due to impact loadingmay lead to the localization phenomena in solids (Glema et al., 2000).The failure of the structure can, therefore, occur as a result of a strainlocalization attributed to an inelastic instability implied by microdamage,wave reflections, and/or thermal softening during inelastic flow and damagegrowth processes.
Many researchers have investigated the material failure mechanismduring high velocity impact conditions with the ultimate goal of designingbetter resistance for different structures (e.g., Johnson and Cook, 1985;Curran et al., 1987; Steinberg and Lund, 1989; Bammann et al., 1990;Zukas, 1990; Zhou et al., 1996; Sierakowski, 1997; Hou et al., 2000;Naboulsi and Palazotto, 2000; Borvik et al., 2002; Li et al., 2002).Moreover, many constitutive models that consider elastic-viscoinelasticdeformation at very high strain-rates have been proposed and employedto model high velocity impact phenomena (e.g., Steinberg et al., 1980;Johnson and Cook, 1985; Zerilli and Armstrong, 1987; Steinberg and Lund,1989; Bammann et al., 1990; Eftis et al., 2003; Voyiadjis and Abed, 2005).
294 R. K. ABU AL-RUB AND G. Z. VOYIADJIS

It is noted that none of these constitutive models address the problem ofdescribing high shock compression and subsequent material degradationand failure in which the latter is expressed as an evolving microflaw havinga damage rate determined from micromechanical analysis. Moreover,these models cannot consider the actual sizes, shapes, and orientations ofthe individual microvoids and microcracks, which may have a predominantinfluence on the mechanical response of the material. This work recognizesthe need for a micromechanical damage model that takes into account themicroscopic interactions between material points (i.e., takes into account theinfluence of an internal state variable at a point on its neighborhood) in thesimulation of metal impact problems.
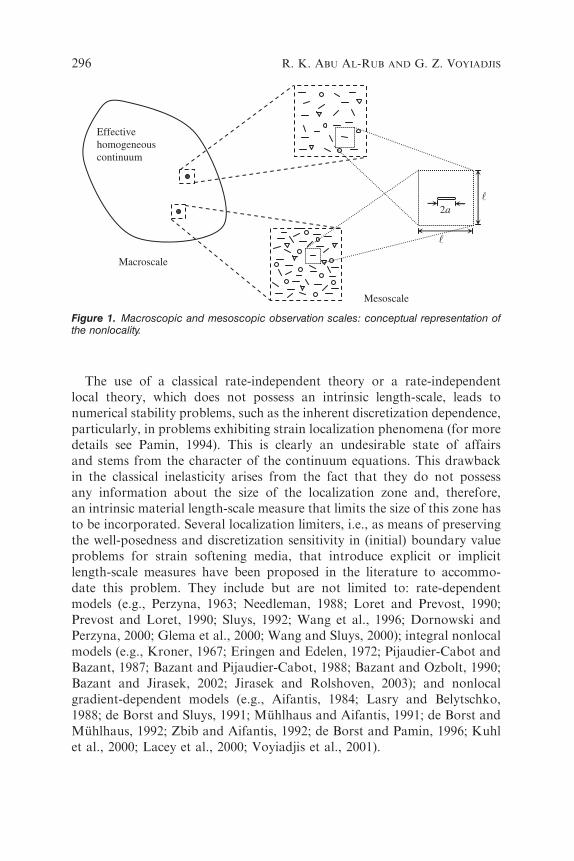
The inelastic material behavior of engineering materials may be attributedto two distinct material mechanical processes: plasticity and/or damage.Plasticity or viscoplasticity (rate-dependent plasticity) theories, by themselves,are insufficient for modeling the deformation of metallic materials sinceboth damage (microcracks and microvoids) and plasticity (dislocations) arepresent in their microstructure. A constitutive model should address equallythe two distinct physical modes of irreversible changes and should satisfythe basic postulates of mechanics and thermodynamics. A multidissipa-tive model that accounts for both the material plasticity and damage isnecessary (e.g., Chow and Wang, 1987; Murakami et al., 1998; Abu Al-Ruband Voyiadjis, 2003). As the plasticity or viscoplasticity and damageor viscodamage (rate-dependent damage or creep) defects localize overnarrow regions of the continuum, the characteristic length-scale governingthe variations of those defects and their average interactions over multiplelength-scales falls far below the scale of the local state variables of(visco) plasticity and (visco) damage used to describe the response of thecontinuum. This leads to the loss of the statistical homogeneity inthe representative volume element (RVE); in such a way that all themacroscopic response functions of interest (e.g., the Helmholtz free energy,�; the dissipation potential, �; the Cauchy stress tensor, r; the small straintensor, e; the stiffness tensor; C, etc.) are sensitive to the distribution, size,and orientation of the mesostructural and macrostructural defects withinthe RVE (see Figure 1). For example, dislocation interactions are observedon a mesolevel with a length-scale of 0.1–10 mm affecting strongly thematerial behavior on the macrolevel with a length-scale of �100 mm(Abu Al-Rub and Voyiadjis, 2004). Therefore, there is a need for modelsthat abandon the assumption that the stress at a given point is uniquelydetermined by the history of strain and temperature at this point only(locality). This raises the need for incorporation of material length-scalemeasures in the constitutive description of the material mechanicalbehavior.
Finite Strain Plastic-damage Model for High Velocity Impact – Part I 295
The use of a classical rate-independent theory or a rate-independentlocal theory, which does not possess an intrinsic length-scale, leads tonumerical stability problems, such as the inherent discretization dependence,particularly, in problems exhibiting strain localization phenomena (for moredetails see Pamin, 1994). This is clearly an undesirable state of affairsand stems from the character of the continuum equations. This drawbackin the classical inelasticity arises from the fact that they do not possessany information about the size of the localization zone and, therefore,an intrinsic material length-scale measure that limits the size of this zone hasto be incorporated. Several localization limiters, i.e., as means of preservingthe well-posedness and discretization sensitivity in (initial) boundary valueproblems for strain softening media, that introduce explicit or implicitlength-scale measures have been proposed in the literature to accommo-date this problem. They include but are not limited to: rate-dependentmodels (e.g., Perzyna, 1963; Needleman, 1988; Loret and Prevost, 1990;Prevost and Loret, 1990; Sluys, 1992; Wang et al., 1996; Dornowski andPerzyna, 2000; Glema et al., 2000; Wang and Sluys, 2000); integral nonlocalmodels (e.g., Kroner, 1967; Eringen and Edelen, 1972; Pijaudier-Cabot andBazant, 1987; Bazant and Pijaudier-Cabot, 1988; Bazant and Ozbolt, 1990;Bazant and Jirasek, 2002; Jirasek and Rolshoven, 2003); and nonlocalgradient-dependent models (e.g., Aifantis, 1984; Lasry and Belytschko,1988; de Borst and Sluys, 1991; Muhlhaus and Aifantis, 1991; de Borst andMuhlhaus, 1992; Zbib and Aifantis, 1992; de Borst and Pamin, 1996; Kuhlet al., 2000; Lacey et al., 2000; Voyiadjis et al., 2001).
Effective homogeneouscontinuum
Macroscale
2a
Mesoscale
Figure 1. Macroscopic and mesoscopic observation scales: conceptual representation ofthe nonlocality.
296 R. K. ABU AL-RUB AND G. Z. VOYIADJIS
The incorporation of viscosity (rate-dependency) allows the spatialdifference operator in the governing equations to retain its ellipticity andthe initial value problem (the Cauchy problem) is well-posed. This is becauseviscosity introduces implicitly a length-scale measure that limits localizationin dynamic or quasi-static problems: ‘ ¼ c�v where c denotes the velocity ofthe propagation of the elastic waves in the material and �v is the relaxationtime for mechanical disturbances, which is directly related to the viscosity ofthe material (Loret and Prevost, 1990; Prevost and Loret, 1990). Sluys(1992) has also demonstrated that this viscosity length-scale effect can berelated to the spatial attenuation of waves that have real wave speeds in thesoftening regime. Consequently, any rate dependence in the constitutive lawcombined with inertial effects introduces an implicit length-scale that givesthe possibility to obtain mesh-insensitive results (e.g., Needleman, 1988;Loret and Prevost, 1990; Prevost and Loret, 1990; Wang et al., 1996;Dornowski and Perzyna, 2000; Glema et al., 2000; Wang and Sluys, 2000).The rate-independent inelastic response is obtained as a limit case whenthe relaxation time is equal to zero, i.e., �v¼ 0; hence, the theory ofviscoinelasticity offers the localization limiter (or regularization procedure)for the solution of dynamic initial boundary value problems. It isimperative, however, to emphasize that rate-dependent theories are neithernecessary nor sufficient in taking into account the microscopic interactionswith other material points in the vicinity of that point. In other words,viscosity is not necessarily successful in capturing the effect of size andspacing of microdefects on the overall response of the material (nonlocality).The nonlocal theory can thus be used to remedy this situation.
The integral nonlocal theory involves an infinitely extended zoneof nonlocal action that may be approximated by the truncated Taylorseries expansion, giving rise to the so-called gradient-dependent theory.The gradient approach typically retains in the constitutive equations termsof high-order gradients with coefficients representing length-scale measuresof the deformation microstructure. Aifantis (1984) was one of the first tostudy the gradient regularization in solid mechanics. Other researchershave contributed substantially to the gradient approach with emphasis onnumerical aspects of the theory and its implementation in finite elementcodes: Lasry and Belytschko (1988), Aifantis (1992), Zbib and Aifantis(1992), and de Borst and coworkers (e.g., de Borst and Sluys, 1991; de Borstand Muhlhaus, 1992; de Borst et al., 1993; Pamin, 1994; de Borst andPamin, 1996; Peerlings et al., 1996; Fleck and Hutchinson, 1997; de Borstet al., 1999). In addition, the recent works of Wang et al. (1998), Aifantiset al. (1999), Bammann et al. (1999), Ganghoffer (1999), Gao et al. (1999),Acharya and Bassani (2000), Askes et al. (2000), Geers et al. (2000),Kuhl et al. (2000), Oka et al. (2000), Svedberg and Runesson (2000), Chen
Finite Strain Plastic-damage Model for High Velocity Impact – Part I 297

and Wang (2002), and Di Prisco (2002) should be included here. Gradientthermodynamic models were also introduced by Fremond and Nedjar(1996), Gurtin (2002, 2003), and Voyiadjis and his coworkers (e.g.,Voyiadjis et al., 2001, 2003, 2004). Moreover, reference is made tointeresting contributions on the physical origin of the length-scale ingradient plasticity theories made by Voyiadjis and Abu Al-Rub (2004) andAbu Al-Rub and Voyiadjis (2004).
Explicit length-scale measures via nonlocal gradient-dependent theoryand/or implicit length-scale measures via viscoinelasticity theory can thusbe considered either as regularization parameters or localization limiters(computational point of view), or as micromechanical parameters to bedetermined from observed shear-band widths or size effect experiments(physical point of view).
The objective of this article is to present a micromechanically basedconstitutive model for the modeling of heterogeneous media that assesses astrong coupling between (visco) plasticity and (visco) damage for highvelocity impact related problems while considering the discontinuities on themacroscale level. The essential aspects of interest here can all be examinedwithin the context of: (1) finite deformation kinematics; (2) rapid timevariations in temperature, strain, strain rate, and other field variables;(3) equation of state; (4) thermal and damage softening; (5) strongviscoplasticity and viscodamage coupling; (6) long range microstructuralinteractions through the use of the nonlocal continua; and (7) numericalstability through the use of regularization approaches (i.e., using viscosityand gradient localization limiters). This can be effectively characterizedthrough a thermodynamic framework for the development of a nonlinearcontinuum hypoelasto-thermo-viscoplastic and thermoviscodamage basedfailure model. The constitutive equations are derived from the first andsecond laws of thermodynamics, the expression of the Helmholtz freeenergy, the Clausius–Duhem inequality, the maximum dissipation principle,the generalized normality rule, and the balance heat equation. All thethermodynamic equations are expressed in the spatial configuration. Theevolution laws are implemented in a finite deformation framework based onthe additive decomposition of the spatial rate of deformation into elastic,viscoplastic, and viscodamage components. Furthermore, the constitutiveequations for the damaged material are written according to the principleof strain energy equivalence between the virgin material and the damagedmaterial. Extension of this concept to nonlocal continua is also discussed.In addition, the nonlocality is introduced here through the viscoplasticityand viscodamage hardening variables. The second-order gradients in thegradient-dependent theory are mainly considered in this study; while thefirst-order gradients are disregarded since the isotropic nonlocal influence
298 R. K. ABU AL-RUB AND G. Z. VOYIADJIS

is assumed. The local viscoplasticity and viscodamage hardening variablesand their corresponding second-order gradients are considered mathe-matically dependent on each other, but each gives different physicalinterpretations that lead to different evolution equations allowing us tocomputationally introduce independently the influence of the macroscaleand mesoscale levels.
The developments in this first part of this work are focused on theconsideration of nonlocal plastic-damage modeling in the finite deformationrange for rate- and temperature-dependent materials. Presented in Part IIare the computational aspects and numerical algorithms for the integrationof the resulting constitutive equations with applications to impact relatedproblems.
The next section introduces the nonlocal concepts, extension of the non-local concept to anisotropic damage, and a completely consistent thermo-dynamic framework for the hypoelasto-viscoplastic and viscodamagematerial behavior with rate, thermal, and pressure effects for impact relatedproblems using the nonlocal gradient-dependent theory. The rate-type ofstress–strain constitutive relation is derived, the heat balance equation isformulated and a failure criterion is proposed. All these are presented in thesubsequent sections. Conclusions are also provided.
NONLOCAL CONSTITUTIVE MODELING
FOR DYNAMIC LOADING
Weak Nonlocal Formulation using the Gradient Approach
Materials with a microstructure are nonlocal in behavior due to theinterplay of characteristic lengths including sizes or spacing of defectclusters, grain sizes, fiber spacing, etc. As traditional continuum mechanicsdoes not contain characteristic lengths, the use of the nonlocal concept isrequired to introduce a microstructure characteristic length and to introducelong-range microstructural interactions where the stress response at amaterial point is assumed to depend on the state of its neighborhoodin addition to the state of the material point itself. In this article, the useof the nonlocal continuum theory is made. Integral-type nonlocal modelsreplace one or more variables (typically, state variables) by their nonlocalcounterparts obtained by weighted averaging over a spatial neighborhood ofeach point under consideration. If A(x) is some ‘local’ field in a domain V,the corresponding nonlocal field, A
_
ðxÞ, is defined as follows:
A_
xð Þ ¼1
V
ZV
h nð ÞA xþ nð Þ dV with V nð Þ ¼
ZV
h nk kð Þ dV ð1Þ
Finite Strain Plastic-damage Model for High Velocity Impact – Part I 299

The superimposed hat denotes the spatial nonlocal operator, and h(n)is a nonlocal weight function that decays smoothly with distance knk. InEquation (1) n is the vector pointing to the infinitesimal volume dV. Theweight function is often taken as the Gaussian error distribution function
h nk kð Þ ¼ exp�ndim nk k2
2‘2
� �ð2Þ
where ‘ is called the internal length of the nonlocal continuum, which setsthe averaging volume or the size of inhomogeneity, and ndim is the spatialdimension of the problem (1, 2, or 3). Theoretically, the Gauss function inEquation (2) has an unbound support, i.e., its interaction length is & ! 1.In practical calculations, the weight function is truncated at the distancewhere its value becomes negligible.
Gradient formulations are found when the local field A(xþ n) inEquation (1) is expanded in a Taylor series around x, such that:
A xþ nð Þ ¼ A xð Þ þ rA xð Þnþ1
2!r2A xð Þnnþ
1
3!rr2A xð Þnnn
þ1
4!r2r2A xð Þnnnn . . . ð3Þ
where r is the first-order gradient operator and r2 denotes the second-ordergradient (Laplacian) operator. The above Taylor series expansion of thelocal variable A is then substituted in the nonlocal spatial averaging,Equation (1). Since an infinite isotropic body is considered here, whenconducting the integration of Equation (1) with infinite integrationintervals, all of the odd terms in Equation (3) (i.e., the second and fourthterms on the right-hand side of Equation (3)) vanish. Consequently, A
_
reduces to:
A_
¼1
V
ZV
h nð ÞA xð Þ dVþ1
2!V
ZV
h nð Þr2A xð Þnn dV ð4Þ
where the terms of fourth- and higher-order have been neglected.Substituting Equation (2) into Equation (4) and integrating from �1
to 1 leads to
A_
¼ Aþ1
2‘2r2A ð5Þ
where ‘ is the internal material length-scale, which weights each componentof the gradient term identically. The role of the material length-scale in
300 R. K. ABU AL-RUB AND G. Z. VOYIADJIS

solving the impact damage problem and in preserving the objectivity of thecontinuum modeling and numerical simulation of the localization problemis the main concern of this article.
If a more general tensorial character for the nonlocal weight function notnecessarily confined to the expressions in Equations (2) is assumed, adifferent weighting of the individual coefficients is obtained. In other words,replacing the traditional averaging operator in Equation (1) by a morecomplicated implicit scheme, which takes into account not only thedistance knk, but also the relative orientation of the principal strain axesat x is suggested. This modification can lead to an improved performance,especially when anisotropic influence needs to be simulated. In this work,attention to standard nonlocal averaging of Equation (1) is restricted.
An attempt is made here to account for the effect of non-uniformdistribution of microdefects on the overall macroscale response by assumingthe thermoelastic Helmholtz free-energy density, �, to depend not onlyon the macroscopic response associated with the internal state variable A,but also on its macroscopic spatial second-order gradient (or Laplacian)r2A. This will be detailed in the subsequent sections of this article.
Nonlocal Effective Configuration
Continuum damage models based on the effective stress space(undamaged configuration) were introduced by Kachanov (1958) andlater by Rabotnov (1968) who were the first to introduce for the isotropiccase a one-dimensional variable, �, which may be interpreted as the effectivesurface density of microdamage per unit volume (Voyiadjis and Venson,1995), such that the effective Kirchhoff stress tensor, �ss, is expressed asfollows:
���ij ¼�ij
1� �ð6Þ
However, Equation (6) is a mathematical definition of the effective stressalthough it may be interpreted as the uniform (average) stress actingon an effective area of the material (Abu Al-Rub and Voyiadjis, 2003). Togive it a general physical meaning, it is necessary to use the correspondingdamage-free material (i.e., virgin material) in the mesoscale to represent the‘effective’ concept of Equation (6) for a macroscopically damaged material.Thus, a proper correlating hypothesis between two material scale levels canbe obtained using the nonlocal damage variable /
_
. It is then importantto emphasize that Kachanov’s definition given by Equation (6) can be
Finite Strain Plastic-damage Model for High Velocity Impact – Part I 301

generalized to a nonlocal one, for the case of isotropic damage and under ageneral state of stress, as follows:
���ij ¼�ij
1� /_ ð7Þ
where the possible approaches in interpreting the nonlocal quantity /_
willbe discussed thoroughly later in this article. However, it was shown byJu (1989) that two independent damage parameters are needed to describethis case adequately for local continuum.
To ensure a more general formulation of the principles of damagemechanics, the case of anisotropic damage will be assumed in this work(Chow and Wang, 1987; Voyiadjis and Kattan, 1992a, b). Therefore, theanisotropic phenomenon of the microdamage (i.e., microcracks andmicrovoids) distribution in the material is interpreted using a nonlocalsymmetric second-order damage tensor, /
_
.The linear elastic constitutive equations for the damaged material are
expressed by Equation (6). That is, the damaged material is modeled usingthe constitutive laws of the effective undamaged material in which theKirchhoff stress tensor, s, can be replaced by the effective stress tensor,�ss (Murakami and Ohno, 1981) as follows:
���ij ¼ M_
ikjl �kl ð8Þ
where M_
is the nonlocal fourth-order damage-effect tensor. The tensor M_
,which is then expressed in terms of /
_
, characterizes the notion of non-uniform distribution and interaction of microcracks and microvoids overmultiple length-scales at which first and second nearest neighbor effects ofnonlocal character are significant, similar to the homogenization theory.
Many different expressions for the local M have been proposed in theliterature in order to symmetrize the effective stress tensor, �ss. A comprehen-sive review of the most widely used expressions are presented by Voyiadjisand Park (1997). The following expression for M is adopted here for M
_
dueto its attractiveness in the mathematical formulation (Abu Al-Rub andVoyiadjis, 2003), such that:
M_
ikjl ¼ 2 �ik � �_
ik
� ��jl þ �ik �jl � �
_
jl
� �h i�1
ð9Þ
where /_
is the nonlocal damage variable whose evolution will be definedlater. Note that the fourth-order tensor M
_
exhibits the major symmetriesonly (i.e., M
_
ikjl ¼ M_
jlik).
302 R. K. ABU AL-RUB AND G. Z. VOYIADJIS

For finite strain problems and assuming small elastic strains (usuallyaccepted for metals and other materials subjected to high strain-rate loading),the additive decomposition of the total rate of deformation tensor, d, intoelastic part, d e, and viscoinelastic part, d vi is assumed, such that:
dij ¼ d eij þ d vi
ij ð10Þ
The elastic rate of deformation, d e, is the reversible part attributed toelastic distortions, microcracks closure, and microvoids contraction uponunloading (but not healing). On the other hand, the viscoinelastic rateof deformation, d vi, designates the irreversible part of the total strainattributed to viscoplastic distortions and viscodamage strains and ischaracterized by the lack of microcrack closure and microvoid contractionwhich cause permanent deformations. The lack of microcrack closure andmicrovoid contraction can be due to the constraints set up by the interactingmicrocracks, microvoids, dislocation movements, and external/internalinterfaces (Abu Al-Rub and Voyiadjis, 2003). Therefore, the viscoinelasticpart of deformation can be further decomposed as follows:
d viij ¼ d vp
ij þ d vdij ð11Þ
where d vp is the viscoplastic rate of deformation and d vd is the viscodamagerate of deformation. Analogous to the additive decomposition inEquations (10) and (11), the spatial total strain tensor, e, can be alsodecomposed as follows:
eeij ¼ eeij þ eviij ¼ eeij þ evpij þ evdij ð12Þ
To derive the transformation relations between the damaged and thehypothetical undamaged (effective) states of the material, the elastic energyequivalence hypothesis (Sidoroff, 1980) is utilized here. This hypothesisassumes that each of the elastic energy density in terms of effective andnominal stress and corresponding strain quantities must be equal, such thatwe express the effective elastic strain tensor, �eee, in terms of the elastic straintensor, ee, as follows:
�ee eij ¼ M_�1ikjl e
ekl ð13Þ
By using the elastic strain energy equivalence principle (Sidoroff, 1980),we can write the fourth-order tensor of the elastic-damage modulus,C, as follows:
Cijkl ¼ M_�1imjn
�CCmnpqM_�1pkql ð14Þ
Finite Strain Plastic-damage Model for High Velocity Impact – Part I 303

where
M_�1ikjl ¼
1
2�ik � �
_
ik
� ��jl þ �ik �jl � �
_
jl
� �h ið15Þ
and �CC is the undamaged fourth-order elastic modulus tensor. It isnoteworthy that the elastic-damage stiffness, C, exhibits the major andminor symmetries similar to the elastic stiffness, �CC.
Viscoplasticity and Damage Internal State Variables
In this work, thermal, elastic, viscoplastic (rate-dependent plasticity), andviscodamage (rate-dependent damage or creep damage) material behavioris considered. This means that the stress path, strain rate, temperature,pressure material dependence, and nonlinear material response areall considered. Thus, the dependent constitutive variables are functions ofthe elastic strain tensor, ee, the absolute temperature, T, the temperaturegradient vector, rT, the measure of volumetric deformation, J¼ det(F )with F is the deformation gradient, and nint – of phenomenologicalnonlocal internal state variables, @
_
k (k ¼ 1, . . . , nint; nint � 1). Hence, withinthe thermodynamic framework and considering the assumption ofinfinitesimal elastic strains, the Helmholtz free-energy density function canbe written as:
� ¼ ~�� eeij,T,riT, J;@_
k
� �ð16Þ
Since the main objective is to provide an adequate (i.e., physical)characterization of material defects (microcracks, microvoids, mobile andimmobile dislocation densities) in terms of size, orientation, distribution,spacing, interaction among defects, and so forth, a finite set of nonlocalinternal state variables, @
_
k, representing either a scalar or a tensorialvariable are assumed. These variables should include the nonlocal effectthrough the proposed gradient-dependent approach presented in theprevious sections. Therefore, motivated by the derived nonlocal equation,Equation (5), it is assumed that @
_
k is also decomposed into a local part, �n,and a Laplacian part, r2�n, such that:
@_
k ¼ ~@@k �n,r2�n
� �ð17Þ
where �n is a set of viscoplasticity and viscodamage hardening/softeninginternal state variables, and r2�n is the corresponding second-ordergradient (Laplacian) of �n. The state variables in this gradient-enhancedapproach are no longer independent; therefore, special care must be taken to
304 R. K. ABU AL-RUB AND G. Z. VOYIADJIS

properly account for state variable coupling between �n and r2�n (Laceyet al., 2000). Moreover, setting �n and r2�n as dependent internal statevariables allows us to computationally introduce the effects of the materialdefects in the mesoscale on the macroscale response, which gives differentphysical interpretations that guides us to different evolution equationsfor �n and r2�n. This postulate is motivated through the fact that certaininternal state variables such as the statistically stored dislocation (SSD)and geometrically necessary dislocation (GND) densities do not necessarilyhave the same evolution equations, but they are dependent on each other(Abu Al-Rub and Voyiadjis, 2004; Voyiadjis and Abu Al-Rub, 2004).
The sets of macro internal state variables, �n and r2�n, are postulated,respectively as:
�n ¼ ~��n p,�ij, r,Gij,�ij
� �ð18Þ
r2�n ¼ r2 ~��n r2p,r2�ij,r2r,r2Gij,r
2�ij
� �ð19Þ
where p denotes the accumulative viscoplastic strain and a denotes theflux of residual stress (backstress). The scalar p is associated with isotropichardening/softening (size of the yield surface) and a with kinematichardening (translation of the yield surface) in the viscoplastic flow process.Similarly, r denotes the accumulative viscodamage and C denotes the flux ofresidual stress (damage kinematic hardening) in the viscodamage growthprocess. The second-order gradients, r2�n, are suitable for the descriptionof the strain-softening regime. The assumed dependence of the Helmholtzfree energy on the distinct variables r2�n is also motivated by the necessityto include length-scale measures into the equations of state that link themesoscale interactions to the macroscale viscoplasticity and viscodamage,which cannot be captured by �n variables alone.
One of the current main challenges in constitutive modeling is thedetermination of the evolution equations for the assumed state variablesthat appeared in the Helmholtz free-energy density function (Equations(16)–(19)). This can be effectively achieved, so far, through the thermo-dynamic principles (Coleman and Gurtin, 1967; Lemaitre and Chaboche,1990; Lubliner, 1990; Simo and Hughes, 1998; Belytschko et al., 2000;Doghri, 2000). The Clausius–Duhem inequality can be written in the finitedeformation context as:
�ijdij � � _��þ � _TT� �
�1
TqiriT � 0 ð20Þ
where �, �, and q are the mass density, the specific entropy, and the heat fluxvector, respectively.
Finite Strain Plastic-damage Model for High Velocity Impact – Part I 305

For the purpose of describing the viscoinelastic behavior of the materialsinvolved in dynamic loading, an additive decomposition of specific free-energy function, �, into thermoelastic, thermoviscoplastic, and thermo-viscodamage parts is assumed here (e.g., Voyiadjis and Kattan, 1992a, b,1999; Hansen and Schreyer, 1994; Voyiadjis and Park, 1999; Abu Al-Ruband Voyiadjis, 2003), such that:
~�� eeij,T,riT, J;@_
k
� �¼ ~��te eeij, J
e,T,riT,�ij,r2�ij
� �þ ~��tvp T,riT, p,r
2p,�ij,r2�ij,�ij,r
2�ij
� �þ ~��tvd T,riT, r,r
2r,Gij,r2Gij,�ij,r
2�ij
� �ð21Þ
where �te is the thermoelastic stored energy which is assumed to equal thethermoelastic stored energy in the undamaged configuration, while �tvp and�tvd are energies stored due to material hardening in viscoplasticity andviscodamage deformation mechanisms, respectively.
Assuming incompressible inelastic deformation (detF vi¼ 1),
�ðeeij,T,riT, J;@_
kÞ ¼ ~��ðeeij,T,riT, Je;@
_
kÞ could be written. Furthermore,it should be noted that Equation (21) is a partially decoupled form of thespecific free energy �. There is no state coupling between viscoplasticity andelasticity, but the state coupling of viscodamage with the elastic andviscoplastic stored energies strongly appears in the above decomposition. Inparticular, the damage variables / and r2/ appear in all portions of � andthe other internal state variables are expressed in the current, deformed, anddamaged configurations. The variables / and r2/ appear implicitlyin �tvp through the evolution of its set of internal state variables aswill be shown in a later section.
General Thermodynamic Formulation
According to the definition given in the previous section for �, the timederivative of Equation (16) with respect to its internal state variables isgiven by:
_�� ¼@�
@eeij_eeeij þ
@�
@J e_JJ e þ
@�
@T_TTþ
@�
@riTri
_TTþ@�
@@k
_@_
@_
k ð22Þ
However, the invariance of _�� requires objective derivatives for the tensors.To avoid excessive contribution to the dissipated energy, rotationalderivatives are used here, such that:
_�� ¼@�
@eeij_eeeijr
þ@�
@J e_JJ e þ
@�
@T_TTþ
@�
@riTriTr
þ@�
@@_
k
@_
k
r
ð23Þ
306 R. K. ABU AL-RUB AND G. Z. VOYIADJIS

where ðrÞ designates the corotational derivative, which is objective underany rotation. Note that in Equation (23), the corotational derivative ofthe spatial elastic strain tensor, e
r, defines the elastic rate of deformation
tensor, d e. Substituting the rate of the Helmholtz free-energy density,Equation (22), into the Clausius–Duhem inequality, Equation (20), alongwith Equation (10) and _JJ e ¼ J ed e
ij�ij, the following thermodynamicconstraint is obtained:
�ij � �@�
@eeij
!d eij þ �ijd
viij � �
@�
@J eJ ed e
kk � �@�
@Tþ �
� �_TT
� �@�
@riTriTr
��@�
@@k@_
k
r
�qiTrT � 0 ð24Þ
Multiplying both sides of Equation (24) by the Jacobian determinantof F (i.e., J¼ �o/�) and assuming that the axiom of entropy productionholds, then the above inequality equation results in the followingthermodynamic state laws:
�ij ¼ �@�
@eeijor �ij ¼ J�ij ¼ �o
@�
@eeijð25Þ
P ¼ ��o@�
@J e; � ¼ �
@�
@T;
qi_TT¼ �o
@�
@riT;
Xk
¼ �o@�
@@_
k
ðk ¼ 1, . . . , 10Þ ð26Þ
The above equations describe the relations between the state variables andtheir associated thermodynamic conjugate forces. The Cauchy stress tensor,r, or the Kirchhoff stress tensor, s, are measures of the elastic changes in theinternal structure; P is the thermodynamic pressure conjugate to the elasticchange in volume due to high energy impacts. The state laws of the assumedinternal state variables, Equation (26)4, are expressed in Table 1 in termsof their associated internal state variables. The superscript ‘g’ in Table 1indicates the thermodynamic conjugate force corresponding to the second-order gradient or Laplacian of the assumed internal state variables. Theconjugate forces R, Rg, X, and Xg are measures of viscoplastic changes in theinternal structure, while K, Kg, H, and Hg are measures of the viscodamagechanges in the internal structure. Y and Yg are the damage forces, knownas the energy release rates resulting from the elastic-damage changes in theinternal structure.
Finite Strain Plastic-damage Model for High Velocity Impact – Part I 307

Gibbs relation and the Clausius–Duhem inequality are finally written,respectively, as follows:
�o _�� ¼ �ij dij � d viij
� �þ PJ ed e
kk � �o� _TTþqi_TTriTr
þ�int ð27Þ
� ¼ �ijdviij þ PJ ed e
kk ��int � qiriT
TþriTr
_TT
0@
1A � 0 ð28Þ
where � is the total dissipation energy and �int ¼P10
k¼1 �k @_
k
r
is the internalviscoinelastic dissipation energy. To this end, the following split is proposed:nint ¼ nvpint þ nvdint, where nvpint and nvdint refer to the number of internal statevariables related to viscoplastic and viscodamage effects, respectively. In thiscontext, this assumption leads to rewriting the dissipation energy, �, as thesummation of dissipations due to mechanical (viscoplasticity and visco-damage) and thermal (heat conduction) effects as:
� ¼ �vp þ�vd þ�th � 0, ð29Þ
where
�vp ¼ �ijdvpij þ PJ ed e
kk � R _pp� Rg r2pr
�Xij �ijr�Xg
ij r2�ij
r
� 0, ð30Þ
�vd ¼ �ijdvdij þ Yij �ij
r
þYgij r
2�ij
r
�K_rr� Kg r2rr
�Hij Gij
r
�Hgij r
2Gij
r
� 0, ð31Þ
�th ¼ �qiriT
TþriTr
_TT
0@
1A � 0: ð32Þ
Table 1. Thermodynamic state laws of viscoplasticity and viscodamage.
PlasticityIsotropic hardening R ¼ �o
@�tvp
@pRg ¼ �o
@�tvp
@r2p
Kinematic hardening Xij ¼ �o@�tvp
@�ijXgij ¼ �o
@�tvp
@r2�ij
DamageIsotropic hardening K ¼ �o
@�tvd
@rKg ¼ �o
@�tvd
@r2r
Kinematic hardening Hij ¼ �o@�tvd
@GijHgij ¼ �o
@�tvd
@r2Gij
Damage force �Yij ¼ �o@�te
@�ij�Yg
ij ¼ �o@�te
@r2�ij
308 R. K. ABU AL-RUB AND G. Z. VOYIADJIS

This result requires all viscoinelastic work to dissipate away as heat, exceptfor that energy which is stored because of the rearrangement of the materialinternal structure. Although, we write the thermoviscoinelastic dissipationfunction, �, in the decoupled form as shown by Equation (29), this does notimply that the corresponding physical mechanisms are decoupled. Strongcoupling does occur in the viscoplastic potential given by Equation (30)between viscoplasticity and viscodamage since the conjugate forces andtheir associated state variables are expressed in the current, deformed, anddamaged configuration of the material. Two additive damage mechanisms,hence, are introduced in the dissipation function, Equation (29); onemechanism is coupled with viscoplasticity and the other occurs independentof viscoplastic deformation.
It is clearly seen that the definition of � and consequently the evolution of@_
k (k¼ 1, . . . , 10) are essential features of the formulation to describe thethermomechanical/microstructural behavior of the material involved inthe deformation process. The associative evolution laws of d vi and /
rcan
be obtained by utilizing the calculus of several variables with Lagrangemultipliers _��vp and _��vd. The inelastic dissipation function �I
¼�vpþ�vd
(Equation (29)) is subjected to two constraints, namely f¼ 0 and g¼ 0 (e.g.,Voyiadjis and Kattan, 1992a, b):
� ¼ �vp þ�vd � _��vpf� _��vdg ð33Þ
We now make use of the maximum viscoinelastic dissipation principle(e.g., Simo and Honein, 1990; Simo and Hughes, 1998), which states thatthe actual state of the thermodynamic forces (s,Y ) is that which maximizesthe inelastic dissipation function over all other possible admissible states.We maximize, therefore, the objective function � by using the necessaryconditions as follows:
@�
@�ij¼ 0 and
@�
@Yij¼ 0 ð34Þ
Substitution of Equation (33) into Equation (34) along with Equations (30)and (31) yields the thermodynamic laws corresponding to the evolu-tion of the viscoinelastic rate of deformation (d vi
¼ d vpþ d vd) and the
viscodamage variable /r. Equation (34)1 gives the viscoinelastic strain rate as
follows:
d vpij ¼ _��vp
@f
@�ij, d vd
ij ¼ _��vd@g
@�ijð35Þ
Finite Strain Plastic-damage Model for High Velocity Impact – Part I 309

Similarly, Equation (34)2 gives the viscodamage evolution law as follows:
�ij
r
¼ ð1Þ�ij
r
þ ð2Þ�ij
r
ð36Þ
where
ð1Þ�ij
r
¼ _��vp@f
@Yij, ð2Þ�ij
r
¼ _��vd@g
@Yijð37Þ
The functions f and g are the dynamic viscoplastic and viscodamage loadingsurfaces that will be defined in later sections, respectively.
As a result we define, respectively, the conventional equivalent visco-plastic strain rate, _pp, and the accumulative viscodamage rate, _rr, as follows(Voyiadjis and Deliktas, 2000):
_pp ¼
ffiffiffiffiffiffiffiffiffiffiffiffiffiffiffi2
3d viij d
viij
r, _rr ¼
ffiffiffiffiffiffiffiffiffiffiffi�ij
r
�ij
r
rð38Þ
Next, to obtain non-associative rules for viscoplasticity and visco-damage local hardening variables ( p, a, r,C), which give a more realisticcharacterization of the material response in the deformation process,we assume the existence of a viscoplastic potential F and a viscodamagepotential G such that they are, respectively, not equal to f and g. Thecomplementary laws for the evolution of the local internal state variables(�n, n¼ 1, . . . , 5), summarized in Table 3, are obtained directly from thegeneralized normality rules. On the other hand, by adopting the assumptionof isotropic influence, the complementary laws for the evolution of thesecond-order gradients of the assumed local internal state variables(r2�n, n¼ 1, . . . , 5) can be directly obtained by operating on the localequations of Table 3 with the Laplacian. Similarly, r2�
rcan be obtained
from Equation (37). The resulting evolution laws are listed in Table 3. Bydoing this, we enhance the coupling between the evolutions of �n and r2�n,which will be thoroughly demonstrated in the subsequent sections and thesecond part of this work.
Specific Free-energy Function
We consider now a generic hypoelasto-thermo-viscoplastic and thermo-viscodamage model based on the general thermodynamic frameworkdeveloped in the previous sections.
310 R. K. ABU AL-RUB AND G. Z. VOYIADJIS

As it is clearly seen from the previous section, the complexity of a model isdirectly determined by the form of the Helmholtz free energy � and bythe number of conjugate pairs of variables. Therefore, the definition of �constitutes a crucial point of the formulation since it is the basis for thederivation of all constitutive equations to be described in what follows. It ispossible to decouple the Helmholtz free energy into a potential function foreach of the internal state variable in such a way that an analytical expressionfor the thermodynamic potential is given as a quadratic form of its internalstate variables. However, coupling is possible in the viscoplastic potential orthe viscodamage potential if they depend on more than one variable, whichmakes the evolution equations more complex. Moreover, Chaboche (1991)indicated that an energy � with non-quadratic kinematic hardeningvariables leads to abnormal results; however, coupling with temperature isnot discussed there. As a matter of fact, under high strain rate loading asignificant temperature rise is produced due to adiabatic heating, whichshould be considered in constitutive modeling. Experimental results alsoindicate that plastic deformation is not the dominating source of heatgeneration during dynamic deformation, but thermodamage coupling mustbe considered in the simulation for more accurate comparisons withexperiments (Bjerke et al., 2002). In the following, a multiplicativetemperature coupling term is introduced in the viscoplasticity and visco-damage hardening state variables for more realistic description oftheir evolution. The thermoelastic energy, �te, can then be postulated asfollows:
�o�te ¼
1
2eeijCijkl /
_� �
eekl � ij /_
� �eeij T� Trð Þ � �r T� Trð Þ �
�o2Tr
cp T� Trð Þ2
�1
2 _TTkijriTrjTþ cv T ig � Tr
� �ð39Þ
On the other hand, the thermoviscoplastic and thermoviscodamage energies,�tvp and �tvd, are assumed, respectively, as follows:
�o�tvp ¼
1
2a1p
2#þ1
2b1 r2p� �2
#þ1
2a2�ij�ij#þ
1
2b2r
2�ijr2�ij# ð40Þ
�o�tvd ¼
1
2a3r
2#þ1
2b3 r2r� �2
#þ1
2a4GijGij#þ
1
2b4r
2Gijr2Gij# ð41Þ
where Cð/_
Þ is the fourth-order damage elastic tensor as a function of /_
,Equation (14); ð/
_
Þ is the second-order tensor of the thermomechanicalcoefficients (or sometimes referred to as the tangent conjugate of thermaldilatation) as a function of /
_
; cp is the specific heat at constant pressure;
Finite Strain Plastic-damage Model for High Velocity Impact – Part I 311

�r is the reference entropy; ak and bk (k¼ 1, . . . , 4) are the material-dependent constants, which are considered independent of temperature;Tr is the reference temperature; kij¼ k�ij is the heat conductivity second-rank tensor (k being the conductivity coefficient); # is the homologoustemperature defined as # ¼ 1� ðT=TmÞ
n, where Tm is the meltingtemperature and n is the temperature softening component, which mightbe assumed different for each hardening mechanism; cv is the specific heatat constant volume; and T ig is chosen to have the form of ideal gastemperature, which can be expressed as follows:
T ig ¼ Tr exp�� �rcv
� 1þ "e½ �
ð�1Þexp � 1ð Þ1
1þ "eð Þ � 1
� �� ð42Þ
In the above equation, ¼ cp/cv is the ratio of specific heat, where cp is thespecific heat at constant pressure. Both cv and cp are related to the gasconstant < by < ¼ cp � cv. The above expression is postulated to derivean expression for the equation of state, which relates pressure to specificdensity. In Equation (42) "e¼ 1/J e
� 1 is the nominal volumetricelastic strain.
The constitutive equations for the thermoelastic Kirchhoff stress tensor,Equation (25)2, can be expressed from the thermodynamic potential,Equation (39), as follows:
�ij ¼ Cijkl ekl � evpkl � evdkl� �
� ij T� Trð Þ ð43Þ
Furthermore, by using Equations (8), (13), and (14) the stress relationEquation (43) can be written in the effective (undamaged) configuration asfollows:
���ij ¼ �CCijkl �eeekl �
�ij T� Trð Þ ð44Þ
where �bb ¼ M_
:b and �bb ¼ 3K e�t1 with K e is the effective bulk modulus,�t is the coefficient of thermal expansion, and 1 is the second-order unittensor.
Using Equation (26)1 the thermodynamic pressure stress P is given asfollows:
P ¼ 1� ð ÞcvTig"e ð45Þ
which gives the equation of state necessary for high-impact loading. Theequation of state accounts for compressibility effects (changes in density).
312 R. K. ABU AL-RUB AND G. Z. VOYIADJIS

The constitutive equation for the heat flux vector q can be obtained fromEquation (26)3 as follows:
qi ¼ �kijrjT ð46Þ
which is the well-known Fourier heat conduction law. The negativesign indicates that the heat flow is opposite to the direction of temperatureincrease.
The state laws of the assumed internal state variables, Equation (26)4,are obtained using the equations outlined in Table 1 along with thethermodynamic potentials, Equations (39)–(41), and are listed in Table 3.These conjugates are linear relations in terms of their associated internalstate variables due to the particular definition of �tvp and �tvd given byEquations (40) and (41), respectively.
A systematic way to show the dependency between the derived local statelaws and the state laws associated with their Laplacian is outlined in thesubsequent section.
The Nonlocal Conjugate Forces
As mentioned in the section on ‘Viscoplasticity and Damage InternalState Variables’, the assumed internal state variables in the current work areno longer independent and special care must be taken to properly accountfor state variable coupling between�n andr2�n. Starting from Equation (5),the nonlocal evolution of �
_
n is written as follows (note that in all equationsthat follow, there is no sum in subscript n when n is repeated):
�n
r
¼ _��n þ1
2l2n r
2�n
r
ðn ¼ 1, . . . , 4 and no sum in nÞ ð47Þ
such that
_p_p_¼ _ppþ
1
2‘21 r2p
r
; �_
ij
r
¼ �ijrþ1
2‘22 r2�ij
r
;
_r_r_¼ _rrþ
1
2‘23 r2r
r
; G_
ij
r
¼ Gij
r
þ1
2‘24 r2Gij
rð48Þ
In Equations (47) and (48), the gradient parameters ‘n (n¼ 1, . . . , 4) arelength parameters required for dimensional consistency and they set thescales at which the gradients become important. They give rise to explicitlength-scale measures. Even though a recent study by the current authors
Finite Strain Plastic-damage Model for High Velocity Impact – Part I 313

(Abu Al-Rub and Voyiadjis, 2004; Voyiadjis and Abu Al-Rub, 2005)showed that the length-scale parameter changes with the microstructuralfeatures (e.g., grain size, dislocation spacing, etc.), the length-scale measuresare treated as constants in this study. Moreover, Abu Al-Rub and Voyiadjis(2004) proposed that the gradient parameters ‘n (n¼ 1, . . . , 4) must becalibrated from micromechanical tests where size effects and inelasticheterogeneity are encountered. Examples of such tests are micro-/nano-indentation tests (Stelmashenko et al., 1993), microbending tests (Stolkenand Evans, 1998), and microtorsion tests (Fleck et al., 1994).
The evolution laws of �n (n¼ 1, . . . , 4) and their corresponding Laplacianr2�n are given in Table 2. Following the equations listed in Table 3 forviscoplasticity and viscodamage hardening conjugate forces, we can expressthe evolution equations of the corresponding nonlocal conjugate forces at agiven temperature as follows:
�_
n
r
¼ cn �_
n
r
# ðn ¼ 1, . . . , 4 and no sum in nÞ ð49Þ
where cn (n¼ 1, . . . , 4) are material parameters that are characterized
as hardening moduli. Moreover, �_
n
r
can be additively decomposed intotwo parts: one corresponding to the local counterpart of �
_
n and theother corresponding to the Laplacian counterpart, r2�n, such that(see Table 3):
�_
n
r
¼ �n
r
þ�gn
r
ðn ¼ 1, . . . , 4Þ ð50Þ
Table 2. The thermodynamic laws for the evolutionof the internal state variables.
PlasticityIsotropic hardening _pp ¼ � _��vp
@F
@Rr2pr
¼ �r2 _��vp@RF � _��vpr2@RF
Kinematic hardening �ijr
¼ � _��vp@F
@Xijr2�ij
r
¼ �r2 _��vp@XF � _��vpr2@XF
DamageIsotropic hardening _rr ¼ � _��vd
@G
@Kr2rr
¼ �r2 _��vd@KG� _��vdr2@KG
Kinematic hardening Gij
r
¼ � _��vd@G
@Hijr2Gij
r
¼ �r2 _��vd@HG� _��vdr2@HG
Damage variable r2�ij
r
¼ r2 ð1Þ�ij
r
þr2 ð2Þ�ij
r, r2 ð1Þ�ij
r
¼ r2 _��vp@Y f þ _��vpr2@Y f
r2 ð2Þ�ij
r
¼ r2 _��vd@Ygþ _��vdr2@Yg
314 R. K. ABU AL-RUB AND G. Z. VOYIADJIS

The conjugate forces �n
r
and �gn
r
(n¼ 1, . . . , 4) are given at constanttemperature, respectively, as follows (see Table 3):
�n
r
¼ an �n
r
# ðn ¼ 1, . . . , 4 and no sum in nÞ ð51Þ
�gn
r
¼ bn r2�n
r
# ðn ¼ 1, . . . , 4 and no sum in nÞ ð52Þ
However, substituting Equation (47) into Equation (49) yields:
�_
n
r
¼ cn �n
r
#þ1
2cn‘
2n r
2�n
r
# ðn ¼ 1, . . . , 4 and no sum in nÞ ð53Þ
Comparing Equation (53) with Equations (50)–(52) yields:
‘n ¼
ffiffiffiffiffiffiffi2bnan
swhere cn ¼ an ðn ¼ 1, . . . , 4Þ ð54Þ
Taking the Laplacian of Equation (51) and neglecting temperature gradientswe obtain:
r2�n
r
¼ an r2�n
r
# ðn ¼ 1, . . . , 4 and no sum in nÞ ð55Þ
Comparing the above equation with Equation (52) yields
�gn
r
¼bnan
r2�n
r
ðn ¼ 1, . . . , 4 and no sum in nÞ ð56Þ
Table 3. Expressions for the thermodynamic conjugate forces derivedfrom the specific free-energy function.
PlasticityIsotropic hardening R ¼ a1p# Rg ¼ b1 r2p
� �#
Kinematic hardening Xij ¼ a2�ij# Xgij ¼ b2 r2�ij
� �#
DamageIsotropic hardening K ¼ a3r# Kg ¼ b3 r2r
� �#
Kinematic hardening Hij ¼ a4Gij# Hgij ¼ b4 r2Gij
� �#
Damage force �Yij ¼@
@�ij
eemnCmnpqeepq
�mneemnðT � TrÞ
!�Yg
ij ¼@
@r2�ij
eemnCmnpqeepq
�mneemnðT�TrÞ
!
Finite Strain Plastic-damage Model for High Velocity Impact – Part I 315

Hence, Equation (50) can be rewritten as follows:
�_
n
r
¼ �n
r
þbnan
r2�n
r
ðn ¼ 1, . . . , 4 and no sum in nÞ ð57Þ
or substituting for bn=an from Equation (54) we can rewrite the aboveequation as follows:
�_
n
r
¼ �n
r
þ1
2‘2n r
2�n
r
ðn ¼ 1, . . . , 4 and no sum in nÞ ð58Þ
which shows a similar relation to that of their corresponding fluxes given byEquation (47). The above results are summarized in Table 4.
The nonlocal evolution equation of the damage variable / can also bewritten from Equation (5) as follows:
�_
ij
r
¼ �ij
r
þ ar2�ij
r
ð59Þ
where a ¼ ð1=2Þ‘25 and the evolution equations of / and r2/ are given inTable 2. Using Equation (15) we then write:
M_�1
ikjl ¼ M�1ikjl þ ar2M�1
ikjl ð60Þ
Table 4. The nonlocal thermodynamic laws and the correspondinglength parameters at a given temperature.
Local Gradient NonlocalLength
parameter
PlasticityIsotropichardening
_RR ¼ a1 _pp# _RRg ¼ b1r2pr
#_R_
R_
¼ _RRþ ð1=2Þ ‘21r2R
r
‘1 ¼ffiffiffiffiffiffiffiffiffiffiffiffiffiffiffi2b1=a1
p
Kinematichardening
Xijr
¼ a2�ijr# Xg
ij
r
¼ b2r2�ijr
# X_
ij
r
¼ Xijr
þ ð1=2Þ‘22 r2Xijr
‘2 ¼ffiffiffiffiffiffiffiffiffiffiffiffiffiffiffi2b2=a2
p
DamageIsotropichardening
_KK ¼ a3_rr# _KKg ¼ b3r2rr
#_K_
K_
¼ _KK þ ð1=2Þ‘23 r2Kr
‘3 ¼ffiffiffiffiffiffiffiffiffiffiffiffiffiffiffi2b3=a3
p
Kinematichardening
Hij
r
¼ a4 Gij
r
# Hgij
r
¼ b4r2Gij
r
# H_
ij
r
¼ Hij
r
þ ð1=2Þ‘24 r2Hij
r
‘4 ¼ffiffiffiffiffiffiffiffiffiffiffiffiffiffiffi2b4=a4
p
316 R. K. ABU AL-RUB AND G. Z. VOYIADJIS

where
M�1ikjl ¼
1
2�ik��ikð Þ�jlþ �ik �jl��jl
� � �and r2M�1
ikjl ¼�1
2r2�ik�jlþ �ikr
2�jl
� �ð61Þ
Viscoplasticity and Viscodamage Potentials
The next important step in constitutive modeling is the selection of theappropriate form of the viscoplastic potential function F and the visco-damage potential functionG to establish the desired constitutive equations. Itis clearly seen in the previous sections that the viscodamage evolution laws arestrongly coupled with viscoplasticity. To maintain this strong coupling, twoindependent damage mechanisms are distinguished. One mechanism iscoupled with viscoplasticity, while the other is independent of the viscoplasticdeformation. The first mechanism is dominant in the case of shear stressesand the second is due to hydrostatic stresses. To be consistent and to satisfy thegeneralized normality rule of thermodynamics, a proper analytical form for Fand G need to be postulated in the undamaged configuration, such that:
F ¼ fþ1
2k1
�R_
R_2 þ
1
2k2
�X_
X_
ij�X_
X_
ij and G ¼ gþ1
2h1K
_2 þ
1
2h2H
_
ijH_
ij ð62Þ
where ki and hi (i¼ 1, 2) are material constants used to adjust the units of the
terms comprising the above equations. The second-order tensor�X_
X_
¼ �XXþ �XXg
is the nonlocal effective backstress tensor associated with the kinematichardening and, analogous to Equation (8), can be related to its nominal partas follows:
�X_
X_
ij ¼ M_
ikjl X_
kl with �XXij ¼ M_
ikjlXkl and �XXgij ¼ M
_
ikjlXgkl ð63Þ
The isotropic hardening/softening represents a global expansion/contraction in the size of the yield surface with no change in shape. Thusfor a given yield criterion and flow rule, isotropic hardening/softening in anyprocess can be predicted from the knowledge of the function �R
_
R_
¼ �RRþ �RRg
and this function may, in principle, be determined from a single test (e.g.,the tension test). Therefore, the effective isotropic hardening functions�R_
R_
, �RR, and �RRg are related to the nominal isotropic hardening functions R_
, R,and Rg, respectively, as follows:
�R_
R_
¼R_
1� r_ , �RR ¼
R
1� r_ , �RRg ¼
Rg
1� r_ ð64Þ
Finite Strain Plastic-damage Model for High Velocity Impact – Part I 317

where r_is defined as the nonlocal accumulative viscodamage with _rr given by
Equation (38)2, such that we express
r_¼
Z t
0
_r_r_dt with _r
_r_¼
ffiffiffiffiffiffiffiffiffiffiffiffi�_
ij
r
�_
ij
rr
ð65Þ
The derived flow rules, Equations (35) and (37), and the potential functions,Equations (62), indicate the need for two loading surfaces f and g. Thus,the coupled anisotropic viscodamage and viscoplasticity formulationis a two-surface model whereby anisotropic viscodamage is formulated inthe spirit of viscoplasticity, complete with a viscodamage criterion andflow rules. It is possible, however, to activate one or both of thesurfaces depending on the corresponding criteria for viscoplasticity andviscodamage.
VISCOPLASTICITY SURFACE AND THECORRESPONDING HARDENING RULES
It seems natural that viscoplasticity can only affect the undamaged(effective) material skeleton. Therefore, the viscoplastic function f is definedin terms of the effective stresses and strains. There are many viscoplasticmodels in recent literature for dynamic material behavior at highstrain rates and temperatures. A generalized dynamic surface, f, basedon Perzyna unified viscoplasticity model can be utilized (Voyiadjis et al.,2003, 2004):
f ¼ffiffiffiffiffiffiffi3J2
p�
h�YYo þ
�R_
R_ih1þ
��vp
_�p_p_�p_p_�1=m1
i# � 0 ð66Þ
where J2 ¼ 1=2 ð�ss0 ��X_
X_
Þ : ð�ss0 ��X_
X_
Þ is the second invariant of the resultantdeviatoric stress tensor ð�ss0 �X
_
Þ; �ss0 is the effective deviatoric part of theKrichhoff stress tensor ; �YYo is the initial yield stress in the undamaged stateat zero absolute temperature, zero viscoplastic strain, and static strainrate; �vp is the viscosity or fluidity parameter, which is referred to as
the relaxation time according to the notation given by Perzyna (1988); _�p_p_�p_p_ isthe nonlocal effective accumulative viscoplastic strain (see Equation (48));m1 is the viscoplastic rate sensitivity parameter; and # ¼ 1� ðT=TmÞ is thehomologous temperature.
The criterion in Equation (66) is a generalization of the classicalrate-independent von-Mises yield criterion for rate-dependent materials.The latter can simply be recovered by imposing �vp¼ 0 (no viscosity effect),so that we have the case f� 0. The extended criterion given by Equation (66)will play a crucial rule in the dynamic finite element formulation described
318 R. K. ABU AL-RUB AND G. Z. VOYIADJIS

in the second part of this work. It also allows a generalization of thestandard Kuhn–Tucker loading/unloading conditions (Voyiadjis et al.,2003, 2004):
f � 0, _��vp � 0, _��vpf ¼ 0 ð67Þ
with the generalized consistency condition for rate-dependent problemsis given by:
_��vp _ff � 0 ð68Þ
In Equation (66), f can expand and shrink not only by softening/hardening effects, but also due to softening/hardening rate effects. Theright-hand side of Equation (66) defines the flow stress as a function ofstrain, strain-rate, and temperature and it converges to a great extent to theclassical (local) constitutive laws of Johnson and Cook (1985), Zerilli andArmstrong (1987), and Voyiadjis and Abed (2005).
It is noteworthy that the adopted yield surface f, is a fully nonlocalsurface, which is different from the nonlocal yield surfaces presented in theliterature up to now. Most of these surfaces introduce nonlocality onlythrough the isotropic hardening conjugate force, R (see e.g., de Borst andSluys, 1991; Aifantis, 1992; Pamin, 1994; Fremond and Nedjar, 1996;Peerlings et al., 1996; Fleck and Hutchinson, 1997; Gao et al., 1999;Askes et al., 2000; Svedberg and Runesson, 2000; Liebe et al., 2003). Veryfew also introduce nonlocality through the kinematic hardening conjugateforce, X (e.g., Voyiadjis et al., 2001, 2003, 2004). Both of the aforementionedapproaches are quasi-nonlocal in a sense that a local quantity is added to anonlocal quantity. In other words, for those who introduce nonlocalitythrough R are adding to it a local part through J2, whereas for those whointroduce nonlocality through X are adding to it a local part through s0.However, in the current model, thanks to the effective (undamaged)configuration, nonlocality is introduced through �RR by p
_and /
_
, through �XXby p
_and /
_
, and through �ss0 by /_
.The effective rate of the accumulative viscoplastic strain, _�pp�pp, is defined by:
_�pp�pp ¼
ffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffi2
3�dd vpij
�dd vpij
rð69Þ
where �dd vp is the viscoplastic strain rate in the effective configuration.Moreover, the energy-correlating hypothesis is adopted; each type ofenergy process in the damaged state is equal to corresponding to theeffective configuration. Thus, �dd vp can be related to d vp (Equation (35)1)
Finite Strain Plastic-damage Model for High Velocity Impact – Part I 319

through the use of the viscoplastic strain energy equivalence hypothesis(e.g., Lee et al., 1985; Voyiadjis and Thiagarajan, 1997; Voyiadjisand Deliktas, 2000), which states that the viscoplastic energy in termsof the effective and nominal stress and strain quantities must be equal.This gives the following relation, such that:
�dd vpij ¼ M
_�1ikjl d
vpkl ð70Þ
Substituting Equation (35)1 into Equation (70) and by making use of theeffective stress definition (Equation (8)) and the chain rule, we can write �dd vp
as follows:
�dd vpij ¼ _��vp
@f
@ ���ijð71Þ
Since ð@f=@�ssÞ : ð@f=@�ssÞ ¼ 1:5, it can be easily shown that _�pp�pp defined byEquation (69) is related to _��vp by:
_�pp�pp ¼ _��vp ð72Þ
Substituting Equation (62)1 into the evolution law of _pp from Table 2,making use of the chain rule with Equation (64)2, and finally comparing theresult with Equation (72) yields the following expression:
_pp ¼_�pp�pp
1� r_ 1� k1
�R_
R_
� �ð73Þ
Note that in obtaining the above equation we set ð@f=@RÞ ¼ �1 since theevolution of R characterizes the radius of the yield surface in the absenceof the strain rate effect. Moreover, by making use of the assumption ofisotropy (i.e., neglecting the odd gradient terms) and neglecting higher-orderterms, we obtain the following relation by either substituting Equation (64)2and _��vp from Equation (72) into the definition of r2 _pp outlined in Table 2 orby simply taking the Laplacian of Equation (73), such that:
r2 _pp ¼r2 _�pp�pp
1� r_ þ
r2r
1� r_� �2 _�pp�pp
!1� k1
�R_
R_
� ��
_�pp�pp
1� r_ k1r
2 �RR ð74Þ
The term r2 �RR is obtained by substituting Equation (64)2 into Equation (56),such that:
r2 �RR ¼a1b1
�RRg þr2r
1� r_�RR ð75Þ
320 R. K. ABU AL-RUB AND G. Z. VOYIADJIS

Making use of _RR and _RRg relations from Table 4 together with thecorotational derivative of Equations (64) for a given temperature whilemaintaining the damage history constant (i.e., the damage internal statevariable / and temperature T are kept constant) and substituting _�pp�pp for _ppfrom Equation (73) and r2_�pp�pp for r2 _pp from Equation (74) along withEquation (75), we obtain the following evolution equations for �RR and �RRg,respectively, as follows:
_�RR�RR ¼a1#
1� r_� �2 1� k1
�R_
R_
� �_�pp�pp ð76Þ
_�RR�RRg¼ SR
1_�pp�ppþ SR
2 r2 _�pp�pp ð77Þ
where
SR1 ¼
#
1� r_� �3 b1 1� 2k1 �RR� k1 �RRg
� �r2r� k1a1 1� r
_� ��RRg
�and
SR2 ¼
b1#
1� r_� �2 1� k1
�R_
R_
� � ð78Þ
The nonlocal evolution equation for the isotropic hardening in the effective
configuration,_�R_
R_�R_
R_
, can then be written according to Equation (50) or fromTable 4 as follows:
_�R_
R_�R_
R_
¼_�RR�RRþ
_�RR�RRg
ð79Þ
To derive the nonlocal kinematic hardening evolution equation associatedwith viscoplasticity, we make use of the evolution of a in Table 2 along withthe chain rule and Equations (62)2, (63)2, (71), and (72) such that one canwrite the following relation:
�ijr
¼ M_
minj�dd vpmn � k2
�X_
X_
mn_�pp�pp
� �ð80Þ
However, using the Xr
relation in Table 4 and operating on the �XX relationof Equation (63)2 with the corotational derivative for a given temperatureand keeping the damage history constant, we can write the followingevolution equation for �XX as follows:
�XXij
r
¼ M_
ikjlM_
mknl a2 �ddvpmn � k2a2 _�pp�pp
�X_
X_
mn
� �# ð81Þ
Finite Strain Plastic-damage Model for High Velocity Impact – Part I 321

Again, with the assumption of isotropy (i.e., neglecting the oddgradient terms) and neglecting higher-order terms, either by utilizingEquations (62), (71), and (72) into the evolution law of r2a from Table 2or by taking the Laplacian of Equation (80), the following expression canbe obtained:
r2 �ijr
¼ M_
minj r2 �dd vpmn � k2
�X_
X_
mnr2 _�pp�ppþ _�pp�ppr2 �XXmn
� �� þ r2M
_
minj�dd vpmn � k2
�X_
X_
mn_�pp�pp
� �ð82Þ
The term r2 �XX is obtained by substituting Equations (63) into Equation (56),such that:
r2 �XXij ¼a2b2
�XXgij �M
_
kiljr2M�1
krls�XXrs ð83Þ
Making use of Equation (82) into the Xgr
relation from Table 4 alongwith Equation (83) and the corotational derivative of �XXg relation ofEquation (63)3 for a given temperature while keeping the damage historyconstant, we then write the gradient-dependent evolution equation of
viscoplasticity kinematic hardening in the effective configuration, �XXgr
, asfollows:
�XXgij
r
¼ ð1Þ �XXgij
r
þ ð2Þ �XXgij
r
ð84Þ
ð1Þ �XXgij
r
¼ M_
ikjlM_
mknl b2r2 �dd vp
mn � k2b2�X_
X_
mnr2 _�pp�pp
�
� k2 a2 �XXgmn � b2M
_
pmqnr2M�1
prqs�XXrs
� �_�pp�ppi# ð85Þ
ð2Þ �XXgij
r
¼ M_
ikjlr2M
_
mknl b2 �ddvpmn � k2b2
�X_
X_
mn_�pp�pp
� �# ð86Þ
r2 �dd vpij ¼ r2 _�pp�pp
@f
@�ssijð87Þ
Note that since f¼ 0, Equations (84)–(87) are obtained by assuming thatr2ð@�ss f Þ ¼ @�ssðr
2f Þ ¼ 0. This assumption implies that the considered pointhas yielded as well as the surrounding volume of a sphere of diameter ‘c (i.e.,the length parameter) and there is no change in the flow direction with theposition within ‘c.
322 R. K. ABU AL-RUB AND G. Z. VOYIADJIS

By taking the Laplacian of the identity M_
:M_�1
¼ I, we can write thefollowing relation r2 M
_
as it appears in Equation (86):
r2M_
ikjl ¼ �M_
kmlnM_
irjsr2M�1
rmsn ð88Þ
The nonlocal evolution equation for kinematic hardening in the effective
configuration, �X_
X_r
, can now be expressed according to Equation (50) or from
Table 4 as follows:
�X_
X_r
ij ¼�XXij
r
þ �XXgij
r
ð89Þ
DAMAGE EVOLUTION CRITERION AND THECORRESPONDING HARDENING RULES
The anisotropic viscodamage governing equations are viscoplasticity-like.Analogous to the dynamic viscoplastic surface presented in the previoussection, a fully-nonlocal viscodamage surface g can then be simply assumedas follows:
g ¼
ffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiY_
ij �H_
ij
� �Y_
ij �H_
ij
� �r�lo þ K
_�1þ ð�vd _r
_r_Þ1=m2
�# � 0 ð90Þ
where the nonlocal damage forces Y_
and H_
are, respectively, characterizingthe viscodamage evolution and the viscodamage kinematic hardening laws;lo is the initial damage threshold at zero absolute temperature, zero damagestrain, and static strain rate; K
_
is the nonlocal damage isotropic hardeningfunction; �vd is the relaxation time that corresponds to the damage growth;and m2 is the viscodamage rate sensitivity parameter. For generality, it isassumed here that the time-dependent behavior of both viscoplasticityand viscodamage mechanisms are controlled by different relaxation timesassociated with _�p
_p_�p_p_ and _r
_r_, which may not generally be the case.
The above postulated dynamic viscodamage function g¼ 0 is a general-ization of the static (rate-independent) damage surface for rate-dependentmaterials. Similar to the viscoplastic surface, the static damage surfacecan be simply recovered by imposing �vd¼ 0 (no viscous effect), so thatwe have the rate-independent damage case g� 0. The model response inthe viscodamage domain is then characterized by the Kuhn–Tuckercomplementary conditions as follows:
g � 0, _��vd � 0, _��vdg ¼ 0 ð91Þ
Finite Strain Plastic-damage Model for High Velocity Impact – Part I 323

and the damage generalized consistency condition for rate-dependentproblems is given by:
_��vd _gg ¼ 0 ð92Þ
To derive the hardening evolution equations associated with the visco-damage process, we follow the same procedure presented in the formersection for viscoplasticity. By substituting Equation (62)2 into the evolutionlaw of _rr from Table 2, the following relation is obtained:
_rr ¼ _��vd 1� h1K_
� �ð93Þ
By taking the Laplacian of Equation (93) and making use of the assumptionof isotropy, we obtain:
r2 _rr ¼ r2 _��vd 1� h1K_
� �� h1 _��
vdr2K ð94Þ
where r2K ¼ a3Kg=b3 from Equation (56). The evolution equation for K
_
can be obtained by first making use of Equations (93) and (94) into _KK and_KKg relations in Table 4 for a given temperature, such that the followingexpressions are obtained:
_KK ¼ a3 1� h1K_
� �_��vd# and _KKg ¼ b3 1� h1K
_� �
r2 _��vd � h1a3Kg _��vd
h i#
ð95Þ
The nonlocal evolution equation for the viscodamage isotropic hardening
law,_K_
K_
, can then be written according to Equation (50) or from Table 4 asfollows:
_K_
K_
¼ _KKþ _KKg ð96Þ
Furthermore, the evolution equation for H_
can be obtained by utilizing
Equation (62)2 into Gr
and r2Gr
relations from Table 2 along with
Equation (37)2, such that:
Gij
r
¼ ð2Þ�ij
r
�h2 _��vdH
_
ij and r2 Gij
r
¼ r2 ð2Þ�ij
r
�h2 H_
ijr2 _��vd þ _��vdr2Hij
� �ð97Þ
where r2H ¼ a4Hg=b4 from Equation (56). It can then be easily shown
by utilizing, respectively, Equations (97) into Hrand Hg
rlaws from Table 4
324 R. K. ABU AL-RUB AND G. Z. VOYIADJIS

for a given temperature that the following evolution equations are obtained:
Hij
r
¼ a4ð2Þ�ij
r
�h2a4 _��vdH
_
ij
!# and
Hgij
r
¼ b4r2 ð2Þ _��ij
r
�h2b4H_
ijr2 _��vd � h2a4H
gij_��vd
" ##
ð98Þ
where r2 ð2Þ/r
¼ r2 _��vd@g=@Y. The nonlocal evolution equation for the
viscodamage kinematic hardening law,H_r
, can then be written according toEquation (50) or from Table 4 as follows:
H_
ij
r
¼ Hij
r
þHgij
r
ð99Þ
Finally, to obtain the nonlocal viscodamage force, first the state laws Yand Yg from Table 3 are expanded such that the following expressions areobtained after performing some lengthy algebraic manipulations:
Yij ¼1
2�mn � mn T� Trð Þð ÞM
_
manbJarbsijC�1rspq �pq þ pq T� Trð Þ� �
ð100Þ
Ygij ¼
a
2�mn � mn T� Trð Þð ÞM
_
manbJarbsijC�1rspq �pq þ pq T� Trð Þ� �
ð101Þ
where J is a sixth-order constant tensor and is given by:
Jarbsij ¼ �@M
_�1arbs
@�ij¼ �a
@M_
�1arbs
@r2�ij¼ �
@M_
�1arbs
@�_
ij
¼1
2�ar �bi �sj þ �ai �rj �bs� �
ð102Þ
Hence, the nonlocal viscodamage force is obtained as the sum ofEquations (100) and (101), such that:
Y_
ij ¼1þ að Þ
2�mn � mn T�Trð Þð ÞM
_
manb JarbsijC�1rspq �pq þ pq T�Trð Þ� �
ð103Þ
RATE-TYPE CONSTITUTIVE RELATION
Operating on the stress relation of Equation (43) with the corotationalderivative yields:
�ijr¼ Cijkl dkl � d vp
kl � d vdkl
� �þ Cijkl
r
eekl � ij_TT� ij
r
T� Trð Þ ð104Þ
Finite Strain Plastic-damage Model for High Velocity Impact – Part I 325

where Cr
and br
are given by
Cr
ijkl ¼@Cijkl
@M_
�1abuv
M_
�1abuv
r
¼@Cijkl
@M_
�1abuv
@M_
�1abuv
@�mn�mn
r
and
r
ij ¼@ij
@M_
�1abuv
M_
�1abuv
r
¼@ij
@M_
�1abuv
@M_
�1abuv
@�mn�mn
r
ð105Þ
Making use of Equations (10), (14), (44), and (102), we then obtain, aftersome lengthy algebraic manipulations and for a general thermo-hypoelasto-viscoplastic–viscodamage flow processes, the following relation:
�ijr¼ Cijkl dkl � d vp
kl � d vdkl
� �� Aijkl �kl
r
�ij_TT ð106Þ
where
Aijkl ¼ �@Cijmn
@M_
�1abuv
eemn þ@ij
@M_
�1abuv
T� Trð Þ
" #@M
_�1abuv
@�kl
¼ JibjvklM_
bpvq�pq þ CijmnM_
manu C�1bvrs �rs þ rs T� Trð Þð ÞJabuvkl
ð107Þ
It is noteworthy that the above incremental stress–strain relation can besimilarly found using the stress–strain relation in the effective configuration(Equation (44)). This equation shows that softening occurs due to thethermal and damage evolution.
THERMOMECHANICAL COUPLING
A local increase in temperature may influence the material behaviorduring deformation; necessitating the inclusion of temperature in theconstitutive modeling of the material. Substituting the internal energydensity e
e ¼ �þ T� ð108Þ
into the first law of thermodynamics
� _ee ¼ �ijdij þ �rext � riqi ð109Þ
326 R. K. ABU AL-RUB AND G. Z. VOYIADJIS

yields the following energy balance equation
� _��þ � _TTþ _��T� �
� �ijdij � �rext þ riqi ¼ 0 ð110Þ
where rext is the density of external heat. Multiplying both sides ofEquation (110) by J¼ �o/� and substituting �o _�� from Equation (27) into theresulting expression and taking into account Equation (46) yields thefollowing relation:
�o _��T ¼ �ij d vpij þ d vd
ij
� �� J ePd e
kk ��int þ �orext
þ ~kkijriTrjTþ1
_TT~kkij riT
r
rjT ð111Þ
where ~kkij ¼ �okij=�. Making use of the definition for the specific entropy � ¼
~�� ee,T,@k; k ¼ 1, . . . , 10ð Þ, operating on the entropy relation, Equation (26)2,with the corotational derivative and substituting the result intoEquation (111) gives the thermomechanical heat balance equation as follows:
�ocp _TT ¼ ��ij d vpij þ d vd
ij
� �� J ePd e
kk þX10k¼3
@�k
@TT��k
� �@k
r
� ijdeijTþ �rext þ ~kkijriTrjT ð112Þ
In the above equation, cp ¼ T@�=@T is the tangent specific heat capacity atconstant pressure which is used to approximate the specific heat capacityat constant stress, and � is the fraction of the viscoinelastic work rateconverted to heat which is incorporated into the heat balance equation formore accurate comparisons with experiments.
The left-hand side of Equation (112) represents the total thermaldissipation. The first term on the right-hand side represents the rate ofviscoinelastic work converted to heat; the second term represents theheat generation due to shock compression/dilatation-release; the thirdterm represents the rate of internal heat generation that encompasses alldissipative processes excluding the gross viscoinelastic deformation thatis present during viscoplastic and viscodamage deformation; the fourthterm is the reversible thermoelastic effect; the fifth term representsan external heat source; and the last term is due to parabolicheat conduction. If the duration of the event is sufficiently short, thethermal conduction term becomes negligible, i.e., adiabatic conditionsprevail.
Finite Strain Plastic-damage Model for High Velocity Impact – Part I 327

FAILURE CRITERION
In this development, the failure criterion is based on the nonlocalevolution of the accumulated microdamage internal state variable, /
_
, andthe equation of state for the thermodynamic pressure. It implies that for
�_
��� ��� ¼
ffiffiffiffiffiffiffiffiffiffiffi�_
ij�_
ij
q¼
�������c
and=or P ¼ Pcutoff ð113Þ
the material loses its carrying capacity, where �k kc is the critical damagewhen catastrophic failure in the material takes place and Pcutoff is thepressure cutoff value when tensile failure or compressive failure occurs.If either of the conditions in Equation (113) is satisfied, the stress fieldis assumed zero at the corresponding point. This describes the mainfeature observed experimentally that the load tends to zero at the fracturepoint.
CONCLUSIONS
We have presented in this article a general thermodynamic frameworkfor the formulation of a coupled plastic-damage constitutive model forsoftening media in the finite strain range. This framework is based on theassumption of the nonlocal gradient-enhanced continua. A systematicconstruction of a hypoelasto-thermoviscoplastic and thermoviscodamageconstitutive model destined for solving high velocity impact relatedproblems is shown in detail. Thermodynamic consistency is restoredthrough the derived constitutive equations to introduce and addressissues, such as the statistical inhomogeneity in the evolution relatedviscoinelasticity state variables, and temperature, pressure, and strain-ratesensitivity. The interaction of length-scales is a crucial factor in under-standing and controlling the distribution and size of the material defects,such as statistically stored and geometrically necessary dislocations,microvoids, and microcracks influence on the overall macroscopic response.In conclusion, this work has identified a framework leading to a physicallymotivated modeling of plastic-damage in materials. In addition, this contextprovides the proper multiscale treatment for the regularization of thelocalized failure of the material.
The proposed gradient approach introduces second-order gradients in thehardening variables (isotropic and kinematic) and in the damage variable.These higher-order gradients are considered physically and mathemati-cally related to their local counterparts. Special care is used to properly
328 R. K. ABU AL-RUB AND G. Z. VOYIADJIS

account for the coupling between the state variable and their correspond-ing higher-order gradients. However, the phenomenological nature ofthe proposed gradient-dependent theory leads to numerous materialparameters, which are difficult to be fully determined based on the limitednumber of micromechanical, gradient-dominant experiments (such asmicroindentation, microbending, and microtorsion tests).
Length-scale parameters are implicitly and explicitly introduced into thepresent dynamical formalism. Implicit length-scale measure is introducedthrough the use of rate-dependent theory, while explicit length-scalemeasures are introduced through the use of nonlocal theory.
A detailed description of the computational aspects and numericalschemes for the integration of the resulting strongly coupled system ofconstitutive equations is presented in the companion article of Part II ofthis work.
ACKNOWLEDGMENT
The authors acknowledge the financial support under grant numberF33601-01-P-0343 provided by the Air Force Institute of Technology,WPAFB, Ohio. The authors also acknowledge the financial support undergrant number M67854-03-M-6040 provided by the Marine Corps SystemsCommand, AFSS PGD, Quantico, Virginia.
REFERENCES
Abu Al-Rub, R.K. and Voyiadjis, G.Z. (2003). On the Coupling of Anisotropic Damage andPlasticity Models for Ductile Materials, Int. J. Solids Struct., 40(11): 2611–2643.
Abu Al-Rub, R.K. and Voyiadjis, G.Z. (2004). Analytical and Experimental Determinationof the Material Intrinsic Length Scale of Strain Gradient Plasticity Theoryfrom Micro- and Nano-indentation Experiments, International Journal of Plasticity,20(6): 1139–1182.
Acharya, A. and Bassani, J.L. (2000). Lattice Incompatibility and a Gradient Theory of CrystalPlasticity, Journal of Mechanics and Physics of Solids, 48: 1565–1595.
Aifantis, E.C. (1984). On the Microstructural Origin of Certain Inelastic Models, J. of Eng.Materials and Tech., 106: 326–330.
Aifantis, E.C. (1992). On the Role of Gradients in the Localization of Deformation andFracture, International Journal of Engineering Science, 30: 1279–1299.
Aifantis, E.C., Oka, F., Yashima, A. and Adachi, T. (1999). Instability of Gradient DependentElastoviscoplasticity for Clay, International Journal for Numerical and Analytical Methodsin Geomechanics, 23(10): 973–994.
Askes, H., Pamin, J. and de Borst, R. (2000). Dispersion Analysis and Element-Free GalerkinSolutions of Second- and Fourth-Order Gradient Enhanced Damage Models, Int. J.Numer. Meth. Engng., 49: 811–832.
Finite Strain Plastic-damage Model for High Velocity Impact – Part I 329

Bammann, D.J, Chiesa, M.L., McDonald, A., Kawahara, W.A., Dike, J.J. and Revelli, V.D.(1990). Prediction of Ductile Failure in Metal Structures, AMD, 107: 7–12.
Bammann, D.J., Mosher, D., Hughes, D.A., Moody, N.R. and Dawson, P.R. (1999).Using Spatial Gradients to Model Localization Phenomena, Sandia National LaboratoriesReport, SAND99-8588, Albuquerque, New Mexico 87185 and Livermore, CA.
Bazant, Z.P. and Jirasek, M. (2002). Nonlocal Integral Formulations ofPlasticity and Damage: Survey of Progress, Journal of Engineering Mechanics, ASCE,128(11): 1119–1149.
Bazant, Z.P. and Ozbolt, J. (1990). Nonlocal Microplane Model for Fracture, Damageand Size Effect in Structures, J. Engrg. Mech., ASCE, 116(11): 2485–2505.
Bazant, Z.P. and Pijaudier-Cabot, G. (1988). Nonlocal Continuum Damage,Localization Instability and Convergence, Journal of Applied Mechanics, 55: 287–293.
Belytschko, T., Liu, W.K. and Moran, B. (2000). Nonlinear Finite Element for Continuaand Structures, John Wiley & Sons Ltd., England.
Bjerke, T., Zhouhua, L. and Lambros, J. (2002). Role of Plasticity in Heat Generation DuringHigh Rate Deformation and Fracture of Polycarbonate, Int. J. Plasticity, 18: 549–567.
Borvik, T., Langseth, M., Hopperstad, O.S. and Malo, K.A. (2002). Perforation of 12mmThick Steel Plates by 20mm Diameter Projectiles with Flat, Hemispherical andConical Noses – Part I: Experimental Study, International Journal of Impact Engineering,27(1): 19–35.
Chaboche, J.-L. (1991). Thermodynamically based Viscoplastic Constitutive Equations:Theory Versus Experiment, In: High Temperature Constitutive Modeling – Theory andApplication, MD-Vol.26/AMD-Vol. 121, ASME, pp. 207–226, American Society ofMechanical Engineers, Materials Division, Atlanta, GA.
Chen, S.H. and Wang, T.C. (2002). A New Deformation Theory with Strain GradientEffects, International Journal of Plasticity, 18: 971–995.
Chow, C.L. and Wang, J. (1987). An Anisotropic Theory of Continuum Damage Mechanicsfor Ductile Fracture, Engineering Fracture Mechanics, 27(5): 547–558.
Coleman, B. and Gurtin, M. (1967). Thermodynamics with Internal StateVariables, The Journal of Chemical Physics, 47(2): 597–613.
Curran, D.R., Seaman, L. and Shockey, D.A. (1987). Dynamic Failure of Solids,Physics Reports, 147: 253–388.
de Borst, R. and Muhlhaus, H.-B. (1992). Gradient-Dependent Plasticity Formulation andAlgorithmic Aspects, Int. J. Numer. Methods Engrg., 35: 521–539.
de Borst, R. and Pamin, J. (1996). Some Novel Developments in Finite Element Proceduresfor Gradient Dependent Plasticity, Int. J. Numer. Methods Engrg., 39: 2477–2505.
de Borst, R. and Sluys, L.J. (1991). Localization in a Cosserate Continuum UnderStatic and Dynamic Loading Conditions, Computer Methods in Applied Mechanics andEngineering, 90: 805–827.
de Borst, R., Pamin, J. and Geers, M. (1999). On Coupled Gradient-Dependent Plastcityand Damage Theories with a View to Localization, Eur. J. Mech. A/Solids, 18: 939–962.
de Borst, R., Sluys, L.J., Muhlhaus, H.-B. and Pamin, J. (1993). Fundamental Issues in FiniteElement Analysis of Localization of Deformation, Engineering Computations, 10: 99–121.
Di Prisco, C., Imposimato, S. and Aifantis, E.C. (2002). A Visco-plastic Constitutive Model forGranular Soils Modified According to Non-local and Gradient Approaches, Int. J. Num.Anal. Meth. Geomechanics, 26(2): 121–138.
Doghri, I. (2000). Mechanics of Deformable Solids: Linear and Nonlinear, Analytical andComputational Aspects, Springer, Germany.
Dornowski, W. and Perzyna, P. (2000). Localization Phenomena in Thermo-Viscoplastic FlowProcesses Under Cyclic Dynamic Loadings, Computer Assisted Mechanics and EngineeringSciences, 7: 117–160.
330 R. K. ABU AL-RUB AND G. Z. VOYIADJIS

Eftis, J., Carrasco, C. and Osegueda, R.A. (2003). A Constitutive-Microdamage Model toSimulate Hypervelocity Projectile-Target Impact, Material Damage and Fracture,International Journal of Plasticity, 19: 1321–1354.
Eringen, A.C. and Edelen, D.G.B. (1972). On Non-Local Elasticity, Int. J. Engrg. Sci.,10: 233–248.
Fleck, N.A. and Hutchinson, J.W. (1997). Strain Gradient Plasticity, Adv. Appl. Mech.,33: 295–361.
Fleck, N.A., Muller, G.M., Ashby, M.F. and Hutchinson, J.W. (1994). Strain GradientPlasticity: Theory and Experiment, Acta Metallurgica et Materialia, 42: 475–487.
Fremond, M. and Nedjar, B. (1996). Damage, Gradient of Damage and Principle of VirtualPower, Int. J. Solids and Struct., 33(8): 1083–1103.
Ganghoffer, J.F., Sluys, L.J. and de Borst, R. (1999). A Reappraisal of Nonlocal Mechanics,Eur. J. Mech. A/Solids, 18: 17–46.
Gao, H., Huang, Y., Nix, W.D. and Hutchinson, J.W. (1999). Mechanism-Based StrainGradient Plasticity – I. Theory, Journal of the Mechanics and Physics of Solids, 47(6):1239–1263.
Geers, M.G.D., Peerlings, R.H.J., Brekelmans, W.A.M. and de Borst, R. (2000).Phenomenological Nonlocal Approaches Based on Implicit Gradient-EnhancedDamage, Acta Mechanica, 144: 1–15.
Glema, A., Lodygowski, T. and Perzyna, P. (2000). Interaction of Deformation Wavesand Localization Phenomena in Inelastic Solids, Comput. Methods Appl. Mech. Engrg.,183: 123–140.
Gurtin, M.E. (2002). A Gradient Theory of Single-Crystal Viscoplasticity that Accountsfor Geometrically Necessary Dislocations, J. Mech. Phys. Solids, 50(1): 5–32.
Gurtin, M.E. (2003). On a Framework for Small-Deformation Viscoplasticity: Free Energy,Microforces, Strain Gradients, International Journal of Plasticity, 19: 47–90.
Hansen, N.R. and Schreyer, H.L. (1994). Thermodynamically Consistent Frameworkfor Theories of Elastoplasticity Coupled with Damage, Int. J. Solids Structures, 31(3):359–389.
Hou, J.P., Petrinic, N., Ruiz, C. and Hallett, S.R. (2000). Prediction of Impact Damage inComposite Plates, Composites Science and Technology, 60: 273–281.
Jirasek, M. and Rolshoven, S. (2003). Comparison of Integral-Type Nonlocal Plasticity Modelsfor Strain-Softening Materials, International Journal of Engineering Science, 41:1553–1602.
Johnson, G.R. and Cook, H.W. (1985). Fracture Characteristics of Three Metals Subjectedto Various Strains, Strain Rates, Temperature and Pressures, Engineering FractureMechanics, 21(1): 31–48.
Ju, J.W. (1989). On Energy-Based Coupled Elastoplastic Damage Theories: ConstitutiveModeling and Computational Aspects, Int. J. Solids Structures, 25: 803–833.
Kachanov, L.M. (1958). On the Creep Fracture Time, Izv Akad, Nauk USSR Otd. Tech.,8: 26–31 (in Russian).
Kroner, E. (1967). Elasticity Theory of Materials with Long Range Cohesive Forces,Int. J. Solids and Struct., 24: 581–597.
Kuhl, E., Ramm, E. and de Borst, R. (2000). An Anistropic Gradient Damage Model forQuasi-Brittle Materials, Comput. Methods Appl. Mech. Engrg., 183: 87–103.
Lacey, T.E., McDowell, D.L. and Talreja, R. (2000). Non-Local Concepts for Evolutionof Damage, Mech. of Mat., 31(12): 831–860.
Lasry, D. and Belytschko, T. (1988). Localization Limiters in Trasient Problems,Int. J. of Solids and Structures, 24: 581–597.
Lee, H., Peng, K. and Wang, J. (1985). An Anisotropic Damage Criterion for DeformationInstability and Its Application to Forming Limit Analysis of Metal Plates, Eng. Frac.Mech., 21: 1031–1054.
Finite Strain Plastic-damage Model for High Velocity Impact – Part I 331

Lemaitre, J. and Chaboche, J.-L. (1990). Mechanics of Solid Materials, Cambridge UniversityPress, London.
Li, S., Liu, W.K., Rosakis, A.J., Belystchko, T. and Hao, W. (2002). Mesh-Free GalerkinSimulations of Dynamic Shear Band Propagation and Failure Mode Transition, Int. J. ofSolids and Structures, 39: 1213–1240.
Liebe, T., Menzel, A. and Steinmann, P. (2003). Theory and Numerics of GeometricallyNon-linear Gradient Plasticity, International Journal of Engineering Science,41: 1603–1629.
Loret, B. and Prevost, H. (1990). Dynamics Strain Localization in Elasto-(Visco-)Plastic Solids,Part 1. General Formulation and One-Dimensional Examples, ComputerMethods in Applied Mechanics and Engineering, 83: 247–273.
Lubliner, J. (1990). Plasticity Theory, Macmillan Publishing Company, New York.
Muhlhaus, H.B. and Aifantis, E.C. (1991). A Variational Principle for GradientPrinciple, Int. J. Solids and Structures, 28: 845–857.
Murakami, S. and Ohno, N. (1981). A Continuum Theory of Creep and CreepDamage, In: Proc. 3rd IUTAM Symposium on Creep in Structures, Springer, Berlin,pp. 422–444.
Murakami, S., Hayakawa, K. and Liu, Y. (1998). Damage Evolution and Damage Surface ofElastic-Plastic-Damage Materials Under Multiaxial Loading, Int. J. Damage Mech.,7: 103–128.
Naboulsi, S.K. and Palazotto, A.N. (2000). Thermodynamic Damage Model for CompositeUnder Severe Loading, Journal of Engineering Mechanics, 126(10): 1001–1011.
Needleman, A. (1988). Material Rate Dependent and Mesh Sensitivity in LocalizationProblems, Computer Methods in Applied Mechanics and Engineering, 67: 68–85.
Oka, F., Yashima, A., Sawada, K. and Aifantis, E.C. (2000). Instability of Gradient-DependentElastoviscoplastic Model for Clay and Strain Localization Analysis, Computer Methods inApplied Mechanics and Engineering, 183(1): 67–86.
Pamin, J. (1994). Gradient-Dependent Plasticity in Numerical Simulation of LocalizationPhenomena, Dissertation, Delft University of Technology.
Peerlings, R.H.J., de Borst, R., Brekelmans, W.A.M. and de Vree, J.H.P. (1996). GradientEnhanced Damage for Quasi-Brittle Materials, Int. J. Numer. Methods in Engrg.,39: 3391–3403.
Perzyna, P. (1963). The Constitutive Equations for Rate-Sensitive Materials, Quart. Appl.Math., 20: 321–332.
Perzyna, P. (1988). Temperature and Rate Dependent Theory of Plasticity of Crystalline Solids,Rev. Phys. Applique, 23: 445–459.
Pijaudier-Cabot, T.G.P. and Bazant, Z.P. (1987). Nonlocal Damage Theory, ASCE Journalof Engineering Mechanics, 113: 1512–1533.
Prevost, H. and Loret, B. (1990). Dynamics Strain Localization in Elasto-(Visco-)Plastic Solids,Part 2. Plane Strain Examples, Computer Methods in Applied Mechanics and Engineering,83: 275–294.
Rabotnov, Yu.N. (1968). Creep Rupture, In: Proceedings of the XII International Congress onApplied Mechanics, Stanford-Springer, pp. 342–349.
Sidoroff, F. (1980). Description of Anisotiopic Damage Application to Elasticity,In: Hult, J. and Lemaitre, J. (eds), IUTAM Colloqium on Physical Nonlinearitiesin Structural Analysis, pp. 237–244, Springer-Verlag, Berlin, Germany.
Sierakowski, R.L. (1997). Strain Rate Effects in Composites, ASME Applied MechanicsReviews, 50(12) pt 1: 741–761.
Simo, J.C. and Honein, T. (1990). Variational Formulation, Discrete Conservation Lawsand Path Domain Independent Integrals for Elasto-Viscoplasticity, Journal of AppliedMechanics.
332 R. K. ABU AL-RUB AND G. Z. VOYIADJIS

Simo, J.C. and Hughes, T.J.R. (1998). Computational Inelasticity, In: Marsden, J.E.,Sirovich, L. and Wiggins, S. (eds), Interdisciplinary Applied Mathematics, Vol. 7, Springer,New York.
Sluys, L.J. (1992). Wave Propagation, Localization and Dispersion in Softening Solids,PhD Thesis, Delft University of Technology, Netherlands.
Steinberg, D.J. and Lund, C.M. (1989). A Constitutive Model for Strain Rates from 10�4 to106/s, J. Appl. Phys., 65(4): 1528–1533.
Steinberg, D.J., Cochran, S.G. and Guinan, M.W. (1980). A Constitutive Model for MetalsApplicable at High-Strain Rate, J. Appl. Phys., 51(3): 1498–1504.
Stelmashenko, N.A., Walls, M.G., Brown, L.M. and Milman, Y.V. (1993). Microindentationon W and Mo Oriented Single Crystals: An STM Study, Acta Metallurgica et Materialia,41: 2855–2865.
Stolken, J.S. and Evans, A.G. (1998). A Microbend Test Method for Measuring the PlasticityLength-Scale, Acta Mater., 46: 5109–5115.
Svedberg, T. and Runesson, K. (2000). An Adaptive Finite Element Algorithm for GradientTheory of Plasticity with Coupling to Damage, Int. J. of Solids and Structures,37: 7481–7499.
Voyiadjis, G.Z. and Abed, F.H. (2005).Microstructural BasedModels for BCC and FCCMetalswith Temperature and Strain Rate Dependency, Mechanics of Materials, 37: 355–378.
Voyiadjis, G.Z. and Abu Al-Rub, R.K. (2004). Length Scales in Gradient Plasticity, In: Ahzi,S., Cherkaoui, M., Khaleel, M.A., Zbib, H.M., Zikry, M.A. and LaMatina, B. (eds),Proceedings of the IUTAM Symposium October 2002 on Multiscale Modeling andCharacterization of Elastic-Inelastic Behavior of Engineering Materials, Kluwer AcademicPublishers, Morocco, pp. 167–174.
Voyiadjis, G.Z. and Abu Al-Rub, R.K. (2005). Gradient Plasticity Theory with aVariable Length Scale Parameter, International Journal of Solids and Structures, 42(14):3998–4029.
Voyiadjis, G.Z. and Deliktas, B. (2000). A Coupled Anisotropic Damage Model for theInelastic Response of Composite Materials, Comput. Methods Appl. Mech. Engrg.,183: 159–199.
Voyiadjis, G.Z. and Kattan, P.I. (1992a). A Plasticity-Damage Theory for Large Deformationsof Solids. Part I: Theoretical Formulation, Int. J. Engng. Sci., 30: 1089–1108.
Voyiadjis, G.Z. and Kattan, P.I. (1992b). Finite Strain Plasticity and Damage in ConstitutiveModeling of Metals with Spin Tensors, Appl. Mech. Rev., 45: S95–S109.
Voyiadjis, G.Z. and Kattan, P.I. (1999). Advances in Damage Mechanics: Metals and MetalsMatrix Composites, Elsevier, Oxford.
Voyiadjis, G.Z. and Park, T. (1997). Local and Interfacial Damage Analysis of Metal MatrixComposites Using Finite Element Method, Engineering Fracture Mechanics, 56(4):483–511.
Voyiadjis, G.Z. and Park, T. (1999). The Kinematics of Damage for Finite-strain Elasto-plasticSolids, International Journal of Engineering Science, 37(7): 803–830.
Voyiadjis, G.Z. and Thiagarajan, G. (1997). Micro and Macro Anisotropic Cyclic Damage-Plasticity Models for MMCS, Int. J. Engng. Sci., 35(5): 467–484.
Voyiadjis, G.Z. and Venson, A.R. (1995). Experimental Damage Investigation of a SiC-TiAluminide Metal Matrix Composite, Int. J. Damage Mech., 4: 338–361.
Voyiadjis, G.Z., Abu Al-Rub, R.K. and Palazotto, A.N. (2003). Non-Local Coupling ofViscoplasticity and Anisotropic Viscodamage for Impact Problems Using the GradientTheory, Archives of Mechanics, 55: 39–89.
Voyiadjis, G.Z., Abu Al-Rub, R.K. and Palazotto, A.N. (2004). Thermodynamic Formulationsfor Non-Local Coupling of Viscoplasticity and Anisotropic Viscodamage for DynamicLocalization Problems Using Gradient Theory, International Journal of Plasticity,20: 981–1038.
Finite Strain Plastic-damage Model for High Velocity Impact – Part I 333

Voyiadjis, G.Z., Deliktas, B. and Aifantis, E.C. (2001). Multiscale Analysis of Multiple DamageMechanics Coupled with Inelastic Behavior of Composite Materials, Journal ofEngineering Mechanics, 127(7): 636–645.
Wang, W.M. and Sluys, L.J. (2000). Formulation of an Implicit Algorithm for FiniteDeformation Viscoplasticity, Int. J. of Solids and Structures, 37(48–50): 7329–7348.
Wang, W.M., Askes, H. and Sluys, L.J. (1998). Gradient Viscoplastic Modeling of MaterialInstabilities in Metals, Metals and Materials-Korea, 4(3): 537–542.
Wang, W.M., Sluys, L.J. and de Borst, R. (1996). Interaction Between Material Length Scaleand Imperfection Size for Localization Phenomena in Viscoplastic Media, EuropeanJournal of Mechanics, A/Solids, 15(3): 447–464.
Zbib, H.M. and Aifantis, E.C. (1988). On the Localization and Postlocalization Behaviorof Plastic Deformation, I, II, III, Res. Mechanica, 23: 261–277, 279–292, 293–305.
Zbib, H.M. and Aifantis, E.C. (1992). On the Gradient-Dependent Theory of Plasticity andShear Banding, Acta Mechanica, 92: 209–225.
Zerilli, F.J. and Armstrong, R.W. (1987). Dislocation-Mechanics-Based Constitutive Relationsfor Material Dynamics Calculations, Journal of Applied Physics, 61(5): 445–459.
Zhou, M., Rosakis, A.J. and Ravichandran, G. (1996). Dynamically Propagating Shear Bandsin Impact-Loaded Prenotched Plates-I. Experimental Investigations of TemperatureSignatures and Propagation Speed, J. Mech. Phys. Solids, 44(6): 981–1006.
Zukas, J.A. (ed.) (1990). High Velocity Impact Dynamics, John Wiley & Sons, Inc., New York.
334 R. K. ABU AL-RUB AND G. Z. VOYIADJIS


















